

Effective Evolutionary Principles for System-of-Systems: Insights from Agent-Based Modeling in Vehicular Networks

Abstract
1. Introduction
2. Preliminaries
2.1. The Concept of SoS Evolution
2.2. Guiding Principles for SoS Evolution
2.2.1. Facilitate Information Exchange
2.2.2. Implementing Uniform Standards
2.2.3. Enhancing Transparency of Information
2.2.4. Establishing Common Goals
2.3. Agent-Based Modeling
3. Methodology
3.1. Overall Model Structure
3.2. SoS Evolution
3.3. Agent Behaviors
3.4. Principle
3.5. Indicators
3.6. Monte Carlo Simulation and Model Verification
3.7. Time Complexity Analysis
4. Results
- (1)
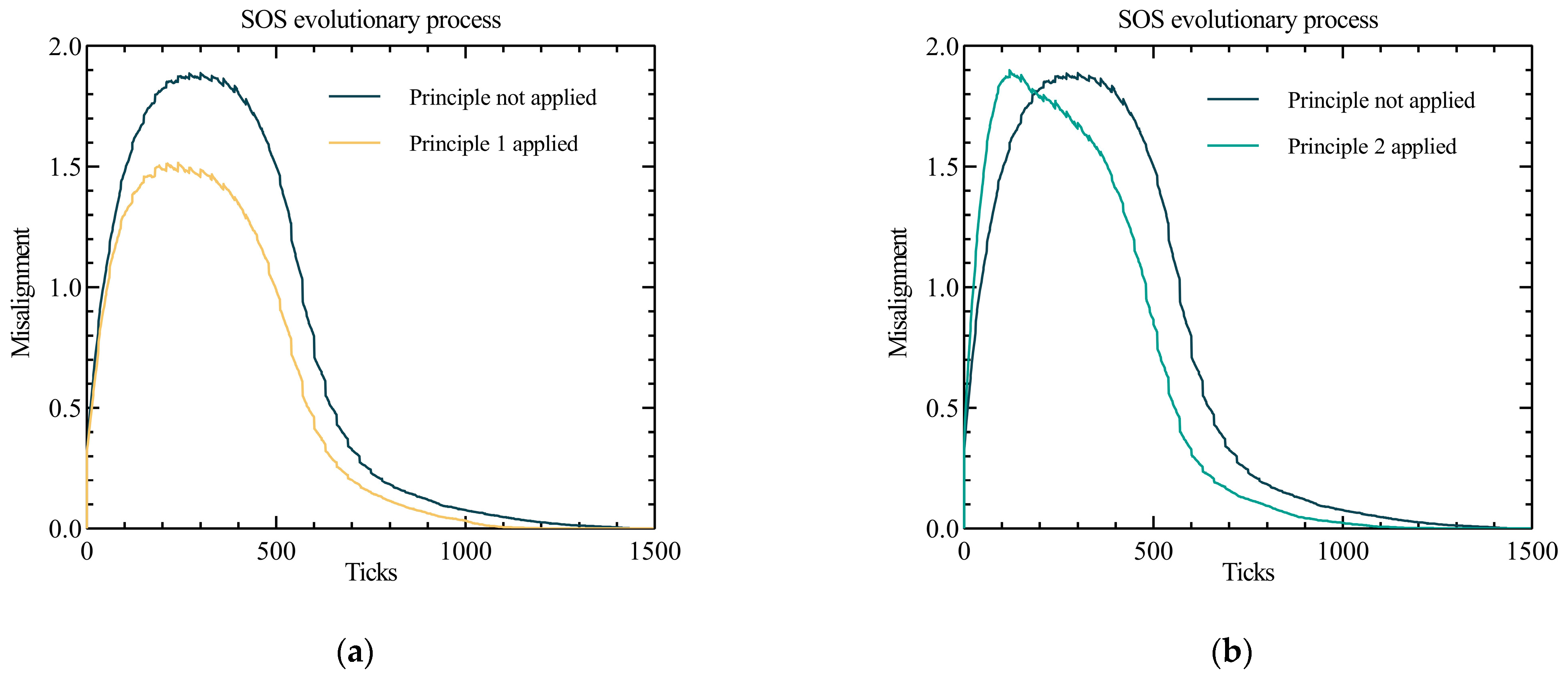
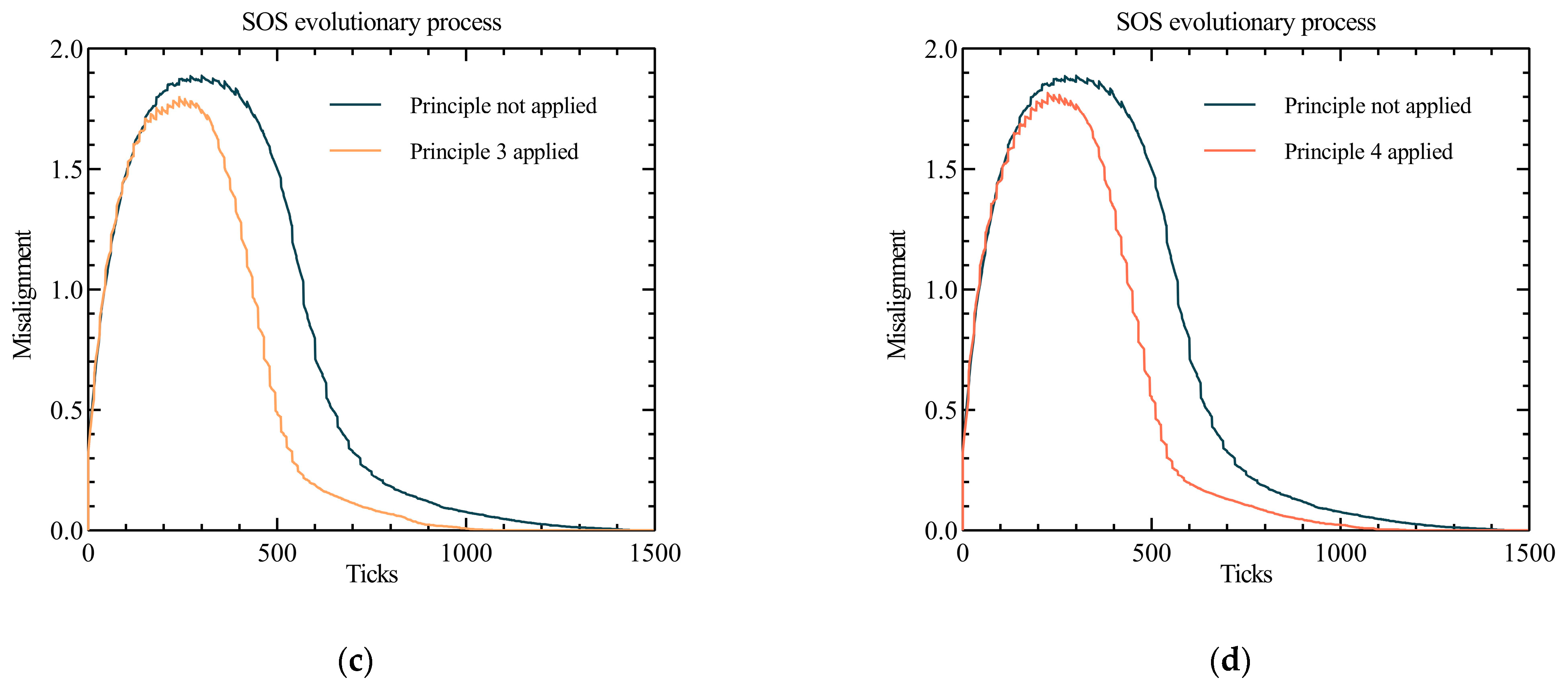
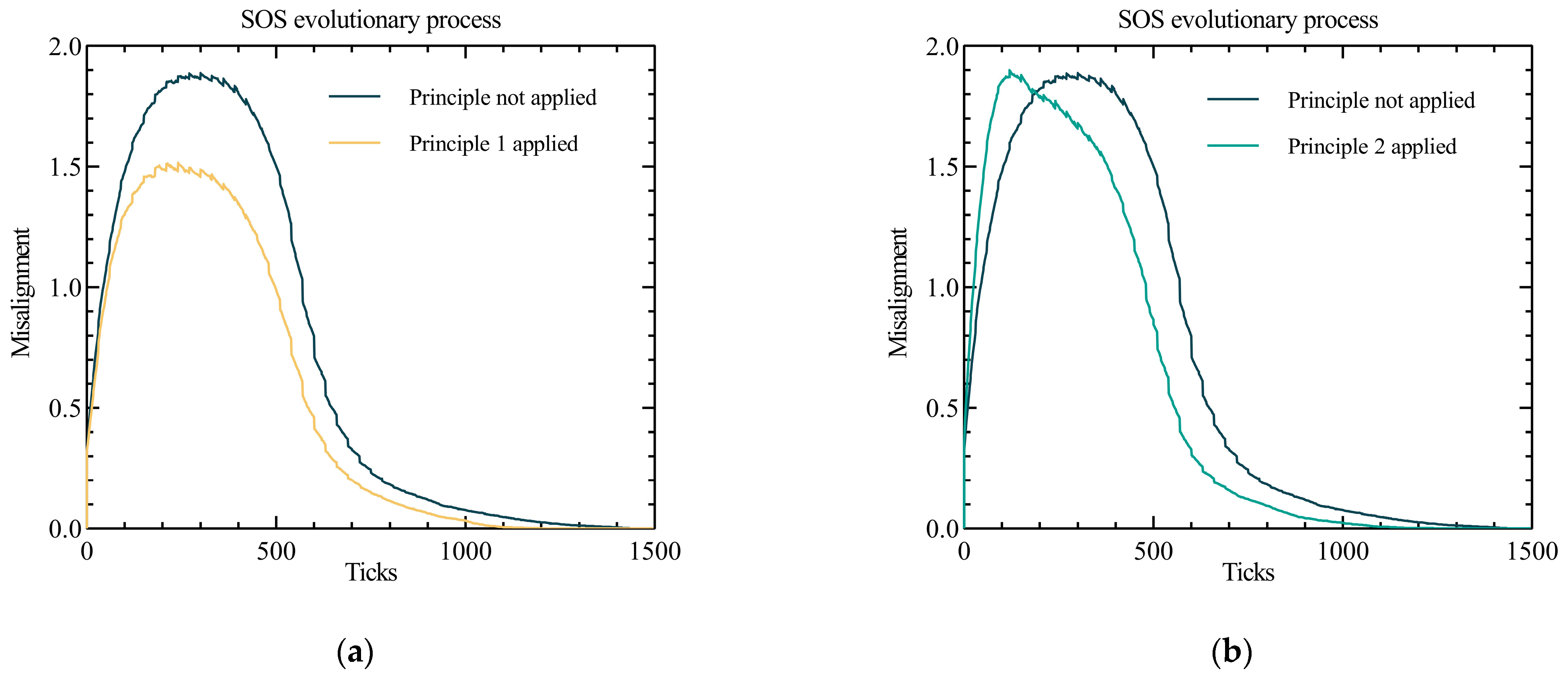
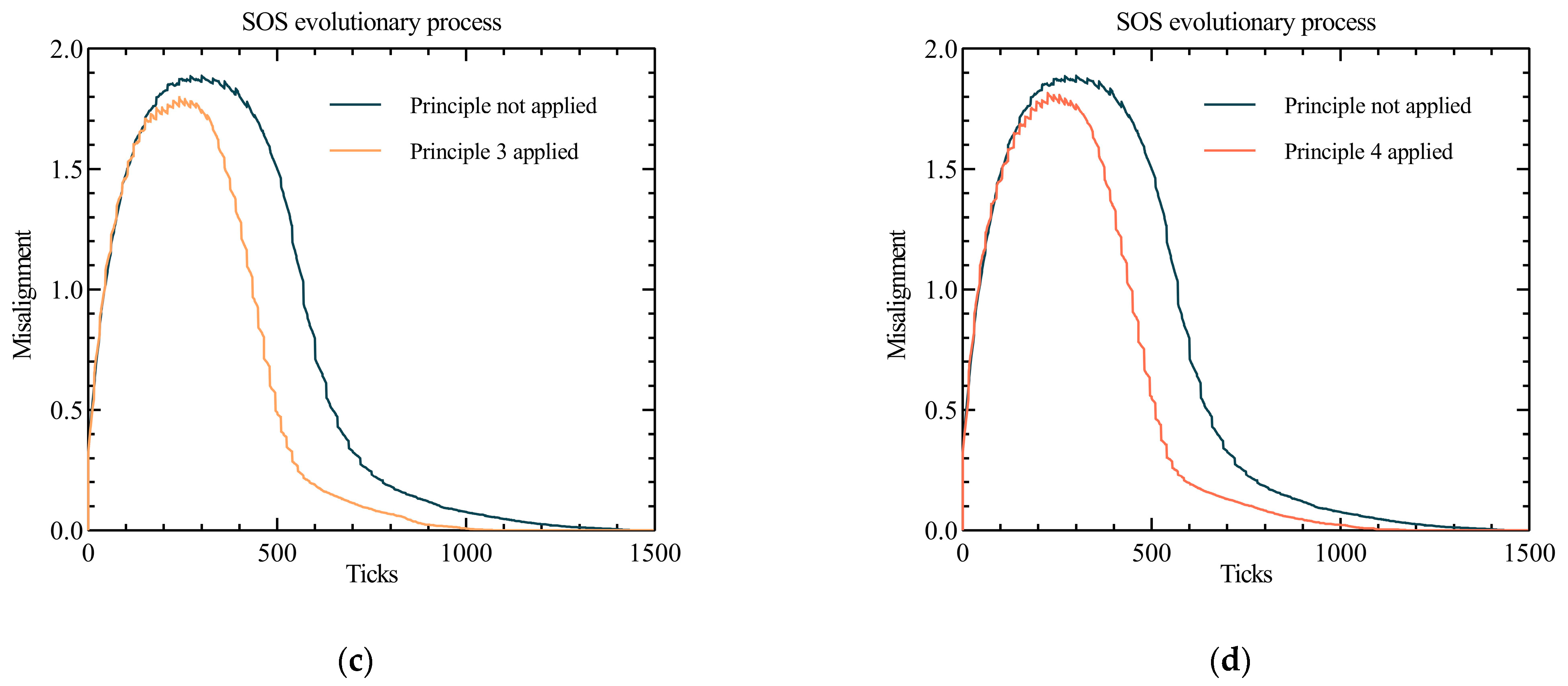
- The misalignment metrics in all four graphs showed an increasing and then decreasing trend. The reason for this phenomenon is that the initial interactions between some of the constituent systems increased the degree of difference among all nodes in the SoS under the influence of the external environment. As the interactions continued, evolution caused the degree of difference between most of the constituent systems to decrease, eventually leading to complete evolution;
- (2)
- The peak misalignment values in the plot for principle 2 (Implementing Uniform Standards) occurred earlier than those without the application of the principle. The reason for this phenomenon is that the application of this principles increased the overall efficiency of the system at an early stage and different nodes in the installation received more new information in a short period of time, thus creating differences between the self-managed systems. Meanwhile, the peak misalignment values in the plot of principle 1 (Facilitating Information Exchange) was significantly lower than that without the application of the principle, probably as the exchange of information between nodes somewhat mitigated the degree of difference between the self-managed systems;
- (3)
- Compared to the control group, the misalignment values of the SoS with different principles applied were all improved, in terms of the rate of decline after reaching the peak. As such, the time to complete SoS evolution was also shorter in all cases. This indicates that the application of different principles can enhance the efficiency of system evolution, to some extent.
