A Discrete Approach to Meshless Lagrangian Solid Modeling

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Mechanics
3. Algorithm
4. Study
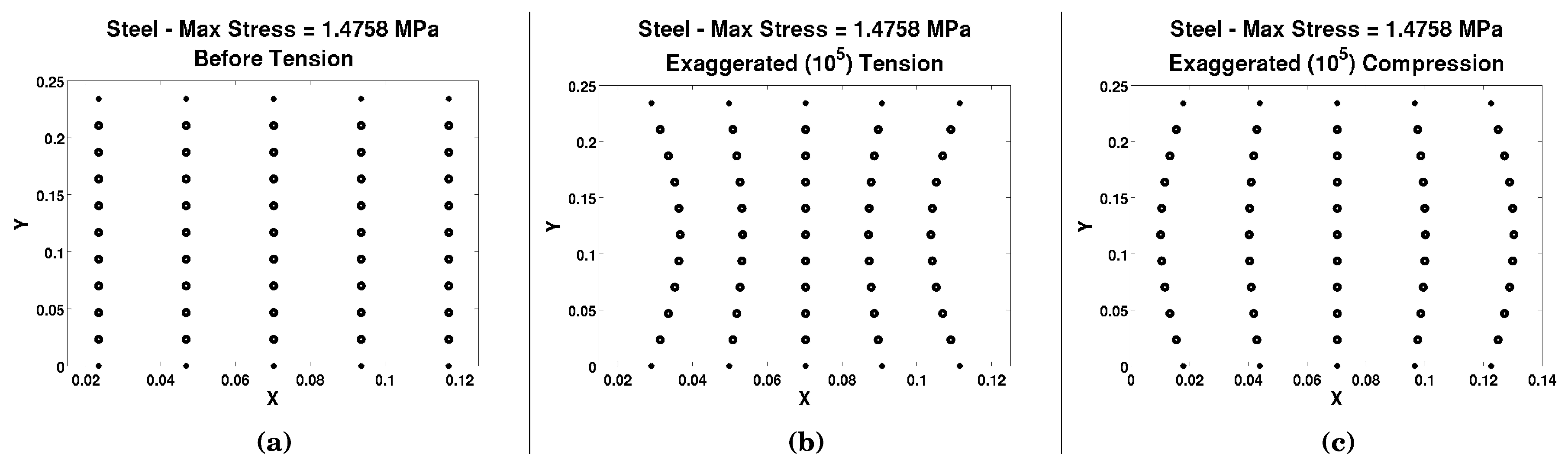
4.1. Tension and Compression
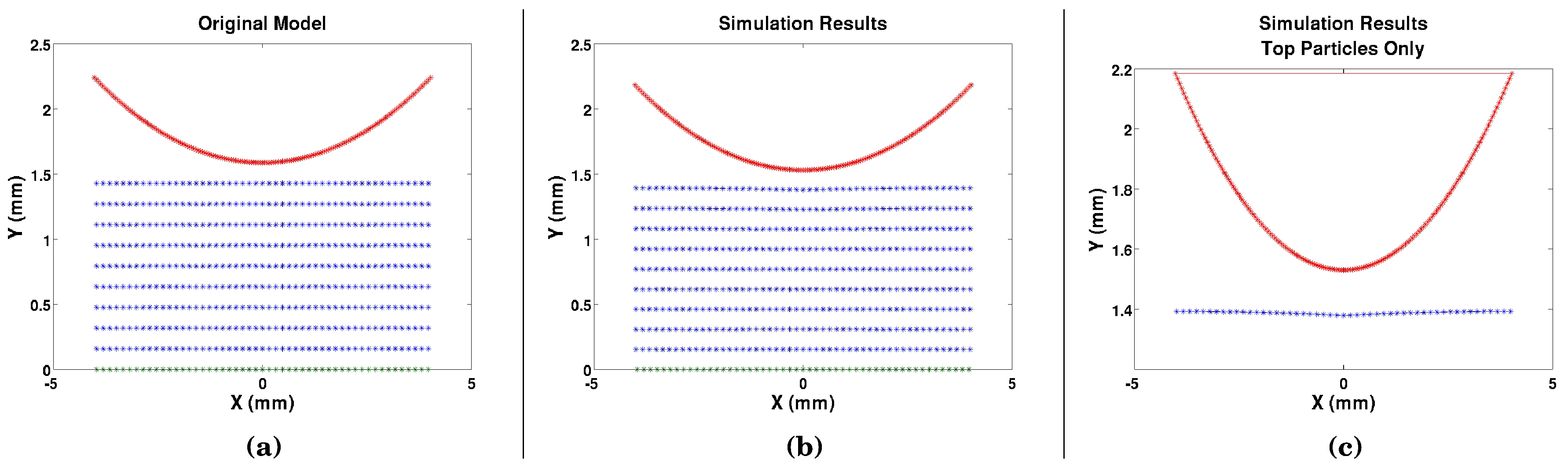
4.2. Shear
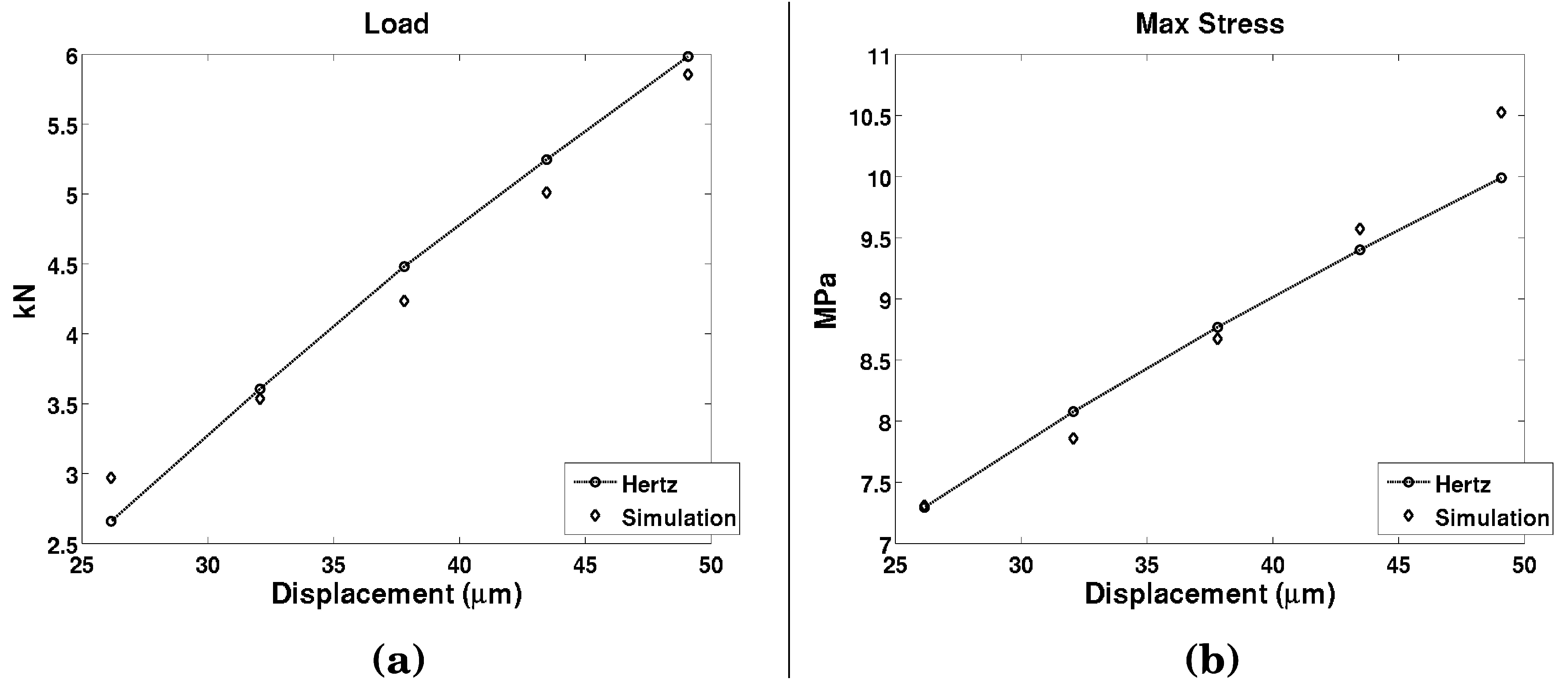
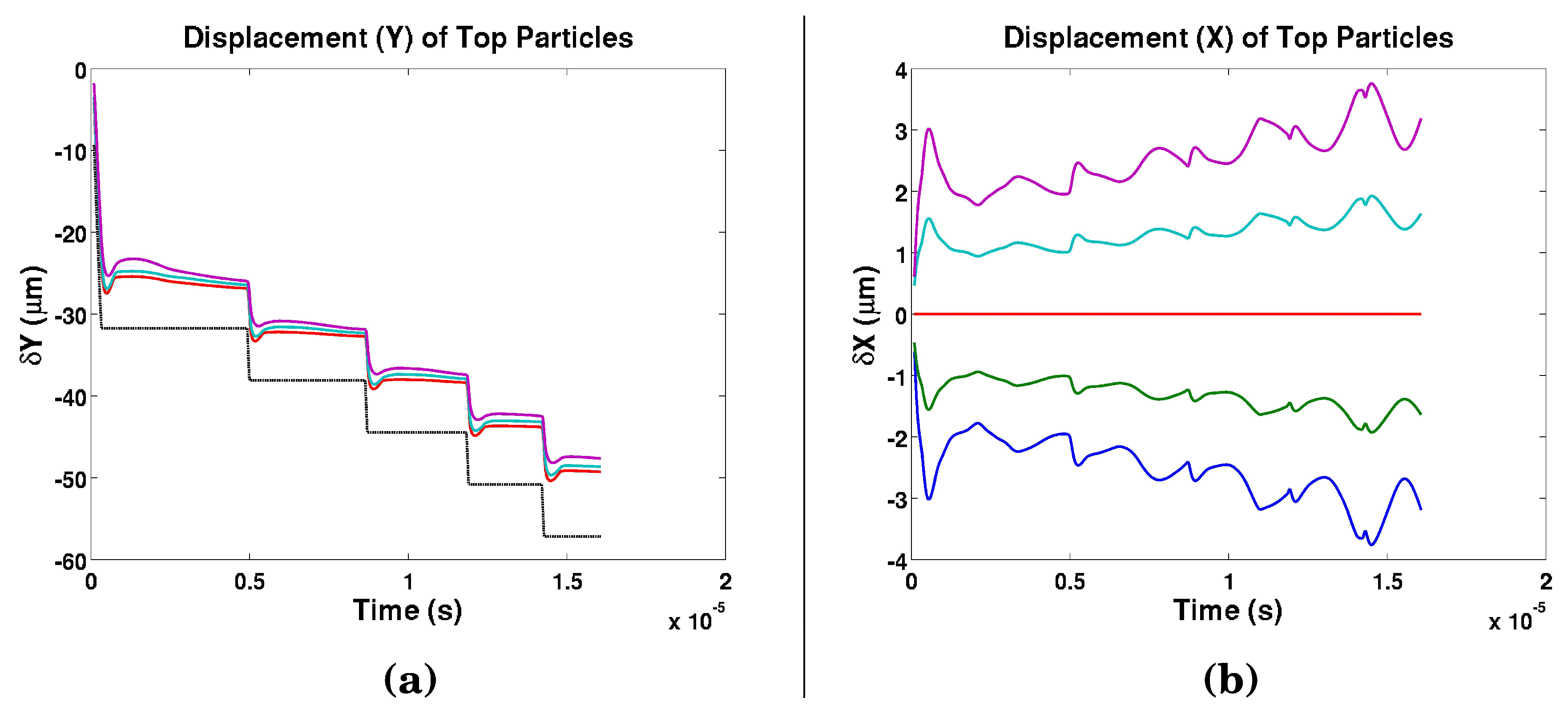
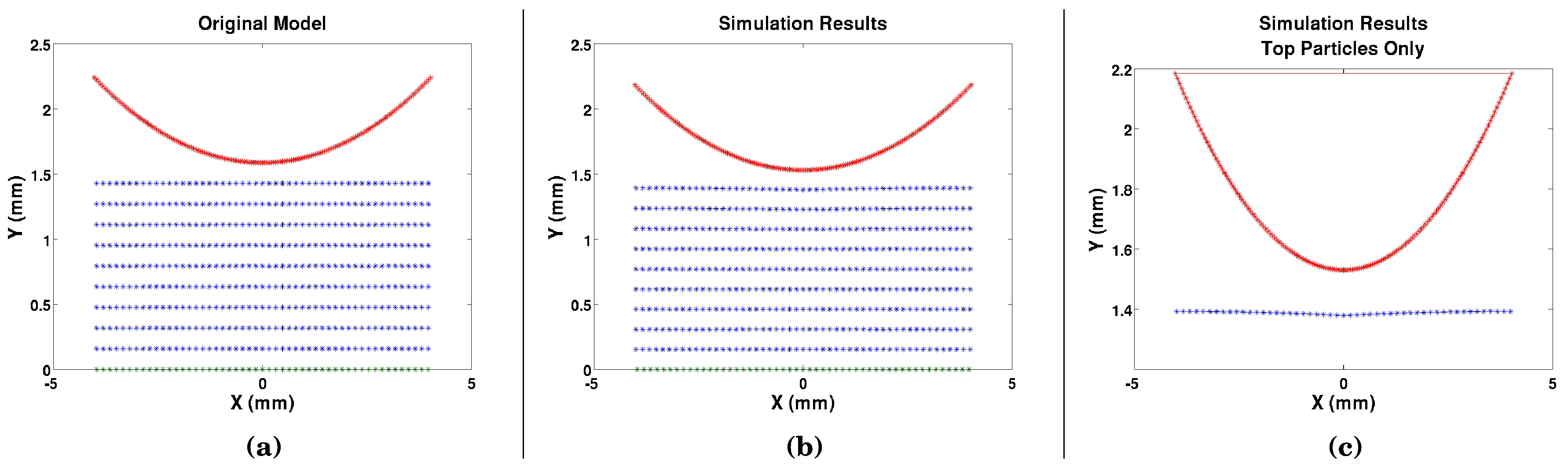
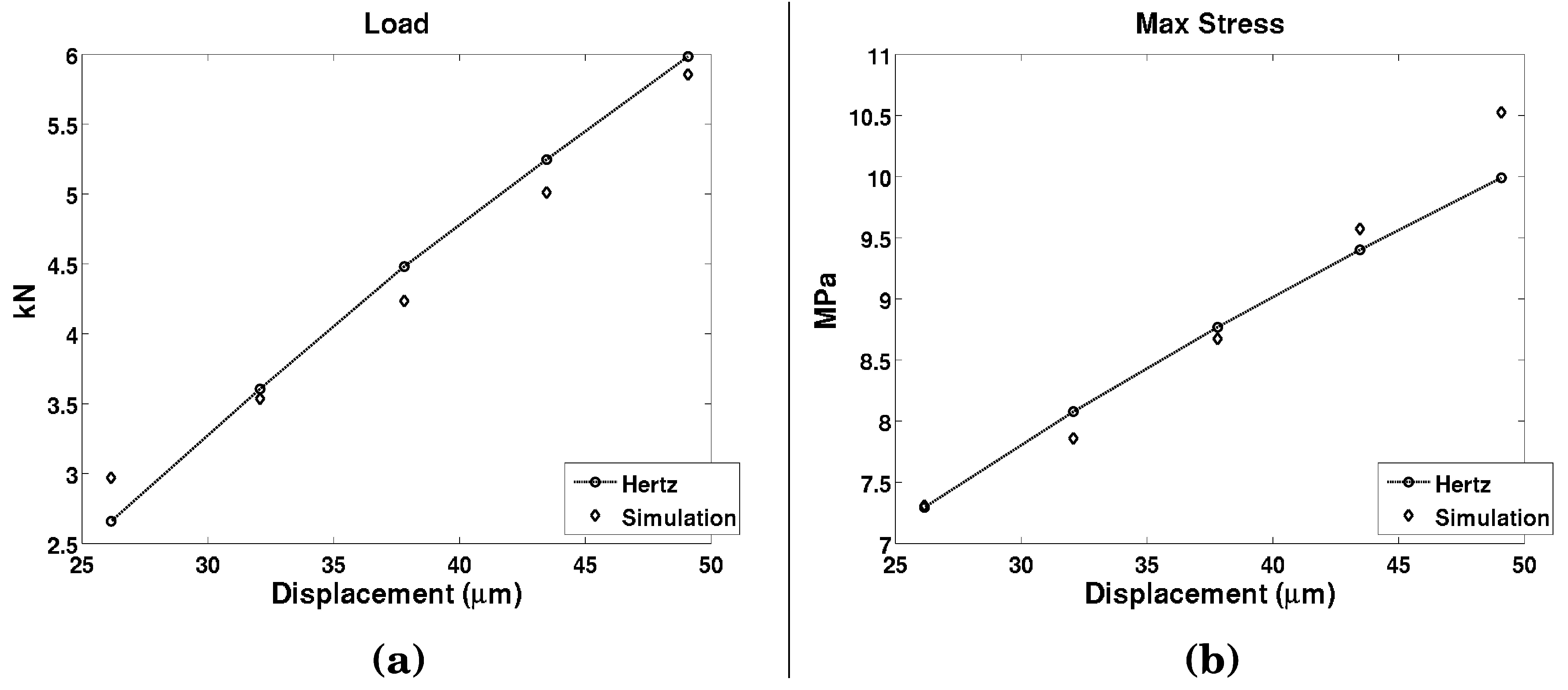
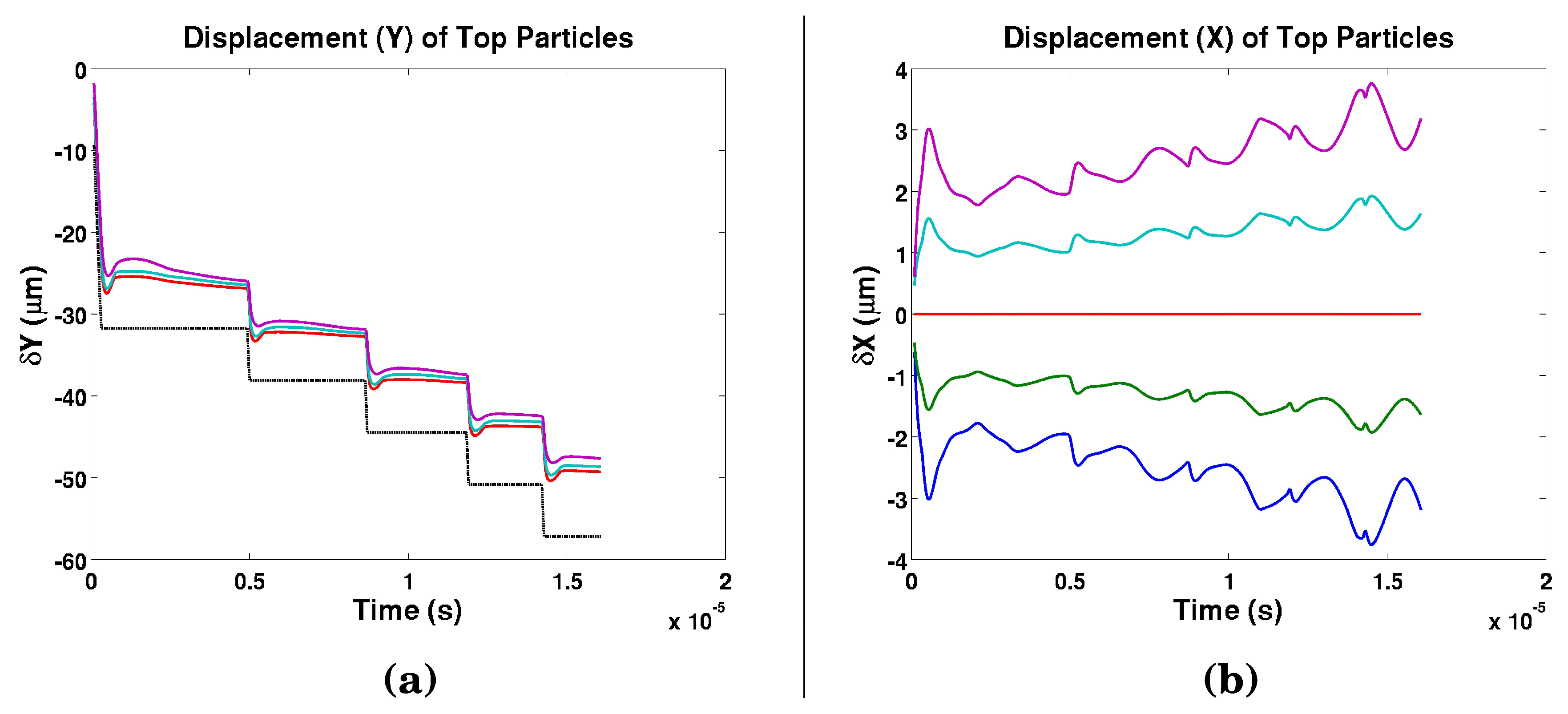
4.3. Hertz Contact Simulation
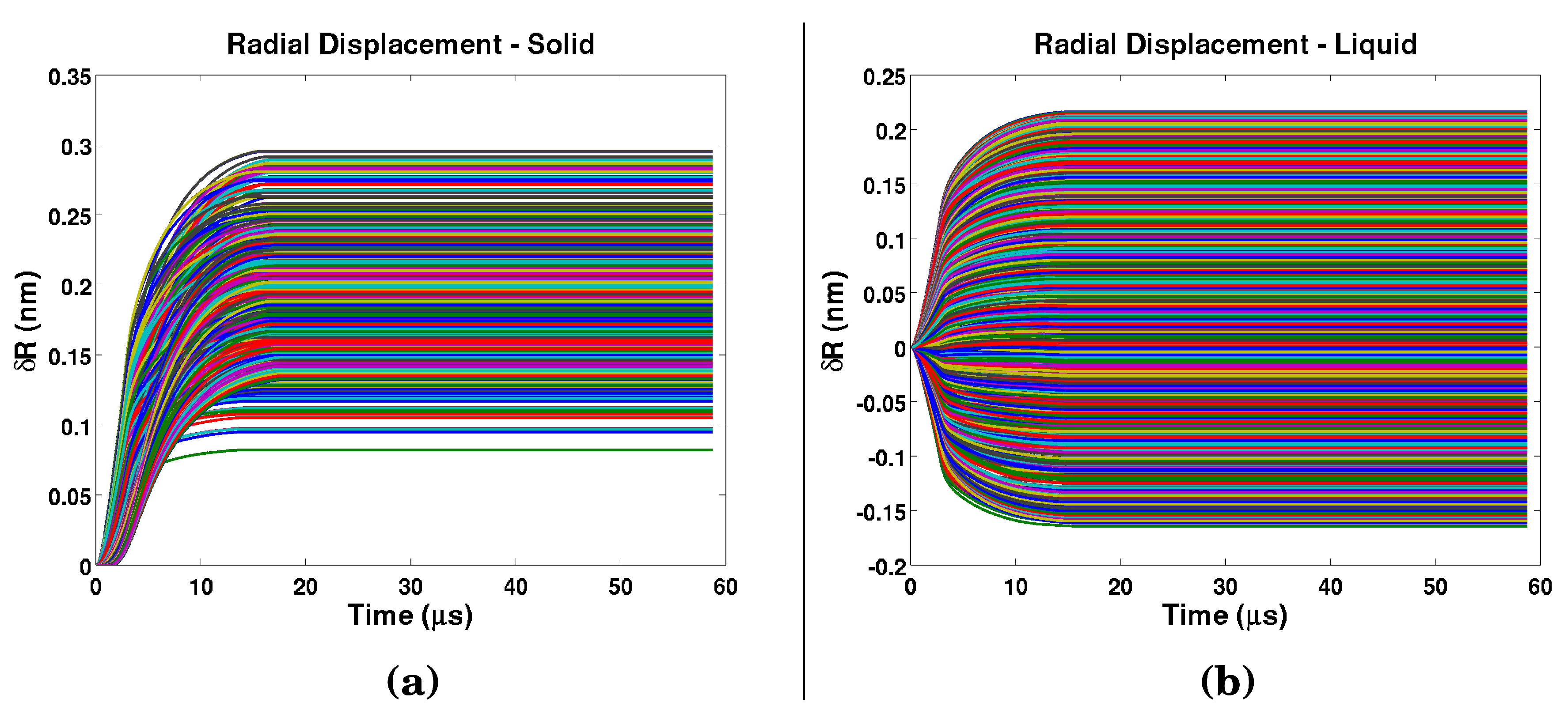
4.4. Pressure Vessel
5. Conclusions
Supplementary Materials
Acknowledgments
Conflicts of Interest
Abbreviations
| FEA | finite element analysis |
| CFD | computational fluid mechanics |
| SPH | smoothed particle hydrodynamics |
| SPAM | smoothed particle applied mechanics |
| FSI | fluid–solid interactions |
| DMP | discrete multi-hybrid physics |
References
- Garcia, A. Numerical Methods for Physics, 2nd ed.; Addison-Wesley: Boston, MA, USA, 1999. [Google Scholar]
- Arfken, G.B.; Weber, H.J. Mathematical Methods for Physicists, 6th ed.; Elsevier: Burlington, MA, USA, 2005. [Google Scholar]
