
Dynamic Frequency Support for Low Inertia Power Systems by Renewable Energy Hubs with Fast Active Power Regulation

 ,
, 
 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Description of Test Model of the North of the Netherlands Network (N3)
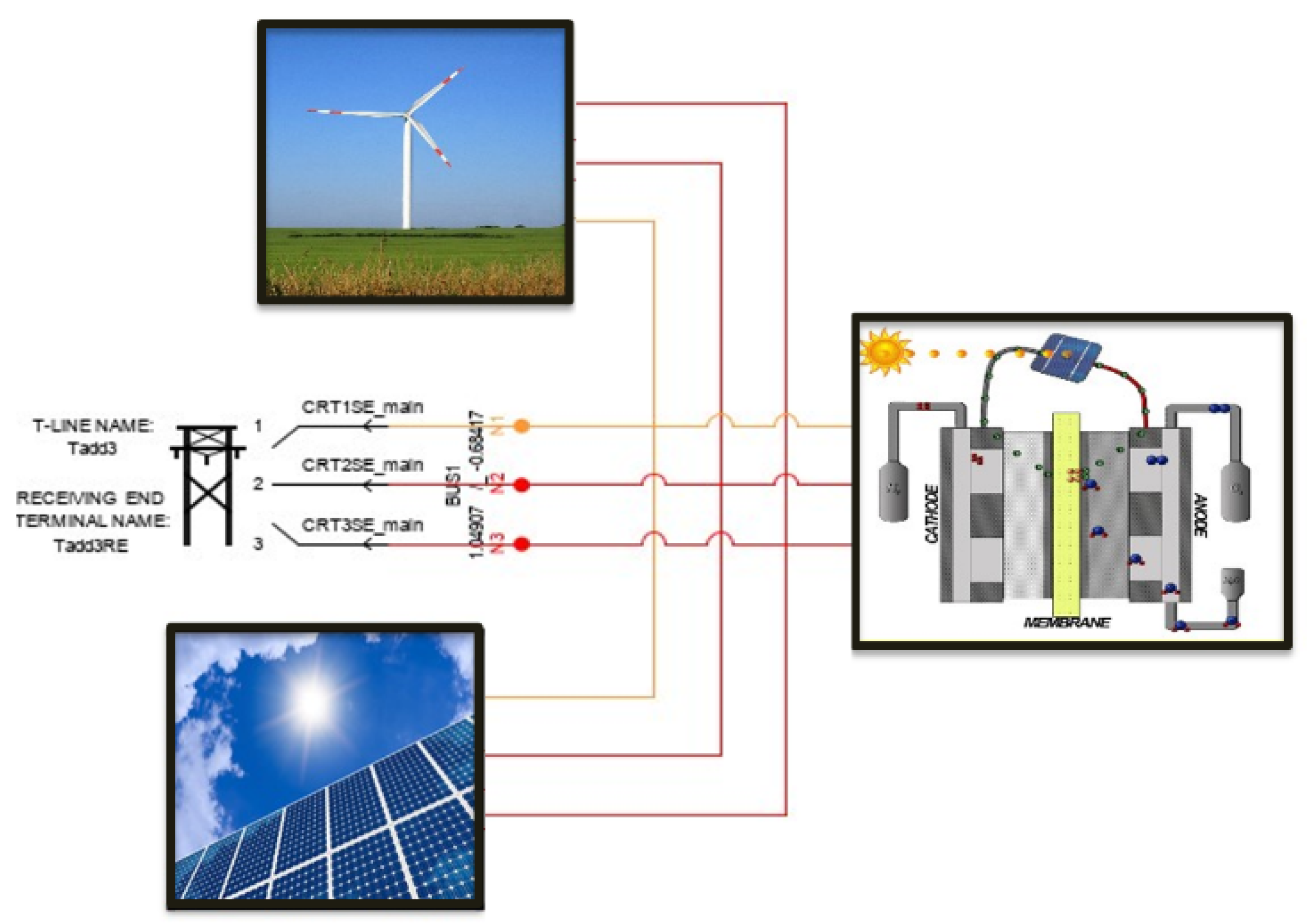
3. Modifications Performed in the N3 Network to Integrate Elements Equipped with FAPR
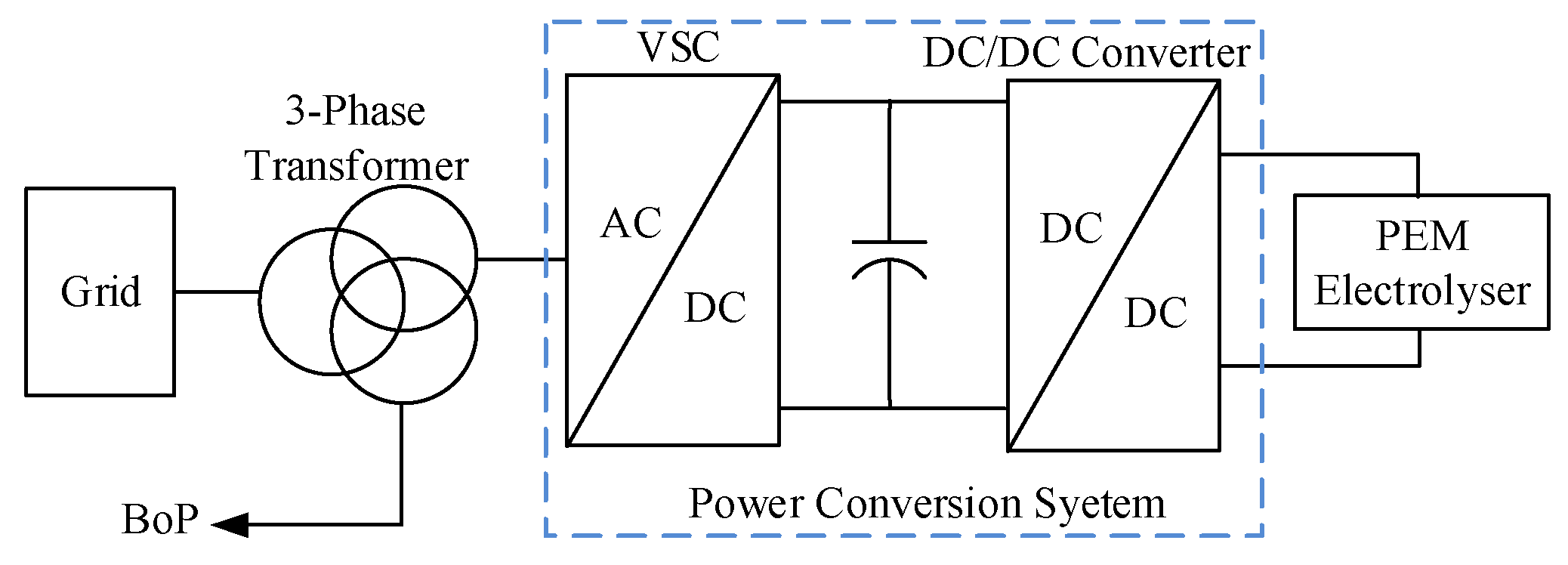
3.1. Representation of a 300 MW Electrolyzer
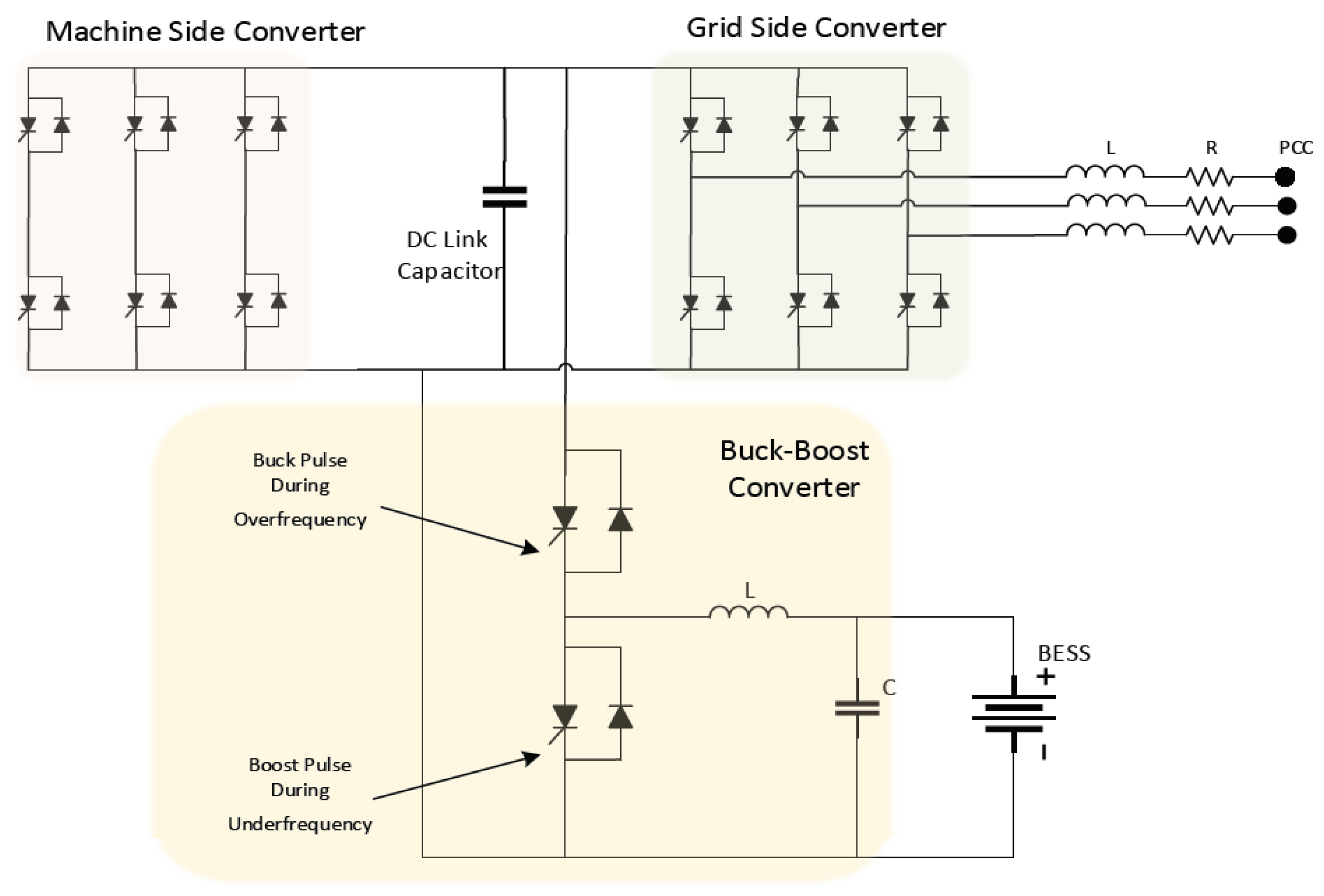
3.2. Representation of a Type 4 Wind Turbine and Type-4 Solar PV Farm
4. Selected FAPR Strategies
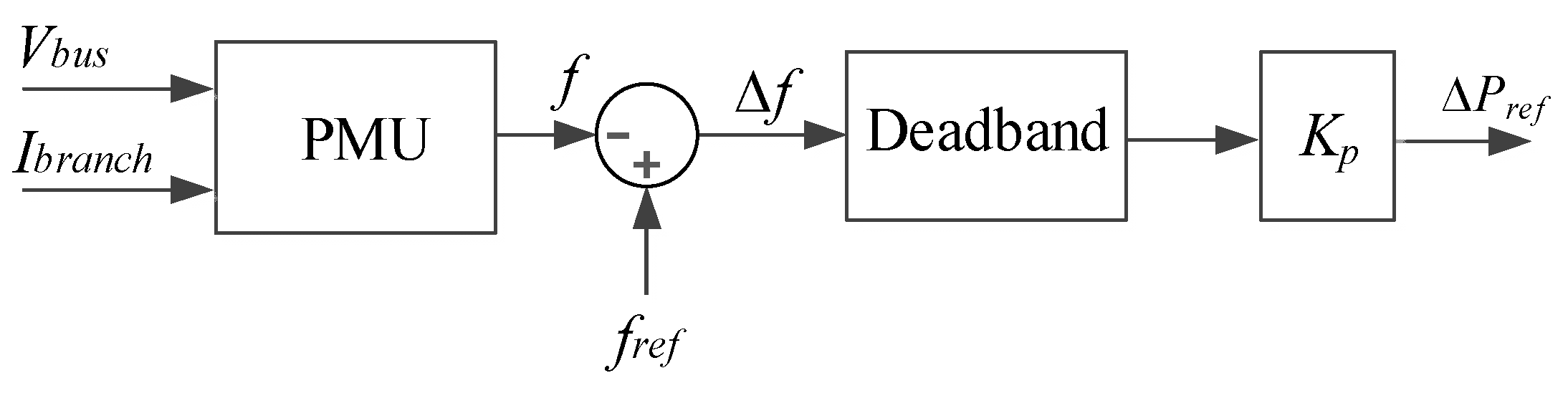
4.1. Droop-Based FAPR
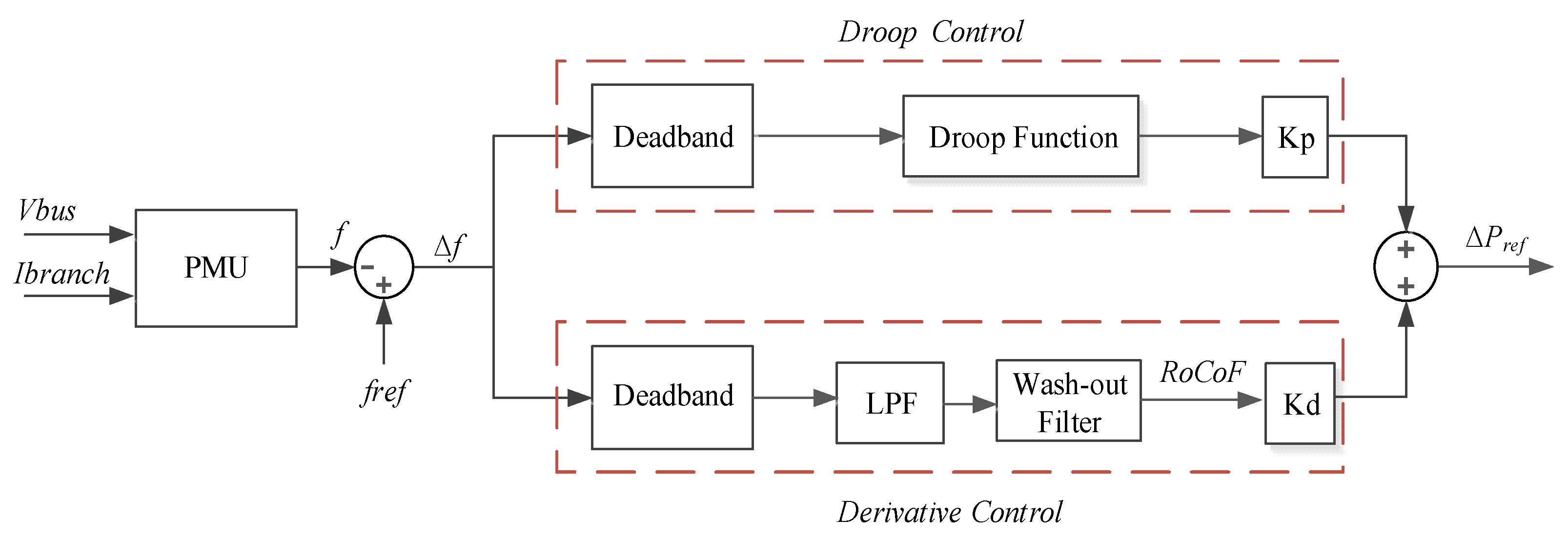
4.2. Droop Derivative-Based FAPR
4.3. VSP-Based FAPR
5. Simulation Results
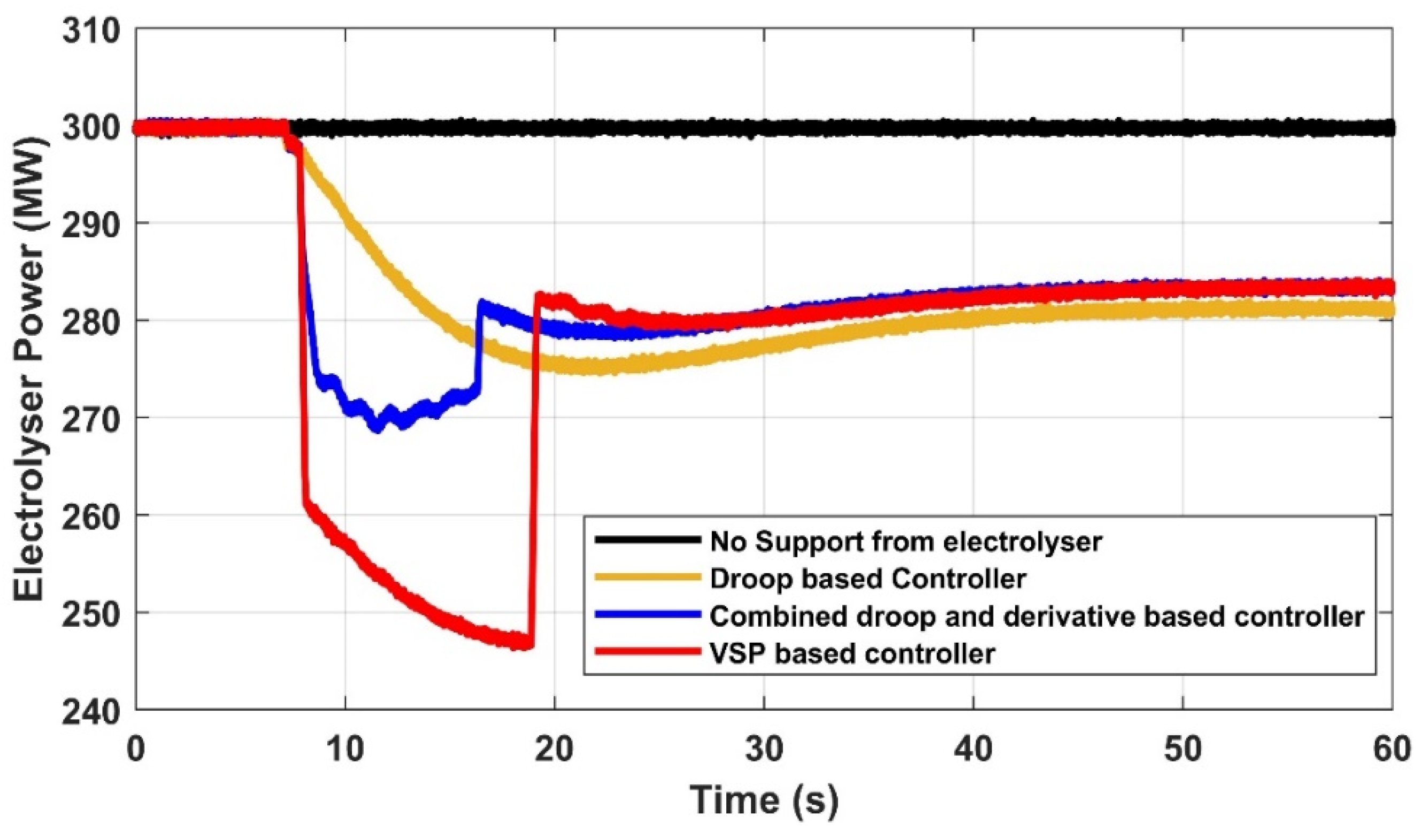
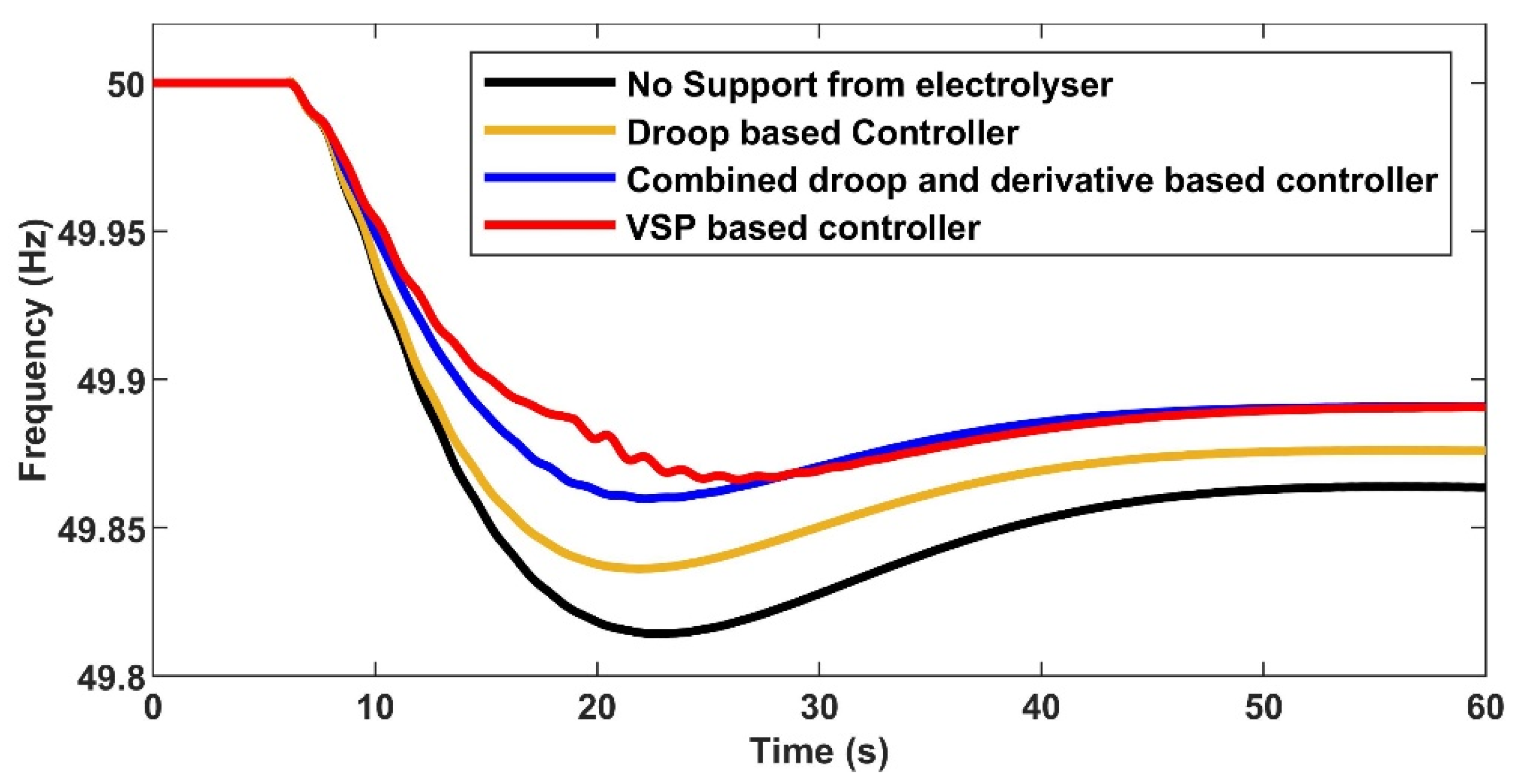
5.1. Frequency Support through FAPR Implemented in Electrolyzer
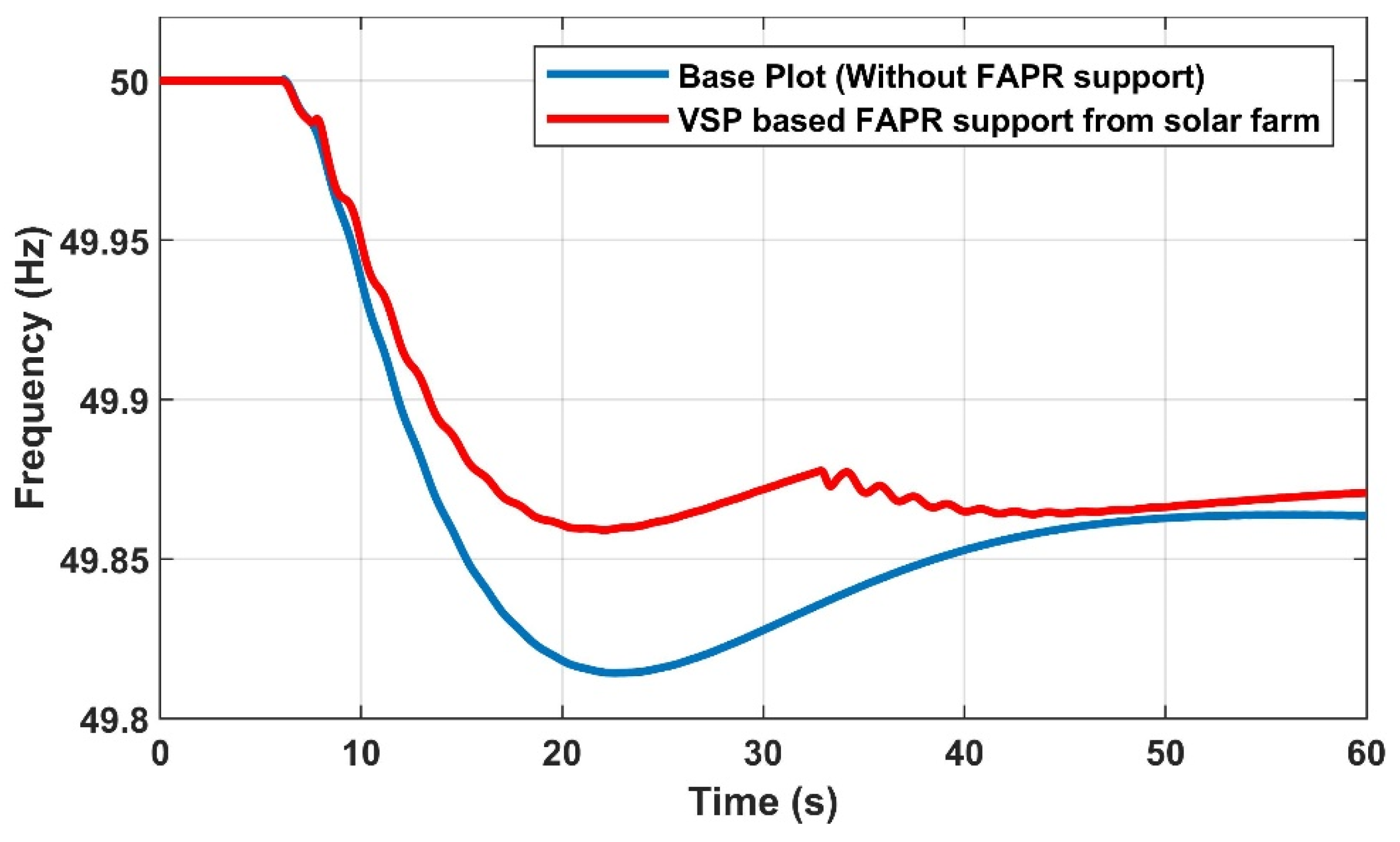
