Electrical Impedance of Upper Limb Enables Robust Wearable Identity Recognition against Variation in Finger Placement and Environmental Factors



Abstract
1. Introduction
2. Results and Discussion
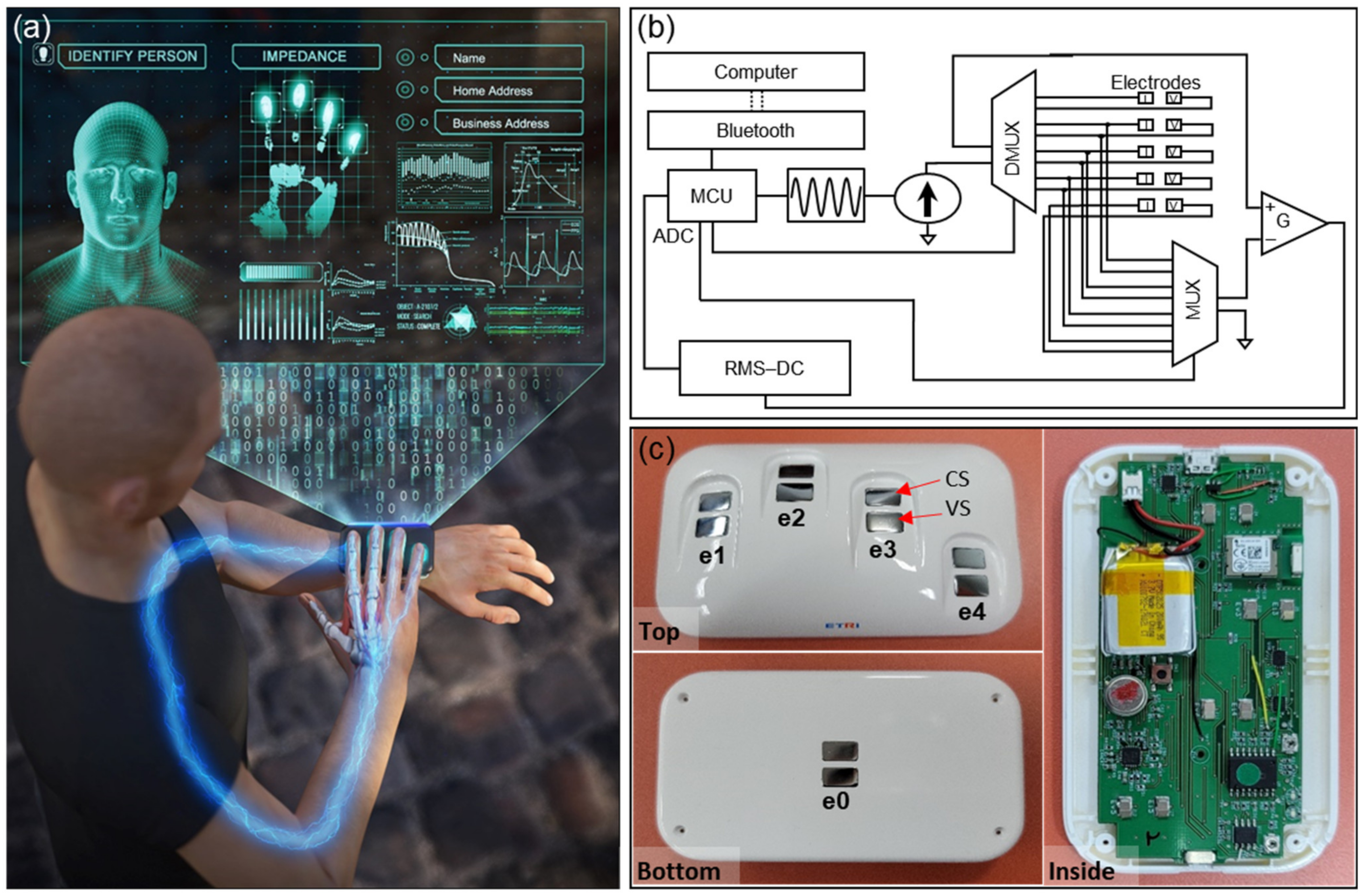
2.1. Impedance-Based Wireless Wearable Identity Recognition System
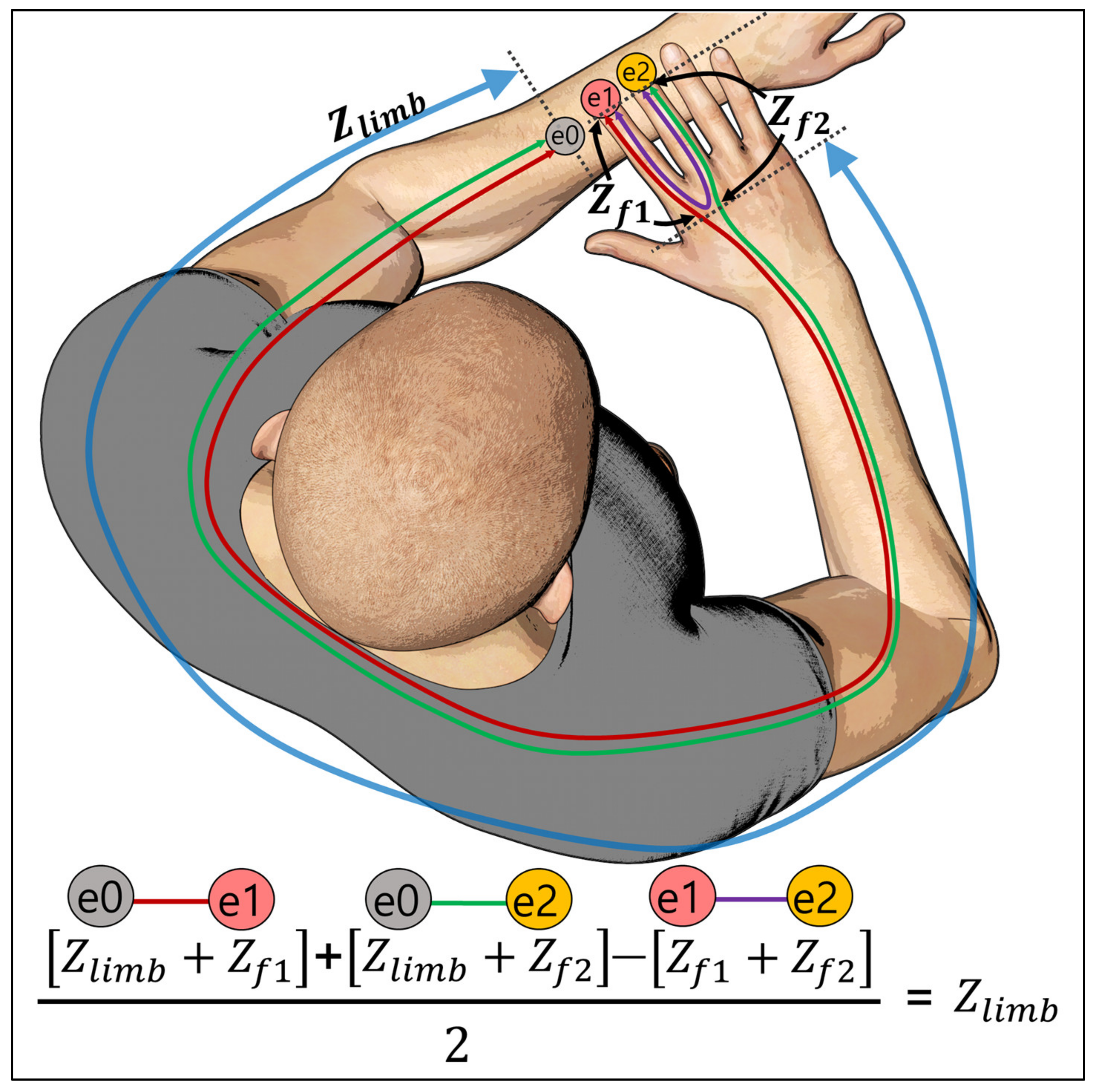
2.2. The Principle of Proposed Upper Limb Feature Extraction
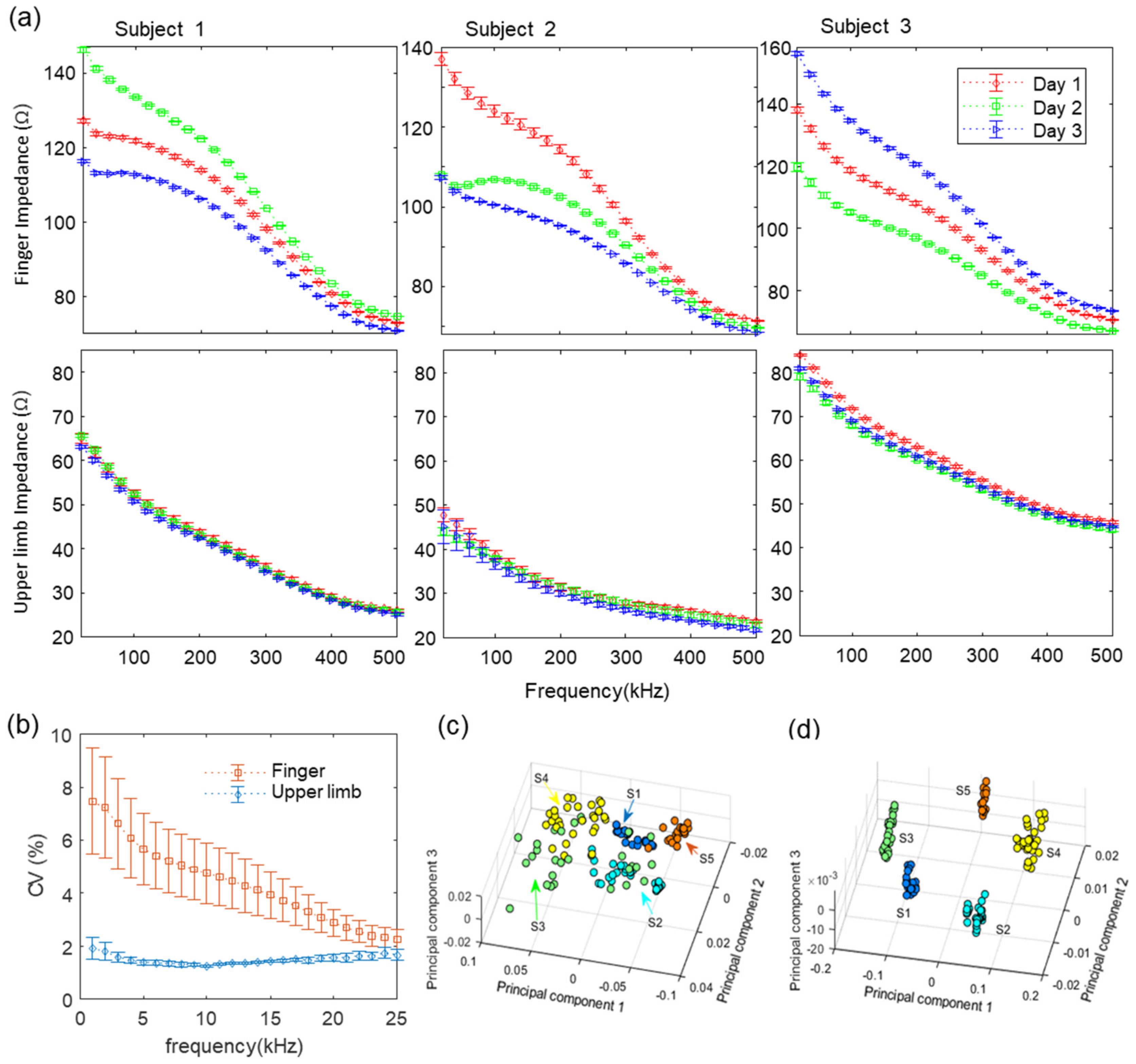
2.3. Robust Features in Upper Limb against Thermal Environments
2.4. Enhanced Upper Limb Features Reducing Undesirable Variation
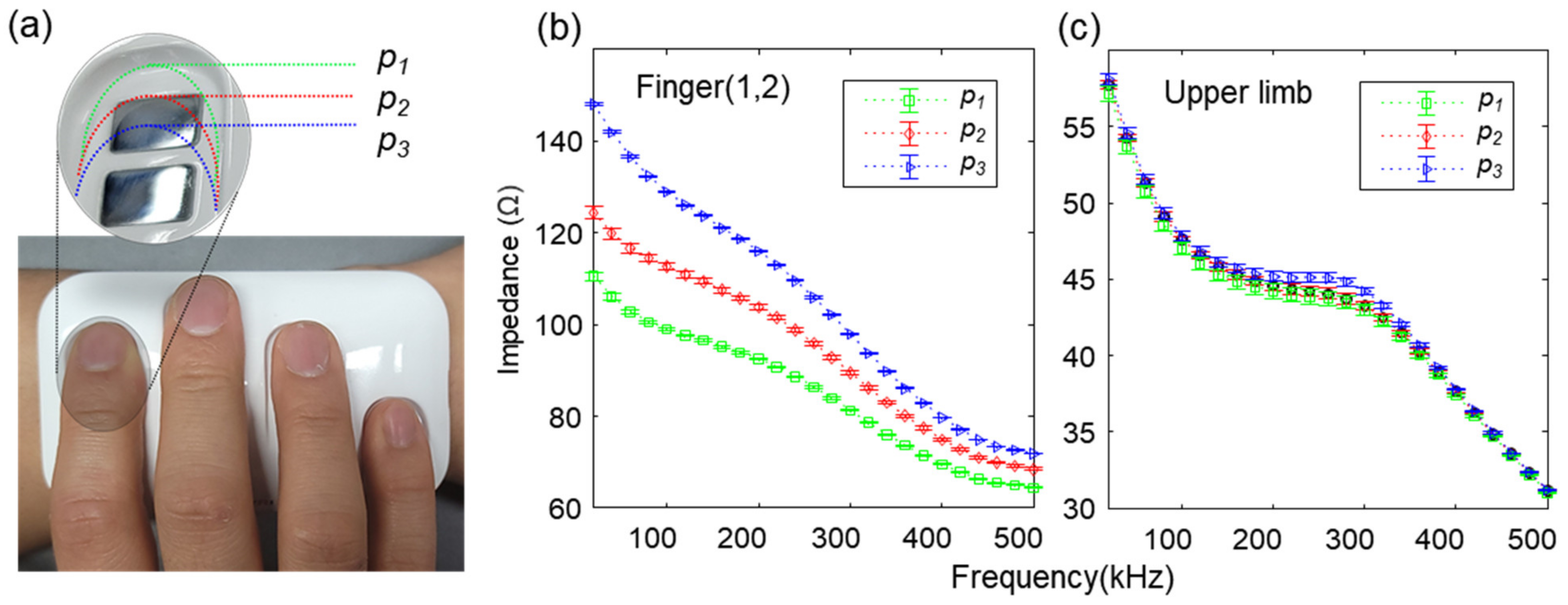
2.5. Robust Upper Limb Features against Finger Placement Variation
2.6. Improved Identity Recognition Performance via Upper Limb Features
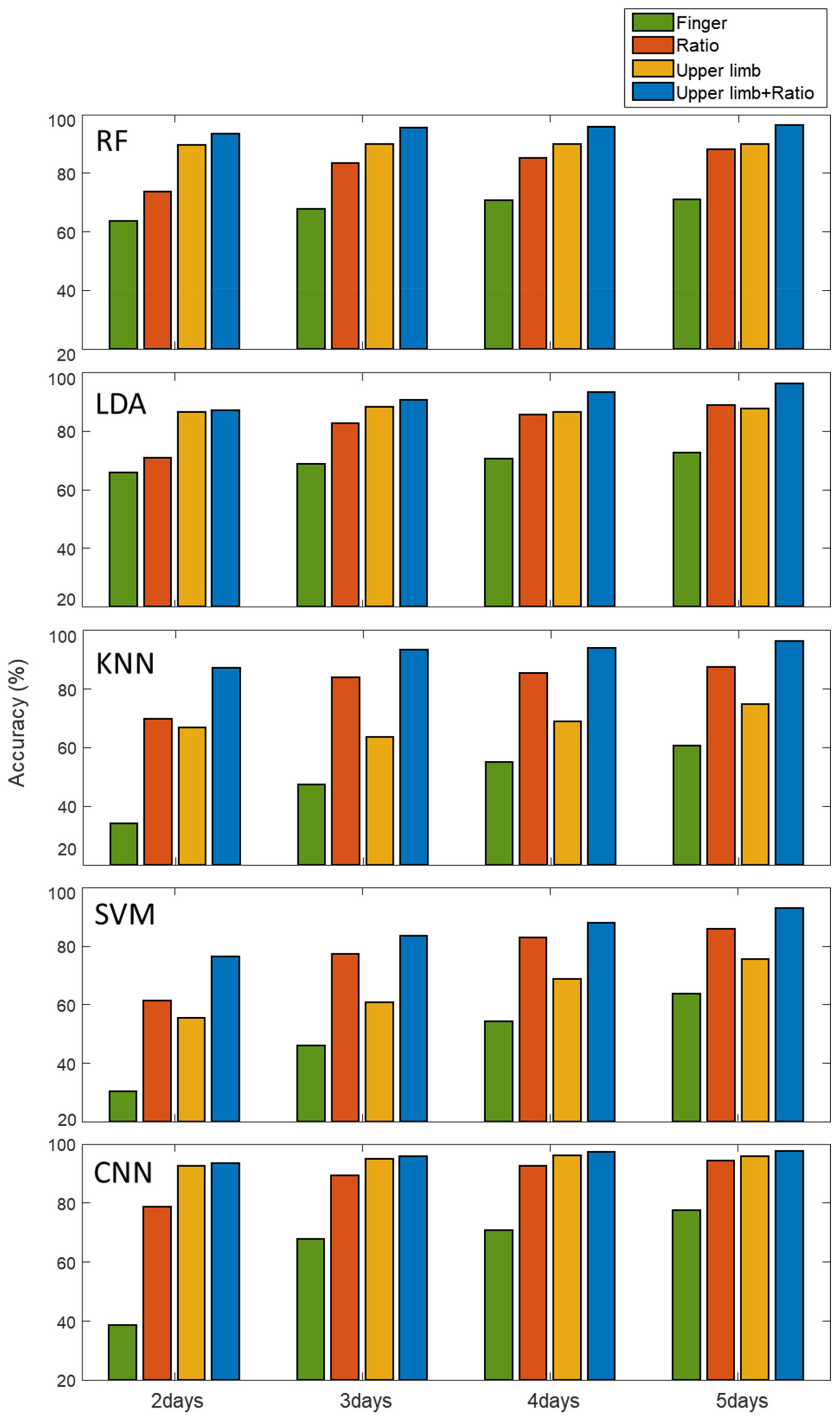
2.7. Comparison of Performance with Increasing Date of Measurement and Type of Feature Used
2.8. Scalability Analysis
3. Conclusions
4. Materials and Methods
4.1. Impedance-Based Wireless Wearable Identity Recognition System
4.2. Human Measurement of Wearable Electrical Impedance Spectrum
4.3. Upper Limb Impedance Features
4.4. Ratiometric Features
4.5. Recognition of Individuals
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rinaldi, A. Biometrics’ New Identity—Measuring More Physical and Biological Traits. EMBO Rep. 2016, 17, 22–26. [Google Scholar] [CrossRef]
- Prabhakar, S.; Pankanti, S.; Jain, A.K. Biometric Recognition: Security and Privacy Concerns. IEEE Secur. Priv. 2003, 1, 33–42. [Google Scholar] [CrossRef]
- Jain, A.K.; Ross, A.; Prabhakar, S. An Introduction to Biometric Recognition. IEEE Trans. Circuits Syst. Video Technol. 2004, 14, 4–20. [Google Scholar] [CrossRef]
- Abuhamad, M.; Abusnaina, A.; Nyang, D.; Mohaisen, D. Sensor-Based Continuous Authentication of Smartphones’ Users Using Behavioral Biometrics: A Contemporary Survey. IEEE Internet Things J. 2021, 8, 65–84. [Google Scholar] [CrossRef]
- Patel, V.M.; Ratha, N.K.; Chellappa, R. Cancelable Biometrics: A Review. IEEE Signal Process. Mag. 2015, 32, 54–65. [Google Scholar] [CrossRef]
- Pałka, N.; Kowalski, M. Terahertz Detection of Fingerprint Spoofing. In Proceedings of the 2020 45th International Conference on Infrared, Millimeter, and Terahertz Waves (IRMMW-THz), New York, NY, USA, 8–13 November 2020; pp. 1–2. [Google Scholar]
- Bowyer, K.W.; Doyle, J.S. Cosmetic Contact Lenses and Iris Recognition Spoofing. Computer 2014, 47, 96–98. [Google Scholar]
- Fratini, A.; Sansone, M.; Bifulco, P.; Cesarelli, M. Individual Identification via Electrocardiogram Analysis. Biomed. Eng. Online 2015, 14, 78. [Google Scholar] [CrossRef] [PubMed]
