
Optimized Design of a Sonar Transmitter for the High-Power Control of Multichannel Acoustic Transducers


Abstract
:1. Introduction
- (1)
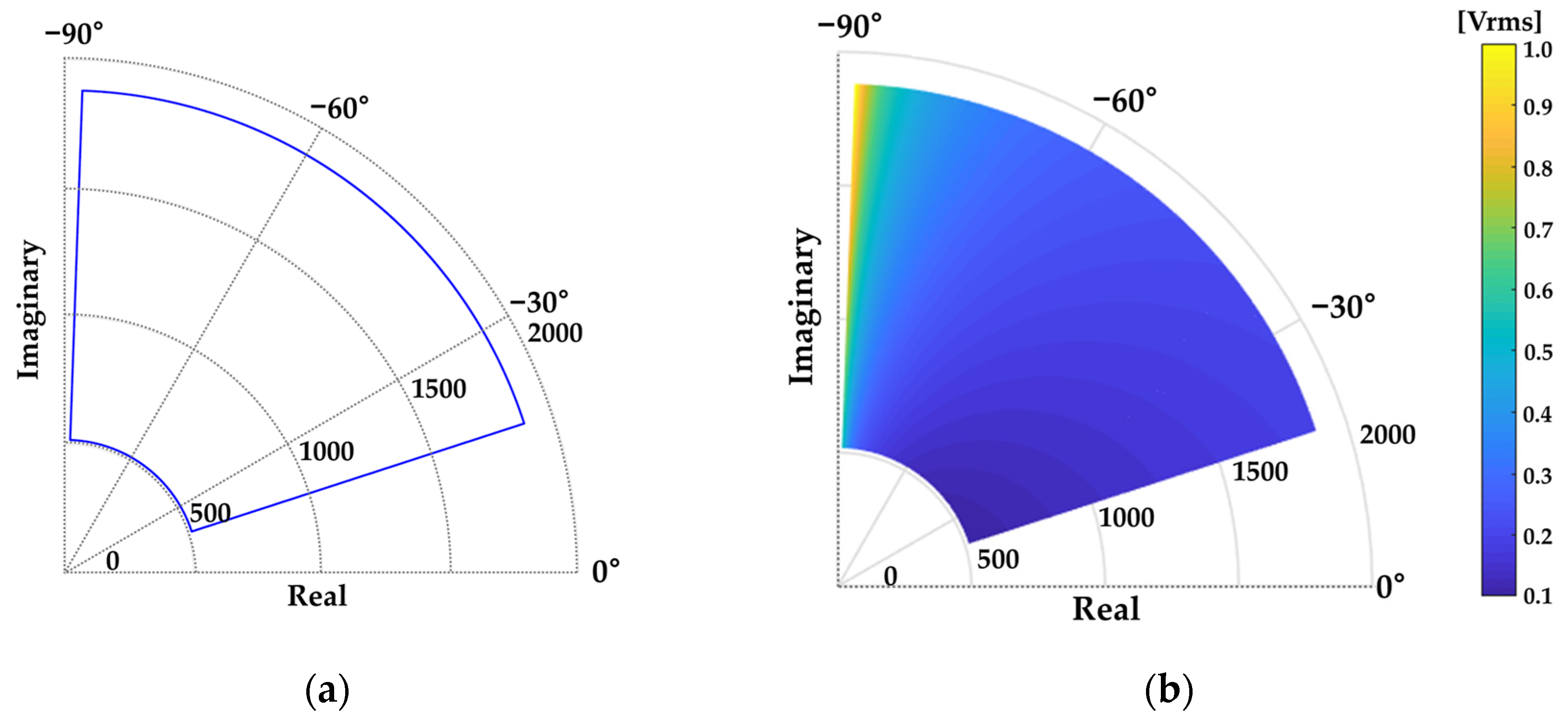
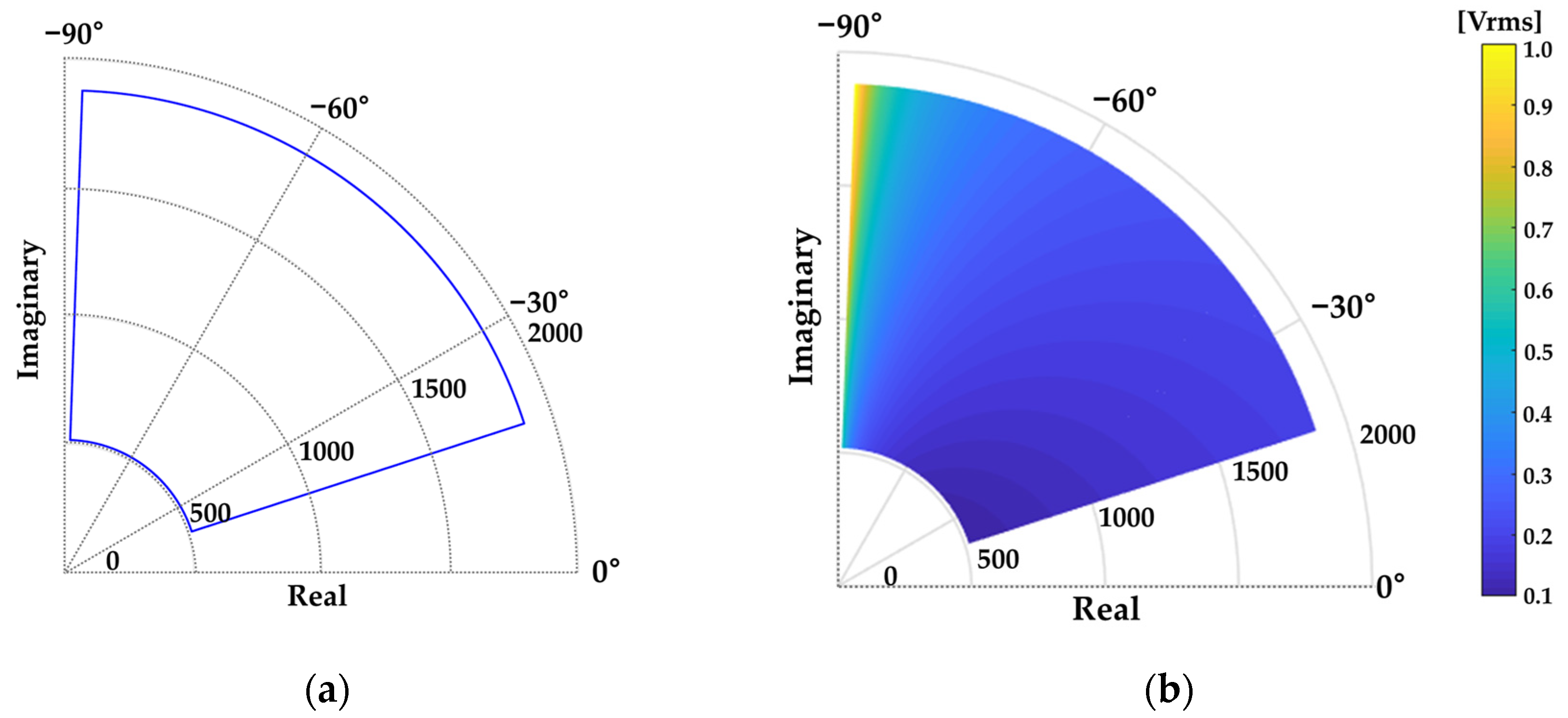
- In underwater acoustic transducers, the analysis of the impedance distribution is required in order to determine the rated power for driving the transducer;
- (2)
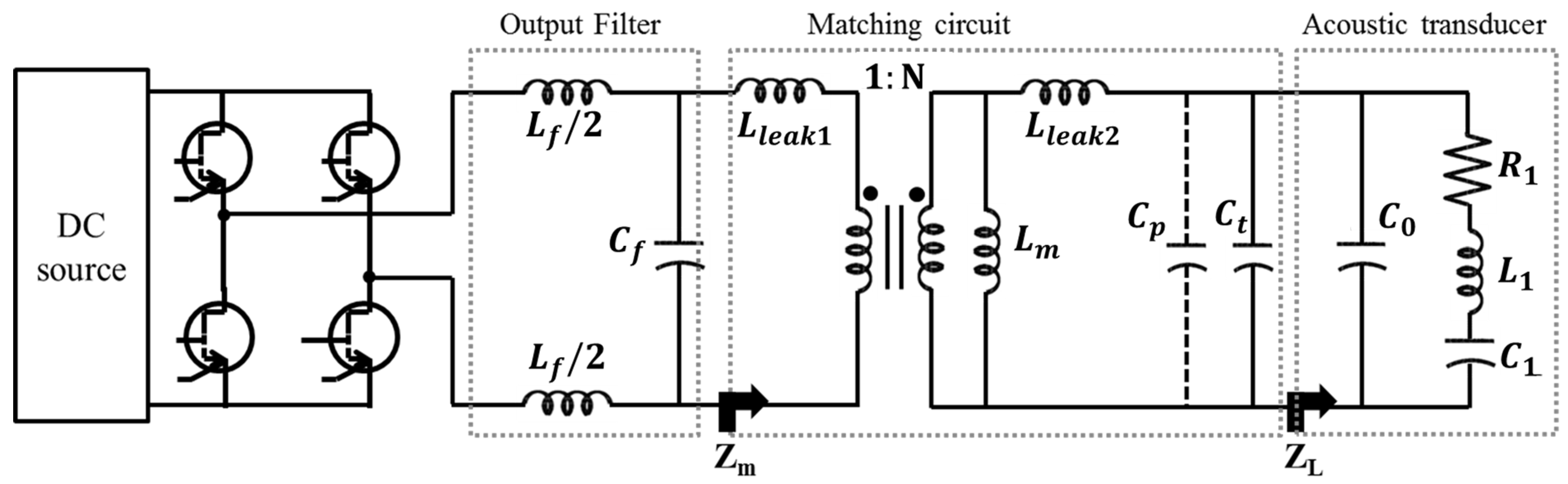
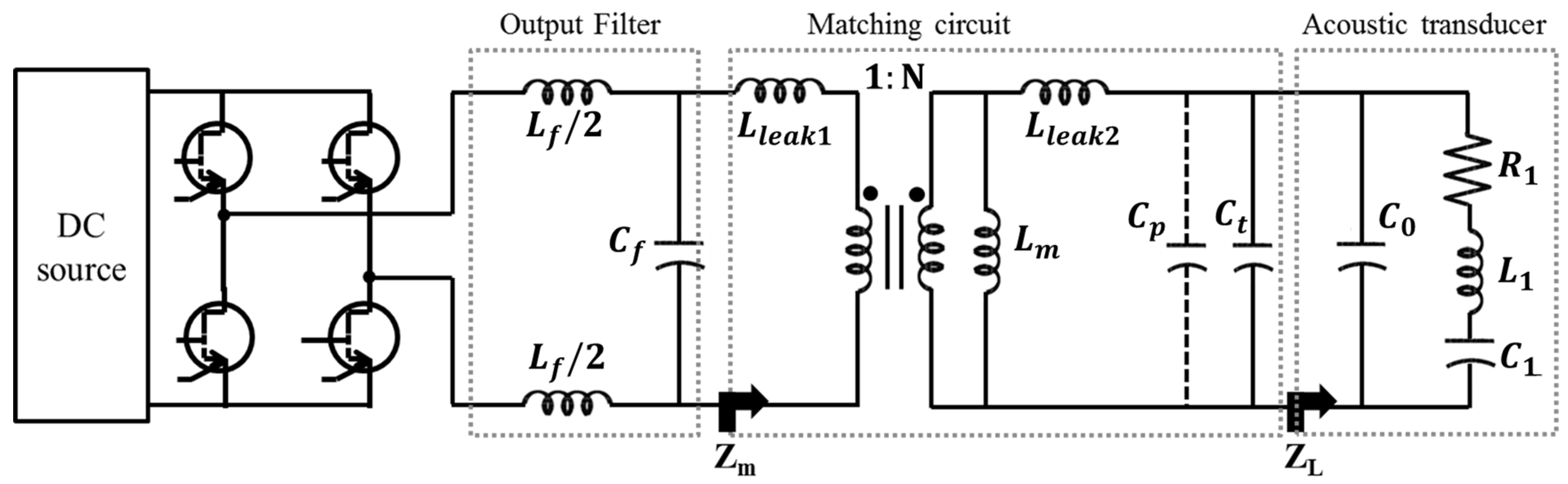
- To maximize the power factor (viz. minimizing reactance elements) and reduce THD, the impedance matching and