1. Introduction
The simulation of particulate flows finds application in many fields as it permits a detailed examination of an engineering process. It allows access to data on particle behaviour, for which experimental measuring is complex or costly. It was already applied for the simulation of solid separation processes by Viduka et al. [
1], testing different pulsation profiles of a jigging device, or by Li et al. [
2] regarding the separation of soybeans from mustard seeds. The work presented here is the validation and improvement of a method for direct numerical simulation, also depicting the particle’s shape. The industrial relevance of this topic has been shown, e.g., by Champion et al. [
3] who showed that particle shape significantly influences the performance of drug carriers. A discussion on the industrial relevance of particle shape for products and processes is also given by Davies [
4], who references, e.g., the relevance for the production of rubber, as also stated by Scotti et al. [
5].
On the most coarse level, particles can be depicted as a continuum by considering distributions with Euler–Euler approaches utilising an advection–diffusion equation [
6,
7,
8]. Approaches which treat each particle as separate entity yield more details. With the discrete element method (DEM), e.g., separation processes in a cyclone can be studied [
9] considering the particles as solid spheres. Furthermore, adsorption processes in a static mixer [
10] or packing characteristics of powder [
11] are of interest. The DEM can be used together with various approaches and models for the simulation and representation of the fluid. The coupling of DEM particles with a model for a non-Newtonian turbulent fluid is for example relevant in the simulation of anaerobic digestion [
12]. A review of applications for DEM simulations is given by Zhu et al. [
13].
For more sophisticated studies, hydrodynamic forces on a particle and its shape can be resolved by direct numerical simulations (DNS) [
14]. This enables, e.g., the calculation of drag correlations [
15]. Focusing on the shape, the investigation of the interaction between particles and a rough surface is possible [
16]. At this point, however, proper collision treatment becomes important. For the absence of a significant influence of a fluid, the framework Grains3D [
17,
18] has been presented to investigate arbitrarily shaped convex particles under the influence of gravity and contact forces applying the Gilbert–Johnson–Keerthi algorithm for contact detection and distance calculation. The framework has later been extended to concave shapes by representing them as glued convex shapes [
19]. Considering particles submersed in fluid, a simple approach is the one of glued spheres [
20] to approximate various particle shapes and get more information on the distribution of acting forces. For this approximation, however, the accuracy is limited as the required number of spheres increases drastically for better approximations of a shape. To circumvent this problem, the object can be described by several Lagrange points on the surface, at which the hydrodynamic forces are calculated. This points can be independent of the underlying grid, which represents the fluid. This allows for a high accuracy in depiction of the shape, but requires frequent interpolation between fluid and particle points. This common approach is called immersed boundary method (IBM) [
21]. One of its advantages is that it can be coupled with various approaches to solve the fluid system like the finite element method, the finite volume method or the lattice Boltzmann method (LBM) [
22,
23].
The coupled IBM–LBM has been frequently applied for the investigation of fluid structure interaction problems [
24]. While many studies of, e.g., vortex induced vibrations [
22,
25] or the flow around a torus by Wu and Shu [
26] only consider simpler geometries with analytical representations, mappings for more complex polygons exist, as discussed by Owen et al. [
27]. Nevertheless, more complex structures can be simulated as well as described by Beny and Latt [
28], who simulated multiple propellers on a GPU system. In IBM–LBM, it is possible to also consider simple strings as shown by Tian et al [
22] who simulated filaments in a flow. A comparative study of IBM approaches was performed by Kang and Hassan [
29], who investigated the flow past a cylinder and decaying Taylor–Green vortices.
The homogenized lattice Boltzmann method (HLBM) used in this work, in turn, has very few restrictions regarding the shape, since a voxel representation of almost any object can be chosen for simulations, as shown in [
30]. Very thin objects, however, remain problematic, as they may not be captured by the lattice resolution. The main difference between IBM and HLBM is the way the objects are represented. The former employs Lagrangian points, which allows thin structures but requires interpolations and the creation of a distribution of those points on the surface of the object. The latter directly uses points on the fluid grid. The correct depiction of a structure, in this case, mainly depends on the grid resolution.
The LBM proved to be easy to parallelize due to the fact that most calculations are carried out in a strictly local collision step. This has been investigated for the use on computing clusters with GPU systems [
31] as well as mixed CPU–GPU systems [
32]. For LBM, additional approaches for the simulation of arbitrarily shaped particles are available, which are specific to their method. The most common one is the partially saturated cells method (PSM), in its original version proposed by Noble and Torczynski [
33]. It depicts the object on the fluid grid by assigning a linear combination of a no-slip condition and bulk flow to a grid cell depending on its distance to the actual physical particle boundary. This is possible as LBM operates on a mesoscopic level considering the fluid by distributions of fluid-particles in a phase space. There are several aspects to this approach if moving objects are considered, e.g., the refilling of cells that were previously covered by a particle or the chosen no-slip condition. This has been investigated by Peng et al. [
34].
Another topic is the way the hydrodynamic force is calculated. The stress integration method, e.g., described in [
35,
36], is also applicable for other simulation approaches and not specific to LBM but proved to be inefficient [
37,
38]. An alternative is the momentum exchange algorithm (MEA) [
39,
40], which calculates differences in the momentum via the mentioned particle distributions in the phase space. For this method, various formulations and improvements have been proposed [
41,
42,
43,
44] and are subject to current investigations [
34].
