1. Introduction
Following the current trends in the development of avionics, onboard computer networks (OCN) are multicomputer systems integrated within a single system. Integration makes it possible to improve the performance almost indefinitely by introducing additional computing modules [
1,
2,
3,
4]. The possibilities provided by the integration can be fully implemented, when the following requirements for the organisation of the OCN [
5,
6,
7] are met:
The OCN topology is scalable;
The OCN topology is highly interconnected;
The network requirements do not extend the range of the types of structural-functional modules (SFM) used;
SFMs are completely interchangeable and substitutable with regard to their form, setup, and functions;
The OCN topology allows for changes in the configuration in order to ensure the fault tolerance of the system.
In earlier work, we analysed the existing methods aimed to enhance the reliability and fault tolerance of aircraft systems by increasing the level of automation and intelligence of avionics suits [
8,
9,
10,
11]. The analysis revealed the following major drawbacks of these methods:
- (a)
Low flexibility and scalability resulting from the strictness of the architecture of the OCN;
- (b)
Inability to eliminate faults occurring in situations which are hard to formalise (describe);
- (c)
Vulnerability of the expert system due to its centricity;
- (d)
Relatively slow inference as a result of a lack of parallelization.
Therefore, the development of an advanced intelligent avionics system requires, besides other improvements, attending to the drawbacks listed above. Thus, in order to eliminate the first drawback, we need to reconsider the design of the OCN at the hardware level. One of the obvious solutions is to create a switchless environment for the association of all the nodes of the OCN. At the moment, one of the most advanced switchless environments is an onboard all-optical network (OBAON) based on fibre optics [
12,
13,
14]. Onboard all-optical networks have the following advantages:
They create a switchless environment which makes the process of dynamic reconfiguration of the OCN significantly easier and minimises the intelligent inference time in emergency situations. This is of utmost importance for the functioning of the OCN during flight.
Complete determinism of the states and parallelism of the processes of data exchange between the functional nodes and computing units of the OCN. This prevents delays and removes the need to use various arbitration algorithms, which, in turn, enhances the reliability and fault tolerance of the whole OCN.
These advantages can make the implementation of real-time intelligent and expert systems based on such OCNs significantly easier due to the high flexibility of the system and the ability to alter the structure and hierarchy of the key functional nodes at the software level only, i.e., without using any special hardware.
Drawbacks (b) and (d) are neutralised by introducing an additional coprocessor to the expert system based on neural network principles. By doing so we can implement the inference procedure without formalising the process. At the same time, the neural network method ensures the parallelism of inference, which significantly reduces the reaction time of the expert system.
Drawback (c) can be avoided by employing copies of the expert system on all the computers of the OCN. This is a complex process, which is often impossible in classical OCNs with rigid hardware implementation. However, using an onboard all-optical network as a switch environment makes the duplication and distribution of the corresponding system across all computers easier. This task can be performed mainly at the software level without employing the hardware of the OCN.
We should also note that the implementation of an OBAON-based OCN helps to solve another important problem: the localisation of system faults (both unexpected and progressive). Since a standard switching environment involves temporal compression, it is impossible to avoid delays and queues at the switches of the OCN. It also requires the use of an additional decision-making unit, which performs the arbitration of the data flows (i.e., the information exchanged by the functional tasks at the application level located in different computing modules of the avionics suit by means of a switch environment). This decreases the determinism of the exchange process and makes it significantly more difficult to monitor the collisions. This problem is especially urgent for progressive faults occurring as a result of accumulation of a critical number of collisions during the data exchange process. When an onboard all-optical network is used, the data exchange between the elements of the OCN proceeds in parallel, without delays and arbitration, which allows accurate localisation of collisions and thus increases the level of determinism of the whole system.
The purpose of our study was to design an OCN with an intelligent control system, which would monitor the state of the avionics suit and provide inference in the form of scenarios for the automatic control system or in the form of recommendations for the aircraft crew in emergency situations.
The novelty of the suggested concept lies in the possibility to design a switchless computing environment which could integrate all the functional tasks and systems by means of point-to-point connection completely independently and in parallel. This approach allows for more effective and flexible use of computing power and a fast reconfiguration of the onboard network aimed at the creation of promising intelligent and expert avionics systems.
2. Design Principles of the Onboard All-Optical Network
The design of the integrated optical information environment is based on three principles.
It employs wavelength-division multiplexing (WDM), which makes it possible to multiplex a number of optical carrier signals onto a single optical fibre. Each information flow is transferred via a single optical fibre at its own carrier frequency (
Figure 1) [
15,
16,
17].
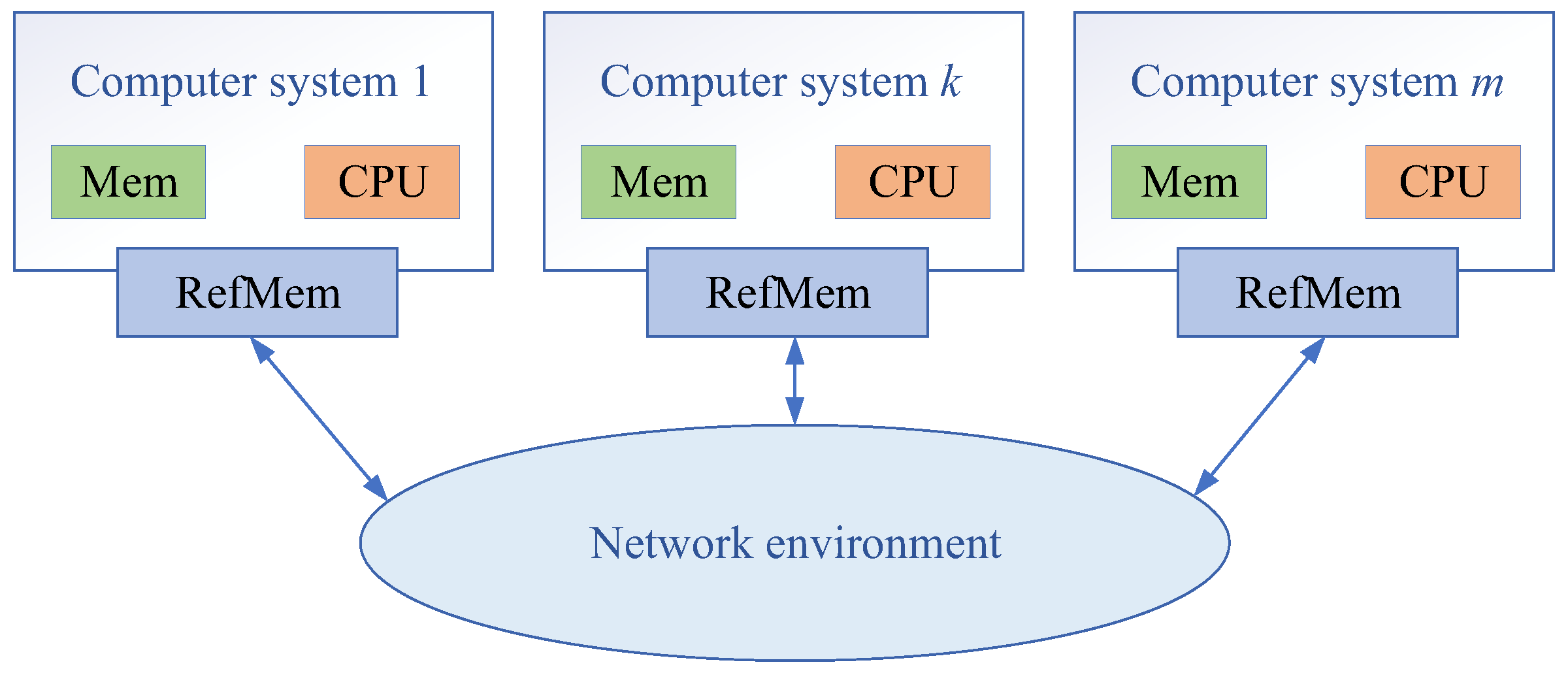
The data exchange is based on the principle of distributed shared memory (DSM). Each software application has its own memory area, which in turn is a window for data exchange with “external” subscribers of the fibre optic medium (
Figure 2) [
18,
19,
20].
