
Self-Adaptive Acceptance Rate-Driven Markov Chain Monte Carlo Method Applied to the Study of Magnetic Nanoparticles


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
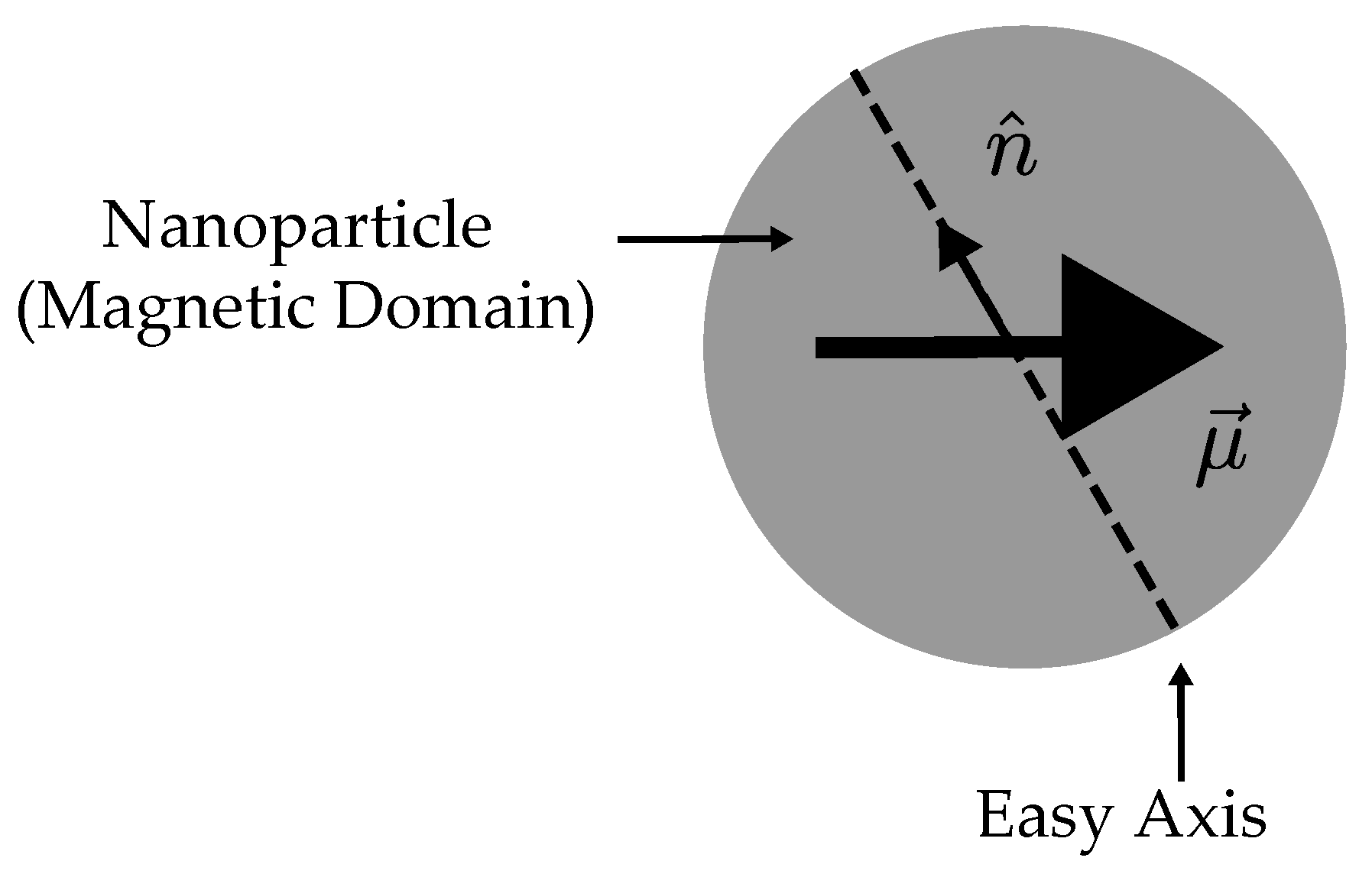
2.1. Magnetic Nanoparticle Model
2.2. Néel Relaxation
2.3. Metropolis Algorithm Driven by Acceptance Rate
| Algorithm 1 Metropolis–Hastings Algorithm. |
| Given the current state , then: |
|
| Return and . |
| Algorithm 2 Main Algorithm. |
| Set the initial conditions: magnetic field, temperature, magnetic moments orientations, the easy axes orientations and so on. |
|
| Algorithm 3 Cone Aperture Update. |
|
3. Results and Discussion
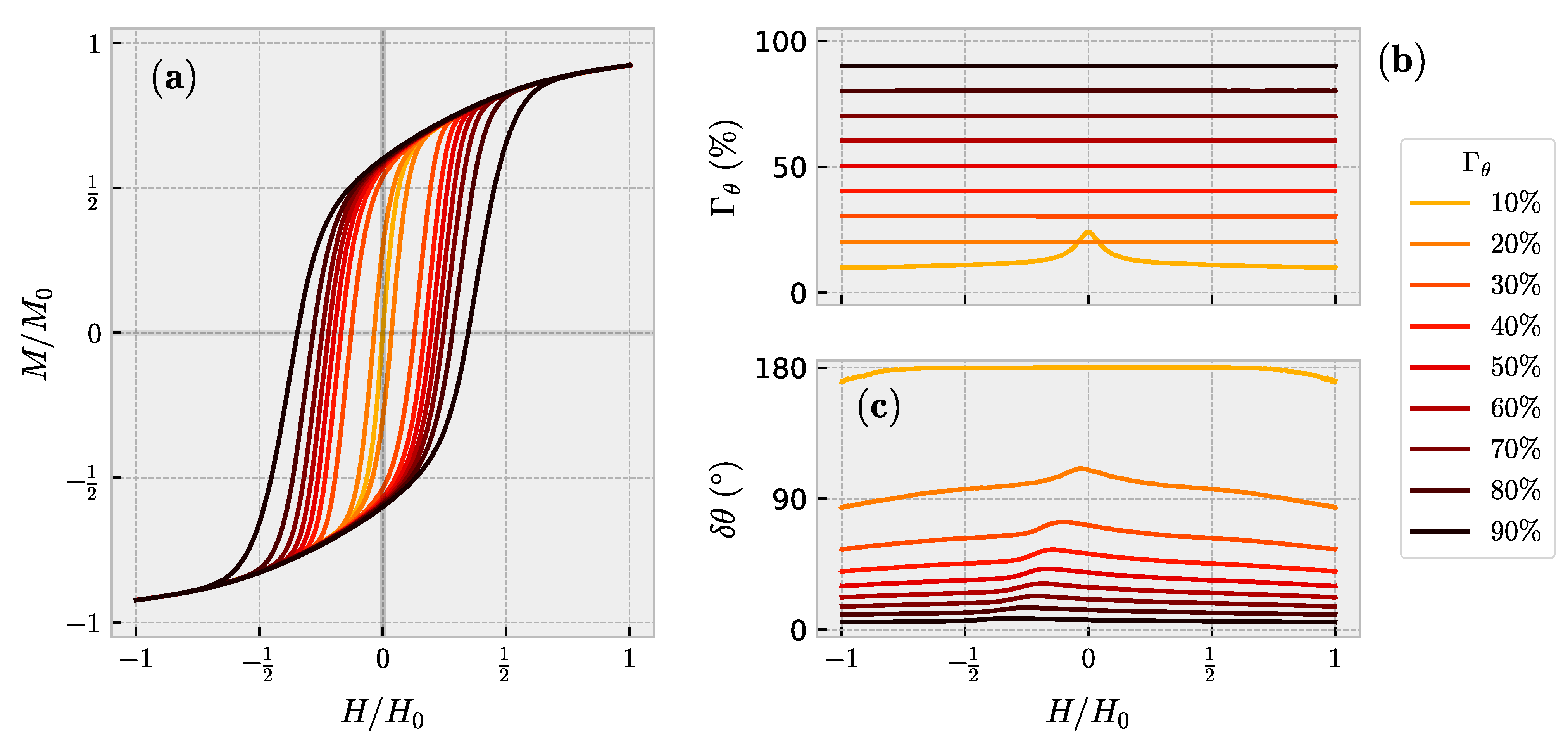
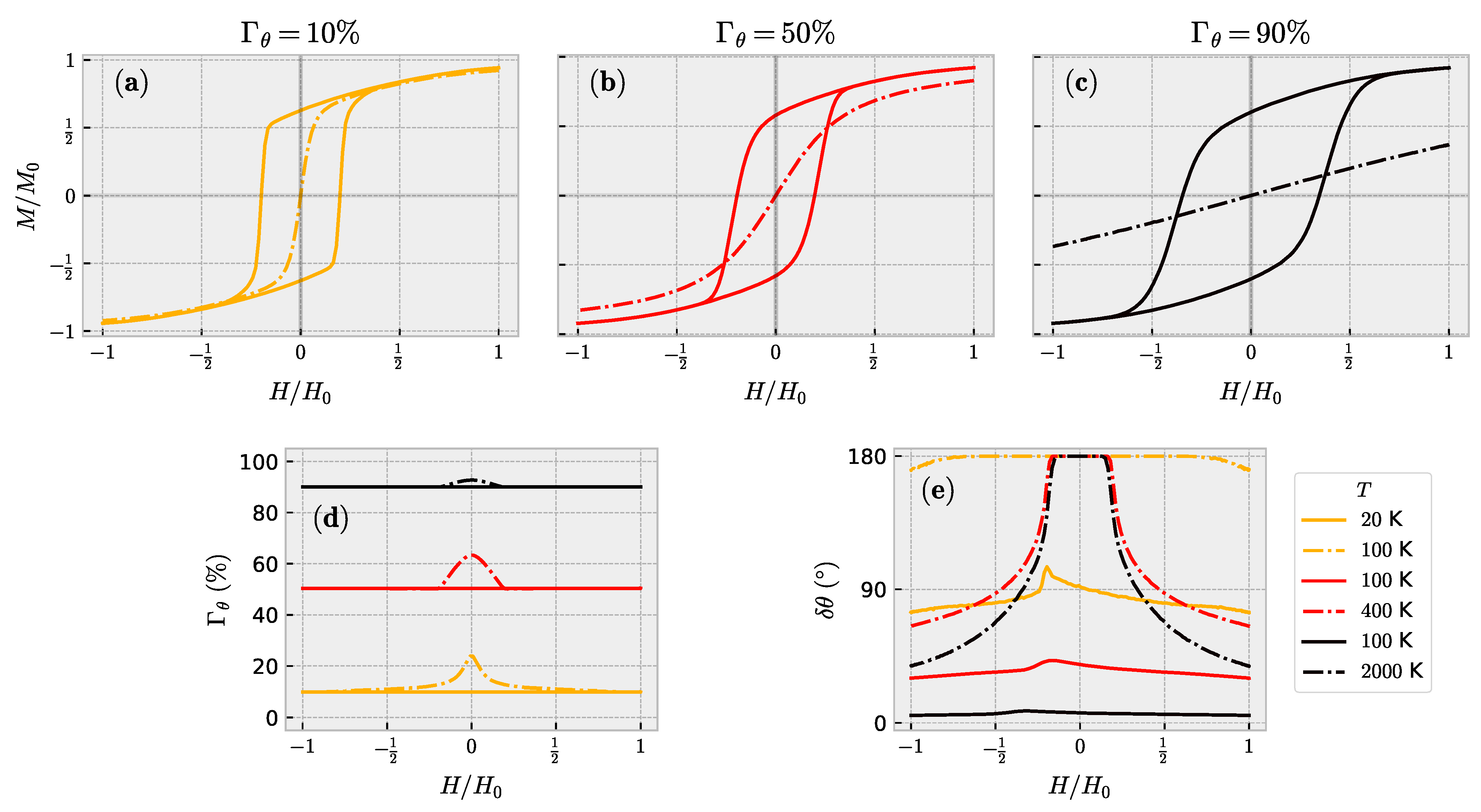
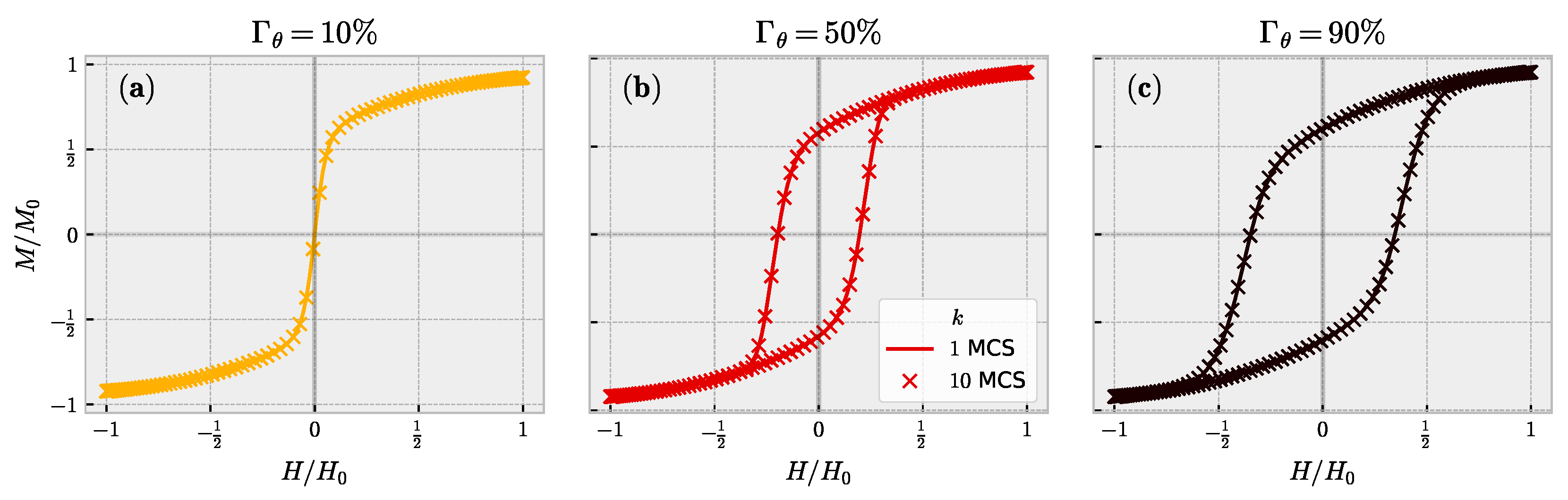
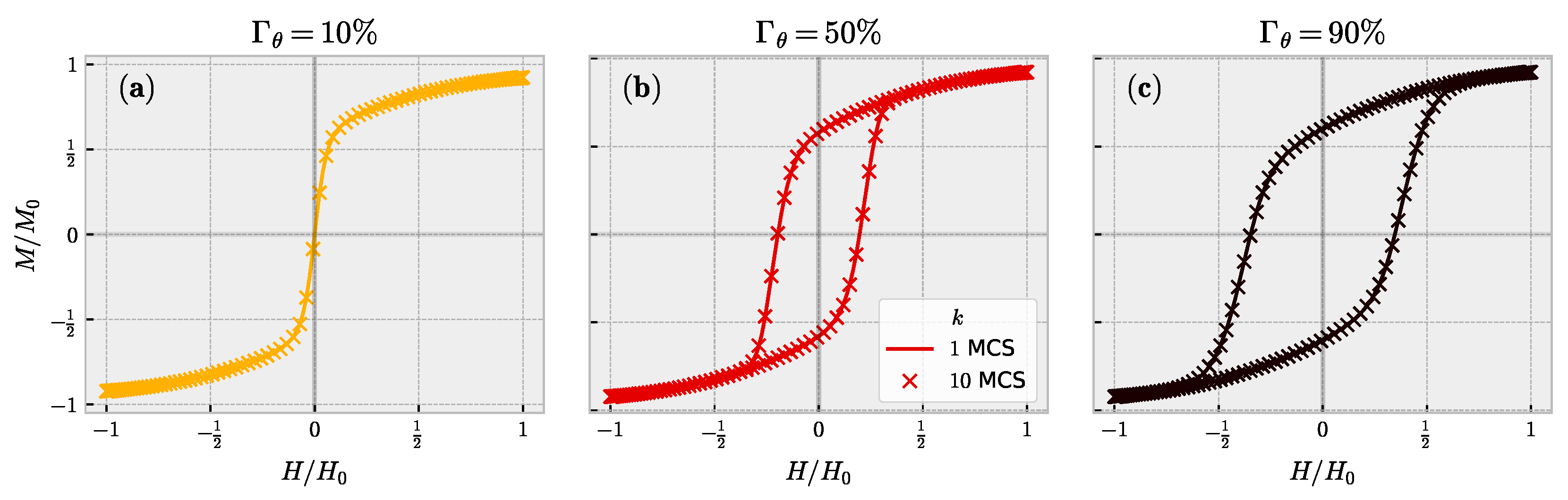
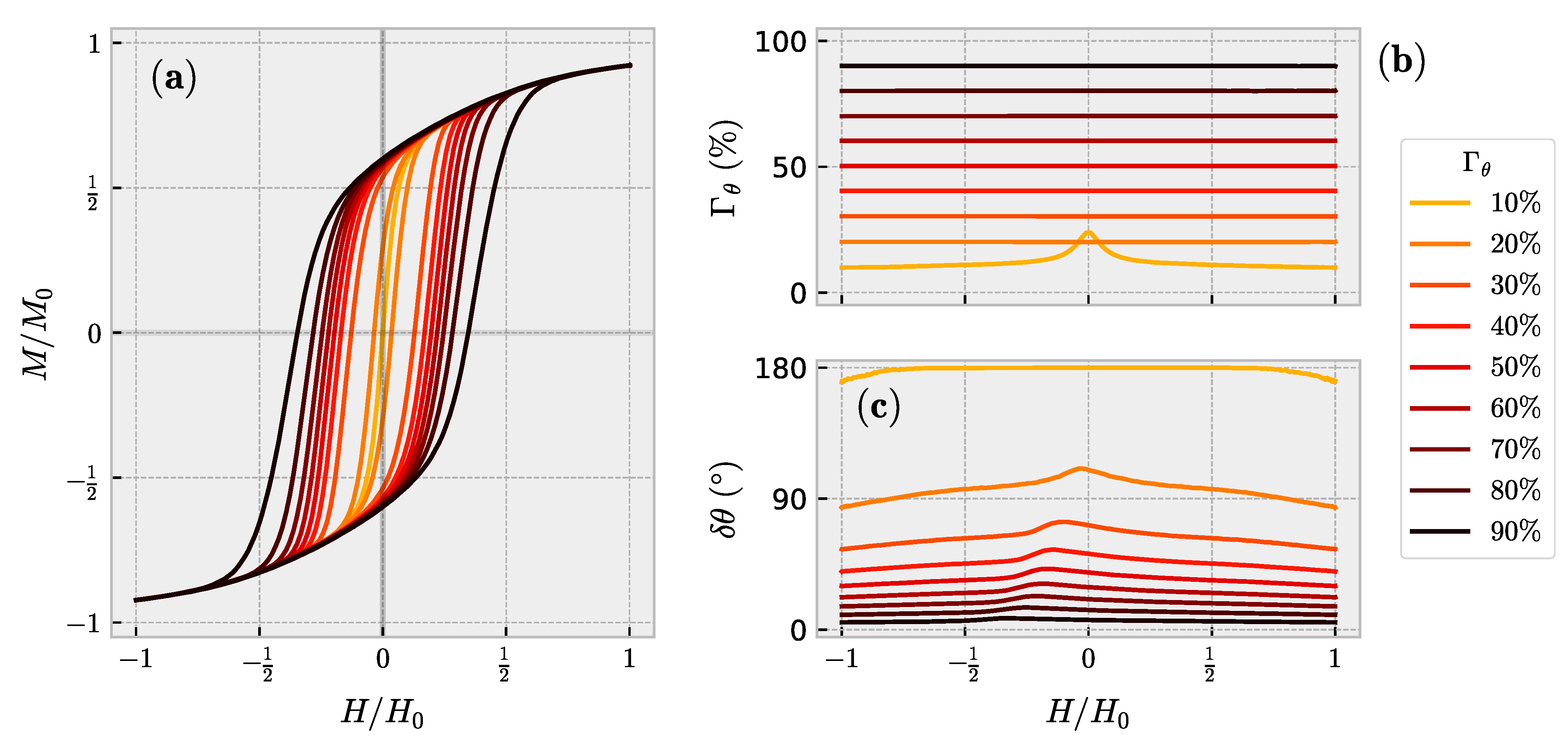
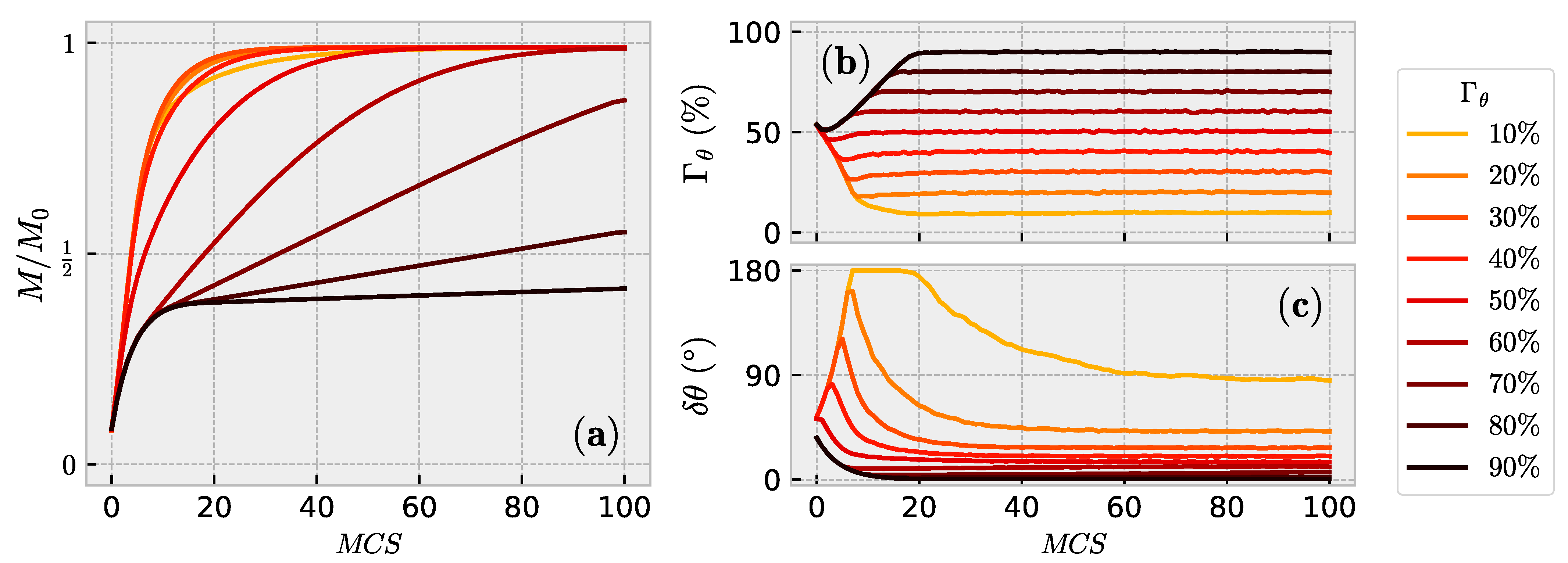
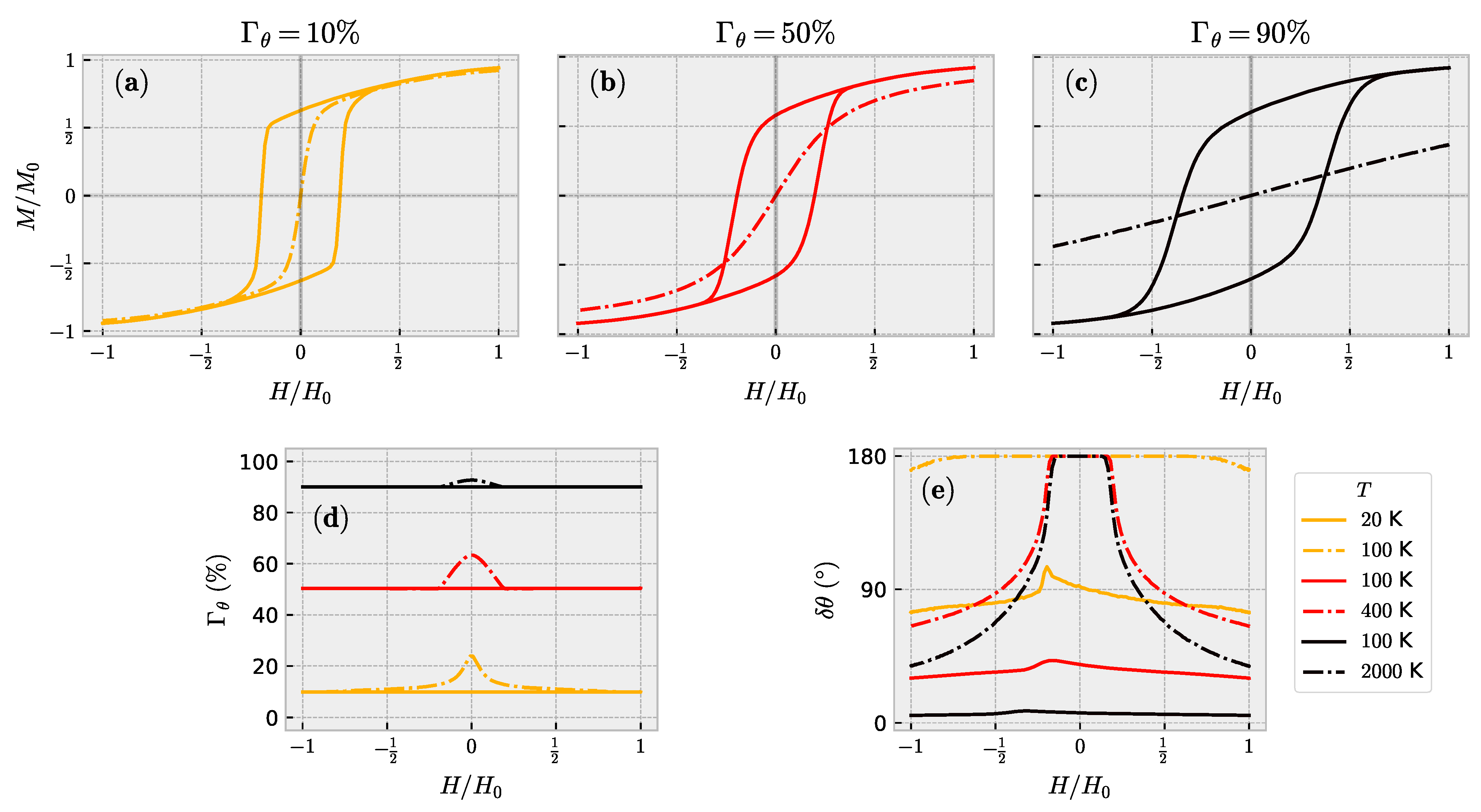