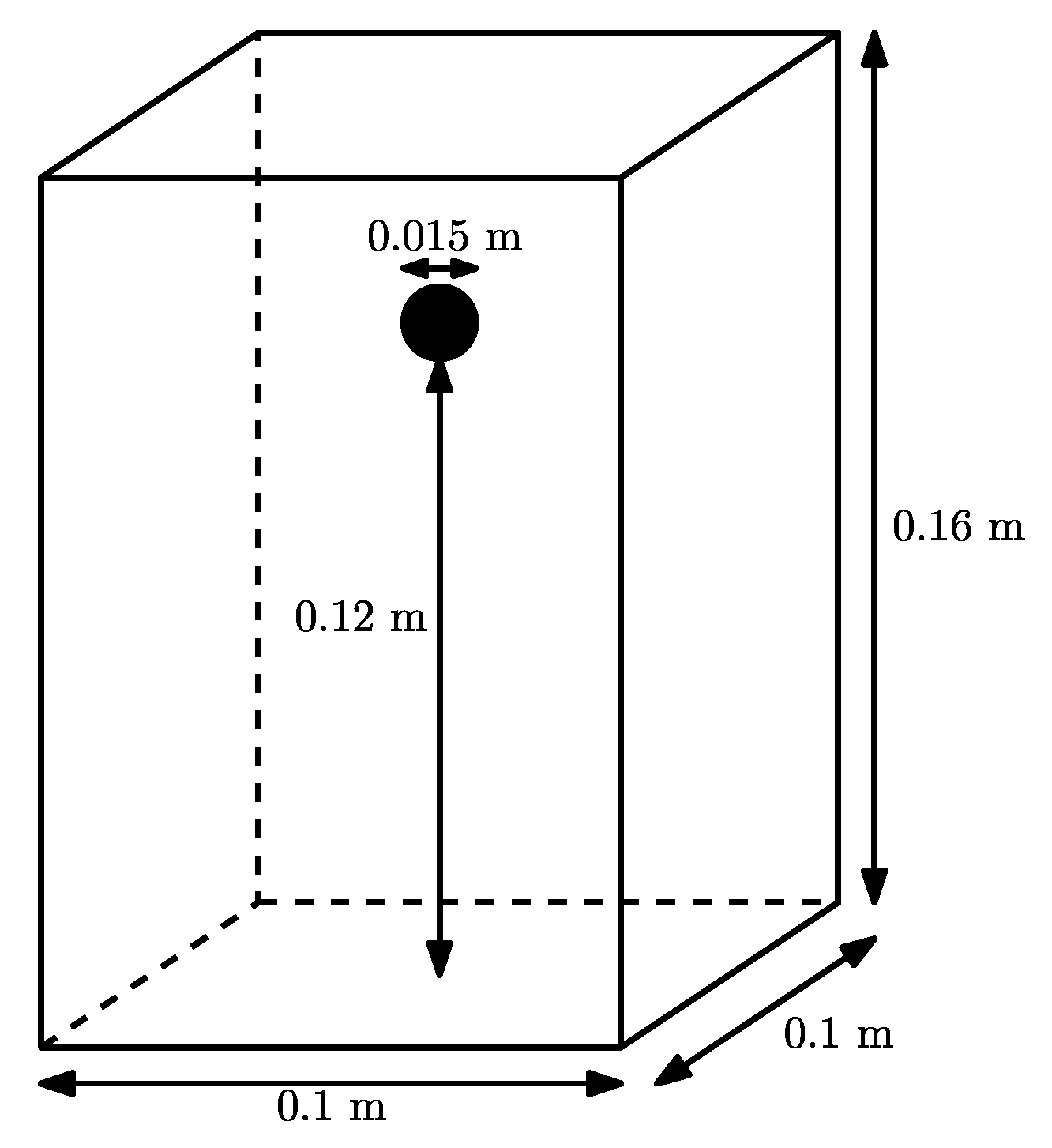
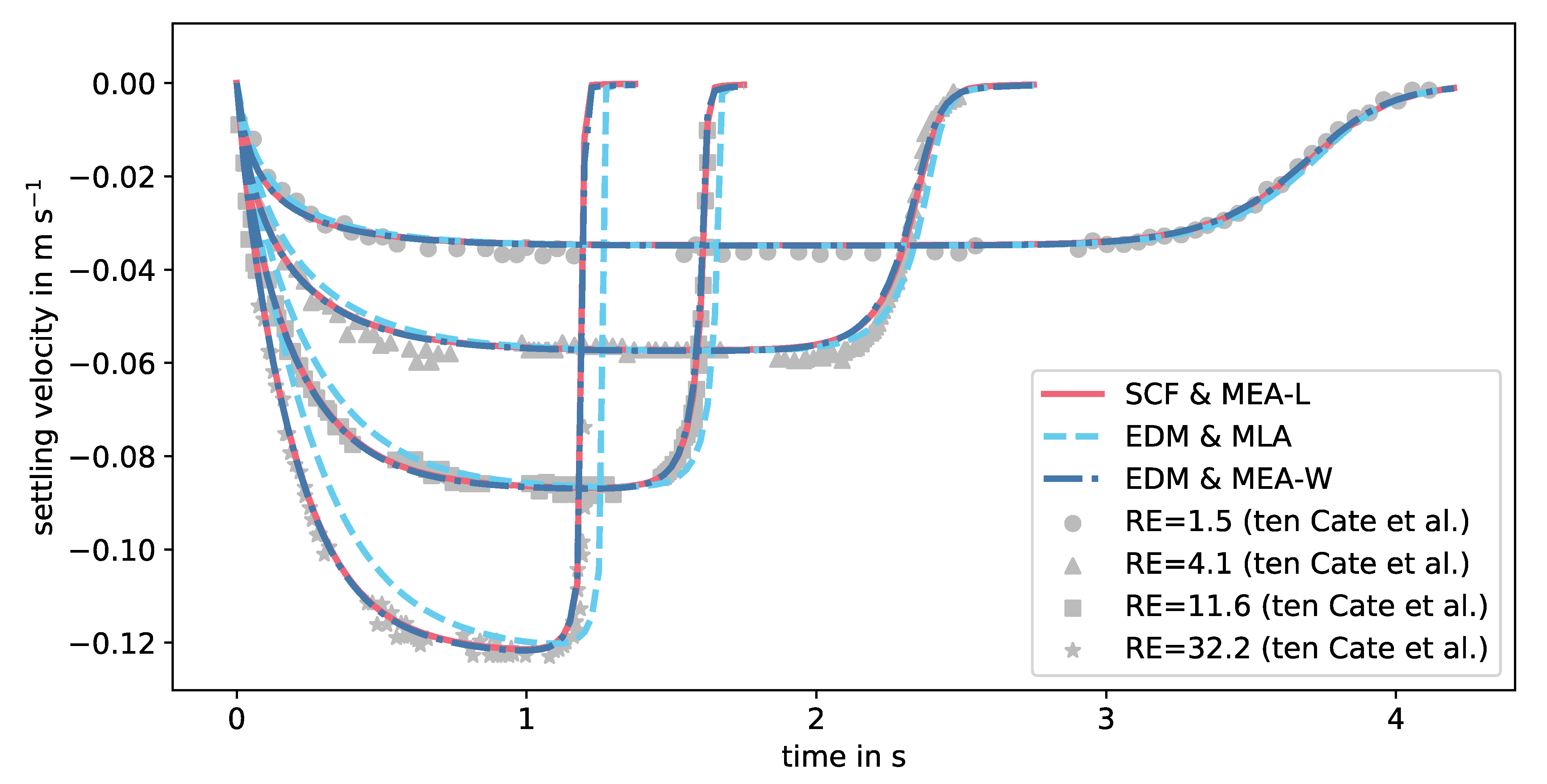
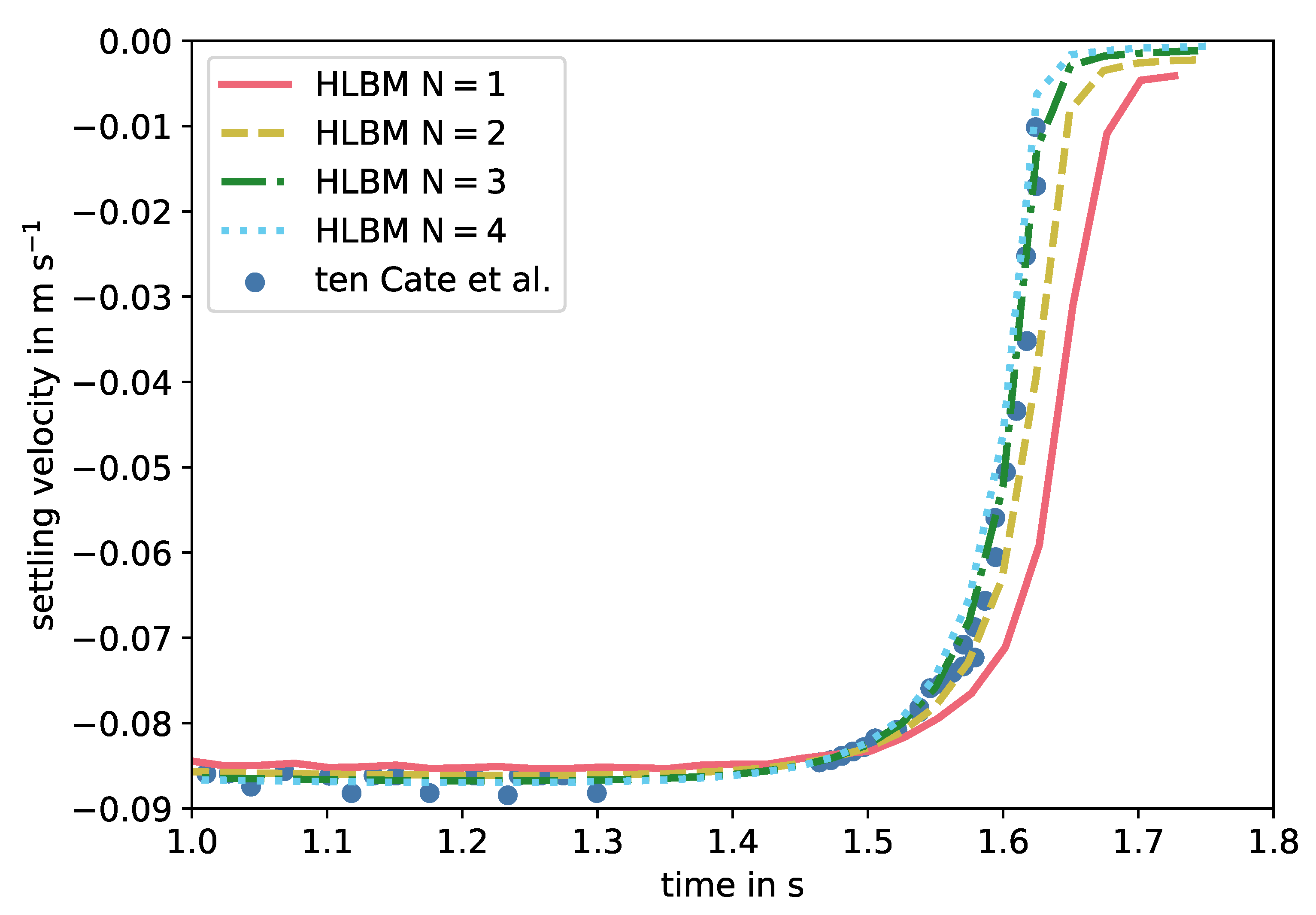
In this study three applications are presented. For the first case of a settling sphere, the results are validated against ten Cate et al. [
45], who performed simulations of a single sphere for different Reynolds numbers and compared the data to particle imaging velocimetry experiments. In addition, the results are compared to various drag correlations discussed in
Section 2.1.