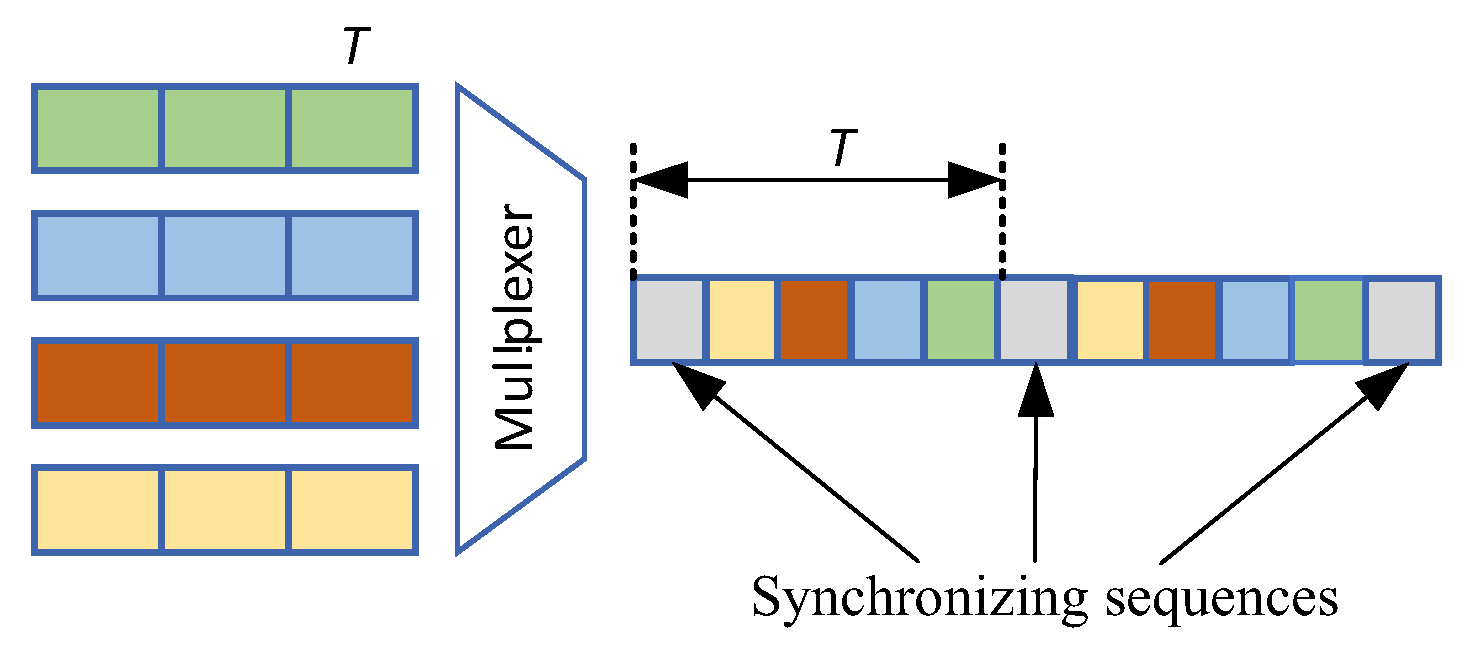
The time-division multiplexing (TDM) method is used to transmit several digital information flows. The optical carrier is then modulated in the optical transmitter and transmitted via the optical fibre. After that, it is transformed into an electric signal by the optical transformer. The signal is then divided into information flows (
Figure 3) [
21,
22].
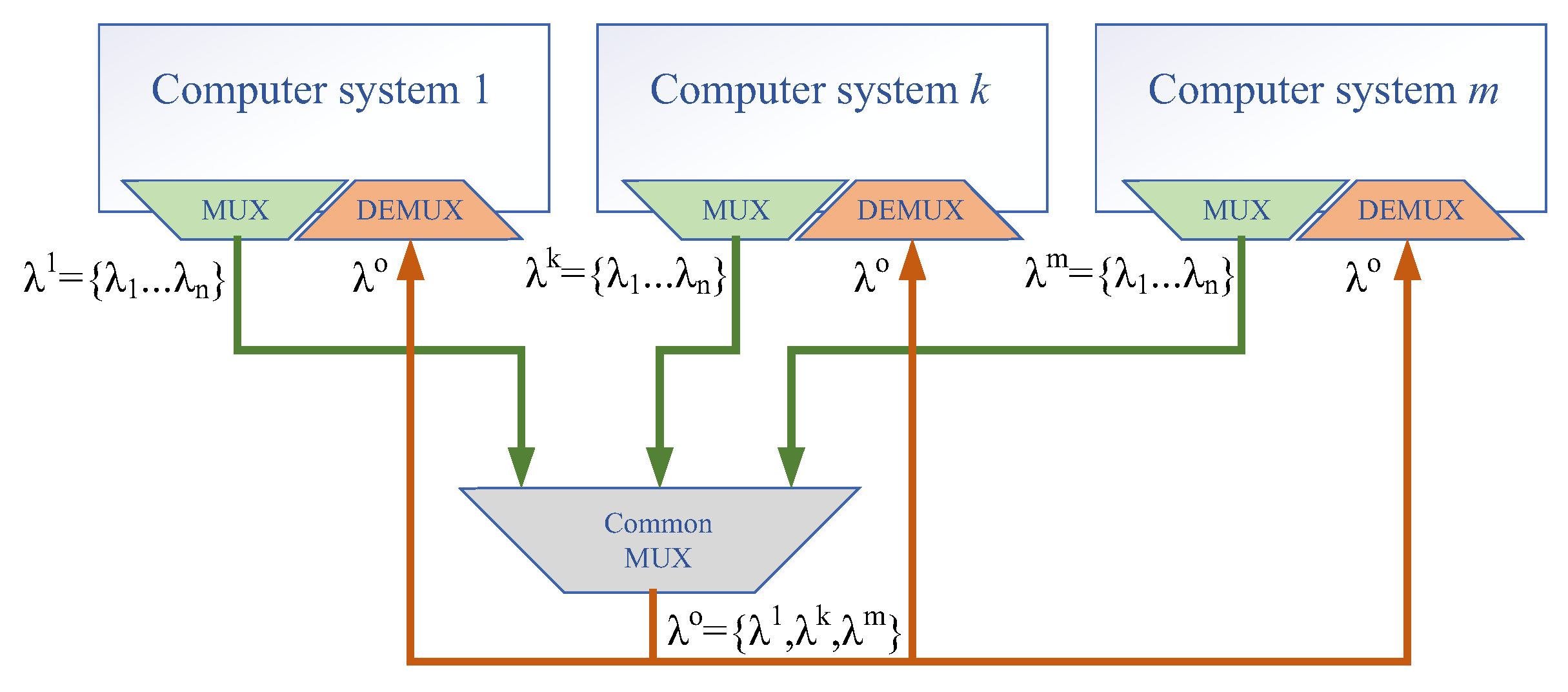
The architecture of the OCN based on the on-board all-optical network and the principles listed above is demonstrated in
Figure 4.
