
Fuzzy Mathematics-Based Outer-Loop Control Method for Converter-Connected Distributed Generation and Storage Devices in Micro-Grids


Abstract
:1. Introduction
1.1. Motivation
1.2. State-of-the-Art
1.3. Contributions
1.4. Paper Organization
2. Fundamental Background
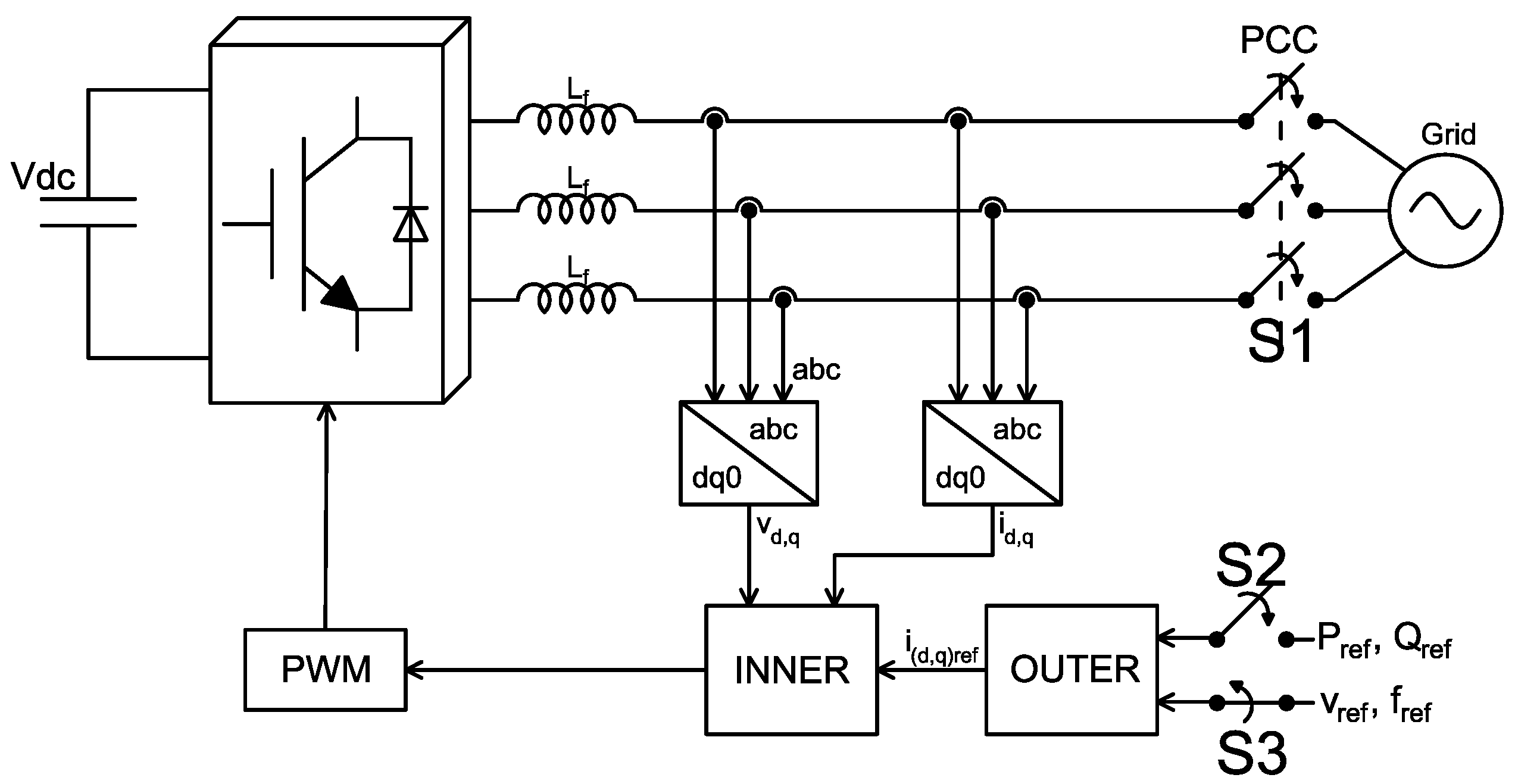
2.1. VSC Control
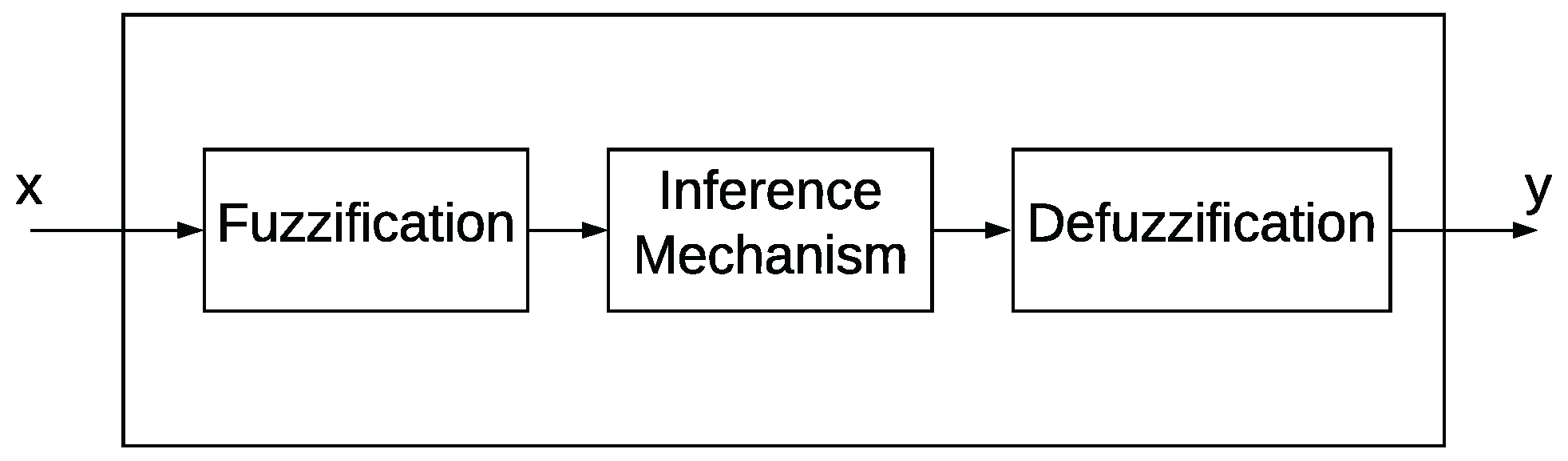
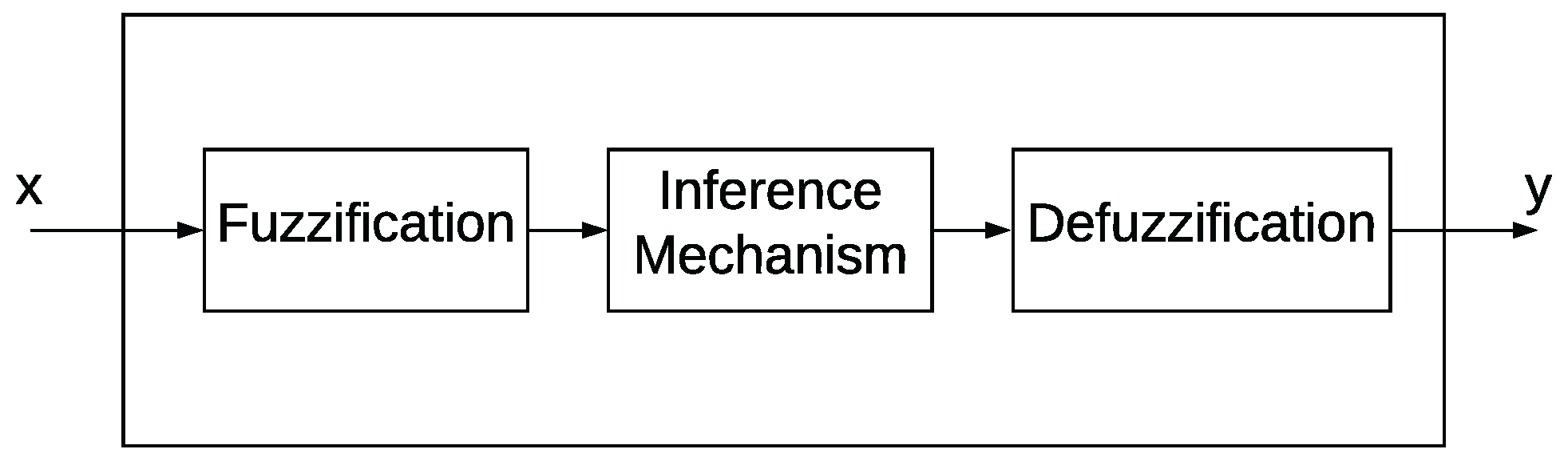
2.2. General Structure of the Fuzzy-Based Control Method
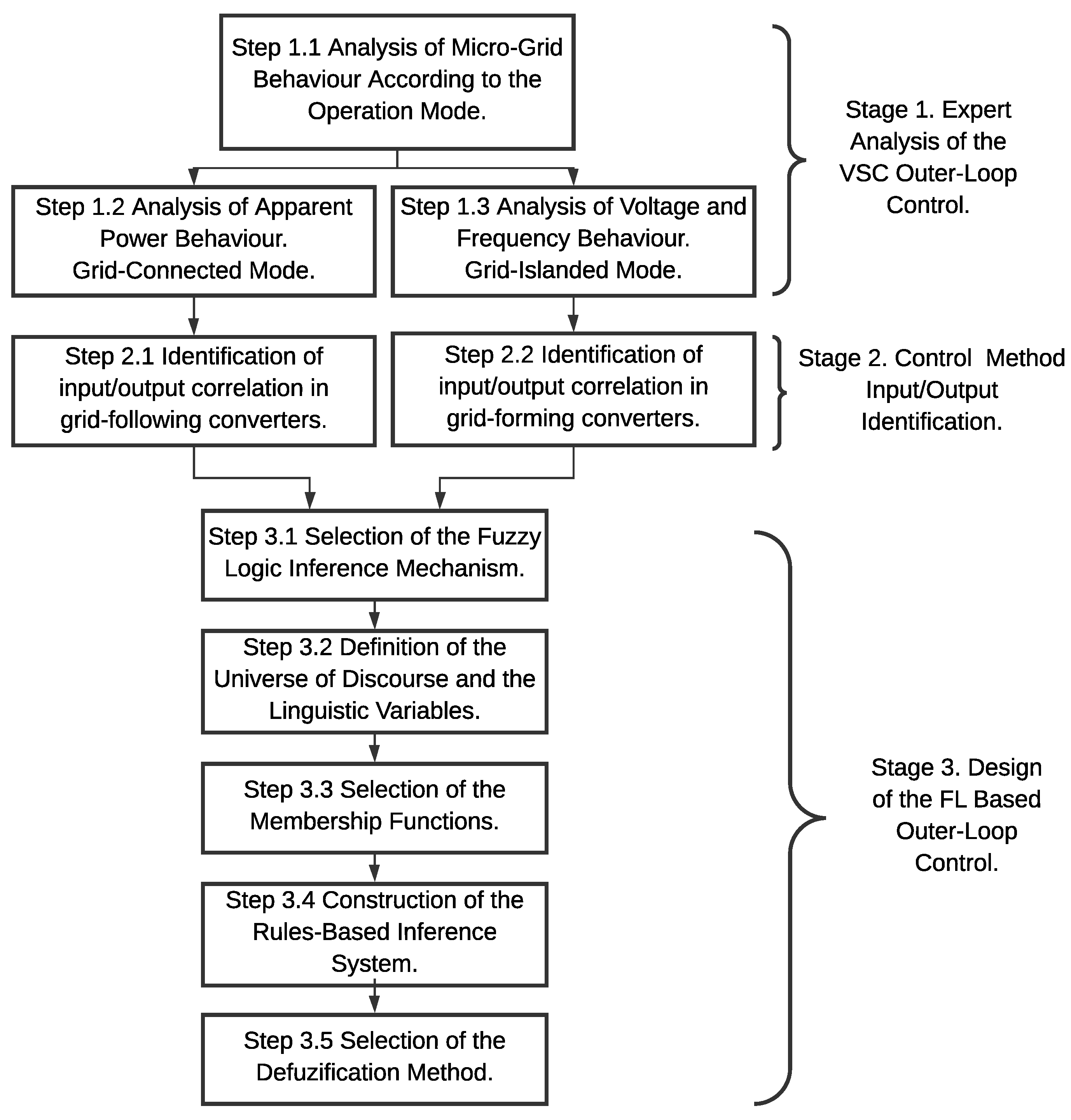
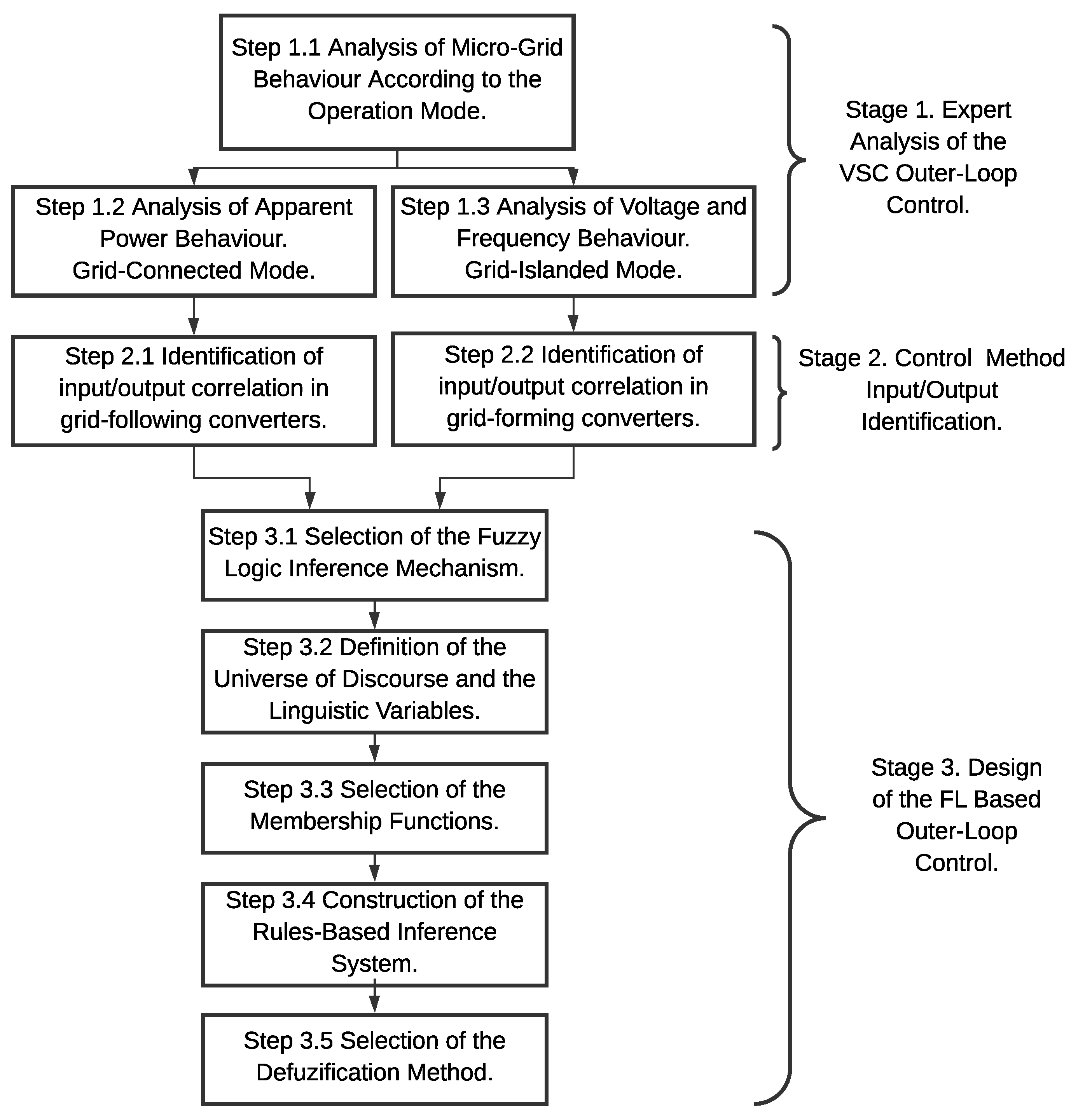
3. Proposed Methodology
3.1. Stage 1. Expert Analysis of the VSC Outer-Loop Control
3.1.1. Step 1.1. Analysis of Micro-Grid Behaviour According to the Operation Mode
3.1.2. Step 1.2. Analysis of Apparent Power Behaviour. Grid-Connected Mode
3.1.3. Step 1.3. Analysis of Voltage and Frequency Behaviour. Grid-Islanded Mode
3.2. Stage 2. Control Method Input/Output Identification
3.2.1. Step 2.1. Identification of Input/Output Correlation in Grid-Following Converters
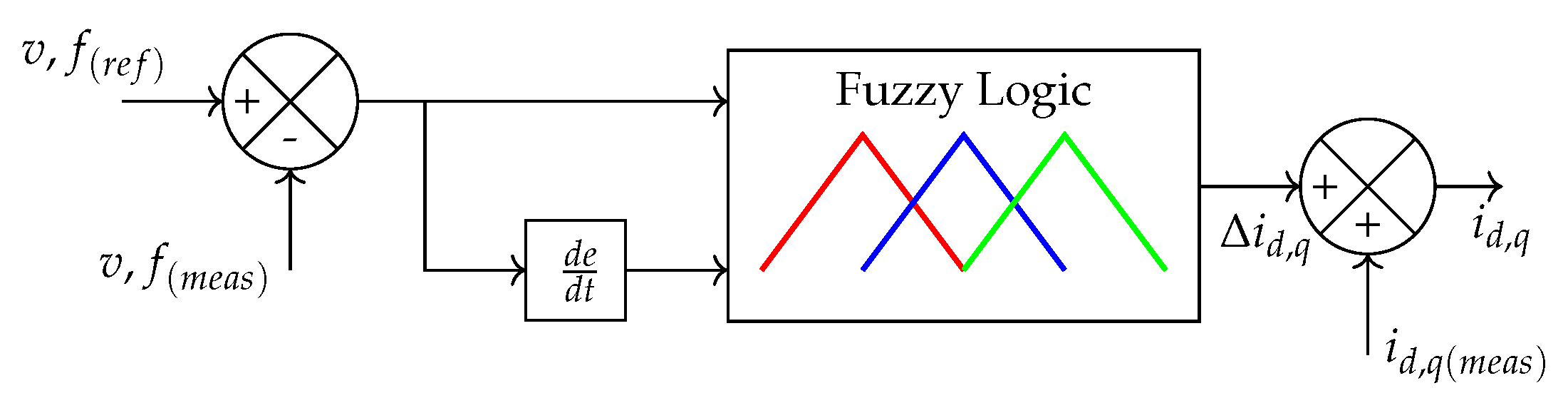
3.2.2. Step 2.2. Identification of Input/Output Correlation in Grid-Forming Converters
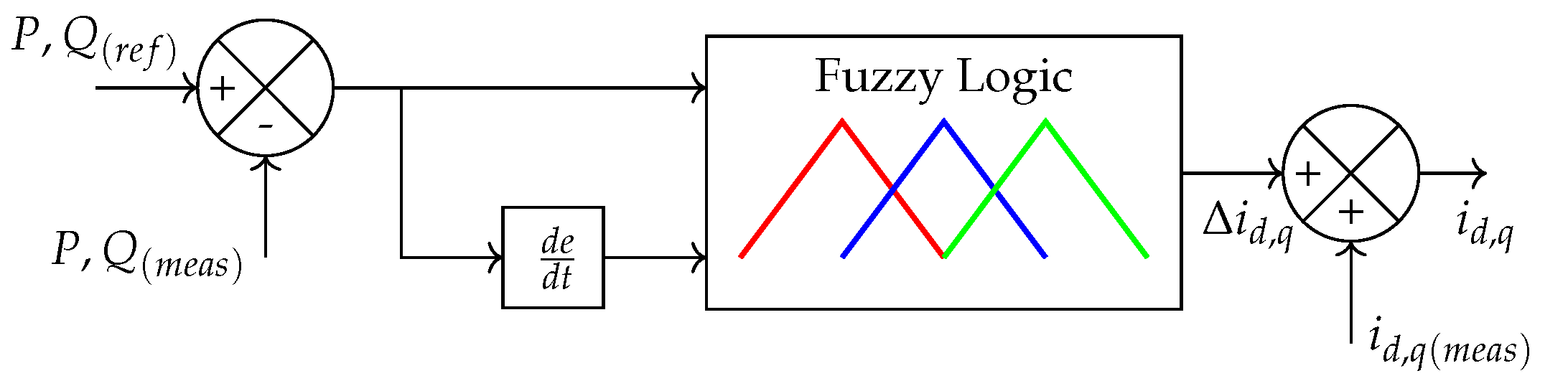
3.3. Stage 3. Design of the FL Based Outer-Loop Control
3.3.1. Step 3.1. Selection of the Fuzzy Logic Inference Mechanism
3.3.2. Step 3.2. Definition of the Universe of Discourse and the Linguistic Variables
3.3.3. Step 3.3. Selection of Membership Functions
3.3.4. Step 3.4. Construction of the Rule-Based Inference System
3.3.5. Step 3.5. Selection of the Defuzzification Method
4. Testing and Analysis of Results
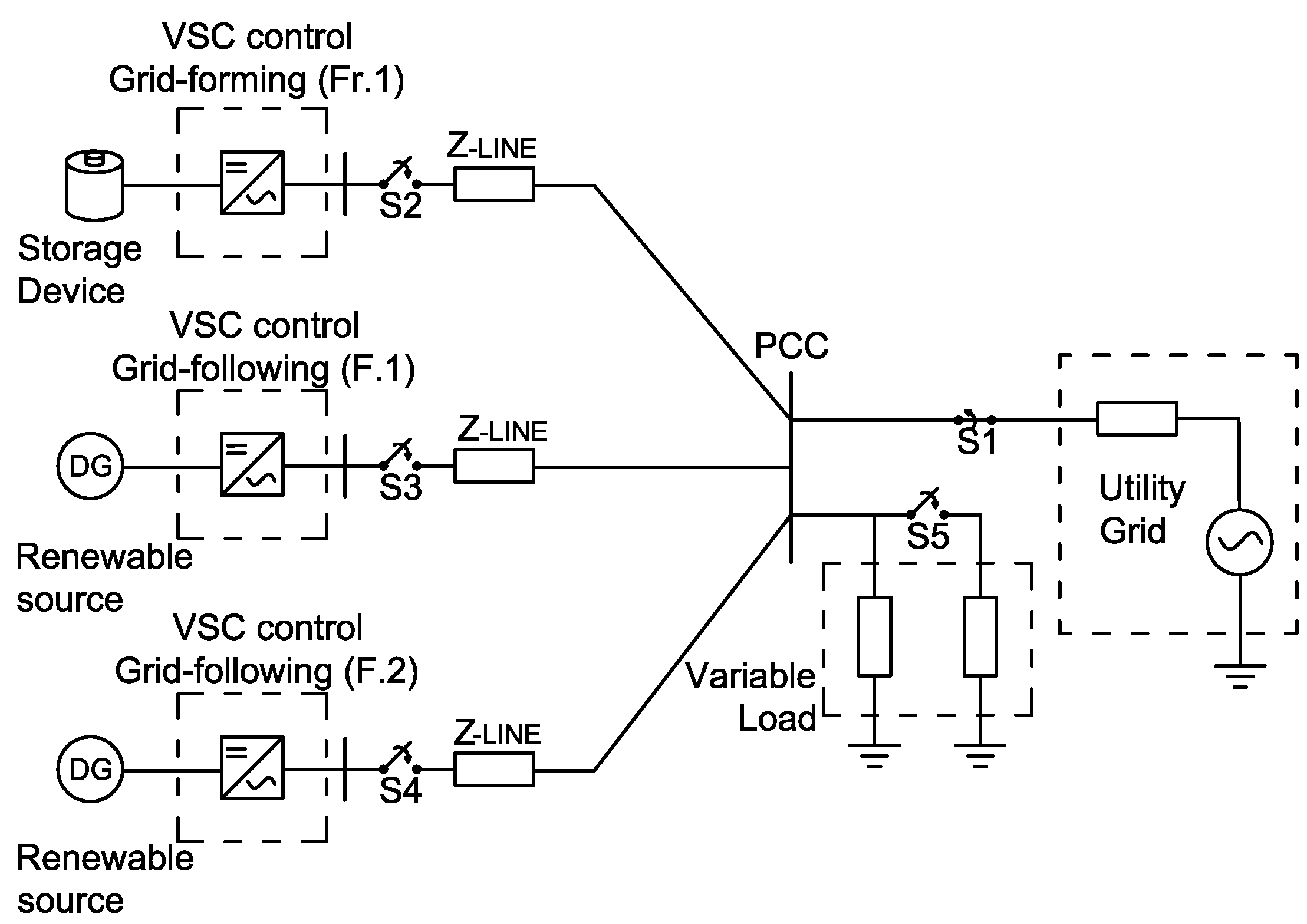
4.1. Test System
4.2. Testing Scenarios
4.3. Definition of the Fuzzy-Based Outer-Loop Control Method
4.3.1. Universe of Discourse
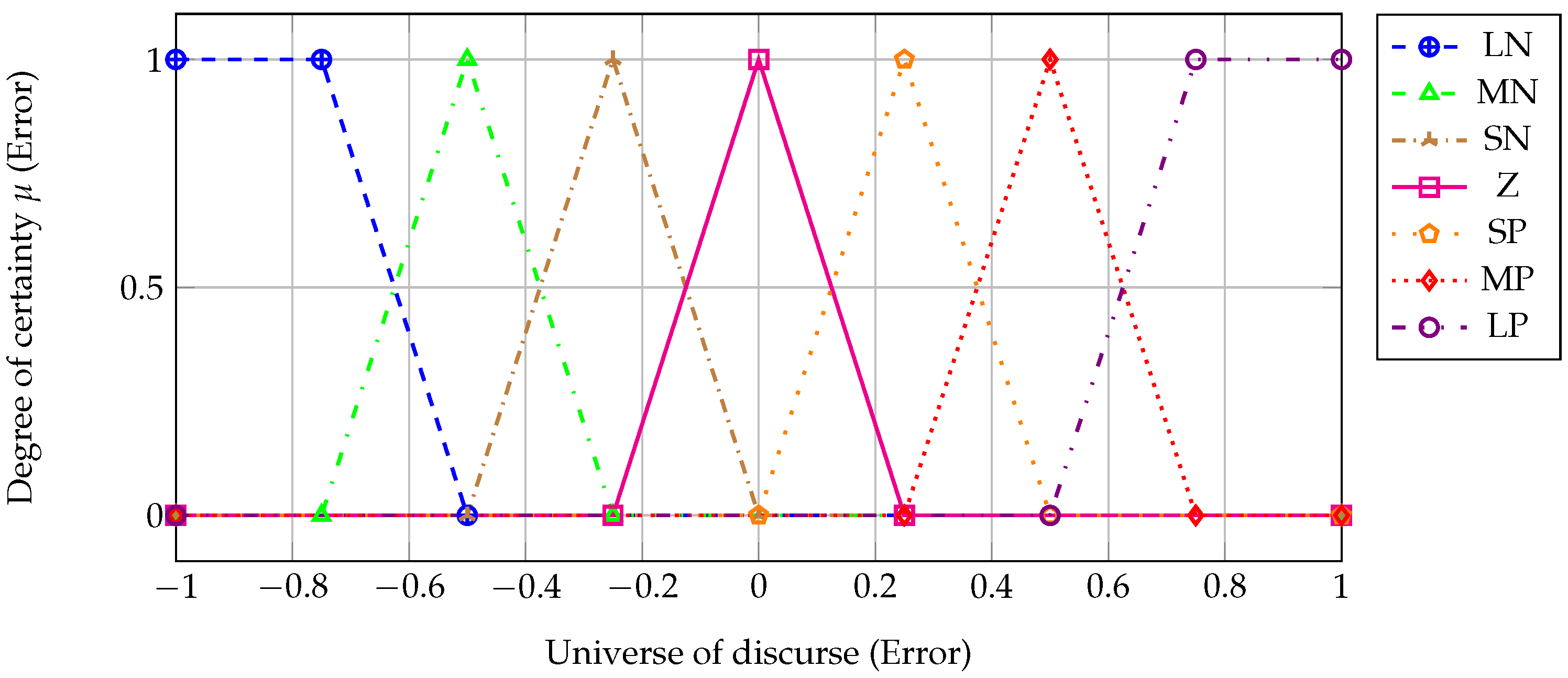
