
Investigation into a Lightweight Polymeric Porous Sponge with High Magnetic Field and Strain Sensitivity


Abstract
:1. Introduction
2. Materials and Methods
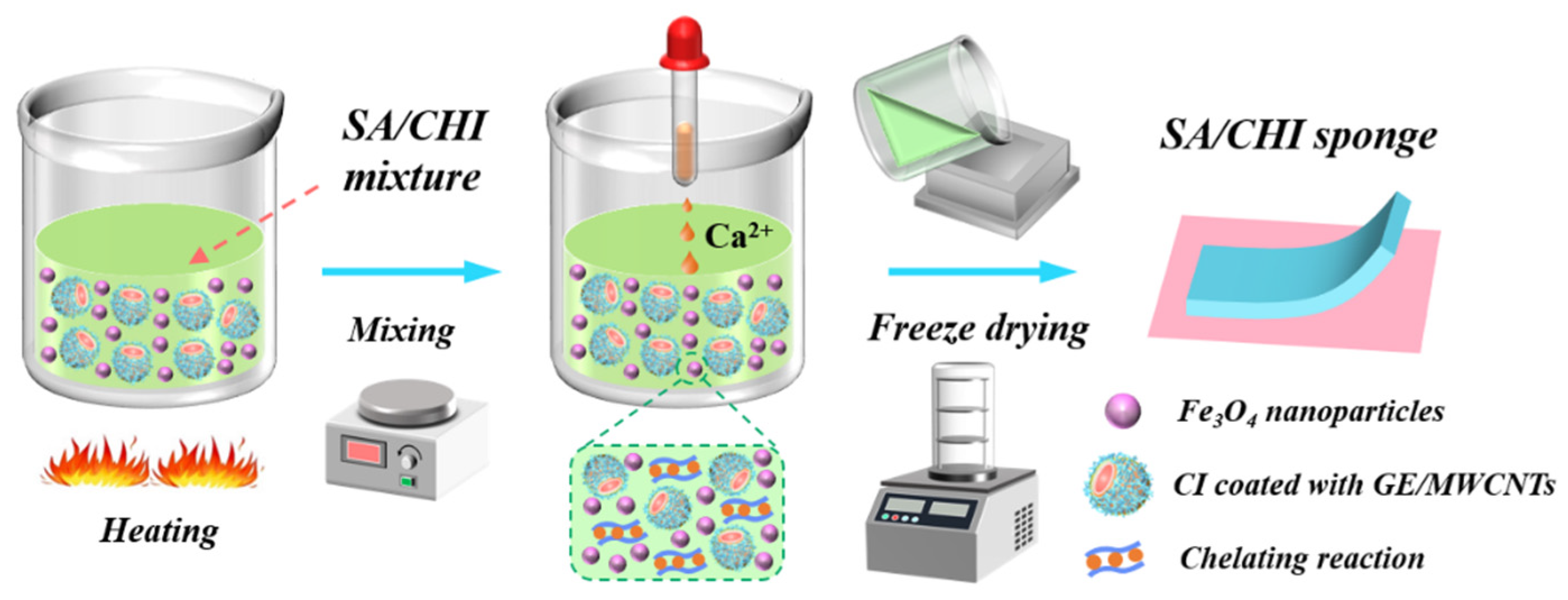
2.1. Fabrication of SA/CHI Porous Sponge
2.2. Characterization
3. Results and Discussion
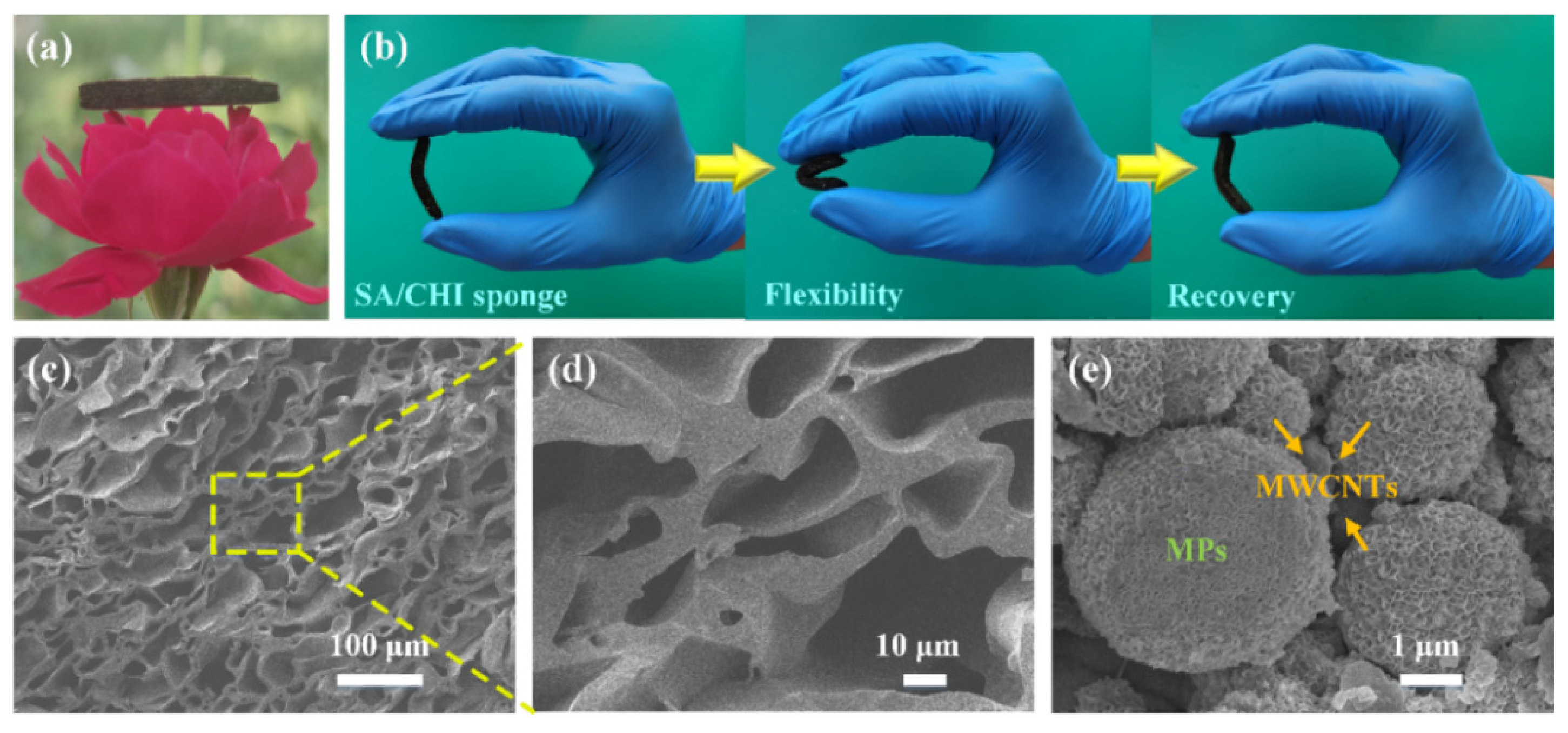
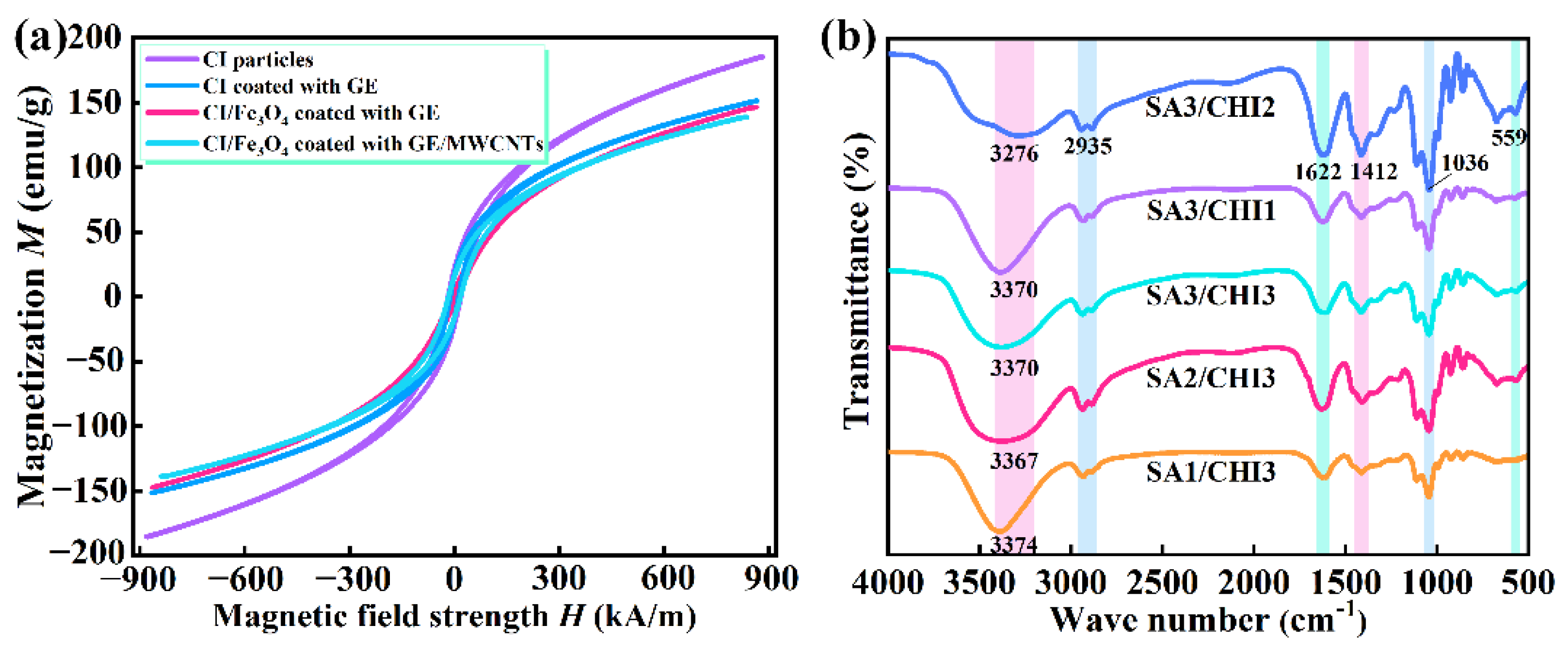
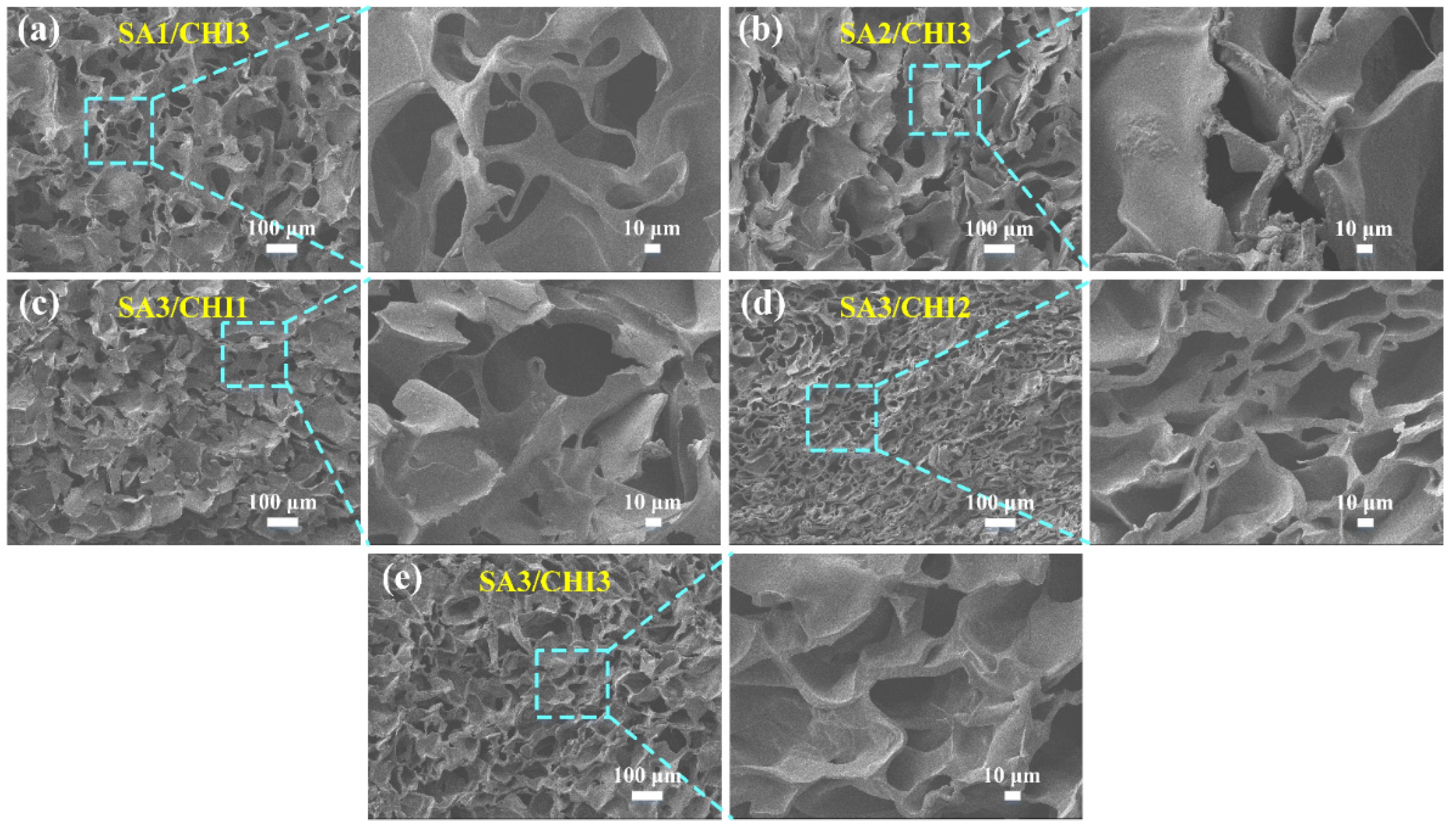
3.1. Structural Characterization of SA/CHI Porous Sponge
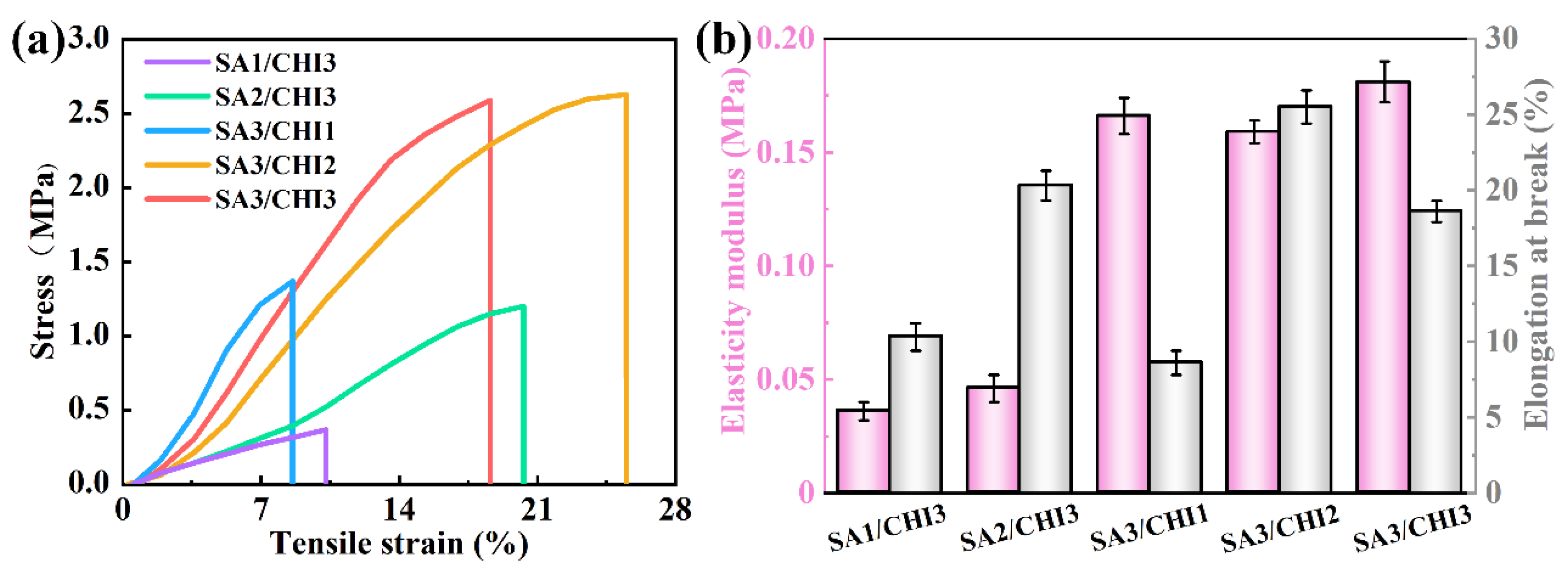
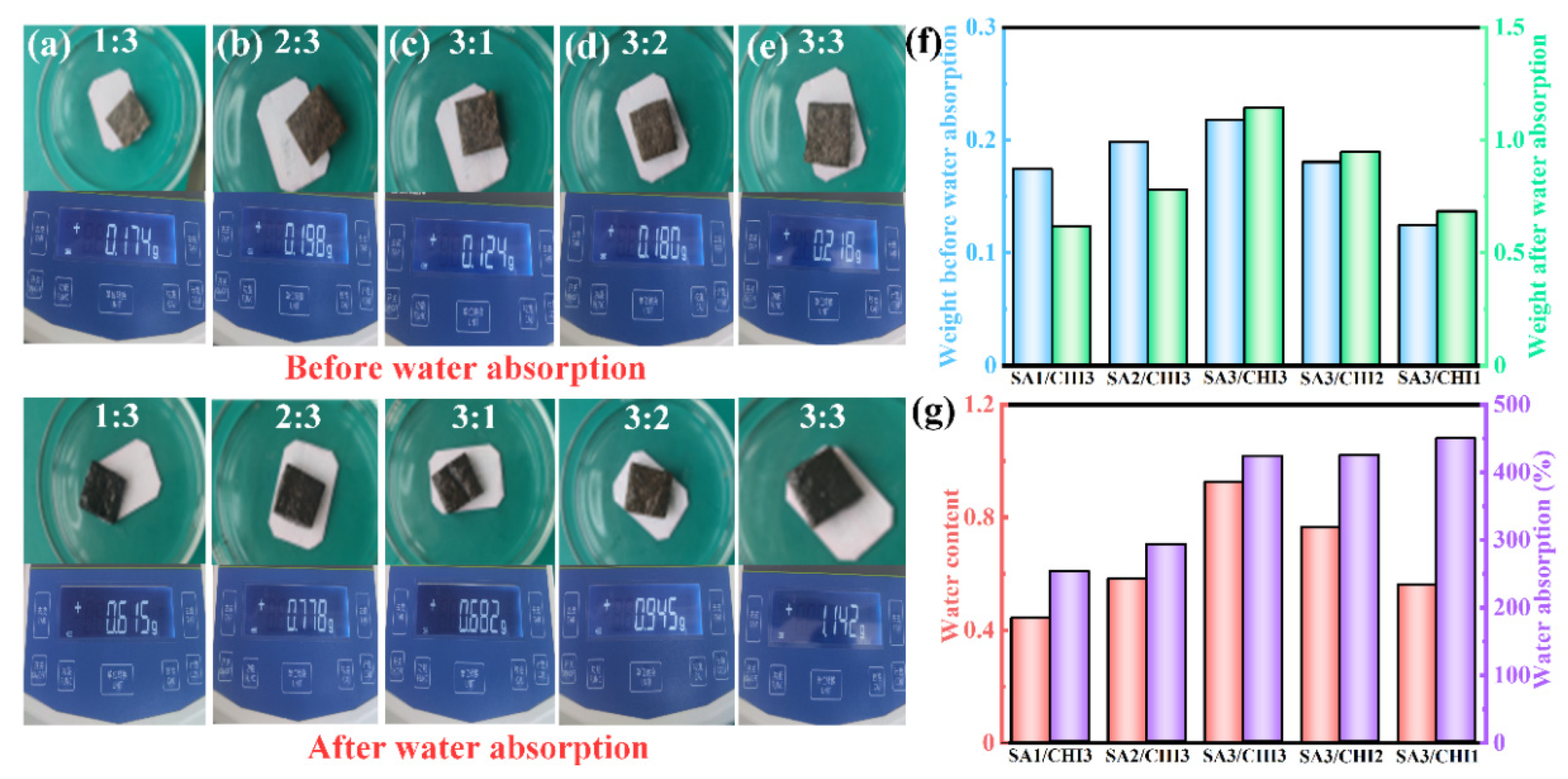
3.2. Mechanical Property and Hydrophilicity of SA/CHI Porous Sponge
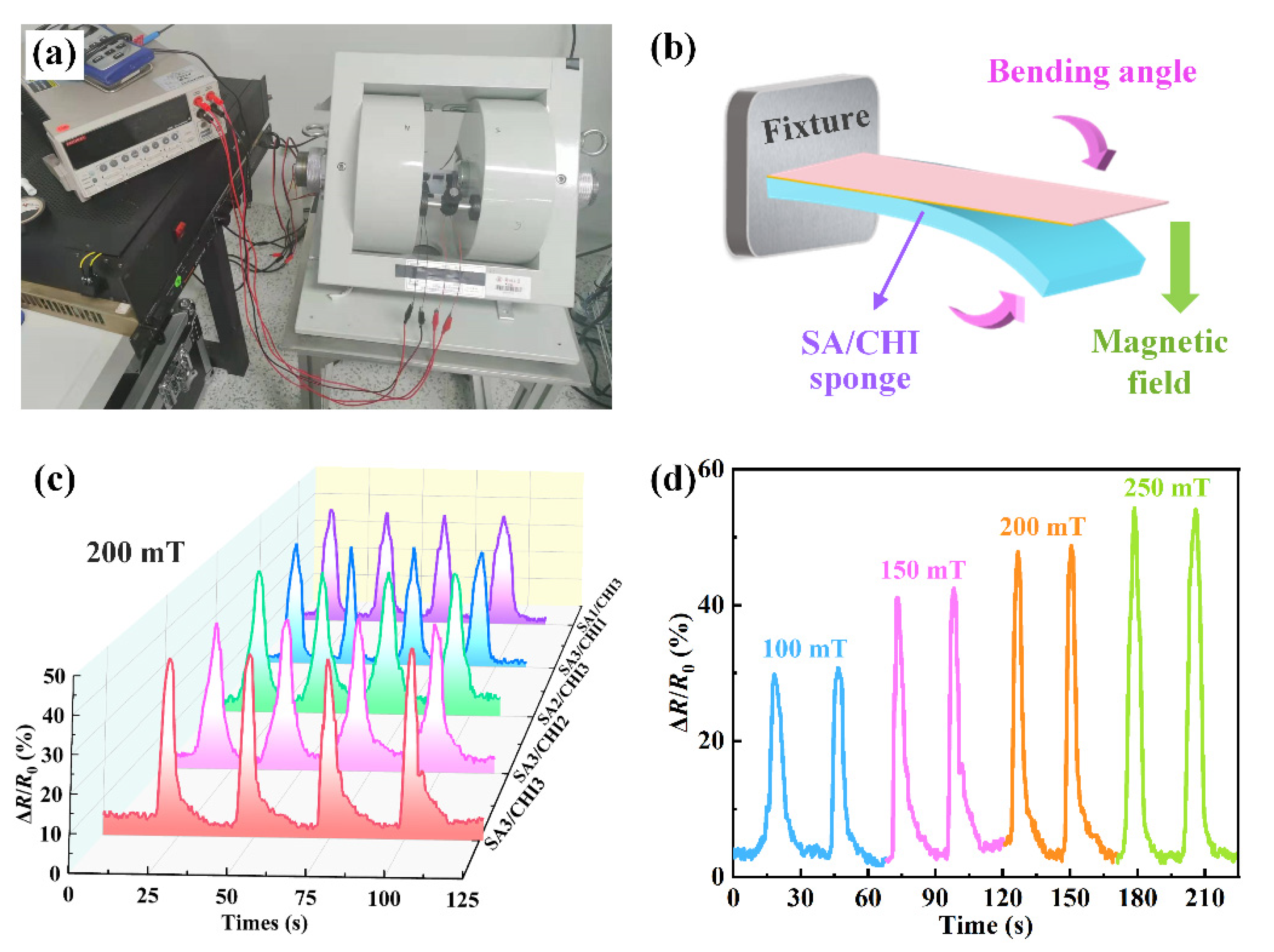
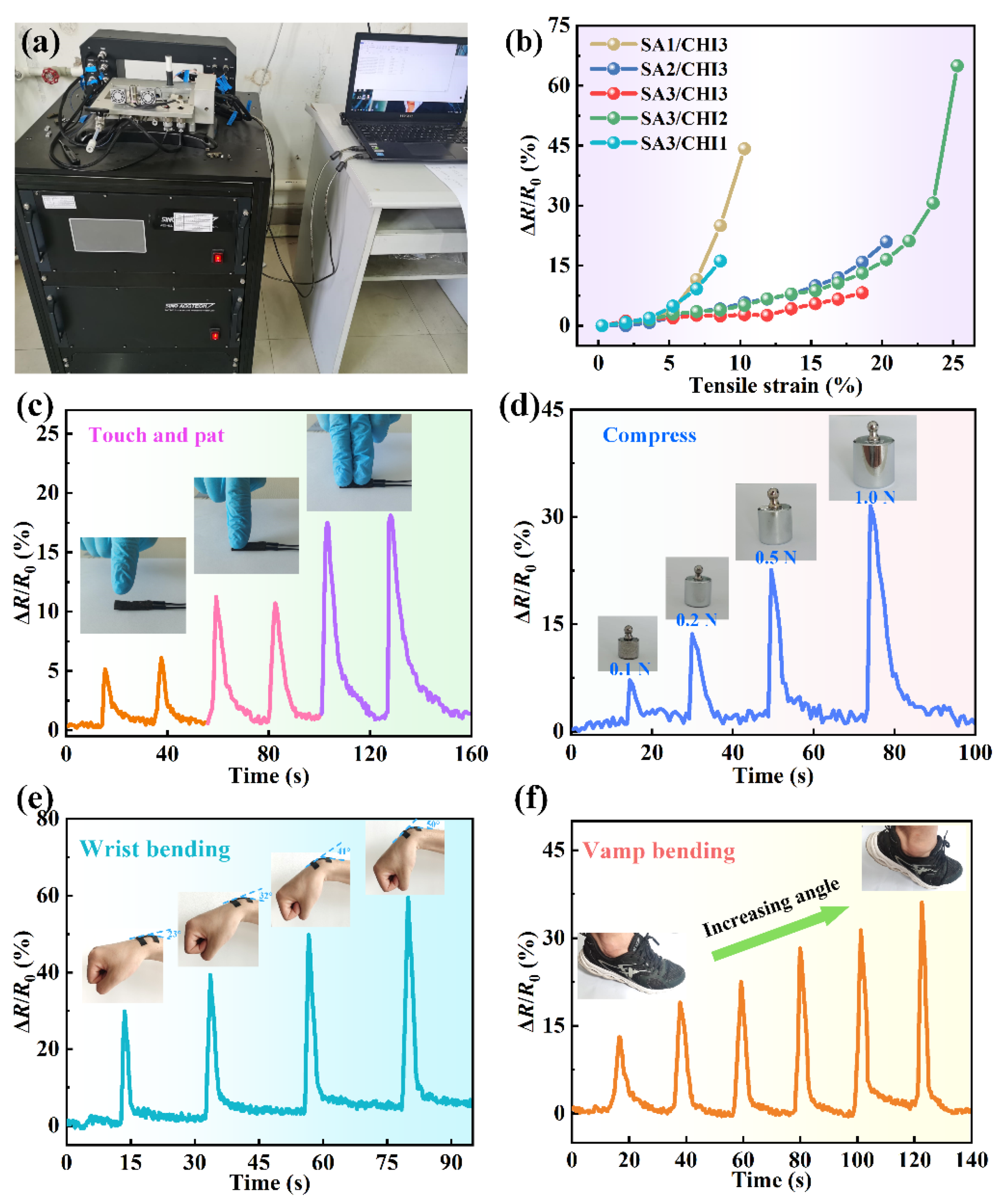
3.3. Magnetic Field and Strain-Dependent Electrical Properties of SA/CHI Porous Sponge
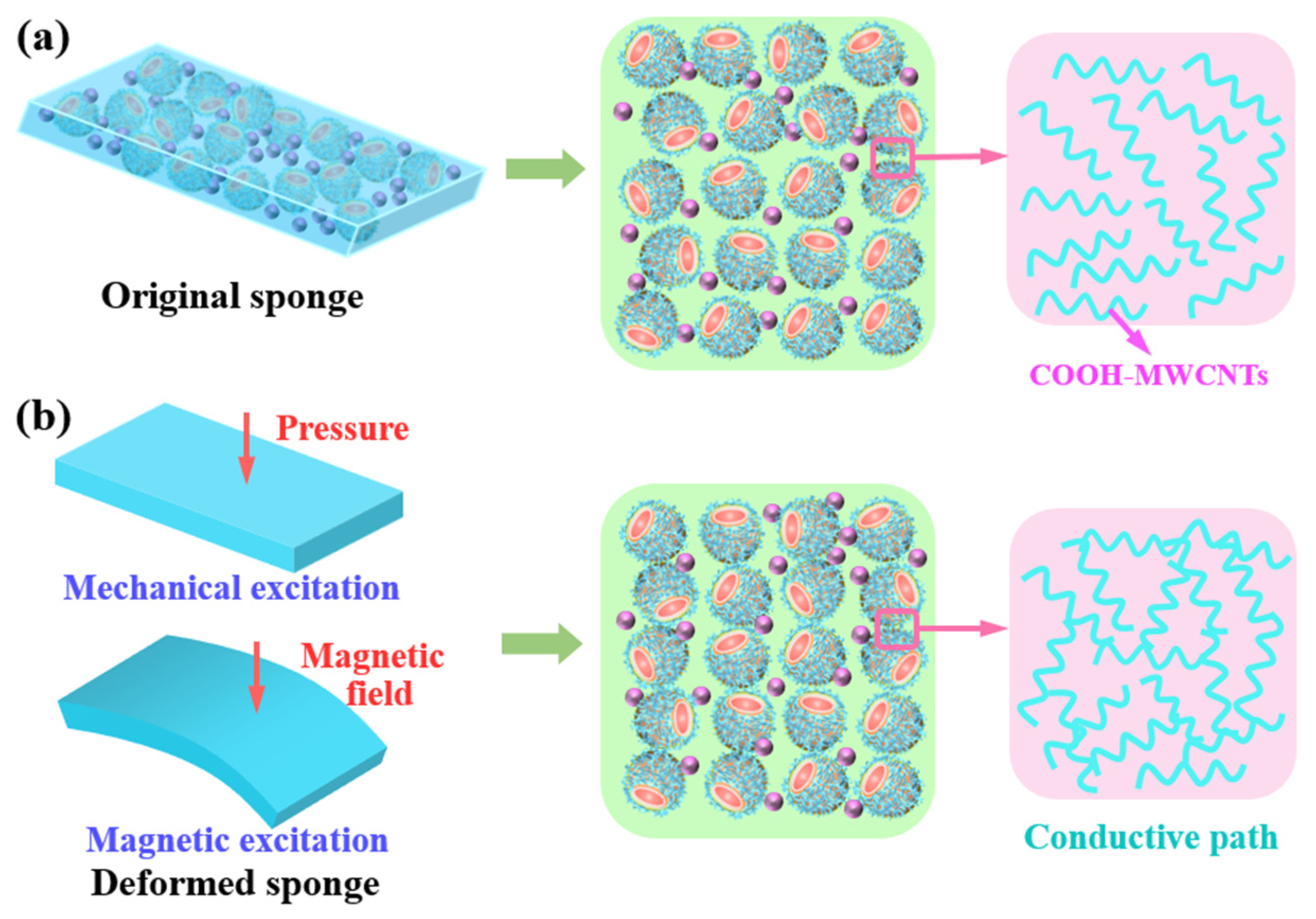
3.4. Stimuli-Sensitive Mechanism of SA/CHI Porous Sponge
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, S.; Wang, S.; Xuan, S.H.; Zhang, S.S.; Fan, X.W.; Jiang, H.; Song, P.G.; Gong, X.L. Highly Flexible Multilayered e-Skins for Thermal-Magnetic-Mechanical Triple Sensors and Intelligent Grippers. ACS Appl. Mater. Interfaces 2020, 12, 15675–15685. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, M.A.; Erdossy, J.; Horvath, V. Temperature-Responsive Magnetic Nanoparticles for Bioanalysis of Lysozyme in Urine Samples. Nanomaterials 2021, 11, 3015. [Google Scholar] [CrossRef] [PubMed]
- Huang, P.; Li, Y.Q.; Yu, X.G.; Zhu, W.B.; Nie, S.Y.; Zhang, H.; Liu, J.R.; Hu, N.; Fu, S.Y. Bioinspired flexible and highly responsive dual-mode strain/magnetism composite sensor. ACS Appl. Mater. Interfaces 2018, 10, 11197–11203. [Google Scholar] [CrossRef] [PubMed]