- (1)
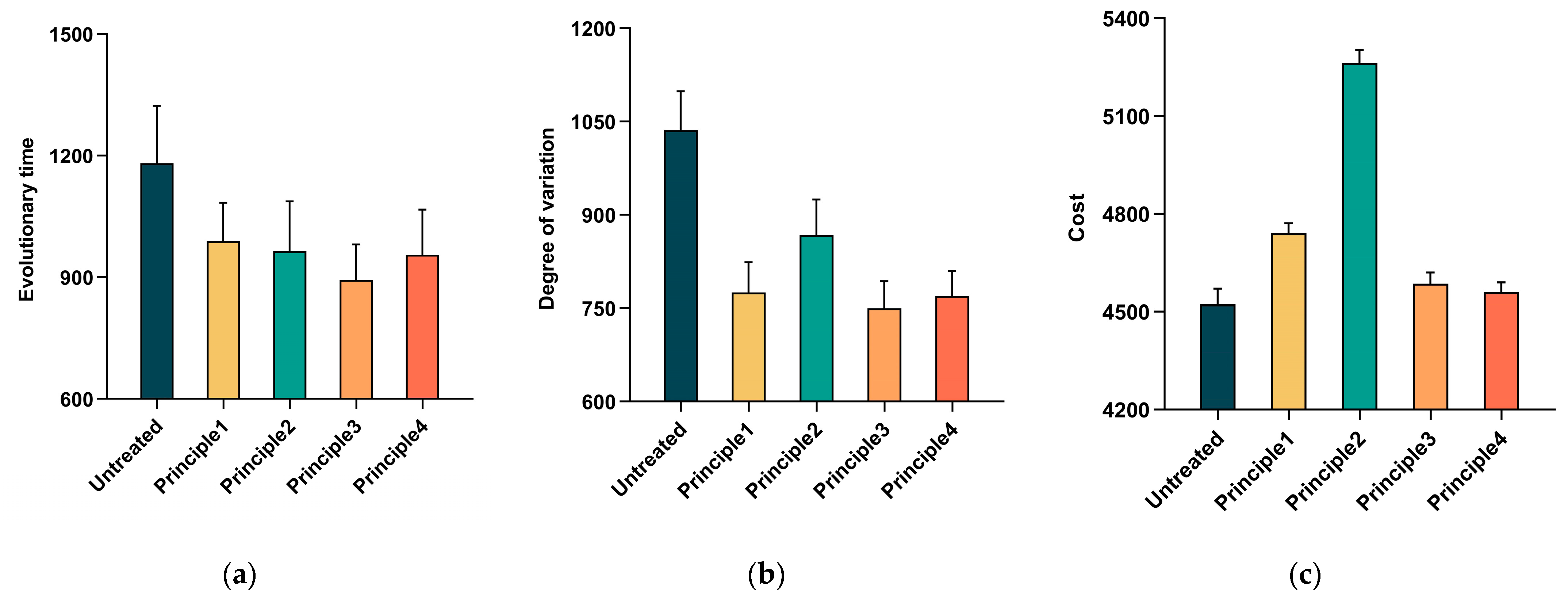
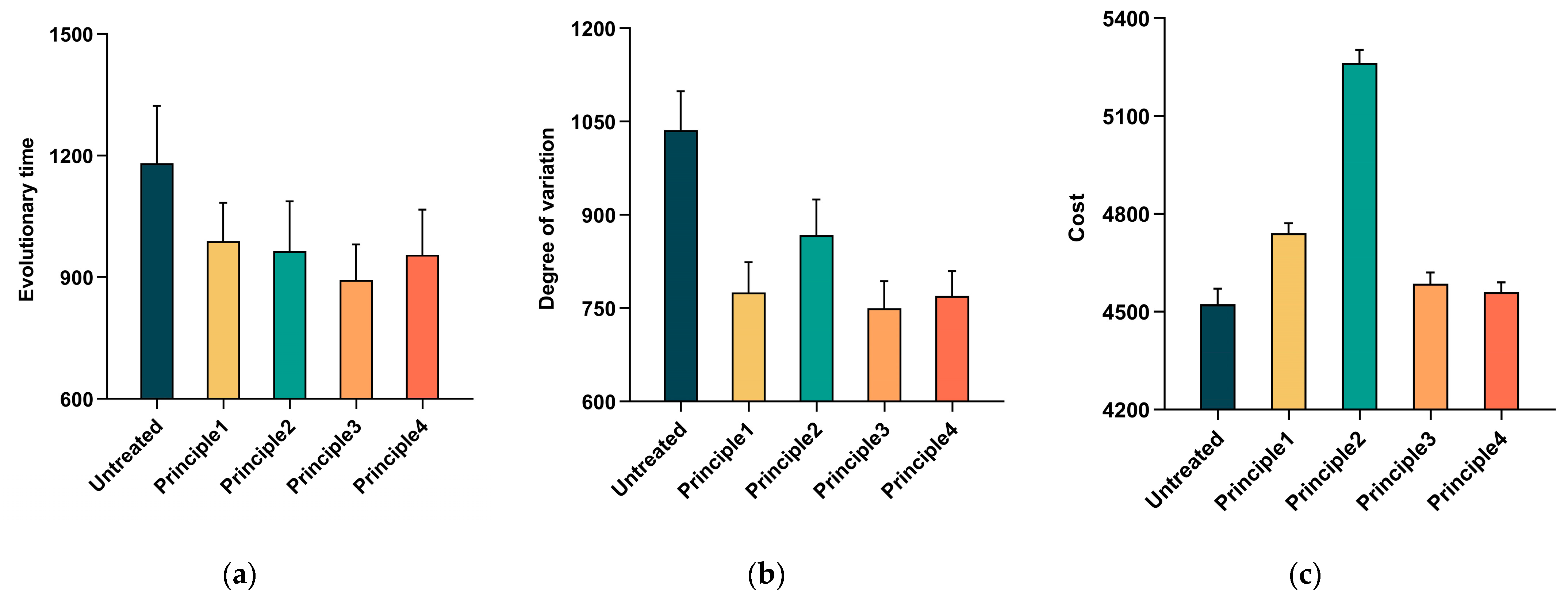
- Figure 6a shows the average evolution time of the SoS with the different principles applied. The evolution time for the SoS without applying any principles was 1181.2 s. The evolution times for the systems with principle 1 and principle 2 applied were close, at 989.8 s and 965.0 s, respectively (roughly 82% of the original time). Meanwhile, the average evolution time with principle 4 applied was 954.8 s (80.8% of the original time), and the lowest evolution time was obtained with principle 3, which was only 892.8 s (or 75.6% of the original time);
- (2)
- Figure 6b shows the degree of variation accumulated in the evolution of the SoS with the application of the different principles. All four principles reduced the degree of variation to a greater extent. The smallest reduction was obtained with principle 2 (Implementing Uniform Standards), which was 83.8% of the baseline variance, while the greatest reduction in the degree of variation was achieved with principle 1 (Facilitating information exchange), which was 72.3% of the baseline degree of variation.