- PG, K.; Holi, M.S. Electromyography Analysis for Person Identification. Int. J. Biom. Bioinform. 2011, 5, 172. [Google Scholar]
- Abo-Zahhad, M.; Ahmed, S.M.; Abbas, S.N. A New EEG Acquisition Protocol for Biometric Identification Using Eye Blinking Signals. Int. J. Intell. Syst. Appl. 2015, 7, 48. [Google Scholar] [CrossRef]
- Del Pozo-Banos, M.; Alonso, J.B.; Ticay-Rivas, J.R.; Travieso, C.M. Electroencephalogram Subject Identification: A Review. Expert Syst. Appl. 2014, 41, 6537–6554. [Google Scholar] [CrossRef]
- Komeili, M.; Louis, W.; Armanfard, N.; Hatzinakos, D. On Evaluating Human Recognition Using Electrocardiogram Signals: From Rest to Exercise. In Proceedings of the 2016 IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), Vancouver, BC, Canada, 15–18 May 2016; pp. 1–4. [Google Scholar]
- Wahabi, S.; Pouryayevali, S.; Hari, S.; Hatzinakos, D. On Evaluating ECG Biometric Systems: Session-Dependence and Body Posture. IEEE Trans. Inf. Forensics Secur. 2014, 9, 2002–2013. [Google Scholar] [CrossRef]
- Teixeira, J.; Vinhas, V.; Oliveira, E.; Reis, L.P. A New Approach to Emotion Assessment Based on Biometric Data. In Proceedings of the 2008 IEEE/WIC/ACM International Conference on Web Intelligence and Intelligent Agent Technology, Washington, DC, USA, 9–12 December 2008; Volume 3, pp. 505–511. [Google Scholar]
- Okereafor, K.; Onime, C.; Osuagwu, O. Enhancing Biometric Liveness Detection Using Trait Randomization Technique. In Proceedings of the 2017 UKSim-AMSS 19th International Conference on Computer Modelling & Simulation (UKSim), Cambridge, UK, 5–7 April 2017; pp. 28–33. [Google Scholar]
- Babu, A.; Paul, V.; Baby, D.E. An Investigation of Biometric Liveness Detection Using Various Techniques. In Proceedings of the 2017 International Conference on Inventive Systems and Control (ICISC), Coimbatore, India, 19–20 January 2017; pp. 1–5. [Google Scholar]
- Seoane, F.; Mohino-Herranz, I.; Ferreira, J.; Alvarez, L.; Buendia, R.; Ayllón, D.; Llerena, C.; Gil-Pita, R. Wearable Biomedical Measurement Systems for Assessment of Mental Stress of Combatants in Real Time. Sensors 2014, 14, 7120–7141. [Google Scholar] [CrossRef] [PubMed]
- Boushey, C.J.; Coulston, A.M.; Rock, C.L.; Monsen, E. Nutrition in the Prevention and Treatment of Disease; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Cornelius, C. Usable Security for Wireless Body-Area Networks; Dartmouth College: Hanover, NH, USA, 2013. [Google Scholar]
- Bera, T.K. Bioelectrical Impedance Methods for Noninvasive Health Monitoring: A Review. J. Med. Eng. 2014, 2014, 381251. [Google Scholar] [CrossRef]