3.1. Magnetization, Acceptance Rate and Cone Aperture vs. Magnetic Field
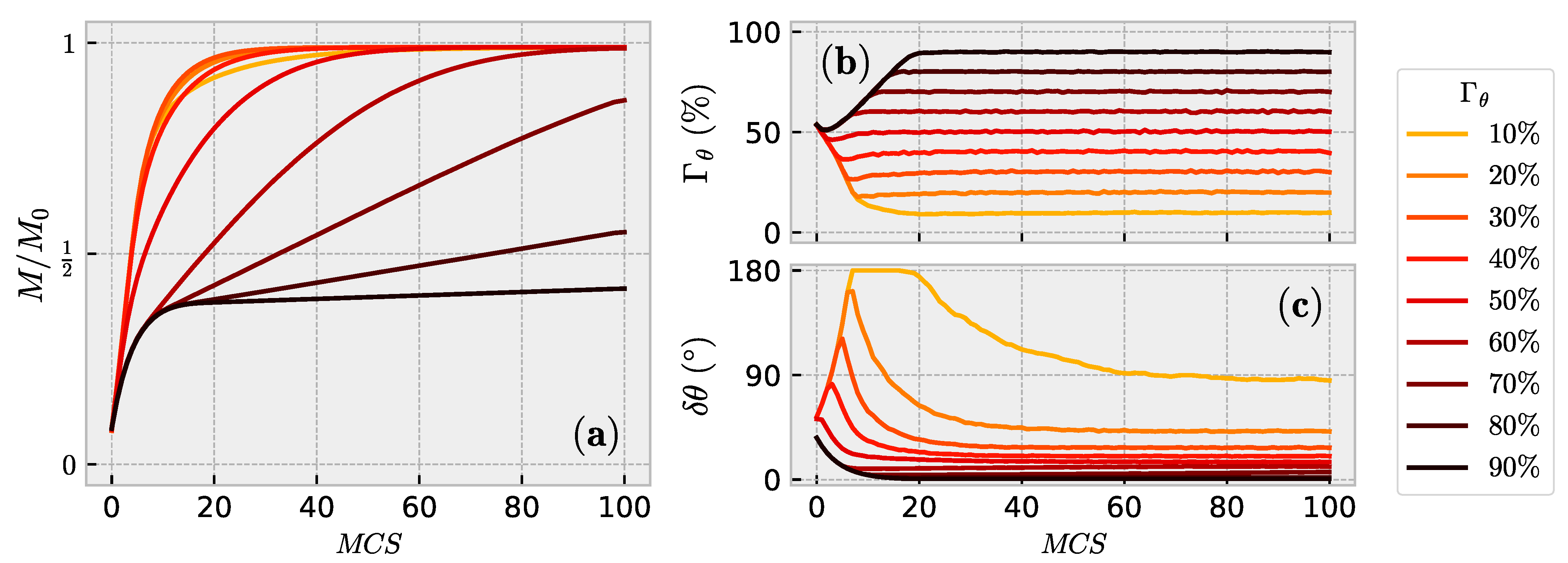
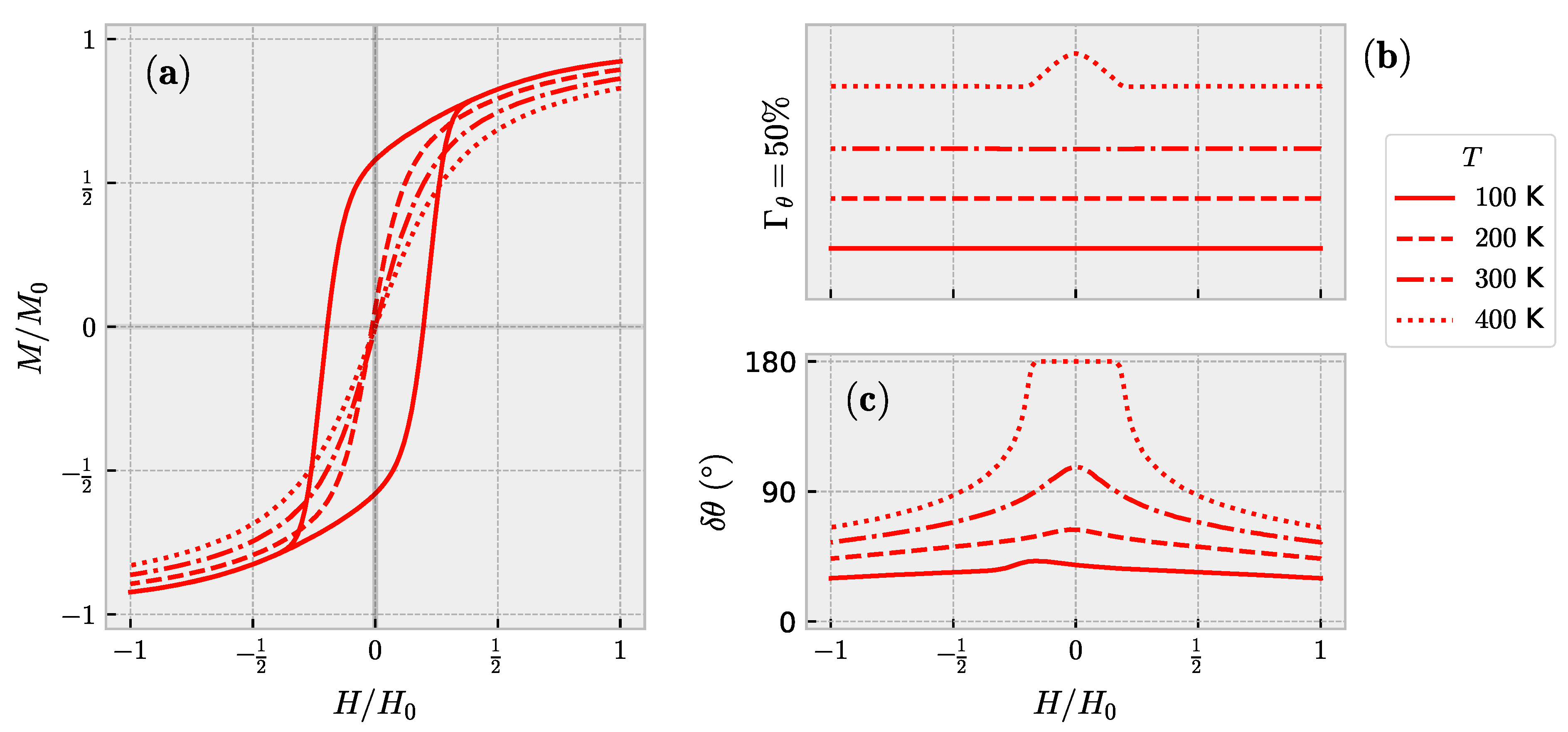
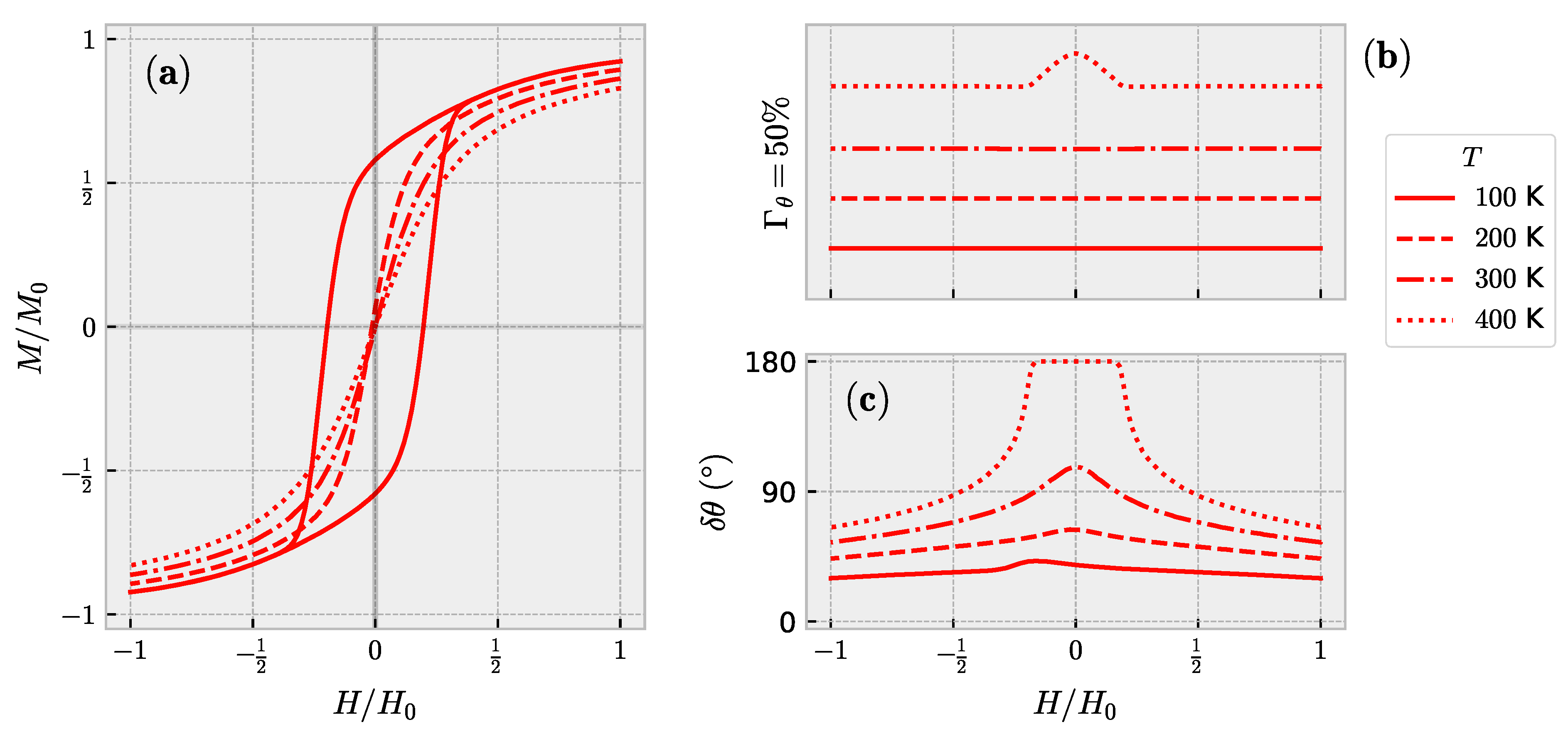
3.2. Superparamagnetic Behavior and Temperature Dependence
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
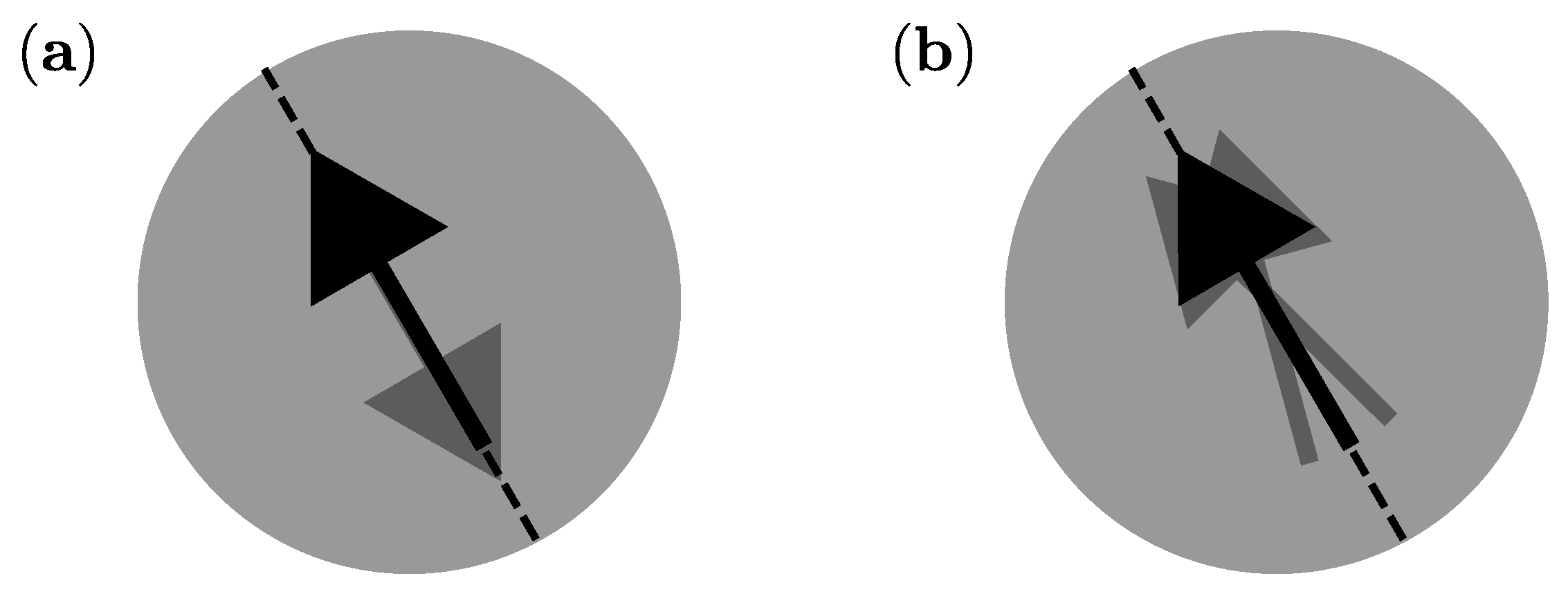
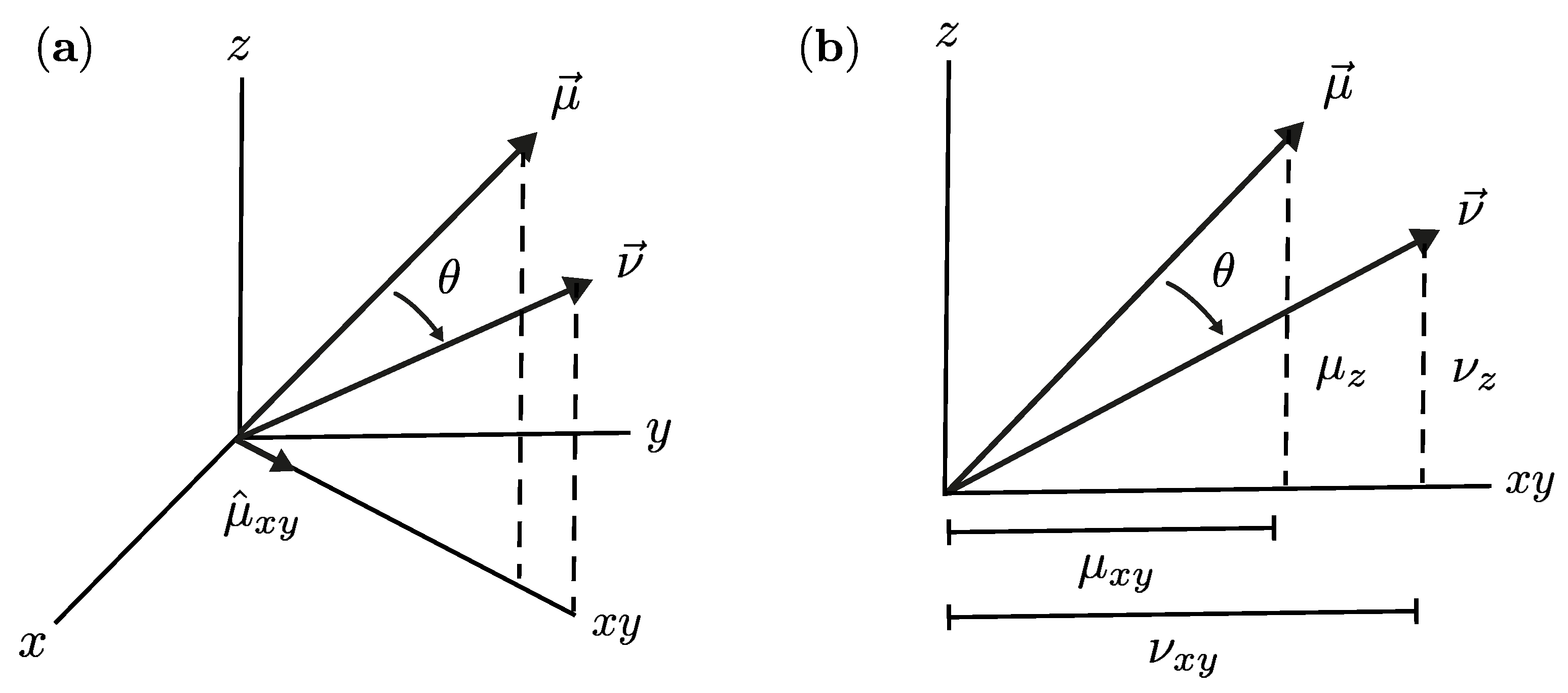
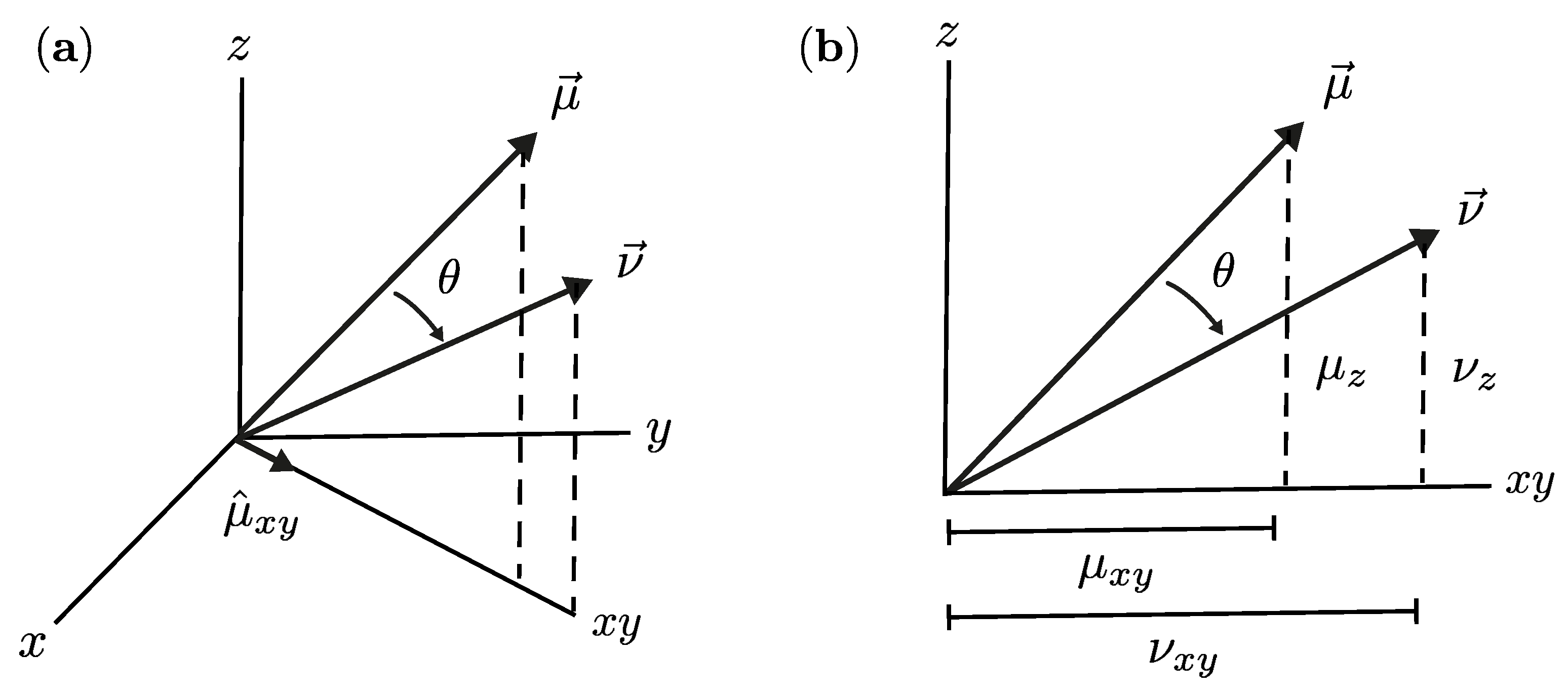
Appendix A.1. Magnetic Moment Rotation
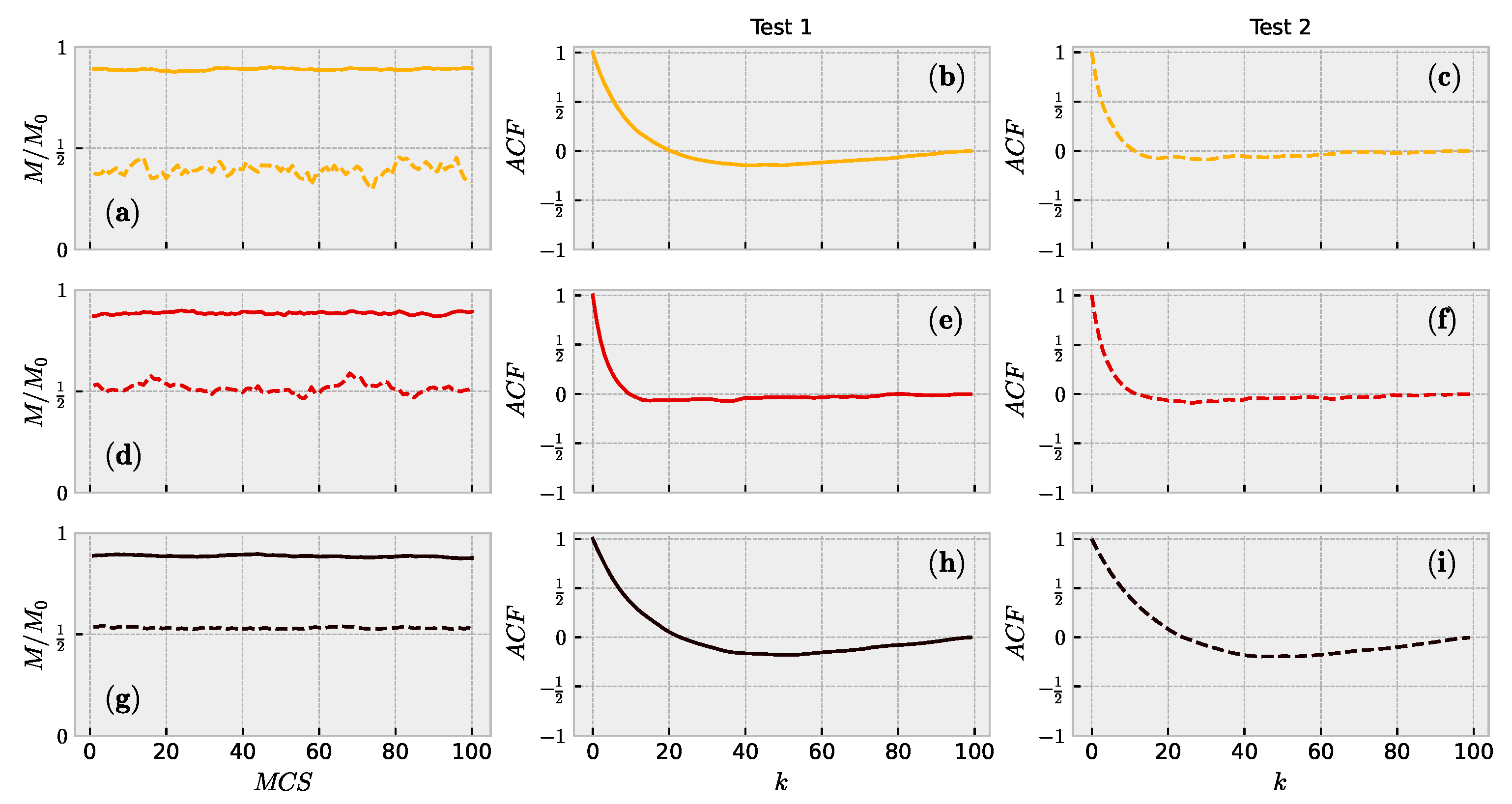
Appendix A.2. Algorithm Testing and Diagnostics

References
- Stoner, E.C.; Wohlfarth, E.P. A mechanism of magnetic hysteresis in heterogeneous alloys. Philos. Trans. R. Soc. London Ser. A. 1948, 240, 599. [Google Scholar] [CrossRef]
- Néel, L. Theorie du trainage magnetique des ferromagnetiques en grains fins avec applications aux terres cuites. Ann Geophys. 1949, 5, 99. [Google Scholar]
