
Stability Improvement of Dynamic EV Wireless Charging System with Receiver-Side Control Considering Coupling Disturbance





Abstract
:1. Introduction
2. Model of SS-Compensated WPT Systems and Dynamic Issues Illustration
2.1. SS-Compensated Wireless Charging System with Receiver-Side Buck Converter
2.2. Coupling Issues in Constant Speed Driving and Braking/Acceleration
3. Overshoot Damping and Feedforward Control
4. Experimental Results
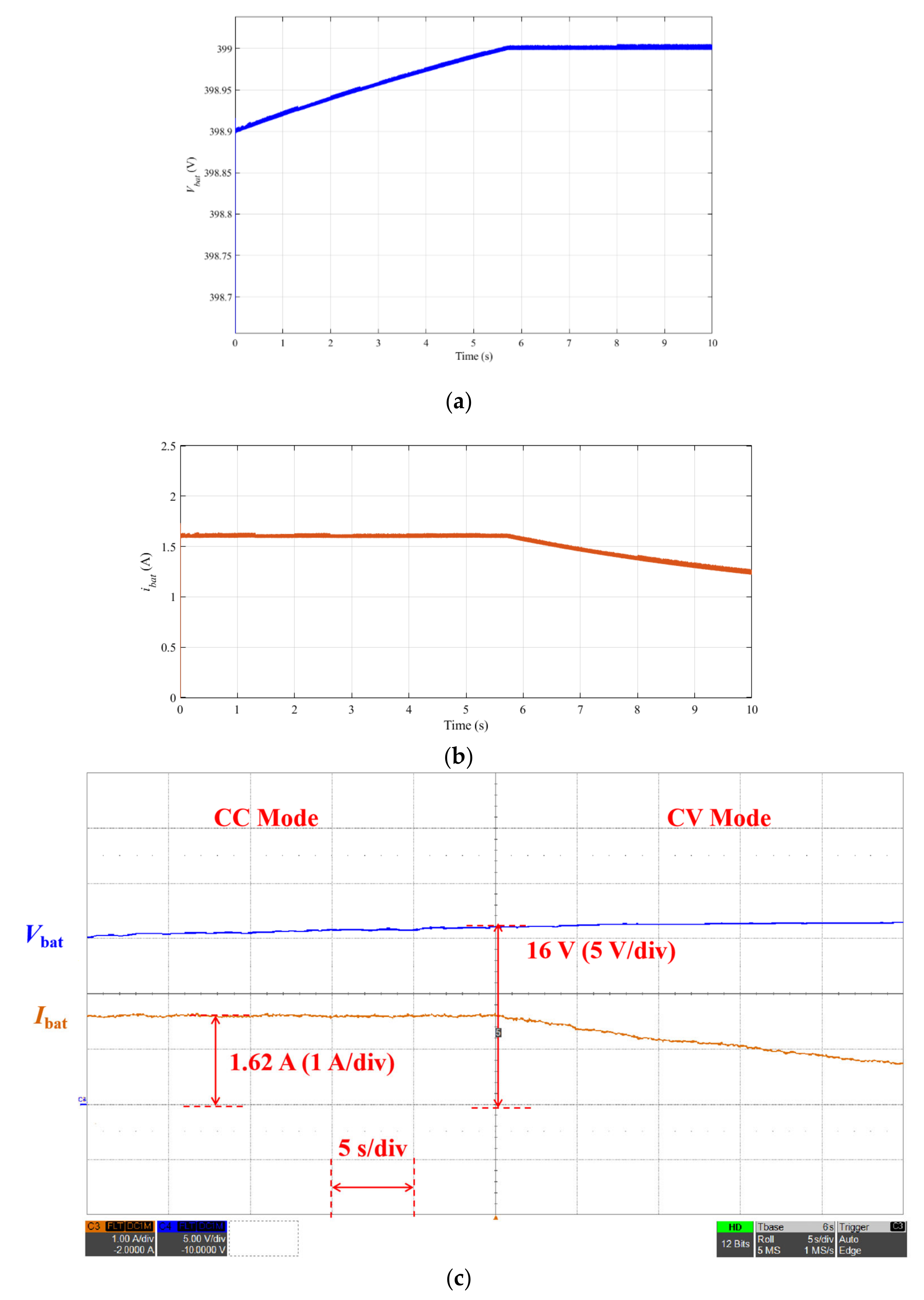
4.1. CC/CV Implementation
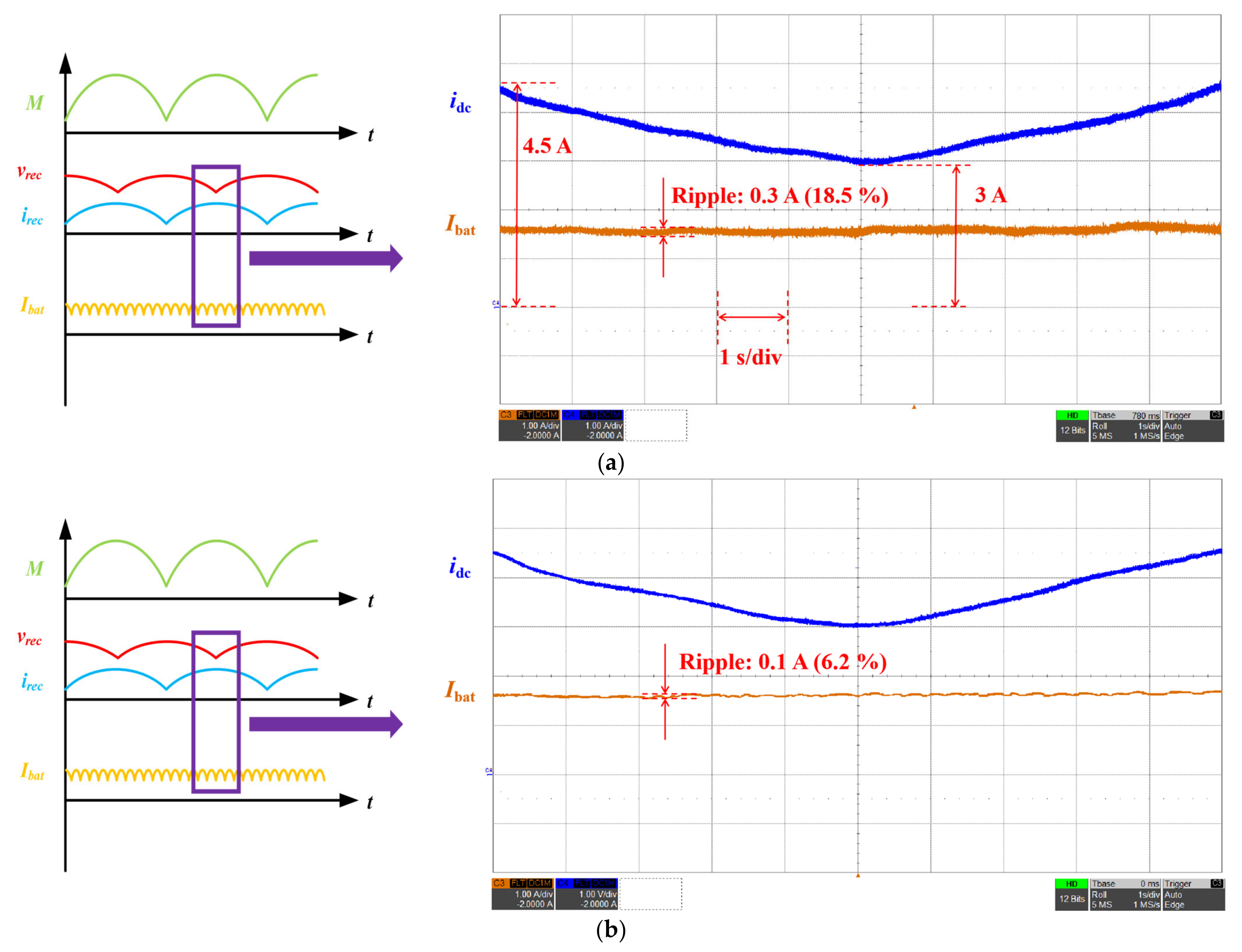
4.2. Constant Speed Driving—Sinusoidal Disturbance
4.3. Braking/Acceleration Driving—Step Disturbance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sun, L.; Ma, D.; Tang, H. A review of recent trends in wireless power transfer technology and its applications in electric vehicle wireless charging. Renew. Sustain. Energy Rev. 2018, 91, 490–503. [Google Scholar] [CrossRef]
- Joseph, P.K.; Elangovan, D. A review on renewable energy powered wireless power transmission techniques for light electric vehicle charging applications. J. Energy Storage 2018, 16, 145–155. [Google Scholar] [CrossRef]