- Netter, F.H. Atlas of Human Anatomy; Rittenhouse Book Distributors Inc: King of Prussia, PA, USA, 1997. [Google Scholar]
- Liu, J.; Qiang, Y.; Alvarez, O.; Du, E. Electrical Impedance Microflow Cytometry with Oxygen Control for Detection of Sickle Cells. Sens. Actuators B Chem. 2018, 255, 2392–2398. [Google Scholar] [CrossRef] [PubMed]
- Fein, A.; Grossman, R.F.; Jones, J.G.; Goodman, P.C.; Murray, J.F. Evaluation of Transthoracic Electrical Impedance in the Diagnosis of Pulmonary Edema. Circulation 1979, 60, 1156–1160. [Google Scholar] [CrossRef]
- Bera, T.K.; Nagaraju, J. Electrical Impedance Spectroscopic Studies on Broiler Chicken Tissue Suitable for the Development of Practical Phantoms in Multifrequency EIT. J. Electr. Bioimpedance 2011, 2, 48–63. [Google Scholar] [CrossRef]
- Bauchot, A.D.; Harker, F.R.; Arnold, W.M. The Use of Electrical Impedance Spectroscopy to Assess the Physiological Condition of Kiwifruit. Postharvest Biol. Technol. 2000, 18, 9–18. [Google Scholar] [CrossRef]
- Cornelius, C.; Peterson, R.; Skinner, J.; Halter, R.; Kotz, D. A Wearable System That Knows Who Wears It; ACM Press: New York, NY, USA, 2014; pp. 55–67. [Google Scholar]
- Cornelius, C.; Sorber, J.; Peterson, R.; Skinner, J.; Halter, R.; Kotz, D. Who Wears Me? Bioimpedance as a Passive Biometric. In Proceedings of the 3rd USENIX conference on Health Security and Privacy, Bellevue, WA, USA, 6–7 August 2012; p. 4. [Google Scholar]
- Ackmann, J.J. Complex Bioelectric Impedance Measurement System for the Frequency Range from 5 Hz to 1 MHz. Ann. Biomed. Eng. 1993, 21, 135–146. [Google Scholar] [CrossRef] [PubMed]
- Ackmann, J.J.; Seitz, M.A. Methods of Complex Impedance Measurements in Biologic Tissue. Crit. Rev. Biomed. Eng. 1984, 11, 281–311. [Google Scholar]
- Cha, K.; Chertow, G.M.; Gonzalez, J.; Lazarus, J.M.; Wilmore, D.W. Multifrequency Bioelectrical Impedance Estimates the Distribution of Body Water. J. Appl. Physiol. 1995, 79, 1316–1319. [Google Scholar] [CrossRef] [PubMed]
- Lim, C.E.D.; Wong, W.; Smith, W. Factors Influencing the Bio-Impedance Data in Tissue Segments along the Three Arm Meridians: A Pilot Study. TANG 2011, 1, 7.1–7.9. [Google Scholar] [CrossRef][Green Version]
- Buono, M.J.; Burke, S.; Endemann, S.; Graham, H.; Gressard, C.; Griswold, L.; Michalewicz, B. The Effect of Ambient Air Temperature on Whole-Body Bioelectrical Impedance. Physiol. Meas. 2004, 25, 119–123. [Google Scholar] [CrossRef]