- Qi, S.; Guo, H.Y.; Fu, J.; Xie, Y.P.; Zhu, M.; Yu, M. 3D printed shape-programmable magneto-active soft matter for biomimetic applications. Compos. Sci. Technol. 2020, 188, 107973. [Google Scholar] [CrossRef]
- Schmauch, M.M.; Mishra, S.R.; Evans, B.A.; Velevt, O.D.; Tracy, J.B. Chained Iron Microparticles for Directionally Controlled Actuation of Soft Robots. ACS Appl. Mater. Interfaces 2017, 9, 11895–11901. [Google Scholar] [CrossRef] [PubMed]
- Li, G.J.; Dai, K.; Ren, M.N.; Wang, Y.; Zheng, G.Q.; Liu, C.T.; Shen, C.Y. Aligned flexible conductive fibrous networks for highly sensitive, ultrastretchable and wearable strain sensors. J. Mater. Chem. C 2018, 6, 6575–6583. [Google Scholar] [CrossRef]
- Son, D.H.; Kang, J.H.; Vardoulis, O. An electrically and mechanically self-healing composite with pressure- and flexion-sensitive properties for electronic skin applications. Nat. Nanotechnol. 2018, 13, 1057–1065. [Google Scholar] [CrossRef]
- Yu, Y.F.; Zhai, Y.; Yun, Z.G.; Zhai, W.; Wang, X.Z.; Zheng, G.Q.; Yan, C.; Dai, K.; Liu, C.T.; Shen, C.Y. Ultra-Stretchable Porous Fiber-Shaped Strain Sensor with Exponential Response in Full Sensing Range and Excellent Anti-Interference Ability toward Buckling, Torsion, Temperature, and Humidity. Adv. Electron. Mater. 2019, 5, 1900538. [Google Scholar] [CrossRef]
- Wang, S.; Yuan, F.; Liu, S.; Zhou, J.Y.; Xuan, S.H.; Wang, Y.; Gong, X.L. A smart triboelectric nanogenerator with tunable rheological and electrical performance for self-powered multi-sensors. J. Mater. Chem. C 2020, 8, 3715–3723. [Google Scholar] [CrossRef]