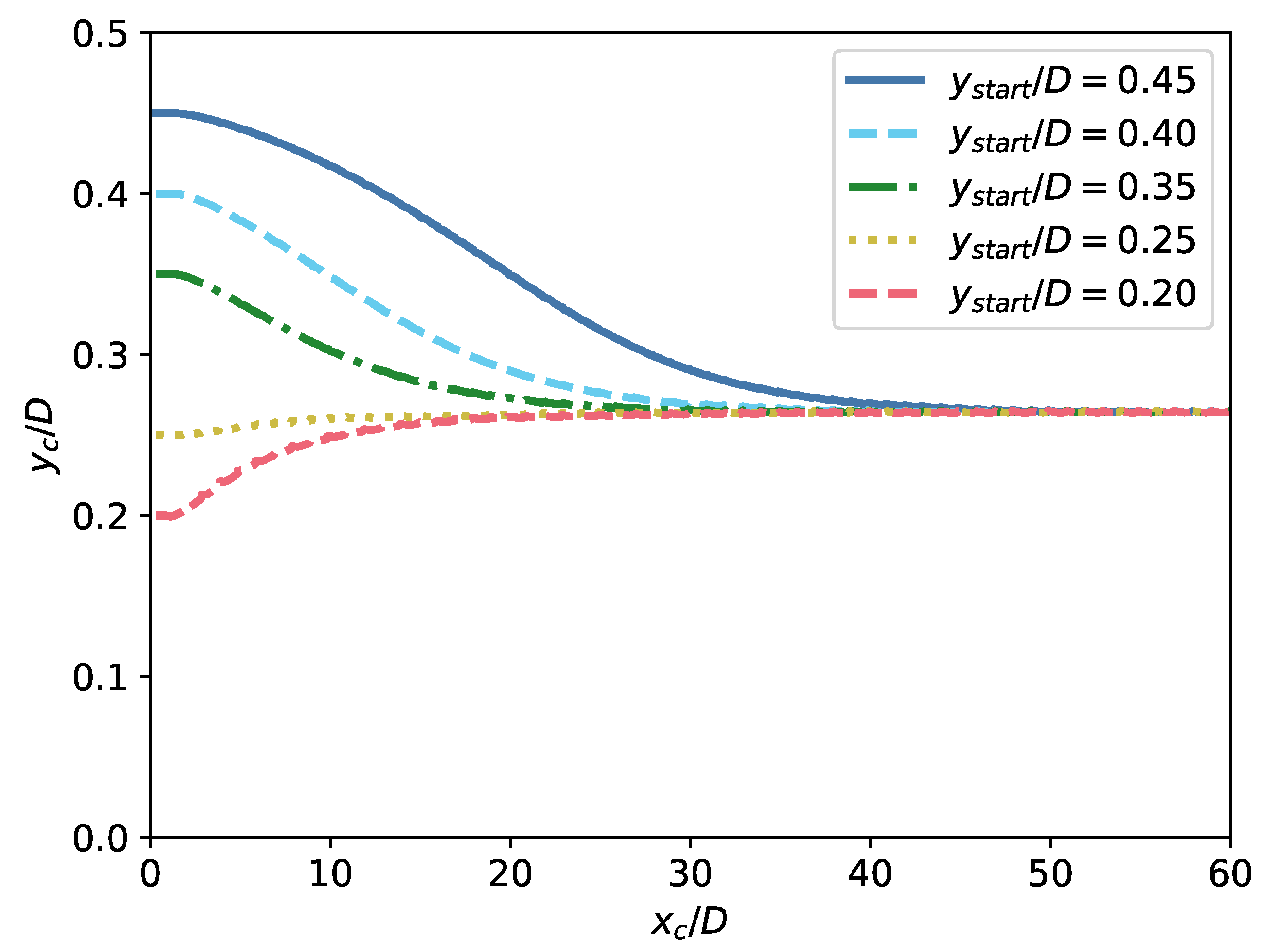
The second case simulates the tubular pinch effect first described by Segré and Silberberg [
46]. They found that a neutrally buoyant particle in a tube flow equilibrates at a position between the tube’s center and its wall and that the results for single particles can be extended to mixtures by linear combination [
47]. Later, Tachibana et al. [
48] found that the equilibrium position depends on the ratio of sphere diameter to tube diameter, which should be larger than
for the effect to be clearly visible. Karnis et al. [
