1. Introduction
Cyber Physical Systems (CPSs) emerge from the attempts to unify the emerging applications of embedded computers and communication technologies used to monitor, control, as well as generate actions on physical elements to fulfill with a specific task [
1], and they have an important impact on different sectors [
2].
The different parts of the system are usually interconnected using communication networks to share information and data that interact with each other and, sometimes, cloud computing services [
3,
4,
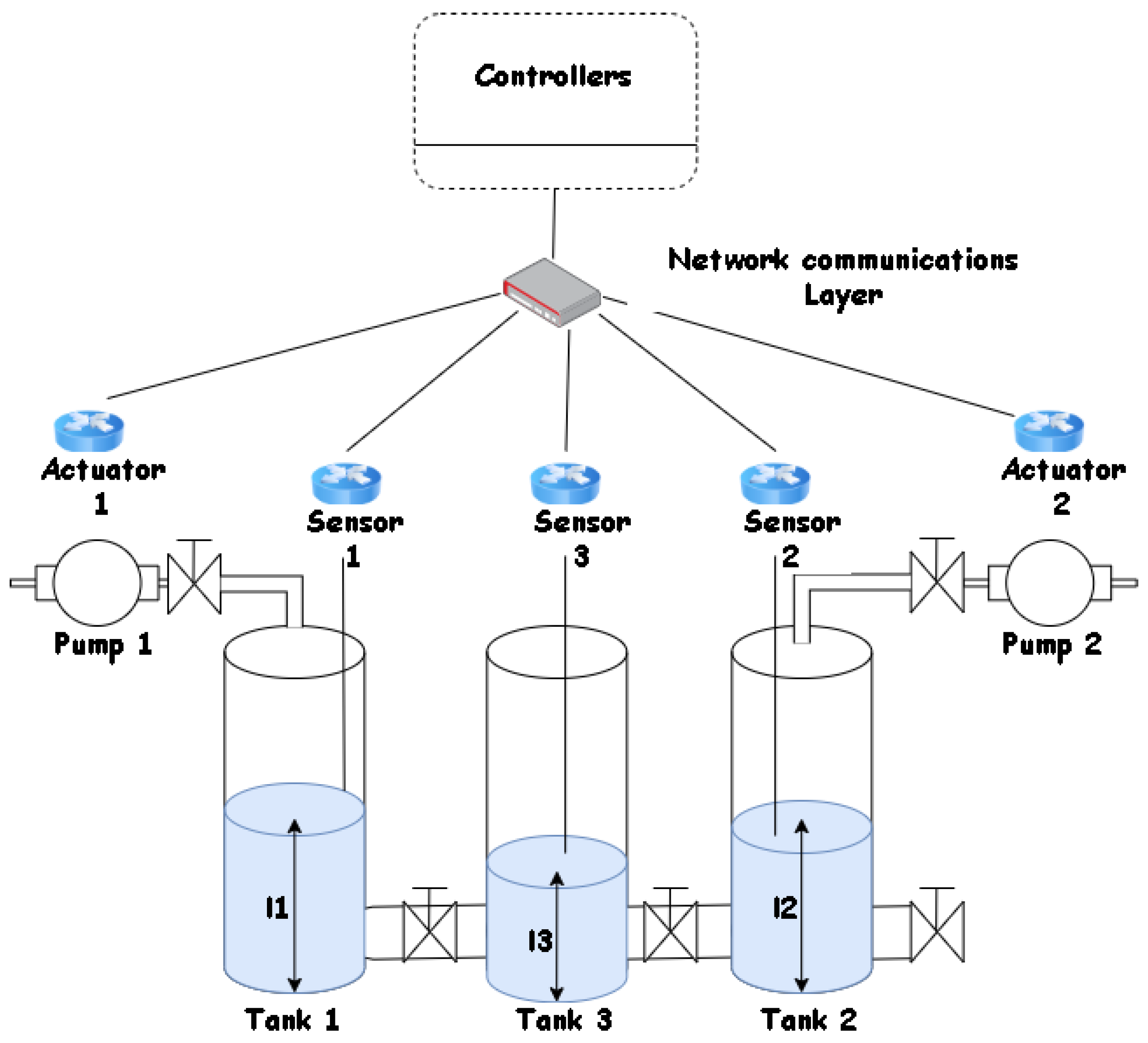
5]. CPSs can be represented in layers, as shown in
Figure 1. The first is the physical layer, where the physical infrastructure of the system, sensors, and actuators are located, with the objective of monitoring and controlling physical processes. The second is the network layer, which implements the transmission data and allows the interaction between the physical layer and the cybernetic layer. Finally, a cybernetic layer allows the abstractions of the received data, as well as the interaction between networks, devices, and the physical infrastructure [
6].
Society currently relies on multiple automatic systems supported by CPSs. These applications are focused in contexts, such as industrial, health, and environmental, among others [
7,
8]. Security and reliability are fundamental requirements in these systems. Cyber attacks can generate inappropriate behaviors and catastrophic impacts on the physical world, causing damage to both the system infrastructure and industrial products and even threaten human lives [
9]. Examples, such as attacks on smart grids, aviation systems, water plants, chemical plants, and oil and natural gas distribution systems, are becoming increasingly high [
10,
11,
12,
13,
14]. The above has caused this research area to be active in recent years.