5.2. Frequency Support through VSP-Based FAPR Implemented in the Solar PV Farm
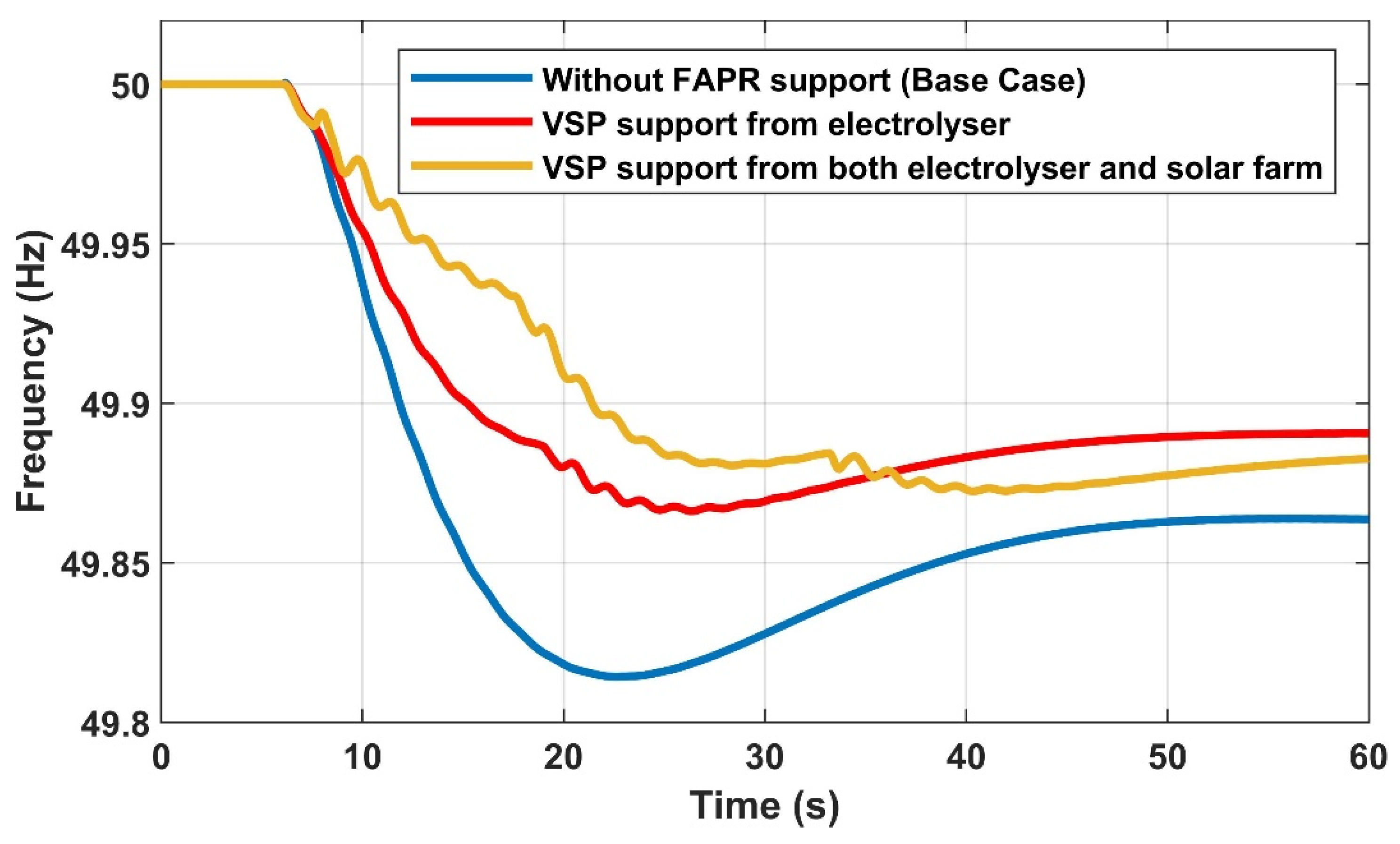
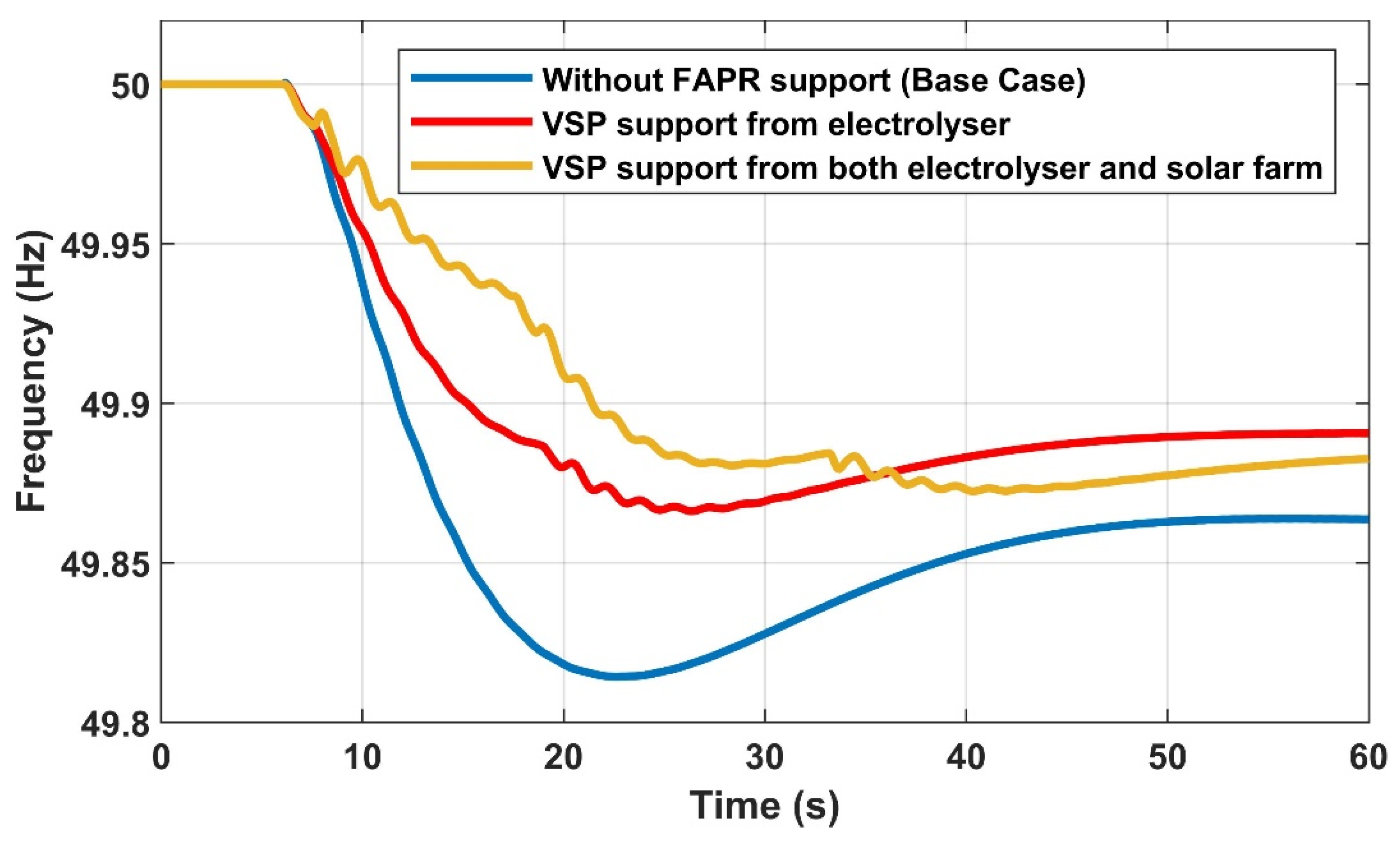
5.3. Deployment of FAPR by the Different Controllable Sources within the Hub
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| RoCoF | Rate of Change of Frequency |
| BPMS | Battery Power Management System |
| BESS | Battery Energy Storage System |
| AGC | Automatic Generation Control |
References
- Rakhshani, E.; Gusain, D.; Sewdien, V.; Torres, J.L.R.; van der Meijden, M.A.M.M. A Key Performance Indicator to Assess the Frequency Stability of Wind Generation Dominated Power System. IEEE Access 2019, 7, 130957–130969. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York NY, USA, 1994. [Google Scholar]
- Hatziargyriou, N.; Milanovic, J.; Rahmann, C.; Ajjarapu, V.; Canizares, C.; Erlich, I.; Hill, D.; Hiskens, I.; Kamwa, I.; Pal, B.; et al. Definition and Classification of Power System Stability—Revisited & Extended. IEEE Trans. Power Syst. 2021, 36, 3271–3281. [Google Scholar] [CrossRef]
