1. Introduction
In recent years, global geopolitical and trade frictions have been intensifying, and coupled with the impact of the COVID-19 epidemic, the world situation is not optimistic. The risk of a break in the global industrial chain has increased, and all kinds of uncertain factors fill the business environment of enterprises, leading to the “broken chain”, “missing chain”, “blocked chain”, and other problems in the industrial production of enterprises. To ensure the security of the supply chain and industry chain, countries have begun to adopt the strategic consideration of the short chain and the flattening of the industrial chain (Gereffi, 2020) [
1]. Under the influence of concepts such as economies of scale, enterprises have implemented global industrial chain strategies to gain greater competitive advantages (Cahyono et al., 2023) [
2]. At the same time, from a broader perspective of sustainable development, a stable industrial chain resilience system not only maintains the long-term continuity of the economic system during crises but also efficiently resists external shocks. It enables flexible resource allocation, promotes green transformation, and reduces ecological damage. Consequently, it balances environmental, economic, and social goals and thus becomes a key mechanism for supporting sustainable development (Liu and Ling, 2020; Manioudis and Meramveliotakis, 2022) [
3,
4]. Against this background, the Chinese Government proposes to strengthen the ability to cope with various risks, enhance the intrinsic dynamics and reliability of the domestic general circulation, improve the quality and level of the international circulation, and strengthen the resilience and the safety of the industry and supply chains. However, although existing studies have extensively discussed supply chain resilience and economic resilience, research on the concept and influencing mechanisms of industrial chain resilience remains limited. Therefore, this paper clarifies the concept of industrial chain resilience and, from a unique industrial chain perspective, explores its influencing factors and mechanisms. It also proposes policy implications, further filling the gap in the existing literature.
The term “resilience” is derived from the Latin word “Resilire”, meaning “restoration”, which means the system has a self-healing ability after external disturbances (Cheng and Zhang, 2020) [
5]. At present, a large number of studies have focused on “supply chain resilience” and “economic resilience”. Supply chain resilience refers to the ability of a supply chain system to quickly respond to and recover from market risks (Christopher and Lee, 2004; Soni et al., 2014) [
6,
7]. For example, Ponomarov and Holcomb (2009) [
8] divided it into three capabilities: preparation, a rapid response, and adaptive recovery. From a management perspective, Baskshi and Kleindorfer (2009) [
9] emphasized the role of supply chain resilience in maintaining system continuity. Innovation capacity and risk management infrastructure are also seen as key supporting factors (Ambulkar et al., 2015; Grossman et al., 2023) [
10,
11]. In addition, supplier diversity and flexible cooperation mechanisms are considered effective ways to prevent supply chain disruptions in advance (Jüttner & Maklan, 2011; Hosseini et al., 2019; Gao et al., 2021; Gu et al., 2021) [
12,
13,
14,
15]. In contrast, research on economic resilience focuses more on a region’s ability to adapt to and recover from macro-level shocks. It covers conceptual definitions, measurement frameworks, and transmission mechanisms (Martin and Sunley, 2015; Brown & Greenbaum, 2017) [
16,
17]. These theories provide important references for studies on industrial chain resilience. However, it is worth noting that industrial chain resilience, as an independent concept, has rarely been clearly defined and systematized in the existing literature.
From an evolutionary perspective, industrial chain resilience refers to the ability of different segments of an industrial chain (especially key nodes) to coordinate responses, recover quickly, and maintain system stability and continuity under complex external shocks (Zhang et al., 2022) [
18]. Although closely related to supply chain resilience, this concept focuses on the structural shock resistance of the entire industrial system. It emphasizes the recovery process involving cross-firm, cross-regional, and cross-industry collaboration, rather than merely the coordination of material flow between companies. Recently, some studies have begun to explore the factors influencing industrial chain resilience. Yang and Liu (2024) [
19] pointed out that building digital infrastructure can significantly enhance the dynamic recovery ability of industrial chains. Chowdhury and colleagues further emphasized that, with increasingly complex industrial divisions of labor, high coupling between geographic embedding and organizational structures makes traditional industrial organization models less effective in dealing with external disruptions (Chowdhury and Quaddus, 2017; Katsaliaki et al., 2022) [
20,
21]. However, it is important to note that most of these studies focus on infrastructure and organizational aspects, with limited attention to the role of emerging technologies, especially artificial intelligence, in strengthening industrial chain resilience.