filter circuits should be designed based on the equivalent circuit model of the transducer;
- (3)
- The frequency modulation (FM) is required in order to calculate the distance between a source and an object. The impedance of the transducer varies depending on the FM. For this reason, the output power of the transmitter should be maintained in the operation range.
2. Analysis of the Impedance Distribution
3. Design of the Sonar Transmitter
3.1. Design Process
3.2. The Acoustic Transducer
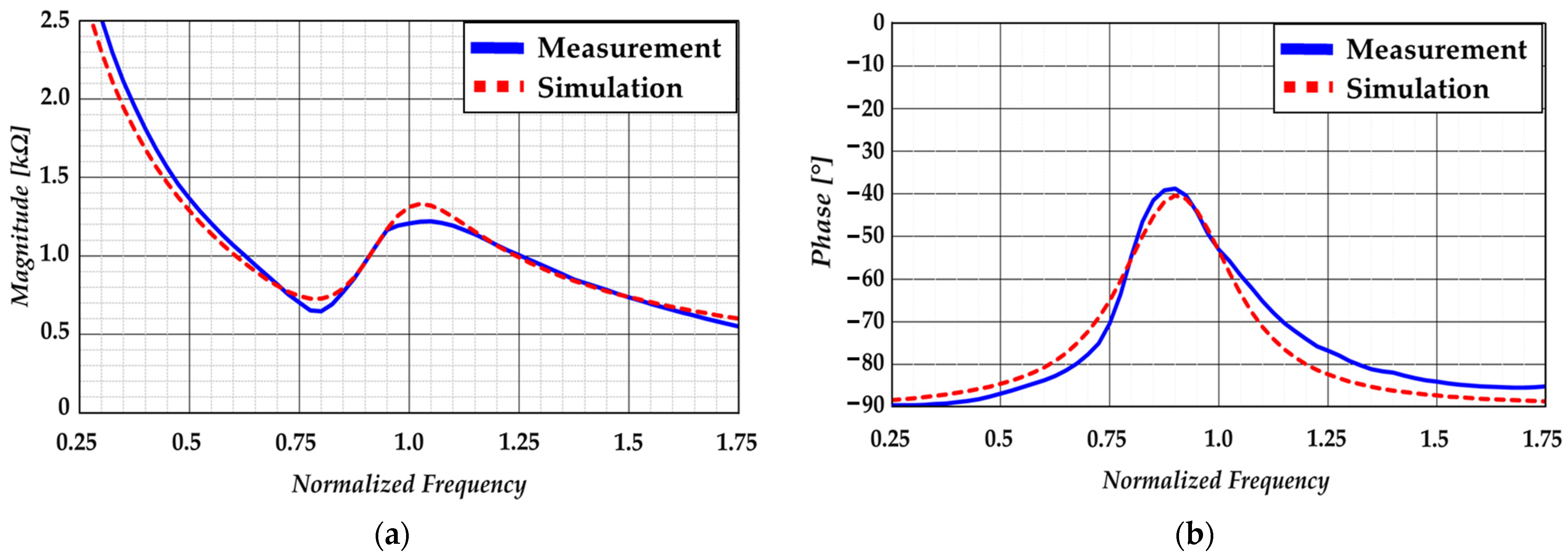
3.2.1. Estimation of the Equivalent Circuit Parameters