Therefore, there must be mechanisms to detect the occurrence anomalies to avoid exploiting vulnerabilities in the devices connected to the system network. Real-time detection is very important in order to ensure reliability and security in these systems, where sensors are prone to malicious attacks. For this reason, detection systems are often used, such as Intrusion Detection Systems (IDS), which monitor data traffic to identify and protect systems from these eventualities. Based on detailed analysis of network traffic and device usage, IDSs seek to evaluate this information to identify unwanted events. IDSs do this by carrying out three stages: monitoring, analysis, and detection. Monitoring relies on a sensor network or host-based sensors, the analysis stage is based on any method to identify and extract features, and the detection stage relies on anomaly detection [
15,
16].
Within these can be highlighted: [
17] the methods based on traditional information technologies, where network traffic analysis is used to detect anomalies [
18,
19,
20,
21,
22,
23,
24,
25,
26]; and model-based methods, where detection is performed by comparing the system actual output with an expected value [
4,
27,
28,
29,
30,
31].
According to reference [
16,
32], host-based IDS methods operate on the data collected from the individual parts of the computer systems and can detect internal changes and determine which processes and/or users are involved in malicious activities, which can be not significant with some devices; thus, this method sometimes fails. Whereas a network-based IDS will detect malicious packets as they enter your network or unusual behavior on your network, such as flooding attacks, more traditional IDS can do it on one channel or across the network. These monitor the entire network traffic to detect known or unknown attacks using techniques based on anomalies, signatures, and specifications [
16,
33,
34]. Hence, IDSs help to avoid critical consequences and assist in making appropriate decisions when system events occur by performing two main tasks: attack detection, which decides whether or not an anomaly has occurred; and attack isolation, which decides which elements of the system are being affected by the unwanted.
In such a way, the purpose of this research is to present the design of an architecture that allows detecting and isolating attacks that may occur between the elements of the physical layer and the controller, generating alerts that allow detection and localization of the origin of the cyber attacks. For this, a new architecture was proposed for the detection and isolation of attacks using techniques based on artificial intelligence. The proposal integrates two approaches: regression and classification. The first approach allows generating models that describe the behavior of the real process to estimate the outputs by using process input data, obtaining in this way the model to be compared with the real process values in order to detect and isolate the attack. The second approach allows generating detection systems to carry out the detection and isolation of attacks. The proposal was subjected to two test benches, obtaining better results than those reported in previous works. The contributions of this paper are as follows:
The design of an architecture using one-dimensional convolutional neural networks to detect and isolate cyber-attacks that involve the elements of the physical layer and the controller of a CPS, generating alerts to detect and locate the origin of the cyber attack.
The architecture proposed is an architecture based on the process information, where the dynamic properties of the process are covered, in order to evaluate the possibility of a cyber attack occurring in different parts of the system, without the need to define a threshold that allows separating normal situations with events where a cyber attack is possibly occurring.
The design of the architecture allows detecting and locating the occurrence of cyber attacks occurring simultaneously in different parts of the system, even when the attacks are of different types.
The remaining sections are structure as follows.
Section 2 presents related works.
Section 3 describes the problem statement. In
Section 4, the attack detection and isolation method is proposed.
Section 5 exposes the results obtained using the method proposed in two test benches. Finally, in the last section, we present the conclusions.
2. Related Works
Protection systems in industrial processes have used strategies that have presented good performance in other environments, such as office environments. However, the characteristics of these applications are not the same, so the results obtained are not as expected. This is because the availability of equipment in industrial systems is very high; so, in many cases, a simple solution in corporate environments, such as patching, simply does not work because the machine is not available to shut down until a planned outage. It is also difficult to predict how a newly introduced patch will affect the operation of a control system, especially if the patch is not rigorously tested, increasing the organization’s reluctance to act on potential threats. The implementation of security patches can affect application performance and, therefore, the stability, availability, and real-time behavior of machines. Something equivalent occurs with the impact on data traffic through the communications network associated with solutions that evaluate network traffic, which can affect delays in control strategies and, in turn, the performance of control loops [
35]. This problem has motivated different projects with the purpose of contributing from different approaches to increase the security of control systems. In this section, the related works are described.
Some ongoing projects to improve security in these systems have included methods to provide aspects, such as data confidentiality and authentication, access control, within the network, and privacy and reliability of applications, as well as the inclusion of security and privacy policies [
36]. Even so, CPSs are vulnerable to multiple attacks aimed at disrupting the network and modifying process variables, altering its operation. For this reason, new defense mechanisms designed to detect cyber attacks have been generated. One of the best known mechanisms is IDS. IDS approaches may be classified as signature-based, anomaly-based, or specification-based [
33].
The signature-based method only detects records that are inside of a database, and it is highly accurate and effective against known threats, consumes more power, and does not detect new events [
33]. The anomaly-based method is efficient in detecting new attacks [
16] since it compares the system activities in a moment against an usual behavior profile and generates alerts whenever a threshold defined by the system’s normal behavior is cross [
34]. However, anything that does not match normal behavior is considered an intrusion, and learning all normal behavior is not an easy task. Therefore, this method generally has high false-positive rates. On the other hand, the methods based on specifications use a set of rules and thresholds that define the expected behavior of the different components of the network. It has the same purpose as anomaly-based methods, with the difference that this method is specified manually by an expert who determines the specifications. Manually defined specifications typically provide low false-positive rates versus anomaly-based detection and do not require training steps because it can be used immediately. However, these methods cannot be adapted to different environments and can be time-consuming to adjust and error-prone [
33].