- O’brien, C.; Young, A.J.; Sawka, M.N. Bioelectrical Impedance to Estimate Changes in Hydration Status. Int. J. Sports Med. 2002, 23, 361–366. [Google Scholar] [CrossRef] [PubMed]
- Lukaski, H.C. Biological Indexes Considered in the Derivation of the Bioelectrical Impedance Analysis. Am. J. Clin. Nutr. 1996, 64, 397S–404S. [Google Scholar] [CrossRef]
- Caton, J.R.; Molé, P.A.; Adams, W.C.; Heustis, D.S. Body Composition Analysis by Bioelectrical Impedance: Effect of Skin Temperature. Med. Sci. Sports Exerc. 1988, 20, 489–491. [Google Scholar] [CrossRef] [PubMed]
- Deurenberg, P.; Weststrate, J.A.; Paymans, I.; van der Kooy, K. Factors Affecting Bioelectrical Impedance Measurements in Humans. Eur. J. Clin. Nutr. 1988, 42, 1017–1022. [Google Scholar]
- Liang, M.T.C.; Norris, S. Effects of Skin Blood Flow and Temperature on Bioelectric Impedance after Exercise. Med. Sci. Sports Exerc. 1993, 25, 1231–1239. [Google Scholar] [CrossRef]
- Gudivaka, R.; Schoeller, D.; Kushner, R.F. Effect of Skin Temperature on Multifrequency Bioelectrical Impedance Analysis. J. Appl. Physiol. 1996, 81, 838–845. [Google Scholar] [CrossRef]
- Noh, H.W.; Ahn, C.-G.; Kong, H.-J.; Sim, J.Y. Ratiometric Impedance Sensing of Fingers for Robust Identity Authentication. Sci. Rep. 2019, 9, 1–12. [Google Scholar] [CrossRef]
- Ferrara, M.; Maltoni, D.; Cappelli, R. Noninvertible Minutia Cylinder-Code Representation. IEEE Trans. Inf. Forensics Secur. 2012, 7, 1727–1737. [Google Scholar] [CrossRef]
- Schroff, F.; Kalenichenko, D.; Philbin, J. Facenet: A Unified Embedding for Face Recognition and Clustering. In Proceedings of the IEEE conference on computer vision and pattern recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 815–823. [Google Scholar]
- Lenhardt, R.; Sessler, D.I. Estimation of Mean Body Temperature from Mean Skin and Core Temperature. Anesthesiology 2006, 105, 1117–1121. [Google Scholar] [CrossRef]
- Zhang, H.; Huizenga, C.; Arens, E.; Wang, D. Human Thermal Sensation and Comfort in Transient and Non-Uniform Thermal Environments. Eur. J. Appl. Physiol. 2004, 92, 728–733. [Google Scholar] [CrossRef]
- Arens, E.A.; Zhang, H. The Skin’s Role in Human Thermoregulation and Comfort; Woodhead Publishing Ltd.: Cambridge, UK, 2006. [Google Scholar]
- Arens, E.; Zhang, H.; Huizenga, C. Partial- and Whole-Body Thermal Sensation and Comfort—Part I: Uniform Environmental Conditions. J. Therm. Biol. 2006, 31, 53–59. [Google Scholar] [CrossRef]
- Khalil, S.F.; Mohktar, M.S.; Ibrahim, F. The Theory and Fundamentals of Bioimpedance Analysis in Clinical Status Monitoring and Diagnosis of Diseases. Sensors 2014, 14, 10895–10928. [Google Scholar] [CrossRef]