- Bi, Z.; Kan, T.; Mi, C.C.; Zhang, Y.; Zhao, Z.; Keoleian, G.A. A review of wireless power transfer for electric vehicles: Prospects to enhance sustainable mobility. Appl. Energy 2016, 179, 413–425. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Ni, X.; Liu, J.; Wang, R.; Ma, J.; Zhai, Y.; Huang, Y. Design and Optimization of Coupling Coils for Bidirectional Wireless Charging System of Unmanned Aerial Vehicle. Electronics 2020, 9, 1964. [Google Scholar] [CrossRef]
- Rim, C.T. Wireless charging research activities around the world: KAIST Tesla Lab (Part). IEEE Power Electron. Mag. 2014, 1, 32–37. [Google Scholar]
- Afonso, J.A.; Duarte, H.G.; Cardoso, L.A.L.; Monteiro, V.; Afonso, J.L. Wireless Communication and Management System for E-Bike Dynamic Inductive Power Transfer Lanes. Electronics 2020, 9, 1485. [Google Scholar] [CrossRef]
- Li, S.; Li, W.; Deng, J.; Nguyen, T.D.; Mi, C.C. A double-sided LCC compensation network and its tuning method for wireless power transfer. IEEE Trans. Veh. Technol. 2015, 64, 2261–2273. [Google Scholar] [CrossRef]
- Seong, J.Y.; Lee, S.-S. A Study on Precise Positioning for an Electric Vehicle Wireless Power Transfer System Using a Ferrite Antenna. Electronics 2020, 9, 1289. [Google Scholar] [CrossRef]
- Li, Z.; Zhu, C.; Jiang, J.; Song, K.; Wei, G. A 3-kw wireless power transfer system for sightseeing car supercapacitor charge. IEEE Trans. Power Electron. 2017, 32, 3301–3316. [Google Scholar] [CrossRef]
- Chen, M.; Cheng, E.K.-W.; Hu, J. Near field wireless power transfer for multiple receivers by using a novel magnetic core structure. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 1–6. [Google Scholar]
- Yang, Y.; Tan, S.C.; Hui, S.Y.R. Fast hardware approach to determining mutual coupling of series–series-compensated wireless power transfer systems with active rectifiers. IEEE Trans. Power Electron. 2020, 35, 11026–11038. [Google Scholar] [CrossRef]
- SAE. Wireless Power Transfer for Light-duty Plug-in/Electric Vehicles and Alignment Methodology; SAE: Warrendale, PA, USA, 2020. [Google Scholar]
- Conductix Wampfler. IPT Charge for Electric Vehicles. 2012. Available online: https://www.conductix.com/sites/default/files/downloads/KAT9200-0001-E_IPT_Charge_for_Electric_Vehicles.pdf (accessed on 2 July 2021).
- Toshiba. 7kW Wireless Power Transmission Technology for EV Charging. Available online: https://www.global.toshiba/ww/technology/corporate/rdc/rd/fields/14-e01.html (accessed on 25 April 2021).
- Green Power Technologies. Electric Vehicle. Available online: http://www.egreenpower-eng.com/project/ev/ (accessed on 25 April 2021).
