
Foreground and Background Components in Separable Complex Systems


{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
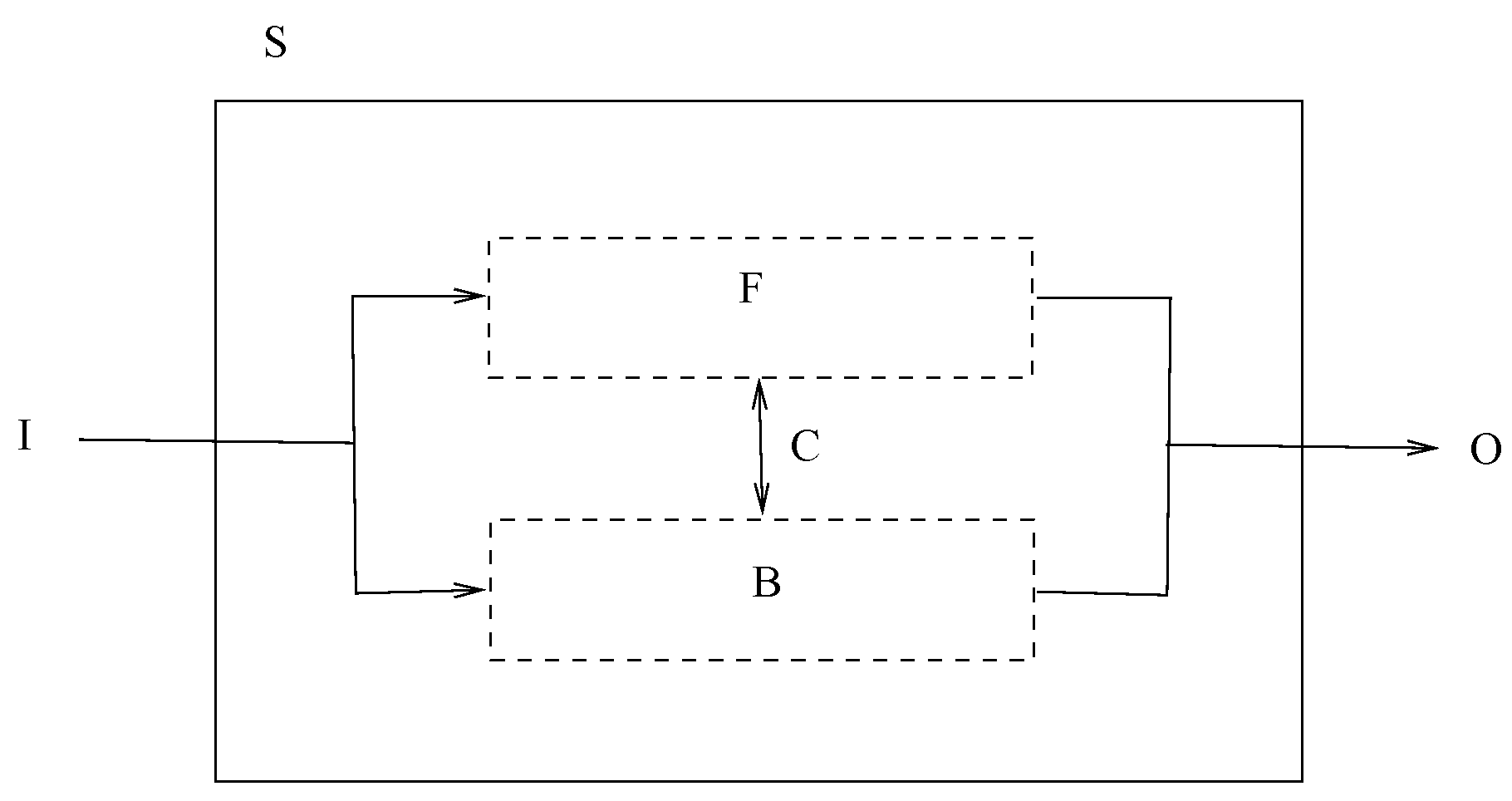
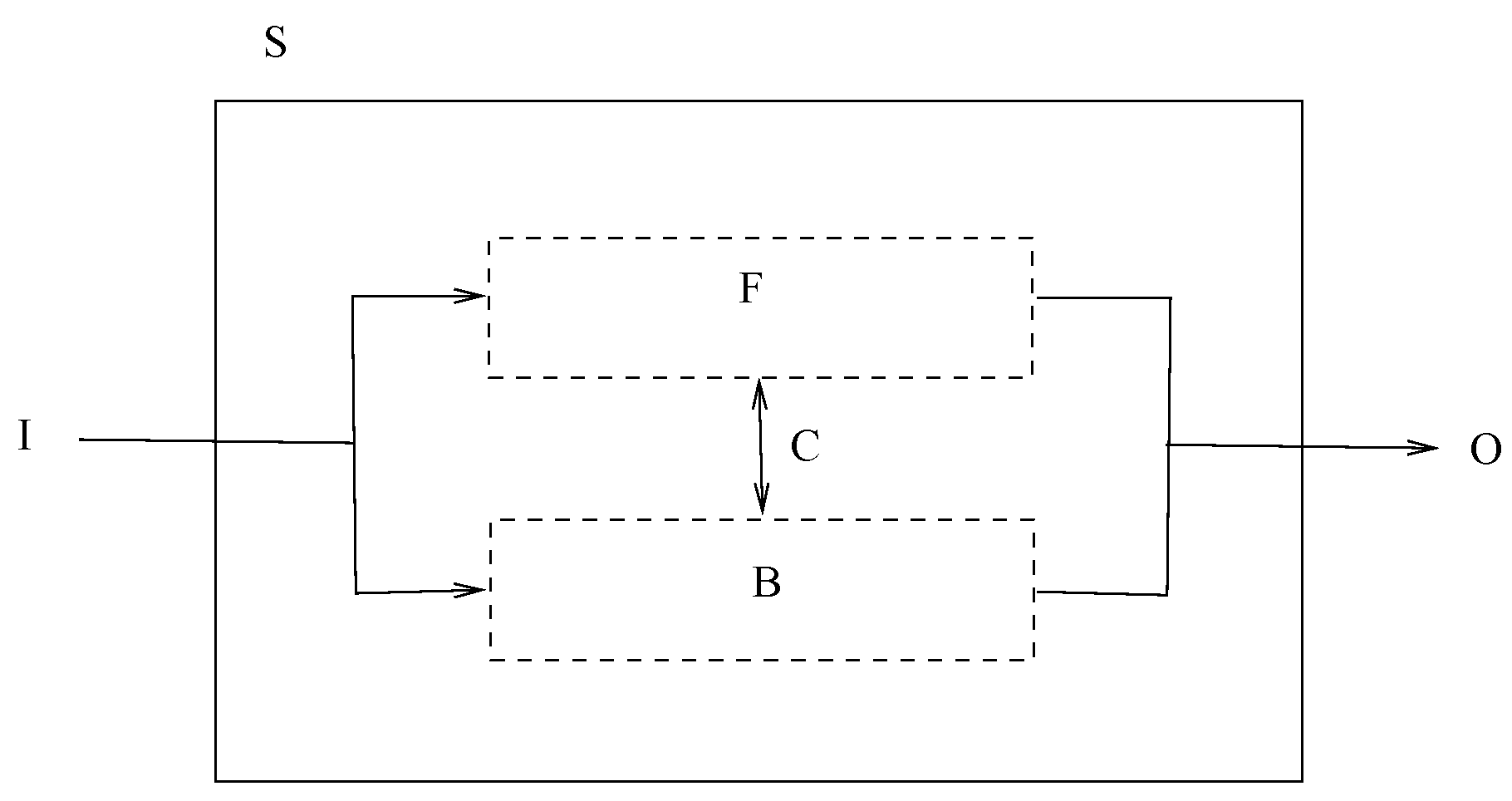
2. System Separation
2.1. Foreground Subsystem
2.2. Background Subsystem
2.3. Coupling
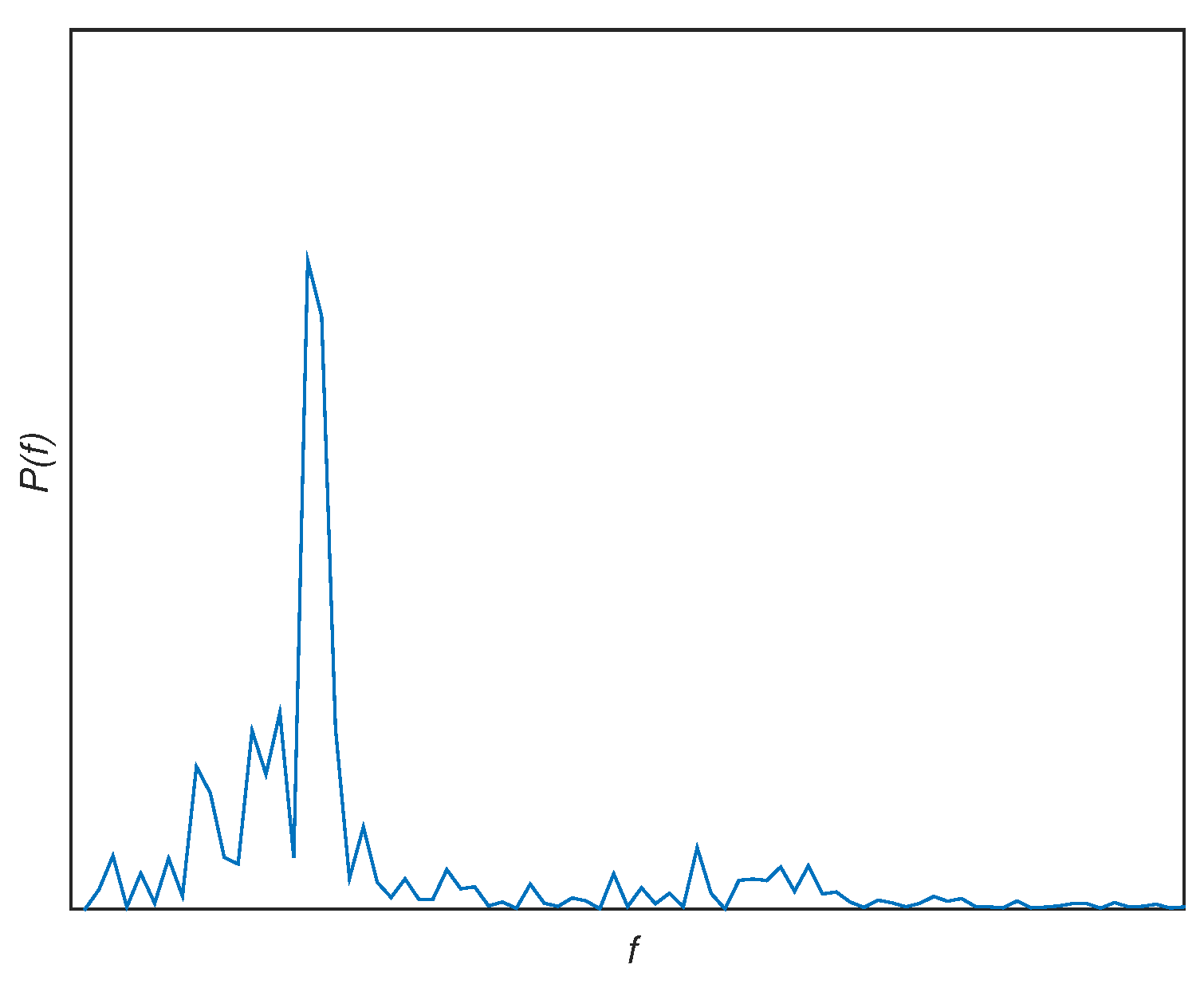
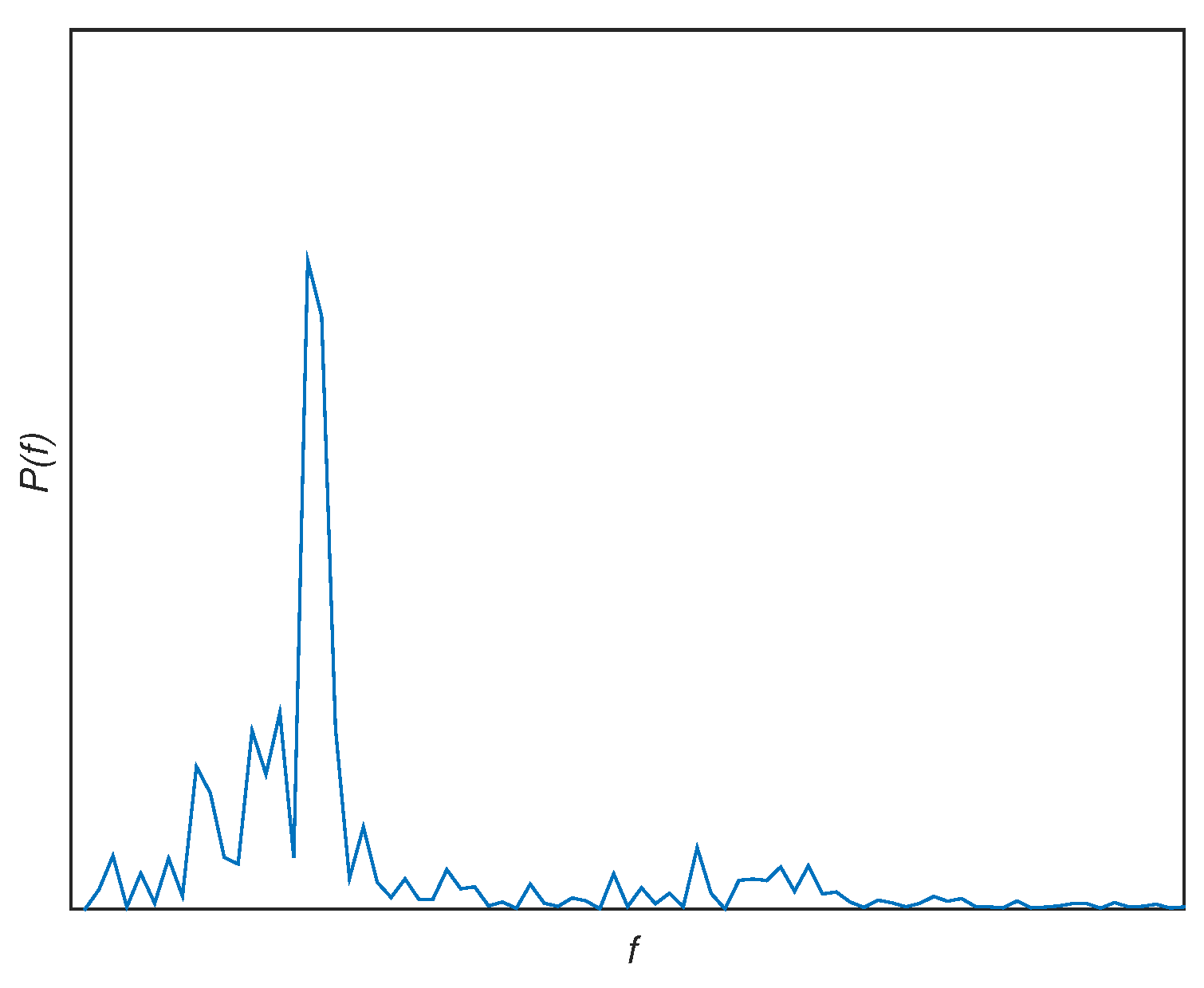
3. Data Analysis
4. Conclusions
Conflicts of Interest
References
- Jáuregui-Correa, J.; López-Cajún, C.; Sen, M. Analysis of experimental data from complex multibody system. In Multibody Mechatronic Systems; Ceccarelli, M., Hernandez, E., Eds.; Springer: Cham, Switzerland, 2015; pp. 211–218. [Google Scholar]
- Rakheja, S.; Stiharu, I.; Zhang, H.; Boileau, P.E. Seated occupant interactions with seat backrest and pan, and biodynamic responses under vertical vibration. J. Sound Vib. 2006, 298, 651–671. [Google Scholar] [CrossRef]