3.2.2. Results
3.3. The Matching Circuit
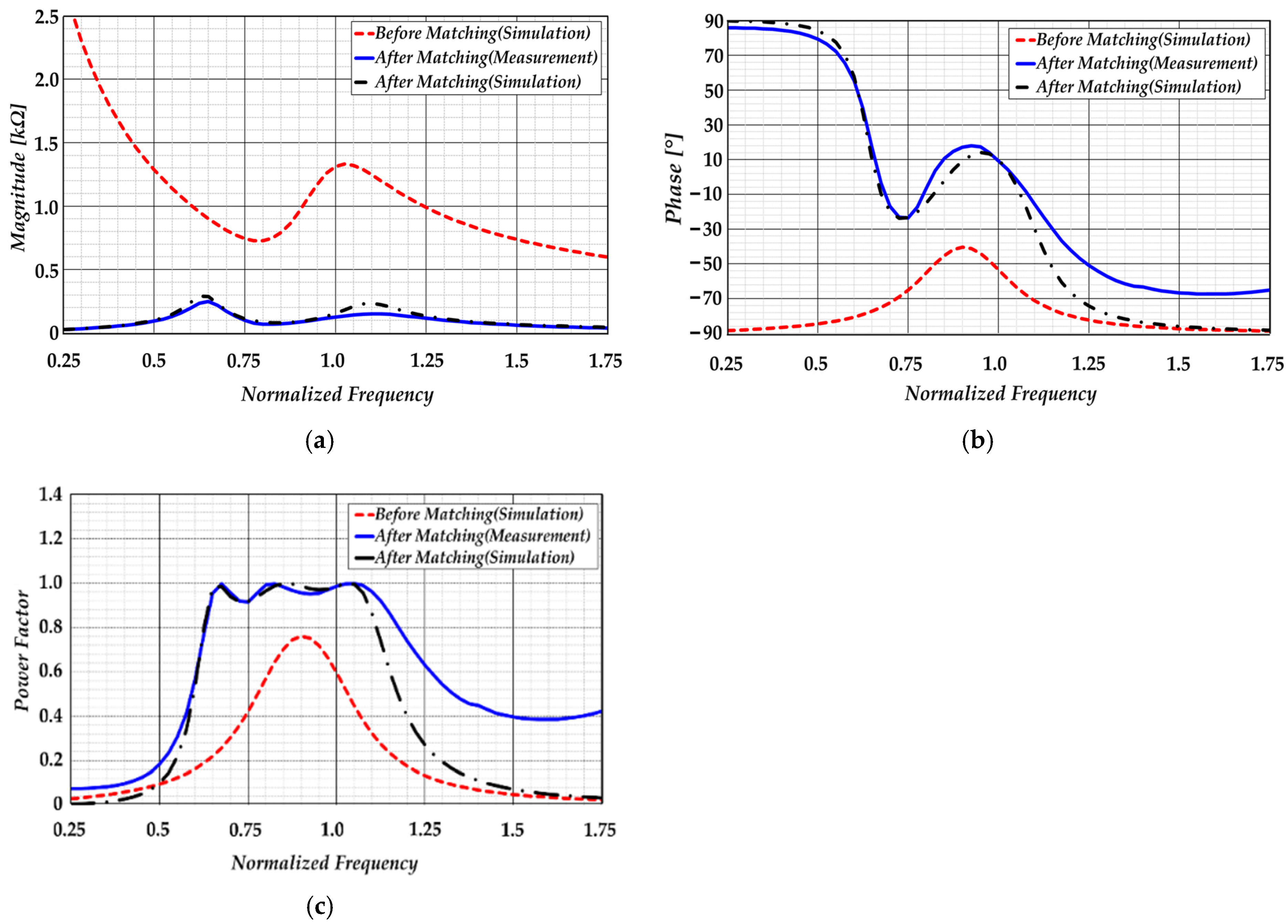
3.3.1. Estimation of the Matching Circuit Parameters
3.3.2. Experimental Setup
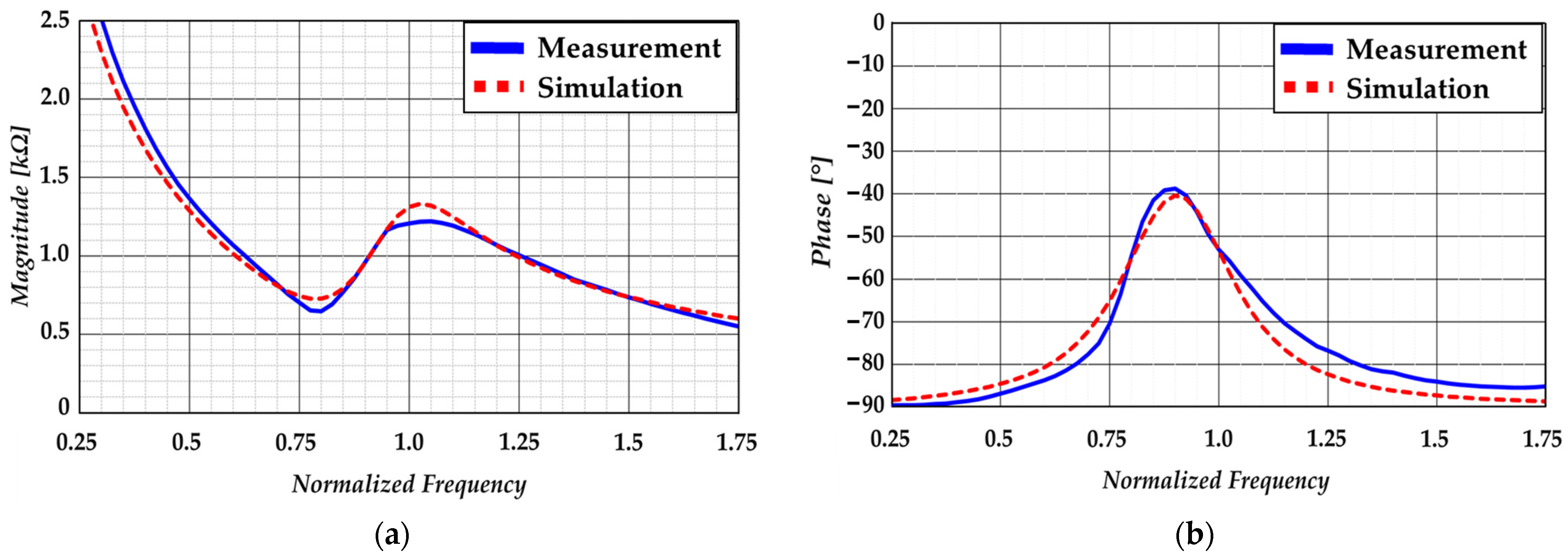
3.3.3. Experimental Results
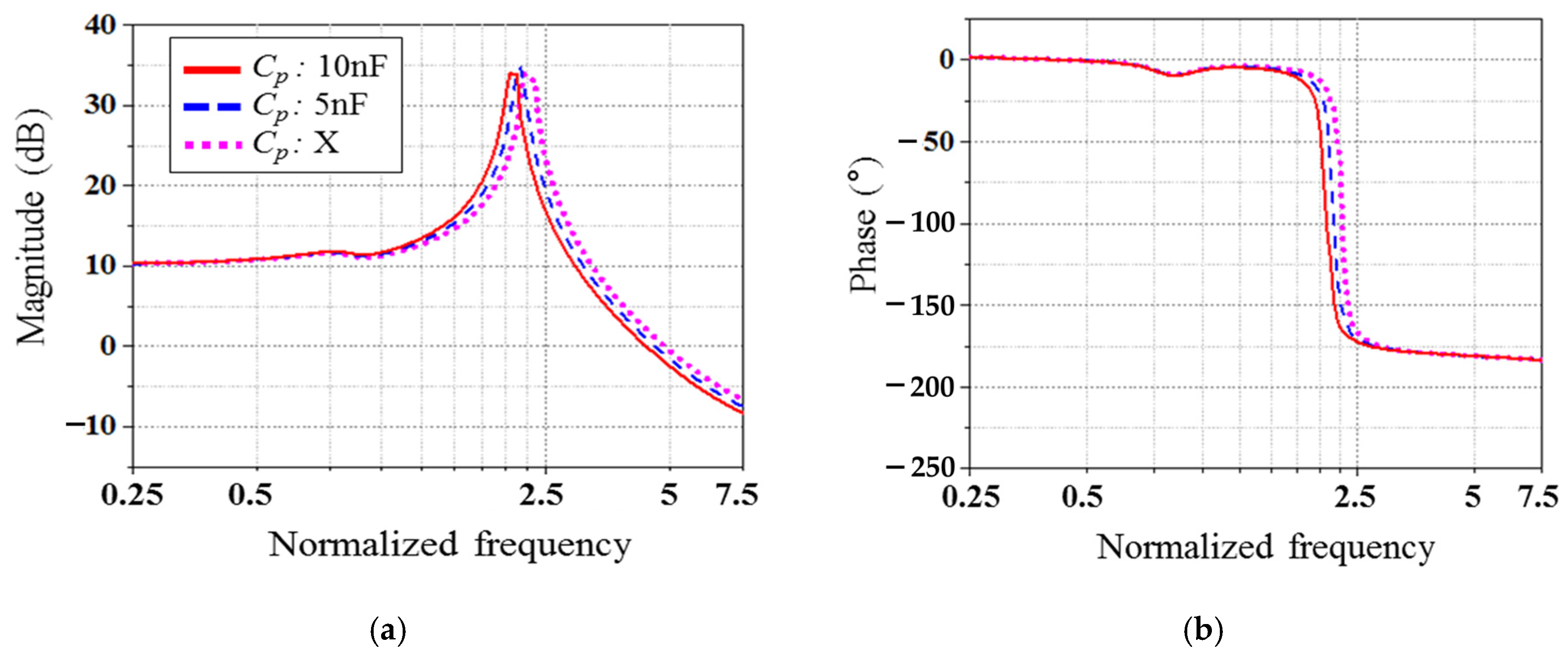
3.4. The LC Filter Circuit
4. The control of the Sonar Transmitter
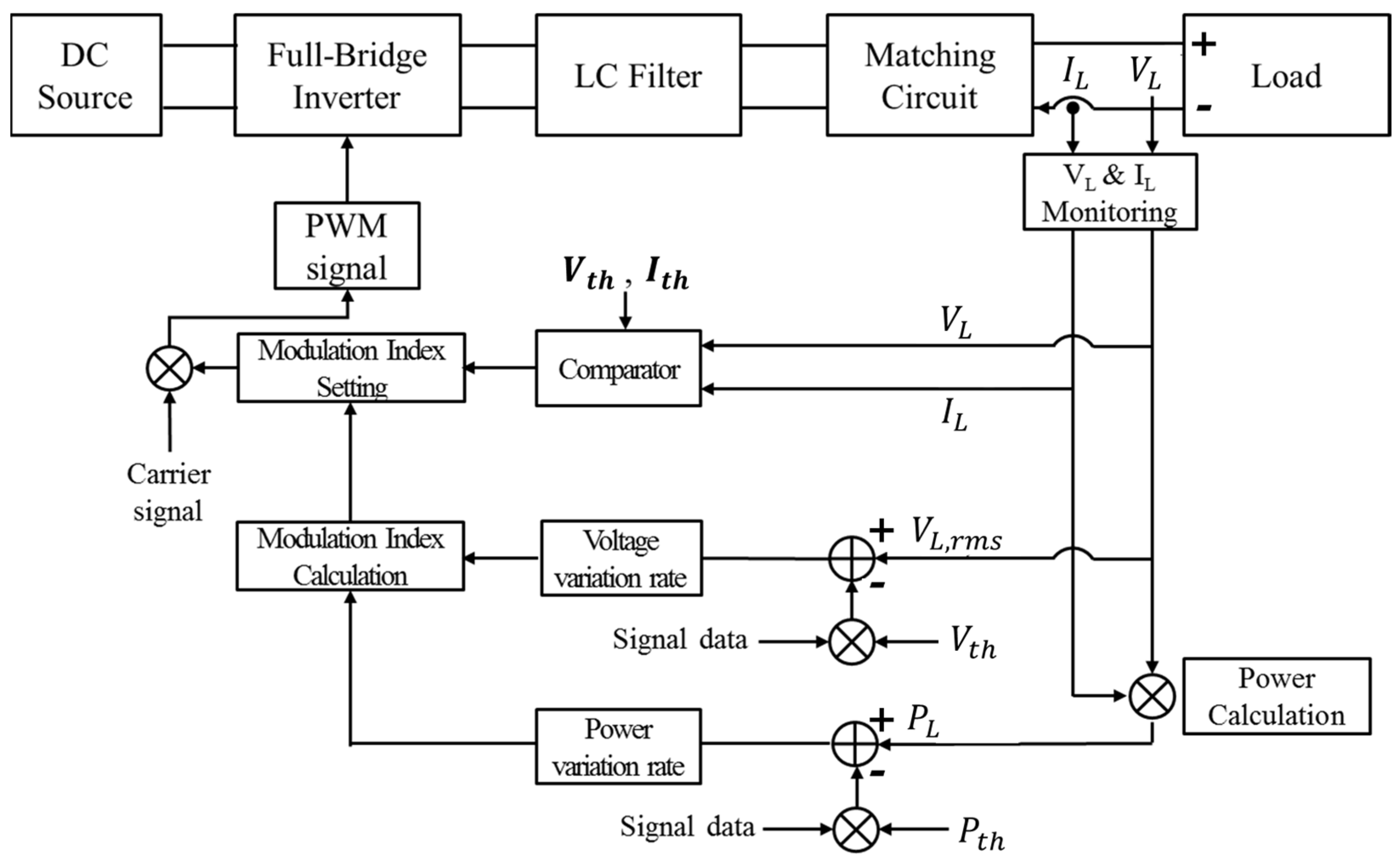
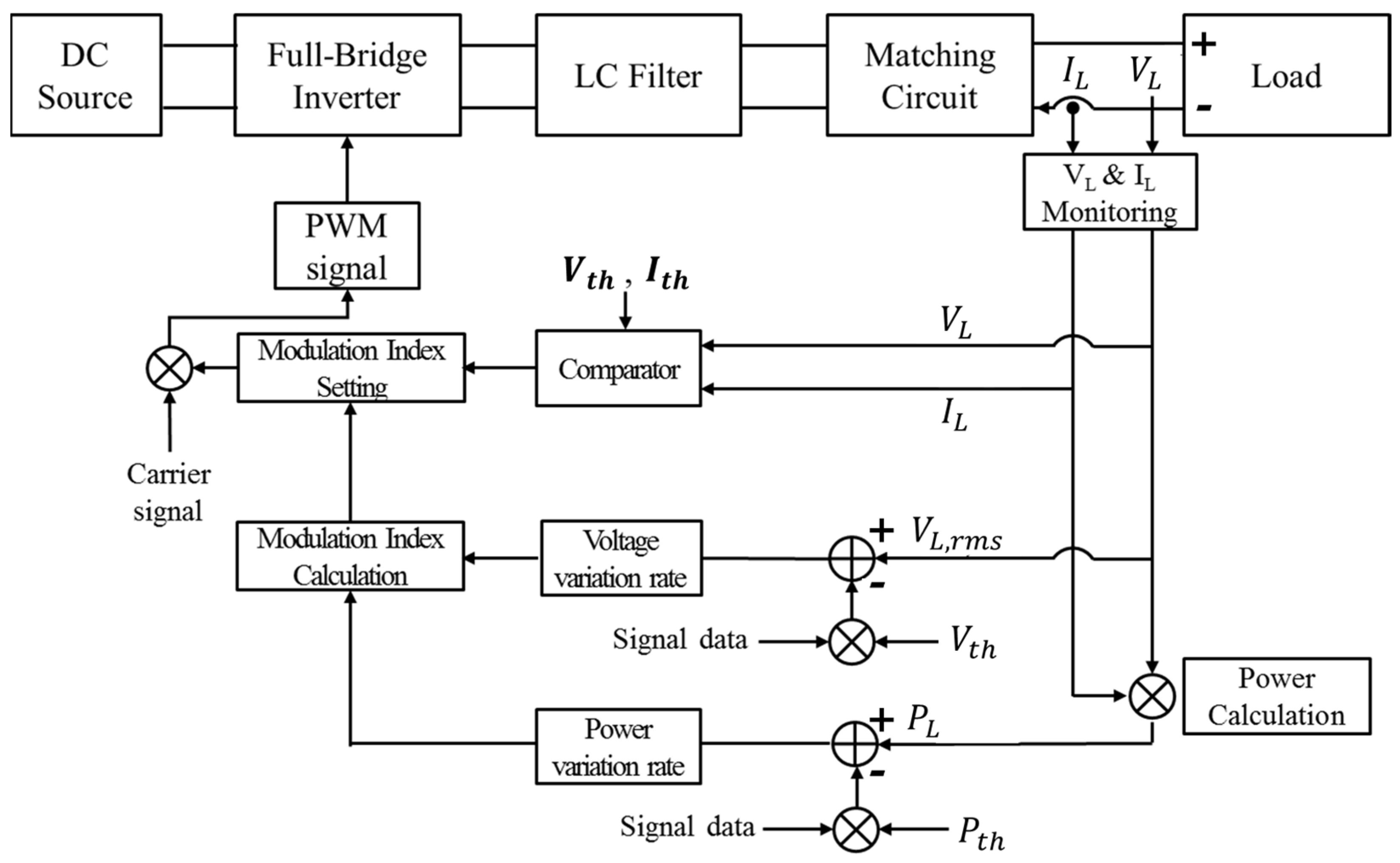
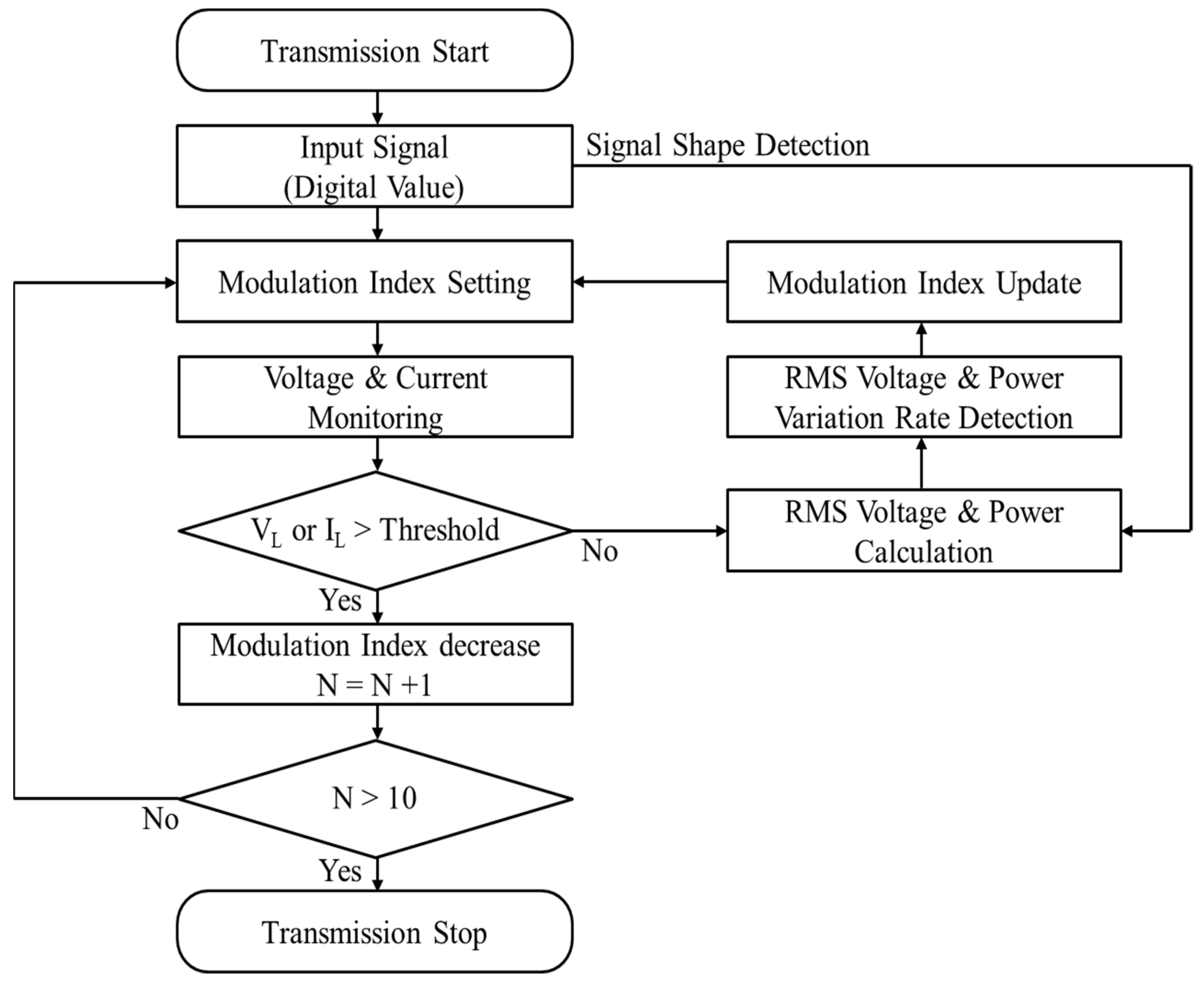
4.1. The Control Method
- (1)
- Sets the input signal and detecting the signal shape in the time domain;
- (2)
- Defines the initial MI for PWM control;
- (3)
- Detects the output voltage and current from the monitoring circuit;
- (4)
- If the output voltage and current values are below the threshold, calculates the RMS power and RMS voltage per single pulse period, and then updates the MI by adding the MI variation (delta MI) to the previous MI;
- (5)
- If the output voltage and current instantly exceed the threshold, reduces the MI by 0.2 per single pulse period (if this operation is performed more than 10 times, the transmitting signal will be blocked for protection of the transmitter).