Other authors have developed state observers for detection, such as the Luenberger Observer (LO), while the isolation process is realized by structured residues generated using Unknown Input Observers (UIOs) [
37,
38,
39,
40]. These methods present drawbacks because the detection of anomalies is realized by a comparison of a fixed threshold defined by a historical data of normal behavior, with the difference between the variables of the actual process and the values generated by an estimated model. Then, it can lead to a considerable rate of false positives and false negatives. The above is because, for the design of the observer banks, the knowledge of the parameters and the dynamics of the system is used, which sometimes can be significantly different of the real system performance. So, both proposals are limited by the knowledge of the process, such as the definition of the threshold, which, in real situations, it may not be easy to model accurately.
In the last few years, data-driven methods have been employed to detect cyber attacks [
18,
19,
20,
21,
22,
23,
25,
41]. These methods have presented good performance to find models of processes that even present quite pronounced non-linear dynamics. Machine learning technology is one of the data-driven methods emerging as a method to detect attacks in these systems [
23,
26,
42,
43,
44,
45,
46,
47,
48,
49,
50].
Random Forest-based algorithms have been employed recently to detect malicious behavior by using databases; in this case, binary classification is applied to classify whether the content of a packet is malicious or not. This method reduces computational cost but does not guarantee high accuracy [
51]. In this way, it is not possible to identify which task transmitted the packet, and it does not allow specifying the type of attack [
15,
16]. From another point of view, in Reference [
52], a scheme was proposed to protect remote patient monitoring systems against DoS attacks. An attack detection model was established by developing mechanical learning using decision trees. The model could help to locate various types of attacks, focusing mainly on flooding attacks, and could be appropriate to devices with limited memory and processing resources, such as sensors and healthcare devices. As future work, they propose the possibility of identifying other types of attacks and even developing a mechanism to block a wide range of attacks.
Other approaches have used different artificial intelligence techniques, such as Support Vector Machines (SVMs), genetic algorithms [
32], self-organized networks of ant colonies, and extreme learning machines, which provide models with very high accuracies applied in the context of security in computer networks, and especially in the detection of intrusions. The purpose of these techniques is to achieve better intrusion recognition rates, but it is still noticeable that the false positive rate remains the problem to be approached in all these studies. Although some technique can reduce the false positive rate, it increases the training time and classification, which is a relevant index for real-time detection [
53].
In Reference [
18], an SVM-based algorithm was used to classify normal and abnormal behavior of data traffic that may be subjected to DoS attacks. This algorithm reaches good attacks predictions rate with less training time. In Reference [
19], a method based on Principal Component Analysis (PCA) and SVM to detect DoS attacks was presented. The paper analyzes the effects of DoS attacks in a network using TCP protocol. The PCA algorithm is used in order to filter the interference of the environment to extract the main features effectively and reduce the dimensioning of information without losing information from the original data. The results show that the algorithm has high accuracy and a low false positive and false negative rate (FPR and FNR). In the same context, an SVM using a radial basis kernel function is proposed in Reference [
20] to detect attacks in networked automotive systems. This proposal aims to avoid drawbacks associated with cases in which there is not an events dataset, or it is probably not sufficiently representative because many of the possible situations of a system are unknown. However, these techniques are not suitable for detecting mutations from various attacks.
Advanced techniques, such as Deep Belief Networks (DBN) and Deep Convolutional Neural Networks (Deep CNN) [
54,
55], are trained to extract low-dimensional features and are used to discriminate usual and hacking packets. In Reference [
56], an anomaly detector based on a neural network recurrent Long short-term memory (LSTM) was proposed to detect attacks with low false alarm rates. These methods have had the best response in these environments, although the computational costs sometimes are high [
20,
55]. Thus, applying machine learning and other artificial intelligent techniques is a challenge because it requires more memory and computational cost that can affect the performance of the system.
In addition, to validate the proposal, two test benches were used. For the selection of these datasets, a search was performed that included keywords, such as security in industrial control systems, detection of faults, anomalies and cyber attacks in control systems, and design of secure CPSs. From this search, we considered the publications that had a publication time of less than 5 years, as well as the number of times that the datasets had been used to evaluate the security on CPSs. We also considered the type of attacks that were implemented, since our approach was to address different types of attacks, including those with the highest frequency and impact on the control systems found in the CPSs (integrity and DoS attacks).