49] studied further the influence of the Reynolds number and the distance between two spheres on this effect.
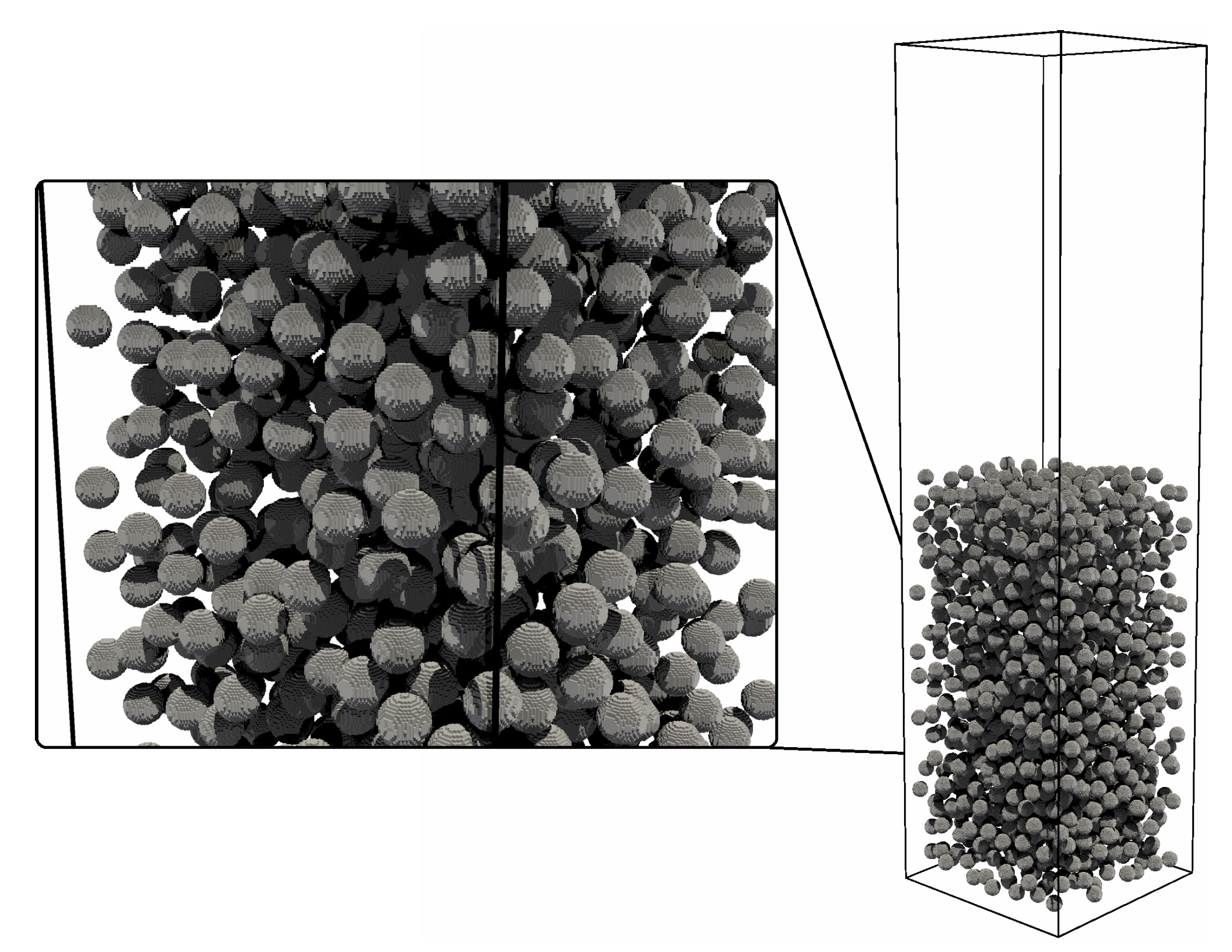
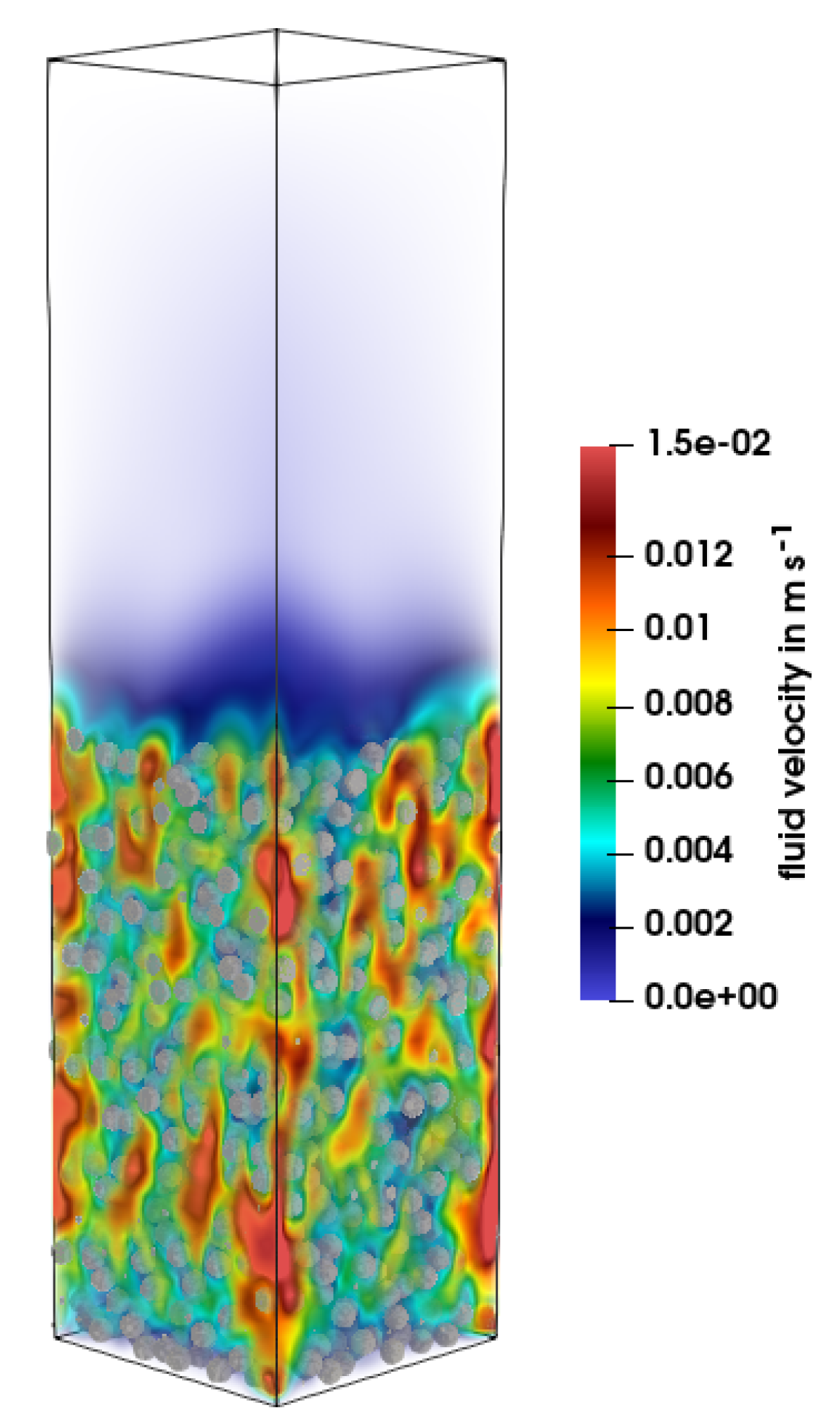
The case of hindered settling is also relevant in many applications of process engineering as usually collectives of particles are processed. This is reflected in many studies simulating this case [
50,
51,
52,
53]. The results are usually compared to an empirical correlation found by Richardson and Zaki [
54]. However, more correlations exist as discussed in
Section 2.2. The results in this study are compared to different correlations to give a better overview.
