

Synergizing Machine Learning Algorithm with Triboelectric Nanogenerators for Advanced Self-Powered Sensing Systems




Abstract
1. Introduction
2. Working Mechanism of TENG
2.1. Working Mechanism of S-S TENG
2.2. Working Mechanism of L-S TENG
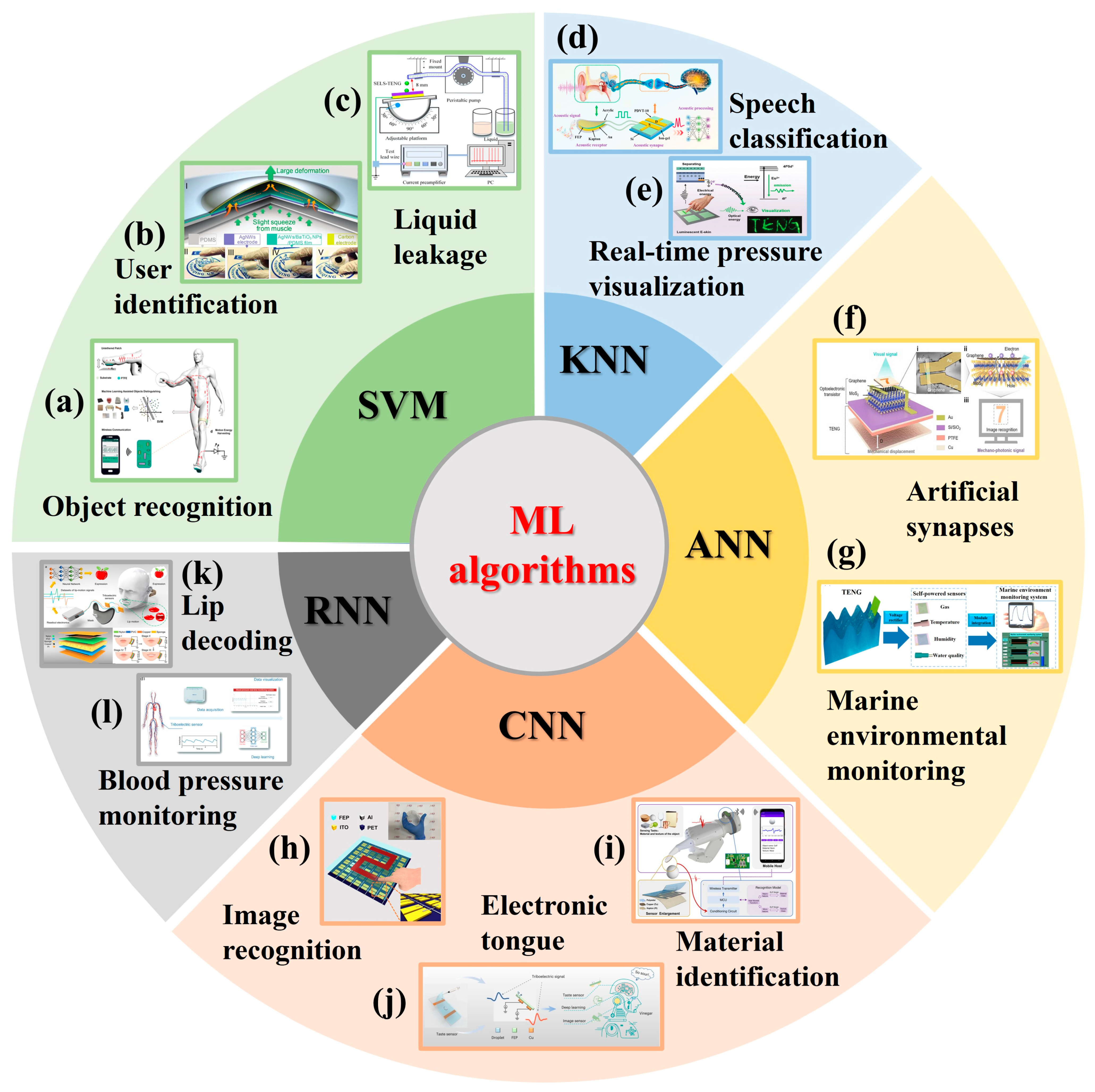
3. ML for TENGs
3.1. ML Algorithms for Small Datasets
3.1.1. SVM for TENGs
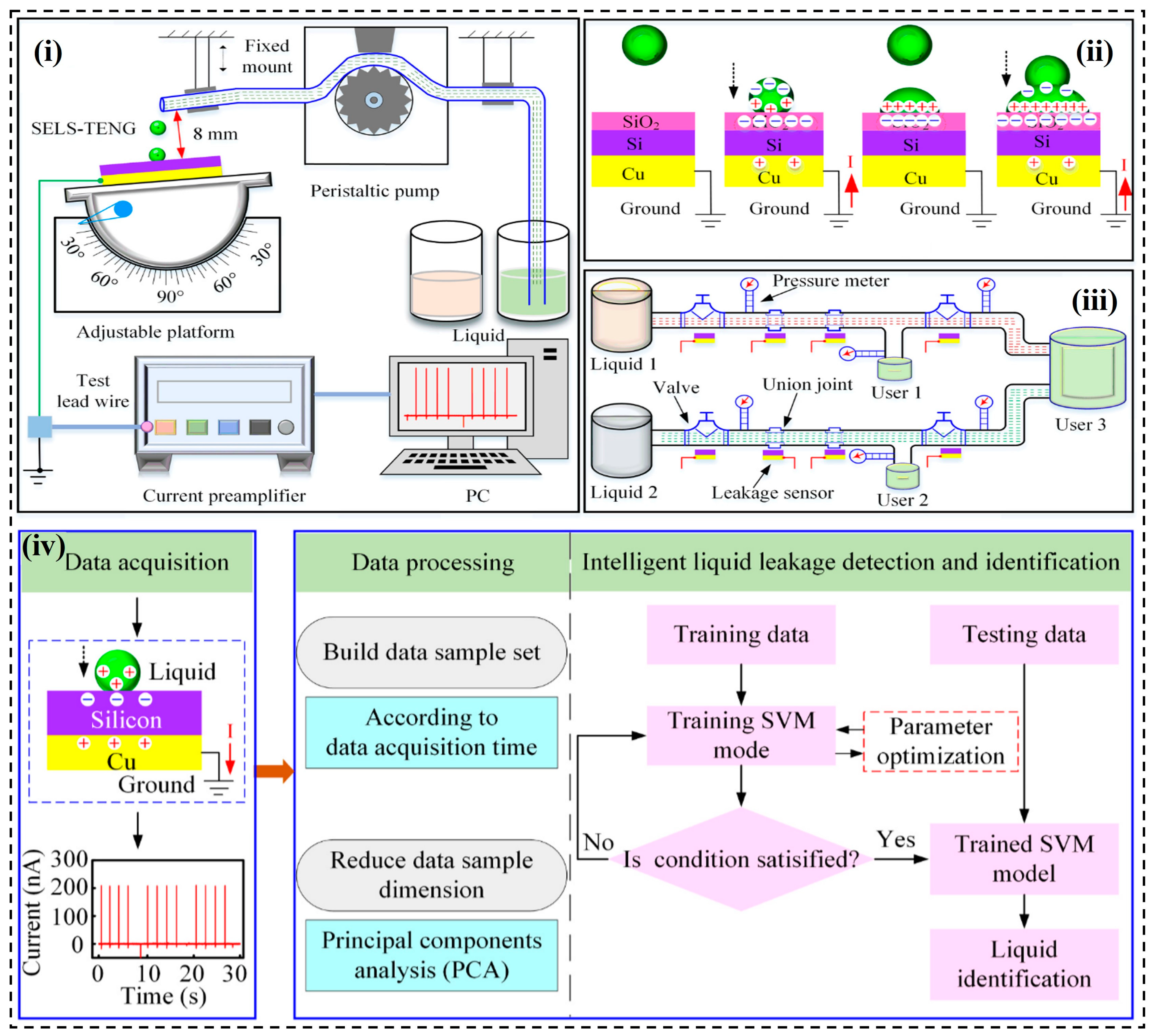
SVM for S-S TENGs
SVM for L-S TENGs
3.1.2. KNN for TENGs
3.2. DL Algorithms for Large-Scale Datasets
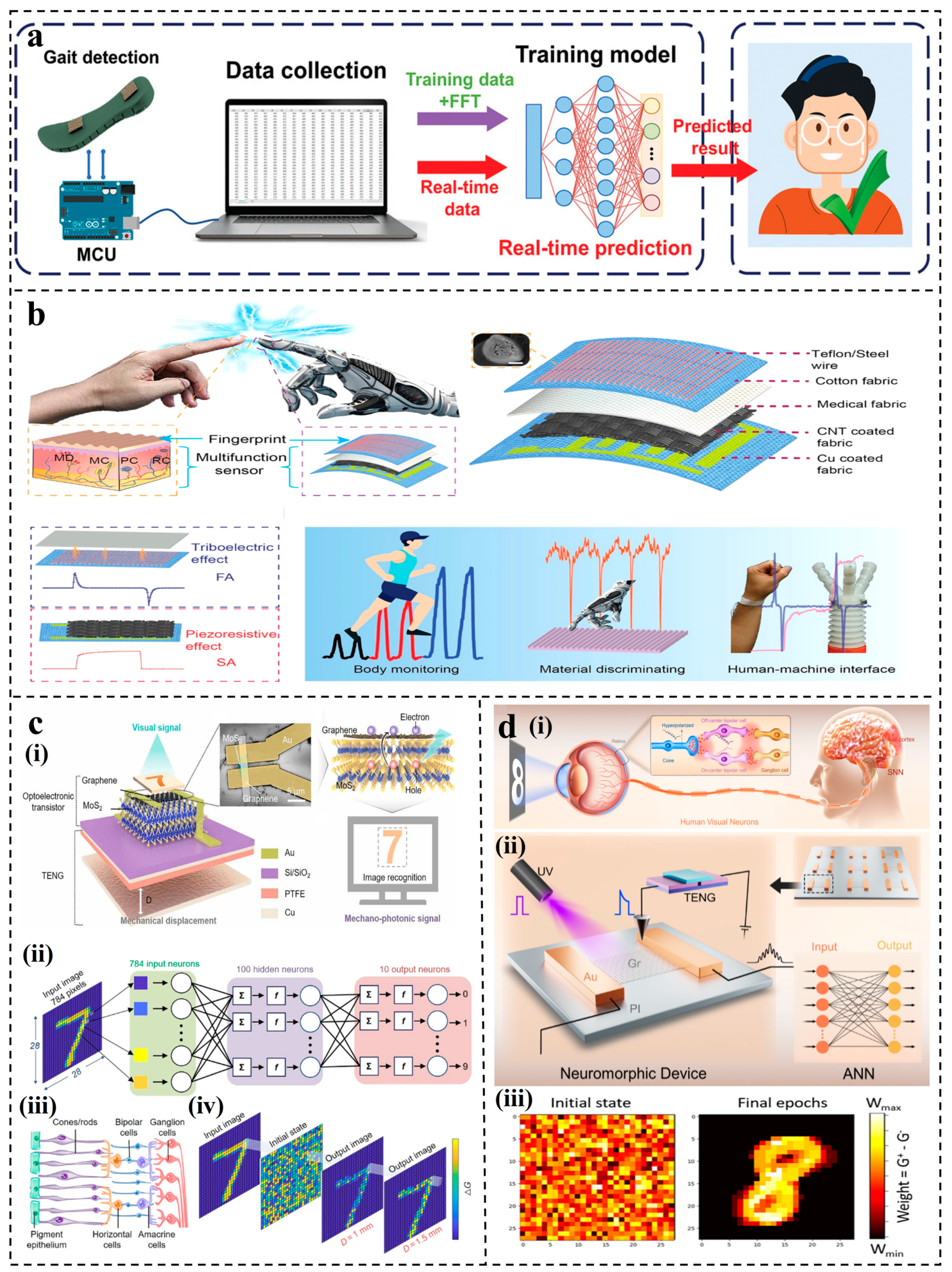
3.2.1. ANN for TENGs
ANN for S-S TENGs
ANN for L-S TENGs
3.2.2. CNN for TENGs
CNN for S-S TENGs
CNN for L-S TENGs
3.2.3. RNN for TENGs
3.3. Comparison of Key Parameters
4. Conclusions and Prospects
- Improve the data acquisition capability of TENGs. Develop G-S, G-L, L-L, or composite TENG structures [174,175]. Hybrid nanogenerators can collect high-quality and more comprehensive signals under complex environmental conditions. The improvement of the data acquisition capability ensures that ML algorithms achieve better learning effects in training and testing. Additionally, since ML is highly dependent on data, it is essential to develop TENGs with stable output to guarantee data quality. This can be achieved by selecting triboelectric materials or structures with better durability [176].
- Optimize the algorithms. When the existing algorithms cannot meet the deployment requirements of large-scale triboelectric sensors, new ML algorithms can be developed based on the specific data characteristics of TENGs. On the other hand, the integration of multiple DL algorithms, such as using multi-modal information [177] or multi-task learning [178] methods, can improve the data processing ability of the system. In addition, the algorithm models should learn human environmental perception, emotional preferences, and the ability to avoid disadvantages. Reinforcement learning [179] is an effective strategy to adapt to dynamic environmental conditions by cultivating the interaction between agent and environment to learn the best decision.
- Multi-domain applications. Knowledge in different fields can provide more optimization schemes for TENG sensing systems. Intelligent sensing systems gain more knowledge reserves and key technologies in different human activities, which help the machine to more comprehensively imitate the perception, thinking, decision-making, and collaboration capabilities of the human brain [180].
- Optimize energy harvesting. The energy harvesting functionality of TENGs can also benefit from algorithmic assistance [181]. Utilizing ML to optimize the energy management of triboelectric sensors enables more efficient energy harvesting and utilization. This optimization enhances the stability and sustainability of the sensor, reducing energy waste.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zanella, A.; Bui, N.; Castellani, A.; Vangelista, L.; Zorzi, M. Internet of Things for Smart Cities. IEEE Internet Things J. 2014, 1, 22–32. [Google Scholar] [CrossRef]
- Zhou, Y.; Shen, M.; Cui, X.; Shao, Y.; Li, L.; Zhang, Y. Triboelectric Nanogenerator Based Self-Powered Sensor for Artificial Intelligence. Nano Energy 2021, 84, 105887. [Google Scholar] [CrossRef]
- Lin, R.; Kim, H.-J.; Achavananthadith, S.; Kurt, S.A.; Tan, S.C.C.; Yao, H.; Tee, B.C.K.; Lee, J.K.W.; Ho, J.S. Wireless Battery-Free Body Sensor Networks Using near-Field-Enabled Clothing. Nat. Commun. 2020, 11, 444. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.L. Triboelectric Nanogenerator (TENG)—Sparking an Energy and Sensor Revolution. Adv. Energy Mater. 2020, 10, 2000137. [Google Scholar] [CrossRef]
- Fan, F.-R.; Tian, Z.-Q.; Lin Wang, Z. Flexible Triboelectric Generator. Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Li, X.; Wei, D.; Wang, Z.L. Direct Current Triboelectric Nanogenerators, a Perspective from Material Selections. Nanoenergy Adv. 2023, 3, 343–375. [Google Scholar] [CrossRef]
- Ouyang, Y.; Li, X.; Li, S.; Peng, P.; Yang, F.; Wang, Z.L.; Wei, D. Opto-Iontronic Coupling in Triboelectric Nanogenerator. Nano Energy 2023, 116, 108796. [Google Scholar] [CrossRef]
- Li, X.; Li, S.; Guo, X.; Shao, J.; Wang, Z.L.; Wei, D. Triboiontronics for Efficient Energy and Information Flow. Matter 2023, 6, 3912–3926. [Google Scholar] [CrossRef]
- Moin, A.; Zhou, A.; Rahimi, A.; Menon, A.; Benatti, S.; Alexandrov, G.; Tamakloe, S.; Ting, J.; Yamamoto, N.; Khan, Y.; et al. A Wearable Biosensing System with In-Sensor Adaptive Machine Learning for Hand Gesture Recognition. Nat. Electron. 2020, 4, 54–63. [Google Scholar] [CrossRef]
- Lacks, D.J.; Shinbrot, T. Long-Standing and Unresolved Issues in Triboelectric Charging. Nat. Rev. Chem. 2019, 3, 465–476. [Google Scholar] [CrossRef]
- Zhang, Z.; He, T.; Zhu, M.; Sun, Z.; Shi, Q.; Zhu, J.; Dong, B.; Yuce, M.R.; Lee, C. Deep Learning-Enabled Triboelectric Smart Socks for IoT-Based Gait Analysis and VR Applications. npj Flex. Electron. 2020, 4, 29. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, J.; Zhang, Y.; Zhu, R. A Wearable Motion Capture Device Able to Detect Dynamic Motion of Human Limbs. Nat. Commun. 2020, 11, 5615. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Xie, Z.; Yue, H.; Lu, Y.; Yang, F. A Triboelectric Multifunctional Sensor Based on the Controlled Buckling Structure for Motion Monitoring and Bionic Tactile of Soft Robots. Nano Energy 2022, 104, 107845. [Google Scholar] [CrossRef]
- Fang, Y.; Zou, Y.; Xu, J.; Chen, G.; Zhou, Y.; Deng, W.; Zhao, X.; Roustaei, M.; Hsiai, T.K.; Chen, J. Ambulatory Cardiovascular Monitoring Via a Machine-Learning-Assisted Textile Triboelectric Sensor. Adv. Mater. 2021, 33, 2104178. [Google Scholar] [CrossRef] [PubMed]