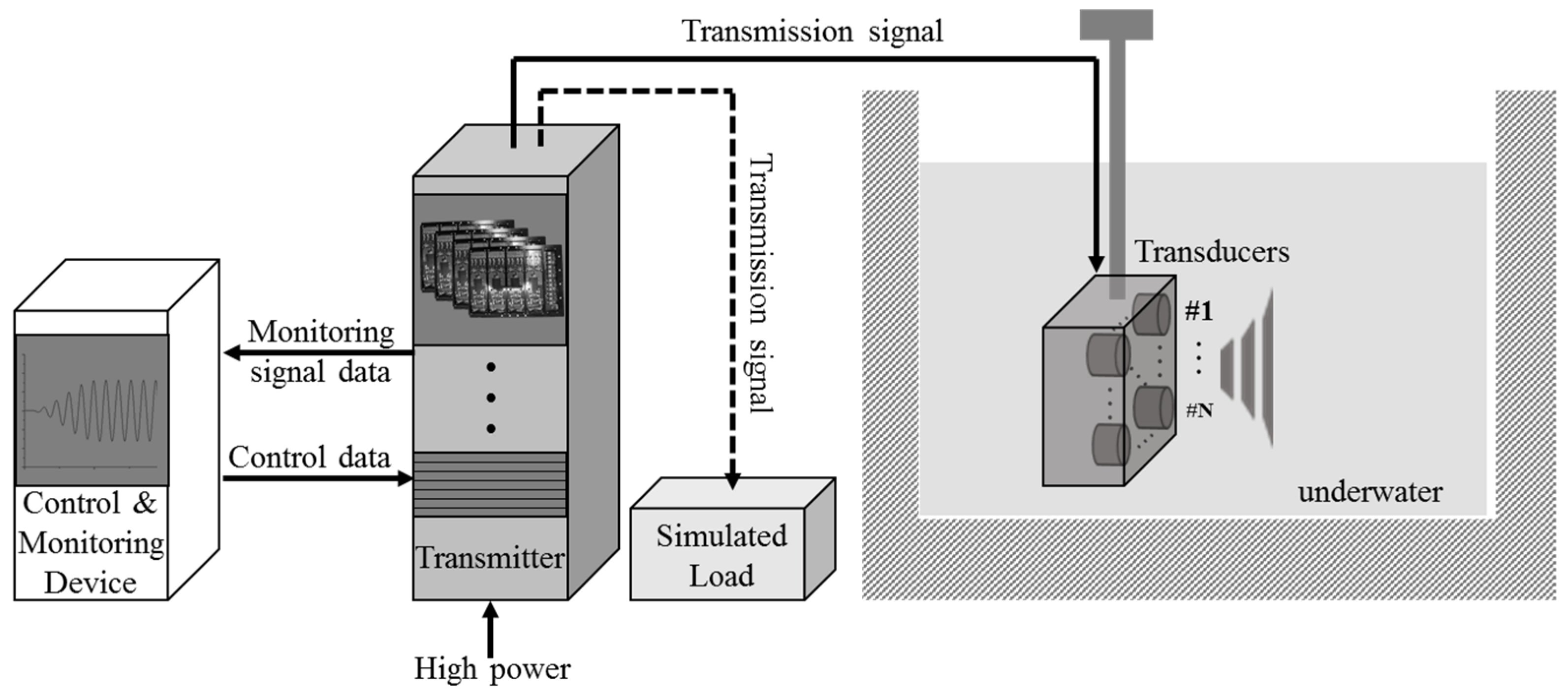
4.2. The Experimental Setup
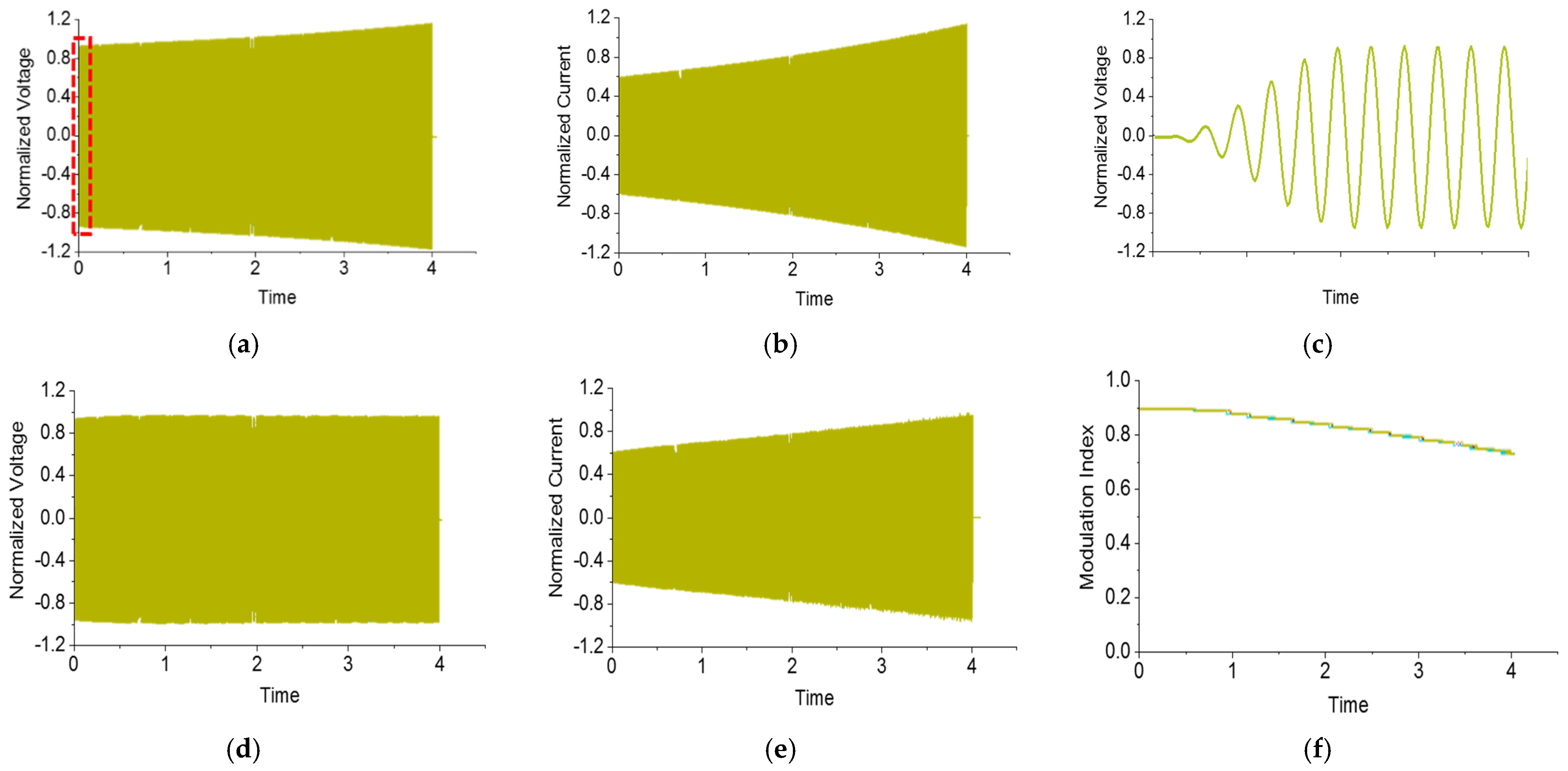
4.3. Results
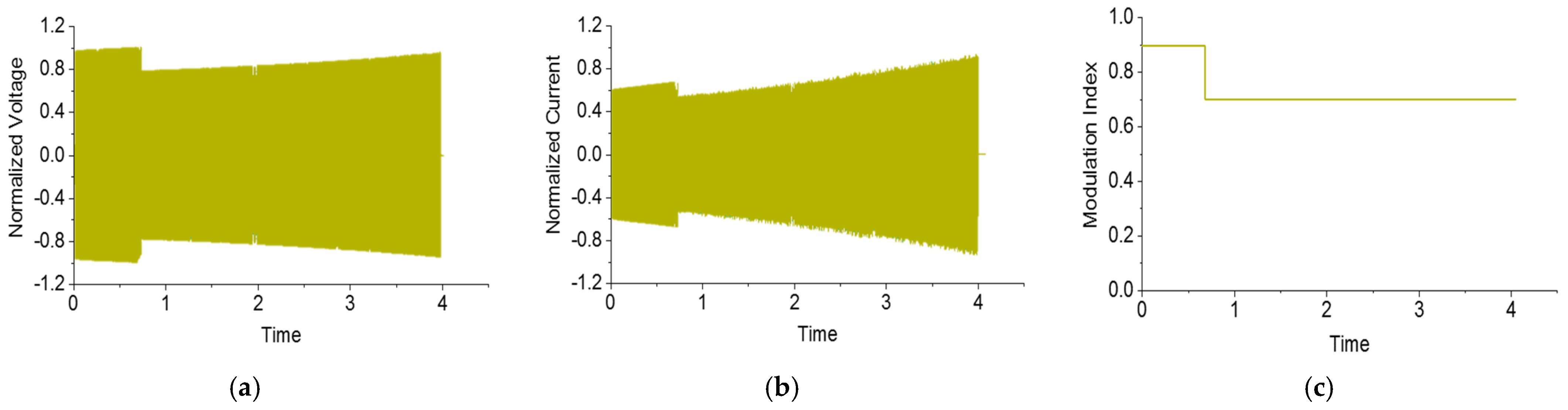
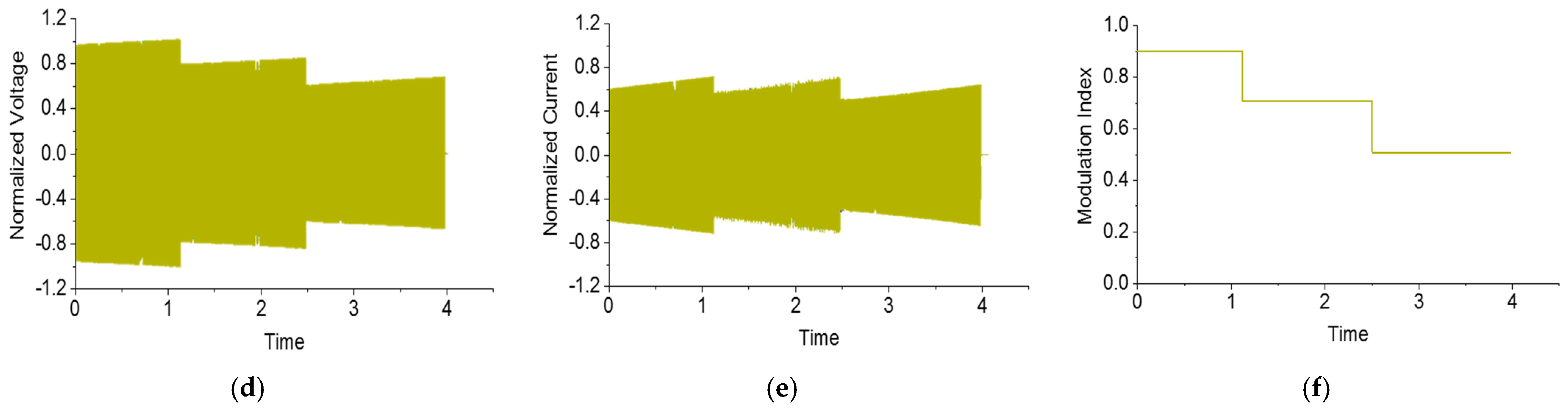
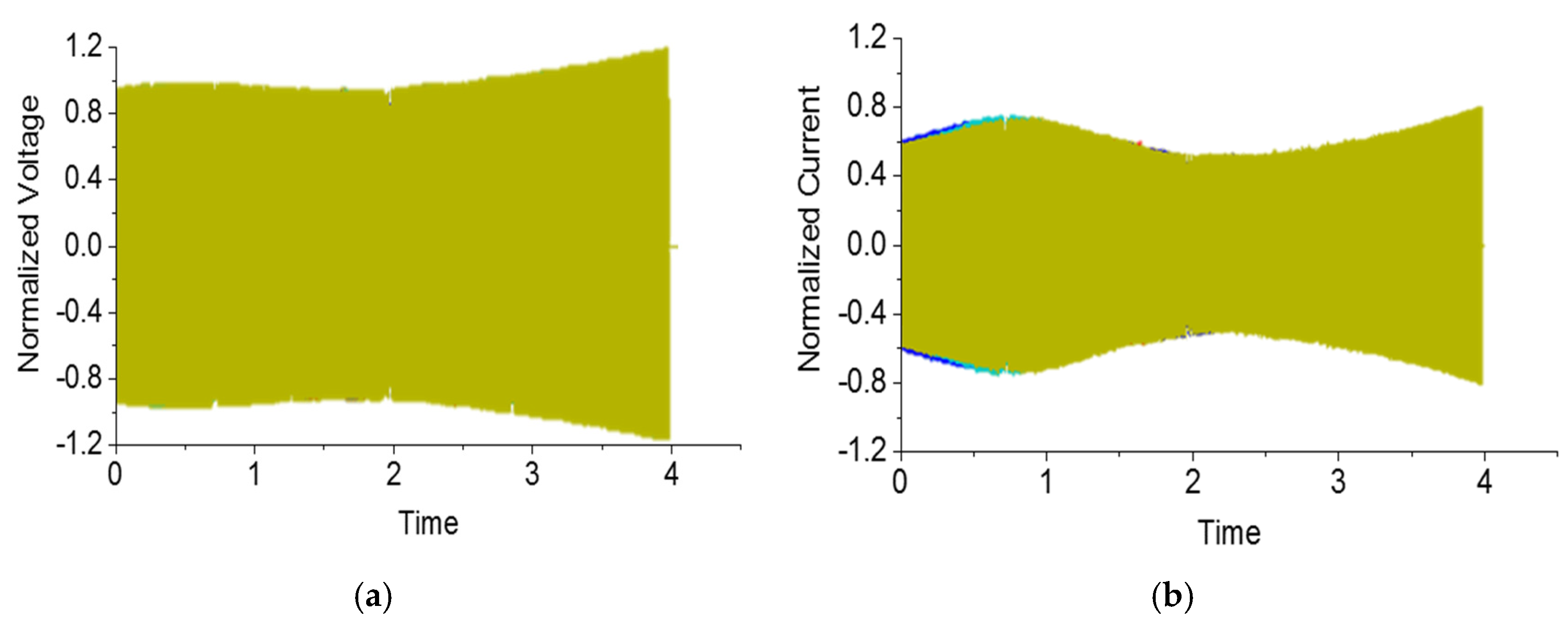
4.3.1. The Experiment Using the Simulated Load
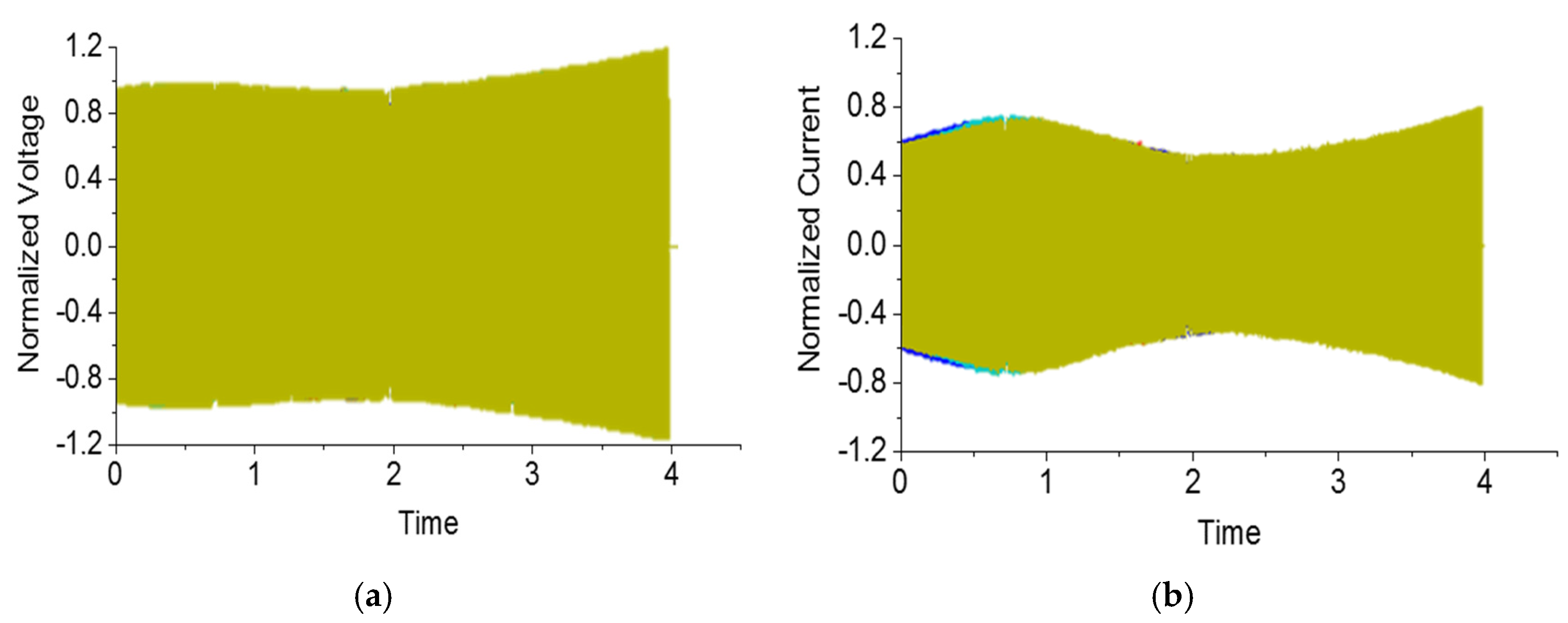
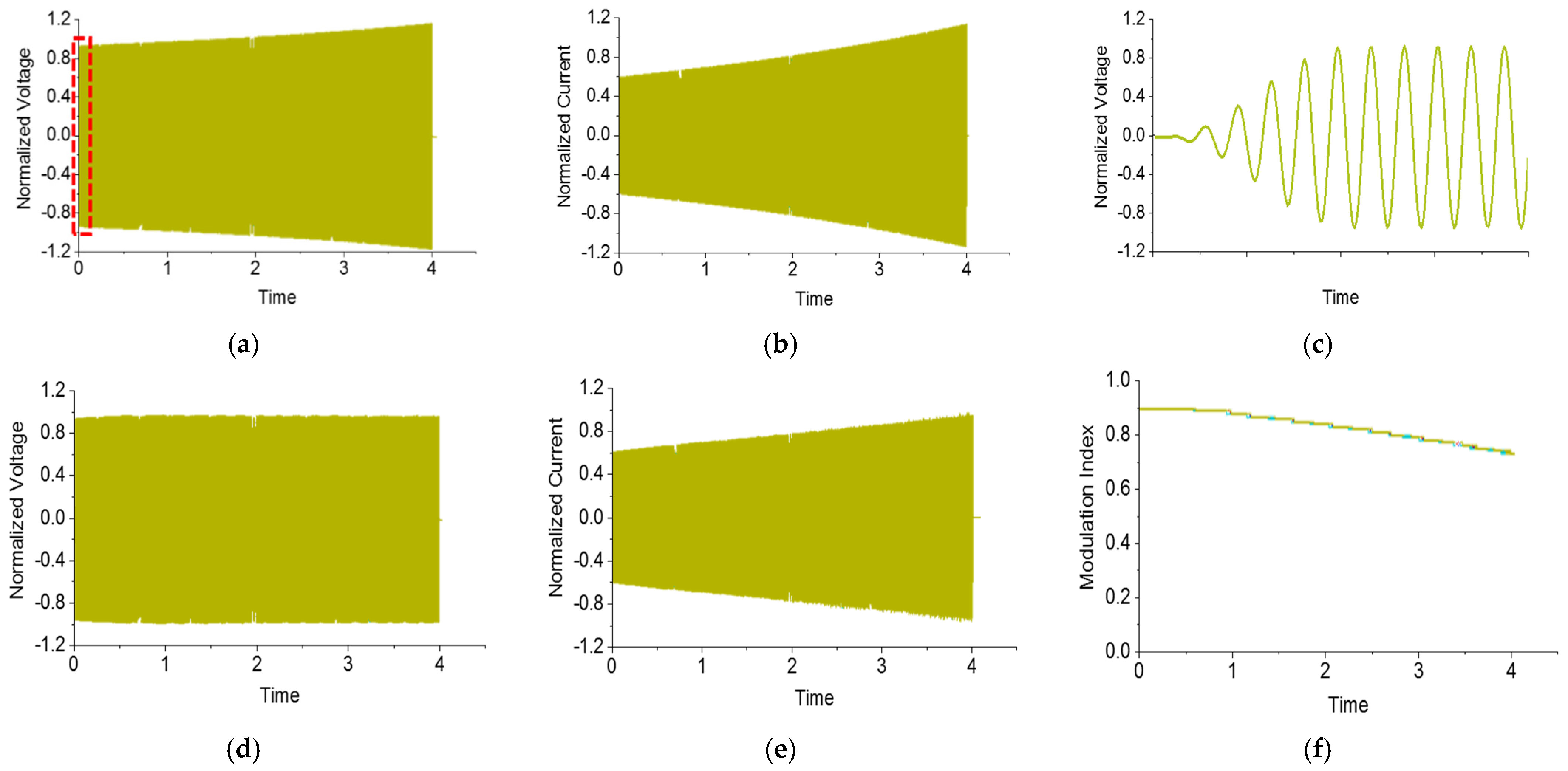
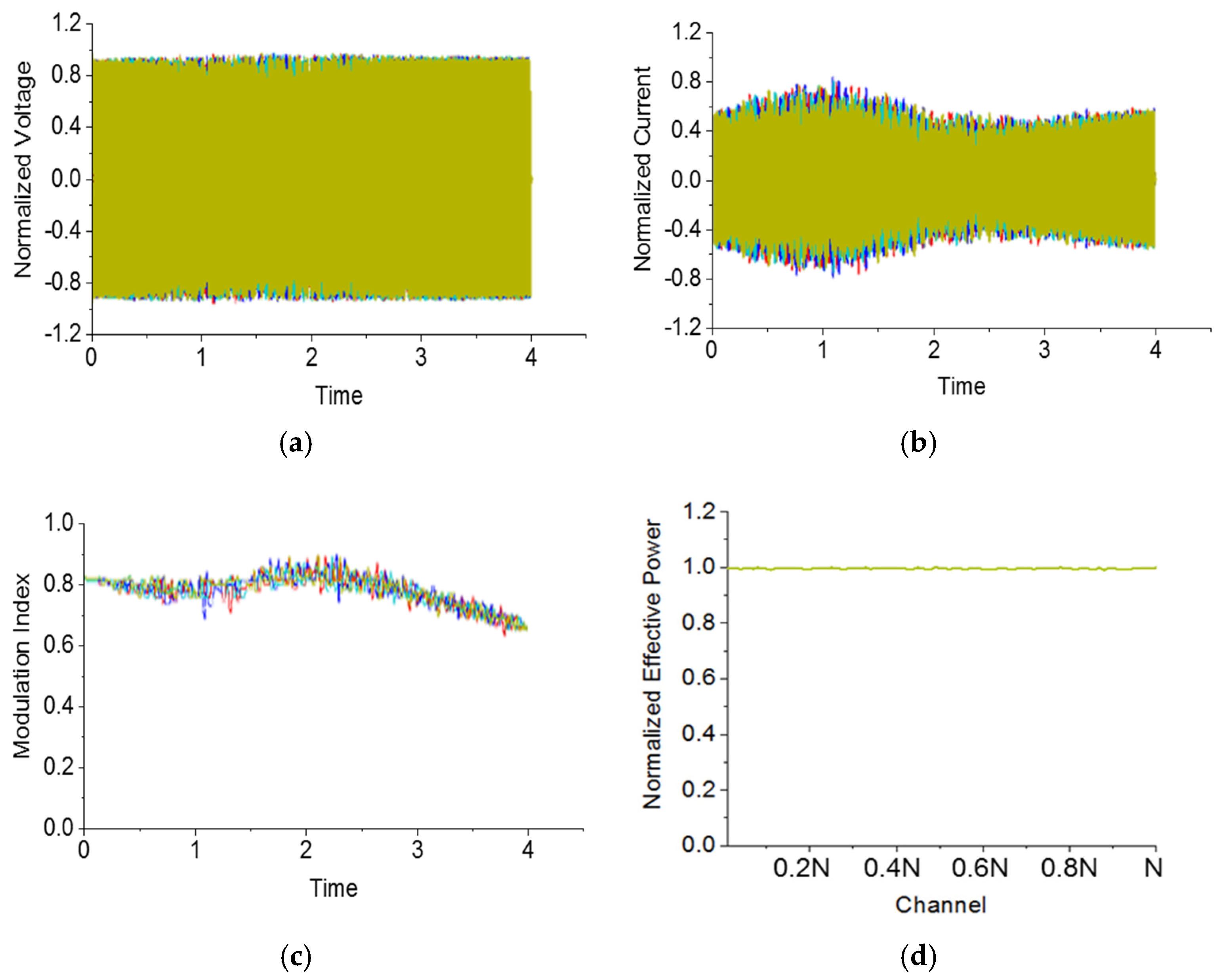
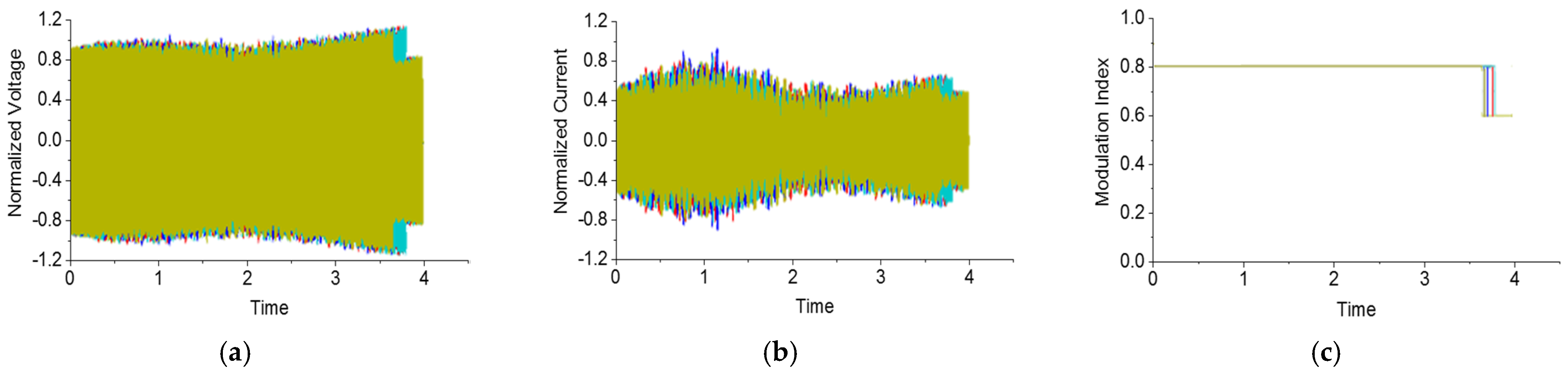
4.3.2. The Experiment Using a Multichannel Acoustic Transducer Load
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, J.-D.; Jiang, J.-J.; Duan, F.-J.; Zhang, F.-M.; Liu, W.; Qu, X.-H. A Novel Fast Resonance Frequency Tracking Method Based on the Admittance Circle for Ultrasonic Transducers. IEEE Trans. Ind. Electron. 2019, 67, 6864–6873. [Google Scholar] [CrossRef]
- Wang, J.-D.; Jiang, J.-J.; Duan, F.-J.; Cheng, S.-Y.; Peng, C.-X.; Liu, W.; Qu, X.-H. A High-Tolerance Matching Method Against Load Fluctuation for Ultrasonic Transducers. IEEE Trans. Power Electron. 2019, 35, 1147–1155. [Google Scholar] [CrossRef]
- Song, S.-M.; Kim, I.-D.; Lee, B.-H.; Lee, J.-M. Design of Matching Circuit Transformer for High-Power Transmitter of Active Sonar. J. Electr. Eng. Technol. 2020, 15, 2145–2155. [Google Scholar] [CrossRef]
- Rathod, V.T. A Review of Electric Impedance Matching Techniques for Piezoelectric Sensors, Actuators and Transducers. Electronics 2019, 8, 169. [Google Scholar] [CrossRef] [Green Version]
- Shen, J.; Luo, J.; Fu, S.; Su, R.; Wang, W.; Zeng, F.; Song, C.; Pan, F. 3D Layout of Interdigital Transducers for High Frequency Surface Acoustic Wave Devices. IEEE Access 2020, 8, 123262–123271. [Google Scholar] [CrossRef]
- Kobayashi, S.; Kondoh, J. Feasibility Study on Shear Horizontal Surface Acoustic Wave Sensors for Engine Oil Evaluation. Sensors 2020, 20, 2184. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Crupi, G.; Gugliandolo, G.; Campobello, G.; Donato, N. Measurement-Based Extraction and Analysis of a Temperature-Dependent Equivalent-Circuit Model for a SAW Resonator: From Room Down to Cryogenic Temperatures. IEEE Sens. J. 2021, 21, 12202–12211. [Google Scholar] [CrossRef]