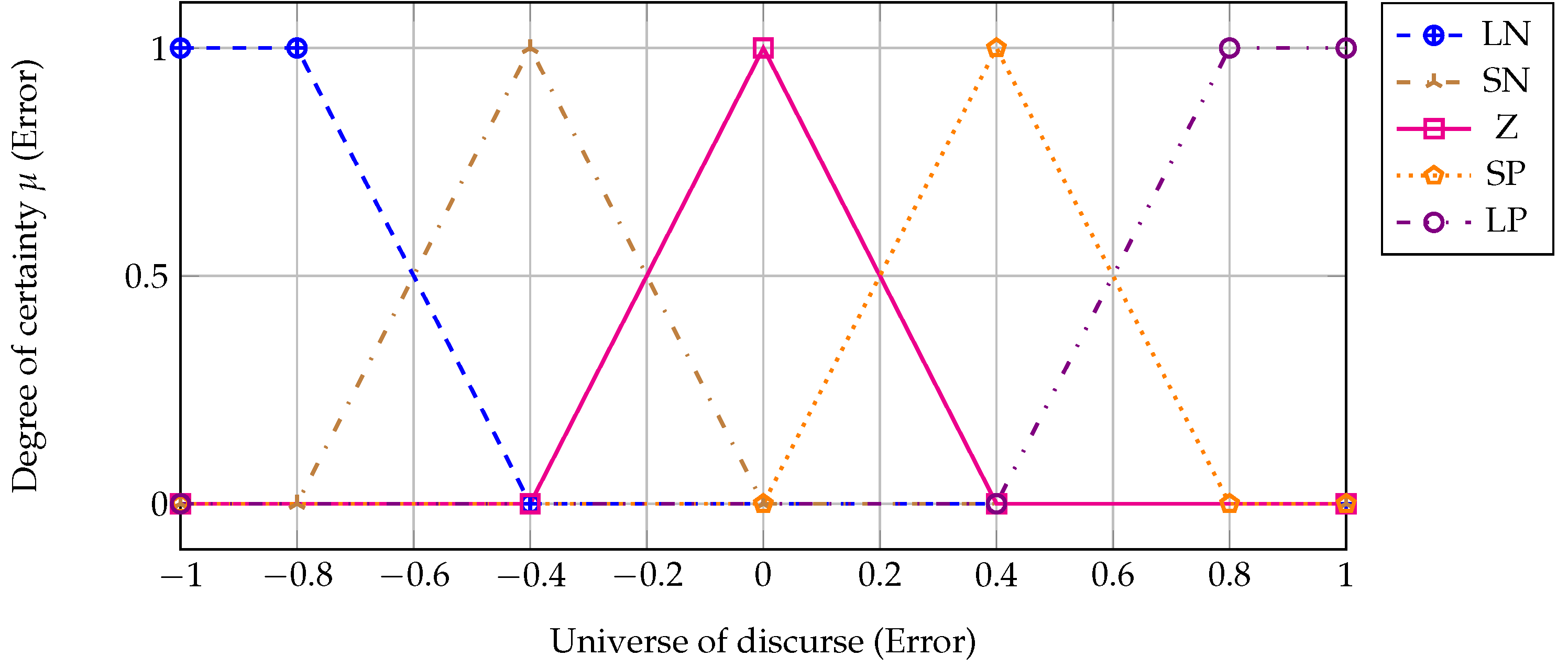
4.3.2. Membership Functions
4.3.3. Definition of the Linguistic Values
4.3.4. Definition of the Rule-Based Inference System
4.4. Results and Analysis
4.4.1. Scenario 1. Connection of a Grid-Forming Converter
4.4.2. Scenario 2. Connection of a Grid-Following Converter
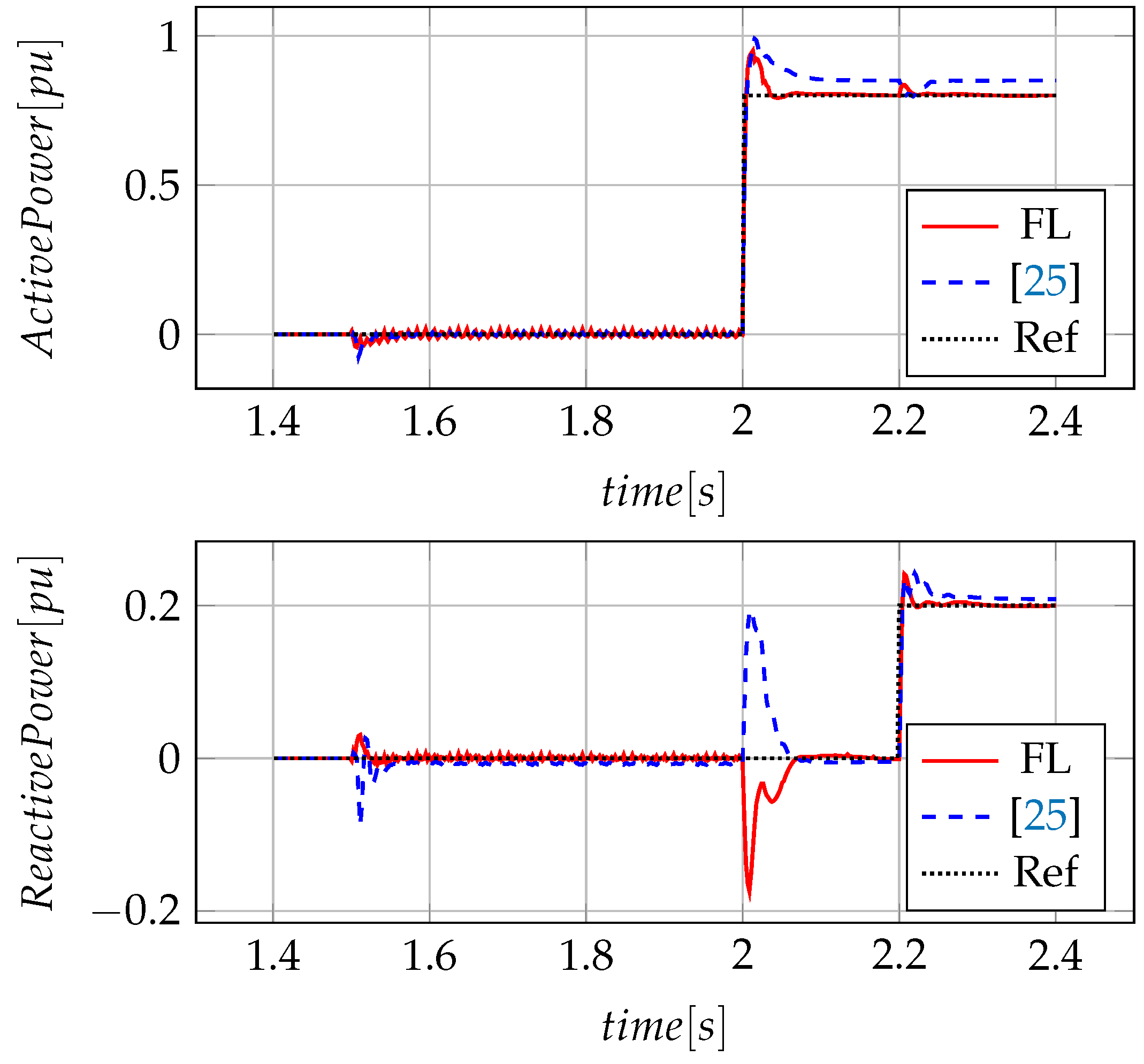
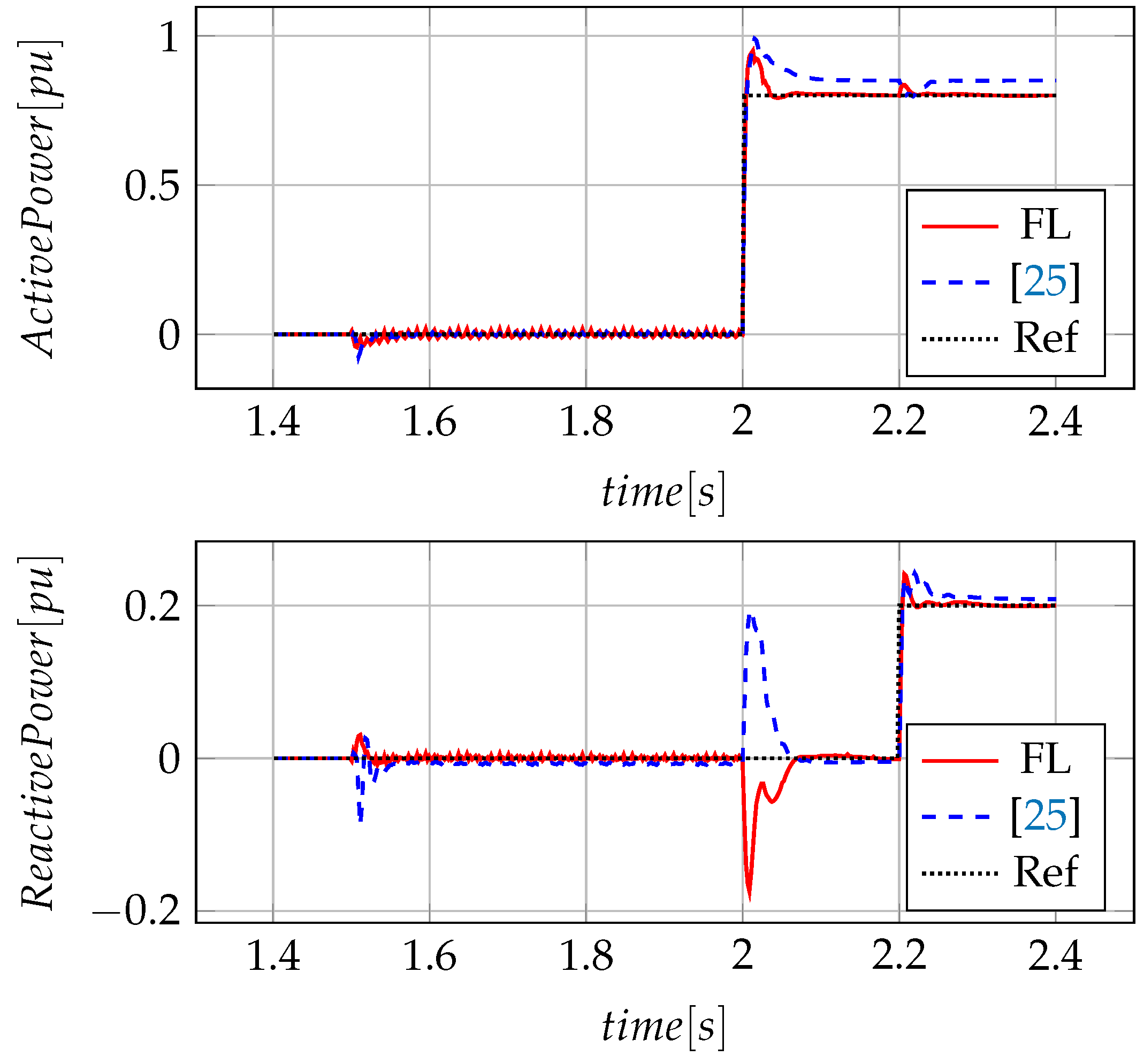
4.4.3. Scenario 3. Power Reference Change in a Grid-Following Converter
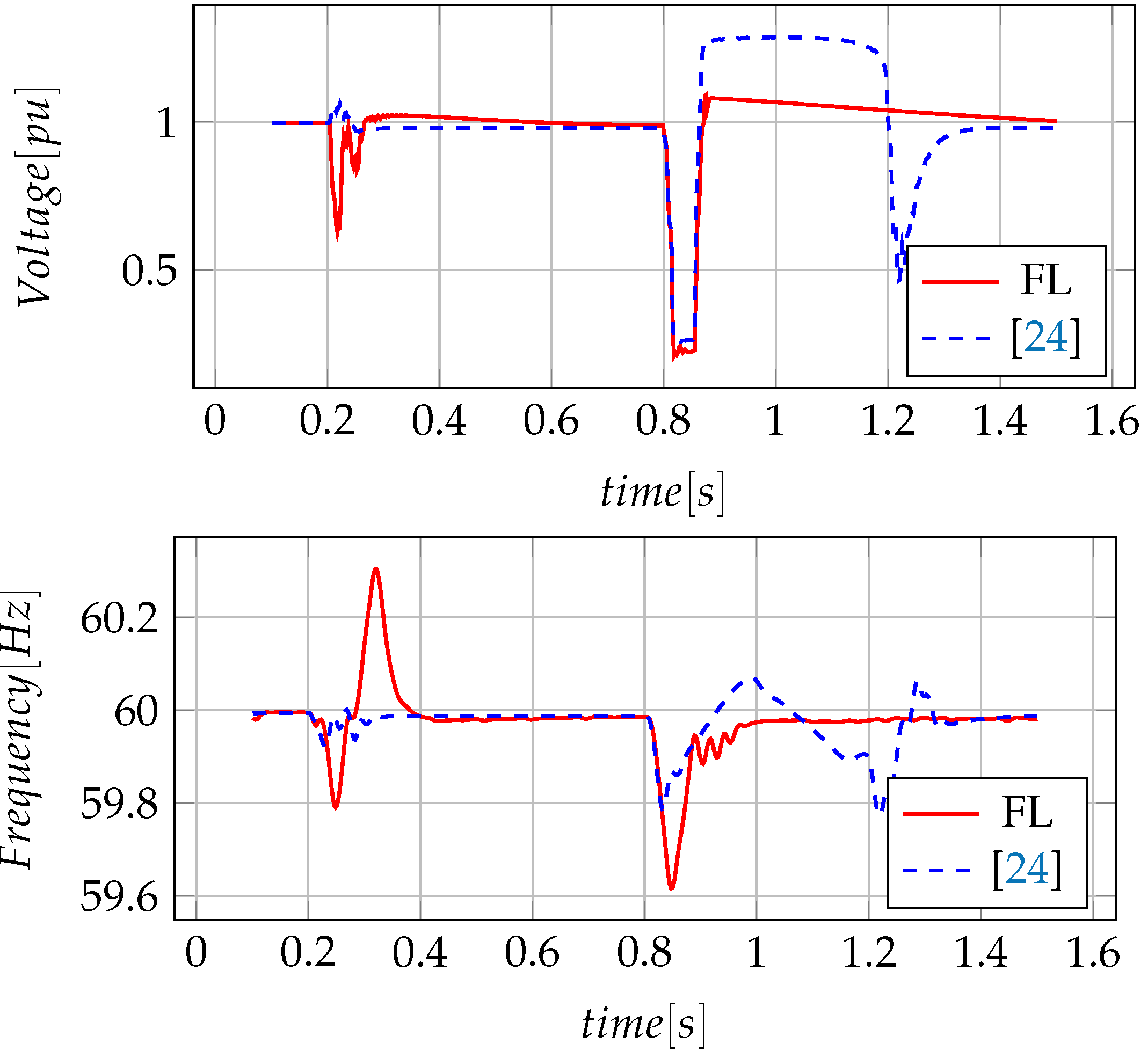
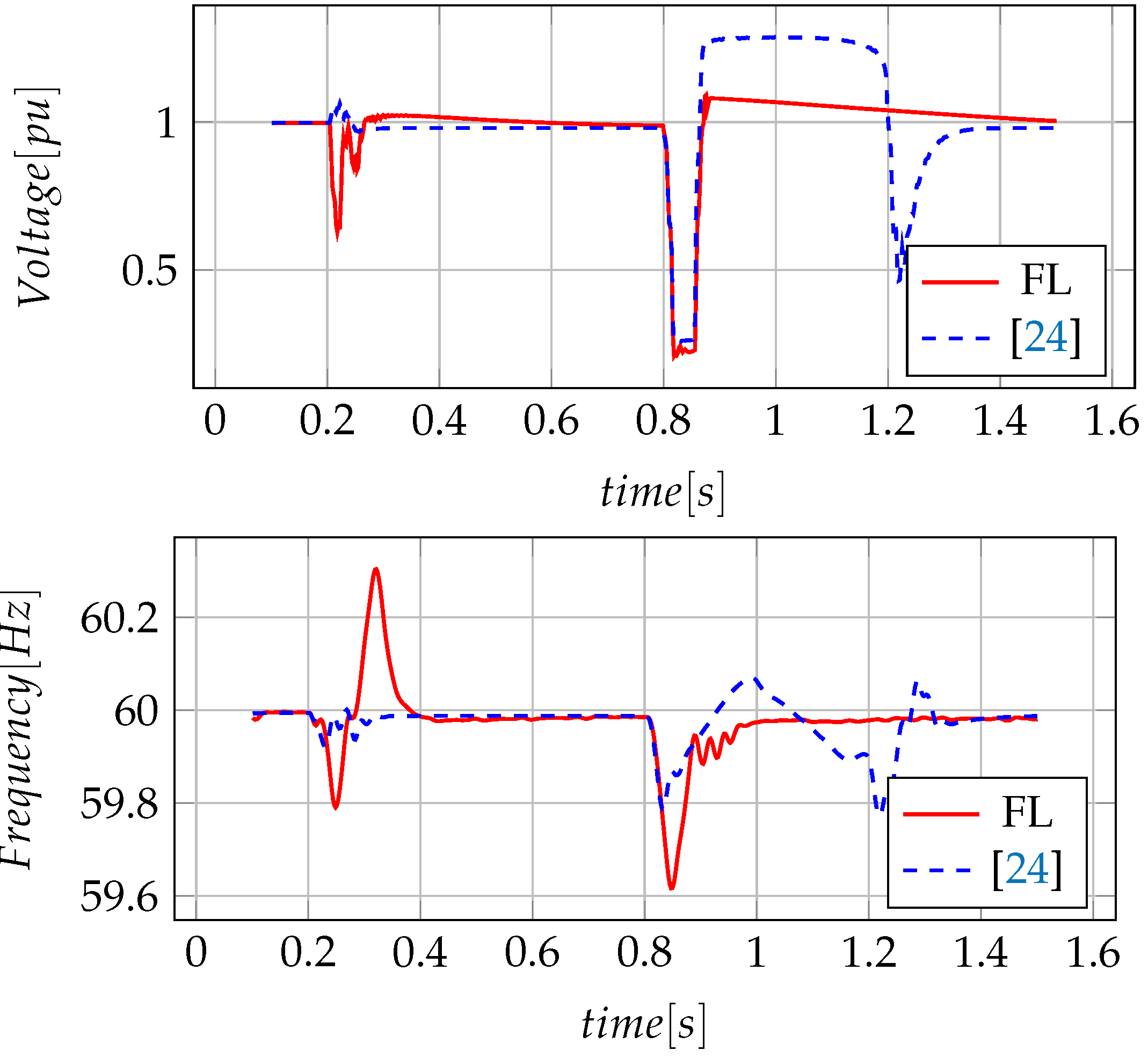
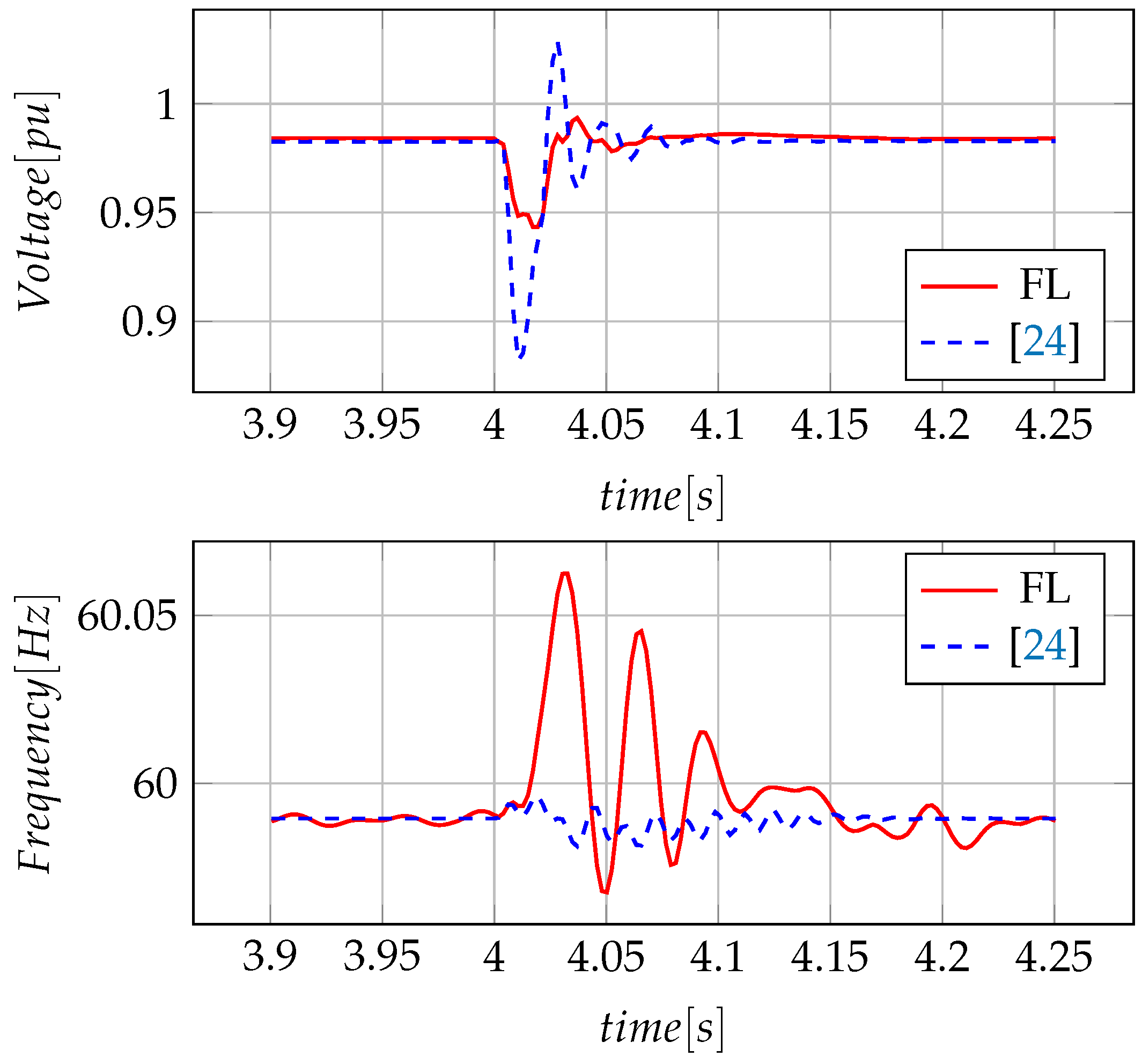
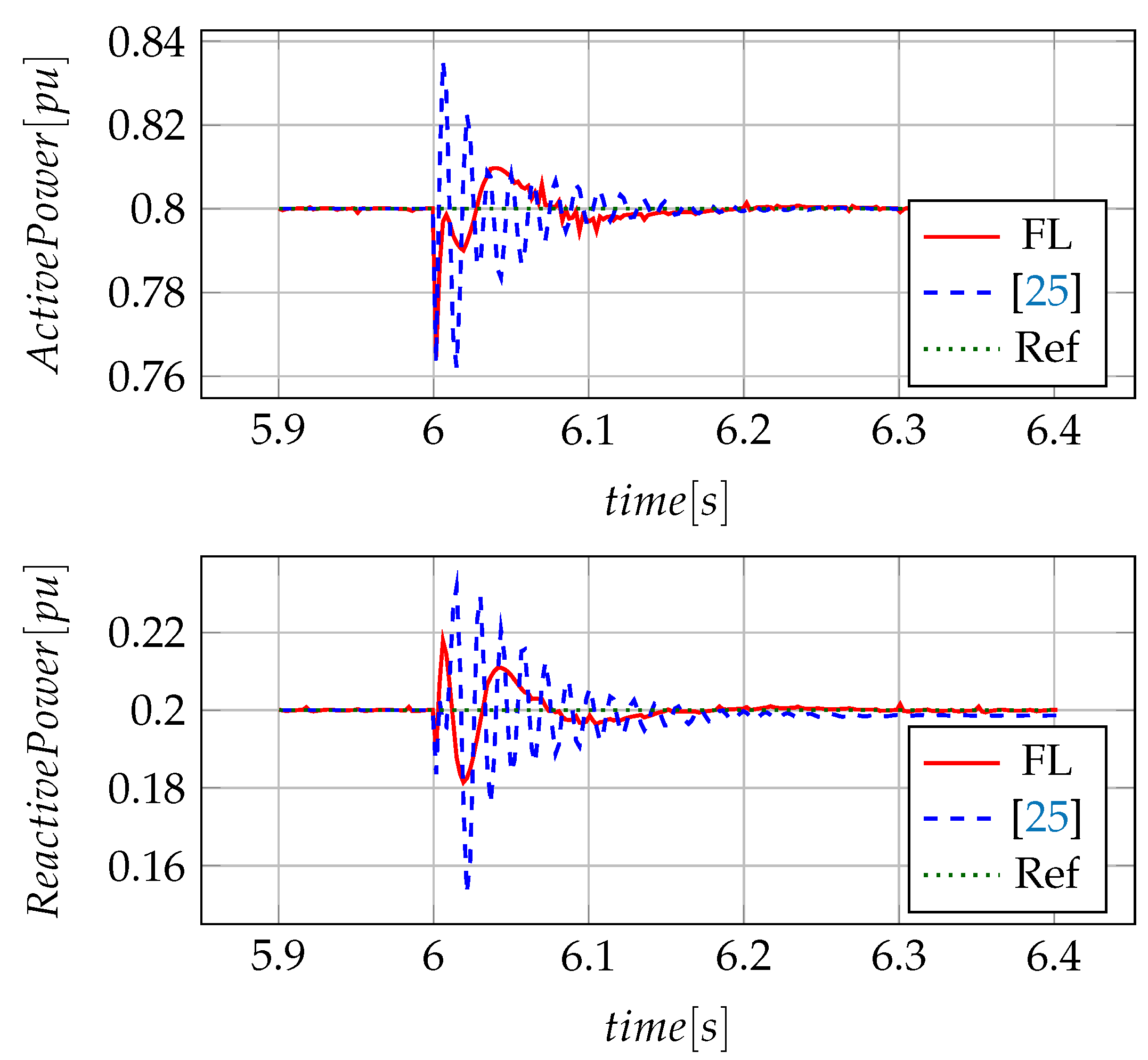
4.4.4. Scenario 4. Three-Phase Faults at the Micro-Grid
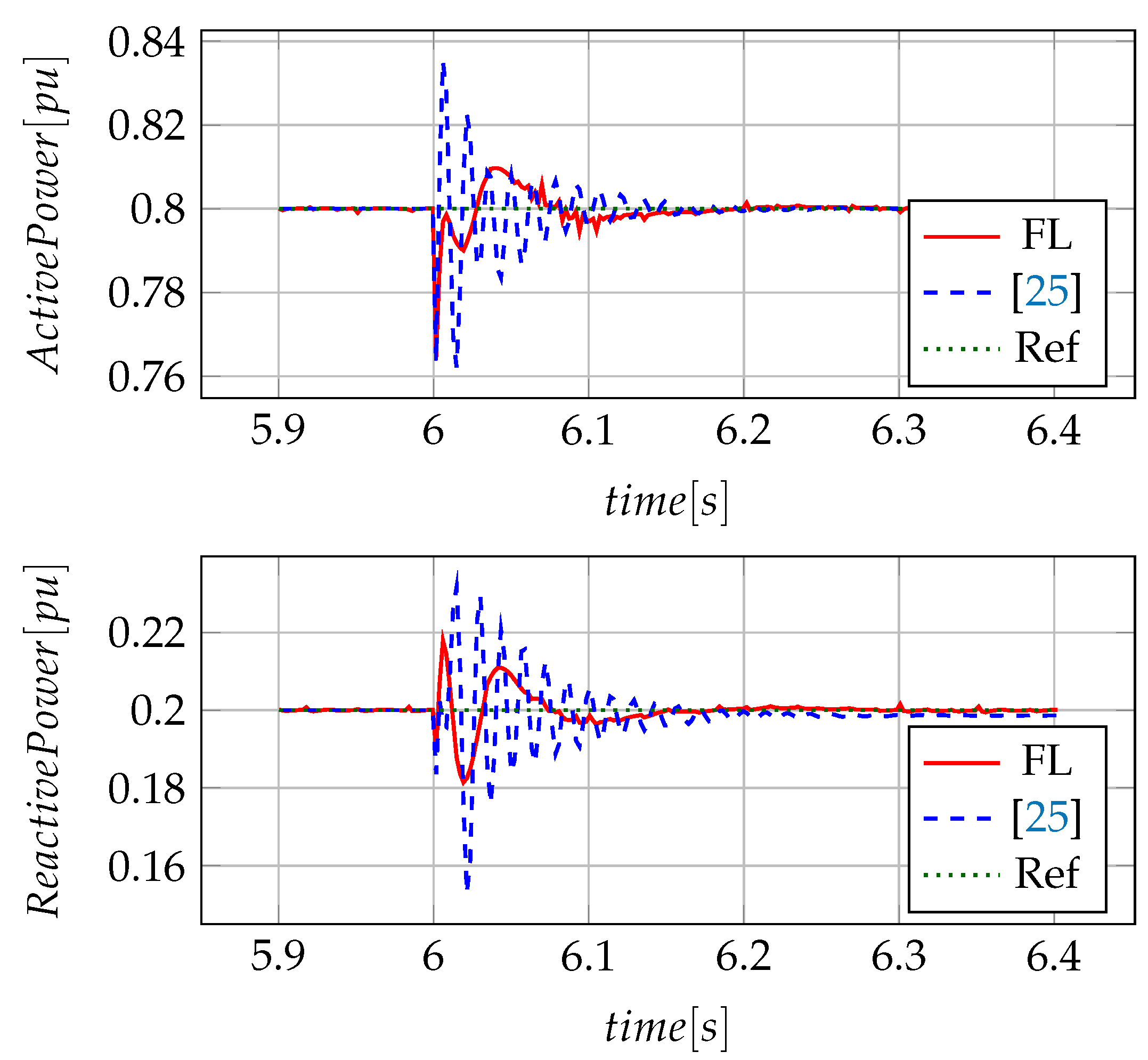
4.4.5. Scenario 5. Load Change
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Farrokhabadi, M.; Cañizares, C.A.; Bhattacharya, K. Unit Commitment for Isolated Microgrids Considering Frequency Control. IEEE Trans. Smart Grid 2018, 9, 3270–3280. [Google Scholar] [CrossRef]
- Jafari, M.; Malekjamshidi, Z.; Lu, D.D.; Zhu, J. Development of a Fuzzy-Logic-Based Energy Management System for a Multiport Multioperation Mode Residential Smart Microgrid. IEEE Trans. Power Electron. 2019, 34, 3283–3301. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A.; Fosso, O.B. A Virtual Synchronous Machine implementation for distributed control of power converters in SmartGrids. Electr. Power Syst. Res. 2015, 122, 180–197. [Google Scholar] [CrossRef]
- Jafari, M.; Malekjamshidi, Z.; Zhu, J.; Khooban, M.H. A Novel Predictive Fuzzy Logic-Based Energy Management System for Grid-Connected and Off-Grid Operation of Residential Smart Microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 1391–1404. [Google Scholar] [CrossRef]