- Zill, D.G.; Cullen, M.R. Advanced Engineering Mathematics, 2nd ed.; Jones and Bartlett Publishers: Sudbury, MA, USA, 2000. [Google Scholar]
- Strang, G. Linear Algebra and Its Applications, 3rd ed.; Thomas Learning Inc.: Horsham, PA, USA, 1988. [Google Scholar]
- Birmingham, E.; Grogan, J.A.; Niebur, G.L.; McNamara, L.M.; McHugh, P.E. Computational modelling of the mechanics of trabecular bone and marrow using fluid structure interaction techniques. Ann. Biomed. Eng. 2013, 41, 814–826. [Google Scholar] [CrossRef] [PubMed]
- Kojić, N.; Milošević, M.; Petrović, D.; Isailović, V.; Sarioglu, A.F.; Haber, D.A.; Kojić, M.; Toner, M. A computational study of circulating large tumor cells traversing microvessels. Comput. Biol. Med. 2015, 63, 187–195. [Google Scholar] [CrossRef] [PubMed]
- Dalrymple, R.; Rogers, B. Numerical modeling of water waves with the SPH method. Coast. Eng. 2006, 53, 141–147. [Google Scholar] [CrossRef]
- Altomare, C.; Dominguez, J.M.; Crespo, A.J.C.; Suzuki, T.; Caceres, I.; Gomez-Gesteira, M. Hybridization of the wave propagation model swash and the meshfree particle method SPH for real coastal applications. Coast. Eng. J. 2015, 57, 1550024–1550034. [Google Scholar] [CrossRef]