5. Discussion
5.1. Elaboration of Experimental Outcomes
5.2. Evaluating the Efficacy and Limitations of the Model
5.3. Bridging Natural and Social Sciences: A Methodological Discourse
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Experimental Values | Test Values | Units | Finding |
|---|---|---|---|---|
| Number of knowledge values contained in a single knowledge set | 30 | 10 20 50 | N/A | Parameter variation has a large effect on the simulation time, but a small effect on the trend of the results. |
| Number of agents of the same type | 25 | 20 30 | N/A | Parameter variation has a large effect on the simulation time, but a small effect on the trend of the results. |
| Number of groups of the same type of agents | 3 | 1 2 4 | N/A | Parameter variation has a large effect on the simulation time, but a small effect on the trend of the results. |
| Number of simulations per experimental condition | 80 | 60 100 | N/A | Low parameter sensitivity. |
| Number of vehicle status changes initially generated | 3 | 1 2 5 | N/A | Low parameter sensitivity. |
| Number of natural environmental changes initially generated | 3 | 1 2 5 | N/A | Low parameter sensitivity. |
| Number of man-made environmental changes initially generated | 3 | 1 2 5 | N/A | Low parameter sensitivity. |
| Number of knowledge points that need to be received as a result of a vehicle status change | 5 | 3 7 10 | N/A | Low parameter sensitivity. |
| Number of knowledge points that need to be received as a result of a natural environmental change | 3 | 1 5 7 | N/A | Low parameter sensitivity. |
| Number of knowledge points that need to be received as a result of a man-made environmental change | 2 | 1 3 4 | N/A | Low parameter sensitivity. |
| Percentage of communication in the same group | 15 | 10 20 30 | % | Low parameter sensitivity. |
| Cost of communication in the same group | 1 | 0.5 2 3 | Gbps | Low parameter sensitivity. |
| Percentage of communication of the same type agents | 10 | 5 15 20 | % | Low parameter sensitivity. |
| Cost of communication of the same type agents | 2 | 1 3 4 | Gbps | Low parameter sensitivity. |
| Percentage of communication of the different type agents | 5 | 2 8 15 | % | Low parameter sensitivity. |
| Cost of communication of the different type agents | 3 | 1 5 7 | Gbps | Low parameter sensitivity. |
| Percentage of negotiation | 10 | 5 15 20 | % | Low parameter sensitivity. |
| Cost of negotiation | 2 | 1 3 4 | Gbps | Low parameter sensitivity. |
| Profit of negotiation success | 10 | 5 15 20 | % | Low parameter sensitivity. |
| Loss of negotiation failure | 10 | 5 15 20 | % | Low parameter sensitivity. |
| Percentage of learning | 10 | 5 15 20 | % | Low parameter sensitivity. |
| Cost of learning | 2 | 1 3 4 | Gbps | Low parameter sensitivity. |
| Profit of learning success | 5 | 3 7 12 | % | Low parameter sensitivity. |
| Profit of learning failure | 10 | 5 15 20 | % | Parameter variation has a large effect on learning. The choice of parameters satisfies the balance with other behaviors. |
| Time cycle of cooperation | 8 | 5 10 15 | s | Parameter variation has a large effect on cooperation. The choice of parameters satisfies the balance with other behaviors. |
| Percentage of cooperation | 20 | 10 30 40 | % | Low parameter sensitivity. |
| Cost of cooperation | 8 | 5 10 15 | Gbps | Low parameter sensitivity. |
| Profit of cooperation success | 10 | 5 15 20 | % | Low parameter sensitivity. |
| Loss of cooperation failure | 20 | 10 15 30 | % | Parameter variation has a large influence on cooperation. The choice of parameters satisfies the balance with other behaviors. |
| Percentage of competition | 10 | 5 15 20 | % | Low parameter sensitivity. |
| Cost of competition | 2 | 1 3 4 | Gbps | Low parameter sensitivity. |
| Loss of competition failure | 5 | 3 7 15 | s | Low parameter sensitivity. |
| Probability increase value of principle 1 (Facilitate Information Exchange) on communication | 30 | 10 20 40 | % | High parameter sensitivity. |
| Probability increase value of principle 1 (Facilitate Information Exchange) on negotiation | 30 | 10 20 40 | % | High parameter sensitivity. |
| Probability increase value of principle 2 (Implementing Uniform Standards) on learning | 30 | 10 20 40 | % | High parameter sensitivity |
| Probability increase value of principle 2 (Implementing Uniform Standards) on competition | 30 | 10 20 40 | % | High parameter sensitivity. |
| Probability increase value of principle 3 (Enhancing Transparency of Information) on communication | 30 | 10 20 40 | % | High parameter sensitivity. |
| Probability increase value of principle 3 (Enhancing Transparency of Information) on cooperation | 60 | 30 50 70 | % | High parameter sensitivity. |
| Time cycle decrease value of principle 3 (Enhancing Transparency of Information) on cooperation | 4 | 2 3 6 | s | High parameter sensitivity. |