- Qu, X.; Liu, Z.; Tan, P.; Wang, C.; Liu, Y.; Feng, H.; Luo, D.; Li, Z.; Wang, Z.L. Artificial Tactile Perception Smart Finger for Material Identification Based on Triboelectric Sensing. Sci. Adv. 2022, 8, eabq2521. [Google Scholar] [CrossRef] [PubMed]
- Zhou, H.; Huang, W.; Xiao, Z.; Zhang, S.; Li, W.; Hu, J.; Feng, T.; Wu, J.; Zhu, P.; Mao, Y. Deep-Learning-Assisted Noncontact Gesture-Recognition System for Touchless Human-Machine Interfaces. Adv. Funct. Mater. 2022, 32, 2208271. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, W.; Yan, Y.; Wu, X.; Wang, X.; Zhou, Y.; Hu, Y.; Chen, H.; Guo, T. Self-Powered High-Sensitivity Sensory Memory Actuated by Triboelectric Sensory Receptor for Real-Time Neuromorphic Computing. Nano Energy 2020, 75, 104930. [Google Scholar] [CrossRef]
- Nahian, S.A.; Cheedarala, R.K.; Ahn, K.K. A Study of Sustainable Green Current Generated by the Fluid-Based Triboelectric Nanogenerator (FluTENG) with a Comparison of Contact and Sliding Mode. Nano Energy 2017, 38, 447–456. [Google Scholar] [CrossRef]
- Pal, A.; Chatterjee, S.; Saha, S.; Barman, S.R.; Choi, D.; Lee, S.; Lin, Z.-H. A Highly Sensitive Mercury Ion Sensor Based on Solid-Liquid Contact Electrification. ECS J. Solid State Sci. Technol. 2020, 9, 115029. [Google Scholar] [CrossRef]
- Liu, J.; Wen, Z.; Lei, H.; Gao, Z.; Sun, X. A Liquid–Solid Interface-Based Triboelectric Tactile Sensor with Ultrahigh Sensitivity of 21.48 kPa−1. Nano-Micro Lett. 2022, 14, 88. [Google Scholar] [CrossRef]
- Zhang, X.; Dong, Y.; Xu, X.; Qin, H.; Wang, D. A New Strategy for Tube Leakage and Blockage Detection Using Bubble Motion-Based Solid-Liquid Triboelectric Sensor. Sci. China Technol. Sci. 2022, 65, 282–292. [Google Scholar] [CrossRef]
- Chatterjee, S.; Saha, S.; Barman, S.R.; Khan, I.; Pao, Y.-P.; Lee, S.; Choi, D.; Lin, Z.-H. Enhanced Sensing Performance of Triboelectric Nanosensors by Solid-Liquid Contact Electrification. Nano Energy 2020, 77, 105093. [Google Scholar] [CrossRef]
- Wang, D.; Zhao, J.; Zhang, F.; Claesson, P.; Pan, J.; Shi, Y. In-Situ Coating Wear Condition Monitoring Based on Solid-Liquid Triboelectric Nanogenerator and Its Mechanism Study. Nano Energy 2023, 112, 108479. [Google Scholar] [CrossRef]
- Liang, C.; Jiao, C.; Gou, H.; Luo, H.; Diao, Y.; Han, Y.; Gan, F.; Zhang, D.; Wu, X. Facile Construction of Electrochemical and Self-Powered Wearable Pressure Sensors Based on Metallic Corrosion Effects. Nano Energy 2022, 104, 107954. [Google Scholar] [CrossRef]
- Zhong, M.; Zhang, L.; Liu, X.; Zhou, Y.; Zhang, M.; Wang, Y.; Yang, L.; Wei, D. Wide Linear Range and Highly Sensitive Flexible Pressure Sensor Based on Multistage Sensing Process for Health Monitoring and Human-Machine Interfaces. Chem. Eng. J. 2021, 412, 128649. [Google Scholar] [CrossRef]
- Kim, M.; Yang, J.; Kim, D.; Yun, D. Soft Tactile Sensor to Detect the Slip of a Robotic Hand. Measurement 2022, 200, 111615. [Google Scholar] [CrossRef]
- Scaffaro, R.; Maio, A.; Citarrella, M.C. Ionic Tactile Sensors as Promising Biomaterials for Artificial Skin: Review of Latest Advances and Future Perspectives. Eur. Polym. J. 2021, 151, 110421. [Google Scholar] [CrossRef]
- Dai, C.; Ye, C.; Ren, J.; Yang, S.; Cao, L.; Yu, H.; Liu, S.; Shao, Z.; Li, J.; Chen, W.; et al. Humanoid Ionotronic Skin for Smart Object Recognition and Sorting. ACS Mater. Lett. 2023, 5, 189–201. [Google Scholar] [CrossRef]
- Zhong, X.; Sun, P.; Wei, R.; Dong, H.; Jiang, S. Object Recognition by a Heat-Resistant Core-Sheath Triboelectric Nanogenerator Sensor. J. Mater. Chem. A 2022, 10, 15080–15088. [Google Scholar] [CrossRef]
- Das, S.P.; Bhuyan, R.; Baro, B.; Das, U.; Sharma, R.; Bayan, S. Flexible Triboelectric Nanogenerators of Au-g-C3N4/ZnO Hierarchical Nanostructures for Machine Learning Enabled Body Movement Detection. Nanotechnology 2023, 34, 445501. [Google Scholar] [CrossRef]
- Jiang, Y.; An, J.; Liang, F.; Zuo, G.; Yi, J.; Ning, C.; Zhang, H.; Dong, K.; Wang, Z.L. Knitted Self-Powered Sensing Textiles for Machine Learning-Assisted Sitting Posture Monitoring and Correction. Nano Res. 2022, 15, 8389–8397. [Google Scholar] [CrossRef]
- Zhou, B.; Liu, J.; Huang, X.; Qiu, X.; Yang, X.; Shao, H.; Tang, C.; Zhang, X. Mechanoluminescent-Triboelectric Bimodal Sensors for Self-Powered Sensing and Intelligent Control. Nano-Micro Lett. 2023, 15, 72. [Google Scholar] [CrossRef] [PubMed]
- Ye, G.; Jin, T.; Wang, X.; Chen, Y.; Wu, Q.; Wan, Y.; Yang, P. Multimodal Integrated Flexible Electronic Skin for Physiological Perception and Contactless Kinematics Pattern Recognition. Nano Energy 2023, 113, 108580. [Google Scholar] [CrossRef]
- Wang, N.; Liu, Y.; Ye, E.; Li, Z.; Wang, D. Contact Electrification Behaviors of Solid–Liquid Interface: Regulation, Mechanisms, and Applications. Adv. Energy Sustain. Res. 2023, 4, 2200186. [Google Scholar] [CrossRef]
- Deng, Y.; Meng, G.; Tai, Y.; Liu, Z. Noncontact Liquid–Solid Nanogenerators as Self-Powered Droplet Sensors. J. Mater. Sci. Mater. Electron. 2023, 34, 1033. [Google Scholar] [CrossRef]
- Song, Z.; Zhang, X.; Wang, Z.; Ren, T.; Long, W.; Cheng, T.; Wang, Z.L. Nonintrusion Monitoring of Droplet Motion State via Liquid–Solid Contact Electrification. ACS Nano 2021, 15, 18557–18565. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Zheng, Y.; Wang, D.; Rahman, Z.U.; Zhou, F. Liquid–Solid Contact Triboelectrification and Its Use in Self-Powered Nanosensor for Detecting Organics in Water. Nano Energy 2016, 30, 321–329. [Google Scholar] [CrossRef]
- Hu, S.; Ding, X.; Fan, B.; Zhang, C.; Zhang, B.; Shi, X.; Peng, Z. Position Sensing of Jetting Droplets Enabled by Triboelectric Nanogenerators. Nano Energy 2023, 109, 108289. [Google Scholar] [CrossRef]