- Tafuni, A.; Sahin, I.; Hyman, M. Numerical investigation of wave elevation and bottom pressure generated by a planing hull in finite-depth water. Appl. Ocean Res. 2016, 58, 281–291. [Google Scholar] [CrossRef]
- Currie, I.G. Fundamental Mechanics of Fluids, 3rd ed.; Marcel Dekker Inc.: New York, NY, USA, 2003. [Google Scholar]
- Lai, W.; Rubin, D.; Krempl, E. Introduction to Continuum Mechanics, 4th ed.; Butterworth-Heinemann of Elsevier: Burlington, MA, USA, 2010. [Google Scholar]
- Timoshenko, S.; Goodier, J. Theory of Elasticity, 3rd ed.; McGraw Hill: New York, NY, USA, 1970. [Google Scholar]
- Riley, W.F.; Sturges, L.D.; Morris, D.H. Statics and Mechanics of Solids, 2nd ed.; John Wiley and Sons: Hoboken, NJ, USA, 2002. [Google Scholar]
- Stroustrup, B. The C++ Programming Language, 3rd ed.; Addison-Wesley Professional: Boston, MA, USA, 2000. [Google Scholar]
- Chen, S.; Gordon, D. Front-to-back display of bsp trees. IEEE Comput. Graphic. Appl. 1991, 11, 79–85. [Google Scholar]