- Bybi, A.; Mouhat, O.; Garoum, M.; Drissi, H.; Grondel, S. One-dimensional equivalent circuit for ultrasonic transducer arrays. Appl. Acoust. 2019, 156, 246–257. [Google Scholar] [CrossRef]
- Peng, X.; Hu, L.; Liu, W.; Fu, X. Model-Based Analysis and Regulating Approach of Air-Coupled Transducers with Spurious Resonance. Sensors 2020, 20, 6184. [Google Scholar] [CrossRef]
- Agbossou, K.; Dion, J.-L.; Carignan, S.; Abdelkrim, M.; Cheriti, A. Class D amplifier for a power piezoelectric load. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2000, 47, 1036–1041. [Google Scholar] [CrossRef]
- Ju, B.; Shao, W.; Zhang, L.; Wang, H.; Feng, Z. Piezoelectric ceramic acting as inductor for capacitive compensation in piezoelectric transformer. IET Power Electron. 2015, 8, 2009–2015. [Google Scholar] [CrossRef]
- Huang, H.; Paramo, D. Broadband electrical impedance matching for piezoelectric ultrasound transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2011, 58, 2699–2707. [Google Scholar] [CrossRef]
- Cheng, H.-L.; Cheng, C.-A.; Fang, C.-C.; Yen, H.-C. Single-Switch High-Power-Factor Inverter Driving Piezoelectric Ceramic Transducer for Ultrasonic Cleaner. IEEE Trans. Ind. Electron. 2010, 58, 2898–2905. [Google Scholar] [CrossRef]
- Lin, S.; Xu, J. Effect of the Matching Circuit on the Electromechanical Characteristics of Sandwiched Piezoelectric Transducers. Sensors 2017, 17, 329. [Google Scholar] [CrossRef]
- Rathod, V.T. A Review of Acoustic Impedance Matching Techniques for Piezoelectric Sensors and Transducers. Sensors 2020, 20, 4051. [Google Scholar] [CrossRef]
- Panchalai, V.N.; Chacko, B.P.; Sivakumar, N. Digitally controlled power amplifier for underwater electro acoustic transducers. In Proceedings of the 2016 3rd International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 11–12 February 2016; pp. 306–311. [Google Scholar]
- Choi, J.-H.; Lee, D.-H.; Mok, H.-S. Discontinuous PWM Techniques of Three-Leg Two-Phase Voltage Source Inverter for Sonar System. IEEE Access 2020, 8, 199864–199881. [Google Scholar] [CrossRef]
- Chacko, B.P.; Panchalai, V.N.; Sivakumar, N. Multilevel digital sonar power amplifier with modified unipolar SPWM. In Proceedings of the 2015 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Kochi, India, 10–13 August 2015; pp. 121–125. [Google Scholar]