- Sedghi, L.; Fakharian, A. Voltage and frequency control of an islanded microgrid through robust control method and fuzzy droop technique. In Proceedings of the 5th Iranian Joint Congress Fuzzy and Intelligent Systems (CFIS), Qazvin, Iran, 7–9 March 2017; pp. 110–115. [Google Scholar] [CrossRef]
- Mohammad Mahmoudian, E.; Hany F, H.; Osama, A.M. Microgrid Stability Improvement using a Fuzzy-Based PSS Design for Virtual Synchronous Generator. In Proceedings of the SoutheastCon 2018, St. Petersburg, FL, USA, 19–22 April 2018; pp. 1–5. [Google Scholar]
- Lin, F.J.; Chen, C.I.; Xiao, G.D.; Chen, P.R. Voltage Stabilization Control for Microgrid with Asymmetric Membership Function-Based Wavelet Petri Fuzzy Neural Network. IEEE Trans. Smart Grid 2021, 12, 3731–3741. [Google Scholar] [CrossRef]
- Barrero-González, F.; Milanés-Montero, M.; González-Romera, E.; Roncero-Clemente, C.; González-Castrillo, P. El Control de Potencia y Frecuencia en los Sistemas Eléctricos Multiárea. Revisión y Nuevos Retos. Rev. Iberoam. Automática Informática Ind. RIAI 2015, 12, 357–364. [Google Scholar] [CrossRef] [Green Version]
- Montoya, O.D.; Garcés, A.; Serra, F.M. DERs integration in microgrids using VSCs via proportional feedback linearization control: Supercapacitors and distributed generators. J. Energy Storage 2018, 16, 250–258. [Google Scholar] [CrossRef]
- Prathyush, M.; Jasmin, E.A. Fuzzy Logic Based Energy Management System Design for AC Microgrid. In Proceedings of the Second International Conference Inventive Communication and Computational Technologies (ICICCT), Coimbatore, India, 20–21 April 2018; pp. 411–414. [Google Scholar] [CrossRef]
- Oprea, S.V.; Bâra, A.; Preda, Ș.; Tor, O.B. A Smart Adaptive Switching Module Architecture Using Fuzzy Logic for an Efficient Integration of Renewable Energy Sources. A Case Study of a RES System Located in Hulubești, Romania. Sustainability 2020, 12, 6084. [Google Scholar] [CrossRef]