- Liu, G.R.; Liu, M.B. Smoothed Particle Hydrodynamics: A Meshfree Partical Method; World Scientific Publishing Co.: Hackensack, NJ, USA, 2003. [Google Scholar]
- Kyle, J.P.; Terrell, E.J. Application of smoothed particle hydrodynamics to full-film lubrication. J. Tribol. 2013, 135, 041705. [Google Scholar] [CrossRef]
- Monaghan, J.J. Why particle methods work. SIAM J. Sci. Stat. Comput. 1982, 3, 422–433. [Google Scholar] [CrossRef]
- Libersky, L.D. High strain lagrangian hydrodynamics: A three-dimensional SPH code for dynamic material response. J. Comput. Phys. 1993, 109, 67–75. [Google Scholar] [CrossRef]
- Lucy, L. A numerical approach to the testing of the fission hypothesis. Astron. J. 1977, 82, 1013–1024. [Google Scholar] [CrossRef]
- White, F. Fluid Mechanics, 5th ed.; McGraw-Hill: Boston, MA, USA, 2003. [Google Scholar]
- Jones, J.E. On the determination of molecular fields. Proc. R. Soc. Lond. A 1924, 106, 463–477. [Google Scholar] [CrossRef]
- Hoover, W.G. Smooth Particle Applied Mechanics: The State of the Art; World Scientific Publishing Co.: Hackensack, NJ, USA, 2006. [Google Scholar]
