
Tracking and Synchronization with Inversion-Based ILC for a Multi-Actuator-Driven Wafer Inspection Cartridge Transport Robot System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Definitions
3. An Inversion-Based Iterative Learning Control
3.1. Algorithm
3.2. Convergence Condition
4. Simulation
4.1. Dual-Drive System
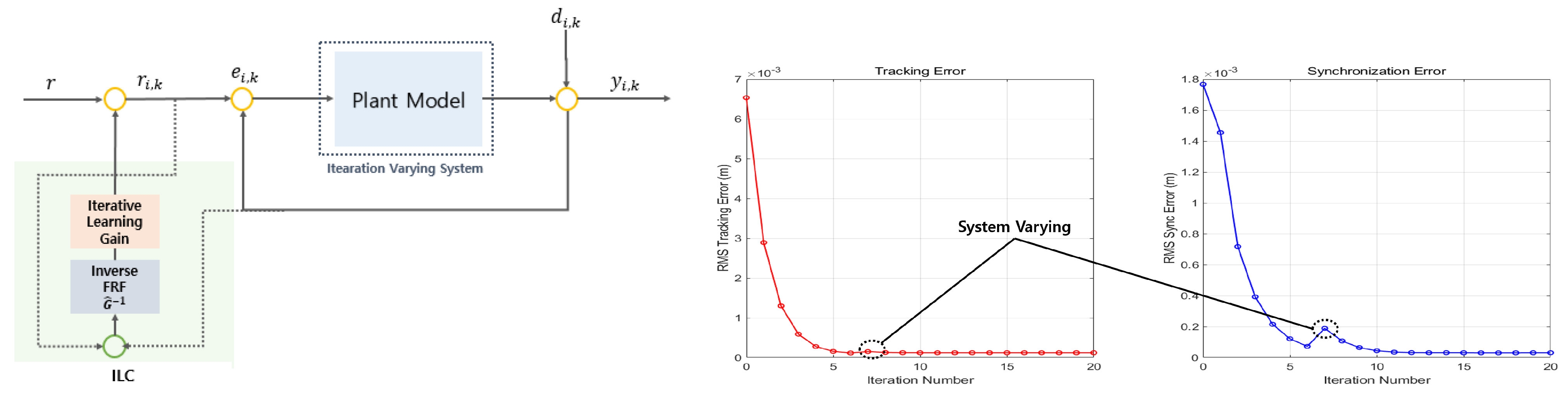
4.2. Iteration-Varying System
5. Experiment
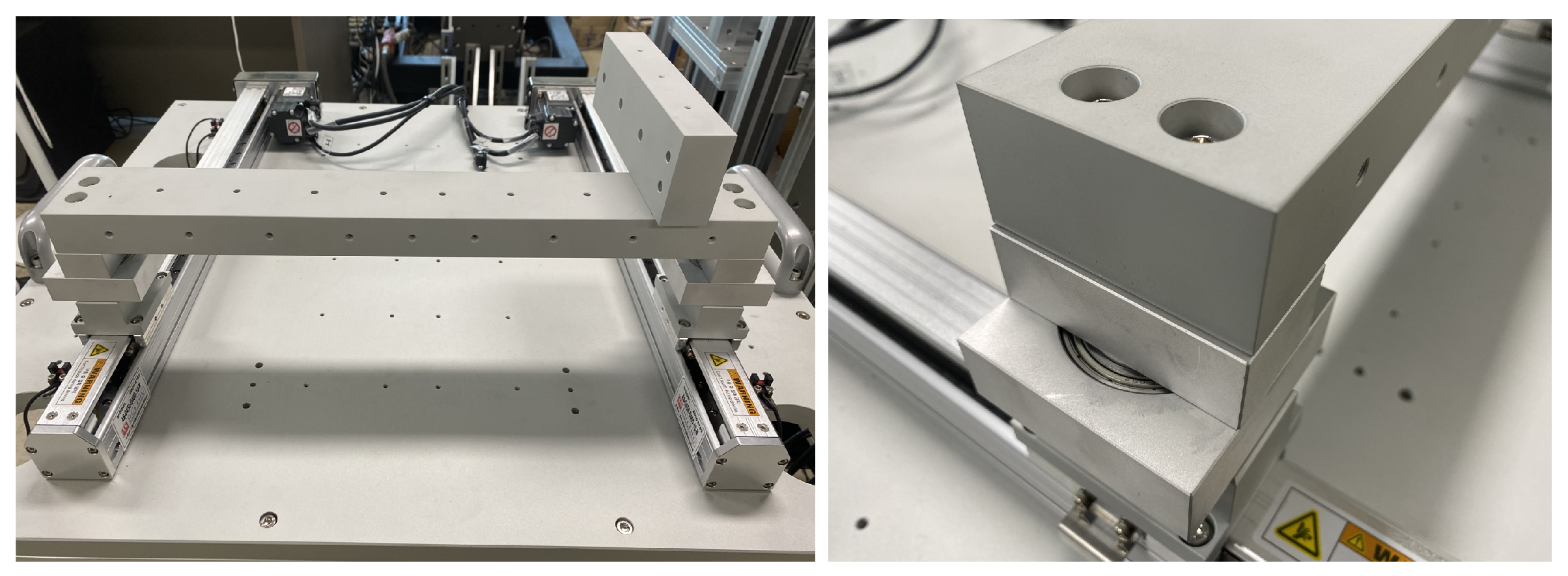
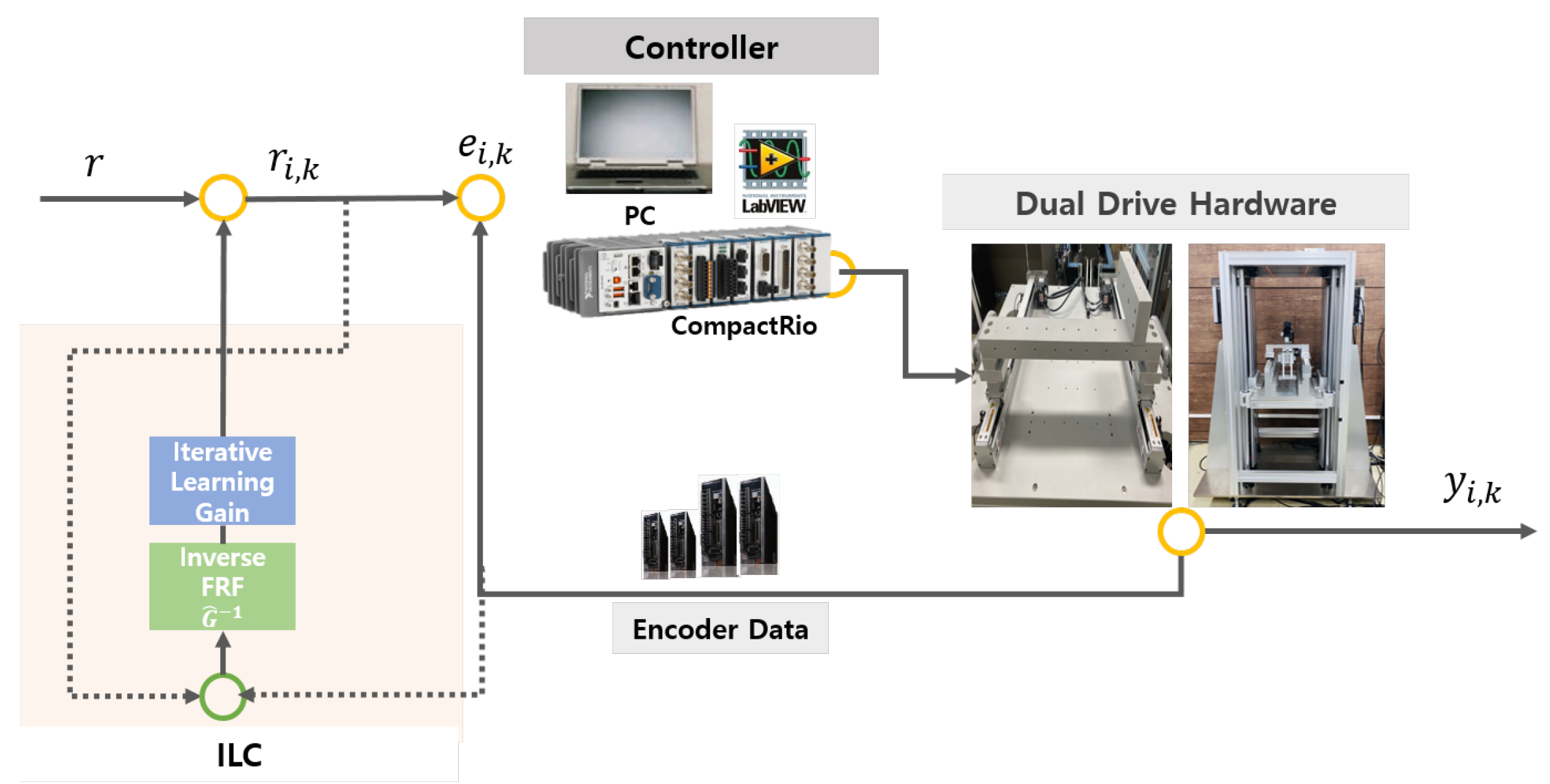
5.1. Experiment Setup
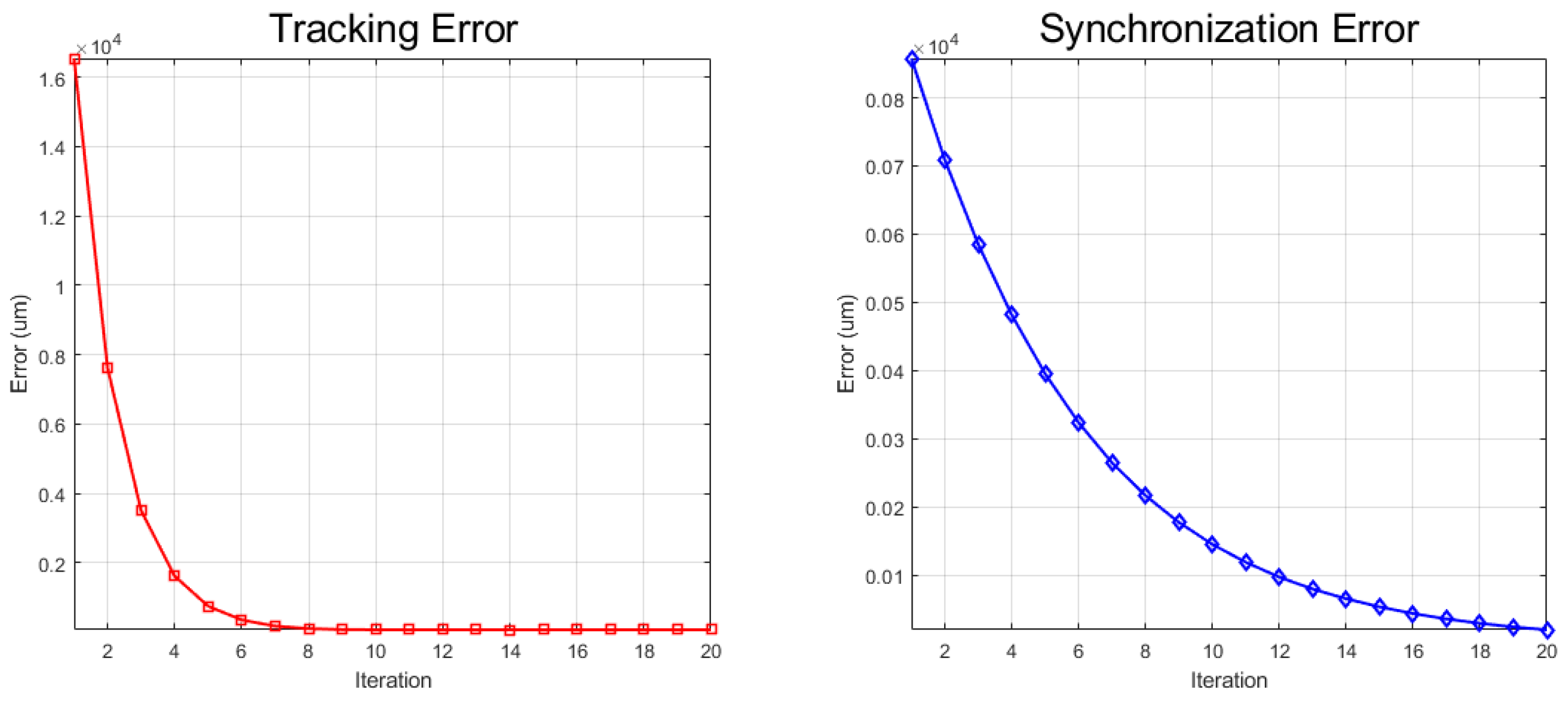
5.2. Dual-Actuator Gantry
5.2.1. Basic Controller Performance Test
5.2.2. Iteration-Varying Test
5.2.3. Robustness on Nonlinearity
5.3. Multi-Probe Wafer-Inspection System
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, C.-S.; Chen, L.-Y. Robust cross-coupling synchronous control by shaping position commands in multiaxes system. IEEE Trans. Ind. Electron. 2012, 59, 4761–4773. [Google Scholar] [CrossRef]
- Li, L.-B.; Sun, L.-L.; Zhang, S.-Z.; Yang, Q.-Q. Speed tracking and synchronization of multiple motors using ring coupling control and adaptive sliding mode control. ISA Trans. 2015, 58, 635–649. [Google Scholar] [CrossRef]
- Nam, K.T.; Lee, S.M.; Lee, S.J.; Lee, K.H.; Choo, S.W. Substrate Testing Cartridge and Method for Manufacturing Same. U.S. Patent Application No. 16/652174, 6 August 2020. [Google Scholar]
- Genkin, V.V.; Pronin, A.N.; Peters, J.A. Probe Card System for Testing an Integrated Circuit. U.S. Patent No. 11002761, 11 May 2021. [Google Scholar]
- Kamaldin, N.; Chen, S.L.; Teo, C.S.; Lin, W.; Tan, K.K. A novel adaptive jerk control with application to large workspace tracking on a flexure-linked dual-drive gantry. IEEE Trans. Ind. Electron. 2019, 66, 5353–5363. [Google Scholar] [CrossRef]