- Nickerson, B.S.; Esco, M.R.; Bishop, P.A.; Kliszczewicz, B.M.; Williford, H.N.; Park, K.-S.; Welborn, B.A.; Snarr, R.L.; Tolusso, D.V. Effects of Heat Exposure on Body Water Assessed Using Single-Frequency Bioelectrical Impedance Analysis and Bioimpedance Spectroscopy. Int. J. Exerc. Sci. 2017, 10, 1085–1093. [Google Scholar]
- Davydov, D.M.; Boev, A.; Gorbunov, S. Making the Choice between Bioelectrical Impedance Measures for Body Hydration Status Assessment. Sci. Rep. 2021, 11, 7685. [Google Scholar] [CrossRef]
- Ray, T.; Choi, J.; Reeder, J.; Lee, S.P.; Aranyosi, A.J.; Ghaffari, R.; Rogers, J.A. Soft, Skin-Interfaced Wearable Systems for Sports Science and Analytics. Curr. Opin. Biomed. Eng. 2019, 9, 47–56. [Google Scholar] [CrossRef]
- Yang, W.; Wang, S.; Sahri, N.M.; Karie, N.M.; Ahmed, M.; Valli, C. Biometrics for Internet-of-Things Security: A Review. Sensors 2021, 21, 6163. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Liu, M.; Bai, Y.; Zhang, J.; Liu, H.; Zhu, W. Recent Progress in Flexible Wearable Sensors for Vital Sign Monitoring. Sensors 2020, 20, 4009. [Google Scholar] [CrossRef]
- Kim, H.; Kim, H.; Chun, S.Y.; Kang, J.-H.; Oakley, I.; Lee, Y.; Ryu, J.O.; Kim, M.J.; Park, I.K.; Hong, H.K.; et al. A Wearable Wrist Band-Type System for Multimodal Biometrics Integrated with Multispectral Skin Photomatrix and Electrocardiogram Sensors. Sensors 2018, 18, 2738. [Google Scholar] [CrossRef] [PubMed]
- Blasco, J.; Chen, T.M.; Tapiador, J.; Peris-Lopez, P. A Survey of Wearable Biometric Recognition Systems. ACM Comput. Surv. 2016, 49, 43:1–43:35. [Google Scholar] [CrossRef]
- Jain, A.; Hong, L.; Pankanti, S. Biometric Identification. Commun. ACM 2000, 43, 90–98. [Google Scholar] [CrossRef]
- An, B.W.; Shin, J.H.; Kim, S.-Y.; Kim, J.; Ji, S.; Park, J.; Lee, Y.; Jang, J.; Park, Y.-G.; Cho, E.; et al. Smart Sensor Systems for Wearable Electronic Devices. Polymers 2017, 9, 303. [Google Scholar] [CrossRef]
- Cömert, A.; Hyttinen, J. Investigating the Possible Effect of Electrode Support Structure on Motion Artifact in Wearable Bioelectric Signal Monitoring. Biomed. Eng. Online 2015, 14, 44. [Google Scholar] [CrossRef]
- Heikenfeld, J.; Jajack, A.; Rogers, J.; Gutruf, P.; Tian, L.; Pan, T.; Li, R.; Khine, M.; Kim, J.; Wang, J.; et al. Wearable Sensors: Modalities, Challenges, and Prospects. Lab. Chip 2018, 18, 217–248. [Google Scholar] [CrossRef]
- Tang, Y.; Chang, R.; Zhang, L.; Yan, F.; Ma, H.; Bu, X. Electrode Humidification Design for Artifact Reduction in Capacitive ECG Measurements. Sensors 2020, 20, 3449. [Google Scholar] [CrossRef] [PubMed]