- Yeo, T.D.; Kwon, D.; Khang, S.T.; Yu, J.W. Design of Maximum Efficiency Tracking Control Scheme for Closed-Loop Wireless Power Charging System Employing Series Resonant Tank. IEEE Trans. Power Electron. 2017, 32, 471–478. [Google Scholar] [CrossRef]
- Yang, Y.; Zhong, W.; Kiratipongvoot, S.; Tan, S.C.; Hui, S.Y.R. Dynamic Improvement of Series–Series Compensated Wireless Power Transfer Systems Using Discrete Sliding Mode Control. IEEE Trans. Power Electron. 2018, 33, 6351–6360. [Google Scholar] [CrossRef]
- Zhong, W.; Li, H.; Hui, S.Y.R.; Xu, M.D. Current Overshoot Suppression of Wireless Power Transfer Systems With on–off Keying Modulation. IEEE Trans. Power Electron. 2021, 36, 2676–2684. [Google Scholar] [CrossRef]
- Song, S.; Dong, S.; Zhang, Q. Receiver Current-Stress Mitigation for a Dynamic Wireless Charging System Employing Constant Resistance Control. IEEE Trans. Power Electron. 2021, 36, 3883–3893. [Google Scholar] [CrossRef]
- Yao, Y.; Gao, S.; Mai, J.; Liu, X.; Zhang, X.; Xu, D. A Novel Misalignment Tolerant Magnetic Coupler for Electric Vehicle Wireless Charging. IEEE J. Emerg. Sel. Top. Ind. Electron. 2021, 1. [Google Scholar] [CrossRef]
- Rong, C.; He, X.; Wu, Y.; Qi, Y.; Wang, R.; Sun, Y.; Liu, M.; Rong, C.; He, X.; Wu, Y.; et al. Optimization Design of Resonance Coils with High Misalignment Tolerance for Drone Wireless Charging Based on Genetic Algorithm. IEEE Trans. Ind. Appl. 2021, 1. [Google Scholar] [CrossRef]
- Kalwar, K.A.; Mekhilef, S.; Seyedmahmoudian, M.; Horan, B. Coil Design for High Misalignment Tolerant Inductive Power Transfer System for EV Charging. Energies 2016, 9, 937. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Mai, R.; Zhou, L.; Li, Y.; Hu, J.; He, Z.; Yan, Z.; Wang, S. Dynamic Improvement of Inductive Power Transfer Systems with Maximum Energy Efficiency Tracking Using Model Predictive Control: Analysis and Experimental Verification. IEEE Trans. Power Electron. 2020, 35, 12752–12764. [Google Scholar] [CrossRef]
- Bennis, M.; Debbah, M.; Poor, H.V. Ultrareliable and Low-Latency Wireless Communication: Tail, Risk, and Scale. Proc. IEEE 2018, 106, 1834–1853. [Google Scholar] [CrossRef] [Green Version]
- Zhong, W.; Hui, S.Y.R. Charging Time Control of Wireless Power Transfer Systems Without Using Mutual Coupling Information and Wireless Communication System. IEEE Trans. Ind. Electron. 2017, 64, 228–235. [Google Scholar] [CrossRef]
- Hatchavanich, N.; Sangswang, A.; Konghirun, M. Secondary-Side Voltage Control via Primary-Side Controller for Wireless EV Chargers. IEEE Access 2020, 8, 203543–203554. [Google Scholar] [CrossRef]
- Hiramatsu, T.; Huang, X.; Kato, M.; Imura, T.; Hori, Y. Wireless charging power control for HESS through receiver side voltage control. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 1614–1619. [Google Scholar]
- Song, S.; Zhang, Q.; He, Z.; Li, H.; Zhang, X. Uniform Power Dynamic Wireless Charging System with I-Type Power Supply Rail and DQ-Phase-Receiver Employing Receiver-Side Control. IEEE Trans. Power Electron. 2020, 35, 11205–11212. [Google Scholar] [CrossRef]
- Liu, J.; Liu, Z.; Su, H.; Liu, J.; Liu, Z.; Su, H. Passivity-Based PI Control for Receiver Side of Dynamic Wireless Charging System in Electric Vehicles. IEEE Trans. Ind. Electron. 2021, 1. [Google Scholar] [CrossRef]
- Ze, Z.; Zhang, L.; Liu, Z.; Chen, Q.; Long, R.; Su, H. Model Predictive Control for the Receiving-Side DC-DC Converter of Dynamic Wireless Power Transfer. IEEE Trans. Power Electron. 2020, 35, 8985–8997. [Google Scholar]