Artificial intelligence is the core driving force of the new round of industrial revolution, and the onset of the AI boom has caused industrial robots to begin to be used on a large scale in corporate production, affecting the production function by replacing low-skilled labor and increasing the demand for high-skilled labor, thus enhancing the sensitivity of the industrial chain association. Its use continues to provide new dynamics for economic development (Gasteiger and Prettner, 2022; Graetz and Michaels, 2018) [
22,
23], social employment (Dauth et al., 2018) [
24], and labor relations (Acemoglu and Restrepo, 2020) [
25], among others. Zhang (2023) [
26] has found that the AI industry has a tendency to promote both the “upgrading” and “polarization” of both high-skilled and low-skilled labor, which ultimately leads to overall economic development. All of the above literature side by side provides evidence that industrial robot penetration empowers industry chain resilience. However, its specific impact pathways on industrial chain resilience have not yet been directly studied.
In summary, existing studies still have limitations in defining industrial chain resilience, exploring its influencing mechanisms, and developing measurement approaches. In particular, there is a lack of systematic research on how artificial intelligence technologies (such as industrial robots) enhance industrial chain resilience by optimizing production structures and improving response capabilities. Therefore, this paper aims to fill this gap by conducting an empirical analysis of the impact mechanisms of industrial robot penetration on industrial chain resilience and addresses the following key questions: First, from a research perspective, the existing literature on economic toughness and supply chain toughness research has drawn rich conclusions, but few scholars consider the enabling effect of industrial robot penetration on industry chain toughness, and there is no clear understanding of whether and how industrial robot penetration affects industry chain toughness. Second, at the research level, most of the existing studies study the level of industrial robot penetration and industry chain resilience from the macro level of provinces, and the research at the city level is still in its infancy. Further, from the perspective of factors affecting industrial chain resilience, the above literature does not explain from the perspective of factors such as industrial integration and urban innovation vitality. In addition, the above literature has not explored whether the implementation of relevant government policies is effective in improving the resilience of regional industrial chains. Based on this, this paper analyzes the industry chain resilience structure in depth and constructs multi-level and multi-dimensional industry chain resilience indicators so as to help the evaluators grasp the industry chain resilience level of each city more accurately and then explores whether the penetration of industrial robots can promote the development of the industry chain resilience level through the integration of the two industries and the urban innovation vitality, as well as explores its dynamic evolution and spatial spillover effect. In addition to enriching the depth of industry chain resilience research, it also has certain theoretical significance and reference value for the future state to improve the related policies of industrial robots and industry chain safety and enhance stability.
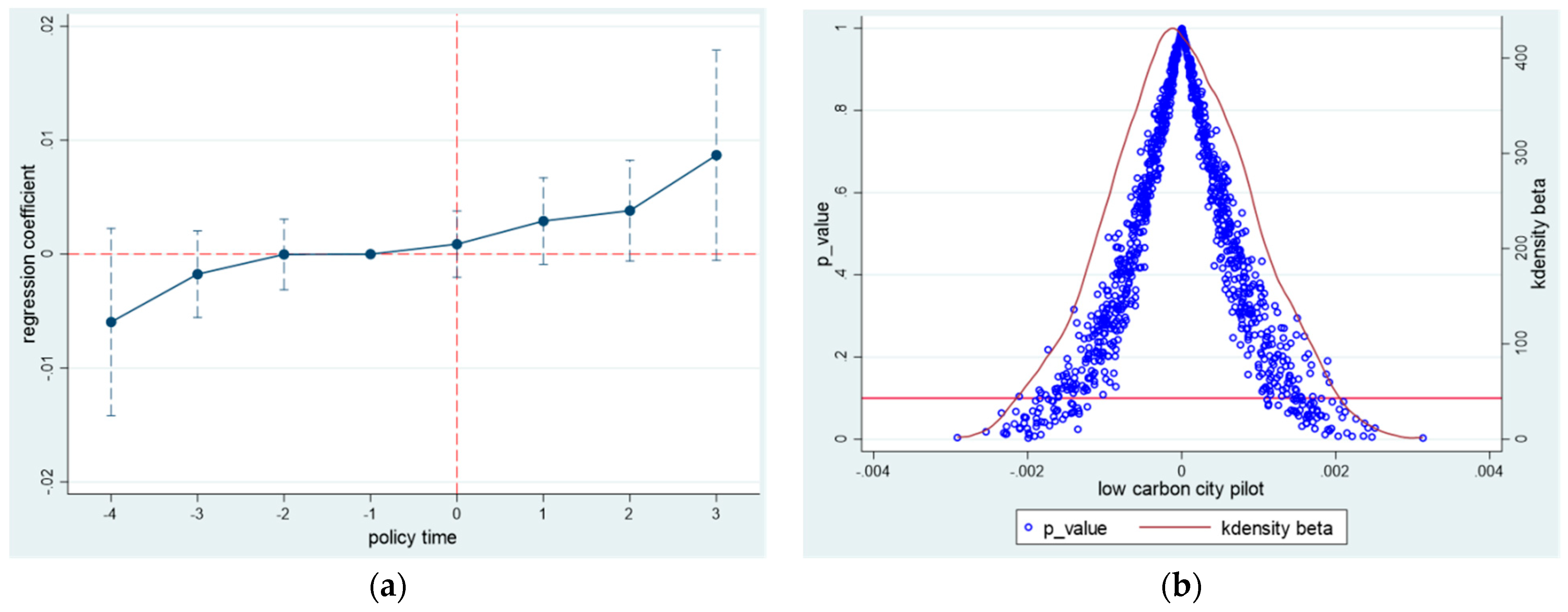
This paper contributes in three main ways: First, based on the idea of evolutionary toughness, the industry chain resilience index system is constructed from the three dimensions of resistance, resilience, and sustainability to measure the industrial resilience at a more microscopic city level, and the mechanism of industrial robot penetration affecting industrial resilience through two paths is demonstrated, thus enriching the research framework of industry chain resilience. Second, we add a “low carbon city”, “broadband China”, and the “innovative city” as the exogenous shocks of pilot policies and explore the impacts of different policies on industry chain resilience with staggered difference-in-differences methods, thus providing a new reference for governments to formulate urban industrial development policies. Third, by constructing threshold and spatial Durbin models, we further assess the nonlinear dynamic evolutionary and spatial spillover effects caused by the influence of industrial robot penetration on industry chain resilience.