- Tephiruk, N.; Kanokbannakorn, W.; Kerdphol, T.; Mitani, Y.; Hongesombut, K. Fuzzy Logic Control of a Battery Energy Storage System for Stability Improvement in an Islanded Microgrid. Sustainability 2018, 10, 1645. [Google Scholar] [CrossRef] [Green Version]
- Sreeleksmi, R.S.; Ashok, A.; Nair, M.G. A fuzzy logic controller for energy management in a PV—Battery based microgrid system. In Proceedings of the 2017 International Conference on Technological Advancements in Power and Energy (TAP Energy), Kollam, India, 21–23 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Pena-Aguirre, J.C.; Barranco-Gutiérrez, A.; Padilla-Medina, J.A.; Espinosa-Calderon, A.; Pérez-Pinal, F.J. Fuzzy Logic Power Management Strategy for a Residential DC-Microgrid. IEEE Access 2020, 8, 116733–116743. [Google Scholar] [CrossRef]
- Roman, R.C.; Precup, R.E.; Petriu, E.M. Hybrid data-driven fuzzy active disturbance rejection control for tower crane systems. Eur. J. Control 2021, 58, 373–387. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, X.; Ji, H.; Hou, Z.; Fan, L. Multi-Agent-Based Data-Driven Distributed Adaptive Cooperative Control in Urban Traffic Signal Timing. Energies 2019, 12, 1402. [Google Scholar] [CrossRef] [Green Version]
- Farah, L.; Hussain, A.; Kerrouche, A.; Ieracitano, C.; Ahmad, J.; Mahmud, M. A Highly-Efficient Fuzzy-Based Controller with High Reduction Inputs and Membership Functions for a Grid-Connected Photovoltaic System. IEEE Access 2020, 8, 163225–163237. [Google Scholar] [CrossRef]
- So, W.-C.; Tse, C.K.; Lee, Y.-S. Development of a fuzzy logic controller for DC/DC converters: Design, computer simulation, and experimental evaluation. IEEE Trans. Power Electron. 1996, 11, 24–32. [Google Scholar] [CrossRef]