| Probability increase value of principle 4 (Establishing Common Goals) on negotiation | 30 | 10 20 40 | % | High parameter sensitivity. |
| Probability increase value of principle 4 (Establishing Common Goals) on cooperation | 60 | 30 50 70 | % | High parameter sensitivity. |
| Time cycle decrease value of principle 4 (Establishing Common Goals) on cooperation | 4 | 2 3 6 | s | High parameter sensitivity. |
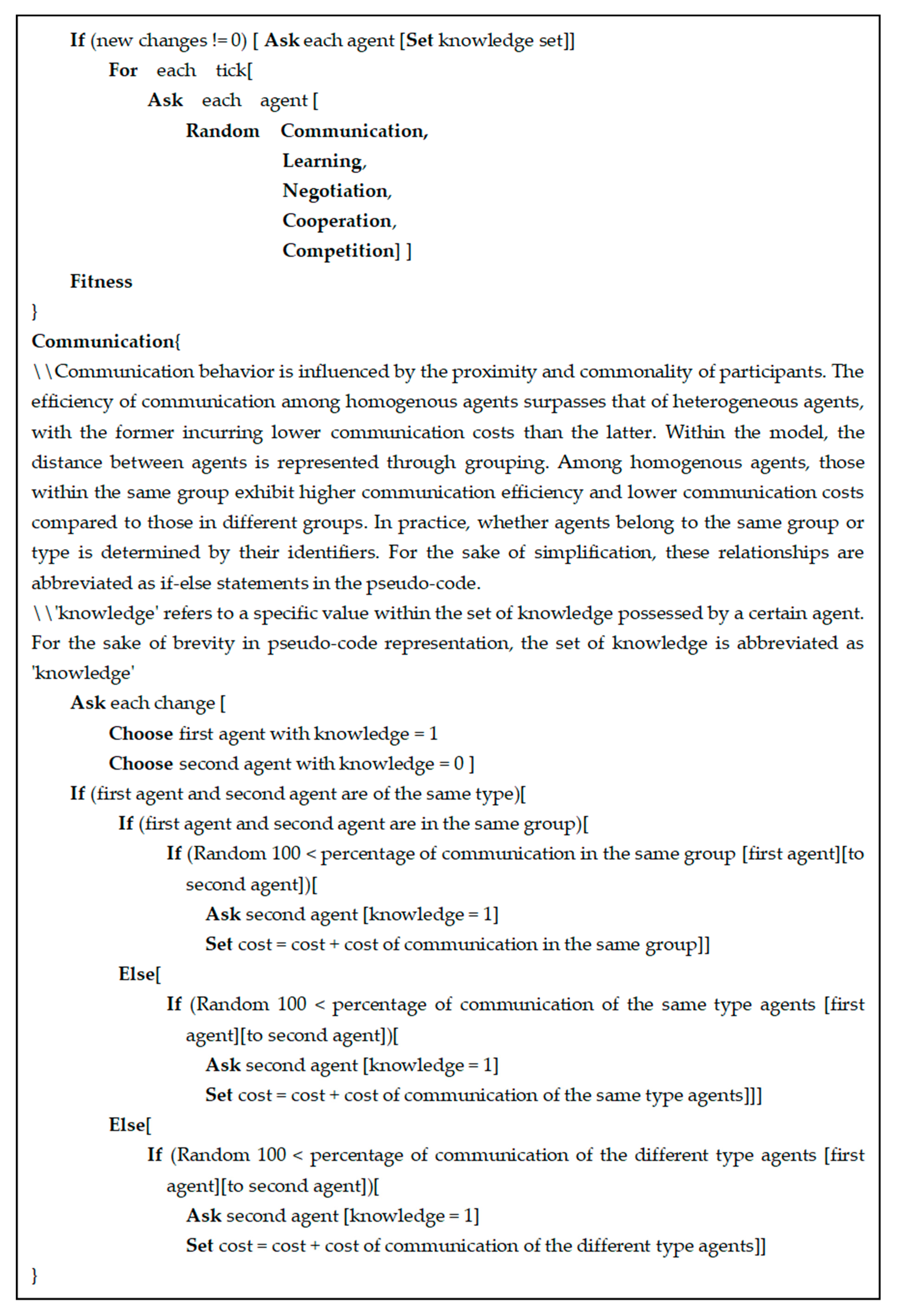
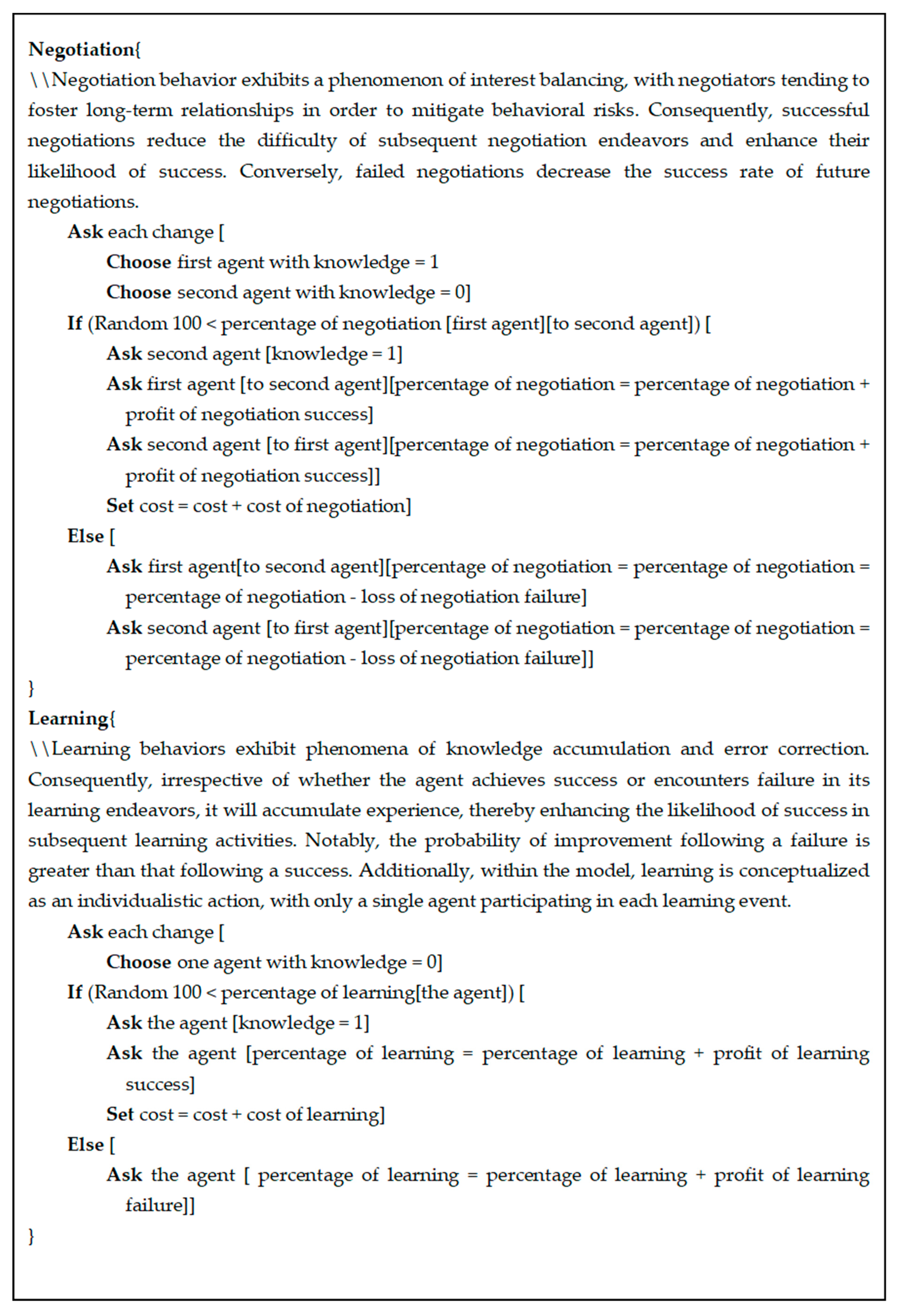
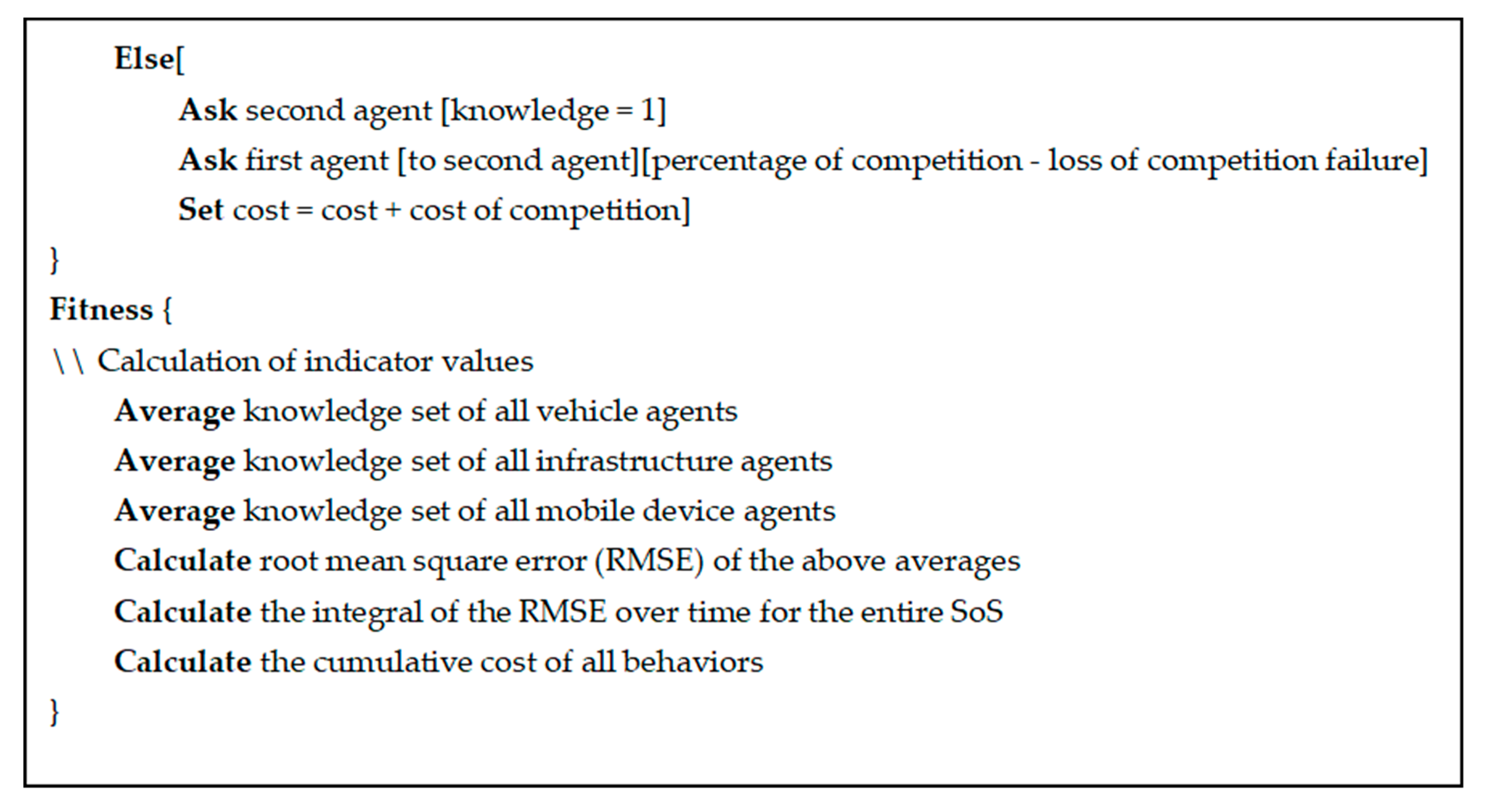
Appendix B. Experimental Pseudo-Code


References
- Selberg, S.A.; Austin, M.A. 10.1. 1 toward an evolutionary system-of-systems architecture. In Proceedings of the INCOSE In-ternational Symposium, Utrecht, The Netherlands, 15–19 June 2008; Volume 18, pp. 1065–1078. [Google Scholar]
- Lock, R. Developing a methodology to support the evolution of system-of-systems using risk analysis. Syst. Eng. 2012, 15, 62–73. [Google Scholar] [CrossRef]
- Carney, D.; Fisher, D.; Place, P. Topics in Interoperability: System-of-Systems Evolution; Carnegie-Mellon University Pittsburgh Pa Software Engineering Institute: Pittsburgh, PA, USA, 2005. [Google Scholar]
- Lane, J.A.; Valerdi, R. Accelerating system-of-systems engineering understanding and optimization through lean enterprise principles. In Proceedings of the 2010 IEEE International Systems Conference, San Diego, CA, USA, 5–8 April 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 196–201. [Google Scholar]
- Nielsen, C.B.; Larsen, P.G.; Fitzgerald, J.; Woodcock, J.; Peleska, J. Systems of systems engineering: Basic concepts, model-based techniques, and research directions. ACM Comput. Surv. (CSUR) 2015, 48, 1–41. [Google Scholar] [CrossRef]
- Hildebrandt, N.; Spillmann, C.M.; Algar, W.R.; Pons, T.; Stewart, M.H.; Oh, E.; Susumu, K.; Díaz, S.A.; Delehanty, J.B.; Medintz, I.L. Energy transfer with semiconductor quantum dot bioconjugates: A versatile platform for biosensing, energy harvesting, and other developing applications. Chem. Rev. 2017, 117, 536–711. [Google Scholar] [CrossRef]
- Forbes, S.A.; Beare, D.; Boutselakis, H.; Bamford, S.; Bindal, N.; Tate, J.; Cole, C.G.; Ward, S.; Dawson, E.; Ponting, L.; et al. COSMIC: Somatic cancer genetics at high-resolution. Nucleic Acids Res. 2017, 45, D777–D783. [Google Scholar] [CrossRef]
- Ott, P.A.; Hu, Z.; Keskin, D.B.; Shukla, S.A.; Sun, J.; Bozym, D.J.; Zhang, W.; Luoma, A.; Giobbie-Hurder, A.; Peter, L.; et al. An immunogenic personal neoantigen vaccine for patients with melanoma. Nature 2017, 547, 217–221. [Google Scholar] [CrossRef] [PubMed]
- Maier, M.W. Architecting principles for systems-of-systems. In Proceedings of the INCOSE 1996 6th Annual International Symposium of the International Council on Systems Engineering, 7–11 July 1996; INCOSE: Boston, MA, USA. [Google Scholar]
- Abbott, R. Open at the top; open at the bottom; and continually (but slowly) evolving. In Proceedings of the 2006 IEEE/SMC International Conference on System-of-Systems Engineering, Los Angeles, CA, USA, 26–28 April 2006; IEEE: Piscataway, NJ, USA, 2006; p. 6. [Google Scholar]
- Bloomfield, R.; Gashi, I. Evaluating the Resilience and Security of Boundaryless, Evolving Socio-Technical Systems of Systems; Tech-nical Report; Centre for Software Reliability, City University: London, UK, 2008. [Google Scholar]
- Carlock, P.G.; Fenton, R.E. system-of-systems (SoS) enterprise systems engineering for information-intensive organizations. Syst. Eng. 2001, 4, 242–261. [Google Scholar] [CrossRef]
- Crossley, W.A. system-of-systems: An introduction of Purdue University schools of engineering’s signature Area. In Engineering Systems Symposium; MIT Engineering Systems Division: Cambridge, MA, USA, 2004. [Google Scholar]
- Despotou, G.; Alexander, R.; Hall-May, M. Key Concepts and Characteristics of Systems of Systems (SoS); DARP-HIRTS; University of York: York, UK, 2003. [Google Scholar]
- Smith, D.; Lewis, G. Systems of Systems: New challenges for maintenance and evolution. In Proceedings of the 2008 Frontiers of Software Maintenance, Beijing, China, 28 September–4 October 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 149–157. [Google Scholar]
- Clausing, D.P.; Andrade, R. Strategic reusability. In Proceedings of the Engineering Design Conference’98, Design Reuse, London, UK, 23–25 June 1998; pp. 98–101. [Google Scholar]
- Vargas, I.G.; Gottardi, T.; Braga, R.T.V. Approaches for integration in system-of-systems: A systematic review. In Proceedings of the 2016 IEEE/ACM 4th International Workshop on Software Engineering for Systems-of-Systems (SESoS), Austin, TX, USA, 16 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 32–38. [Google Scholar]
- Chen, P.; Han, J. Facilitating system-of-systems evolution with architecture support. In Proceedings of the 4th International Workshop on Principles of Software Evolution, Vienna, Austria, 10–11 September 2001; pp. 130–133. [Google Scholar]