This paper is structured as follows:
Section 2 presents three research assumptions.
Section 3 introduces the data and methodology used in the article, including model introduction, indicator selection, variable description, and information sources.
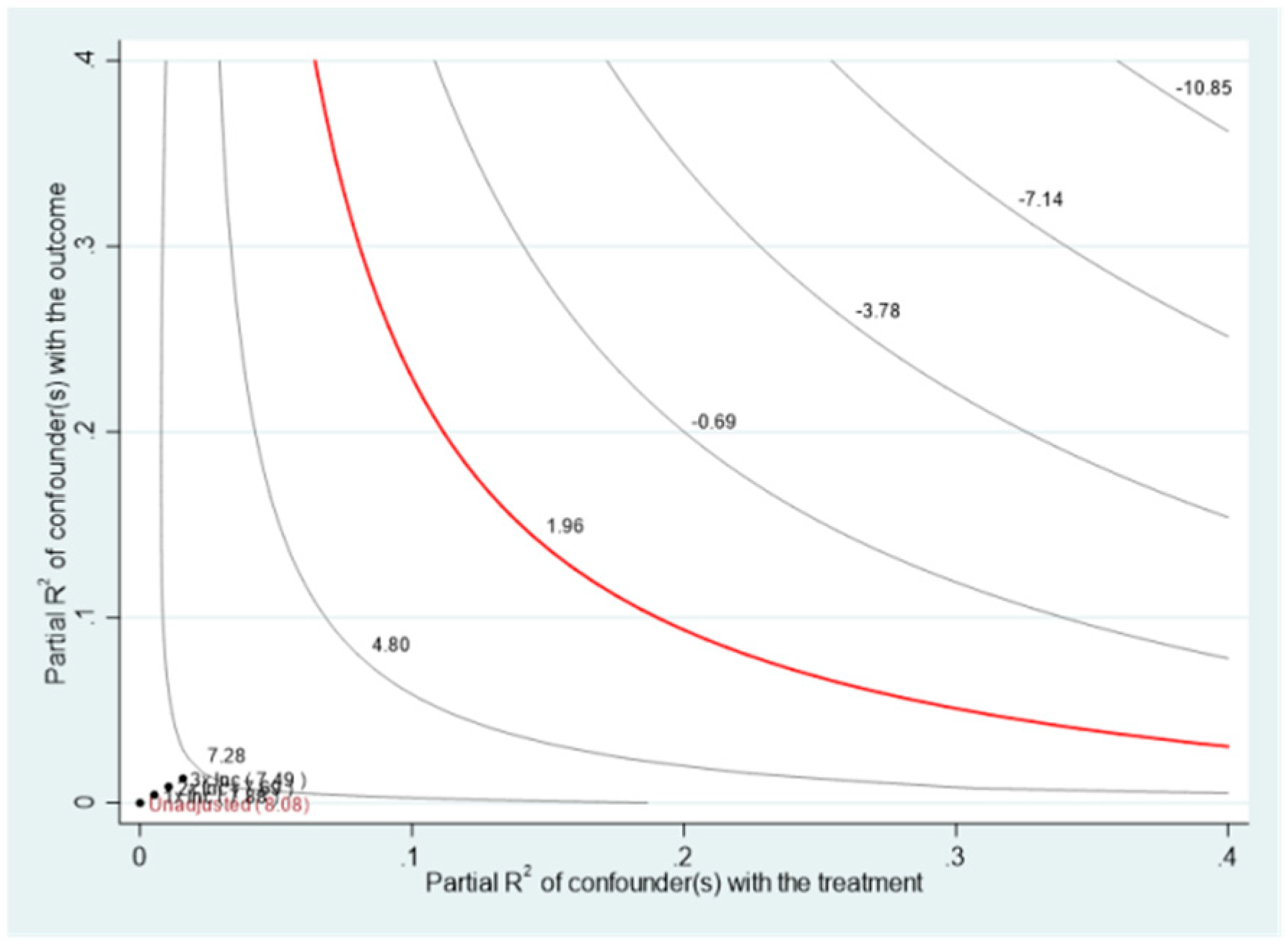
Section 4 explores various influence mechanisms of industrial robots on industry chain resilience and conducts exogenous shock tests. Further, we select multiple methods to conduct endogeneity, robustness, and heterogeneity tests.