Therefore, an OBAON-based OCN is a network where each computing system, being the network’s subscriber, is assigned a certain group of wavelengths (-channels) at which the node transmits the data. Signals from all the nodes are accumulated by an optical multiplexer, where they are combined to form a single -channel, which goes back to the nodes of the network. Each node receives a multiplex signal represented by all wavelengths over a single fibre. We can thus organise switchless parallel interaction of the following types:
One-to-all;
All-to-one;
All-to-all.
3. Intelligent Control
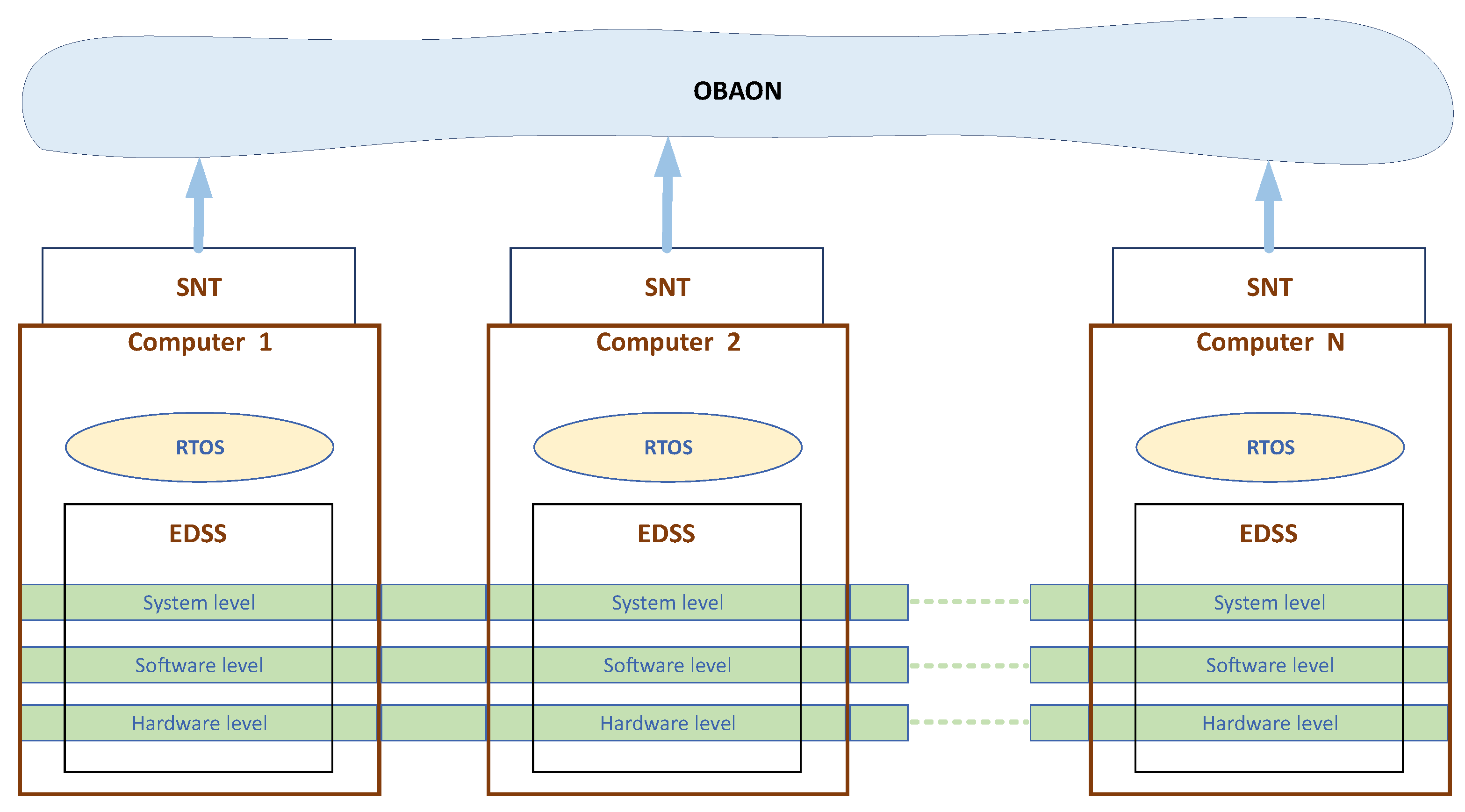
It is obvious that in order to ensure the reliability and fault tolerance of the avionics suit, it is necessary to create a monitoring system whose functions can cover all the control levels. For this purpose, it is necessary to implement a special expert decision support system (EDSS) in the OCN. An expert decision support system for the intelligent control of the OBAON-based OCN should function at three levels:
The hardware level (diagnostics and control over the key nodes of the onboard all-optical network);
The software level (diagnostics and control over the key elements of the real time OS (RTOS) of each computer of the OCN);
The system level (diagnostics and control over the information exchange between all the computers of the OCN).
From the point of view of mathematical description of the dynamic model of the EDSS in emergency situations, it is obvious that it can function effectively at all levels if the base for the decision-making process includes both formalised and non-formalised data (behavioural patterns which result in the elimination of faults). To describe the formalised data, we can use the inference method suggested by the theory of expert systems, while to describe the non-formalised data we can use the neural network method. By data that are hard or impossible to formalize we mean both the description of the behaviour of the pilot in an emergency situation and the description or identification of unlikely events and conflicts.
The key advantages of the inference method are its deterministic character and the predictability of all the intermediate states as well as the final state of the system. This method is based on the state space, where the transition between states is performed by means of interaction with the knowledge base (KB). The knowledge base is a set of rules (behavioural patterns) formalised by an expert and a knowledge engineer (i.e., a specialist whose task is to formalise knowledge). A drawback of the inference method is that it is rather limited and cannot be used to generalise the knowledge of the expert so as to synthesise new knowledge not present in the knowledge base, but logically derived from its content. This drawback is not characteristic of systems based on the neural network method [
14,
23,
24,
25,
26]. Other advantages of such systems include the following:
An ability to reproduce complex nonlinear dependences;
Fast response (especially when the hardware implementation is based on parallel processing, for instance, programmable logic devices);
Presumably high noise and fault tolerance;
Universal nature;
An ability to solve non-formalised problems (image and speech recognition, cluster analysis, identification, prediction, etc.).
A drawback of the systems based on the neural network method is the need to provide a large data sample for the training of the neural network.
Therefore, combining the two approaches, we can design an effective intelligent system which can solve a wide range of problems and perform flexible analysis of the current situation followed by an inference in the form of an autonomous control action or in the form of recommendations for the aircraft crew.
We should also note that the neural network method used in the design of intelligent avionics system has a negative effect on the determinism of the states of the avionics suit at any moment in time. To compensate for this effect, we should carefully choose the principles of interaction of the control systems directly with the neural network and seek to use this approach in the areas not sensitive to the intermediate (uncertain) states of the systems.