- Cheng, L.-C.; Kang, Y.-C.; Chen, C.-L. A Resonance-Frequency-Tracing Method for a Current-Fed Piezoelectric Transducer. IEEE Trans. Ind. Electron. 2014, 61, 6031–6040. [Google Scholar] [CrossRef]
- An, J.; Song, K.; Zhang, S.; Yang, J.; Cao, P. Design of a Broadband Electrical Impedance Matching Network for Piezoelectric Ultrasound Transducers Based on a Genetic Algorithm. Sensors 2014, 14, 6828–6843. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Choi, J.-H.; Mok, H.-S. Simultaneous Design of Low-Pass Filter with Impedance Matching Transformer for SONAR Transducer Using Particle Swarm Optimization. Energies 2019, 12, 4646. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Ji, S.; Gu, S.; Huang, X.; Palmer, J.E.; Giewont, W.; Wang, F.F.; Tolbert, L.M. Design Considerations for High-Voltage Insulated Gate Drive Power Supply for 10-kV SiC MOSFET Applied in Medium-Voltage Converter. IEEE Trans. Ind. Electron. 2021, 68, 5712–5724. [Google Scholar] [CrossRef]
- Kim, J.Y.; Kim, I.D.; Moon, W.K. New high-efficiency power amplifier system for high-directional piezoelectric transducer. Trans. Korean Inst. Electr. Eng. 2018, 67, 383–390. [Google Scholar]
- Lee, H.J.; Zhang, S.; Bar-Cohen, Y.; Sherrit, S. High Temperature, High Power Piezoelectric Composite Transducers. Sensors 2014, 14, 14526–14552. [Google Scholar] [CrossRef] [Green Version]
- Luo, J.-A.; Zhang, X.-P.; Wang, Z.; Lai, X.-P. On the Accuracy of Passive Source Localization Using Acoustic Sensor Array Networks. IEEE Sens. J. 2017, 17, 1795–1809. [Google Scholar] [CrossRef]
- Xia, H.; Yang, K.; Ma, Y.; Wang, Y.; Liu, Y. Noise Reduction Method for Acoustic Sensor Arrays in Underwater Noise. IEEE Sens. J. 2016, 16, 8972–8981. [Google Scholar] [CrossRef]
- Paeng, D.G.; Bok, T.H.; Lee, J.K. Computation of the mutual radiation impedance in the acoustic transducer array: A literature survey. J. Acoust. Soc. Korea 2009, 28, 51–59. [Google Scholar]
- Lee, H.; Tak, J.; Moon, W.; Lim, G. Effects of mutual impedance on the radiation characteristics of transducer arrays. J. Acoust. Soc. Am. 2004, 115, 666–679. [Google Scholar] [CrossRef]
- Wallenhauer, C.; Gottlieb, B.; Zeichfusl, R.; Kappel, A. Efficiency-Improved High-Voltage Analog Power Amplifier for Driving Piezoelectric Actuators. IEEE Trans. Circuits Syst. I Regul. Pap. 2010, 57, 291–298. [Google Scholar] [CrossRef]