In this work, the HLBM proposed by Krause et al. [
30,
55] is applied. Contrary to other approaches for moving objects, HLBM does not represent objects by a sharp no-slip boundary but rather with interior fluid utilising a forcing scheme and a transition region to mimic such a condition. This is a similarity to the IBM and leads to the need for further research as existing MEA approaches are developed for no-slip boundaries in the first place. Therefore, a novel momentum loss algorithm (MLA) is tested in this study. The semi-locality (depending on the chosen approach for the calculation of hydrodynamic forces) of the HLBM allows for an easy and efficient implementation on parallel systems without the need of costly interpolations. On the other hand, no refilling of cells is required as in PSM approaches. Besides the new MLA the HLBM is revisited and for the first time evaluated for different forcing schemes and methods for the calculation of hydrodynamic forces. To the knowledge of the authors such a comparative study for HLBM has not been performed before. This finally leads to a new improved scheme, which is validated for the simple case of a settling sphere but also tested for the application in hindered settling simulations and the tubular pinch effect. The results are compared to common experimentally determined correlations and reference simulations. This shows the range of applicability of the presented method, e.g., regarding the Reynolds number. Such tests are currently not found in literature for HLBM, however, this information is of interest when choosing a proper simulation approach depending on an application. Therefore, additionally different cases are examined for the first time with HLBM, which is important as, e.g., the tubular pinch effect can’t be reproduced by all approaches for DNS particle simulations as stated by Li et al. [
35] and Peng et al. [
34]. Additionally, considering the case of hindered settling the investigation of particle interactions, first mentioned by Krause et al [
55], is continued, which was not found in other publications. To the knowledge of the authors, the investigations and findings for HLBM presented in this work have not been shown before.
The remainder of this paper is organized as follows: in
Section 2 the physical background and correlations found in the literature are discussed. Then, in
Section 3 the methods used for the simulations are discussed along with various forcing and MEA schemes to be tested. Finally, in
Section 4 the results of the numerical investigation are presented and the conclusion is drawn in
Section 5. All simulations presented are performed with the open-source lattice Boltzmann C++ framework OpenLB [
56].
2. Modelling
This study focuses on two component systems of rigid particles submersed in a water-like fluid. The latter is described by the incompressible Navier–Stokes equations, given by
The equations are defined on a spatial domain of dimension and a time interval . The fluid velocity is denoted by , while describes the pressure, the fluid’s density and its kinematic viscosity. represents the total of external forces acting on the fluid.
The dynamics of the second component, the rigid particles, are governed by the equations based on Newton’s second law of motion
With the particle mass , the particle velocity and the force acting on the particle , the trajectory of motion can be calculated. The rotational behaviour is modelled analogously with the moment of inertia , the angular velocity and the torque . Here for and for .
In this study, only the gravitational and buoyancy forces are considered as external forces. They are given by
and
for
(
and
for
) for a gravitational acceleration of
g. This means, forces regarding particle-particle and particle-wall contact are neglected in this study and momentum between particles is only transferred via the fluid. As most cases consider only single particles with no relevant wall contact this is reasonable. The only exception is the investigation of hindered settling in
Section 4.3. Here the system is discretized with a decent resolution to allow for sufficient momentum transfer via the fluid. Along with the hydrodynamic force
accounting for the momentum transfer between fluid and particles, the combined forces are given by
for a vector
denoting the distance to the center of mass of a particle.
2.1. Drag Force
While in this study a DNS approach is chosen, for methods considering the particles as single points the hydrodynamic force has to be modelled. This is done via a drag force, accounting for the resistance an object experiences when moving relative to a surrounding fluid. It is defined by
with
being the area of the projection of the object in flow direction. While the determination of the drag coefficient
for various shapes is subject to current research [
57,
58], for spheres many correlations depending on the Reynolds number
have been given. The latter is defined as
for the cases considered in this work, with a particle’s diameter
. For small Reynolds numbers the drag coefficient is described by Stokes’ law [
59]