- Li, X.; Zhang, L.; Feng, Y.; Zheng, Y.; Wu, Z.; Zhang, X.; Wang, N.; Wang, D.; Zhou, F. Reversible Temperature-Sensitive Liquid–Solid Triboelectrification with Polycaprolactone Material for Wetting Monitoring and Temperature Sensing. Adv. Funct. Mater. 2021, 31, 2010220. [Google Scholar] [CrossRef]
- Shi, Q.; Wang, H.; Wang, T.; Lee, C. Self-Powered Liquid Triboelectric Microfluidic Sensor for Pressure Sensing and Finger Motion Monitoring Applications. Nano Energy 2016, 30, 450–459. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, Y.; Gao, Q.; Bao, G.; Cheng, T.; Wang, Z.L. Triboelectric Fluid Sensors: Principles, Development, and Perspectives. Adv. Mater. Technol. 2023, 8, 2201029. [Google Scholar] [CrossRef]
- Chen, X.W.; Lin, X. Big Data Deep Learning: Challenges and Perspectives. IEEE Access 2014, 2, 514–525. [Google Scholar] [CrossRef]
- Fulkerson, B. Machine Learning, Neural and Statistical Classification. Technometrics 1995, 37, 459. [Google Scholar] [CrossRef]
- Lee, J.H.; Heo, J.S.; Kim, Y.; Eom, J.; Jung, H.J.; Kim, J.; Kim, I.; Park, H.; Mo, H.S.; Kim, Y.; et al. A Behavior-Learned Cross-Reactive Sensor Matrix for Intelligent Skin Perception. Adv. Mater. 2020, 32, 2000969. [Google Scholar] [CrossRef] [PubMed]
- Yao, H.; Wang, Z.; Wu, Y.; Zhang, Y.; Miao, K.; Cui, M.; Ao, T.; Zhang, J.; Ban, D.; Zheng, H. Intelligent Sound Monitoring and Identification System Combining Triboelectric Nanogenerator-Based Self-Powered Sensor with Deep Learning Technique. Adv. Funct. Mater. 2022, 32, 2112155. [Google Scholar] [CrossRef]
- Sánchez A, V.D. Advanced Support Vector Machines and Kernel Methods. Neurocomputing 2003, 55, 5–20. [Google Scholar] [CrossRef]
- Speiser, J.L.; Miller, M.E.; Tooze, J.; Ip, E. A Comparison of Random Forest Variable Selection Methods for Classification Prediction Modeling. Expert Syst. Appl. 2019, 134, 93–101. [Google Scholar] [CrossRef] [PubMed]
- Romero-del-Castillo, J.A.; Mendoza-Hurtado, M.; Ortiz-Boyer, D.; García-Pedrajas, N. Local-Based k Values for Multi-Label k-Nearest Neighbors Rule. Eng. Appl. Artif. Intell. 2022, 116, 105487. [Google Scholar] [CrossRef]
- Zhang, H.; Feng, L.; Zhang, X.; Yang, Y.; Li, J. Necessary Conditions for Convergence of CNNs and Initialization of Convolution Kernels. Digit. Signal Process. 2022, 123, 103397. [Google Scholar] [CrossRef]
- De Mulder, W.; Bethard, S.; Moens, M.-F. A Survey on the Application of Recurrent Neural Networks to Statistical Language Modeling. Comput. Speech Lang. 2015, 30, 61–98. [Google Scholar] [CrossRef]
- Wu, Y.; Feng, J. Development and Application of Artificial Neural Network. Wirel. Pers. Commun. 2018, 102, 1645–1656. [Google Scholar] [CrossRef]
- Zhang, H.; Cheng, Q.; Lu, X.; Wang, W.; Wang, Z.L.; Sun, C. Detection of Driving Actions on Steering Wheel Using Triboelectric Nanogenerator via Machine Learning. Nano Energy 2021, 79, 105455. [Google Scholar] [CrossRef]
- Zhang, Q.; Jin, T.; Cai, J.; Xu, L.; He, T.; Wang, T.; Tian, Y.; Li, L.; Peng, Y.; Lee, C. Wearable Triboelectric Sensors Enabled Gait Analysis and Waist Motion Capture for IoT-Based Smart Healthcare Applications. Adv. Sci. 2022, 9, 2103694. [Google Scholar] [CrossRef] [PubMed]
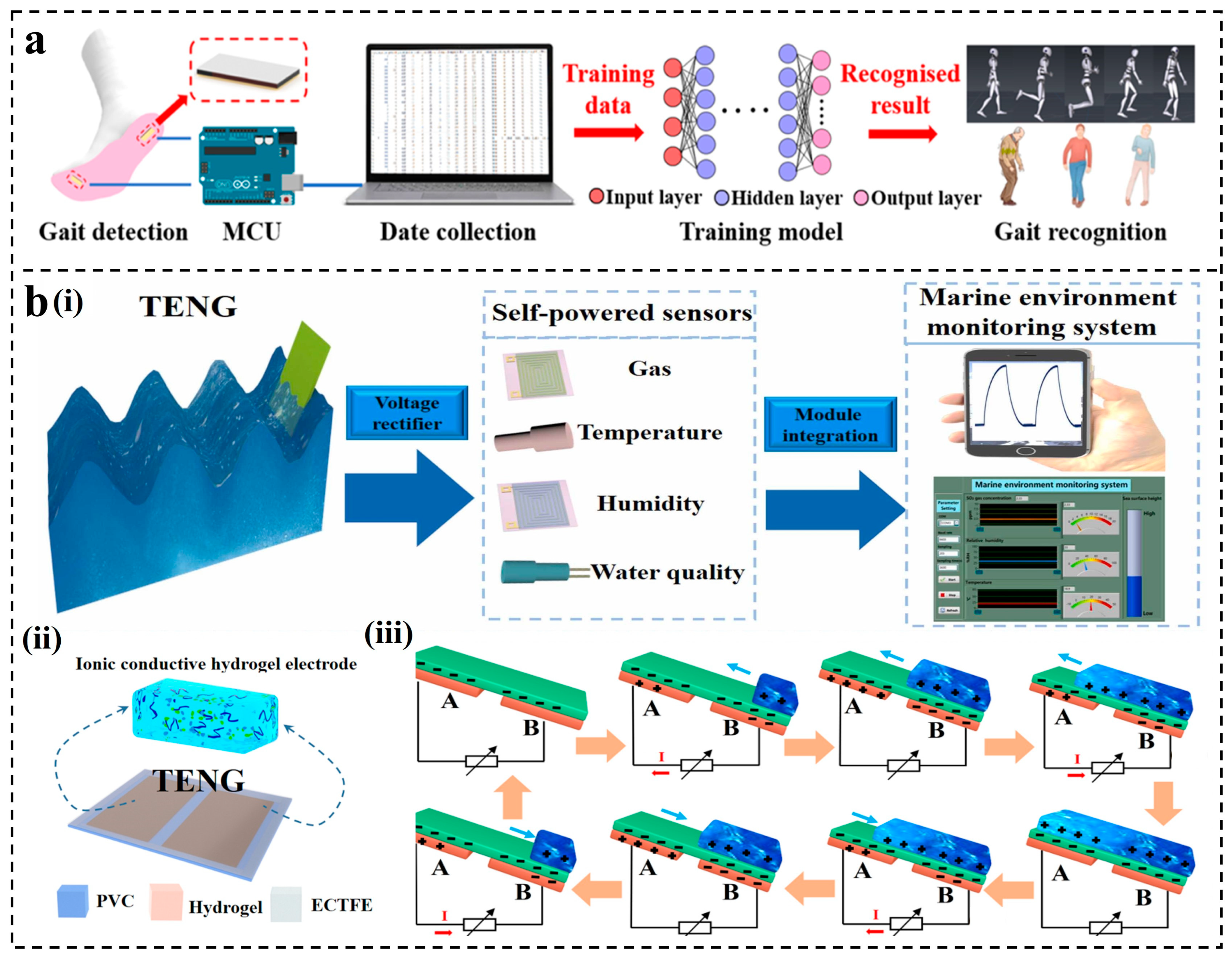
- Wang, D.; Zhang, D.; Tang, M.; Zhang, H.; Sun, T.; Yang, C.; Mao, R.; Li, K.; Wang, J. Ethylene Chlorotrifluoroethylene/Hydrogel-Based Liquid-Solid Triboelectric Nanogenerator Driven Self-Powered MXene-Based Sensor System for Marine Environmental Monitoring. Nano Energy 2022, 100, 107509. [Google Scholar] [CrossRef]
- Li, N.; Yin, Z.; Zhang, W.; Xing, C.; Peng, T.; Meng, B.; Yang, J.; Peng, Z. A Triboelectric-Inductive Hybrid Tactile Sensor for Highly Accurate Object Recognition. Nano Energy 2022, 96, 107063. [Google Scholar] [CrossRef]
- Huang, J.; Zhang, W.; Chen, X.; Wang, S.; Chen, Z.; Li, P.; Li, H.; Gui, C. Fabrication of Triboelectric Nanogenerators with Multiple Strain Mechanisms for High-Accuracy Material and Gesture Recognition. J. Mater. Chem. A 2023, 11, 18441–18453. [Google Scholar] [CrossRef]
- Wei, X.; Wang, B.; Cao, X.; Zhou, H.; Wu, Z.; Wang, Z.L. Dual-Sensory Fusion Self-Powered Triboelectric Taste-Sensing System towards Effective and Low-Cost Liquid Identification. Nat. Food 2023, 4, 721–732. [Google Scholar] [CrossRef] [PubMed]
- Zhu, M.; Sun, Z.; Zhang, Z.; Shi, Q.; He, T.; Liu, H.; Chen, T.; Lee, C. Haptic-Feedback Smart Glove as a Creative Human-Machine Interface (HMI) for Virtual/Augmented Reality Applications. Sci. Adv. 2020, 6, eaaz8693. [Google Scholar] [CrossRef]
- Sun, H.; Gao, X.; Guo, L.; Tao, L.; Guo, Z.H.; Shao, Y.; Cui, T.; Yang, Y.; Pu, X.; Ren, T. Graphene-based Dual-function Acoustic Transducers for Machine Learning-assisted Human–Robot Interfaces. InfoMat 2023, 5, e12385. [Google Scholar] [CrossRef]
- Sun, Z.; Zhu, M.; Zhang, Z.; Chen, Z.; Shi, Q.; Shan, X.; Yeow, R.C.H.; Lee, C. Artificial Intelligence of Things (AIoT) Enabled Virtual Shop Applications Using Self-Powered Sensor Enhanced Soft Robotic Manipulator. Adv. Sci. 2021, 8, 2100230. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhao, T.; Sun, F.; Jia, C.; Ye, H.; Jiang, Y.; Wang, K.; Huang, C.; Xie, Y.; Mao, Y. Multi-Functional Triboelectric Nanogenerators on Printed Circuit Board for Metaverse Sport Interactive System. Nano Energy 2023, 113, 108520. [Google Scholar] [CrossRef]
- Kong, L.; Fang, Z.; Zhang, T.; Zhang, Z.; Pan, Y.; Hao, D.; Chen, J.; Qi, L. A Self-Powered and Self-Sensing Lower-Limb System for Smart Healthcare. Adv. Energy Mater. 2023, 13, 2301254. [Google Scholar] [CrossRef]
- Shrestha, K.; Pradhan, G.B.; Bhatta, T.; Sharma, S.; Lee, S.; Song, H.; Jeong, S.; Park, J.Y. Intermediate Nanofibrous Charge Trapping Layer-Based Wearable Triboelectric Self-Powered Sensor for Human Activity Recognition and User Identification. Nano Energy 2023, 108, 108180. [Google Scholar] [CrossRef]
