1. Introduction
As a result of the two megatrends of individualization/personalization [
1,
2,
3] and sharing [
4,
5], consumer behavior and the use of products of developed country inhabitants are currently changing dramatically. This poses a major challenge for the development of future products. First, both trends seem to contradict each other in their principles since they demand individualized products, on the one hand, and products optimized for sharing, on the other hand. Second, this represents a shift away from the current development of mass products for private use. Accordingly, a new methodological approach in product development is necessary to meet these apparent contradictions and challenges.
Both trends have in common that they are not driven by the product itself but by the user needs. Therefore, user needs have a key function in the development of future products. The methodology of design thinking [
6] has been dealing with this new approach for a while and has established itself in creative sectors. However, the successful use of design thinking is based on the expertise of the developers. For a systematic and partly automated combination of product development methods, a more profound integration of user needs into existing product development processes is necessary to consider technically complicated products. Thus, the aim must use qualitative and linguistically vaguely defined user needs as input, first, and to minimize the product portfolio despite increased individualization, second. The third aim is to generate product-bounded property descriptions as output for integration into existing product development processes.
Therefore, we suggest a combination of an optimization method, to minimize valid product combinations, and a multicriteria decision-making method to combine qualitative user-need description with a technical product concept description. Thus, we choose a genetic algorithm and fuzzy system whose selection is described in detail in
Section 3.
In current literature [
7,
8,
9,
10,
11,
12,
13], approaches that focus on a combination of genetic algorithms and fuzzy systems are already presented. This literature shows the general possibility of combining the two methods and highlights some potential applications. Nevertheless, their usage for incorporating user needs into technical product development is novel and will be presented within this paper.
One of the major application fields of user-centered product development will be autonomous vehicle (AV) concepts. On the one hand, vehicles are one of the most technical products in people’s everyday lives, and on the other hand, road-bound mobility will change dramatically in the coming decades. The megatrends of autonomous driving and sharing will disruptively impact future vehicles [
5], ([
14], pp. 9–13). Both automation and sharing will impact users’ attitudes toward the vehicle. While automation enables the performance of personal and individual secondary activities by eliminating the driving task [
15], sharing leads to mobility concepts by users abandoning privately owned vehicles [
16].
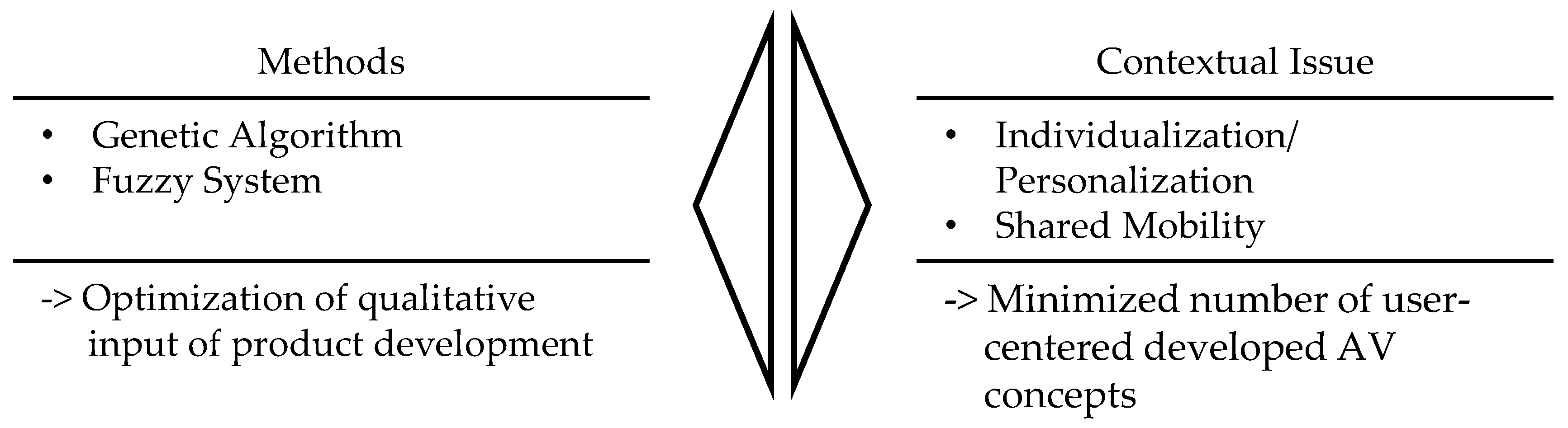
Therefore, in this paper, we start by explaining the optimization of user centricity of products using a combination of a genetic algorithm and a fuzzy system on the contextual issue of AV concepts (
Figure 1).
In
Section 2, we present this contextual issue of AV concept development to introduce the context of our chosen example. In
Section 3, based on the analysis of the contextual issue, we derive the usage of the combination of optimization and a multicriteria decision-making method for user-centered product development and our selection of a genetic algorithm and a fuzzy system.
Section 4 deals with the model we have developed and demonstrates its functionality using an exemplary use case. Lastly, we present and discuss our conclusions on the findings of this paper.
4. Integration of User-Centered Mobility Needs in Autonomous Vehicle Concept Development
In this section, we want to show how we apply the selected methods genetic algorithm and fuzzy system in our contextual issue. To explain the individual steps, we describe our implementation and present the results for each step using a use case delineated later.
We consider three vehicle types (VTs)—privately owned, carsharing, and ridesharing, as described in
Section 2.2. To name them in a commonly used way, we define them as private AV, taxi, and shuttle. This decision is linked to a variety of personal qualitative motives. In any case, an MCDM is required as well. Therefore, we also use a small fuzzy system for this purpose. Thus, the following process runs for every vehicle type.
As discussed in
Section 2.2, the description of a user changes significantly when considering AVs. User groups must be considered due to sharing concepts. Second, the transition from driver to passenger is associated with a focus on secondary activities [
15]. Here, we distinguish the secondary activities of driving, relaxing, working, sleeping, and load with the fifth secondary activity of load included to also allow luggage and logistic applications. This limitation exists in our implementation. Our methodology allows any number of secondary activities.
The needs for secondary activities become the central parameters Np (p = 1, ..., 5) for user description. In the case of the first four secondary activities, we call them the key activities. Due to the possibility of ridesharing, the field of privacy and security needs comes to the fore. Therefore, in the user description, with how many users AMNp (p = 1, ..., 4), we include a secondary activity that may be performed during the ride. The index p relates to the secondary activities Np. For the fifth activity load, this consideration is not necessary.
Following the SINUS-Milieus [
38] and mobility types as defined by Winterhoff et al
. [
39], we describe a user by additional characteristics. We consider the willingness for MaaS C
1, the willingness to invest C
2, and the need for security and safety C
3.
Meurle et al. [
25] describe a customer within the persona method by his specific use of a vehicle. We consider the essential information contained in this description as relevant in the early concept phase and to be the expression of the driving profile. Therefore, we complement the user description and the characteristics of a driving profile. We define the urban (DP
1), rural (DP
2), and highway (DP
3) parts and the general daily demand (DP
4) driving scenarios for this purpose.