- Hong, Q.; Khan, M.A.U.; Henderson, C.; Egea-Àlvarez, A.; Tzelepis, D.; Booth, C. Addressing Frequency Control Challenges in Future Low-Inertia Power Systems: A Great Britain Perspective. Engineering 2021, in press. [Google Scholar] [CrossRef]
- Rakhshani, E.; Perilla, A.; Veerakumar, N.; Ahmad, Z.; Torres, J.L.R.; van der Meijden, M.A.M.M. Analysis and tuning methodology of fapi controllers for maximising the share of grid-connected wind generations. IET Renew. Power Gener. 2020, 14, 3816–3823. [Google Scholar] [CrossRef]
- Sanchez, F.; Gonzalez-Longatt, F.; Torres, J.L.R. Multi-objective optimal provision of fast frequency response from EV clusters. IET Gener. Transm. Distrib. 2020, 14, 5580–5587. [Google Scholar] [CrossRef]
- Rakhshani, E.; Rouzbehi, K.; Sánchez, A.J.; Tobar, A.C.; Pouresmaeil, E. Integration of Large Scale PV-Based Generation into Power Systems: A Survey. Energy 2019, 12, 1425. [Google Scholar] [CrossRef] [Green Version]
- Low, F.; Power, I.; Using, S.; Technique, C. Primary Frequency Response Enhancement for Future Low Inertia Power Systems Using Hybrid Control Technique. Energies 2018, 11, 699. [Google Scholar] [CrossRef] [Green Version]
- Rakhshani, E.; Remon, D.; Rodriguez, P. Effects of PLL and Frequency Measurements on LFC Problem in Multi-Area HVDC Interconnected Systems. Int. J. Electr. Power Energy. Syst. 2016, 81, 140–152. [Google Scholar] [CrossRef]
- Tuinema, B.W.; Adabi, E.; Ayivor, P.K.S.; Suárez, V.G.; Liu, L.; Perilla, A.; Ahmad, Z.; Torres, J.L.R.; van der Meijden, M.A.M.M.; Palensky, P. Modelling of large-sized electrolysers for real-time simulation and study of the possibility of frequency support by electrolysers. IET Gener. Transm. Distrib. 2020, 14, 1985–1992. [Google Scholar] [CrossRef]