- Ackoff, R.L. Towards a system-of-systems concepts. Manag. Sci. 1971, 17, 661–671. [Google Scholar] [CrossRef]
- Clausing, D. Reusability in product development. In Proceedings of the Engineering Design Conference’98, Design Reuse, London, UK, 23–25 June 1998; pp. 57–66. [Google Scholar]
- Sahin, F.; Jamshidi, M.; Sridhar, P. A discrete event xml based simulation framework for system-of-systems architectures. In Proceedings of the 2007 IEEE International Conference on system-of-systems Engineering, San Antonio, TX, USA, 16–18 September 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 1–7. [Google Scholar]
- Kazman, R.; Schmid, K.; Nielsen, C.B.; Klein, J. Understanding patterns for system-of-systems integration. In Proceedings of the 2013, 8th International Conference on system-of-systems Engineering, Maui, HI, USA, 2–6 June 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 141–146. [Google Scholar]
- Baker, J.; Singh, H. The roots of misalignment: Insights from a system dynamics perspective. In Proceedings of the JAIS Theory Development Workshop, Fort Worth, TX, USA, 13 December 2015; pp. 1–37. [Google Scholar]
- Benbya, H.; McKelvey, B. Using coevolutionary and complexity theories to improve IS alignment: A multi-level approach. J. Inf. Technol. 2006, 21, 284–298. [Google Scholar] [CrossRef]
- Tanriverdi, H.; Lim, S.Y. How to survive and thrive in complex, hypercompetitive, and disruptive ecosystems? The roles of IS-enabled capabilities. In Proceedings of the 38th International Conference on Information Systems, Seoul, Republic of Korea, 10–13 December 2017; pp. 1–21. [Google Scholar]
- Besson, P.; Rowe, F. Strategizing information systems-enabled organizational transformation: A transdisciplinary review and new directions. J. Strateg. Inf. Syst. 2012, 21, 103–124. [Google Scholar] [CrossRef]
- Tversky, A.; Kahneman, D. The framing decisions and the psychology of choice. In Question Framing and Response Consistency; Hogarth, R., Ed.; Jossey-Bass Inc.: San Francisco, CA, USA, 1982. [Google Scholar]
- Daft, R.L.; Wiginton, J.C. Language and organization. Acad. Manag. Rev. 1979, 4, 179–191. [Google Scholar] [CrossRef]
- Lind, J. Specifying agent interaction protocols with standard UML. In Proceedings of the International Workshop on Agent-Oriented Software Engineering, Montreal, QC, Canada, 29 May 2001; Springer: Berlin/Heidelberg, Germany, 2001; pp. 136–147. [Google Scholar]
- Schnackenberg, A.K.; Tomlinson, E.C. Organizational transparency: A new perspective on managing trust in organiza-tion-stakeholder relationships. J. Manag. 2016, 42, 1784–1810. [Google Scholar] [CrossRef]
- Akkermans, H.; Bogerd, P.; Van Doremalen, J. Travail, transparency and trust: A case study of computer-supported collaborative supply chain planning in high-tech electronics. Eur. J. Oper. Res. 2004, 153, 445–456. [Google Scholar] [CrossRef]
- Foa, U.G.; Foa, E.B.; Schwarz, L.M. Nonverbal communication: Toward syntax, by way of semantics. J. Nonverbal Behav. 1981, 6, 67–83. [Google Scholar] [CrossRef]
- Calvaresi, D.; Najjar, A.; Winikoff, M.; Främling, K. Explainable, transparent autonomous agents and multi-agent systems. In Proceedings of the Second International Workshop, EXTRAAMAS 2020, Auckland, New Zealand, 9–13 May 2020; Revised Selected Papers. Springer Nature: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- González, A.; Piel, E.; Gross, H.G.; Glandru, M. Testing challenges of maritime safety and security systems-of-systems. In Proceedings of the Testing: Academic & Industrial Conference-Practice and Research Techniques (Taic Part 2008), Windsor, ON, USA, 29–31 August 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 35–39. [Google Scholar]
- Cvitanovic, C.; Colvin, R.M.; Reynolds, K.J.; Platow, M.J. Applying an organizational psychology model for developing shared goals in interdisciplinary research teams. One Earth. 2020, 2, 75–83. [Google Scholar] [CrossRef]
- Ohnuma, S. Consensus building: Process design toward finding a shared recognition of common goal beyond conflicts. In Handbook of Systems Sciences; Springer: Singapore, 2021; pp. 645–662. [Google Scholar]
- de Amorim Silva, R.; Braga, R.T.V. Simulating systems-of-systems with agent-based modeling: A systematic literature review. IEEE Syst. J. 2020, 14, 3609–3617. [Google Scholar] [CrossRef]
- Kinder, A.; Henshaw, M.; Siemieniuch, C. system-of-systems modelling and simulatio—An outlook and open issues. Int. J. Syst. Syst. Eng. 2014, 5, 150–192. [Google Scholar] [CrossRef]
- Amour, A.; Kenley, C.R.; Davendralingam, N.; De Laurentis, D. Agentbased modeling for systems of systems. In Proceedings of the 23nd Annual International Symposium of the International Council of Systems Engineering, Philadelphia, PA, USA, 24–27 June 2013; Volume 1, pp. 250–264. [Google Scholar]