- Uhl, A.; Wild, P. Comparing Verification Performance of Kids and Adults for Fingerprint, Palmprint, Hand-Geometry and Digitprint Biometrics. In Proceedings of the 2009 IEEE 3rd International Conference on Biometrics: Theory, Applications, and Systems, Washington, DC, USA, 28–30 September 2009; pp. 1–6. [Google Scholar]
- Elliott, D.A. Chapter 202—Nutritional Assessment. In Small Animal Critical Care Medicine; Silverstein, D.C., Hopper, K., Eds.; W.B. Saunders: Saint Louis, MO, USA, 2009; pp. 856–859. ISBN 978-1-4160-2591-7. [Google Scholar]
- Taylor, N.A.; Machado-Moreira, C.; van den Heuvel, A.; Caldwell, J.; Taylor, E.A.; Tipton, M.J. The Roles of Hands and Feet in Temperature Regulation in Hot and Cold Environments. In Proceedings of the 13th International Conference on Environmental Ergonomics, Boston, MA, USA, 2–7 August 2009; pp. 405–409. [Google Scholar]
- House, J.R.; Tipton, M.J. Heat strain is reduced at different rates with hand, foot, forearm or lower leg cooling. In Elsevier Ergonomics Book Series; Elsevier: Amsterdam, The Netherlands, 2005; Volume 3, pp. 91–95. [Google Scholar]
- Fu, Y.; Zhao, J.; Dong, Y.; Wang, X. Dry Electrodes for Human Bioelectrical Signal Monitoring. Sensors 2020, 20, 3651. [Google Scholar] [CrossRef]
- Nam, D.; Cha, J.M.; Park, K. Next-Generation Wearable Biosensors Developed with Flexible Bio-Chips. Micromachines 2021, 12, 64. [Google Scholar] [CrossRef] [PubMed]
- Huizenga, C.; Zhang, H.; Arens, E.; Wang, D. Skin and Core Temperature Response to Partial- and Whole-Body Heating and Cooling. J. Therm. Biol. 2004, 29, 549–558. [Google Scholar] [CrossRef]
- Taylor, N.A.; Machado-Moreira, C.; van den Heuvel, A.; Caldwell, J.; Haley, C.; Kerry, P. The Hand: Physiological Characteristics That Impact upon Temperature Regulation and Thermal Comfort; UOW-HPL-Report-032; Human Performance Laboratories, University of Wollongong: Wollongong NSW, Australia; W.L. Gore & Associates GmbH: Putzbrunn, Germany, 2008; pp. 1–155. [Google Scholar]
- Pélabon, C.; Hilde, C.H.; Einum, S.; Gamelon, M. On the Use of the Coefficient of Variation to Quantify and Compare Trait Variation. Evol. Lett. 2020, 4, 180–188. [Google Scholar] [CrossRef] [PubMed]
- Kareem, N. What Is the Difference between Test Set and Validation Set. Retrieved Sept. 2014, 6, 2015. [Google Scholar]
- Newbie Question: Confused about Train, Validation and Test Data! Heaton Research. Available online: https://web.archive.org/web/20150314221014/http://www.heatonresearch.com/node/1823 (accessed on 23 May 2021).