While in the Newton regime between
and
the coefficient is defined by
, many correlations exist for the transition region of Reynolds numbers between 1 and
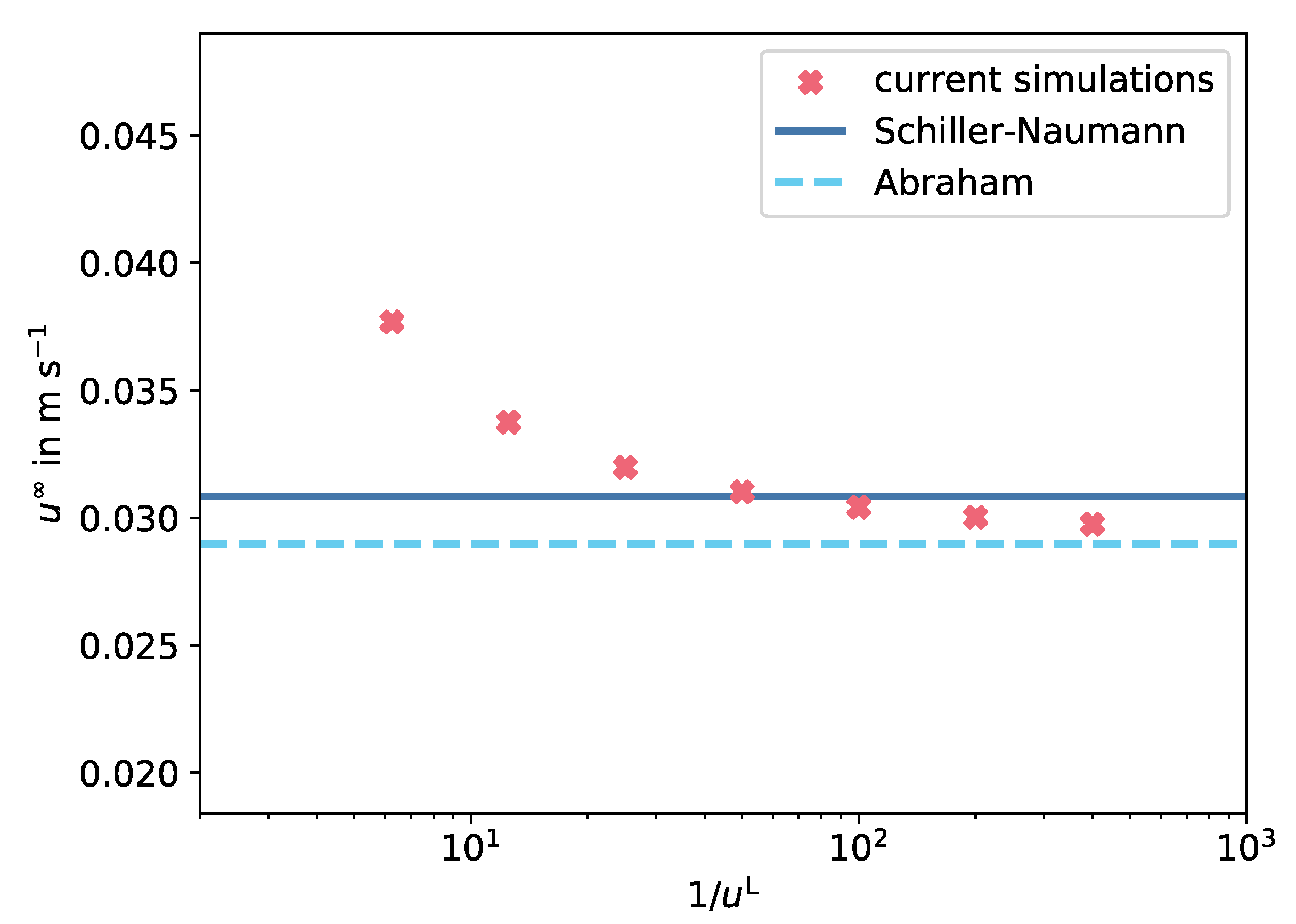
. Notable here is among others the contribution by Abraham [
60], who took the boundary layer into account for a theoretical derivation, leading to
Schiller and Naumann [
61] used an empirical approach to obtain the commonly used approximation of
for the drag coefficient. As many more correlations can be found, the authors refer to Dey et al. [
62] for a comprehensive overview.
2.2. Hindered Settling
The above mentioned drag correlations consider the case of free settling, more precisely the settling of a single sphere in an infinitely extended medium. In practical applications, collectives of particles are more common, which leads to the case of hindered settling caused by interactions between particles. The empirical correlations developed in many past studies proved to be sensible approaches in modeling such behaviour.
The oldest recapitulated here is the one by Steinour [
63], who investigated spheres consisting of tapioca and glass, for a solid volume fraction
of up to
. The experimental conditions correspond to
and
, leading to
The hindered settling velocity is here expressed relative to the terminal settling velocity according to Stokes’
, obtained by inserting Equation (
6) in Equation (
4).
Another correlation was found by Oliver [
64]. In the experiments with Kallodoc particles, Reynolds numbers up to
were reached with solid volume fractions up to
. The results are reflected in the formula for the hindered settling velocity given by
One of the most commonly used expressions was found in investigations performed by Richardson and Zaki, who approached the topic from both, an analytical [
54] and an experimental [
65] perspective. Their formulation was subject to many adaptions regarding accuracy, convenience and extension of applicability [
66,
67,
68,
69]. In the original form it is given by
, with
In a more comprehensive study taking also the results of other authors into account along with their findings, Barnea and Mizrahi [
70] concluded with the general correlation
which is independent of the Reynolds number. While this is the finding for the creeping flow regime (
), Barnea and Mizrahi suggest the application of drag correlations beyond Stokes’ law. Therefore in contrast to other publications, for higher Re the hindered settling velocity is not based on
anymore, but on a terminal settling velocity determined, e.g., by Equation (
8).
3. Methods
For the simulations, the lattice Boltzmann method was applied, which operates on a uniform cubical grid approximating the computational domain. This structure is, together with the discrete phase space, spanned by the d spatial dimensions and a discrete set of q velocities , denoted as lattice. The latter is usually labeled as DdQq. Choosing commonly used sets, the simulations in this study were performed on a D2Q9 and a D3Q19 lattice. As usual, the computations were conducted in lattice units meaning all values were scaled such that the grid spacing and time step size became and , respectively. The superscript indicates that a value is given in lattice units. For reasons of readability, all values in this section were assumed to be in lattice units if not stated otherwise omitting the superscript.
The propagation of particle distributions
, for a discretized time interval
, on the given lattice is described by the lattice Boltzmann equation. Together with the Bhatnagar—Gross—Krook (BGK) collision operator [
71] it reads
The lattice relaxation time
is related to the lattice kinematic viscosity by
Beside a streaming of particle distributions, Equation (
13) describes the relaxation of a system towards an equilibrium state given by the discrete Maxwell–Boltzmann distribution
Here,
are weights originating from a Gauss–Hermite quadrature rule and
is the lattice speed of sound, valid for both lattice configurations used in this work. The density and velocity on a grid point can be calculated by moments of the discrete distributions
respectively. Furthermore, the pressure
p is related to the density
in LBM by
. In the rest of this section, the arguments for density and velocity are omitted for better comprehensibility. For a more comprehensive overview on this simulation approach, the authors refer to [
23].
3.1. Homogenized Lattice Boltzmann Method
The DNS simulations in this study were performed utilizing the HLBM, which was first published by Krause et al. [
55] and was extended to 3D by Trunk et al. [
30]. The extensions of the method to the standard LBM with BGK collision could be divided into three parts. Namely, the representation of an object on the lattice, the forcing scheme applied to the fluid to account for the particles’ presence and a method to calculate the exchanged momentum between an object and fluid for the calculation of forces acting on the object. From this point, the trajectory of a particle is calculated according to Equation (
2) in combination with a velocity-Verlet algorithm [
72,
73].