- Brown, W.J. Thermal Fluctuations of a Single-Domain Particle. Phys. Rev. 1963, 130, 1677. [Google Scholar] [CrossRef]
- Rümenapp, C.; Gleich, B.; Haase, A. Magnetic nanoparticles in magnetic resonance imaging and diagnostics. Pharm. Res. 2012, 29, 1165–1179. [Google Scholar] [CrossRef]
- Fatima, H.; Charinpanitkul, T.; Kim, K.-S. Fundamentals to Apply Magnetic Nanoparticles for Hyperthermia Therapy. Nanomaterials 2021, 11, 1203. [Google Scholar] [CrossRef] [PubMed]
- Giustini, A.J.; Petryk, A.A.; Cassim, S.M.; Tate, J.A.; Baker, I.; Hoopes, P.J. Magnetic Nanoparticle Hyperthermia in Cancer Treatment. Nano LIFE 2010, 1, 17–32. [Google Scholar] [CrossRef] [PubMed]
- Akbarzadeh, A.; Samiei, M.; Davaran, S. Magnetic nanoparticles: Preparation, physical properties, and applications in biomedicine. Nanoscale Res. Lett. 2012, 7, 144. [Google Scholar] [CrossRef] [Green Version]
- García-Palacios, J.L.; Lázaro, F.J. Langevin-dynamics study of the dynamical properties of small magnetic particles. Phys. Rev. B 1998, 58, 14937. [Google Scholar] [CrossRef] [Green Version]
- Shah, S.A.; Reeves, D.B.; Ferguson, R.M.; Weaver, J.B.; Krishnan, K.M. Mixed Brownian alignment and Néel rotations in superparamagnetic iron oxide nanoparticle suspensions driven by an ac field. Phys. Rev. B 2015, 92, 094438. [Google Scholar] [CrossRef] [Green Version]
- Shasha, C.; Krishnan, K.M. Nonequilibrium dynamics of magnetic nanoparticles with applications in biomedicine. Adv. Mater. 2020, 33, 1904131. [Google Scholar] [CrossRef]
- Tran, N.L.; Tran, H.H. Role of the poly-dispersity and the dipolar interaction in magnetic nanoparticle systems: Monte Carlo study. J. Non-Cryst. Solids 2011, 357, 996–999. [Google Scholar] [CrossRef]
- Schaller, V.; Wahnström, G.; Sanz-Velasco, A.; Enoksson, P.; Johansson, C. Monte Carlo simulation of magnetic multi-core nanoparticle. J. Magn. Magn. Mater. 2009, 321, 1400–1403. [Google Scholar] [CrossRef]