- Yun, J.; Park, J.; Jeong, S.; Hong, D.; Kim, D. A Mask-Shaped Respiration Sensor Using Triboelectricity and a Machine Learning Approach toward Smart Sleep Monitoring Systems. Polymers 2022, 14, 3549. [Google Scholar] [CrossRef] [PubMed]
- Sahu, M.; Hajra, S.; Panda, S.; Rajaitha, M.; Panigrahi, B.K.; Rubahn, H.-G.; Mishra, Y.K.; Kim, H.J. Waste Textiles as the Versatile Triboelectric Energy-Harvesting Platform for Self-Powered Applications in Sports and Athletics. Nano Energy 2022, 97, 107208. [Google Scholar] [CrossRef]
- Yang, Y.; Hou, X.; Geng, W.; Mu, J.; Zhang, L.; Wang, X.; He, J.; Xiong, J.; Chou, X. Human Movement Monitoring and Behavior Recognition for Intelligent Sports Using Customizable and Flexible Triboelectric Nanogenerator. Sci. China Technol. Sci. 2022, 65, 826–836. [Google Scholar] [CrossRef]
- Zhao, D.; Zhang, K.; Meng, Y.; Li, Z.; Pi, Y.; Shi, Y.; You, J.; Wang, R.; Dai, Z.; Zhou, B.; et al. Untethered Triboelectric Patch for Wearable Smart Sensing and Energy Harvesting. Nano Energy 2022, 100, 107500. [Google Scholar] [CrossRef]
- Zhou, H.; Li, D.; He, X.; Hui, X.; Guo, H.; Hu, C.; Mu, X.; Wang, Z.L. Bionic Ultra-Sensitive Self-Powered Electromechanical Sensor for Muscle-Triggered Communication Application. Adv. Sci. 2021, 8, 2101020. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, P.; Sun, K.; Wang, C.; Diao, D. Intelligently Detecting and Identifying Liquids Leakage Combining Triboelectric Nanogenerator Based Self-Powered Sensor with Machine Learning. Nano Energy 2019, 56, 277–285. [Google Scholar] [CrossRef]
- Liu, Y.; Li, E.; Wang, X.; Chen, Q.; Zhou, Y.; Hu, Y.; Chen, G.; Chen, H.; Guo, T. Self-Powered Artificial Auditory Pathway for Intelligent Neuromorphic Computing and Sound Detection. Nano Energy 2020, 78, 105403. [Google Scholar] [CrossRef]
- Qiu, X.; Liu, J.; Zhou, B.; Zhang, X. Bioinspired Bimodal Mechanosensors with Real-Time, Visualized Information Display for Intelligent Control. Adv. Funct. Mater. 2023, 33, 2300321. [Google Scholar] [CrossRef]
- Yu, J.; Yang, X.; Gao, G.; Xiong, Y.; Wang, Y.; Han, J.; Chen, Y.; Zhang, H.; Sun, Q.; Wang, Z.L. Bioinspired Mechano-Photonic Artificial Synapse Based on Graphene/MoS 2 Heterostructure. Sci. Adv. 2021, 7, eabd9117. [Google Scholar] [CrossRef] [PubMed]
- Yun, J.; Jayababu, N.; Kim, D. Self-Powered Transparent and Flexible Touchpad Based on Triboelectricity towards Artificial Intelligence. Nano Energy 2020, 78, 105325. [Google Scholar] [CrossRef]
- Song, Z.; Yin, J.; Wang, Z.; Lu, C.; Yang, Z.; Zhao, Z.; Lin, Z.; Wang, J.; Wu, C.; Cheng, J.; et al. A Flexible Triboelectric Tactile Sensor for Simultaneous Material and Texture Recognition. Nano Energy 2022, 93, 106798. [Google Scholar] [CrossRef]
- Lu, Y.; Tian, H.; Cheng, J.; Zhu, F.; Liu, B.; Wei, S.; Ji, L.; Wang, Z.L. Decoding Lip Language Using Triboelectric Sensors with Deep Learning. Nat. Commun. 2022, 13, 1401. [Google Scholar] [CrossRef] [PubMed]
- Ran, X.; Luo, F.; Lin, Z.; Zhu, Z.; Liu, C.; Chen, B. Blood Pressure Monitoring via Double Sandwich-Structured Triboelectric Sensors and Deep Learning Models. Nano Res. 2022, 15, 5500–5509. [Google Scholar] [CrossRef]
- Wang, Z.L. On Maxwell’s Displacement Current for Energy and Sensors: The Origin of Nanogenerators. Mater. Today 2017, 20, 74–82. [Google Scholar] [CrossRef]
- Wu, W.; Cao, X.; Zou, J.; Ma, Y.; Wu, X.; Sun, C.; Li, M.; Wang, N.; Wang, Z.; Zhang, L. Triboelectric Nanogenerator Boosts Smart Green Tires. Adv. Funct. Mater. 2019, 29, 1806331. [Google Scholar] [CrossRef]
- Wang, A.C.; Zhang, B.; Xu, C.; Zou, H.; Lin, Z.; Wang, Z.L. Unraveling Temperature-Dependent Contact Electrification between Sliding-Mode Triboelectric Pairs. Adv. Funct. Mater. 2020, 30, 1909384. [Google Scholar] [CrossRef]
- Mule, A.R.; Dudem, B.; Patnam, H.; Graham, S.A.; Yu, J.S. Wearable Single-Electrode-Mode Triboelectric Nanogenerator via Conductive Polymer-Coated Textiles for Self-Power Electronics. ACS Sustain. Chem. Eng. 2019, 7, 16450–16458. [Google Scholar] [CrossRef]
- Paosangthong, W.; Wagih, M.; Torah, R.; Beeby, S. Textile-Based Triboelectric Nanogenerator with Alternating Positive and Negative Freestanding Grating Structure. Nano Energy 2019, 66, 104148. [Google Scholar] [CrossRef]
- Shi, Q.; Zhang, Z.; He, T.; Sun, Z.; Wang, B.; Feng, Y.; Shan, X.; Salam, B.; Lee, C. Deep Learning Enabled Smart Mats as a Scalable Floor Monitoring System. Nat. Commun. 2020, 11, 4609. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Xia, X.; Fu, J.; Song, Z.; Ding, W.; Dai, Y.; Zi, Y. A Flexible Lightweight Self-Powered Wireless Metal Detector Enabled by Triboelectric Discharge Effect. Device 2023, 1, 100127. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, Z.; Wang, J.; Liu, X.; Shi, Q.; Wang, Y.; Qiao, L.; Li, Y.; Yang, H.; Liu, J.; et al. Deep Learning-Assisted Triboelectric Smart Mats for Personnel Comprehensive Monitoring toward Maritime Safety. ACS Appl. Mater. Interfaces 2022, 14, 24832–24839. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Yin, J.; Fang, Y.; Xiao, X.; Zou, Y.; Wang, S.; Chen, J. Deep Learning Assisted Ternary Electrification Layered Triboelectric Membrane Sensor for Self-Powered Home Security. Nano Energy 2023, 113, 108524. [Google Scholar] [CrossRef]
- Chen, L.; Wen, C.; Zhang, S.-L.; Wang, Z.L.; Zhang, Z.-B. Artificial Tactile Peripheral Nervous System Supported by Self-Powered Transducers. Nano Energy 2021, 82, 105680. [Google Scholar] [CrossRef]
- Ye, C.; Yang, S.; Ren, J.; Dong, S.; Cao, L.; Pei, Y.; Ling, S. Electroassisted Core-Spun Triboelectric Nanogenerator Fabrics for IntelliSense and Artificial Intelligence Perception. ACS Nano 2022, 16, 4415–4425. [Google Scholar] [CrossRef]