Object Representation. The depiction of arbitrary shapes within the HLBM is described in detail by Trunk et al. [
30]. Here, only a brief overview is given. From a voxel representation of the object, which did not necessarily have the same spatial resolution as the lattice, parameters like the moment of inertia and the mass were calculated. For a smooth transition between fluid and particle domain, a Gaussian filter was applied. If an analytical representation of the shape was given, a smooth transition could also be defined utilizing trigonometric functions as described by Krause et al. [
55]. This led to a mapping function
, which took on the value of 0 in the fluid domain and 1 in the area covered by the object. In the transition region it yielded values in between. Along with the current position of the object
this defined a domain
which was covered by the body. To account for the presence of particles, the velocity used in the equilibrium distribution Equation (
15) was replaced by the convex combination
The velocity difference could be used in forcing schemes as stated in the next Section.
Forcing Schemes. As the effect on the fluid is given via a velocity difference, in previous publications a forcing scheme according to Shan and Chen [
74] has been chosen, which only modifies the velocity inserted in the Maxwell–Boltzmann distribution. In this study, several forcing schemes (proposed by Shan and Chen [
74], Guo et al. [
75] and Kupershtokh et al. [
76]) were considered (see
Section 3.2) and then tested in
Section 4.1.
Momentum Exchange. Various methods to calculate the exchanged momentum are given in
Section 3.3 and are applied in
Section 4.1. They were evaluated regarding the accuracy of the velocity profile of a falling sphere. In previous publications [
30,
55] an adapted version of the momentum exchange according to Ladd [
39,
40] was used.
3.2. Forcing Schemes
To incorporate a force in LBM, the definition of the velocity handed to the Maxwell–Boltzmann distribution, from now on labeled
, was modified and/or a source term
was added to the right hand side of Equation (
13). In all cases, the fluid velocity given in Equation (
16) was redefined in the presence of a force
to
For a more comprehensive discussion on forcing schemes the authors again refer to Krüger et al. [
23], however, the three forcing schemes used in this study are briefly summarized here.
The approach of Shan and Chen [
74] only modifies the equilibrium velocity to
This scheme originates from methods for multi-component and multi-phase flows, but is also applicable to single-component systems. It is frequently used due to its simplicity and performance advantage, however, a dependency of the results on
is found, e.g., by Huang et al. [
77] examining various forcing schemes for multi-phase LBM. Along with this scheme, a velocity shift method is proposed by Shan and Chen [
74], which states
. Guo et al. [
75] proposed a scheme modifying both the velocity and the source term to
At last, the exact difference method (EDM) by Kupershtokh et al. [
76] only introduces a source term
to the system. The velocity difference
it is based upon is calculated by
, since
in lattice units as stated before. In this approach the velocity
remains just as defined in Equation (
16).
3.3. Methods for Momentum Exchange
In this study, different schemes for the momentum exchange between fluid and particle are also discussed. The first is an adaptation of the MEA by Ladd [
39,
40] which has been applied in [
30,
55]. As shown in [
37,
38], it can be written as
Here
is defined as distribution function according to the velocity
, which is opposite to
, i.e.,
. Various Improvements have been suggested [
41,
78], as this approach fails, e.g., in the simulation of the tubular pinch effect described by Segré and Silberberg [
46,
47], as stated by Peng et al. [
34]. In their study, they compared different MEA approaches and tested them along with other aspects of moving boundary implementations. One of the most common approaches is the one by Wen et al. [
42]
It incorporates the particle velocity for higher accuracy and in order to achieve Galilean invariance.
Lastly, a new approach is proposed by the authors denoted as momentum loss algorithm. As in the HLBM objects are depicted with interior fluid rather than with a sharp no-slip boundary, the investigation for alternative approaches to calculate exchanged momentum is of interest. Examined in this work is the method of computing the momentum directly from the introduced forcing for the approaches by Kupershtokh et al. [
76] and Shan and Chen [
74]. For the latter this means
while for the EDM it is slightly different namely,
The forcing schemes and methods for momentum exchange discussed in this section allow for a comparative study. The previously used HLBM approach is based on the forcing introduced by Shan and Chen [
74] and the momentum exchange by Ladd [
39,
40]. According to literature [
34], there are methods available which yield a higher accuracy. This will be investigated in
Section 4.1 leading to an updated version of HLBM which is expected to yield higher accuracy.
5. Conclusions
The homogenized lattice Boltzmann method has been revisited and various forcing schemes and approaches to calculate exchanged momentum have been evaluated. Among the latter is a new proposed algorithm based on the momentum loss on a cell. However, it showed substandard accuracy except in the case of low Reynolds numbers. It is assumed that the hydrodynamic force is overestimated due to effects correlated to the interior fluid. The amount of force contributed by the latter is hardly distinguishable from the amount related to momentum exchanged with the bulk fluid. As most MEAs are constructed for a sharp solid boundary, further research at this point should be considered in the future. Since issues related to the interior fluid also exist for the immersed boundary method, it might be possible to adapt improvements.
Besides this a combination of Kupershtokh forcing and the MEA by Wen et al. [
38] gave the overall best results. This finally leads to an updated version of HLBM, for which the results are in good agreement to literature (e.g., regarding the velocity profile of a settling sphere).
Furthermore, the reproducibility of drag correlations was tested yielding an error of compared to the one by Schiller and Naumann in the range from up to . Therefore, the applicability of HLBM for Reynolds numbers up to the Newton regime is shown.
In the next application case, the tubular pinch effect was investigated in 2 dimensions. Here, the error to reference simulations in the literature regarding the influence of the Reynolds number, the ratio of circle to tube diameter and the distance between the circles, never exceeded .
The authors furthermore showed that the cases of hindered settling can be investigated with HLBM for a sufficient resolution, even without an explicit collision model. With a deviation of to the correlation by Barnea and Mizrahi, the results are in excellent agreement, especially considering the error regarding a single settling particle. For more reliable computations regarding hindered settling, particularly for higher Reynolds numbers, and for bed formation processes an additional collision model is mandatory. The implementation of such is planned for future research, especially to evaluate the actual improvement in the quality of results as an effect of the addition of an explicit contact model.
Overall, the updated version of HLBM performed well across all application cases with good agreement to existing literature regarding experimental and theoretical results.

 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}