- El Khateb, A.; Rahim, N.A.; Selvaraj, J.; Uddin, M.N. Fuzzy-Logic-Controller-Based SEPIC Converter for Maximum Power Point Tracking. IEEE Trans. Ind. Appl. 2014, 50, 2349–2358. [Google Scholar] [CrossRef]
- Hannan, M.A.; Ghani, Z.A.; Hoque, M.M.; Ker, P.J.; Hussain, A.; Mohamed, A. Fuzzy Logic Inverter Controller in Photovoltaic Applications: Issues and Recommendations. IEEE Access 2019, 7, 24934–24955. [Google Scholar] [CrossRef]
- Ray, P.K.; Das, S.R.; Mohanty, A. Fuzzy-Controller-Designed-PV-Based Custom Power Device for Power Quality Enhancement. IEEE Trans. Energy Convers. 2019, 34, 405–414. [Google Scholar] [CrossRef]
- Viswanathan, K.; Oruganti, R.; Srinivasan, D. Nonlinear function controller: A simple alternative to fuzzy logic controller for a power electronic converter. IEEE Trans. Ind. Electron. 2005, 52, 1439–1448. [Google Scholar] [CrossRef]
- Castro, L.; Bueno-López, M.; Mora-Florez, J. Adjustment strategy of a fuzzy control to integrate renewable sources and storage devices in microgrids. In Proceedings of the 2019 IEEE Workshop on Power Electronics and Power Quality Applications (PEPQA), Manizales, Colombia, 30–31 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Olve, M.; D’Arco, S.; Suul, J.A. Evaluation of virtual synchronous machines with dynamic or quasi-stationary machine models. IEEE Trans. Ind. Electron. 2017, 64, 5952–5962. [Google Scholar]
- Farrokhabadi, M.; König, S.; Cañizares, C.A.; Bhattacharya, K.; Leibfried, T. Battery Energy Storage System Models for Microgrid Stability Analysis and Dynamic Simulation. IEEE Trans. Power Syst. 2018, 33, 2301–2312. [Google Scholar] [CrossRef]
- Khalghani, M.R.; Khooban, M.H.; Mahboubi-Moghaddam, E.; Vafamand, N.; Goodarzi, M. A self-tuning load frequency control strategy for microgrids: Human brain emotional learning. Int. J. Electr. Power Energy Syst. 2016, 75, 311–319. [Google Scholar] [CrossRef]