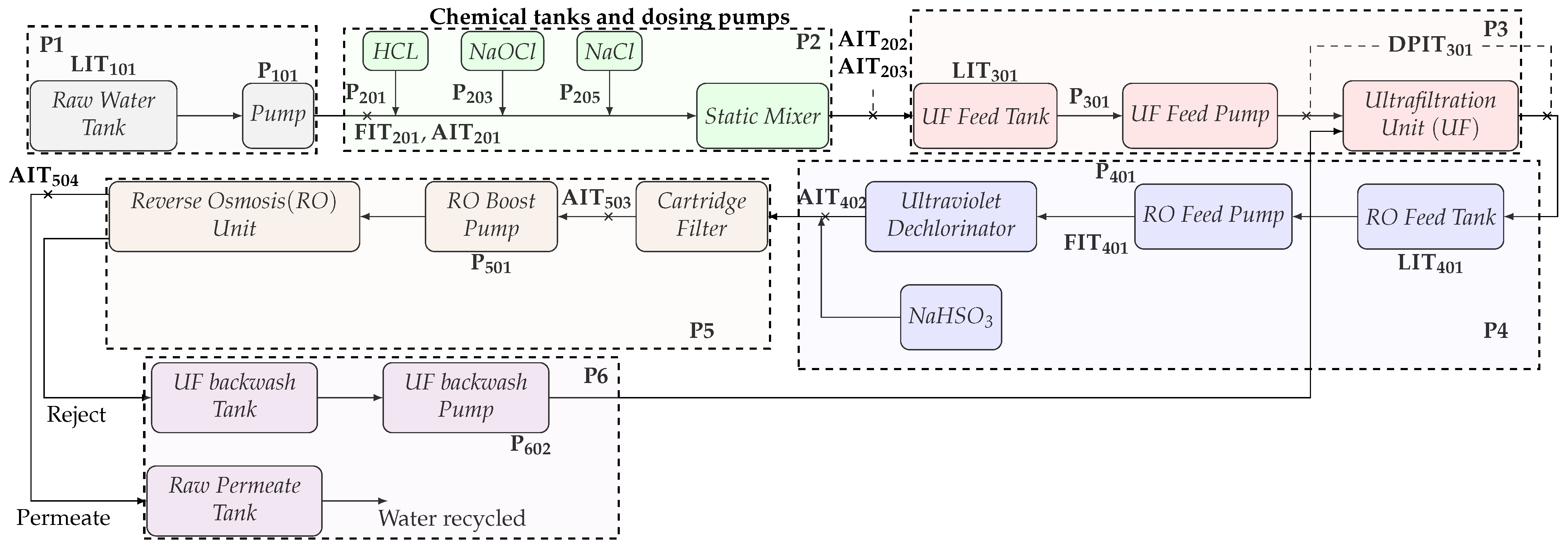
The first one corresponds to the SWaT dataset, which provides real data from a simplified version of a real world water treatment plant. This dataset allows researchers to design and evaluate defense mechanisms for CPSs and contains both network traffic and data concerning the physical properties of the system [
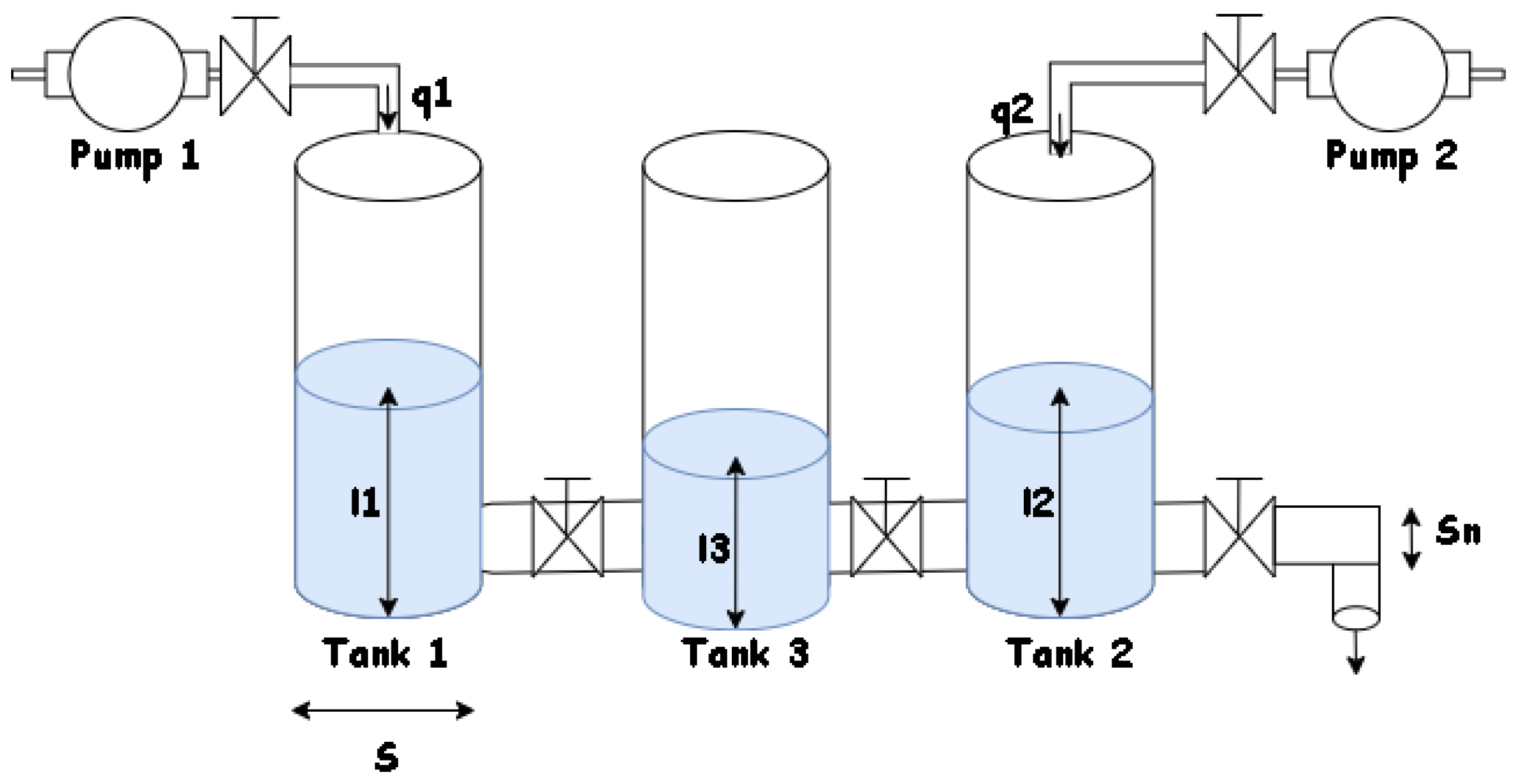
57]. On the other hand, there is another test bed which consists of three interconnected tanks [
58] that has allowed the validation of different types of detection methods for cyber attacks on CPS. These two test benches have made it possible to validate different proposals focused on techniques that allow us, in one way or another, to analyze the detection of cyber attacks [
37,
42,
59,
60,
61,
62,
63,
64,
65,
66,
67,
68,
69] and have made it possible to direct this research to improve the proposed proposals.