- Lorenz, R.D.; Schmidt, P.B. Synchronized motion control for process automation. In Proceedings of the Conference Record of the IEEE Industry Applications Society Annual Meeting, San Diego, CA, USA, 1–5 October 1989; pp. 1693–1698. [Google Scholar]
- Mori, T.; Hiramatsu, T.; Shamoto, E. Simultaneous double-sided milling of flexible plates with high accuracy and high efficiency—Suppression of forced chatter vibration with synchronized single-tooth cutters. Precis. Eng. 2011, 35, 416–423. [Google Scholar] [CrossRef]
- Wang, S.-M.; Wang, R.-J.; Tsooj, S. A new synchronous error control method for cnc machine tools with dual-driving systems. Int. J. Precis. Eng. Manuf. 2013, 14, 1415–1419. [Google Scholar] [CrossRef]
- Chen, S.-L.; Lin, W.; Chang, T. Tracking control for a synchronized dual parallel linear motor machine tool. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2008, 222, 851–862. [Google Scholar] [CrossRef]
- Kim, S.; Chu, B.; Hong, D.; Park, H.-K.; Park, J.-M.; Cho, T.-Y. Synchronizing dual-drive gantry of chip mounter with lqr approach. In Proceedings of the 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), Kobe, Japan, 20–24 July 2003; Volume 2, pp. 838–843. [Google Scholar]
- Tsai, M.-C.; Shen, B.-H. Synchronisation control of parallel dual inverted pendulums driven by linear servomotors. IET Control Theory Appl. 2008, 1, 320–327. [Google Scholar] [CrossRef]
- Ishizaki, K.; Sencer, B.; Shamoto, E. Cross coupling controller for accurate motion synchronization of dual servo systems. IJAT 2013, 7, 514–522. [Google Scholar] [CrossRef]
- Wang, M.; Ren, X.; Chen, Q. Cascade optimal control for tracking and synchronization of a multimotor driving system. IEEE Trans. Control Syst. Technol. 2018, 27, 1376–1384. [Google Scholar] [CrossRef]