- Liu, B.; Riemenschneider, S.; Xu, Y. Gearbox fault diagnosis using empirical mode decomposition and Hilbert spectrum. Mech. Syst. Signal Process. 2006, 20, 718–734. [Google Scholar] [CrossRef]
- Watkins, S.; Oswald, G. The flow field of automobile add-ons–with particular reference to the vibration of external mirrors. J. Wind Eng. Ind. Aerodyn. 1999, 83, 541–554. [Google Scholar] [CrossRef]
- Čudina, M.; Prezelj, J. Detection of cavitation in situ operation of kinetic pumps: Effect of cavitation on the characteristic discrete frequency component. Appl. Acoust. 2009, 70, 1175–1182. [Google Scholar] [CrossRef]
- He, S.; Zi, Y.; Chen, J.; Zhao, C.; Chen, B.; Yuan, J.; He, Z. Incipient-signature identification of mechanical anomalies in a ship-borne satellite antenna system using an ensemble multiwavelet. Meas. Sci. Technol. 2014, 25. [Google Scholar] [CrossRef]
- Avendaño-Valencia, L.D.; Fassois, S.D. Stationary and non-stationary random vibration modelling and analysis for an operating wind turbine. Mech. Syst. Signal Process. 2014, 47, 263–285. [Google Scholar] [CrossRef]