- Lee, B.-H.; Lee, J.-M.; Baek, J.-E.; Sim, J.-Y. An Estimation Method of an Electrical Equivalent Circuit Considering Acoustic Radiation Efficiency for a Multiple Resonant Transducer. Electronics 2021, 10, 2416. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | C0 (nF) | R1 (Ω) | L1 (mH) | C1 (nF) |
|---|---|---|---|---|
| Air | 42.0 | 147.8 | Lair | 12.3 |
| Underwater | 42.0 | 1124.8 | Lwater | 12.3 |
| Symbol | Description |
|---|---|
| Estimated impedance of the equivalent circuit model, including the matching circuit | |
| Conductance term of the equivalent circuit model | |
| Susceptance term of the equivalent circuit model | |
| Starting frequency (data sample) of the impedance matching for the equivalent circuit model | |
| Resonance frequency for the mechanical–acoustical branch of the equivalent circuit | |
| Ratio of the primary and secondary turns of the matching transformer | |
| Magnetizing inductance of the matching transformer | |
| Primary leakage inductance of the matching transformer | |
| Secondary leakage inductance of the matching transformer |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, B.-H.; Baek, J.-E.; Kim, D.-W.; Lee, J.-M.; Sim, J.-Y. Optimized Design of a Sonar Transmitter for the High-Power Control of Multichannel Acoustic Transducers. Electronics 2021, 10, 2682. https://doi.org/10.3390/electronics10212682
Lee B-H, Baek J-E, Kim D-W, Lee J-M, Sim J-Y. Optimized Design of a Sonar Transmitter for the High-Power Control of Multichannel Acoustic Transducers. Electronics. 2021; 10(21):2682. https://doi.org/10.3390/electronics10212682
Chicago/Turabian StyleLee, Byung-Hwa, Ji-Eun Baek, Dong-Wook Kim, Jeong-Min Lee, and Jae-Yoon Sim. 2021. "Optimized Design of a Sonar Transmitter for the High-Power Control of Multichannel Acoustic Transducers" Electronics 10, no. 21: 2682. https://doi.org/10.3390/electronics10212682
APA StyleLee, B.-H., Baek, J.-E., Kim, D.-W., Lee, J.-M., & Sim, J.-Y. (2021). Optimized Design of a Sonar Transmitter for the High-Power Control of Multichannel Acoustic Transducers. Electronics, 10(21), 2682. https://doi.org/10.3390/electronics10212682