- Hoover, W.G.; Pierce, T.G.; Hoover, C.G.; Shugart, J.O.; Stein, C.M.; Edwards, A.L. Molecular dynamics, smoothed-particle applied mechanics, and irreversibility. Comput. Math. Appl. 1994, 28, 155–174. [Google Scholar] [CrossRef]
- Batra, R.C.; Zhang, G.M. Modified Smoothed Particle Hydrodynamics (MSPH) basis functions for meshless methods, and their application to axisymmetric Taylor impact test. J. Comput. Phys. 2008, 227, 1962–1981. [Google Scholar] [CrossRef]
- Antoci, C.; Gallati, M.; Sibilla, S. Numerical simulation of fluid–structure interaction by SPH. Comput. Struct. 2007, 85, 879–890. [Google Scholar] [CrossRef]
- Pathria, R.K. Statistical Mechanics, 2nd ed.; Butterworth-Heinemann: Burlington, MA, USA, 1972. [Google Scholar]
- Balsara, D.S. Von Neumann stability analysis of smoothed particle hydrodynamics-suggestions for optimal algorithms. J. Comput. Phys. 1995, 121, 357–372. [Google Scholar] [CrossRef]
- Dyka, C.T.; Ingel, R.P. An approach for tension instability in smoothed particle hydrodynamics (SPH). Comput. Struct. 1995, 57, 573–580. [Google Scholar] [CrossRef]