- Hamakawa, H.; Fukano, T.; Nishida, E.; Satou, Y. Flow induced acoustic resonance in in-line tube banks. J. Therm. Sci. 2006, 15, 226–232. [Google Scholar] [CrossRef]
- Lie, H.; Kaasen, K. Modal analysis of measurements from a large-scale VIV model test of a riser in linearly sheared flow. J. Fluids Struct. 2006, 22, 557–575. [Google Scholar] [CrossRef]
- Snarski, S. Flow over yawed circular cylinders: Wall pressure spectra and flow regimes. Phys. Fluids 2004, 16, 344–359. [Google Scholar] [CrossRef]
- Crutchfield, J.; Farmer, D.; Packard, N.; Shaw, R.; Jones, G.; Donnelly, R. Power spectral-analysis of a dynamical system. Phys. Lett. A 1980, 76, 1–4. [Google Scholar] [CrossRef]
- Cai, W.; Sen, M.; Yang, K.; McClain, R. Synchronization of self-sustained thermostatic oscillations in a thermal-hydraulic network. Int. J. Heat Mass Transf. 2006, 49, 4444–4453. [Google Scholar] [CrossRef]
- Jáuregui, J.C.; Sen, M.; López-Cajún, C.S. Experimental characterization of blade vibration synchronization. In Proceedings of the ASME Turbo Expo: Turbine Technical Conference and Exposition, Vancouver, BC, Canada, 6–10 June 2011.