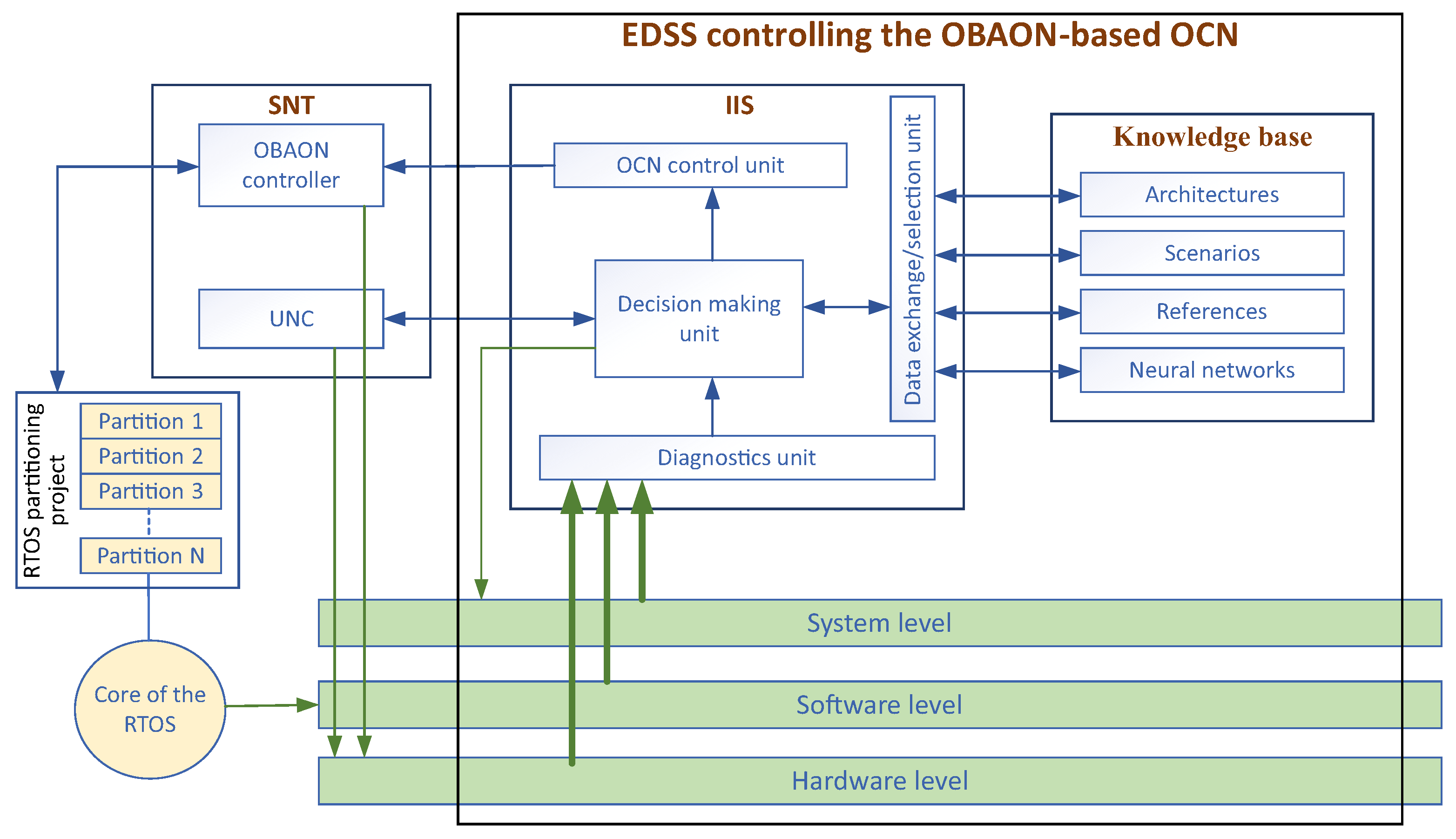
Here, we suggest an integrated intelligent system (IIS) which is a part of the expert decision support system for the intelligent control of the OCN and combines both of the approaches described above. The architecture of the IIS as a part of the EDSS is shown in
Figure 5.
The implementation of the expert system within the OCN is presented in
Figure 6.
Figure 5 and
Figure 6 demonstrate that the IIS is a part of the EDSS used for the intelligent control of the OCN. It functions together with a special knowledge base for intelligent support (SKBIS). For the correct functioning of the intelligent support, it is necessary to implement the expert system on all the computers of the OCN with real-time OS (for instance, JetOS [
27,
28]). The connection between the copies of the expert system is formed at all three levels: the hardware, software, and system levels. At the hardware level, the interaction between the elements of the OCN is performed by means of a spectral network terminal (SNT), providing for the formation of the onboard all-optical network.
The SNT is a device which includes a controller of the OBAON, which performs data integration, as well as configuration, control, and diagnostics of the optical elements (namely, the SFP modules, the wavelength selective switch, the optical amplifier, the splitter, etc.). The SNT also includes a universal neural computer (UNC) functioning as a neural coprocessor [
14]. It is possible to upload or reload one neural network out of an arbitrary set of networks to the UNC matrix without changing its configuration. A scheme of the SNT with four optical channels implemented using programmable logic devices is given in
Figure 7. It is also possible to design an SNT with any number of optical channels.
4. Composition and Functioning Principles
The IIS consists of the following functional units.
Diagnostics unit. This unit collects diagnostic information at three levels. At the hardware level, it collects information about the state of the SNT and the optical elements of the onboard all-optical network. At the software level, the unit collects information from the Health Monitor real time OS regarding how well the software processes are functioning. At the system level, the unit collects information from all the copies of the expert system regarding the presence/absence of collisions, predicted failures, and emergencies.
Therefore, the diagnostic information can be presented as a set of states
where
is the subset of the states of the elements of the SNT,
is the subset of the states of the elements of the onboard all-optical network,
is the subset of the states of the functional blocks of the real time OS, and Dsys is the subset of the states of the expert decision support system, which is a part of the network of interconnected copies of the EDSS of the OCN.
contains the following state vectors:
where
is the state of the Aurora channel transceivers,
is the state of the FIFO memory blocks,
is the state of the internal flow switches,
is the state of the direct memory access for PCIe,
is the state of the neural computer.
where
is the state of the optical transceivers,
is the state of the wavelength selective switch,
is the state of the optical amplifier, and
is the state of the optical splitter.
where
represents the faults in the RTOS module,
represents the faults in the isolated sections of RTOS, and
represents the faults in the RTOS processes.
where
is the state vector of the special knowledge base for intelligent support,
is the state vector of the IIS, and
is the state vector of the expert decision support system.
The set of states
(
1) from each computer of the OCN is accumulated in each copy of the expert system as a set of states of the whole OCN:
where
N is the number of computers functioning within the OCN.
OCN control unit. The unit configures the SNT as a part of the onboard all-optical network in accordance with the current operation mode (or a corresponding scenario in a situation of emergency).
Data exchange/selection unit. The unit selects the data from the knowledge base required for the inference performed by the decision-making unit.
Decision-making unit. The unit is the core of the expert decision support system. It interacts in real time with all the copies of the expert system on the computers of the OCN and performs the analysis of the diagnostic information. It also selects the data from the knowledge base based on the acquired information and, using the UNC, if necessary, performs inference regarding the state of the system as a whole. If the unit detects an emergency situation, it searches for an appropriate scenario in the knowledge base and initiates the process of dynamic restructuring of the system that helps to eliminate the occurring fault.
The special knowledge base for intelligent support includes the following sections (SKBIS).
Architecture section. This section contains a complete set of architectures of the OCN formed by the expert and the knowledge engineer responsible for the formalisation of knowledge based on the operational documentation and the experience of qualified pilots. Each architecture in the set (except for the basic one) is formed as a result of dealing with a hypothetical or a real emergency situation.
Let us consider the way data are formalised in the architecture section of the SKBIS. Each architecture of the OCN in the formed set includes a description of the optical environment, the data integration of the functional tasks run by the computing units (CPU), and the distribution (assignment) of the tasks between particular CPUs. Therefore, each architecture of the OCN in the architecture section of the knowledge base can be presented as a special functional graph (SFG) consisting of three nested subgraphs, which describe the optical switching environment, the data integration between the main functional tasks (FT), and the data integration between the computing units of the OCN.