- Zhu, M.; Sun, Z.; Lee, C. Soft Modular Glove with Multimodal Sensing and Augmented Haptic Feedback Enabled by Materials’ Multifunctionalities. ACS Nano 2022, 16, 14097–14110. [Google Scholar] [CrossRef]
- An, S.; Pu, X.; Zhou, S.; Wu, Y.; Li, G.; Xing, P.; Zhang, Y.; Hu, C. Deep Learning Enabled Neck Motion Detection Using a Triboelectric Nanogenerator. ACS Nano 2022, 16, 9359–9367. [Google Scholar] [CrossRef]
- Kim, J.-N.; Lee, J.; Lee, H.; Oh, I.-K. Stretchable and Self-Healable Catechol-Chitosan-Diatom Hydrogel for Triboelectric Generator and Self-Powered Tremor Sensor Targeting at Parkinson Disease. Nano Energy 2021, 82, 105705. [Google Scholar] [CrossRef]
- Xiong, Y.; Luo, L.; Yang, J.; Han, J.; Liu, Y.; Jiao, H.; Wu, S.; Cheng, L.; Feng, Z.; Sun, J.; et al. Scalable Spinning, Winding, and Knitting Graphene Textile TENG for Energy Harvesting and Human Motion Recognition. Nano Energy 2023, 107, 108137. [Google Scholar] [CrossRef]
- Mu, S.; Li, S.; Zhao, H.; Wang, Z.; Xiao, X.; Xiao, X.; Lin, Z.; Song, Z.; Tang, H.; Xu, Q.; et al. A Platypus-Inspired Electro-Mechanosensory Finger for Remote Control and Tactile Sensing. Nano Energy 2023, 116, 108790. [Google Scholar] [CrossRef]
- Zhang, Z.; Shi, Q.; He, T.; Guo, X.; Dong, B.; Lee, J.; Lee, C. Artificial Intelligence of Toilet (AI-Toilet) for an Integrated Health Monitoring System (IHMS) Using Smart Triboelectric Pressure Sensors and Image Sensor. Nano Energy 2021, 90, 106517. [Google Scholar] [CrossRef]
- Zhao, L.; Liu, L.; Yang, X.; Hong, H.; Yang, Q.; Wang, J.; Tang, Q. Cumulative Charging Behavior of Water Droplet Driven Freestanding Triboelectric Nanogenerators toward Hydrodynamic Energy Harvesting. J. Mater. Chem. A 2020, 8, 7880–7888. [Google Scholar] [CrossRef]
- Gu, H.; Zhang, N.; Zhou, Z.; Ye, S.; Wang, W.; Xu, W.; Zheng, H.; Song, Y.; Jiao, J.; Wang, Z.; et al. A Bulk Effect Liquid-Solid Generator with 3D Electrodes for Wave Energy Harvesting. Nano Energy 2021, 87, 106218. [Google Scholar] [CrossRef]
- Wang, Z.L.; Wang, A.C. On the Origin of Contact-Electrification. Mater. Today 2019, 30, 34–51. [Google Scholar] [CrossRef]
- Nie, J.; Ren, Z.; Xu, L.; Lin, S.; Zhan, F.; Chen, X.; Wang, Z.L. Probing Contact-Electrification-Induced Electron and Ion Transfers at a Liquid–Solid Interface. Adv. Mater. 2020, 32, 1905696. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.-W.; Hwang, W. Theoretical Study of Micro/Nano Roughness Effect on Water-Solid Triboelectrification with Experimental Approach. Nano Energy 2018, 52, 315–322. [Google Scholar] [CrossRef]
- Pan, L.; Wang, J.; Wang, P.; Gao, R.; Wang, Y.-C.; Zhang, X.; Zou, J.-J.; Wang, Z.L. Liquid-FEP-Based U-Tube Triboelectric Nanogenerator for Harvesting Water-Wave Energy. Nano Res. 2018, 11, 4062–4073. [Google Scholar] [CrossRef]
- Liu, S.; Xu, W.; Yang, J.; Liu, S.; Meng, Y.; Jia, L.; Chen, G.; Qin, Y.; Li, X. DC Output Water Droplet Energy Harvester Enhanced by the Triboelectric Effect. ACS Appl. Electron. Mater. 2022, 4, 2851–2858. [Google Scholar] [CrossRef]
- Jeon, S.; Seol, M.; Kim, D.; Park, S.; Choi, Y. Self-Powered Ion Concentration Sensor with Triboelectricity from Liquid–Solid Contact Electrification. Adv. Elect. Mater. 2016, 2, 1600006. [Google Scholar] [CrossRef]
- Jiang, P.; Zhang, L.; Guo, H.; Chen, C.; Wu, C.; Zhang, S.; Wang, Z.L. Signal Output of Triboelectric Nanogenerator at Oil–Water–Solid Multiphase Interfaces and Its Application for Dual-Signal Chemical Sensing. Adv. Mater. 2019, 31, 1902793. [Google Scholar] [CrossRef] [PubMed]
- Roy Barman, S.; Lin, Y.-J.; Lee, K.-M.; Pal, A.; Tiwari, N.; Lee, S.; Lin, Z.-H. Triboelectric Nanosensor Integrated with Robotic Platform for Self-Powered Detection of Chemical Analytes. ACS Nano 2023, 17, 2689–2701. [Google Scholar] [CrossRef] [PubMed]
- Ying, Z.; Long, Y.; Yang, F.; Dong, Y.; Li, J.; Zhang, Z.; Wang, X. Self-Powered Liquid Chemical Sensors Based on Solid–Liquid Contact Electrification. Analyst 2021, 146, 1656–1662. [Google Scholar] [CrossRef] [PubMed]
- He, S.; Wang, Z.; Zhang, X.; Yuan, Z.; Sun, Y.; Cheng, T.; Wang, Z.L. Self-Powered Sensing for Non-Full Pipe Fluidic Flow Based on Triboelectric Nanogenerators. ACS Appl. Mater. Interfaces 2022, 14, 2825–2832. [Google Scholar] [CrossRef] [PubMed]
- Xiong, J.; Luo, H.; Gao, D.; Zhou, X.; Cui, P.; Thangavel, G.; Parida, K.; Lee, P.S. Self-Restoring, Waterproof, Tunable Microstructural Shape Memory Triboelectric Nanogenerator for Self-Powered Water Temperature Sensor. Nano Energy 2019, 61, 584–593. [Google Scholar] [CrossRef]
- Zeng, Y.; Luo, Y.; Lu, Y.; Cao, X. Self-Powered Rain Droplet Sensor Based on a Liquid-Solid Triboelectric Nanogenerator. Nano Energy 2022, 98, 107316. [Google Scholar] [CrossRef]
- Liu, T.; Mo, W.; Zou, X.; Luo, B.; Zhang, S.; Liu, Y.; Cai, C.; Chi, M.; Wang, J.; Wang, S.; et al. Liquid–Solid Triboelectric Probes for Real-Time Monitoring of Sucrose Fluid Status. Adv. Funct. Mater. 2023, 33, 2304321. [Google Scholar] [CrossRef]
- Wang, Z.; Wan, D.; Fang, R.; Yuan, Z.; Zhuo, K.; Wang, T.; Zhang, H. Water-Based Triboelectric Nanogenerator for Wireless Energy Transmission and Self-Powered Communication via a Solid-Liquid-Solid Interaction. Appl. Surf. Sci. 2022, 605, 154765. [Google Scholar] [CrossRef]
- Zhou, N.; Ao, H.; Chen, X.; Gao, S.; Jiang, H. A Vector Hybrid Triboelectric Sensor (HTS) for Motion Identification via Machine Learning. Nano Res. 2023, 16, 10120–10130. [Google Scholar] [CrossRef]
- Zhou, Z.; Chen, K.; Li, X.; Zhang, S.; Wu, Y.; Zhou, Y.; Meng, K.; Sun, C.; He, Q.; Fan, W.; et al. Sign-to-Speech Translation Using Machine-Learning-Assisted Stretchable Sensor Arrays. Nat. Electron. 2020, 3, 571–578. [Google Scholar] [CrossRef]