- González-Cruz, C.; Jáuregui-Correa, J.; López-Cajún, C.; Domínguez-González, A.; Sen, M. Experimental analysis of synchronization and dynamics in an automobile as a complex system. Mech. Syst. Signal Proces. 2015, 60–61, 472–484. [Google Scholar] [CrossRef]
- Sekar, P.; Narayanan, S. Chaos in mechanical systems—A review. Sadhana 1995, 20, 529–582. [Google Scholar] [CrossRef]
- Feng, Q.; Pfeiffer, F. Stochastic model on a rattling system. J. Sound Vib. 1998, 215, 439–453. [Google Scholar] [CrossRef]
- West, B.; Bologna, M.; Grigolini, P. Physics of Fractal Operators; Springer: Berlin, Germany, 2003. [Google Scholar]
- Zinovyev, A. Overcoming Complexity of Biological Systems: From Data Analysis to Mathematical Modeling. Math. Model. Nat. Phenom. 2015, 10, 186–206. [Google Scholar] [CrossRef]
- Shang, Y. Finite-time consensus for multi-agent systems with fixed topologies. Int. J. Syst. Sci. 2012, 43, 499–506. [Google Scholar] [CrossRef]
- Shang, Y. Deffuant model of opinion formation in one-dimensional multiplex networks. J. Physi. A Math. Theor. 2015, 48. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sen, M.; Jáuregui-Correa, J.C.; López-Cajún, C.S. Foreground and Background Components in Separable Complex Systems. Systems 2016, 4, 27. https://doi.org/10.3390/systems4030027
Sen M, Jáuregui-Correa JC, López-Cajún CS. Foreground and Background Components in Separable Complex Systems. Systems. 2016; 4(3):27. https://doi.org/10.3390/systems4030027
Chicago/Turabian StyleSen, Mihir, Juan Carlos Jáuregui-Correa, and Carlos S. López-Cajún. 2016. "Foreground and Background Components in Separable Complex Systems" Systems 4, no. 3: 27. https://doi.org/10.3390/systems4030027
APA StyleSen, M., Jáuregui-Correa, J. C., & López-Cajún, C. S. (2016). Foreground and Background Components in Separable Complex Systems. Systems, 4(3), 27. https://doi.org/10.3390/systems4030027