- Qoria, T.; Gruson, F.; Colas, F.; Guillaud, X.; Debry, M.; Prevost, T. Tuning of Cascaded Controllers for Robust Grid-Forming Voltage Source Converter. In Proceedings of the 2018 Power Systems Computation Conference (PSCC), Dublin, Ireland, 11–15 June 2018; pp. 1–7. [Google Scholar]
- Shi, X.; Zhu, J.; Li, L.; Qu, Y. Model predictive control of PWM AC/DC converters for Bi-directional power flow control in microgrids. In Proceedings of the 2015 Australasian Universities Power Engineering Conference (AUPEC), Wollongong, Australia, 27–30 September 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Li, P.; Lian, P.; Li, W.; Zhou, J. Decentralized Coordinated Control of AC/DC Power Interface Via Adaptive Inverse Theory. In Proceedings of the 2018 IEEE Power Energy Society General Meeting (PESGM), Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Cao, B.; Dong, W.; Lv, Z.; Gu, Y.; Singh, S.; Kumar, P. Hybrid Microgrid Many-Objective Sizing Optimization with Fuzzy Decision. IEEE Trans. Fuzzy Syst. 2020, 28, 2702–2710. [Google Scholar] [CrossRef]
- Suul, J.A.; D’Arco, S.; Rodríguez, P.; Molinas, M. Impedance-compensated grid synchronisation for extending the stability range of weak grids with voltage source converters. IET Gener. Transm. Distrib. 2016, 10, 1315–1326. [Google Scholar] [CrossRef] [Green Version]
- Singaravelan, A.K.M. Control of converter fed microgrid using fuzzy controller. In Proceedings of the 2013 International Conference on Energy Efficient Technologies for Sustainability (ICEETS), Nagercoil, India, 10–12 April 2013; pp. 1179–1184. [Google Scholar]