Based on this review,
Table 1 summarizes each of the related reports to a set of characteristics in order to highlight the issues that need to be addressed to improve the strategies and proposals in the future.
Based on the review of the related works, it became evident that there are still challenges concerning the detection of cyber attacks within the control systems found in the CPSs. On the one hand, methods must be sought to decrease both the false positive and false negative rates, and to increase the true positive and true negative rates. This will improve the overall performance of these detection systems. It is also evident that the phenomenon of simultaneous attacks has not been addressed in the design of cyber attack detection systems, which is worrying because these situations can occur very often in the real world. Is important to clarify that, within a CPS, there are many points where a cyber-attack can occur and that can cause different consequences in the system. The emphasis of this work seeks to design an architecture that allows detecting and locating attacks that occur between the elements of the physical layer and the controller of a CPS, precisely in attacks that modify or interrupt the sending of data from one element to another. In this way, this paper presents the design of an architecture that explores the potential of convolutional neural networks to extract features and, thus, to determine whether there is an event related to the possibility of a cyber attack occurring. This approach may have a closer approach to the implementation in real cases in which there is a high degree of uncertainty in the process models, since, on many occasions, the way to detect an anomaly or not is done under a process of comparison between estimated values and the real values of the process, which is subsequently evaluated by a threshold. In our proposal, this evaluation is carried out in an intrinsic way by the architecture based on convolutional neural networks, generating a better performance than current works, as well as shows promising results in the detection and isolation of simultaneous attacks.
3. Problem Statement
Several control applications supported in these systems can be labeled as safety critical in relation to the fulfillment of strict real time deadlines, associated with the generation of actions from the interaction between the computational systems and the physical systems related to the application, because the non-fulfillment of these requirements can cause irreparable damage to the physical system being controlled, as well as to the people depending on it [
70]. Additionally, measurements and control actions can be altered while being transmitted through communication networks, thus requiring new control algorithms or design architectures, which, in the presence of adverse situations, can bring the system to safe and stable states [
71,
72]. The proposal presented in this work focuses in the detection and isolation of DoS and integrity cyber attacks on CPSs, specifically on the exchange of information between sensors, actuators, and controllers. The approach realized is based in the fault detection and isolation systems for what anomalies are represented as a variation of the system parameters [
58]. Then, any control system where its control signals and/or measured variables are susceptible to be attacked can be modeled as a combination of the two models defined in (
1) and (
2).
where
represents the state vector,
,
is the output vector,
,
is the control action,
, matrix
A is the state matrix,
,
B is the input matrix,
,
C is the output matrix,
, D is the feedthrough matrix,
,
, and
.
and
, represent the effect of a multiplicative anomaly and an additive effect in the control action, respectively. DoS and integrity attacks are visible as anomalies on the control action. If the
i-th control action is attacked, then the matrix
corresponds to the
i-th column of the matrix
B, and
corresponds to the magnitude of the attack that directly affects the controller.
Similarly, if the i-th sensor is attacked, the matrix is the i-th row of the matrix C, and the vector of attacks is , which represents the magnitude of the effect produced in the i-th sensor.
The problem with traditional methods based on mathematical models that describe the behavior of the system is that these models are dispensable of the complete knowledge of the system parameters, and the adaptation in real conditions can cause the overall performance to decrease. Because of this, we intend to address this problem from models based on artificial neural networks, precisely in one-dimensional convolutional neural networks, which have shown very promising results in fields where patterns are sought to identify a class.
Modeling of the Cyber Attack
Measurements of process signals and control action values are critical to the proper functioning of a control system, and its modification by cyber attacks can produce instability in the control system [
73,
74]. A cyber attack by data manipulation is called an integrity attack, modeled by (
3), and an attack that results in a prolonged loss of these signals is called a type DoS attack, which is modeled by (
4).
where
corresponds to the sensor measurement that reaches the controller in the k-time,
corresponds to the sensor measurement before being transmitted to the controller in the k-time, and
is a vector injected by the attackers which changes the
measure in the k-time.
corresponds to the measurement before the start of the DoS attack. The time interval for the occurrence of the attack is defined by
.
For the development of the proposal, it is assumed that any sensor can be affected by any type of attack, integrity, or DoS. Additionally, the attacks may occur at any time in various parts of the system. The last premise is significant to note because simultaneous attacks are less discussed in previous works; thus, depending on the type of attack carried out on the system, output (
2) may take the form of (
3) and/or (
4).