- Zhu, J.; Sun, Z.; Xu, J.; Walczak, R.D.; Dziuban, J.A.; Lee, C. Volatile Organic Compounds Sensing Based on Bennet Doubler-Inspired Triboelectric Nanogenerator and Machine Learning-Assisted Ion Mobility Analysis. Sci. Bull. 2021, 66, 1176–1185. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.; Fan, E.; Wang, P. Comparative Analysis of Image Classification Algorithms Based on Traditional Machine Learning and Deep Learning. Pattern Recognit. Lett. 2021, 141, 61–67. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Mathur, A.; Foody, G.M. Multiclass and Binary SVM Classification: Implications for Training and Classification Users. IEEE Geosci. Remote Sens. Lett. 2008, 5, 241–245. [Google Scholar] [CrossRef]
- Goh, Q.-L.; Chee, P.-S.; Lim, E.-H.; Ng, D.W.-K. An AI-Assisted and Self-Powered Smart Robotic Gripper Based on Eco-EGaIn Nanocomposite for Pick-and-Place Operation. Nanomaterials 2022, 12, 1317. [Google Scholar] [CrossRef] [PubMed]
- Ye, G.; Wan, Y.; Wu, J.; Zhuang, W.; Zhou, Z.; Jin, T.; Zi, J.; Zhang, D.; Geng, X.; Yang, P. Multifunctional Device Integrating Dual-Temperature Regulator for Outdoor Personal Thermal Comfort and Triboelectric Nanogenerator for Self-Powered Human-Machine Interaction. Nano Energy 2022, 97, 107148. [Google Scholar] [CrossRef]
- Zhang, W.; Deng, L.; Yang, L.; Yang, P.; Diao, D.; Wang, P.; Wang, Z.L. Multilanguage-Handwriting Self-Powered Recognition Based on Triboelectric Nanogenerator Enabled Machine Learning. Nano Energy 2020, 77, 105174. [Google Scholar] [CrossRef]
- Ji, X.; Zhao, T.; Zhao, X.; Lu, X.; Li, T. Triboelectric Nanogenerator Based Smart Electronics via Machine Learning. Adv. Mater. Technol. 2020, 5, 1900921. [Google Scholar] [CrossRef]
- Wu, C.; Ding, W.; Liu, R.; Wang, J.; Wang, A.C.; Wang, J.; Li, S.; Zi, Y.; Wang, Z.L. Keystroke Dynamics Enabled Authentication and Identification Using Triboelectric Nanogenerator Array. Mater. Today 2018, 21, 216–222. [Google Scholar] [CrossRef]
- Li, W.; Liu, Y.; Wang, S.; Li, W.; Liu, G.; Zhao, J.; Zhang, X.; Zhang, C. Vibrational Triboelectric Nanogenerator-Based Multinode Self-Powered Sensor Network for Machine Fault Detection. IEEE/ASME Trans. Mechatron. 2020, 25, 2188–2196. [Google Scholar] [CrossRef]
- Luo, Y.; Wang, Z.; Wang, J.; Xiao, X.; Li, Q.; Ding, W.; Fu, H.Y. Triboelectric Bending Sensor Based Smart Glove towards Intuitive Multi-Dimensional Human-Machine Interfaces. Nano Energy 2021, 89, 106330. [Google Scholar] [CrossRef]
- Luo, Y.; Xiao, X.; Chen, J.; Li, Q.; Fu, H. Machine-Learning-Assisted Recognition on Bioinspired Soft Sensor Arrays. ACS Nano 2022, 16, 6734–6743. [Google Scholar] [CrossRef] [PubMed]
- Ding, W.; Wu, C.; Zi, Y.; Zou, H.; Wang, J.; Cheng, J.; Wang, A.C.; Wang, Z.L. Self-Powered Wireless Optical Transmission of Mechanical Agitation Signals. Nano Energy 2018, 47, 566–572. [Google Scholar] [CrossRef]
- Lee, L.C.; Jemain, A.A. On Overview of PCA Application Strategy in Processing High Dimensionality Forensic Data. Microchem. J. 2021, 169, 106608. [Google Scholar] [CrossRef]
- Chang, C.-C.; Lin, C.-J. LIBSVM: A Library for Support Vector Machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 27. [Google Scholar] [CrossRef]
- Fopa, M.; Gueye, M.; Ndiaye, S.; Naacke, H. A Parameter-Free KNN for Rating Prediction. Data Knowl. Eng. 2022, 142, 102095. [Google Scholar] [CrossRef]
- Zhao, D.; Hu, X.; Xiong, S.; Tian, J.; Xiang, J.; Zhou, J.; Li, H. K-Means Clustering and kNN Classification Based on Negative Databases. Appl. Soft Comput. 2021, 110, 107732. [Google Scholar] [CrossRef]
- Guo, H.; Wan, J.; Wang, H.; Wu, H.; Xu, C.; Miao, L.; Han, M.; Zhang, H. Self-Powered Intelligent Human-Machine Interaction for Handwriting Recognition. Research 2021, 2021, 4689869. [Google Scholar] [CrossRef]
- Liu, Y.; Shen, Y.; Ding, W.; Zhang, X.; Tian, W.; Yang, S.; Hui, B.; Zhang, K. All-Natural Phyllosilicate-Polysaccharide Triboelectric Sensor for Machine Learning-Assisted Human Motion Prediction. npj Flex. Electron. 2023, 7, 21. [Google Scholar] [CrossRef]
- Dong, S.; Wang, P.; Abbas, K. A Survey on Deep Learning and Its Applications. Comput. Sci. Rev. 2021, 40, 100379. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep Learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Divya, S.; Panda, S.; Hajra, S.; Jeyaraj, R.; Paul, A.; Park, S.H.; Kim, H.J.; Oh, T.H. Smart Data Processing for Energy Harvesting Systems Using Artificial Intelligence. Nano Energy 2023, 106, 108084. [Google Scholar] [CrossRef]
- Rosenblatt, F. The Perceptron: A Probabilistic Model for Information Storage and Organization in the Brain. Psychol. Rev. 1958, 65, 386–408. [Google Scholar] [CrossRef] [PubMed]
- Agatonovic-Kustrin, S.; Beresford, R. Basic Concepts of Artificial Neural Network (ANN) Modeling and Its Application in Pharmaceutical Research. J. Pharm. Biomed. Anal. 2000, 22, 717–727. [Google Scholar] [CrossRef]
- Pang, Y.; Xu, X.; Chen, S.; Fang, Y.; Shi, X.; Deng, Y.; Wang, Z.-L.; Cao, C. Skin-Inspired Textile-Based Tactile Sensors Enable Multifunctional Sensing of Wearables and Soft Robots. Nano Energy 2022, 96, 107137. [Google Scholar] [CrossRef]
- Guo, J.; Yuan, X.; Ruan, H.; Duan, Y.; Liu, Y.; Kong, C.; Liu, Y.; Su, M.; Xie, T.; Wang, H.; et al. A Flexible PI/Graphene Heterojunction Optoelectronic Device Modulated by TENG and UV Light for Neuromorphic Vision System. Nano Energy 2023, 117, 108928. [Google Scholar] [CrossRef]
- Zhao, Y.; Liang, Q.; Mugo, S.M.; An, L.; Zhang, Q.; Lu, Y. Self-Healing and Shape-Editable Wearable Supercapacitors Based on Highly Stretchable Hydrogel Electrolytes. Adv. Sci. 2022, 9, 2201039. [Google Scholar] [CrossRef]