- Sun, Z.Z.; Yang, L.; Zhang, D.; Song, W.L. High performance, flexible and renewable nano-biocomposite artificial muscle based on mesoporous cellulose/ ionic liquid electrolyte membrane. Sens. Actuators B-Chem. 2019, 283, 579–589. [Google Scholar] [CrossRef]
- Fu, Y.; Zhao, G.; Zhao, H.H.; Wan, Z.S.; Jia, W.K. Investigation into a conductive composite matrix based on magnetically sensitive flexible sponges. Ind. Eng. Chem. Res. 2020, 59, 15967–15978. [Google Scholar] [CrossRef]
- Feng, J.B.; Xuan, S.H.; Ding, L.; Gong, X.L. Magnetoactive elastomer/PVDF composite film based magnetically controllable actuator with real-time deformation feedback property. Compos. Part A Appl. Sci. Manuf. 2017, 103, 25–34. [Google Scholar] [CrossRef]
- Ding, L.; Xuan, S.H.; Pei, L.; Wang, S.; Hu, T.; Zhang, S.S.; Gong, X.L. Stress and magnetic field bimode detection sensors based on flexible Cl/CNTs-PDMS sponges. ACS Appl. Mater. Interfaces 2018, 10, 30774–30784. [Google Scholar] [CrossRef]
- Kang, S.S.; Choi, K.; Nam, J.D.; Choi, H.J. Magnetorheological Elastomers: Fabrication, Characteristics, and Applications. Materials 2020, 13, 4597. [Google Scholar] [CrossRef] [PubMed]
- Fu, Y.; Yao, J.J.; Zhao, H.H.; Zhao, G.; Wan, Z.S.; Qiu, Y. Bidisperse magnetic particles coated with gelatin and graphite oxide: Magnetorheology, dispersion stability, and the nanoparticle-enhancing effect. Nanomaterials 2018, 8, 714. [Google Scholar] [CrossRef] [PubMed]
- Yang, P.A.; Yu, M.; Luo, H.P.; Fu, J.; Qu, H.; Xie, Y.P. Improved rheological properties of dimorphic magnetorheological gels based on flower-like carbonyl iron particles. Appl. Surf. Sci. 2017, 416, 772–780. [Google Scholar] [CrossRef]
- Gao, C.Y.; Baek, E.; You, C.Y.; Choi, H.J. Magnetic-stimuli rheological response of soft-magnetic manganese ferrite nanoparticle suspension. Colloid Polym. Sci. 2021, 299, 865–872. [Google Scholar] [CrossRef]