4. Attack Detection and Isolation Method
In the context of this work, most cyber attack detection methods use the available data to develop a model that determines the usual behavior of the system. Then, by a comparison between the estimated outputs of the model and the actual process outputs, determination of if the behavior of the system is normal or if a cyber attack is taking place. To isolate the attack, which is nothing more than locating the part of the system that is being affected directly by the cyber attack, decoupled models of the system are developed that are susceptible only to cyber attacks that occur in specific parts of the system.
The procedure to perform this task can be grouped into three steps. Firstly, the generation of a residual signal is realized, and this process consists of comparing the measured output with an estimated output. This signal is denoted as residual signal,
, this is described in (
5).
where
are the set of output measures of the actual process, and
are the set of outputs estimated. The second step corresponds to the evaluation of the residual; in this case, a comparison of the residuals is made with a predefined threshold, as is shown in (
6).
The thresholds are obtained from data in which the attacks have been presented, thus allowing their detection and isolation. Finally, a decision-making process is carried out through indicators.
These steps involve the use of residuals that should take values close to 0 in situations where the system is not being attacked. On the other hand, when an attack is present, the residual signals must have values other than 0.
Although a single residual signal can alert or detect a cyber attack, a set of residuals is required to isolate it. Then, to locate the origin of the cyber attack, it is necessary that some residues be sensitive only for a particular part of the system. The above implies that the set of residuals must be independent of other cyber attacks defined. In this way, to isolate a cyber attack, a structured set of residuals is considered, where each residual vector can be used to detect a cyber attack in a specific place of the system.
In the architecture model proposed in this work, it is emphasized that second step will be an implicit step because the architecture based on artificial neural networks will interpret the input data generating intrinsic characteristics that will allow the evaluation to detect and isolate the attacks.
Architecture Proposed for the Detection and Isolation of Cyber Attacks in CPS
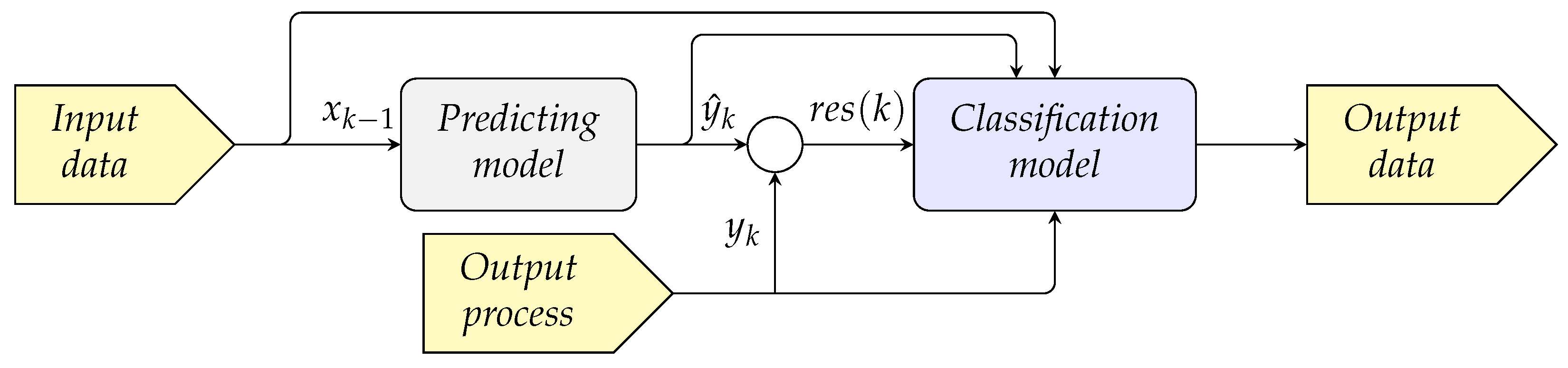
The architecture proposed is presented in
Figure 2. This architecture includes a prediction model which uses an input dataset
to estimate outputs
(these datasets will depend specifically on the type of data available from the process), and these values are used to obtain the residual signal
, as is shown in (
5). These signals are used by a classifier to detect anomalies presents in the process.
As the characteristics of the signals in a specific process are different then values with different magnitude could affect the classifier training procedure, therefore, all input data to the classifier are normalized using its mean and standard deviation to obtain a z-score for each one as is shown in (
7).
where
x are the input data,
is the mean, and
is the standard deviation.