- Dreidy, M.; Mokhlis, H.; Mekhilef, S. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sustain. Energy Rev. 2017, 69, 144. [Google Scholar] [CrossRef]
- Zhang, C.; Rakhshani, E.; Veerakumar, N.; Torres, J.L.R.; Palensky, P. Modeling and Optimal Tuning of Hybrid ESS Supporting Fast Active Power Regulation of Fully Decoupled Wind Power Generators. IEEE Access 2021, 9, 46409–46421. [Google Scholar] [CrossRef]
- Torres, J.L.R.; Tuinema, B.W.; Adabi, M.E.; Ahmad, Z.; Suárez, V.G.; Ayivor, P.K.S.; Kumar, N.V.; Liu, L.; Perilla, A.; Alshehri, F.A.; et al. TSO2020 Activity 2—Final Report: Stability Analysis of an International Electricity System connected to Regional and Local Sustainable Gas Systems; TSO2020 Project (Electric “Transmission and Storage Options” along TEN-E and TEN-T Corridors for 2020); December 2019. Available online: http://tso2020.eu/wp-content/uploads/2020/01/TSO2020_Final_Report_TUD.pdf (accessed on 11 July 2021).
- Veerakumar, N.; Ahmad, Z.; Adabi, M.E.; Torres, J.R.; Palensky, P.; van der Meijden, M.; Gonzalez-Longatt, F. Fast Active Power-Frequency Support Methods by Large Scale Electrolyzers for Multi-Energy Systems. In Proceedings of the 2020 IEEE PES Innovative Smart Grid Technologies Europe (ISGT-Europe), The Hague, The Netherlands, 26–28 October 2020; pp. 151–155. [Google Scholar] [CrossRef]
- Torres, J.L.R.; Ahmad, Z.; Kumar, N.V.; Rakhshani, E.; Adabi, E.; Palensky, P.; van der Meijden, M.A.M.M. Power Hardware-in-the-Loop-Based Performance Analysis of Different Converter Controllers for Fast Active Power Regulation in Low-Inertia Power Systems. Energies 2021, 14, 3274. [Google Scholar] [CrossRef]
- Robert, C. Review of International Grid Codes; Lawrence Berkeley National Laboratory: Berkeley, CA, USA, 2018. [Google Scholar]
- Noor-A-Rahim, M.; Khyam, M.O.; Li, X.; Pesch, D. Sensor Fusion and State Estimation of IoT Enabled Wind Energy Conversion System. Sensors 2019, 19, 1566. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Enescu, F.M.; Ionescu, V.M.; Marinescu, C.N.; Ştirbu, C. System for monitoring and controlling renewable energy sources. In Proceedings of the 2017 9th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), Targoviste, Romania, 29 June–1 July 2017; pp. 1–6. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Generator/HVDC Link | Year 2030 Scenario |
|---|---|
| GEMINI Wind farm (EOS) | 450 MW |
| NorNed Connection (EEM) | 700 MW |
| COBRAcable Connection (EOS) | −700 MW |
| GEN1 (EOS) | 3 × 430 MW |
| GEN2 (EOS) | 2 × 430 MW |
| GEN3 (EOS) | 233 MW |
| Total | 3490 MW |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rueda Torres, J.; Kumar, N.V.; Rakhshani, E.; Ahmad, Z.; Adabi, E.; Palensky, P.; van der Meijden, M. Dynamic Frequency Support for Low Inertia Power Systems by Renewable Energy Hubs with Fast Active Power Regulation. Electronics 2021, 10, 1651. https://doi.org/10.3390/electronics10141651
Rueda Torres J, Kumar NV, Rakhshani E, Ahmad Z, Adabi E, Palensky P, van der Meijden M. Dynamic Frequency Support for Low Inertia Power Systems by Renewable Energy Hubs with Fast Active Power Regulation. Electronics. 2021; 10(14):1651. https://doi.org/10.3390/electronics10141651
Chicago/Turabian StyleRueda Torres, Jose, Nidarshan Veera Kumar, Elyas Rakhshani, Zameer Ahmad, Ebrahim Adabi, Peter Palensky, and Mart van der Meijden. 2021. "Dynamic Frequency Support for Low Inertia Power Systems by Renewable Energy Hubs with Fast Active Power Regulation" Electronics 10, no. 14: 1651. https://doi.org/10.3390/electronics10141651
APA StyleRueda Torres, J., Kumar, N. V., Rakhshani, E., Ahmad, Z., Adabi, E., Palensky, P., & van der Meijden, M. (2021). Dynamic Frequency Support for Low Inertia Power Systems by Renewable Energy Hubs with Fast Active Power Regulation. Electronics, 10(14), 1651. https://doi.org/10.3390/electronics10141651