- Dong, Y.Z.; Esmaeilnezhad, E.; Choi, H.J. Core-Shell Structured Magnetite-Poly(diphenylamine) Microspheres and Their Tunable Dual Response under Magnetic and Electric Fields. Langmuir 2021, 37, 2298–2311. [Google Scholar] [CrossRef]
- Lee, J.; Lim, M.; Yoon, J.; Kim, M.S.; Choi, B.; Kim, D.M.; Kim, D.H.; Park, I.; Choi, S.-J. Transparent, flexible strain sensor based on a solution-processed carbon nanotube network. ACS Appl. Mater. Interfaces 2017, 9, 26279–26285. [Google Scholar] [CrossRef]
- Ubaidillah; Sutrisno, J.; Purwanto, A.; Mazlan, S.A. Recent Progress on Magnetorheological Solids: Materials, Fabrication, Testing, and Applications. Adv. Eng. Mater. 2015, 17, 563–597. [Google Scholar] [CrossRef]
- Jang, D.; Park, J.E.; Kim, Y.K. Evaluation of (CNT@CIP)-Embedded Magneto-Resistive Sensor Based on Carbon Nanotube and Carbonyl Iron Powder Polymer Composites. Polymers 2022, 14, 542. [Google Scholar] [CrossRef]
- Jang, D.; Yoon, H.N.; Nam, I.W.; Lee, H.K. Effect of carbonyl iron powder incorporation on the piezoresistive sensing characteristics of CNT-based polymeric sensor. Compos. Struct. 2020, 244, 112260. [Google Scholar] [CrossRef]
- Fu, Y.; Yao, J.J.; Zhao, H.H.; Zhao, G.; Wan, Z.S.; Qiu, Y. Fabrication and magnetorheology of bidisperse magnetic microspheres coated with gelatin and multi-walled carbon nanotubes. Smart Mater. Struct. 2018, 27, 125001. [Google Scholar] [CrossRef]
- Liu, Q.X.; Liu, Y.; Shi, J.L.; Liu, Z.G.; Wang, Q.; Guo, C.F. High-Porosity Foam-Based Iontronic Pressure Sensor with Superhigh Sensitivity of 9280 kPa(-1). Nano-Micro Lett. 2022, 14, 1–12. [Google Scholar] [CrossRef]