- Wang, Z.; Bu, M.; Xiu, K.; Sun, J.; Hu, N.; Zhao, L.; Gao, L.; Kong, F.; Zhu, H.; Song, J.; et al. A Flexible, Stretchable and Triboelectric Smart Sensor Based on Graphene Oxide and Polyacrylamide Hydrogel for High Precision Gait Recognition in Parkinsonian and Hemiplegic Patients. Nano Energy 2022, 104, 107978. [Google Scholar] [CrossRef]
- Gu, J.; Wang, Z.; Kuen, J.; Ma, L.; Shahroudy, A.; Shuai, B.; Liu, T.; Wang, X.; Wang, G.; Cai, J.; et al. Recent Advances in Convolutional Neural Networks. Pattern Recognit. 2018, 77, 354–377. [Google Scholar] [CrossRef]
- Li, Z.; Liu, F.; Yang, W.; Peng, S.; Zhou, J. A Survey of Convolutional Neural Networks: Analysis, Applications, and Prospects. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 6999–7019. [Google Scholar] [CrossRef] [PubMed]
- Li, K.; Zhang, D.; Zhang, H.; Wang, D.; Xu, Z.; Cai, H.; Xia, H. Triboelectric Nanogenerators Based on Super-Stretchable Conductive Hydrogels with the Assistance of Deep-Learning for Handwriting Recognition. ACS Appl. Mater. Interfaces 2023, 15, 32993–33002. [Google Scholar] [CrossRef] [PubMed]
- Tao, K.; Yu, J.; Zhang, J.; Bao, A.; Hu, H.; Ye, T.; Ding, Q.; Wang, Y.; Lin, H.; Wu, J.; et al. Deep-Learning Enabled Active Biomimetic Multifunctional Hydrogel Electronic Skin. ACS Nano 2023, 17, 16160–16173. [Google Scholar] [CrossRef] [PubMed]
- Shi, Q.; Zhang, Z.; Yang, Y.; Shan, X.; Salam, B.; Lee, C. Artificial Intelligence of Things (AIoT) Enabled Floor Monitoring System for Smart Home Applications. ACS Nano 2021, 15, 18312–18326. [Google Scholar] [CrossRef] [PubMed]
- Xiang, S.; Tang, J.; Yang, L.; Guo, Y.; Zhao, Z.; Zhang, W. Deep Learning-Enabled Real-Time Personal Handwriting Electronic Skin with Dynamic Thermoregulating Ability. npj Flex. Electron. 2022, 6, 59. [Google Scholar] [CrossRef]
- Yang, Y.; Shi, Q.; Zhang, Z.; Shan, X.; Salam, B.; Lee, C. Robust Triboelectric Information-mat Enhanced by Multi-modality Deep Learning for Smart Home. InfoMat 2023, 5, e12360. [Google Scholar] [CrossRef]
- Wen, F.; Sun, Z.; He, T.; Shi, Q.; Zhu, M.; Zhang, Z.; Li, L.; Zhang, T.; Lee, C. Machine Learning Glove Using Self-Powered Conductive Superhydrophobic Triboelectric Textile for Gesture Recognition in VR/AR Applications. Adv. Sci. 2020, 7, 2000261. [Google Scholar] [CrossRef]
- Wen, F.; Zhang, Z.; He, T.; Lee, C. AI Enabled Sign Language Recognition and VR Space Bidirectional Communication Using Triboelectric Smart Glove. Nat. Commun. 2021, 12, 5378. [Google Scholar] [CrossRef]
- Hou, X.; Zhang, L.; Su, Y.; Gao, G.; Liu, Y.; Na, Z.; Xu, Q.; Ding, T.; Xiao, L.; Li, L.; et al. A Space Crawling Robotic Bio-Paw (SCRBP) Enabled by Triboelectric Sensors for Surface Identification. Nano Energy 2023, 105, 108013. [Google Scholar] [CrossRef]
- Huang, J.; Wang, S.; Zhao, X.; Zhang, W.; Chen, Z.; Liu, R.; Li, P.; Li, H.; Gui, C. Fabrication of a Textile-Based Triboelectric Nanogenerator toward High-Efficiency Energy Harvesting and Material Recognition. Mater. Horiz. 2023, 10, 3840–3853. [Google Scholar] [CrossRef]
- Liu, W.; Duo, Y.; Chen, X.; Chen, B.; Bu, T.; Li, L.; Duan, J.; Zuo, Z.; Wang, Y.; Fang, B.; et al. An Intelligent Robotic System Capable of Sensing and Describing Objects Based on Bimodal, Self-Powered Flexible Sensors. Adv. Funct. Mater. 2023, 33, 2306368. [Google Scholar] [CrossRef]
- Yang, J.; Liu, S.; Meng, Y.; Xu, W.; Liu, S.; Jia, L.; Chen, G.; Qin, Y.; Han, M.; Li, X. Self-Powered Tactile Sensor for Gesture Recognition Using Deep Learning Algorithms. ACS Appl. Mater. Interfaces 2022, 14, 25629–25637. [Google Scholar] [CrossRef] [PubMed]
- Shi, Y.; Yang, P.; Lei, R.; Liu, Z.; Dong, X.; Tao, X.; Chu, X.; Wang, Z.L.; Chen, X. Eye Tracking and Eye Expression Decoding Based on Transparent, Flexible and Ultra-Persistent Electrostatic Interface. Nat. Commun. 2023, 14, 3315. [Google Scholar] [CrossRef] [PubMed]
- Wei, X.; Wang, B.; Wu, Z.; Wang, Z.L. An Open-Environment Tactile Sensing System: Toward Simple and Efficient Material Identification. Adv. Mater. 2022, 34, 2203073. [Google Scholar] [CrossRef] [PubMed]
- Guo, R.; Fang, Y.; Wang, Z.; Libanori, A.; Xiao, X.; Wan, D.; Cui, X.; Sang, S.; Zhang, W.; Zhang, H.; et al. Deep Learning Assisted Body Area Triboelectric Hydrogel Sensor Network for Infant Care. Adv. Funct. Mater. 2022, 32, 2204803. [Google Scholar] [CrossRef]
- Fang, Y.; Xu, J.; Xiao, X.; Zou, Y.; Zhao, X.; Zhou, Y.; Chen, J. A Deep-Learning-Assisted On-Mask Sensor Network for Adaptive Respiratory Monitoring. Adv. Mater. 2022, 34, 2200252. [Google Scholar] [CrossRef] [PubMed]
- Zu, L.; Wen, J.; Wang, S.; Zhang, M.; Sun, W.; Chen, B.; Wang, Z.L. Multiangle, Self-Powered Sensor Array for Monitoring Head Impacts. Sci. Adv. 2023, 9, eadg5152. [Google Scholar] [CrossRef] [PubMed]
- Yuan, Z.; Du, X.; Niu, H.; Li, N.; Shen, G.; Li, C.; Wang, Z.L. Motion Recognition by a Liquid Filled Tubular Triboelectric Nanogenerator. Nanoscale 2019, 11, 495–503. [Google Scholar] [CrossRef]
- Yu, J.; Wen, Y.; Yang, L.; Zhao, Z.; Guo, Y.; Guo, X. Monitoring on Triboelectric Nanogenerator and Deep Learning Method. Nano Energy 2022, 92, 106698. [Google Scholar] [CrossRef]
- Huang, T.; Sun, W.; Liao, L.; Zhang, K.; Lu, M.; Jiang, L.; Chen, S.; Qin, A. Detection of Microplastics Based on a Liquid–Solid Triboelectric Nanogenerator and a Deep Learning Method. ACS Appl. Mater. Interfaces 2023, 15, 35014–35023. [Google Scholar] [CrossRef]
- Yang, L.; Wang, Y.; Zhao, Z.; Guo, Y.; Chen, S.; Zhang, W.; Guo, X. Particle-Laden Droplet-Driven Triboelectric Nanogenerator for Real-Time Sediment Monitoring Using a Deep Learning Method. ACS Appl. Mater. Interfaces 2020, 12, 38192–38201. [Google Scholar] [CrossRef] [PubMed]
- Ge, X.; Gao, Z.; Zhang, L.; Ji, H.; Yi, J.; Jiang, P.; Li, Z.; Shen, L.; Sun, X.; Wen, Z. Flexible Microfluidic Triboelectric Sensor for Gesture Recognition and Information Encoding. Nano Energy 2023, 113, 108541. [Google Scholar] [CrossRef]