- Lin, F.-J.; Chou, P.-H.; Chen, C.-S.; Lin, Y.-S. Dsp-based cross-coupled synchronous control for dual linear motors via intelligent complementary sliding mode control. IEEE Trans. Ind. Electron. 2011, 59, 1061–1073. [Google Scholar] [CrossRef]
- Wang, M.; Ren, X.; Chen, Q. Robust tracking and distributed synchronization control of a multi-motor servomechanism with h-infinity performance. ISA Trans. 2018, 72, 147–160. [Google Scholar] [CrossRef]
- Wang, T.; Ge, J.; Li, T.; Chen, X.; Fei, S. Observer-based h∞ control for synchronization in delayed neural networks under multiple disturbances. Int. J. Control Autom. Syst. 2020, 18, 3121–3132. [Google Scholar] [CrossRef]
- Zhao, W.; Ren, X.; Wang, S. Parameter estimation-based time-varying sliding mode control for multimotor driving servo systems. IEEE/ASME Trans. Mechatron. 2017, 22, 2330–2341. [Google Scholar] [CrossRef]
- Kuang, Z.; Gao, H.; Tomizuka, M. Precise linear-motor synchronization control via cross-coupled second-order discrete-time fractional-order sliding mode. IEEE/ASME Trans. Mechatron. 2021, 26, 358–368. [Google Scholar] [CrossRef]
- Huang, J.; Zhang, J.; Huang, W.; Yin, C. Optimal speed synchronization control with disturbance compensation for an integrated motor-transmission powertrain system. J. Dyn. Syst. Meas. Control 2019, 141, 041001. [Google Scholar] [CrossRef]
- Li, C.; Yao, B.; Wang, Q. Modeling and synchronization control of a dual drive industrial gantry stage. IEEE/ASME Trans. Mechatron. 2018, 23, 2940–2951. [Google Scholar] [CrossRef]
- Li, C.; Chen, Z.; Yao, B. Advanced synchronization control of a dual-linear-motor-driven gantry with rotational dynamics. IEEE Trans. Ind. Electron. 2018, 65, 7526–7535. [Google Scholar] [CrossRef]