- Li, Y.H.; Zhou, B.; Zheng, G.Q.; Liu, X.H.; Li, T.X.; Yan, C.; Cheng, C.B.; Dai, K.; Liu, C.T.; Shen, C.Y.; et al. Continuously prepared highly conductive and stretchable SWNT/MWNT synergistically composited electrospun thermoplastic polyurethane yarns for wearable sensing. J. Mater. Chem. C 2018, 6, 2258–2269. [Google Scholar] [CrossRef]
- Zhu, D.Y.; Handschuh-Wang, S.; Zhou, X.C. Recent progress in fabrication and application of polydimethylsiloxane sponges. J. Mater. Chem. A 2017, 5, 16467–16497. [Google Scholar] [CrossRef]
- Ren, M.N.; Zhou, Y.J.; Wang, Y.; Zheng, G.Q.; Dai, K.; Liu, C.T.; Shen, C.Y. Highly stretchable and durable strain sensor based on carbon nanotubes decorated thermoplastic polyurethane fibrous network with aligned wavelike structure. Chem. Eng. J. 2019, 360, 762–777. [Google Scholar] [CrossRef]
- Jang, D.; Farooq, S.Z.; Yoon, H.N.; Khalid, H.R. Design of a highly flexible and sensistive multi-functional polymeric sensor incorporating CNTs and carbonyl iron powder. Compos. Sci. Technol. 2021, 207, 108725. [Google Scholar] [CrossRef]
- Ding, L.; Xuan, S.H.; Feng, J.B.; Gong, X.L. Magnetic/conductive composite fibre: A multifunctional strain sensor with magnetically driven property. Compos. Part A Appl. Sci. Manuf. 2017, 100, 97–105. [Google Scholar] [CrossRef]
- Shu, Q.; Hu, T.; Xu, Z.B.; Zhang, J.S.; Fan, X.W.; Gong, X.L.; Xuan, S.H. Non-tensile piezoresistive sensor based on coaxial fiber with magnetoactive shell and conductive flax core. Compos. Part A Appl. Sci. Manuf. 2021, 149, 106548. [Google Scholar] [CrossRef]