- Akhtar, Z.; Micheloni, C.; Foresti, G.L. Biometric Liveness Detection: Challenges and Research Opportunities. IEEE Secur. Priv. 2015, 13, 63–72. [Google Scholar] [CrossRef]
- Goljan, M.; Fridrich, J.; Chen, M. Defending Against Fingerprint-Copy Attack in Sensor-Based Camera Identification. IEEE Trans. Inf. Forensics Secur. 2011, 6, 227–236. [Google Scholar] [CrossRef]
- Menotti, D.; Chiachia, G.; Pinto, A.; Schwartz, W.R.; Pedrini, H.; Falcao, A.X.; Rocha, A. Deep Representations for Iris, Face, and Fingerprint Spoofing Detection. IEEE Trans. Inf. Forensics Secur. 2015, 10, 864–879. [Google Scholar] [CrossRef]
- Cheng, Y.; Larin, K.V. Artificial Fingerprint Recognition by Using Optical Coherence Tomography with Autocorrelation Analysis. Appl. Opt. 2006, 45, 9238. [Google Scholar] [CrossRef]
- Galbally, J.; Marcel, S.; Fierrez, J. Image Quality Assessment for Fake Biometric Detection: Application to Iris, Fingerprint, and Face Recognition. IEEE Trans. Image Process. 2014, 23, 710–724. [Google Scholar] [CrossRef] [PubMed]
- Franco, S. Design with Operational Amplifiers and Analog Integrated Circuits, 3rd ed.; McGraw-Hill Series in Electrical and Computer Engineering; McGraw-Hill: New York, NY, USA, 2002; ISBN 978-0-07-232084-8. [Google Scholar]
- Tucker, A.S. A Noninvasive Device for the Detection and Measurement of Intra-Abdominal Hemorrhage. Ph.D. Thesis, University of Florida, Gainesville, FL, USA, 2011. [Google Scholar]
- McEwan, A.; Cusick, G.; Holder, D.S. A Review of Errors in Multi-Frequency EIT Instrumentation. Physiol. Meas. 2007, 28, S197. [Google Scholar] [CrossRef]
- Schluchter, A.J. A 16-Channel Electrical Impedance Tomography System Using the Red Pitaya; University of California: San Diego, CA, USA, 2020. [Google Scholar]
- Broggi, G.; Franzini, A. Value of Serial Stereotactic Biopsies and Impedance Monitoring in the Treatment of Deep Brain Tumours. J. Neurol. Neurosurg. Psychiatry 1981, 44, 397–401. [Google Scholar] [CrossRef]
- Oh, T.; Gilad, O.; Ghosh, A.; Schuettler, M.; Holder, D.S. A Novel Method for Recording Neuronal Depolarization with Recording at 125–825 Hz: Implications for Imaging Fast Neural Activity in the Brain with Electrical Impedance Tomography. Med. Biol. Eng. Comput. 2011, 49, 593–604. [Google Scholar] [CrossRef]
- International Electrotechnical Commission. IEC 60601-1:2005, Medical Electrical Equipment—Part 1: General Requirements for Basic Safety and Essential Performance; IEC: London, UK, 2005. [Google Scholar]
- Bioelectrical Impedance Measurements at Various Frequencies to Estimate Human Body Compositions. Bodystat 2013, 35, 159–161.