- Li, C.; Chen, Z.; Yao, B. Adaptive thrust allocation based synchronization control of a dual drive gantry stage. Mechatronics 2018, 54, 68–77. [Google Scholar] [CrossRef]
- Longman, R.W. Iterative learning control and repetitive control for engineering practice. Int. J. Control 2000, 73, 930–954. [Google Scholar] [CrossRef]
- Tayebi, A. Adaptive iterative learning control for robot manipulators. Automatica 2004, 40, 1195–1203. [Google Scholar] [CrossRef]
- Mishra, S.; Coaplen, J.; Tomizuka, M. Precision positioning of wafer scanners segmented iterative learning control for nonrepetitive disturbances [applications of control]. IEEE Control Syst. Mag. 2007, 27, 20–25. [Google Scholar]
- Chien, C.-J.; Liu, J.-S. A p-type iterative learning controller for robust output tracking of nonlinear time-varying systems. Int. J. Control 1996, 64, 319–334. [Google Scholar] [CrossRef]
- Gu, P.; Tian, S. P-type iterative learning control with initial state learning for one-sided lipschitz nonlinear systems. Int. J. Control Autom. Syst. 2019, 17, 2203–2210. [Google Scholar] [CrossRef]
- Smolders, K.; Volckaert, M.; Swevers, J. Tracking control of nonlinear lumped mechanical continuous-time systems: A model-based iterative learning approach. Mech. Syst. Signal Process. 2008, 22, 1896–1916. [Google Scholar] [CrossRef]
- van Zundert, J.; Oomen, T. On inversion-based approaches for feedforward and ILC. Mechatronics 2018, 50, 282–291. [Google Scholar] [CrossRef] [Green Version]
- Yoon, D.; Ge, X.; Okwudire, C.E. Optimal inversion-based iterative learning control for overactuated systems. IEEE Trans. Control Syst. Technol. 2019, 28, 1948–1955. [Google Scholar] [CrossRef]