- Khodadadian, A.; Noii, N.; Parvizi, M.; Abbaszadeh, M.; Wick, T.; Heitzinger, C. A Bayesian estimation method for variational phase-field fracture problems. Comput. Mech. 2020, 66, 827–849. [Google Scholar] [CrossRef] [PubMed]
- Mirsiand, S.; Khodadadiana, A.; Hedayatid, A.; Manzour-ol-Ajdadd, A.; Kalantarinejadd, R.; Heitzingera, C. A new method for selective functionalization of silicon nanowire sensors and Bayesian inversion for its parameters. Biosens. Bioelectron. 2019, 142, 111527. [Google Scholar] [CrossRef] [PubMed]
- Khodadadian, A.; Stadlbauer, B.; Heitzinger, C. Bayesian inversion for nanowire field-effect sensors. J. Comput. Electron. 2020, 19, 147–159. [Google Scholar] [CrossRef] [Green Version]
- Minson, S.E.; Simons, M.; Beck, J.L. Bayesian inversion for finite fault earthquake source models I—Theory and algorithm. Geophys. J. Int. 2013, 194, 1701–1726. [Google Scholar] [CrossRef] [Green Version]
- Cardiff, M.; Kitanidis, P.K. Bayesian inversion for facies detection: An extensible level set framework. Water Resour. Res. 2009, 45, W10416. [Google Scholar] [CrossRef]
- Melenev, P.V.; Raikher, Y.L.; Rusakov, V.V.; Perzynski, R. Time quantification for Monte Carlo modeling of superparamag-netic relaxation. Phys. Rev. B 2012, 86, 104423. [Google Scholar] [CrossRef]
- Dimitrov, D.A.; Wysin, G.M. Magnetic properties of superparamagnetic particles by a Monte Carlo method. Phys. Rev. B 1996, 54, 9237. [Google Scholar] [CrossRef] [Green Version]
- Dieckhoff, J.; Eberbeck, D.; Schilling, M.; Ludwig, F. Magnetic-field dependence of Brownian and Néel relaxation times. J. Appl. Phys. 2016, 119, 043903. [Google Scholar] [CrossRef]
- Omelyanchik, A.; Salvador, M.; D’Orazio, F.; Mameli, V.; Cannas, C.; Fiorani, D.; Musinu, A.; Rivas, M.; Rodionova, V.; Varvaro, G.; et al. Magnetocrystalline and Surface Anisotropy in CoFe2O4 Nanoparticles. Nanomaterials 2020, 10, 1288. [Google Scholar] [CrossRef] [PubMed]