Section 5 summarizes the research results of this paper and provides policy recommendations.
2. Conceptual Analysis and Hypothetical Frameworks
With the development of the economy, enterprises are looking for more efficient ways to foster the development of the industrial chain so as to enhance their competitiveness. According to the definition given by the International Federation of Robotics, industrial robots are a kind of multi-jointed manipulator or multi-degree-of-freedom robot used in industrial production, which can replace human beings to accomplish certain monotonous, complex, and time-consuming work (Acemoglu and Restrepo, 2020) [
25].
First, industrial robot penetration can enhance the resilience of the industry chain. As a specialized type of industrial automation equipment, industrial robots improve production efficiency, enable enterprises to respond quickly to changes in market demand, and adjust production capacity in a timely manner. This ensures that enterprises maintain competitiveness amid supply and demand fluctuations, thereby strengthening the industry’s ability to withstand external risks. Graetz and Michaels (2018) [
23] argued that the inputs of industrial robots can increase enterprise total factor productivity, thus increasing the development potential of the manufacturing sector. Secondly, industrial robots can significantly reduce errors caused by human operations and improve product quality. Therefore, industrial robotics technology not only enhances production efficiency but also strengthens quality management, further improving the resilience of the industrial chain. In addition, with the increase in uncertainty in the global production chain, such as natural disasters, epidemics, and geopolitical conflicts, enterprises often face the risk of interruption of the industrial chain supply chain, while industrial robots can quickly adapt to diversified production tasks; scientifically deploy upstream and downstream resource elements; guarantee the continuous supply of enterprise funds, manpower, materials, and other resources; and help enterprises or regions to resist risks. Therefore, the penetration of industrial robots can significantly improve the resistance of the industrial chain, especially in the face of emergencies, and industrial robots can quickly adjust the production line to maintain stable production.
Second, industrial robot penetration can improve chain resilience. Grabner and Modica (2022) [
27] concluded that more industrialized regions seem to be less affected by economic shocks than other regions, probably because of the structure of an industry in each region (e.g., the specialization and diversification of production, etc.). First, industrial robots are highly flexible and can quickly adjust production lines in response to unforeseen circumstances or changes in market demand. Traditional production methods require significant time and resources to adjust when the industrial chain is disrupted or demand changes suddenly. In contrast, industrial robots can switch tasks quickly through rapid reprogramming. This ensures that production continues without interruption from external factors. This flexible production capacity enables companies to quickly resume operations and shorten recovery time when experiencing a crisis. Secondly, the increased level of automation reduces the reliance on human resources, and industrial robots have the ability to ensure the continuation of production in extreme environments. This self-healing ability allows the industry chain to recover faster in the face of unexpected events. Finally, industrial robots can optimize the production process in real time through intelligent control and monitoring systems. When external resources are in short supply, industrial robots optimize resource utilization, helping enterprises maintain production stability even when the industry chain is disrupted. Therefore, industrial robots not only improve the flexibility of production but also enhance the enterprise’s self-repair ability in the face of emergencies and promote better recovery of the industrial chain.