An exhaustive description of the architecture of the OCN at this level of abstraction requires that the model should also include information about the computing power, its computing units, and the distribution of wavelengths across the optical ports of the onboard all-optical network (taking into account the fact that the optical transmission modules can be tuned to one wavelength out of the given set of wavelengths , while the optical receiving modules function at the whole range of wavelengths within the set).
Let us now describe the SFG and its subgraphs using the incidence matrix (IM). Let the IM of the subgraph of the optical switching environment be , the IM of the subgraph of the interface between functional tasks be , and the IM of the subgraph of the computing units be .
The structure of the SFG can be presented as follows (
Figure 8):
It is obvious that subgraphs can be nested inside the SFG using various methods. The nesting process should be adaptive, i.e., it should be a response to the changes in the environment (diagnostic information). Thus, the architecture section (denoted as
) should contain static information about the composition of all the SFG (
) and adaptive information about the nesting rules of the subgraphs into each SFG (
):
Thus, the architecture section of the knowledge base (
) stores a set of SFG formalised as follows:
where
m is the number of architectures formed.
The adaptive architecture section (
) stores a set of rules used to nest subgraphs inside the corresponding SFG. It is formalised as follows:
Scenario section. This section stores a set of scenarios enabling the system to deal with any failures. The scenarios are formalised as production rules in terms of predicates and quantifiers. Thus, normal operation of the OCN can be described as follows:
where a set of states
is stored in the
Reference section (
Figure 6) of the knowledge base and is fully complementary to the set
(
6). Predicate
describes the correspondence of the diagnostic information to the reference set and forms a production rule
, which describes normal operation of the system.
Then, a failure can be described as follows:
In this case, a production rule is formed, which describes the solution for handling the fault according to parameter x.
Thus, the operation of the expert decision support system involves continuous comparison of the diagnostic information with the reference state of the system corresponding to the current operation mode. Using the current production rule, the IIS produces inference regarding the required actions.
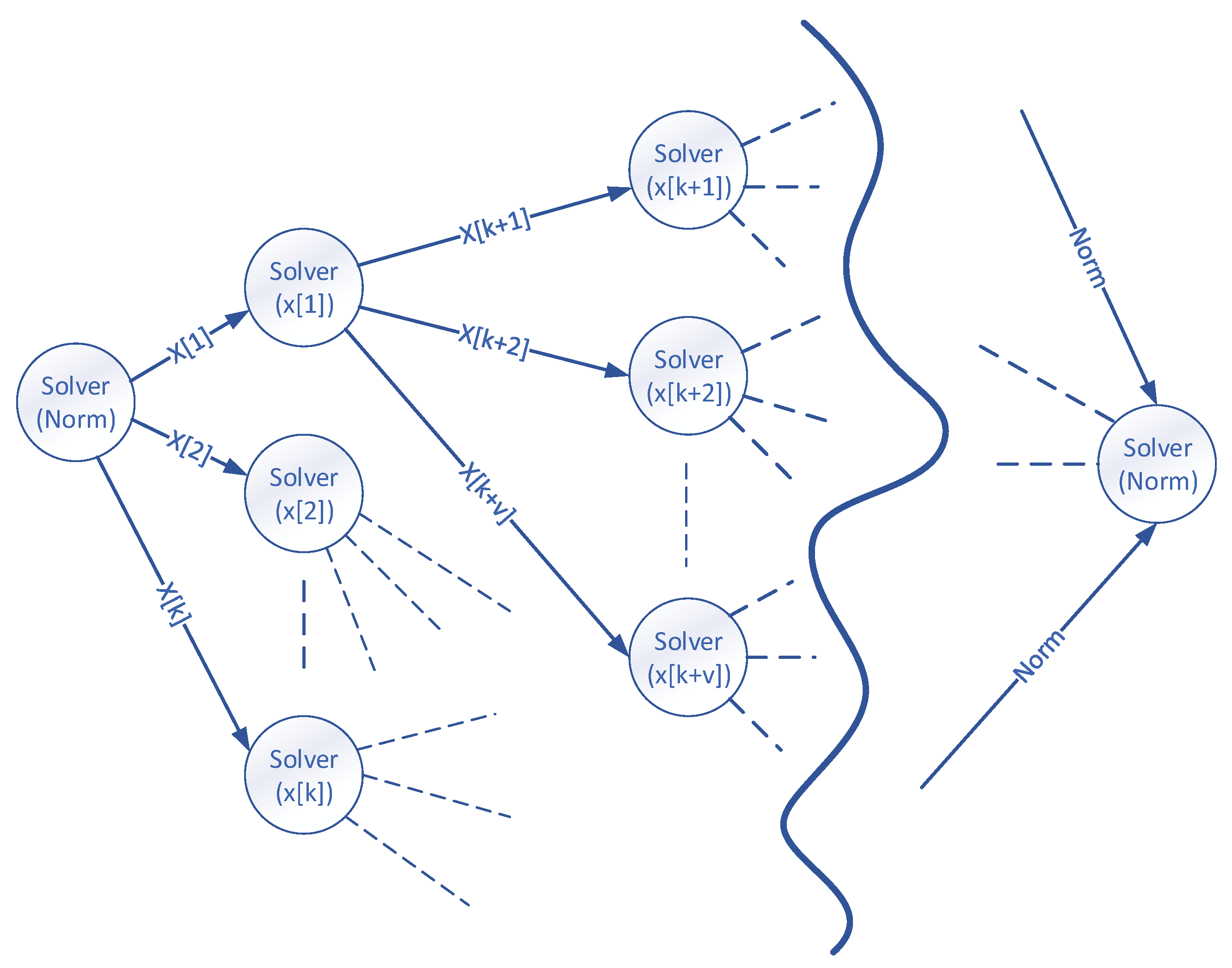
The functioning of the expert system can be dynamically represented as a state space (tree) which is represented as the following directed graph (
Figure 9):
It is obvious that there can be several production rules (solutions) for a single failure, which may result in a conflict set, i.e., the absence of a clear path in the state tree. To solve this problem, i.e., to find an optimal solution among the existing ones, we can use a method based on the minimisation of the objective function:
Another way to solve this problem is to use neural networks.