- Binder, K.; Heermann, D.W. Monte Carlo Simulation in Statistical Physics. An Introduction, 5th ed.; Springer: Berlin, Germany, 2010; pp. 5–19. [Google Scholar]
- Stuart, A.M. Inverse problems: A Bayesian perspective. Acta Numer. 2010, 19, 451–559. [Google Scholar] [CrossRef] [Green Version]
- Rosensweig, R.E. Heating magnetic fluid with alternating magnetic field. J. Magn. Magn. Mater. 2002, 252, 370–374. [Google Scholar] [CrossRef]
- Link, W.A.; Eaton, M.J. On thinning of chains in MCMC. Br. Ecol. Soc. 2012, 3, 112–115. [Google Scholar] [CrossRef]
- Gatsonis, C.; Carriquiry, A.; Kass, R.E.; Gelman, A.; Higdon, D.; Pauler, D.K.; Verdinelli, I. Case Studies in Bayesian Statistics, 1st ed.; Springer: New York, NY, USA, 2002; Volume 6, pp. 214–215. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zapata, J.C.; Restrepo, J. Self-Adaptive Acceptance Rate-Driven Markov Chain Monte Carlo Method Applied to the Study of Magnetic Nanoparticles. Computation 2021, 9, 124. https://doi.org/10.3390/computation9110124
Zapata JC, Restrepo J. Self-Adaptive Acceptance Rate-Driven Markov Chain Monte Carlo Method Applied to the Study of Magnetic Nanoparticles. Computation. 2021; 9(11):124. https://doi.org/10.3390/computation9110124
Chicago/Turabian StyleZapata, Juan Camilo, and Johans Restrepo. 2021. "Self-Adaptive Acceptance Rate-Driven Markov Chain Monte Carlo Method Applied to the Study of Magnetic Nanoparticles" Computation 9, no. 11: 124. https://doi.org/10.3390/computation9110124
APA StyleZapata, J. C., & Restrepo, J. (2021). Self-Adaptive Acceptance Rate-Driven Markov Chain Monte Carlo Method Applied to the Study of Magnetic Nanoparticles. Computation, 9(11), 124. https://doi.org/10.3390/computation9110124