First, based on the resource-based view (RBV) theory, a firm’s competitive advantage comes from the efficient use of scarce and irreplaceable resources (Barney, 1991) [
28]. Industrial robots help improve resource efficiency through smart technologies. They optimize the allocation of production factors, which reduces energy consumption and waste. This not only lowers the environmental burden during production but also extends equipment lifespan and lessens the dependence on non-renewable resources. These effects align with the principles of the circular economy (Geissdoerfer et al., 2017) [
29]. Second, according to the theory of dynamic capabilities, firms need to sense changes, respond quickly, and reconfigure resources to maintain their competitive advantage in a changing environment (Teece et al., 1997) [
30]. The high flexibility and adaptability of industrial robots enable production systems to adjust rapidly to external changes, such as market demand fluctuations or industrial chain disruptions. This improves the adaptability and resilience of industrial chains under resource constraints and market volatility. It also helps avoid resource waste and overproduction, supporting stable operations and green transformation (Teece, 2014) [
31]. Finally, from the perspective of the ecological modernization theory, technological innovation is seen as a key driver for solving environmental problems and achieving sustainable development. Industrial robots promote the deep integration of high-tech manufacturing and green production processes. They strengthen firms’ capabilities in using renewable energy and eco-friendly materials, pushing industrial chains toward greener and low-carbon development (Andersen and Massa, 2000) [
32]. This innovation-driven green growth model not only boosts business competitiveness but also provides structural support for the long-term sustainability of industrial chains in the face of global climate change and resource constraints.
Hypothesis 1. Industrial robot penetration significantly impacts industry chain resilience. Industrial robots can significantly enhance industrial chain resilience by improving production efficiency, reducing errors during manufacturing, and increasing the flexibility and adaptability of the industrial chain. Based on the previous theoretical analysis and empirical evidence, we propose that the penetration of industrial robots has a significant positive impact on industrial chain resilience.
How can industrial robots enhance the development of industrial chain resilience? First of all, industrial robots enhance the overall resilience of the industry chain. They promote accelerated synergy between the manufacturing and service sectors, driving the industry toward higher-end development. The penetration of industrial robots enhances the automation level in the manufacturing industry. Additionally, they integrate deeply with the upstream, midstream, and downstream links of the manufacturing chain through productive service industries. For example, production process optimization, intelligent logistics, and other service industry areas have been able to seamlessly integrate with manufacturing, greatly enhancing the flexibility and adaptability of the industry chain. Chen et al. (2024) [
33], taking listed companies in China’s service industry as an example, found that AI promotes shared prosperity among service industry enterprises, thereby laying the foundation for developing regional industry chains. According to Jacobe’s externality theory, with the advancement of economic globalization, the differences and diversity between different industries create the conditions for knowledge spillover, which promotes the collaborative innovation of advanced manufacturing and production service industries. The knowledge spillover effect not only enhances the speed of technological innovation but also optimizes the allocation of resources, making the manufacturing and service industries more closely integrated. The deepening of industrial integration means that the boundaries between different industries are gradually blurred, and resources and technology can flow flexibly between the manufacturing and service industries, which improves the resilience of the industrial chain to external shocks. Autor et al. (2003) [
34] believe that the integration of the manufacturing and service industries has raised the level of automation, which significantly reduces labor demand. This trend has not only weakened firms’ dependence on a single link but also enhanced their ability to allocate and manage resources within the supply chain, thereby improving their ability to cope with external market changes and supply chain disruptions.
Second, the enhancement of urban innovation vitality is a crucial factor. It allows industrial robot penetration to drive the resilient development of the industrial chain. Schumpeter’s new economic theory argues that the value of innovations can be realized only in the process of diffusion and application (Schumpeter and Opie, 1934) [
35]. With the wide application of industrial robots in different cities and regions, the city’s innovation vitality has been increasing, especially in technology-intensive cities, which have formed regional innovation clusters by attracting high-end manufacturing enterprises and scientific and technological innovation talents through robotics. Through this clustering effect, cities are not only able to promote the rapid transformation of scientific and technological achievements but also provide better innovation infrastructure and resource support for the integration of the manufacturing and service industries. This enhancement of regional innovation capacity drives technological breakthroughs in manufacturing enterprises. It also fosters the development of the industrial chain towards higher value-added and greater resilience. Based on the data of industrial robots in China, Liu et al. (2020) [
36] discovered that the development of industrial robots plays a crucial role in advancing technological innovation within enterprises, particularly in high-tech industries. Robotics accelerates technological iteration, enhancing the flexibility and resilience of businesses in adapting to market changes and supply chain fluctuations. Such technological innovation is not only reflected at the individual level of enterprises but also promotes the optimization of the entire economic structure and contributes to the regional and national industrial chain with stronger resilience in the face of external shocks.
In summary, industrial robots significantly enhance the resilience of the industrial chain by promoting the industrial integration of the manufacturing and service industries and enhancing the innovation capacity of cities, and the dual mechanisms work together. Industrial integration optimizes resource allocation and increases the flexibility of resource and technology flow between industries. Meanwhile, urban innovation vitality offers an external impetus for the technological transformation of the industrial chain. Together, these factors enhance the resilience of the industrial chain, providing a stronger foundation to cope with global economic fluctuations. Based on this, this paper proposes the following assumptions.