We show the two steps from the user description to the vehicle-bound mobility provision toward the customer-relevant properties of AV concepts using a self-defined exemplary use case. As mentioned above, we need to place a user group, instead of just one typical user at the beginning of the described process.
We assume a family consisting of a married couple with a daughter and a son. We assign the family to the adaptive pragmatic and expeditious milieu of the SINUS-Milieus. These are considered open minded toward new technologies and therefore represent the target group of AVs in the early phase [
38]. The father uses the vehicle primarily for riding to work. Accordingly, relaxing and working during this drive is important. For the mother, the fun of driving is in the foreground. For her drive to work, however, a relaxed arrival is also important. Due to the son’s leisure activities, the possibility of driving by himself is important; secondary activities play only a subordinate role. The daughter uses a vehicle only for transportation to school. Accordingly, relaxing or sleeping on the way is important for her. To summarize, the characteristics listed in
Table 1 result from the milieu affiliation and our fictitious description of the use case on a scale of 0–10.
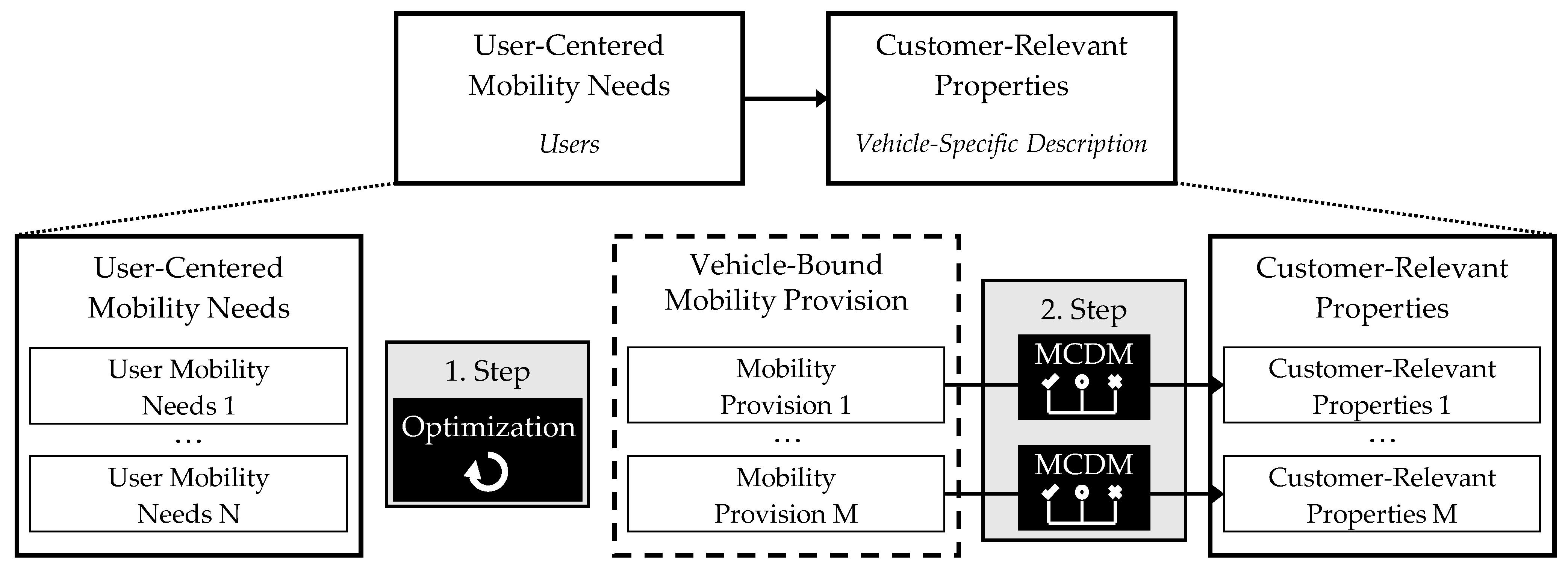
A vehicle-bound mobility provision is created for this user group, and the customer-relevant properties of the associated vehicle concepts are derived in the second step.
Methodologically, the two steps subdivided in
Section 3.1 are supported by genetic optimization and the fuzzy system. To keep the dimensions of the optimization problem manageable, it first must be clarified by using a small fuzzy system whether a user uses his private AV, a taxi, or shuttle for different mobility needs. After this step, each need for secondary N
p activity is linked to a VT. We know which user chooses which VT (private, taxi, or shuttle) for a mobility need to perform the desired secondary activity N
p.
With this knowledge, genetic optimization in the first step of our method is able to determine the required number of vehicles to achieve the desired user fulfillment. We call this proposal and its characteristics vehicle-bound mobility provision. Based on this, we use a fuzzy expert system in the second step to derive the customer-relevant properties of the associated AV concepts. We subsequently show these two main steps in more detail.
4.1. From User-Centered Mobility Needs to Vehicle-Bound Mobility Provision
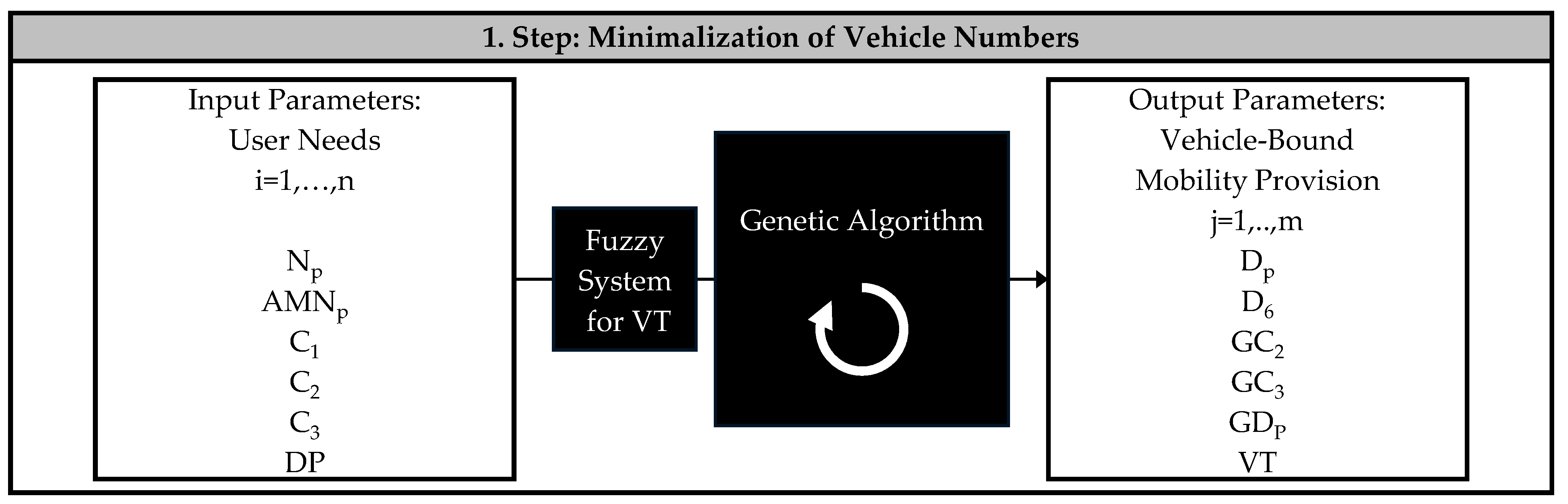
The first step aims to propose the different required derivatives. We call this previous stage of a vehicle concept vehicle-bound mobility provision. We describe this proposal primarily in terms of characteristics of the vehicle interior. This indicates how well various secondary activities are performed in a vehicle. Consequently, a user of the user group is described, on the one hand, by his desire for secondary activities Np and the number of people AMNp in this secondary activity. As described, the five secondary activities considered by us are driving, relaxing, working, sleeping, and load Np (p = 1, ..., 5), and the three additional personal characteristics are willingness to use MaaS C1, willingness to invest C2, and need for security C3. These three characteristics impact the choice of vehicle design and address the hurdles of sharing from the customer’s perspective. Moreover, regarding the customer-valued characteristics, the driving profile DP of a user is decisive.