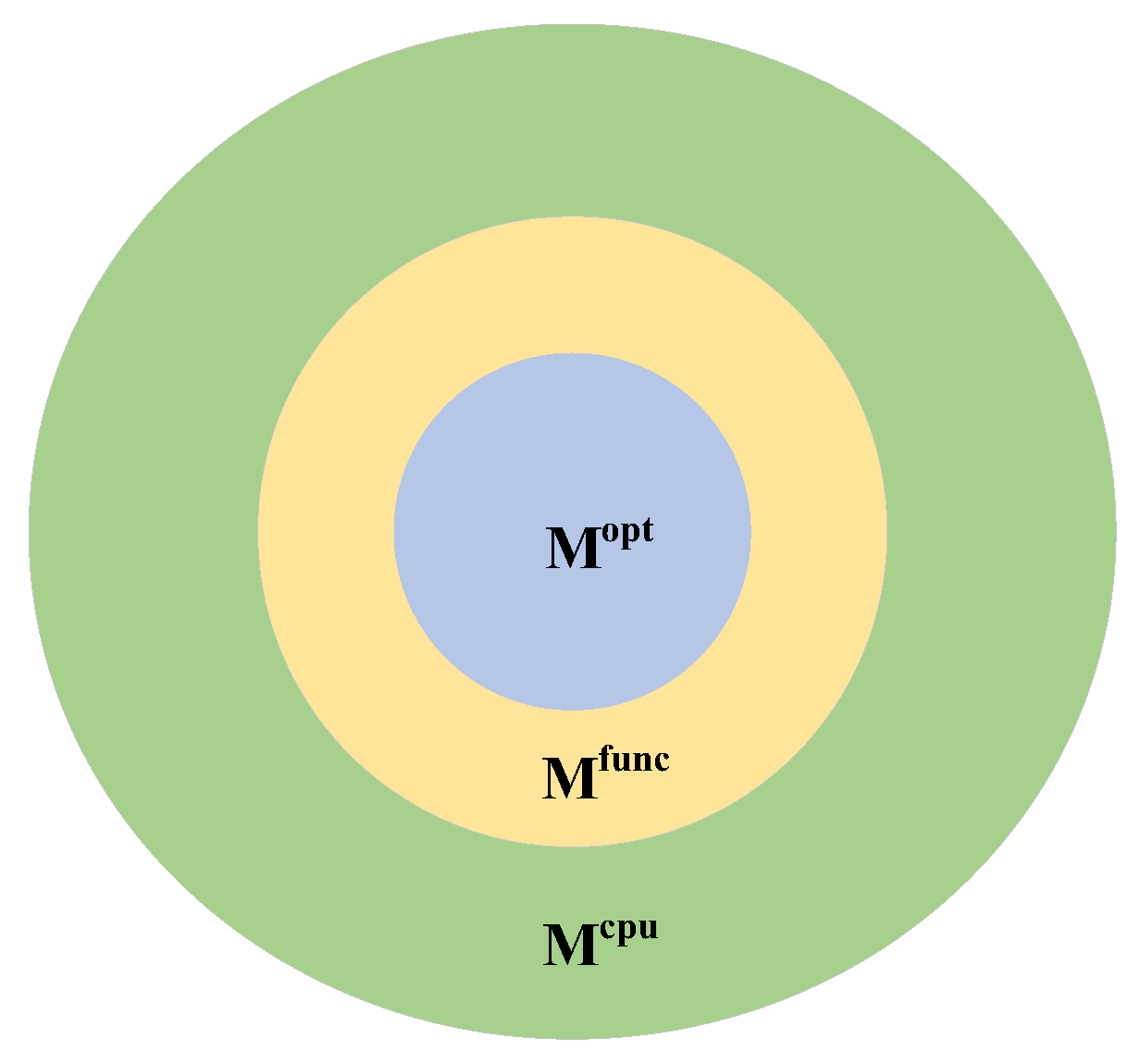
Neural network section. This section contains a set of neural networks which can be dynamically implemented by a UNC (a part of the SNT). Such neural networks function as coprocessors of the decision-making unit (a part of the IIS). They can be used to solve a wide range of problems. Since the dynamics of the UNC is described as follows [
14]:
where
M is the neuron interaction matrix,
B is the displacement vector, and
is the activation function vector, any neural network (
) implemented by the UNC can be described using the subset
Therefore, the neural network section contains a set of neural networks
, which is a group of subsets (
16):
where
p is the number of neural networks in the
set.
5. Dynamic Reconfiguration of the OCN
Algorithms of dynamic reconfiguration for various operation modes of the OCN present an individual case in a set of scenarios described in terms of a state space stored in the knowledge base. The algorithms of reconfiguration of the OCN during the flight must comply with strict requirements as to their reliability, fault tolerance, and response time. This is why such algorithms should be characterised by complete determinism of the states of the system at each moment. Therefore, for this mode we use only the part of the IIS responsible for direct inference. When there are no ready solutions for a particular emergency, the IIS employs its neural network section. However, the generated solution is not applied automatically, but rather is presented to the crew as a set of recommendations.
The functioning of the expert system in a case of failure and initiation of the reconfiguration process can be divided into two inference strategies.
- (a)
Adaptive search. Under worsening flight conditions and in difficult situations, faults are eliminated by redistributing the wavelengths
across active (not reserve) functional tasks of the RTOS and forming a new
(
11).
- (b)
Optimal choice. Searching for an appropriate configuration
(
9) in the knowledge base in emergency and catastrophic situations.
Besides the information about the architecture of the required configuration of the ONC, the IIS also considers the required computing power and the available memory.
Presented below is a classification of configurations stored in the architecture section of the knowledge base.
Basic configuration (BC). An independent configuration of the OCN that provides for the full functionality of the avionics suit and correct operation of all its systems.
Decomposition of the basic configuration (DBC). A child configuration that is a variant of a certain basic configuration with a different distribution of functionality across the OCN.
Emergency configuration (EC) A child configuration, which is a variant of the basic configuration, with some of the secondary functions being disabled. These functions do not affect the performance of the OCN, but their disabling lowers some of the parameters as compared to the BC.
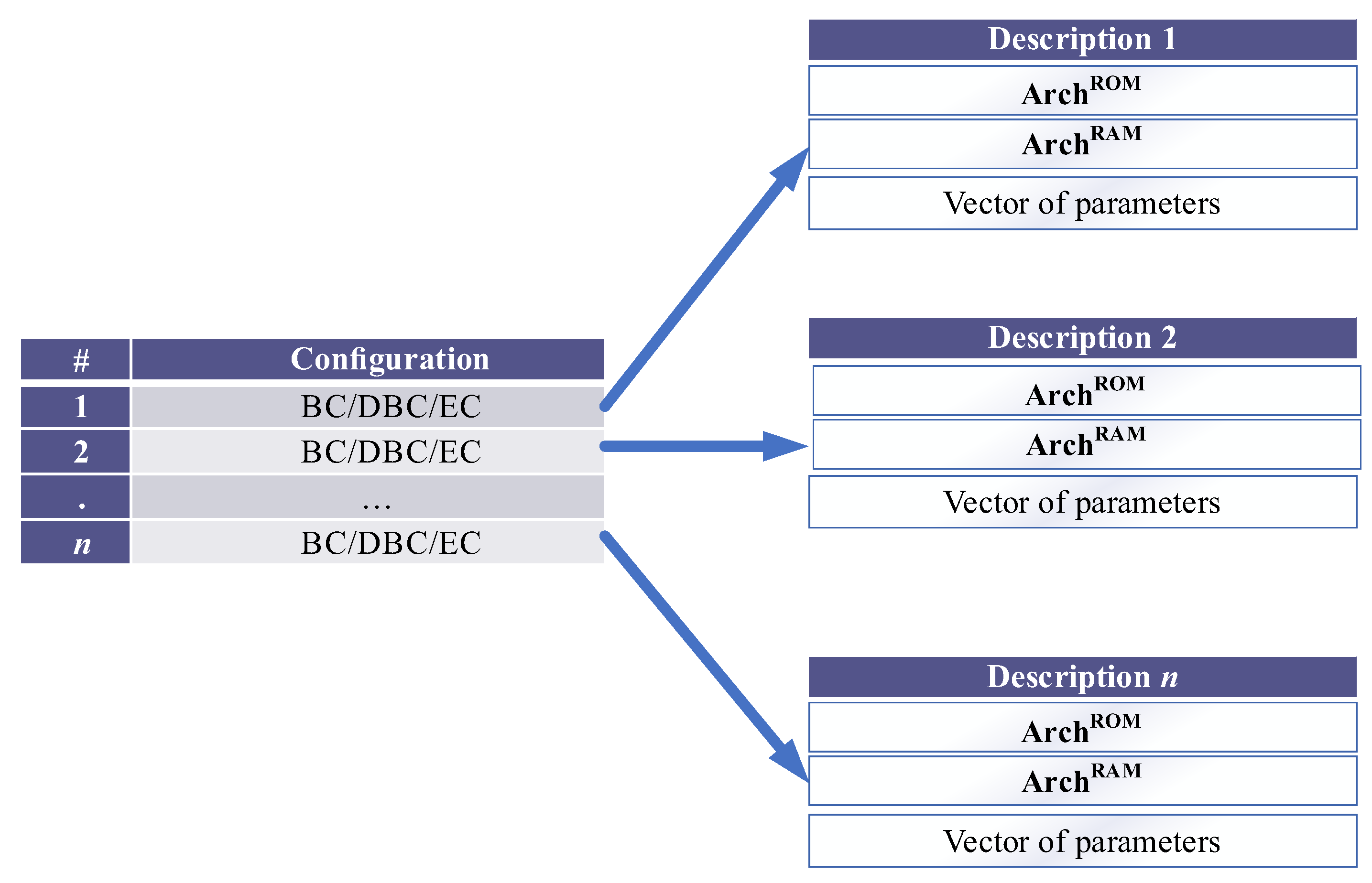
Besides describing the distribution of the computation tasks among the computers of the OCN, each configuration in the architecture section of the knowledge base has the following parameters characterising their reliability.