Hypothesis 2. Industrial robot penetration promotes industry chain resilience through two mechanisms: industrial integration and urban innovation dynamics. In the previous discussion, we showed that industrial robots not only promote the deep integration of manufacturing and services but also boost innovation at the city level. Based on both theory and empirical analysis, we propose that the penetration of industrial robots strengthens industrial chain resilience by driving industrial integration and enhancing urban innovation capacity.
The spatial spillover effect of industrial robot penetration on industry chain resilience manifests in several areas. Geographic proximity and the sharing of technology resources play key roles. These factors can foster interregional collaborative innovation and facilitate knowledge spillover. Tang et al. (2022) [
37] have found that geographic proximity can promote collaborative innovation among enterprises, which in turn promotes the development of industrial agglomeration and the regional industrial economy. This agglomeration effect is not only limited to interactions within a single industry but also enhances the innovation capacity and stability of the industrial chain of the whole region through cross-industry knowledge sharing and technology diffusion. Goldfarb and Tucker (2019) [
38] further point out that the development of the digital economy has the same significant spatial spillover effect. Carlino and Kerr (2015) [
39] examine the manufacturing industry from the perspectives of spatial agglomeration and innovation. They analyze the spatial spillover effects and internal mechanisms of manufacturing development. Their findings suggest that spatial agglomeration not only fosters innovation activities but also enhances industry chain resilience through knowledge flow and technology spillover.
Industrial robots facilitate industrial agglomeration and growth in the region and its surroundings by fostering interactions among technology, talent, and capital with neighboring areas. This agglomeration effect not only makes the technology spillover effect more obvious but also raises the competitive pressure among enterprises, prompting them to continuously improve their productivity and innovation ability, forming a virtuous cycle. Liu and Zhang (2021) [
40] argue that the spatial agglomeration of the manufacturing industry has a significant contributing effect on the resilience of the manufacturing industry, but there is urban heterogeneity. This means that different regions will show different expressiveness in absorbing the spillover effects of industrial robotics.