- Dyka, C.T.; Randles, P.W.; Ingel, R.P. Stress points for tension instability in Smoothed Particle Hydrodynamics. Int. J. Numer. Meth. Eng. 1997, 40, 2325–2341. [Google Scholar] [CrossRef]
- Swegle, J.W.; Attaway, S.W. On the feasibility of using smoothed particle hydrodynamics for underwater explosion calculations. Comput. Mech. 1995, 17, 151–168. [Google Scholar] [CrossRef]
- Swegle, J.W.; Hicks, D.L.; Attaway, S.W. Smoothed Particle Hydrodynamics stability analysis. J. Comput. Phys. 2002, 116, 123–134. [Google Scholar] [CrossRef]
- Wu, K.; Yang, D.; Wrightb, N. A coupled SPH-DEM model for fluid-structure interaction problems with free-surface flow and structural failure. Comput. Struct. 2016, 177, 141–161. [Google Scholar] [CrossRef]
- Stasch, J.; Avci, B.; Wriggers, P. Numerical simulation of fluid-structure interaction problems by a coupled SPH-FEM approach. Proc. Appl. Math. Mech. 2016, 16, 491–492. [Google Scholar] [CrossRef]
- Bajd, F.; Serša, I. Mathematical modeling of blood clot fragmentation during flow-mediated thrombolysis. Biophys. J. 2013, 104, 1181–1190. [Google Scholar] [CrossRef] [PubMed]