Accuracy. A parameter which characterises the accuracy of all the systems in a particular configuration.
Usability. A parameter which characterises the usability of the interfaces of the avionic suit actively interacting with the pilot and thus affecting the response time in a situation of emergency.
Reliability. A parameter which characterises the fault tolerance and reliability of the configuration.
Additional parameters of the configurations are the resource characteristics of the functional tasks and computing units of the OCN involved in a particular configuration. These parameters are used by the decision support expert system to assess the uniformity of the distribution of computing resources (load) across the computing units of the OCN.
Therefore, the organisation of the architecture section of the knowledge base and the structure of description of each configuration can be presented as shown in
Figure 10.
In an emergency situation, the reconfiguration process involves searching for an appropriate configuration in the architecture section of the knowledge base, choosing the optimal configuration (when there are several options) and initiating the dynamic reconfiguration of the whole OCN. The decision-making unit in the IIS is responsible for the initiation and effective implementation of the whole process. When the process is to be implemented during the flight, deterministic search algorithms are used. They prevent uncertainty, with each stage of the process being fully determined and predictable. When the reconfiguration is performed on the ground, i.e., when time is not strictly limited, the IIS can employ nondeterministic search algorithms based on the neural network method. It chooses a configuration of the feedforward neural network from the neural network section of the knowledge base, loads it to the UCN and initiates the search algorithm, which is basically an algorithm for the classification of objects (configurations) [
29,
30,
31].
Although based on a nondeterministic algorithm, this search can only provide a determined result, i.e., a result present in the knowledge base. Therefore, thus found solution can also be called deterministic, the only difference being that it is impossible to determine the intermediate states of the neurones in the UNC until the search is finished.
6. Comparative Analysis
The concept of the design of an onboard computing environment based on optical technologies with an intelligent control option suggested in the article is an extension of [
6,
12,
13,
14,
32,
33,
34]. At the same time, ref. [
32] focuses only on the design of a network based on WDM. It does not consider the possibility of implementation of any systems, including an intelligent system, within this environment. The authors of [
33] suggests methods for and analyse the effectiveness of programmable control over the architecture of a hybrid network containing optical and copper segments. However, the network considered in the article is a telecommunication network, not an onboard network. The authors of [
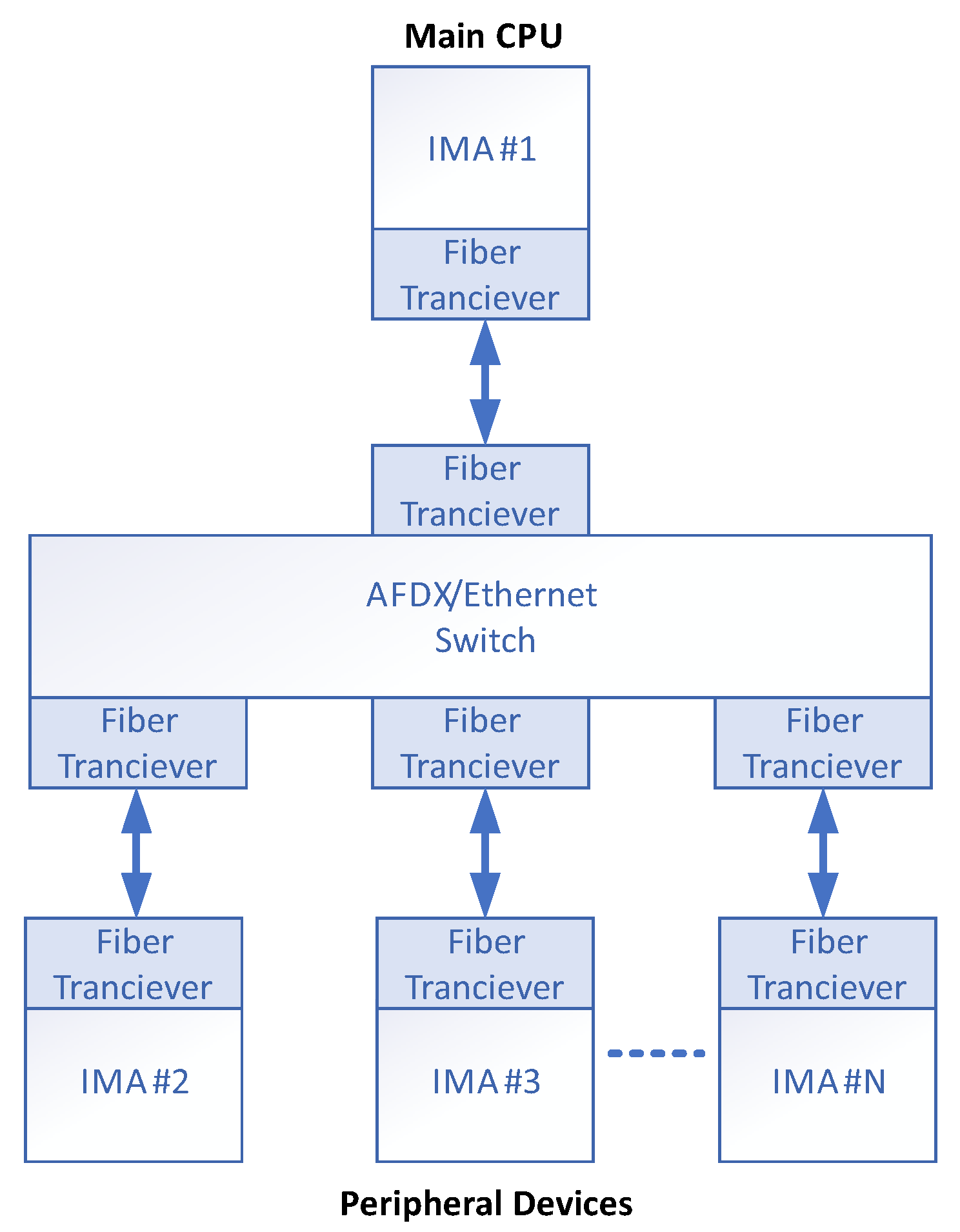
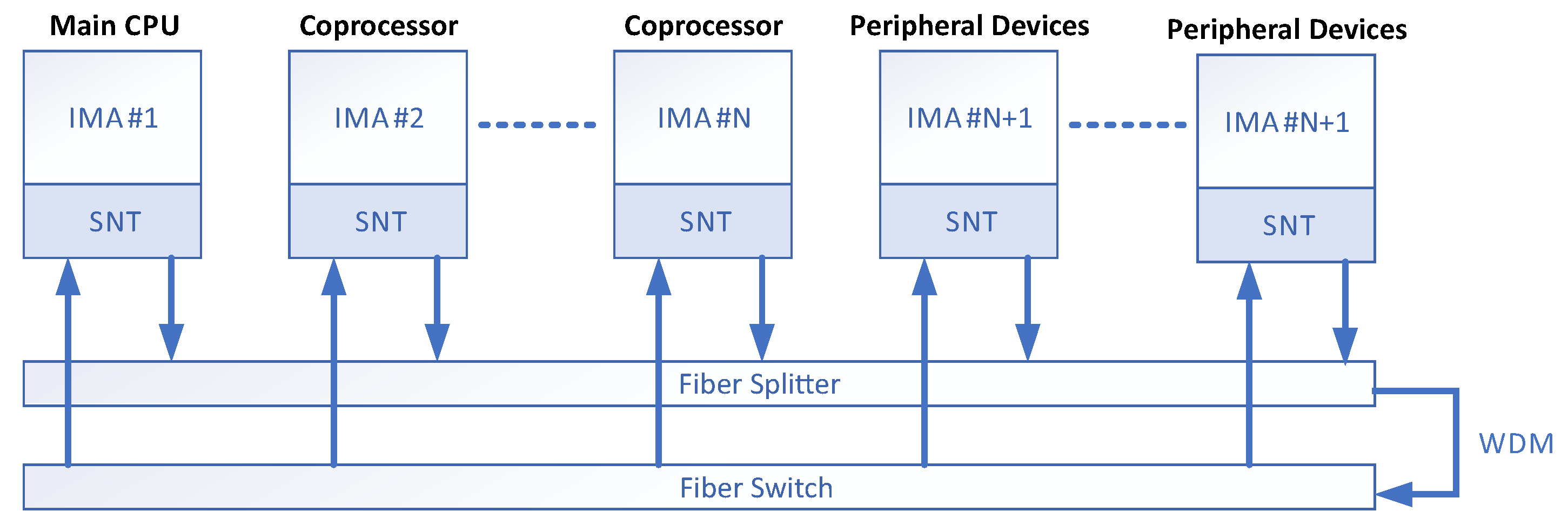
34] consider methods of dynamic reconfiguration of an optical network aiming to redistribute the data flow between various computing nodes of the network by redirecting them to less busy optical channels. It is obvious that this is just one of the many approaches which can be implemented in such an optical environment with flexibility and efficiency. In our study, we considered the results of the works listed above and extended the possibilities of functioning of such optical systems both at the hardware and software levels. To sum up, we can demonstrate the difference in the hardware implementation of the onboard network in
Figure 11,
Figure 12 and
Figure 13.
Figure 11 presents a classical communication environment. The interaction between its nodes is performed by means of copper wires (twisted pair) according to the AFDX or Ethernet specification. This environment is centralised and has drawbacks related to the time division of the channels: queues, complicated arbitration of the data flows, and difficulty of reconfiguration.
Figure 12 demonstrates a communication environment with optical interfaces, which has higher capacity. However, it has the same drawbacks as the classical topology.
Figure 13 shows the topology based on an all-optical onboard network (switchless environment). This environment does not have the aforementioned drawbacks. It has high capacity due to its parallelism and is scalable and decentralised, which facilitates its dynamic reconfiguration (the process can be implemented in real time).
The main reason that this type of connection (
Figure 13) is not yet widespread is its difficulty of installation. It is important to accurately align all the elements of the fibre optical network (the source and the receiver of the signal and the optical channel). The alignment and installation require high-precision, expensive equipment. Besides, fibre optical connections are not robust to external factors: the displacement of the elements in relation to one another or excessive bending of the fibre optics can result in the disruption of communication, which would be difficult to fix. As for multichannel fibre optical systems, a larger number of channels results in better performance coupled with even greater difficulty in assembling. However, fibre optical systems and technologies are actively developing, their application is becoming simpler, and the requirements for the external factors less strict.