We describe a derivative proposal j by the global character GC
k,j and the global driving profile GD
p,j of the users of this proposal, in addition to the characteristic of the vehicle interior D
p,j and the number of passenger seats D
6,j. We use the uniform scale from 0 to 10 for the characteristics, only limiting the number of passenger seats D
6,j and the corresponding desire for passengers AMN
p,i to nine people. In summary, the presented input and output variables subsequently result in the first step (
Figure 6).
Below we describe in detail this first step for linking the input parameters shown with the output parameters.
4.1.1. Methodology
As a necessary preliminary element, a fuzzy system is used to link the four key secondary activities N1–N4 with the expected vehicle type VT. As input parameters, this system uses the importance of the secondary activity Np, the number of passengers AMNp, the willingness to MaaS C1, the willingness to invest C2, and the need for safety C3. Qualitative rules are used to determine the choice of vehicle type. The fuzzy system uses 21 rules and represents a necessary preliminary work for genetic optimization. Therefore, we do not show this system in more detail.
Genetic optimization determines the minimum number m of optimal vehicle derivatives based on the n user profiles for a given user fulfillment. From the fuzzy system, we know which secondary activity Np,i of a user i should be satisfied with which vehicle type VT. Therefore, the genetic optimization runs separately for each vehicle expression VT. It is considered that a user uses a private AV and a taxi or shuttle for different trips.
For the mathematical definition of the optimization problem, the decision variables of the vector x must be defined. We use eight decision variables per single vehicle-bound mobility provision; thus, the total number of variables to be optimized is eight times the minimum number of mobility provisions (nx = 8 m). Six of the eight variables are associated with the vehicle derivative and describe, on the one hand, the quality of the secondary activities Dp,j and, on the other hand, the number of passenger seats D6,j of the proposal j = 1, ..., m. The remaining variables of the optimization represent the global investment willingness GC2,j and the global safety need GC3,j of the users of proposal j. The willingness to MaaS of a user is only used for the preliminary element of determining the vehicle type and is therefore not necessary in the optimization. The global driving profile GDPj of a proposal j based on the driving profiles DP of the users is not part of the optimization due to the strongly increasing dimensionality (+4) but is determined via minimum squared distances according to the users, which are assigned to the considered vehicle.
The decision on the number m of vehicles is made iteratively. Based on the user fulfillment FF
i of each user i by the optimized vehicle-bound mobility provision with m vehicles, the number m is iteratively increased until the following condition is satisfied:
The user fulfillment averaged over all users must be greater than or equal to a given user fulfillment FFwish. If this condition is not met, the number m is increased by one, and the optimization is restarted. We show the calculation of user fulfillment in detail below.
Calculation of the User Fulfillment
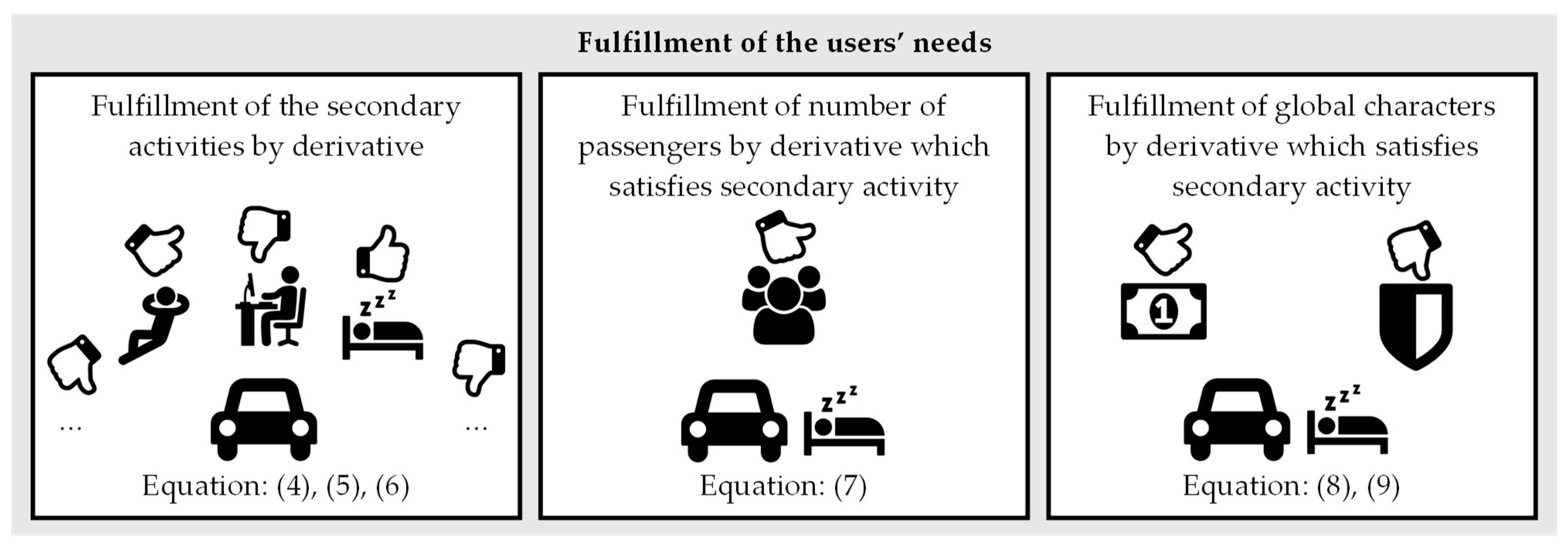
The user fulfillment FF
i of a user by the vehicle-bound mobility provision is composed of three quantities (
Figure 7). The fulfillment of the secondary activities N
p,i by the quality of the secondary activities D
p,j of the flock of derivatives m is measured by FF
i,N. The match of the number of passenger seats D
6,j with the desired number AMN
p,i is denoted by FF
i,AMN. In addition, user fulfillment includes the match of the global characteristics GC
2,j and GC
3,j with those of the associated users C
2,i and C
3,i. This match is denoted by FF
i,C2 and FF
i,C3. In general, it is important to consider whether a derivative j satisfies user i in a secondary activity N
p,i in the calculation. Therefore, an assignment of the users to the derivatives proposed by the optimization forms the basis.