In summary, industrial robots, as an emerging technology, promote the industrial agglomeration and development of the region through the exchange of talent resources, technology resources, and capital with neighboring regions and generate technological spillovers. At the same time, technological spillover will also cause inter-industry competition, and enterprises will continue to improve their own production efficiency in order to obtain higher returns, which in turn will boost the level of regional industrial chain resilience. Based on this, this paper puts forward the following hypothesis.
Hypothesis 3. Industrial robot penetration generates a spatial spillover effect on the development of industry chain resilience. Spatial spillover effects are an important sign of industrial clustering and resource sharing. Industrial robots interact with nearby regions through technology, talent, and capital. This promotes regional industrial clustering and strengthens industrial chain resilience through technology spillovers. Therefore, we propose that the penetration of industrial robots has significant spatial spillover effects.
5. Concluding Remarks and Policy Implications
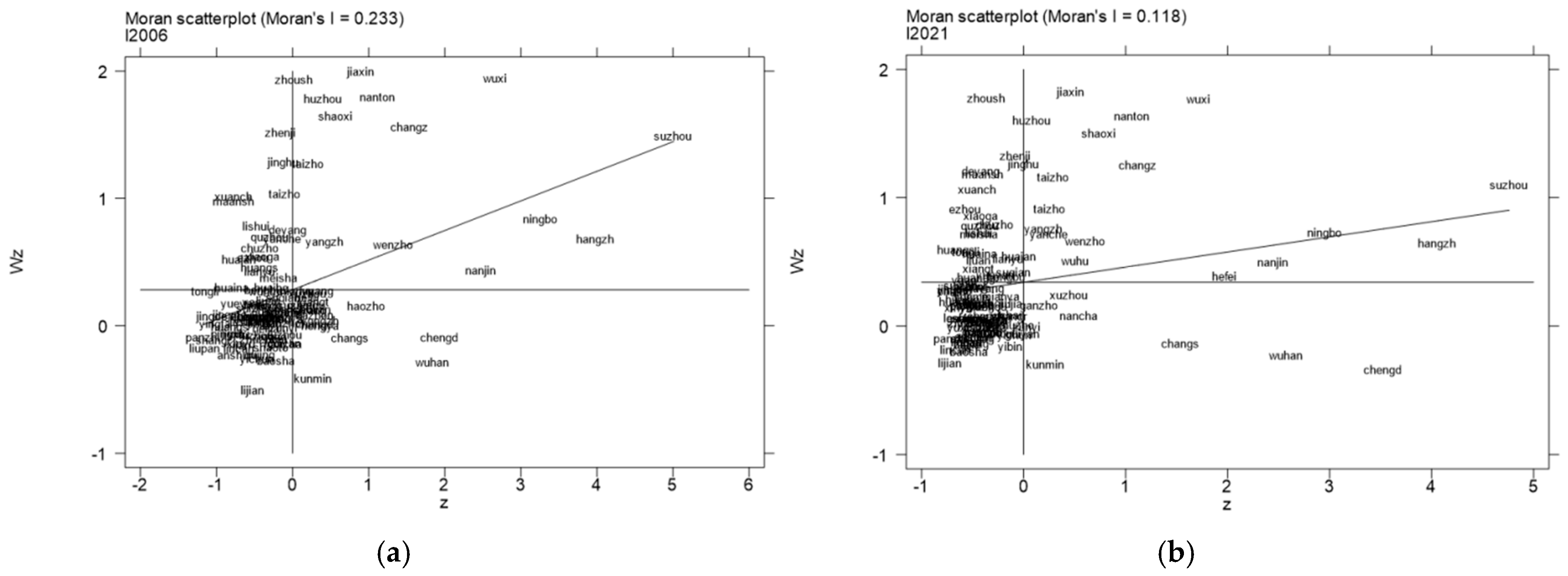
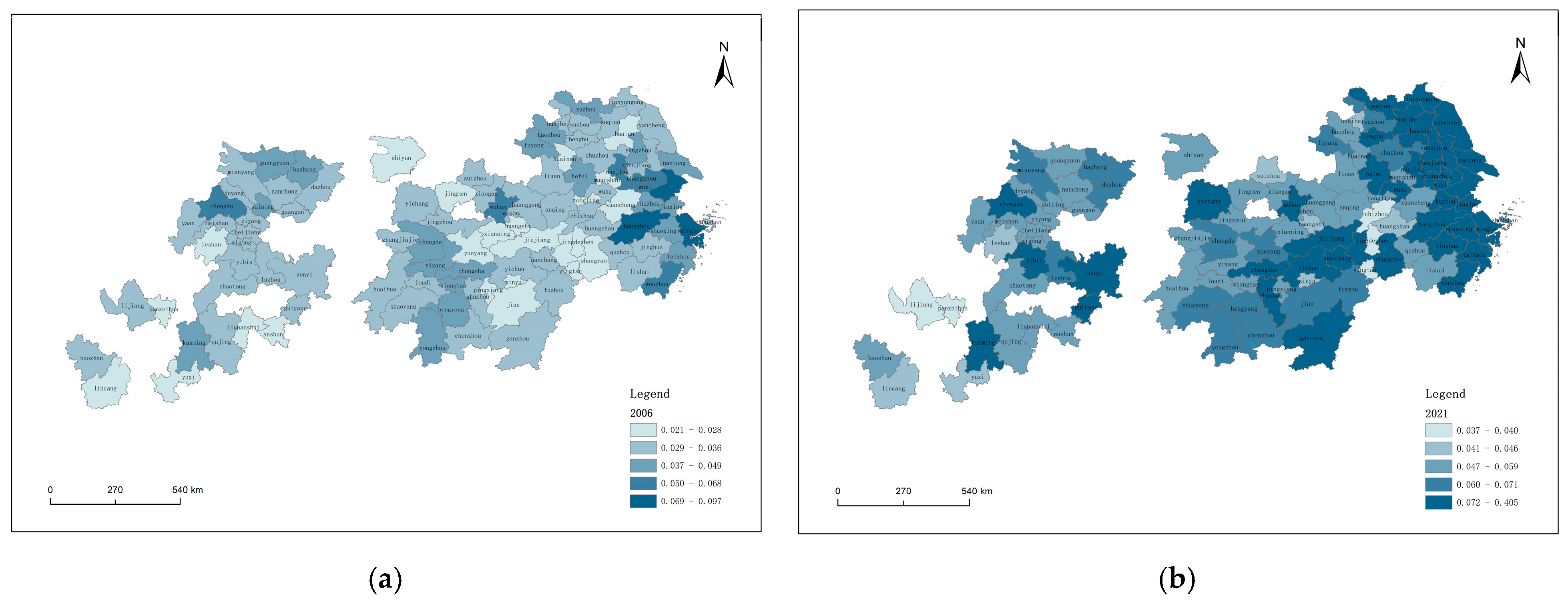
This paper empirically examines the driving mechanism and spillover effect of industrial robot penetration on regional industry chain resilience development based on the panel data of 104 cities in China’s Yangtze River Delta urban agglomeration from 2006 to 2021 using quantile regression, the indirect effects model, the threshold model, the multi-temporal difference model, and the spatial measurement model. The results show that, firstly, industrial robot penetration has a positive effect on industry chain resilience development, and the promotional impact is notably stronger within the upper quartile of the industry chain. Secondly, industrial robot penetration can enhance regional industry chain resilience development through the two mechanisms of two-industry integration and urban innovation vitality. Thirdly, through threshold effect analysis and a quasi-natural experiment design, urban innovation vitality, the human capital level, the science and technology level, and the disposable income of urban residents have a nonlinear significant impact on the development of the industry chain resilience level, and the government promotes the development of the industry chain through the introduction of “low carbon city”, “broadband China”, and other policy pilots. Fourthly, the penetration of industrial robots and the industry chain resilience level has a strong spatial and temporal correlation as well as regional aggregation, and the spatial spillover coefficient is significantly positive, demonstrating that the radiation effect is positive.