- Kim, K.-S.; Zou, Q. A modeling-free inversion-based iterative feedforward control for precision output tracking of linear time-invariant systems. IEEE/ASME Trans. Mechatron. 2012, 18, 1767–1777. [Google Scholar] [CrossRef]
- Cornelis, B.; Toso, A.; Verpoest, W.; Peeters, B. Improved mimo frf estimation and model updating for robust time waveform replication on durability test rigs. Int. Conf. Noise Vib. Eng. 2014, 1, 759–774. [Google Scholar]
- Huang, C.-C.; Chen, H.-C.; Huang, K.-W.; Fu, L.-C. Iterative Learning Controller with Learning Gain Optimization and Online Data Adjustment for Atomic Force Microscope. In Proceedings of the 2020 International Automatic Control Conference (CACS), Hsinchu, Taiwan, 4–7 November 2020; pp. 1–6. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oh, D.J.; Baek, S.G.; Nam, K.-T.; Koo, J.C. Tracking and Synchronization with Inversion-Based ILC for a Multi-Actuator-Driven Wafer Inspection Cartridge Transport Robot System. Electronics 2021, 10, 2904. https://doi.org/10.3390/electronics10232904
Oh DJ, Baek SG, Nam K-T, Koo JC. Tracking and Synchronization with Inversion-Based ILC for a Multi-Actuator-Driven Wafer Inspection Cartridge Transport Robot System. Electronics. 2021; 10(23):2904. https://doi.org/10.3390/electronics10232904
Chicago/Turabian StyleOh, Dong Jun, Seung Guk Baek, Kyung-Tae Nam, and Ja Choon Koo. 2021. "Tracking and Synchronization with Inversion-Based ILC for a Multi-Actuator-Driven Wafer Inspection Cartridge Transport Robot System" Electronics 10, no. 23: 2904. https://doi.org/10.3390/electronics10232904
APA StyleOh, D. J., Baek, S. G., Nam, K.-T., & Koo, J. C. (2021). Tracking and Synchronization with Inversion-Based ILC for a Multi-Actuator-Driven Wafer Inspection Cartridge Transport Robot System. Electronics, 10(23), 2904. https://doi.org/10.3390/electronics10232904