- Kaysal Ahmet, B.R. Design and Analysis of Fuzzy Logic Controllers for Microgrid Voltage Control. In Proceedings of the 2018 2nd International Symposium on Multidisciplinary Studies and Innovative Technologies (ISMSIT), Ankara, Turkey, 19–21 October 2018; pp. 1–6. [Google Scholar]
- Nazmul, S. Fuzzy Control. In Intelligent Control; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar] [CrossRef]
- Dubois, D.; Prade, H.; Bezdek, J. Introduction: Fuzzy Sets in Approximate Reasoning and Intelligent Information Systems Technology. In Fuzzy Sets in Approximate Reasoning and Information Systems; Springer: Berlin/Heidelberg, Germany, 1999. [Google Scholar] [CrossRef]
- Pérez-Londoño, S.; Garcés, A.; Bueno-López, M.; Mora-Flórez, J. Components Modelling in AC Microgrids; Universidad Tecnológica de Pereira: Pereira, Colombia, 2020; Volume 1. [Google Scholar] [CrossRef]
- Zadeh, L. Fuzzy sets. Inf. Control. 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. Scenarios | Switching Times [s] | |||||||
|---|---|---|---|---|---|---|---|---|
| 0.2 | 1.5 | 2.0 | 2.2 | 4.0 | 5.0 | 5.2 | ||
| 1 | Connection of grid-forming converter | Fr.1 | ||||||
| 2 | Connection of grid-following converter | F.1 | F.2 | |||||
| 3 | Reference variation for active power | F.1 | F.2 | |||||
| Reference variation for reactive power | F.1 | F.2 | ||||||
| No. Scenarios | Switching Times (s) | |||||
|---|---|---|---|---|---|---|
| 0.8 | 2.5 | 6.0 | 7.0 | 8.0 | ||
| 4 | Three-phase fault (50 ms) | ✓ | ✓ | ✓ | ||
| Three-phase fault (70 ms) | ✓ | |||||
| 5 | Load change | ✓ | ||||
| Error Derivative | ||||||
|---|---|---|---|---|---|---|
| LN | SN | Z | SP | LP | ||
| Error | LN | Z | SN | LN | LN | LN |
| SN | SP | Z | SN | LN | LN | |
| Z | LP | SP | Z | SN | LN | |
| SP | LP | LP | SP | Z | SN | |
| LP | LP | LP | LP | SP | Z | |
| Error Derivative | ||||||||
|---|---|---|---|---|---|---|---|---|