To compute the individual terms of user fulfillment FF
i of user i, we first show the computation of some auxiliary quantities in matrix notation. The quantity ff
i,jp measures how well the wish of secondary activity N
p,i of the user i is satisfied through the derivative j with the expression of the interior D
p,j.
To weight under- and over-fulfillments of the characteristics differently, f
w is a weighting function. The quantities ff
gc,jk for k = 2,3 is required to calculate the proportions FF
i,Ck from the character features. If derivative j best satisfies user
i in one of the secondary activities N
p,i among all m derivatives, the character features C
k,i are compared with the global features GC
k,j of the derivative.
Using these quantities, the proportions of user fulfillment FFi of user i by the vehicle-bound mobility provision, consisting out of m derivatives, can be easily calculated.
The proportion of user fulfillment FF
i,N from the secondary activities is calculated as the average over all of the five secondary activities
p of the maximum values over the derivatives j since only one derivative has to fulfill the wish N
p,i.
To calculate the proportion FF
i,AMN, first, the derivative j is determined that best satisfies user
i in the secondary activity N
i,p. Its characteristic D
6,jpmax is used for the comparison. The fulfillment results as an average value over the four central secondary activities.
The proportion of user fulfillment from the character features FF
i,Ck is calculated using the quantity ff
gc,jk. Therefore, all derivatives j that have an entry in ff
gc,jk greater than zero are used.
Condition (10) is checked based on the individual proportions of user fulfillment. If this is not fulfilled, the number m is increased by one and the optimization runs again. It has been shown that user fulfillment alone is not sufficient as a fitness function of the proposed genetic optimization. We, therefore, show the setup of these in more detail below.
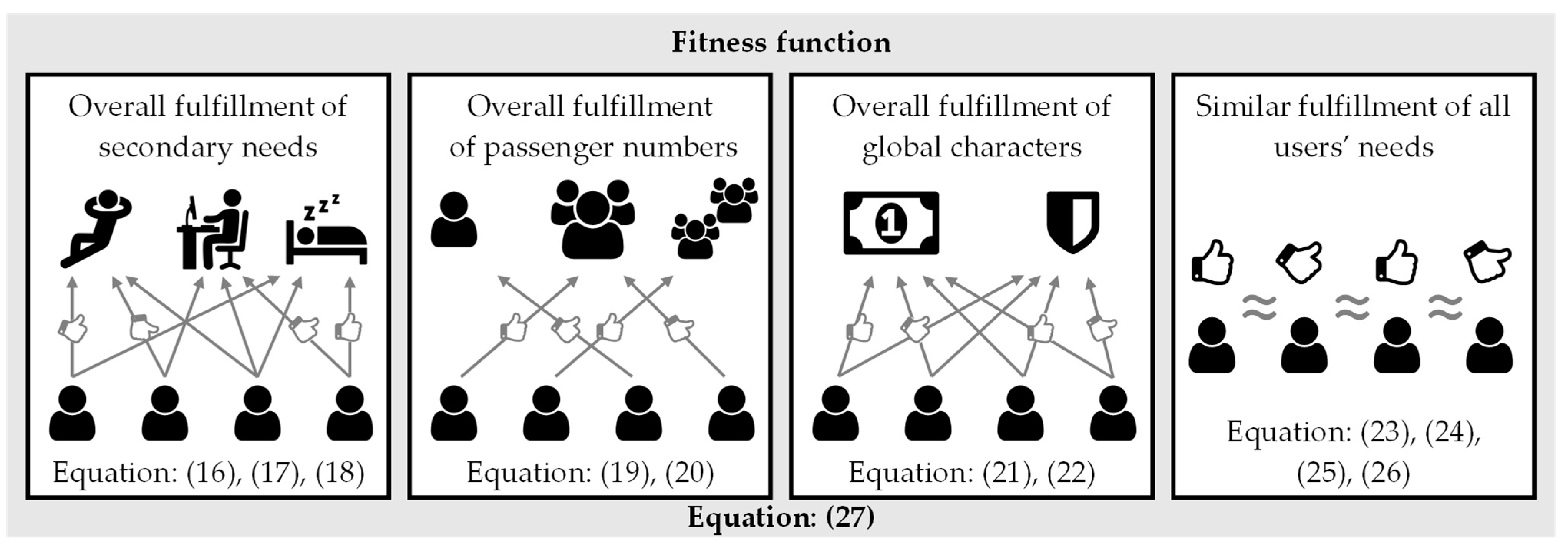
Calculation of the Fitness Function
The fitness function consists of four parts: the overall fulfillment of the users’ secondary needs, the overall fulfillment of the desired number of passengers per secondary activity by the users, the overall fulfillment of users’ global character, and a similar fulfillment of the different users’ needs (
Figure 8).
For the calculation of the fitness function, some auxiliary variables are also calculated. The matrices f
ip and ID
j,ip contain the information which derivative j best satisfies the user
i in the secondary activity N
p,i.
The matrix AMN
ip,j stores the wish for additional seat places AMN
p,i of user i at the secondary activity N
p,i if derivative j best supports secondary activity N
p,i among all derivatives m.
The two-character features share in fitness function. In the two matrices C
k,ji (k = 2,3), the expression of the character feature C
k,i of user i is stored if derivative j best supports user i in one of the secondary activities N
p,i.
With the help of these quantities, the fitness function is calculated. Thereby, the decision vector x is divided into m vehicle-bound mobility provisions with dim(x) = 1 × 8 m.
The fitness function of the proposed genetic optimization is composed of four parts. The first part F
N(x) addresses the users’ wish for secondary activities and, correspondingly, the offer to exercise them in the derivatives. Therefore, we calculate the deviation devND
ip,j between the wish and associated expression of the interior of the derivative. We weigh this by the user’s willingness to invest, giving more weight to users with a higher willingness to invest.
Since only one derivative must satisfy the user in the exercise of the secondary activity, we form the product F
ip over the derivatives j. If one derivative satisfies the user perfectly, this product disappears, and this part of the fitness function becomes minimal.
For the part in the fitness function, the values F
ip are summed over all secondary activities p and users i.
The second part of the fitness function ensures the optimal number of seats D
6,j of a derivative j based on the customer’s desired AMN
p,i depending on the secondary activity. This is carried out by relying on the auxiliary variable AMN
ip,j, which contains the desired number of passengers AMN
p,i of user i if derivative j best supports secondary activity N
p,i. The maximum number of desired passenger seats placed over all users of derivative j enters the fitness function.
The third part of the fitness function consists of the character features of the corresponding users. We calculate the deviation between the characteristics of the individual users C
k,i and the global characteristics of the vehicle-bound mobility provision GC
k,j.
We include user fulfillment as the fourth part of the fitness function. We can use this to ensure that users are similarly well satisfied as measured by their willingness to invest. The calculated user fulfillment takes the following form:
In this part of the fitness function (Equation (25)), we include both the individual terms of user fulfillment and the averaged value.
The proportion of the fitness function F
ff(x) is then calculated by summing over all users i.
The fitness function
of genetic optimization is composed of the four parts shown.