- Ge, J.; Wang, X.; Drack, M.; Volkov, O.; Liang, M.; Bermudez, G.S.C.; Illing, R.; Wang, C.A.; Zhou, S.Q.; Fassbender, J.; et al. A bimodal soft electronic skin for tactile and touchless interaction in real time. Nat. Commun. 2019, 10, 4405. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Chen, H.T.; Su, Z.M.; Chen, X.X.; Miao, L.M.; Zhang, J.X.; Cheng, X.L.; Zhang, H.X. Highly Compressible Integrated Supercapacitor-Piezoresistance-Sensor System with CNT-PDMS Sponge for Health Monitoring. Small 2017, 13, 1702091. [Google Scholar] [CrossRef] [PubMed]
- Chen, M.T.; Zhang, L.; Duan, S.S.; Jing, S.L.; Jiang, H.; Li, C.Z. Highly Stretchable Conductors Integrated with a Conductive Carbon Nanotube/Graphene Network and 3D Porous Poly(dimethylsiloxane). Adv. Funct. Mater. 2014, 24, 7548–7556. [Google Scholar] [CrossRef]
- Wang, S.; Xuan, S.H.; Wang, Y.P.; Xu, C.H.; Mao, Y.; Liu, M.; Bai, L.F.; Jiang, W.Q.; Gong, X.L. Stretchable Polyurethane Sponge Scaffold Strengthened Shear Stiffening Polymer and Its Enhanced Safeguarding Performance. ACS Appl. Mater. Interfaces 2016, 8, 4946–4954. [Google Scholar] [CrossRef]
- Ge, L.; Gong, X.L.; Wang, Y.; Xuan, S.H. The conductive three dimensional topological structure enhanced magnetorheological elastomer towards a strain sensor. Compos. Sci. Technol. 2016, 135, 92–99. [Google Scholar] [CrossRef]
- Hu, T.; Xuan, S.H.; Ding, L.; Gong, X.L. Stretchable and magneto-sensitive strain sensor based on silver nanowire-polyurethane sponge enhanced magnetorheological elastomer. Mater. Des. 2018, 156, 528–537. [Google Scholar] [CrossRef]
- Herren, B.; Webster, V.; Davidson, E.; Saha, M.; Altan, M.; Liu, Y. PDMS Sponges with Embedded Carbon Nanotubes as Piezoresistive Sensors for Human Motion Detection. Nanomaterials 2021, 11, 1740. [Google Scholar] [CrossRef] [PubMed]