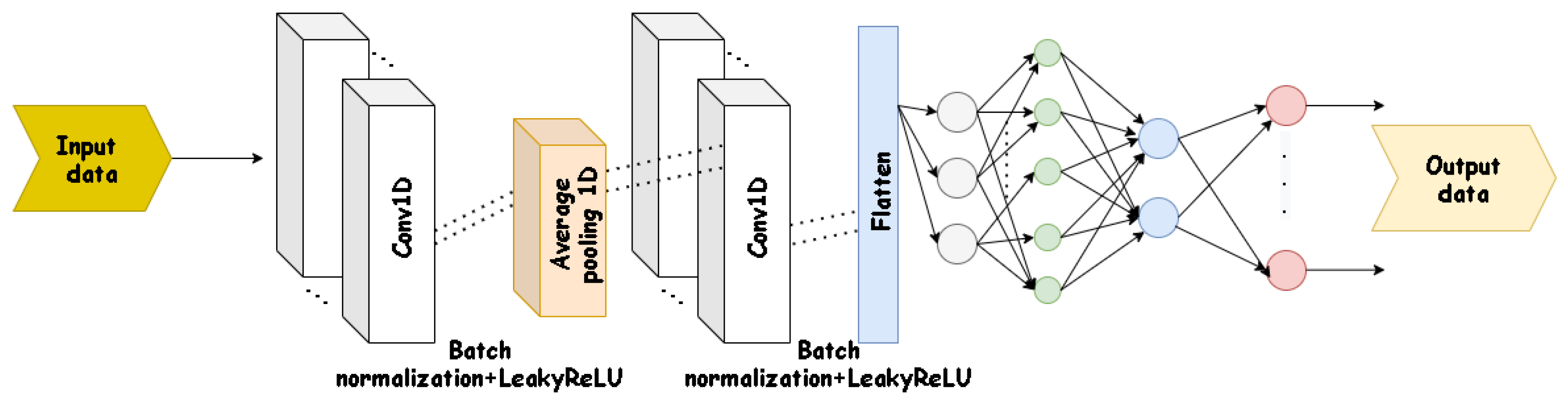
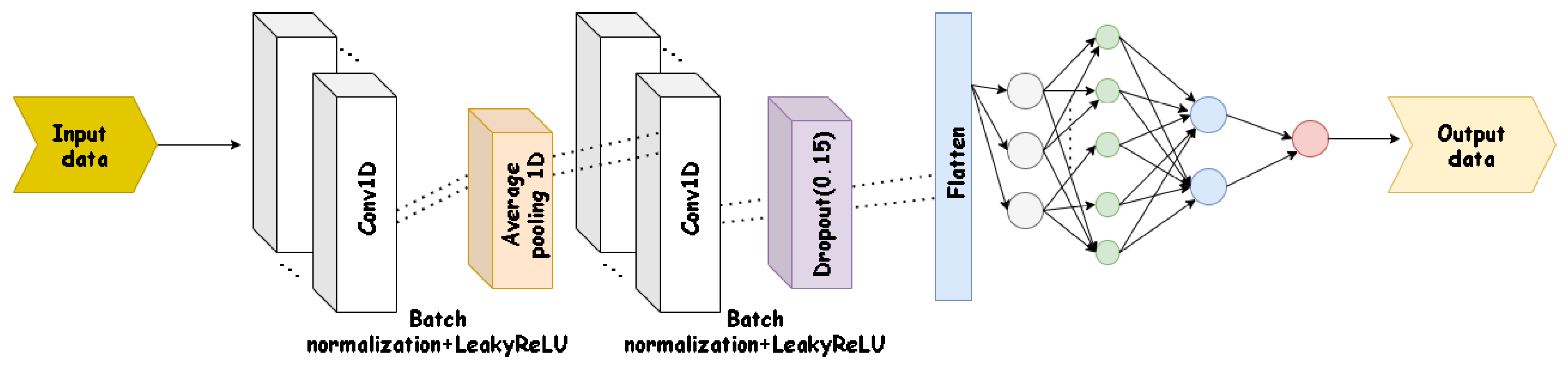
Although the architecture presented is general, it is a base for selecting different types of machine learning for the prediction and classification stages. The idea is to use deep neural networks to extract patterns that allow the detection of cyber attacks (such as LSTM or CNN 1-dimensional). As was not included a method to find spatial-temporal correlations to detect cyber attacks, it is expected that neural networks will be able to carry out this task implicitly.
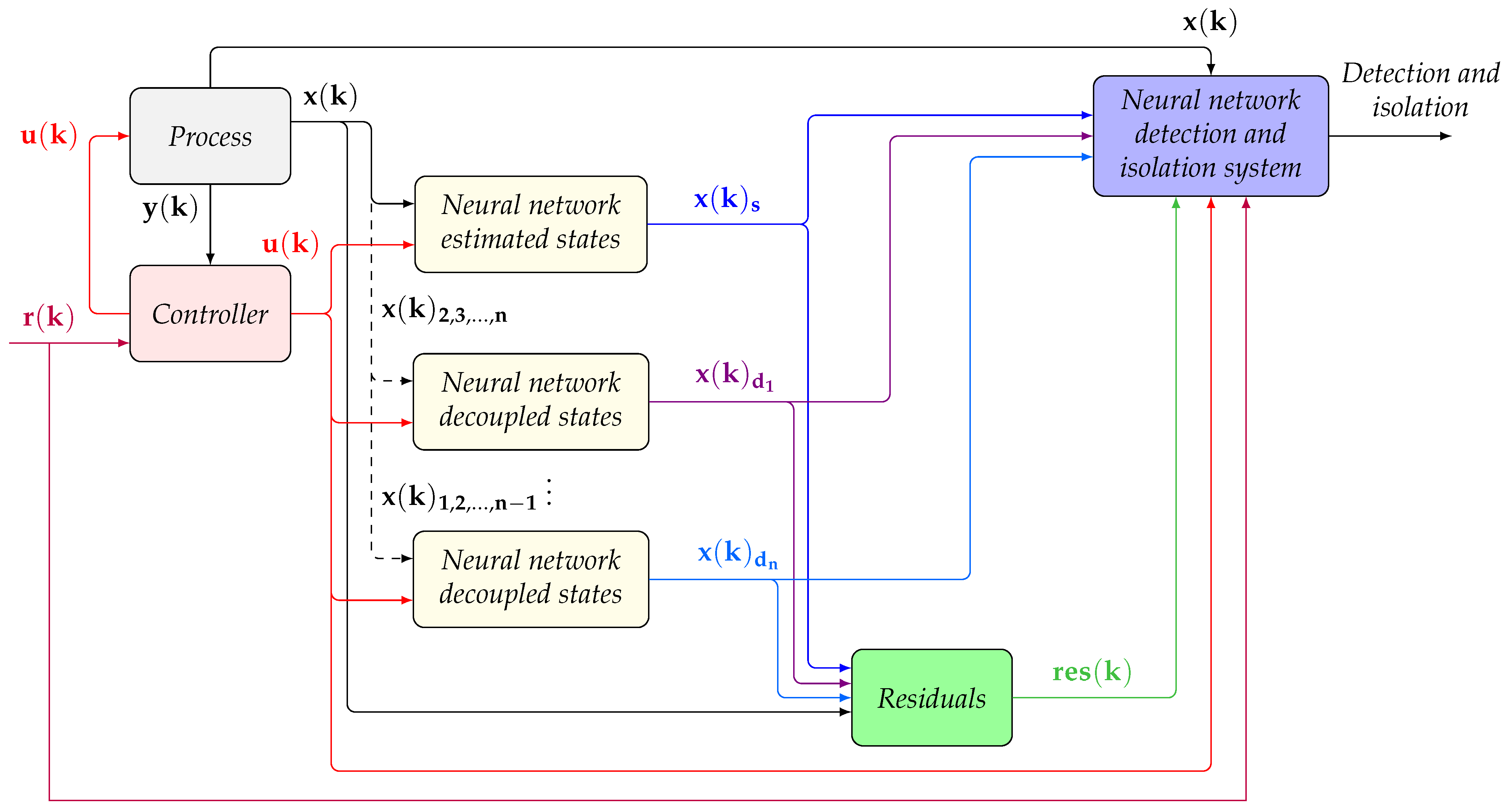
The architecture can be detailed as follows for a specific CPS, shown in
Figure 3. A model of the dynamics of the process generates the outputs signals
which correspond to the reconstruction of all the states (it is assumed that the outputs are the process states or some linear combination of them, although it can be extended to non-linear cases). In order to isolate the attack, there is a set of neural network models that relate the process states with their respective control actions for generate states that are decoupled from each other (
); in this way, it is possible to isolate the attack in a way equivalent to the use of UIOs, but with the advantage that neural networks allow addressing the uncertainty in the representations. With this set of neural networks,
is generated.
Detection and isolation functions are implemented using artificial neural networks, which use the process states , the control actions , the reference signals , the residual signals , and the signals generated by the predicting model.
Mean squared error (MSE) [
75] is adopted as the model’s loss function to train the predicting model.
where
n is the amount of data,
is the real state, and
is the estimated state. For the classifier, the cost function categorical crossentropy (CCE) is used [
76] because it is a single-label multi-class classification problem.
With
p classes, training data size of
l, the input of
, where
and
(
),
is the estimated probability that belongs to class
k, and
(0 or 1) becomes the given label (
9).
6. Conclusions
New applications of industrial automation request great flexibility in the systems, which is supported by the increase in the interconnection between its components. At the same time, it generates a large gap that affects the security of control systems. Current solutions are oriented mainly to avoid the occurrence of attacks, but, regardless, the problems appear; so, recently, the interest in developing new proposals that contribute to detect attacks has grown.