Via the weight wff, the proportion that leads to a weighted equal fulfillment of the users can be weighted strongly. To ensure the feasibility of the vehicle concepts resulting from the vehicle-bound mobility provision, the solution space must be constrained. For this, we use several constraints.
Introduction of the Constraints
We divide constraints into balanced constraints C
eq(x) and unbalanced constraints C
ueq(x). As a balanced constraint, we specify that human driving is not possible in an autonomous shuttle, which is assumed due to the expected low price and higher number of passenger seats.
For faster convergence of the optimization, we use another balanced constraint that avoids non-essential vehicle interior expression.
In addition, we use three unbalanced constraints that primarily ensure the feasibility of the resulting vehicle concepts. The first unbalanced constraint is to limit the expression of the vehicle interior. It is hardly possible to realize a very high sleeping comfort and at the same time a high expression of the interior space in order to be able to work. Therefore, we limit the sum over the different interior expressions to a maximum of 10. Depending on the requirements of an automotive manufacturer, higher values are also conceivable.
With regard to the characteristic of the load space D5,j of a derivative, we propose a distinction. If the derivative is primarily optimized for load (logistics), the characteristic is included in the calculation of the sum. If, however, load matters subordinately, the characteristic is excluded from the condition in order to be able to provide a specific amount of luggage space in each vehicle concept if the assigned users express this as a wish.
The second unbalanced constraint C
ueq,2 also concerns the feasibility of a solution. This constraint ensures that a maximum vehicle interior size R
max(VT) is not exceeded due to an excessive number of passenger seats. The maximum available interior size depends on the vehicle type VT and is defined in the three spatial directions,
The available vehicle interior size is contrasted with the space required to perform the secondary activities. For this purpose, we scale the space requirement per passenger R
pp,j via the characteristic D
p,j and the global willingness to invest of the users GC
2,j of the derivative
j.
We derive the limit values for this from vehicle and aircraft interior dimensions. For each of the three spatial directions, the maximum value is selected via the characteristics D
p,j. The required space R
req,j can be determined via the number of passenger seats and the seat topology. The second unbalanced constraint C
ueq,2 is then obtained by subtracting the maximum available vehicle interior space.
We use a third unbalanced constraint Cueq,3 to reduce the search space and increase the convergence speed. The minimum values, excluding zero, of the vehicle-bound mobility provision are not to be less than the minimum values of the characteristic expressions of the user group. Similarly, the maximum values of the vehicle-bound mobility provision features are bounded by the maximum values of the user features.
In addition to the eight optimized features (interior space Dp,j, number of passenger seats D6,j, and global character features GCk,j), we describe a vehicle-bound mobility provision by the global driving profile. This is obtained as the minimum squared distance to all users assigned to the considered vehicle. We describe the driving profile by the city, rural, and highway fractions, and the level of overall mobility demand. This is also scaled up from 0 to 10.
4.1.2. Vehicle-Bound Mobility Provision of the Use Case
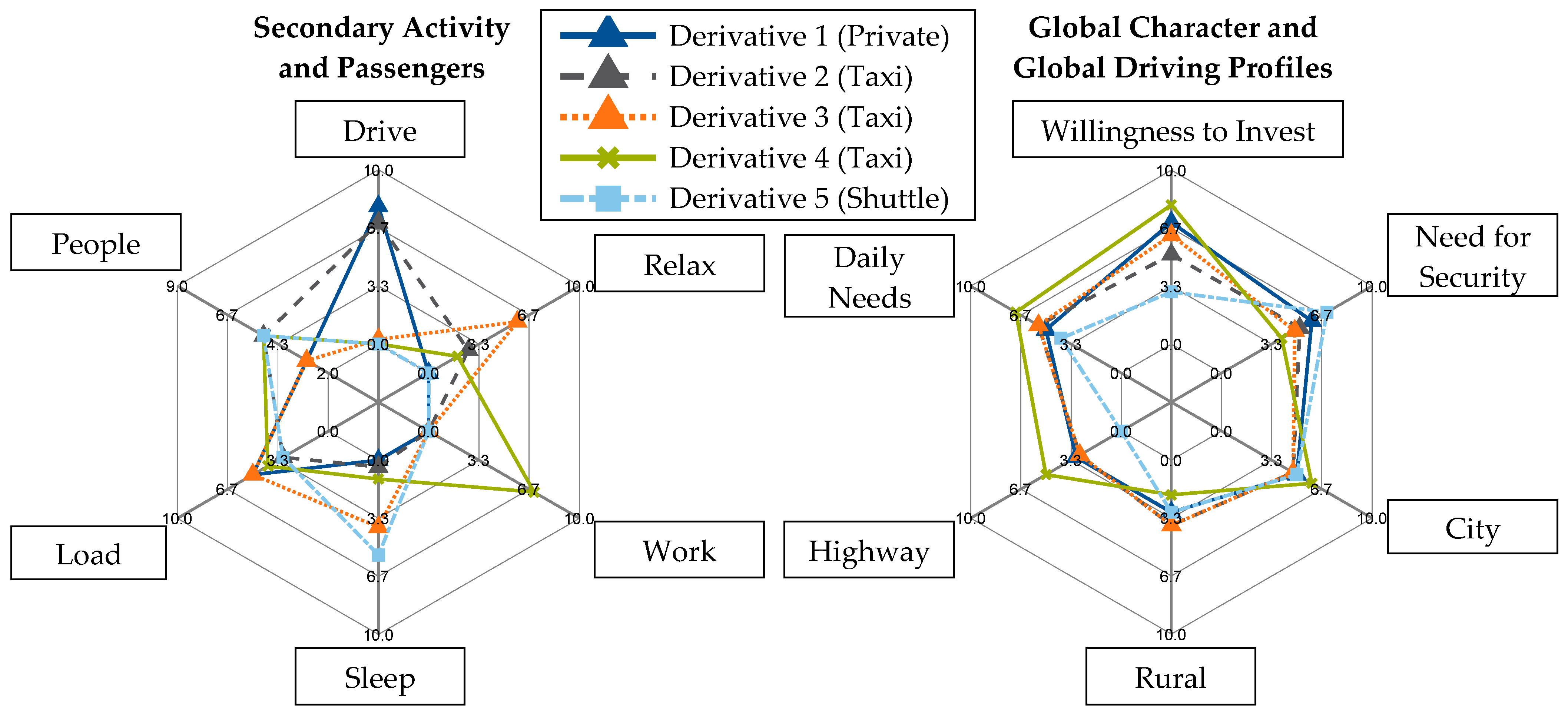
For our use case, we set the desired user fulfillment of 75%. On this basis, a fuzzy system and genetic optimization determine the number and characteristics of the vehicle-bound mobility provision. As a result, we obtain five different vehicles for the considered family. Among them, one derivative is expressed as a private AV, three as a taxi, and one as a shuttle. The mother will choose a private AV for fun trips due to her affinity for automobiles, high willingness to invest, and her skepticism toward MaaS. The daughter will use a shuttle for simple trips due to her low willingness to invest. The whole family, however, will favor autonomous taxis with corresponding characteristics for specific trips.