- Stepanov, G.V.; Chertovich, A.V.; Kramarenko, E.Y. Magnetorheological and deformation properties of magnetically controlled elastomers with hard magnetic filler. J. Magn. Magn. Mater. 2012, 324, 3448–3451. [Google Scholar] [CrossRef]
- Fu, Y.; Yao, J.J.; Zhao, H.H.; Zhao, G.; Wan, Z.S.; Guo, R.Z. A muscle-like magnetorheological actuator based on bidisperse magnetic particles enhanced flexible alginate-gelatin sponges. Smart Mater. Struct. 2020, 29, 015019. [Google Scholar] [CrossRef]
- Thakur, S.; Sharma, B.; Verma, A.; Chaudhary, J.; Tamulevicius, S.; Thakur, V.K. Recent progress in sodium alginate based sustainable hydrogels for environmental applications. J. Clean. Prod. 2018, 198, 143–159. [Google Scholar] [CrossRef]
- Castello, J.; Gallardo, M.; Busquets, M.A.; Estelrich, J. Chitosan (or alginate)-coated iron oxide nanoparticles: A comparative study. Colloid Surf. A Physicochem. Eng. Asp. 2015, 468, 151–158. [Google Scholar] [CrossRef]
- Sun, H.L.; Zhou, K.K.; Yu, Y.F.; Yue, X.Y.; Dai, K.; Zheng, G.Q.; Liu, C.T.; Shen, C.Y. Highly stretchable, transparent, and bio-friendly strain sensor based on self-recovery ionic-covalent hydrogels for human motion monitoring. Macromol. Mater. Eng. 2019, 10, 1900227. [Google Scholar] [CrossRef]
- Huang, W.J.; Dai, K.; Zhai, Y.; Liu, H.; Zhan, P.F.; Gao, J.C.; Zheng, G.Q.; Liu, C.T.; Shen, C.Y. Flexible and Lightweight Pressure Sensor Based on Carbon Nanotube/Thermoplastic Polyurethane-Aligned Conductive Foam with Superior Compressibility and Stability. ACS Appl. Mater. Interfaces 2017, 9, 42266–42277. [Google Scholar] [CrossRef] [PubMed]