- Tivnan, B.F. Coevolutionary dynamics and agent-based models in organization science. In Proceedings of the 37th Conference on Winter Simulation Conference, Orlando, FL, USA, 4–7 December 2005; pp. 1013–1021. [Google Scholar]
- Peppard, J.; Breu, K. Beyond alignment: A coevolutionary view of the information systems strategy process. In Proceedings of the 24th International Conference on Information Systems, Seattle, WA, USA, 15–17 December 2003; pp. 61–69. [Google Scholar]
- Baldwin, W.C.; Ben-Zvi, T.; Sauser, B.J. Formation of collaborative system-of-systems through belonging choice mechanisms. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2011, 42, 793–801. [Google Scholar] [CrossRef]
- Sindiy, O.V.; DeLaurentis, D.A.; Stein, W.B. An agent-based dynamic model for analysis of distributed space exploration ar-chitectures. J. Astronaut. Sci. 2009, 57, 579–606. [Google Scholar] [CrossRef]
- Nikolic, I.; Dijkema, G.P.J. Framework for understanding and shaping systems of systems the case of industry and infrastructure development in seaport regions. In Proceedings of the 2007 IEEE International Conference on system-of-systems Engineering, San Antonio, TX, USA, 16–18 September 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 1–6. [Google Scholar]
- Grimm, V.; Railsback, S.F.; Vincenot, C.E.; Berger, U.; Gallagher, C.; DeAngelis, D.L.; Edmonds, B.; Ge, J.; Giske, J.; Groeneveld, J.; et al. The ODD Protocol for Describing Agent-Based and Other Simulation Models: A Second Update to Improve Clarity, Replication, and Structural Realism. J. Artif. Soc. Soc. Simul. 2020, 23, 7. [Google Scholar] [CrossRef]
- Alkire, A.A.; Collum, M.E.; Kaswan, J. Information exchange and accuracy of verbal communication under social power conditions. J. Personal. Soc. Psychol. 1968, 9, 301. [Google Scholar] [CrossRef]
- Thompson, L.L. Information exchange in negotiation. J. Exp. Soc. Psychol. 1991, 27, 161–179. [Google Scholar] [CrossRef]
- Maginnis, M.A. The impact of standardization and systematic problem solving on team member learning and its implications for developing sustainable continuous improvement capabilities. J. Enterp. Transform. 2013, 3, 187–210. [Google Scholar] [CrossRef]
- Harrison, G.W.; Rutherford, T.F.; Tarr, D.G. Increased competition and completion of the market in the European Union: Static and steady state effects. J. Econ. Integr. 1996, 11, 332–365. [Google Scholar] [CrossRef]
- Tassey, G. Standardization in technology-based markets. Res. Policy 2000, 29, 587–602. [Google Scholar] [CrossRef]
- Albu, O.B.; Flyverbom, M. Organizational transparency: Conceptualizations, conditions, and consequences. Bus. Soc. 2019, 58, 268–297. [Google Scholar] [CrossRef]
- Michener, G. Gauging the impact of transparency policies. Public Adm. Rev. 2019, 79, 136–139. [Google Scholar] [CrossRef]
- Noveck, B.S. Rights-based and tech-driven: Open data, freedom of information, and the future of government transparency. Yale Hum. Rights Dev. Law J. 2017, 19, 1–45. [Google Scholar]
- Kolleck, N.; Rieck, A.; Yemini, M. Goals aligned: Predictors of common goal identification in educational cross-sectoral col-laboration initiatives. Educ. Manag. Adm. Leadersh. 2020, 48, 916–934. [Google Scholar] [CrossRef]
- Thayer-Bacon, B.J.; Brown, S. What “Collaboration” Means: Ethnocultural Diversity’s Impact; United States Department of Education, Office of Educational Research and Improvement: Washington, DC, USA, 1995. [Google Scholar]
- Weingart, L.R.; Bennett, R.J.; Brett, J.M. The impact of consideration of issues and motivational orientation on group negotiation process and outcome. J. Appl. Psychol. 1993, 78, 504. [Google Scholar] [CrossRef]
- Shendell-Falik, N. The art of negotiation. Prof. Case Manag. 2002, 7, 228–230. [Google Scholar] [CrossRef]
- Lee, J.-S.; Filatova, T.; Ligmann-Zielinska, A.; Hassani-Mahmooei, B.; Stonedahl, F.; Lorscheid, I.; Voinov, A.; Polhill, G.; Sun, Z.; Parker, D.C. The complexities of agent-based modeling output analysis. J. Artif. Soc. Soc. Simul. 2015, 18. [Google Scholar] [CrossRef]
- Bruch, E.; Atwell, J. Agent-based models in empirical social research. Sociol. Methods Res. 2015, 44, 186–221. [Google Scholar] [CrossRef]
- Meluso, J.; Austin-Breneman, J. Gaming the system: An agent-based model of estimation strategies and their effects on system performance. J. Mech. Des. 2018, 140, 121101. [Google Scholar] [CrossRef]
- Sarjoughian, H.S.; Zeigler, B.P.; Hall, S.B. A layered modeling and simulation architecture for agent-based system development. Proc. IEEE 2001, 89, 201–213. [Google Scholar] [CrossRef]
- Crowder, R.M.; Robinson, M.A.; Hughes, H.P.N.; Sim, Y.-W. The development of an agent-based modeling framework for simulating engineering team work. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2012, 42, 1425–1439. [Google Scholar] [CrossRef]
- Fioretti, G. Agent-based simulation models in organization science. Organ. Res. Methods 2013, 16, 227–242. [Google Scholar] [CrossRef]