Figure 9 shows the vehicle-bound mobility provision based on the user group considered.
As previously mentioned, Derivative 1 is designed as a private AV and primarily for self-driving. It is striking that Derivative 2 is almost identical to Derivative 1 if we look at
Figure 9. This derivative was designed based on the son’s wishes. In the case of a family, the son can use the vehicle of the mother (Derivative 1). However, this is not possible for independent user groups, and hence, the solution seems plausible. The third proposal (Derivative 3) fulfills the desire to relax, while the fourth derivative was designed for working during a trip.
The use case also shows that a user uses different vehicles and, conversely, that a vehicle is also used by many different users.
Figure 10 illustrates this, showing the possible secondary activities and the seats for people for this secondary activity.
It is evident that two ideal vehicles need to be developed for the father. Depending on his secondary activity, he will either use Derivative 3 or Derivative 4. Derivative 3 illustrates that one derivative is used by several users. The third proposal was designed to meet the needs of all users considered and contribute to their satisfaction.
The vehicle-bound mobility provision represents a design that can be adapted by the concept engineer. This intermediate module is then used to derive the customer-relevant properties for the associated vehicle concepts. We show this in the next section, first in theory and then exemplary for the use case discussed here.
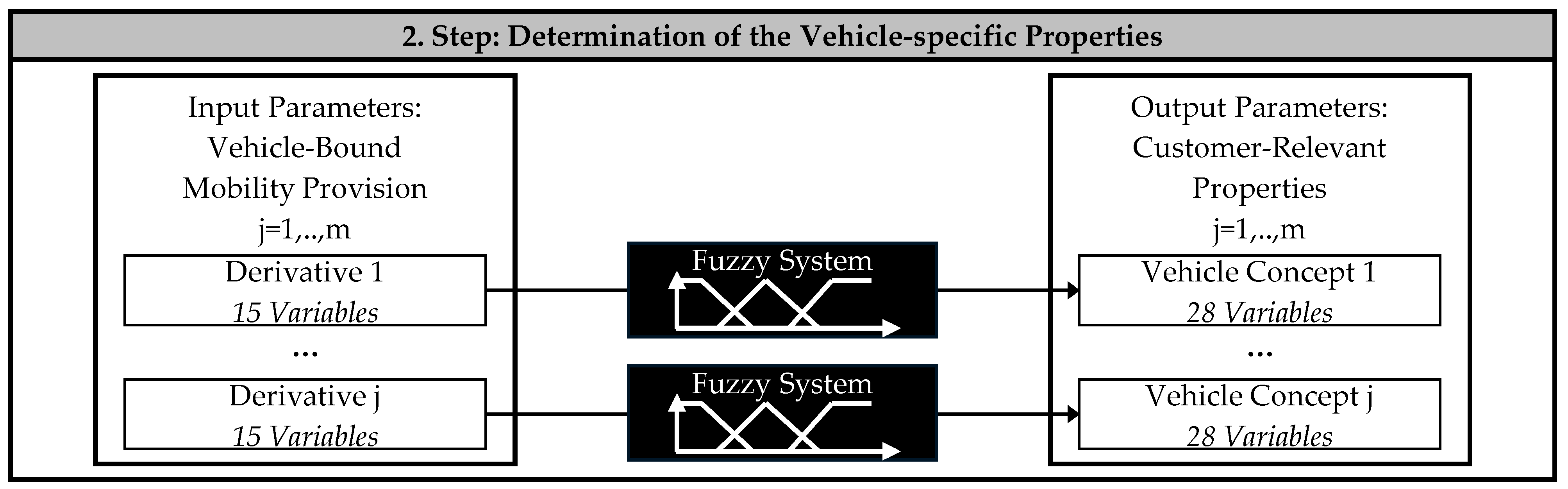
4.2. From Vehicle-Bound Mobility Provision to Customer-Relevant Properties
The customer-relevant properties of AV concepts can be derived from user descriptions using the vehicle-bound mobility provision. In the second step, we use a fuzzy expert system to link the characteristics of a vehicle-bound mobility provision with the customer-relevant properties of AV concepts.
Figure 11 illustrates this process.
To detail this process, we first show the theory of the fuzzy expert system and then the application to the exemplary use case.
4.2.1. Methodology
We have defined the input and output variables of the fuzzy expert system. The known features of the vehicle-bound mobility provision served as input variables. For linguistic description, we used three to four fuzzy sets. The input variables are described in
Table 2.
The output variables represent the customer-relevant properties of an AV concept. Based on the overall vehicle properties defined by Schockenhoff et al
. [
15], we proposed a total of 28 customer-relevant properties at the specification level by adapting existing customer-relevant properties [
23,
40,
41] and adding new properties through studies and reports ([
42], p. 13), ([
43], p. 14), ([
44], p. 18), ([
45], p. 8), ([
46], p. 64). These are described in
Table 3.
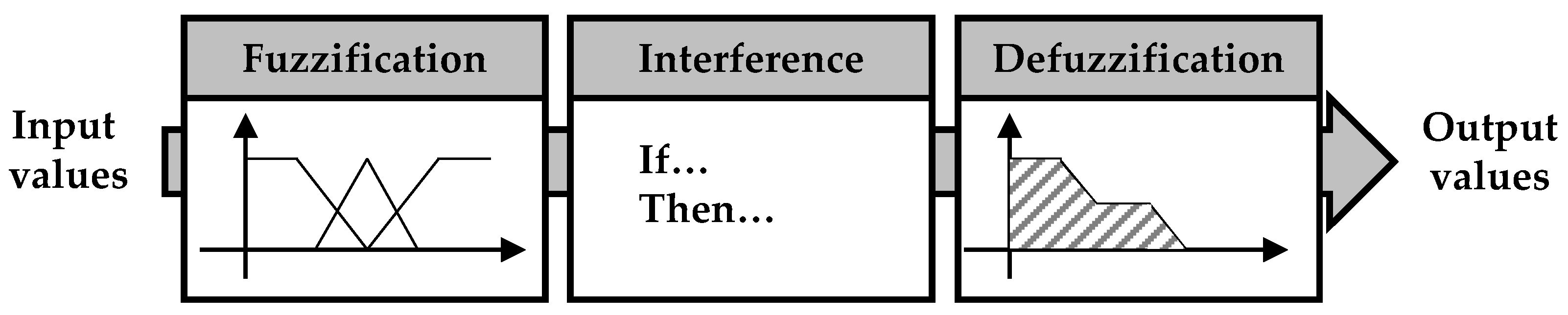
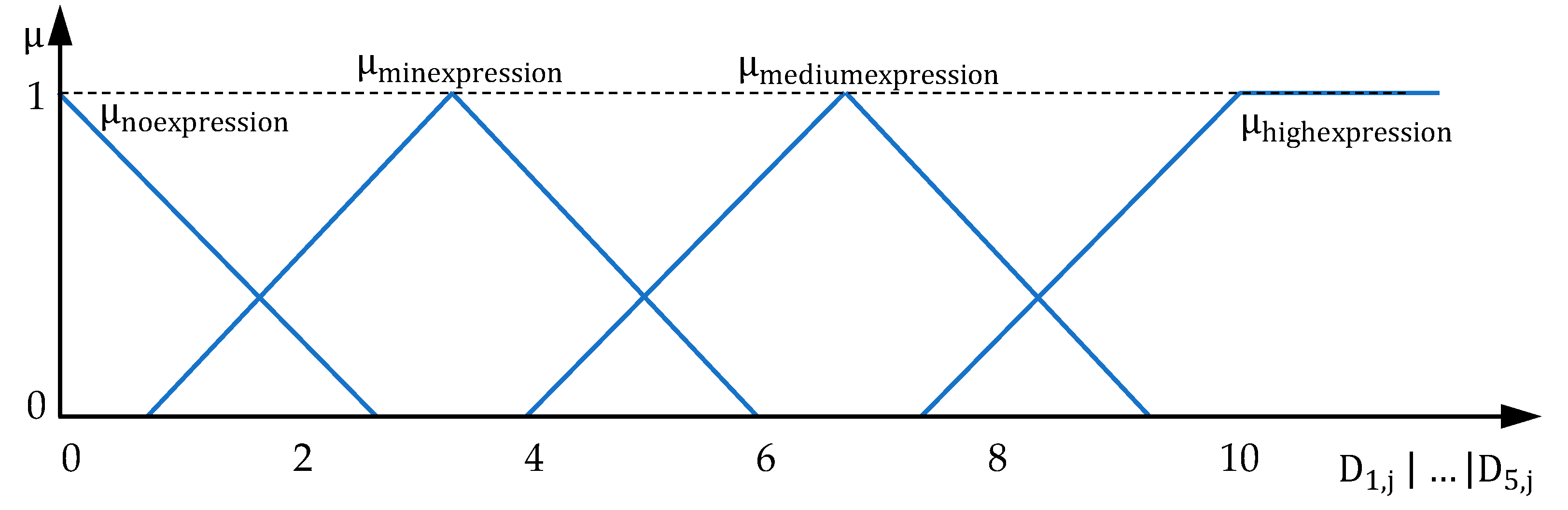
The input and output parameters were fuzzified. For this purpose, the membership functions of the fuzzy set were defined. Following the argumentation of Schröder [