- Obeid, L.; El Kolli, N.; Dali, N.; Talbot, D.; Abramson, S.; Welschbillig, M.; Cabuil, V.; Bee, A. Adsorption of a cationic surfactant by a magsorbent based on magnetic alginate beads. J. Colloid Interface Sci. 2014, 432, 182–189. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Samples | Mass Fraction (wt%) | Glycerol (wt%) | Ultrasonic Oscillation (h) | Vacuum Drying (h) | |
|---|---|---|---|---|---|
| SA | CHI | ||||
| SA1/CHI3 | 1 | 3 | 2 | 0 | 0 |
| SA2/CHI3 | 2 | 3 | 2 | 0 | 0 |
| SA3/CHI3 | 3 | 3 | 2 | 0 | 0 |
| SA3/CHI2 | 3 | 2 | 2 | 0 | 0 |
| SA3/CHI1 | 3 | 1 | 2 | 0 | 0 |
| SA3/CHI2-0 | 3 | 2 | 0 | 0 | 0 |
| SA3/CHI2-4 | 3 | 2 | 4 | 0 | 0 |
| SA3/CHI2-6 | 3 | 2 | 6 | 0 | 0 |
| SA3/CHI2-M | 3 | 2 | 2 | 0.5 | 0 |
| SA3/CHI2-N | 3 | 2 | 2 | 0 | 0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, Y.; Zhao, S.; Wan, Z.; Tian, Y.; Wang, S. Investigation into a Lightweight Polymeric Porous Sponge with High Magnetic Field and Strain Sensitivity. Nanomaterials 2022, 12, 2762. https://doi.org/10.3390/nano12162762
Fu Y, Zhao S, Wan Z, Tian Y, Wang S. Investigation into a Lightweight Polymeric Porous Sponge with High Magnetic Field and Strain Sensitivity. Nanomaterials. 2022; 12(16):2762. https://doi.org/10.3390/nano12162762
Chicago/Turabian StyleFu, Yu, Shijie Zhao, Zhenshuai Wan, Ye Tian, and Shuangkun Wang. 2022. "Investigation into a Lightweight Polymeric Porous Sponge with High Magnetic Field and Strain Sensitivity" Nanomaterials 12, no. 16: 2762. https://doi.org/10.3390/nano12162762
APA StyleFu, Y., Zhao, S., Wan, Z., Tian, Y., & Wang, S. (2022). Investigation into a Lightweight Polymeric Porous Sponge with High Magnetic Field and Strain Sensitivity. Nanomaterials, 12(16), 2762. https://doi.org/10.3390/nano12162762