- Jović, M.; Tijan, E.; Žgaljić, D.; Aksentijević, S. Improving maritime transport sustainability using blockchain-based information exchange. Sustainability 2020, 12, 8866. [Google Scholar] [CrossRef]
- Deng, S.; Zhou, D.; Wu, G.; You, G. Evolutionary game analysis of three parties in logistics platforms and freight transportation companies’ behavioral strategies for horizontal collaboration considering vehicle capacity utilization. Complex Intell. Syst. 2023, 9, 1617–1637. [Google Scholar] [CrossRef]
- Love, T.E.; Ehrenberg, N.; Sapere Research Group. Addressing Unwarranted Variation: Literature Review on Methods for Influencing Practice; Health Quality & Safety Commission: Wellington, New Zealand, 2014. [Google Scholar]
- Hinds, P.J.; Mortensen, M. Understanding conflict in geographically distributed teams: The moderating effects of shared iden-tity, shared context, and spontaneous communication. Organ. Sci. 2005, 16, 290–307. [Google Scholar] [CrossRef]
- Ray, K. One size fits all? Costs and benefits of uniform accounting standards. J. Int. Account. Res. 2018, 17, 1–23. [Google Scholar] [CrossRef]
- Latin, H. Ideal versus real regulatory efficiency: Implementation of uniform standards and fine-tuning regulatory reforms. Stan. L. Rev. 1984, 37, 1267. [Google Scholar] [CrossRef]
- Elmer, C.F. The Economics of Vehicle CO2 Emissions Standards and Fuel Economy Regulations: Rationale, Design, and the Electrification Challenge; Technische Universitaet Berlin: Berlin, Germany, 2016. [Google Scholar]
- Foscht, T.; Lin, Y.; Eisingerich, A.B. Blinds up or down? The influence of transparency, future orientation, and CSR on sus-tainable and responsible behavior. Eur. J. Mark. 2018, 52, 476–498. [Google Scholar] [CrossRef]
- Kumar, N.; Ganguly, K.K. External diffusion of B2B e-procurement and firm financial performance: Role of information transparency and supply chain coordination. J. Enterp. Inf. Manag. 2021, 34, 1037–1060. [Google Scholar] [CrossRef]
- Cheng, M.; Liu, G.; Xu, Y.; Chi, M. Enhancing trust between PPP partners: The role of contractual functions and information transparency. Sage Open 2021, 11, 21582440211038245. [Google Scholar] [CrossRef]
- Lee, U.K. The effect of information deception in price comparison site on the consumer reactions: An empirical verification. Int. J. Distrib. Sens. Netw. 2015, 11, 270685. [Google Scholar] [CrossRef]
- Che, T.; Wu, Z.; Wang, Y.; Yang, R. Impacts of knowledge sourcing on employee innovation: The moderating effect of information transparency. J. Knowl. Manag. 2019, 23, 221–239. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, K.; Xie, J. Bad greenwashing, good greenwashing: Corporate social responsibility and information transparency. Manag. Sci. 2020, 66, 3095–3112. [Google Scholar] [CrossRef]
- Chen, Y.H.; Lin, T.P.; Yen, D.C. How to facilitate inter-organizational knowledge sharing: The impact of trust. Inf. Manag. 2014, 51, 568–578. [Google Scholar] [CrossRef]
- Verberne, F.M.F.; Ham, J.; Midden, C.J.H. Trust in smart systems: Sharing driving goals and giving information to increase trustworthiness and acceptability of smart systems in cars. Hum. Factors 2012, 54, 799–810. [Google Scholar] [CrossRef]
- Li, J.J.; Poppo, L.; Zhou, K.Z. Relational mechanisms, formal contracts, and local knowledge acquisition by international sub-sidiaries. Strateg. Manag. J. 2010, 31, 349–370. [Google Scholar]
- Wang, L.; Song, M.; Zhang, M.; Wang, L. How does contract completeness affect tacit knowledge acquisition? J. Knowl. Manag. 2021, 25, 989–1005. [Google Scholar] [CrossRef]
- Wang, N.; Huang, Y.; Fu, Y.; Chen, L. Does lead userness matter for electric vehicle adoption? An integrated perspective of social capital and domain-specific innovativeness. J. Consum. Behav. 2022, 21, 1405–1419. [Google Scholar] [CrossRef]
- Hayek, F.A. The counter-revolution of science. Economica 1941, 8, 281–320. [Google Scholar] [CrossRef]
- Popper, K. The Logic of Scientific Discovery; Routledge: Abingdon-on-Thames, UK, 2005. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Liu, J.; Zhang, M. Effective Evolutionary Principles for System-of-Systems: Insights from Agent-Based Modeling in Vehicular Networks. Systems 2024, 12, 98. https://doi.org/10.3390/systems12030098
Liu J, Liu J, Zhang M. Effective Evolutionary Principles for System-of-Systems: Insights from Agent-Based Modeling in Vehicular Networks. Systems. 2024; 12(3):98. https://doi.org/10.3390/systems12030098
Chicago/Turabian StyleLiu, Junjie, Junxian Liu, and Mengmeng Zhang. 2024. "Effective Evolutionary Principles for System-of-Systems: Insights from Agent-Based Modeling in Vehicular Networks" Systems 12, no. 3: 98. https://doi.org/10.3390/systems12030098
APA StyleLiu, J., Liu, J., & Zhang, M. (2024). Effective Evolutionary Principles for System-of-Systems: Insights from Agent-Based Modeling in Vehicular Networks. Systems, 12(3), 98. https://doi.org/10.3390/systems12030098