- Wan, C.S.; Ward, L.C.; Halim, J.; Gow, M.L.; Ho, M.; Briody, J.N.; Leung, K.; Cowell, C.T.; Garnett, S.P. Bioelectrical Impedance Analysis to Estimate Body Composition, and Change in Adiposity, in Overweight and Obese Adolescents: Comparison with Dual-Energy x-Ray Absorptiometry. BMC Pediatr. 2014, 14, 249. [Google Scholar] [CrossRef] [PubMed]
- Medici, G.; Mussi, C.; Fantuzzi, A.; Malavolti, M.; Albertazzi, A.; Bedogni, G. Accuracy of Eight-Polar Bioelectrical Impedance Analysis for the Assessment of Total and Appendicular Body Composition in Peritoneal Dialysis Patients. Eur. J. Clin. Nutr. 2005, 59, 932–937. [Google Scholar] [CrossRef]
- Dotsinsky, I. Handbook of Physics in Medicine and Biology. Biomed. Eng. Online 2010, 9. [Google Scholar] [CrossRef]
- Sim, J.Y.; Noh, H.W.; Goo, W.; Kim, N.; Chae, S.-H.; Ahn, C.-G. Identity Recognition Based on Bioacoustics of Human Body. IEEE Trans. Cybern. 2019, 51, 2761–2772. [Google Scholar] [CrossRef]
- Acevedo, M.A.; Corrada-Bravo, C.J.; Corrada-Bravo, H.; Villanueva-Rivera, L.J.; Aide, T.M. Automated Classification of Bird and Amphibian Calls Using Machine Learning: A Comparison of Methods. Ecol. Inform. 2009, 4, 206–214. [Google Scholar] [CrossRef]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R. An Introduction to Statistical Learning: With Applications in R; Springer: New York, NY, USA, 2013; ISBN 978-1-4614-7137-0. [Google Scholar]
- Ali, N.; Neagu, D.; Trundle, P. Evaluation of K-Nearest Neighbour Classifier Performance for Heterogeneous Data Sets. SN Appl. Sci. 2019, 1, 1559. [Google Scholar] [CrossRef]
- Salamon, J.; Bello, J.P. Deep Convolutional Neural Networks and Data Augmentation for Environmental Sound Classification. IEEE Signal Process. Lett. 2017, 24, 279–283. [Google Scholar] [CrossRef]
- Zhu, W.; Ma, Y.; Zhou, Y.; Benton, M.; Romagnoli, J. Deep Learning Based Soft Sensor and Its Application on a Pyrolysis Reactor for Compositions Predictions of Gas Phase Components. In Computer Aided Chemical Engineering; Eden, M.R., Ierapetritou, M.G., Towler, G.P., Eds.; Elsevier: Amsterdam, The Netherlands, 2018; Volume 44, pp. 2245–2250. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accuracy (%) | EER (%) | AUC | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Feature | Finger | Ratio | u-Limb | Ratio + u-Limb | Finger | Ratio | u-Limb | Ratio + u-Limb | Finger | Ratio | u-Limb | Ratio + u-Limb | |
| Classifier | |||||||||||||
| RF | 70.83 | 88.21 | 89.98 | 96.43 | 7.5460 | 2.1570 | 3.0275 | 0.6050 | 0.9793 | 0.9974 | 0.9968 | 0.9998 | |
| LDA | 72.53 | 88.75 | 87.52 | 96.00 | 6.6380 | 3.0731 | 3.0117 | 1.3022 | 0.9826 | 0.9930 | 0.9947 | 0.9967 | |
| kNN | 60.66 | 87.46 | 74.86 | 96.31 | 20.2827 | 6.4651 | 12.9619 | 1.9015 | 0.7972 | 0.9353 | 0.8704 | 0.9810 | |
| SVM | 63.55 | 85.74 | 75.29 | 92.99 | 12.7228 | 3.7646 | 6.2097 | 2.7668 | 0.9500 | 0.9938 | 0.9872 | 0.9970 | |
| CNN | 77.62 | 94.40 | 95.70 | 97.60 | 5.0524 | 1.1063 | 0.9834 | 0.4917 | 0.9891 | 0.9990 | 0.9993 | 0.9999 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Noh, H.W.; Sim, J.Y.; Ahn, C.-G.; Ku, Y. Electrical Impedance of Upper Limb Enables Robust Wearable Identity Recognition against Variation in Finger Placement and Environmental Factors. Biosensors 2021, 11, 398. https://doi.org/10.3390/bios11100398
Noh HW, Sim JY, Ahn C-G, Ku Y. Electrical Impedance of Upper Limb Enables Robust Wearable Identity Recognition against Variation in Finger Placement and Environmental Factors. Biosensors. 2021; 11(10):398. https://doi.org/10.3390/bios11100398
Chicago/Turabian StyleNoh, Hyung Wook, Joo Yong Sim, Chang-Geun Ahn, and Yunseo Ku. 2021. "Electrical Impedance of Upper Limb Enables Robust Wearable Identity Recognition against Variation in Finger Placement and Environmental Factors" Biosensors 11, no. 10: 398. https://doi.org/10.3390/bios11100398
APA StyleNoh, H. W., Sim, J. Y., Ahn, C.-G., & Ku, Y. (2021). Electrical Impedance of Upper Limb Enables Robust Wearable Identity Recognition against Variation in Finger Placement and Environmental Factors. Biosensors, 11(10), 398. https://doi.org/10.3390/bios11100398