Let us compare a classical network architecture (
Figure 11) with the architecture suggested in this article (
Figure 13) using several basic parameters. Let us consider a situation close to real life. In this case, the OCN consists of
computing units, and each computing unit covers
functional tasks. Each task requires about
Mbit/s of the network traffic. We can thus easily calculate that, in this case, the network switch must have a maximum capacity of about
Therefore, to use the 10GBASE-T standard (or similar standards) the switch must have at least channels.
A network switch imposes certain time limitations on the functioning of the network. They include queuing delays, serialization delays, and propagation delays. It is obvious that the architectures considered here have serialization delays of the same order. The same is true for the propagation delays (they can be neglected due to a small distance between aircraft systems). Therefore, the considered architectures differ mainly in the queuing delay.
It is noteworthy that the serialization delay for 10GBASE-T standard networks is about
s. Then, in the limiting case, for the classical architecture (
Figure 11) the transmission delay is approximately
As we can see from the example, for the classical architecture (
Figure 11) the propagation delay depends significantly on the number of channels in the switch and on the performance of its computing unit.
It is obvious, that when an all-optical onboard network is used (
Figure 13), the packet exchange process proceeds in parallel, without queues and arbitration (in the switch). Therefore, regardless of the number of channels
the transmission delay is always
.
An important parameter for the dynamic reconfiguration of the onboard network in case of emergency is also the time required for such a reconfiguration. To reconfigure a classical onboard network (
Figure 11), it is necessary to reconfigure the switch, as well as the computing units and their functional tasks. This is a rather difficult task considering the fact that it is necessary to maintain the integrity of data in the queue and to reconfigure and reset the operating system of the switch at the same time. Such a reconfiguration can take several seconds, which is critical in emergency situations.
Reconfiguration of an all-optical onboard network (
Figure 13) does not require much time or computing power, because the optical environment does not have a computing element and its reconfiguration involves changing optical channels to Fiber Switch and SNT. Reconfiguration of all the channels of the optical environment requires several milliseconds (a set of brief instructions sent via RS-232 and I2C interfaces).
Let us consider another important parameter for the construction of onboard networks, namely the communication line weight. As we know, for instance, CAT5/CAT6 Ethernet cables used in classical networks (
Figure 11) weigh about 50 ft. per
lb., equivalent to
kg/m.
ITU.T G.652D optical cables used in all-optical networks (
Figure 13) weigh about 15 kg/km, equivalent to
kg/m. Thus, communication lines of all-optical onboard networks weigh several times (in our case, two times) less than communication lines used in classical networks.
7. Conclusions
The results of the study presented in this article can be used to design advanced avionics suits which will demonstrate a high degree of scalability, usability, and intelligence and will comply with a wide range of strict requirements for their reliability and fault tolerance. The introduction of fibre optics and the design of the onboard all-optical network based on it make it possible to significantly accelerate the dynamic reconfiguration of the avionics suit by reassigning the process from the hardware (reconfiguration of the switches) to the software level, which enhances the speed and the flexibility of the process. It also facilitates the integration of the intelligent control system, which receives information directly from the optical environment without additional switches or queues (as usually happens in classical onboard networks) according to the distributed memory principle.
The advantages of the hardware implementation together with the special expert decision support system functioning as a part of the computer network can significantly increase flight safety.
The suggested concept has a number of obvious advantages, including the enhanced electromagnetic compatibility, replacement of heavy cable connections, and implementation of a large number of functional tasks on the application level due to the high capacity of the optical channels. We should note, however, that this concept has several limitations. Thus, at the hardware level, it is necessary to provide a separate optical fibre going from the computing unit to the switch and the splitter for each functional task, which makes it difficult to cable all the fibres along the body of the aircraft. At the software level, the problem might be the interaction between the IIS and the Health Monitor real time OS of the computing module, since both components control the system at the same hierarchical level, and the Health Monitor is an independent and isolated element.
The reported study was funded by the Ministry of Science and Higher Education of the Russian Federation No. 075-15-2022-1024.



 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