In this work, a new architecture for DoS and integrity cyber attacks detection and isolation in Cyber Physical Systems using one-dimensional Convolutional Neural Networks was presented, thereby overcoming other models that are based on machine learning and model-based methods, such as the use of Unknown Input Observers. This architecture involves a series of steps to achieve its purpose. The first step was to generate an estimated output of the process under a regression model. The next step was to generate a residual signal under the comparison of the measured process outputs with estimated outputs. Then, a classification model was added whose input data are different characteristics, such as control actions, estimated outputs, measured process outputs, and residual signals. This model allowed for detection and isolation of different eventualities that were defined in classes. Finally, from the detected class, alarm signals were generated that are used to report the occurrence of a cyber attack, allowing to define the type of attack and the part of the system that is being affected by the attack.
The architecture proposed does not use threshold information to detect and isolate attacks, as is the case with model-based methods, such as Unknown Input Observers, which often use this information. These models require an exhaustive selection of these thresholds, which can cause both false detections and anomalous situations that go undetected, and the proposed architecture provides shows advantages over this.
The performance of the proposed architecture was validated by two test benches obtaining satisfactory results compared to other methods. The results on the SWaT dataset allowed observing that, in terms of precision and accuracy, the indexes are very close to the highest scores of other works, and these obtained a score of . In terms of recall and F1Score metrics, it presented a score of , which outperforms the previously proposed methods by a good margin. Overall, the proposed system has a high true positive rate and a low false positive rate. On the other hand, the ability of the system to be able to detect and isolate cyber attacks that may occur simultaneously is highlighted, which was presented in the three-tank system testbed. In the defined classes, the accuracy presents scores above , and the precision is above , in cases where attacks occur in a single part of the system, while the score is higher than in cases where simultaneous attacks occur. In terms of the F1 score metric, the scores are above , which is a very promising result. Finally, with respect to the recall metric, the scores are above , in most cases. With the cases presented in this testbed, it was possible to demonstrate the ability of the proposed architecture to detect and locate attacks that may occur simultaneously. This is interesting because these types of experiments are rarely performed, let alone provide evidence of systems that can detect these types of situations, which are not alien to eventualities that may occur in reality. In both cases highlighted, there was a high rate of TNR in each of the classes, ranging between 0.98 and 0.99.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}