Based on the above findings, this paper proposes three practical policy recommendations. These aim to guide the rollout of industrial robots more effectively, boost regional industrial chain resilience, and address the uneven impact of technology adoption.
First, tailor industrial robot strategies to local conditions to improve regional adaptability and efficiency. The results show that the positive effect of robot penetration on industrial chain resilience is more significant in high-resilience cities, demonstrating a “stronger becomes stronger” effect. In this context, the government should implement robot development strategies according to local industrial structures and resource endowments. For core cities with strong manufacturing foundations, innovation capabilities, and complete industrial chains, the government should encourage them to take the lead in deepening robot integration, focusing on upgrading information infrastructure, 5G network coverage, and building industrial data platforms to create national “smart manufacturing demonstration zones”. On the other hand, for cities with weak industrial chain resilience or insufficient capacity to absorb high-tech innovations, the government should offer policy support and technical assistance, such as subsidies for robot purchases, collaborative platforms between local universities and enterprises, and training programs to mitigate the labor displacement caused by robots, ensuring that robot technology is “accessible, usable, and manageable”. Additionally, social capital should be encouraged to participate in robot technology promotion and the digital transformation of industrial chains using financial guiding funds and government–social capital cooperation (PPP) mechanisms to alleviate the “initial disadvantage” faced by small and medium-sized cities in terms of funding and technology.
Second, leverage industrial robots as a mediator in the integration of manufacturing and services, as well as enhance urban innovation vitality. The mechanism analysis shows that industrial robots contribute to industrial chain resilience by promoting the integration of advanced manufacturing and modern services, as well as improving the efficiency of urban innovation resources. Therefore, the government should focus on deepening the coupling of manufacturing and services. In terms of policy tools, the government should support leading manufacturing enterprises in increasing service levels by building digital supply chain platforms, introducing flexible manufacturing systems, and upgrading to smart factories. Foster service-oriented intermediaries to provide high-value-added services such as system integration, data analysis, and operational support for manufacturing enterprises, thus enhancing the robot ecosystem. Promote the development of new industries such as high-end manufacturing, technological services, information services, and the platform economy, thereby creating a “manufacturing + services + innovation” collaborative development model. In terms of enhancing urban innovation vitality, based on the threshold model, the government should increase R&D investment in cities with low innovation capacity and promote the construction of regional innovation hubs, technology transfer centers, and joint experimental platforms, especially focusing on breakthrough R&D in key technologies such as precision reducers and servo motors used in industrial robots. Furthermore, an “Industrial Chain Resilience Enhancement Plan” could be established to support key industries in addressing weak links and attracting foreign investment and high-end talent, thus strengthening the city’s “internal innovation” capabilities.
Third, promote regional industrial collaboration, enhance the spatial positive spillover effect of robot penetration, and build an open and resilient development framework. The empirical results from the spatial Durbin model show that industrial robot penetration has a significant spatial positive spillover effect, where high-resilience cities drive technological diffusion and institutional imitation in neighboring cities. However, regional administrative barriers and resource isolation hinder the formation of cross-regional resilience mechanisms. Therefore, the government should break down regional protectionism and coordinate the establishment of industry collaboration platforms at the city cluster level. This would encourage high-resilience cities to work with neighboring smaller cities to build “industrial enclaves”, “shared factories”, and “distributed service centers”, enabling the optimal allocation of robot technology, data, and talent across a broader spatial scale. Moreover, leveraging national strategies such as the Yangtze River Delta integration and metropolitan area development, the government should establish a regional industrial chain resilience coordination mechanism. This would involve shared public technology platforms and cross-domain industrial linkage projects to enhance policy coordination and the flexibility of responses to unexpected events. In particular, during natural disasters or supply chain disruptions, enhancing the deployment of industrial robots in critical enterprise nodes will help ensure the stable operation of core segments of the industrial chain.
In conclusion, industrial robot penetration plays a significant role in improving regional industrial chain resilience, but its effects vary significantly across regions, and there are certain risks associated with labor displacement and technology adaptation. Future policy design should focus on shifting from “promoting technology diffusion” to “encouraging quality technology absorption” with differentiated promotion, mechanism integration, and regional collaboration to build a robust, flexible, and cooperative industrial chain resilience enhancement system.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}