- Rim, C.; Cho, G. Phasor transformation and its application to the DC/AC analyses of frequency phase-controlled series resonant converters (SRC). IEEE Trans. Power Electron. 1990, 5, 201–211. [Google Scholar] [CrossRef]
- Mitchell, D.M. DC-DC Switching Regulator Analysis; McGraw-Hill: New York, NY, USA, 1988. [Google Scholar]
- Rim, C.T. Unified general phasor transformation for AC converters. IEEE Trans. Power Electron. 2011, 26, 2465–2475. [Google Scholar] [CrossRef]
- Rakhymbay, A.; Khamitov, A.; Bagheri, M.; Alimkhanuly, B.; Lu, M.; Phung, T. Precise Analysis on Mutual Inductance Variation in Dynamic Wireless Charging of Electric Vehicle. Energies 2018, 11, 624. [Google Scholar] [CrossRef] [Green Version]
- Ahn, D.; Kim, S.; Moon, J.; Cho, I.-K. Wireless Power Transfer With Automatic Feedback Control of Load Resistance Transformation. IEEE Trans. Power Electron. 2016, 31, 7876–7886. [Google Scholar] [CrossRef]
- Fu, M.; Yin, H.; Zhu, X.; Ma, C. Analysis and Tracking of Optimal Load in Wireless Power Transfer Systems. IEEE Trans. Power Electron. 2015, 30, 3952–3963. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | |
|---|---|---|
| f | 85 kHz | |
| WPT Coils | Lp, Ls | 150 μH |
| Cp, Cs | 23.4 nF | |
| Rp, Rs | 0.28 Ω | |
| M | 20 μH | |
| Buck converter | Cdc | 100 μF |
| Lo | 2 mH | |
| Co | 100 μF | |
| Ro | 4 Ω | |
| rbat | 0.1 Ω | |
| Components | Value/Part Number |
|---|---|
| Lp, Ls | 149 μH, 152 μH |
| Cp, Cs | 23.8 nF, 21.2 nF, film capacitors |
| Cf, Cb | 100 µF, CL32B106KBJNNNE × 1 |
| Lb | 2 mH, hand-made with N49 core |
| Li-ion Battery | NCR 18650B × 4 |
| Gate Driver | ADuM3223 × 3 |
| MOSFETs for full-bridge inverter | IRF740 × 4 |
| MOSFETs for buck converter | IPP075N15N3G × 2 |
| Diode | IPP055N03L × 4 |
| DSP | TMS320F28335 × 2 |
| Ref. No. | Communication | Load | Power Setup | Disturbance Issue | Settling Time | Overshoot | Current Ripple |
|---|---|---|---|---|---|---|---|
| [35] | Yes | Pure resistance | 40 W | Coupling Step variation (braking/acceleration) | 170 ms | 53.3% | NA |
| [36] | Yes | Pure resistance | 40 W | Load Step variation | Few seconds | Not mentioned | NA |
| This paper | No | Li-ion battery | 30 W | Coupling Sinusoidal variation(constant speed driving) | NA | NA | 6.2% |
| Coupling Step variation (braking/acceleration) | 49 ms | 27.7% | NA |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, K.; Cheng, K.W.E.; Yang, Y.; Pan, J. Stability Improvement of Dynamic EV Wireless Charging System with Receiver-Side Control Considering Coupling Disturbance. Electronics 2021, 10, 1639. https://doi.org/10.3390/electronics10141639
Chen K, Cheng KWE, Yang Y, Pan J. Stability Improvement of Dynamic EV Wireless Charging System with Receiver-Side Control Considering Coupling Disturbance. Electronics. 2021; 10(14):1639. https://doi.org/10.3390/electronics10141639
Chicago/Turabian StyleChen, Kaiwen, Ka Wai Eric Cheng, Yun Yang, and Jianfei Pan. 2021. "Stability Improvement of Dynamic EV Wireless Charging System with Receiver-Side Control Considering Coupling Disturbance" Electronics 10, no. 14: 1639. https://doi.org/10.3390/electronics10141639
APA StyleChen, K., Cheng, K. W. E., Yang, Y., & Pan, J. (2021). Stability Improvement of Dynamic EV Wireless Charging System with Receiver-Side Control Considering Coupling Disturbance. Electronics, 10(14), 1639. https://doi.org/10.3390/electronics10141639