- Syu, M.H.; Guan, Y.J.; Lo, W.C.; Fuh, Y.K. Biomimetic and Porous Nanofiber-Based Hybrid Sensor for Multifunctional Pressure Sensing and Human Gesture Identification via Deep Learning Method. Nano Energy 2020, 76, 105029. [Google Scholar] [CrossRef]
- Forgione, M.; Muni, A.; Piga, D.; Gallieri, M. On the Adaptation of Recurrent Neural Networks for System Identification. Automatica 2023, 155, 111092. [Google Scholar] [CrossRef]
- Sherstinsky, A. LSTM Recurrent Networks. Phys. D Nonlinear Phenom. 2020, 404, 132306. [Google Scholar] [CrossRef]
- Li, J.; Xie, Z.; Wang, Z.; Lin, Z.; Lu, C.; Zhao, Z.; Jin, Y.; Yin, J.; Mu, S.; Zhang, C.; et al. A Triboelectric Gait Sensor System for Human Activity Recognition and User Identification. Nano Energy 2023, 112, 108473. [Google Scholar] [CrossRef]
- Mao, J.; Zhou, P.; Wang, X.; Yao, H.; Liang, L.; Zhao, Y.; Zhang, J.; Ban, D.; Zheng, H. A Health Monitoring System Based on Flexible Triboelectric Sensors for Intelligence Medical Internet of Things and Its Applications in Virtual Reality. Nano Energy 2023, 118, 108984. [Google Scholar] [CrossRef]
- Bansal, M.; Goyal, A.; Choudhary, A. A Comparative Analysis of K-Nearest Neighbor, Genetic, Support Vector Machine, Decision Tree, and Long Short Term Memory Algorithms in Machine Learning. Decis. Anal. J. 2022, 3, 100071. [Google Scholar] [CrossRef]
- Zheng, C.; Li, W.; Shi, Y.; Wei, S.; Liu, K.; Cheng, J.; Ji, L.; Lu, Y. Stretchable Self-Adhesive and Self-Powered Smart Bandage for Motion Perception and Motion Intention Recognition. Nano Energy 2023, 109, 108245. [Google Scholar] [CrossRef]
- Zhang, H.; Tan, H.; Wang, W.; Li, Z.; Chen, F.; Jiang, X.; Lu, X.; Hu, Y.; Li, L.; Zhang, J.; et al. Real-Time Non-Driving Behavior Recognition Using Deep Learning-Assisted Triboelectric Sensors in Conditionally Automated Driving. Adv. Funct. Mater. 2023, 33, 2210580. [Google Scholar] [CrossRef]
- Imrana, Y.; Xiang, Y.; Ali, L.; Abdul-Rauf, Z. A Bidirectional LSTM Deep Learning Approach for Intrusion Detection. Expert Syst. Appl. 2021, 185, 115524. [Google Scholar] [CrossRef]
- Beigh, N.T.; Beigh, F.T.; Mallick, D. Machine Learning Assisted Hybrid Transduction Nanocomposite Based Flexible Pressure Sensor Matrix for Human Gait Analysis. Nano Energy 2023, 116, 108824. [Google Scholar] [CrossRef]
- Zheng, Q.; Hou, Y.; Yang, H.; Tan, P.; Shi, H.; Xu, Z.; Ye, Z.; Chen, N.; Qu, X.; Han, X.; et al. Towards a Sustainable Monitoring: A Self-Powered Smart Transportation Infrastructure Skin. Nano Energy 2022, 98, 107245. [Google Scholar] [CrossRef]
- Dong, Y.; Xu, S.; Zhang, C.; Zhang, L.; Wang, D.; Xie, Y.; Luo, N.; Feng, Y.; Wang, N.; Feng, M.; et al. Gas-Liquid Two-Phase Flow-Based Triboelectric Nanogenerator with Ultrahigh Output Power. Sci. Adv. 2022, 8, eadd0464. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.; Jiang, T.; Lin, P.; Shao, J.J.; He, C.; Zhong, W.; Chen, X.Y.; Wang, Z.L. Coupled Triboelectric Nanogenerator Networks for Efficient Water Wave Energy Harvesting. ACS Nano 2018, 12, 1849–1858. [Google Scholar] [CrossRef]
- Qin, Y. A High Output Triboelectric Nanogenerator Integrated with Wave-Structure Electrode for Football Monitoring. Curr. Appl. Phys. 2022, 39, 122–127. [Google Scholar] [CrossRef]
- Huo, Y.; Guo, Y.; Wang, J.; Xue, H.; Feng, Y.; Chen, W.; Li, X. Integrating Multi-Modal Information to Detect Spatial Domains of Spatial Transcriptomics by Graph Attention Network. J. Genet. Genom. 2023, 50, 720–733. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, Q. An Overview of Multi-Task Learning. Natl. Sci. Rev. 2018, 5, 30–43. [Google Scholar] [CrossRef]
- Shteingart, H.; Loewenstein, Y. Reinforcement Learning and Human Behavior. Curr. Opin. Neurobiol. 2014, 25, 93–98. [Google Scholar] [CrossRef]
- Pan, Y. On Visual Knowledge. Front. Inf. Technol. Electron. Eng. 2019, 20, 1021–1025. [Google Scholar] [CrossRef]
- Jiang, M.; Li, B.; Jia, W.; Zhu, Z. Predicting Output Performance of Triboelectric Nanogenerators Using Deep Learning Model. Nano Energy 2022, 93, 106830. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ML Algorithms | Numbers of Training Data | Training Epochs | Accuracy |
|---|---|---|---|
| SVM | 120 | \ | 90% [69] |
| 260 | \ | 93.5% [119] | |
| 300 | \ | 98.9% [123] | |
| 385 | \ | 94.91% [67] | |
| 1500 | \ | 83.6% [121] | |
| KNN | 140 | 8 | 95% [70] |
| 56/315 | \ | 98.2%/100% [66] | |
| ANN | 1000 | 10 | 98.4% [53] |
| 6480 | 20 | 94.44% [136] | |
| CNN | 800 | 50 | 96% [82] |
| 3920 | 50 | 99.07%/99.32% [74] | |
| 6365 | 100 | 96.62% [154] | |
| 47,330 | 3 | 91.3% [57] | |
| 60,000 | 1000 | 96.83% [73] | |
| 311,950/128,000 | 100 | 98.50%/98.3% [172] | |
| RNN | 2000 | 500 | 94.5% [75] |
| 4256 | \ | 97.3% [167] | |
| 5000 | 100 | 81.06% [173] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, R.; Wei, D.; Wang, Z. Synergizing Machine Learning Algorithm with Triboelectric Nanogenerators for Advanced Self-Powered Sensing Systems. Nanomaterials 2024, 14, 165. https://doi.org/10.3390/nano14020165
Li R, Wei D, Wang Z. Synergizing Machine Learning Algorithm with Triboelectric Nanogenerators for Advanced Self-Powered Sensing Systems. Nanomaterials. 2024; 14(2):165. https://doi.org/10.3390/nano14020165
Chicago/Turabian StyleLi, Roujuan, Di Wei, and Zhonglin Wang. 2024. "Synergizing Machine Learning Algorithm with Triboelectric Nanogenerators for Advanced Self-Powered Sensing Systems" Nanomaterials 14, no. 2: 165. https://doi.org/10.3390/nano14020165
APA StyleLi, R., Wei, D., & Wang, Z. (2024). Synergizing Machine Learning Algorithm with Triboelectric Nanogenerators for Advanced Self-Powered Sensing Systems. Nanomaterials, 14(2), 165. https://doi.org/10.3390/nano14020165