47], we used triangular functions for simplified interpretation.
Figure 12 shows the fuzzification for an input parameter.
The core element of a fuzzy system is its rule base. This rule base links the input parameters with the output parameters in the form of qualitative IF... THEN... relationships. On the one hand, this rule base can be established by a literature review. However, in this study, we propose entirely new, partly unknown characteristics of a vehicle-bound mobility provision and customer-relevant properties of AV concepts.
We have used an expert survey to establish the rule base. In this survey, 14 experts from science and industry participated. All of them work in a specific field of our rules. We asked ergonomic experts for the anthropometric geometrical parameters of the interior and human machine interface (HMI) experts for the parameters coupled to infotainment and entertainment. Moreover, future e-mobility experts were surveyed about the general aspects and vehicle dynamic experts for the vehicle behavior. Most of the experts from the science fields work in the research project UNICARagil [
48], in which they build self-driving vehicles. All experts together established 538 rules linking the 14 input parameters to 28 output parameters. On a scale of 0–5, the experts rated their knowledge in the concept development of AVs at 3.92.
For the implementation of the fuzzy expert system, we used the MATLAB Fuzzy Logic Designer. The first task was to choose the type of fuzzy system. The Mamdani system is well suited for human input and is the foundation of many industrial applications [
49]. Therefore, we also used the Mamdani system. For rules with multiple premises, the second task was to specify the mathematical operators of the AND and OR relations. We followed Lee [
50] and used the product operator for the AND operation and the maximum operator for the OR operation.
If several rules led to the same statement, the different degrees of membership of this one fuzzy set had to be merged. This task is called implication. For fuzzy expert systems, the choice of the product operator was proposed [
50]. The aggregation followed the implication. We chose the maximus operator as the operator [
51]. The final choice was the defuzzification method. We followed the recommendation of Mathworks [
52] and used the most used centroid method.
In the following section, we will show the second step in the development of the customer-relevant properties of AV concepts in a potential application. The input is the vehicle-bound mobility provision shown for the use case described above.
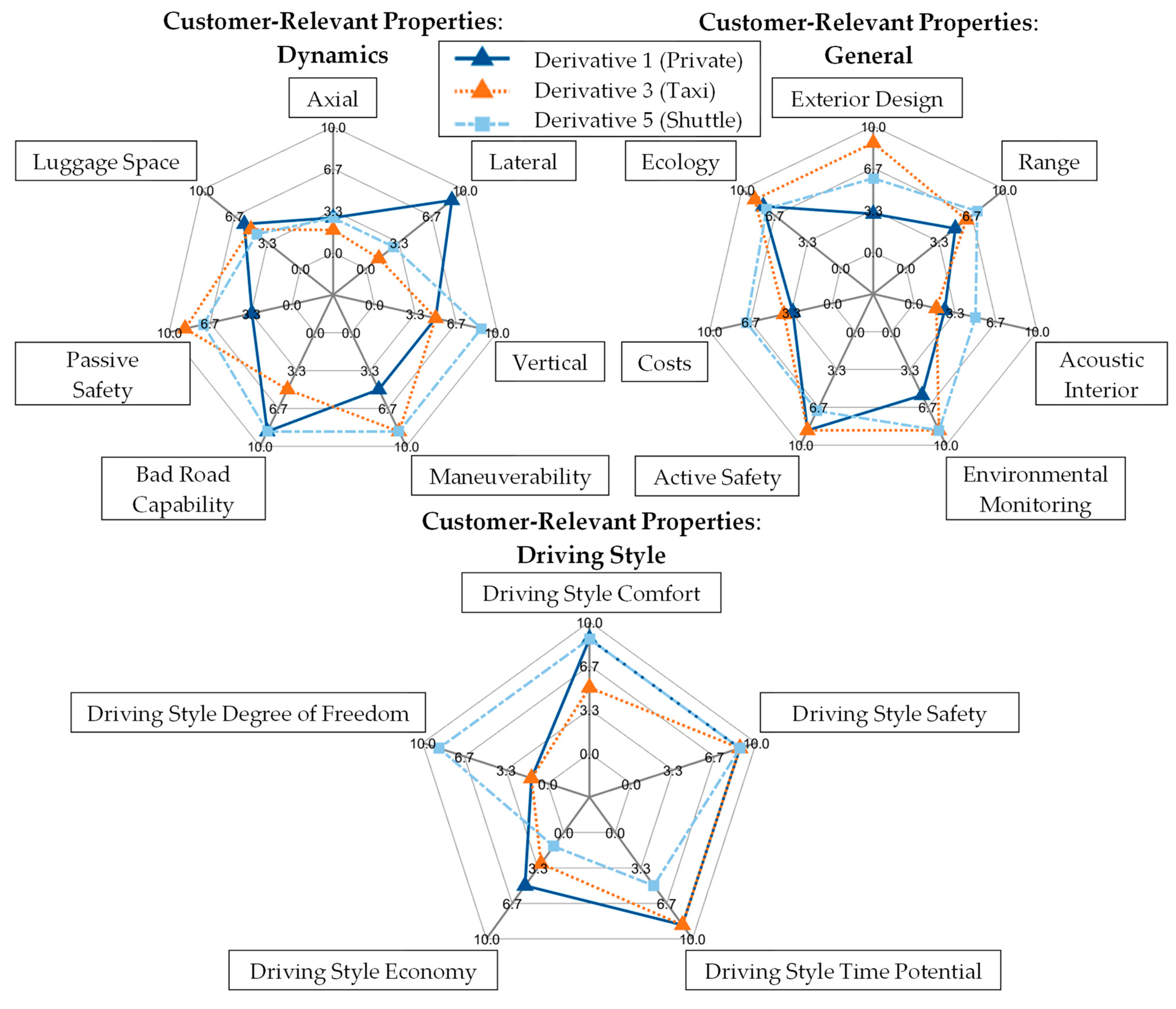
4.2.2. Customer-Relevant Properties of the Use Case
The output variables of the fuzzy expert system represent the customer-relevant properties of the AV concept. In the following, as an example, we consider property field dynamics, general and driving style of Derivatives 1, 3, and 5 of the previously optimized vehicle-bound mobility provisions. All customer-relevant properties are expressed on a uniform scale from 0 to 10 due to their solution-neutral formulation.