- Alexiadis, A.; Stamatopoulos, K.; Wen, W.; Batchelor, H.; Bakalis, S.; Barigou, M.; Simmons, M. Using discrete multi-physics for detailed exploration of hydrodynamics in an in vitro colon system. Comput. Biol. Med. 2017, 81, 188–198. [Google Scholar] [CrossRef] [PubMed]
- Ariane, M.; Allouche, M.H.; Bussone, M.; Giacosa, F.; Bernard, F.; Barigou, M.; Alexiadis, A. Discrete multi-physics: A mesh-free model of blood flow in flexible biological valve including solid aggregate formation. PLoS ONE 2017, 12, e0174795. [Google Scholar] [CrossRef] [PubMed]
- Alexiadis, A. The discrete multi-hybrid system for the simulation of solid-liquid flows. PLoS ONE 2015, 10, e0124678. [Google Scholar] [CrossRef] [PubMed]
- Sinnott, M.; Cleary, P.; Arkwright, J.; Dinning, P. Investigating the relationships between peristaltic contraction and fluid transport in the human colon using Smoothed Particle Hydrodynamics. Comput. Biol. Med. 2012, 42, 492–503. [Google Scholar] [CrossRef] [PubMed]
- Callister, W.D. Materials Science and Engineering: An Introduction, 6th ed.; John Wiley and Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Hiermaier, S.; Konke, D.; Stilp, A.J.; Thomas, K. Computational simulation of the hypervelocity impact of Al-sphere on thin plates of different materials. Int. J. Impact Eng. 1997, 20, 363–374. [Google Scholar] [CrossRef]
- Johnson, K. Contact Mechanics; Cambridge University Press: New York, NY, USA, 1987. [Google Scholar]
- Gohar, R. Elastohydrodynamics, 2nd ed.; World Scientific Publishing Co.: Bergen, NJ, USA, 2001. [Google Scholar]
- Stachowiak, G.; Batchelor, A. Engineering Tribology, 4th ed.; Butterworth-Heinemann: Oxford, UK, 2005. [Google Scholar]


© 2017 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marko, M. A Discrete Approach to Meshless Lagrangian Solid Modeling. Computation 2017, 5, 33. https://doi.org/10.3390/computation5030033
Marko M. A Discrete Approach to Meshless Lagrangian Solid Modeling. Computation. 2017; 5(3):33. https://doi.org/10.3390/computation5030033
Chicago/Turabian StyleMarko, Matthew. 2017. "A Discrete Approach to Meshless Lagrangian Solid Modeling" Computation 5, no. 3: 33. https://doi.org/10.3390/computation5030033
APA StyleMarko, M. (2017). A Discrete Approach to Meshless Lagrangian Solid Modeling. Computation, 5(3), 33. https://doi.org/10.3390/computation5030033