| LN | MN | SN | Z | SP | MP | LP | ||
| Error | LN | LN | LN | LN | MN | SN | SN | Z |
| MN | LN | LN | MN | SN | SN | Z | SP | |
| SN | LN | MN | SN | SN | Z | SP | SP | |
| Z | MN | SN | SN | Z | SP | SP | MP | |
| SP | SN | SN | Z | SP | SP | MP | LP | |
| MP | SN | Z | SP | SP | MP | LP | LP | |
| LP | Z | SP | SP | MP | LP | LP | LP | |
| Variable | Control Strategy | ||
|---|---|---|---|
| Fuzzy | PI | ||
| IAE | v | 0.926 | 0.853 |
| f | 0.197 | 0.311 | |
| ITAE | v | 6.093 | 4.685 |
| f | 1.014 | 1.904 | |
| Variable | Control Strategy | ||
|---|---|---|---|
| Fuzzy | PI | ||
| IAE | P | 0.459 | 0.795 |
| Q | 0.388 | 0.548 | |
| ITAE | P | 3.566 | 5.412 |
| Q | 3.071 | 3.726 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Castro, L.; Bueno-López, M.; Mora-Flórez, J. Fuzzy Mathematics-Based Outer-Loop Control Method for Converter-Connected Distributed Generation and Storage Devices in Micro-Grids. Computation 2021, 9, 134. https://doi.org/10.3390/computation9120134
Castro L, Bueno-López M, Mora-Flórez J. Fuzzy Mathematics-Based Outer-Loop Control Method for Converter-Connected Distributed Generation and Storage Devices in Micro-Grids. Computation. 2021; 9(12):134. https://doi.org/10.3390/computation9120134
Chicago/Turabian StyleCastro, Lorena, Maximiliano Bueno-López, and Juan Mora-Flórez. 2021. "Fuzzy Mathematics-Based Outer-Loop Control Method for Converter-Connected Distributed Generation and Storage Devices in Micro-Grids" Computation 9, no. 12: 134. https://doi.org/10.3390/computation9120134
APA StyleCastro, L., Bueno-López, M., & Mora-Flórez, J. (2021). Fuzzy Mathematics-Based Outer-Loop Control Method for Converter-Connected Distributed Generation and Storage Devices in Micro-Grids. Computation, 9(12), 134. https://doi.org/10.3390/computation9120134