Figure 13 shows the distinct properties of the private AV, the taxi, and the autonomous shuttle.
The customer-relevant properties of dynamics address driving behavior. In the lateral dynamics, the private AV concept for the secondary need driving has a high value whereas the taxi for relaxing and the shuttle for sleeping indicate a low one. The characteristics of the longitudinal dynamics are generally low. The values for lateral dynamics seem plausible, while a higher expression would be expected for longitudinal dynamics of the private AV. For AVs, the quality of the vertical dynamics can generally be classified as higher. The difference between the taxi for relaxing and the shuttle for sleeping seems plausible regarding the secondary activity, although taxis expect a higher level of vertical dynamic than shuttles. The levels of passive safety seem appropriate. The changed seating or lying positions of the passengers due to the secondary activities of relaxing and sleeping require these higher expressions in the taxi and shuttle.
In the general characteristics, the higher expression of the exterior design of the taxi, compared to the shuttle, seems plausible. However, the low salience of the private AV does not match our expectations. The high expression of the environmental monitoring of the taxi and the shuttle is expected due to the permanent autonomous operation. The interior acoustic is the highest in the shuttle for the secondary activity sleeping and the lowest in the taxi. Regarding an expected ranking of good acoustics for private AV and worse for shuttles and good acoustics for sleeping and worse for driving, this seems a fitting result in its interactions.
The driving style of the three vehicles also differs. The driving style of the private AV can be neglected since in manual driving the driver specifies it and the shown driving style is therefore exclusively relevant for the subordinate secondary activity of relaxing. The comfort of the driving style of the shuttle is very high due to the intended secondary activity of sleeping, while in terms of time potential, the shuttle has a significantly lower characteristic than the taxi. This is plausible for a ridesharing vehicle. The only questionable property is the very high value of the degree of freedom of the shuttle’s driving style. This characterizes the possibility to change the driving style, and a shuttle is unlikely to allow adaptivity of the driving style by the user.
5. Discussion
We have shown that future products can be developed based on the needs of their users. Methodologically, this requires the optimization of qualitative, differing input and output variables. While the input variables define user needs, the output variables must describe the required product-related properties. This methodological challenge is solvable by combining a genetic algorithm and a fuzzy system.
We have presented the method on the example of AV concepts. We have highlighted that future mobility solutions satisfy more than just the need for mobility by offering feasible secondary activities and have shown that these user requirements must become part of the development process of AV concepts. The presented methodology integrates user groups and their needs into the vehicle concept development process. Thus, it is possible to design vehicle concepts for a private person using personas and to also optimize vehicle fleets for user groups. Regarding MaaS offerings with AV fleets, this possibility is essential for user-oriented vehicle concept development.
Thus, the performed example demonstrates that our method works and contributes to the development of future products in the context of individualization/personalization and sharing.
Nevertheless, our implementation has weaknesses. Both fuzzy systems would have to be integrated into the optimization in order to optimize the vehicle-specific output variables. Thus, the optimal vehicle fleet would be directly derivable in vehicle-specific variables for given user needs. However, we opted for a sequential, rather than an integrated, linkage of the process steps. Since we are integrating user needs of autonomous mobility into the vehicle concept development process for the first time, we want to obtain process knowledge with an intermediate module. This is the way we ensure the plausibility of the results. At a later stage in a potential industrial application, the small fuzzy system of the first step should be removed and the selection of the vehicle type should be part of the optimization. Furthermore, the integration of the huge fuzzy system of the second step into the optimization should be examined.
Focusing on the results, the fuzzy system presented and discussed in
Section 4.2.2. still do not seem to be completely plausible. We attribute this to the rule base. Since the experts are surveyed about a future topic, different considerations inevitably arise during rule generation ([
53], p. 27). Hence, the fuzzy system seems to be the appropriate method since it averages and combines different statements. Nevertheless, expert validation with analytically defined scenarios is necessary to highlight important rules by weighting them [
36]. If possible, the number of rules should not be increased to preserve the interpretability of the model and its results [
54]. Furthermore, the results are dependent on the required level of fulfillment of the user needs, which is the termination criteria of the optimization. Therefore, our results are only an example and in a potential industrial application, the required level of fulfillment of the user needs must be purposefully chosen.
The key advantage of our approach is integrability into existing product development processes, e.g., vehicle concept development processes. Thus, an existing, well-functioning process is transformed by our method from a customer-oriented to a user-oriented approach. Although adaptations in the individual process are necessary for the development of AVs [
17], only adding the presented method enables a user-centered development of AV concepts.
6. Conclusions and Outlook
Driven by the megatrends of individualization/personalization and sharing, we have identified the demand for a change from customer-oriented product development for private ownership to a user-centered approach using user group needs for a sharing society. Using the development of AV concepts as an example, we have illustrated this problem.
For this purpose, we designed a method that combines a genetic algorithm and a fuzzy system. On the one hand, this enables the minimization of the required product variants while satisfying the user needs, in our example, the AV concepts in the fleet, and, on the other hand, transfers variables of the user needs into product-related ones. Thus, our methodological approach will support the future user-centered development of products.
This paper includes an exemplary use case of designing a fleet of AVs for a family of four and their heterogeneous mobility needs. This use case illustrates the shift from conventional vehicle concept design, in which one vehicle must meet all of a customer’s needs. All family members use multiple vehicle concepts, mostly via MaaS offerings, to fully satisfy their mobility needs.
With the application to this use case, we demonstrate the functionality for a technically complex, future product represented by AV concepts. The transfer of the methodological approach to other products is still pending but should be easily feasible.
Therefore, further research should focus on adapting the methodological approach to other future products. This will improve the method and underline its strengths.
For our example of AV concepts, the validation of the rule base of the fuzzy system should be performed. Based on this, an overall system validation can be performed to verify the interaction of the genetic algorithm and the fuzzy system.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}