1. Introduction
As the technology around us continues to evolve in size, portability, intelligence, and efficiency, the next logical thing is to find a new purpose for existing components to improve their usability. With the advent of LEDs, researchers have started exploring its properties for establishing data communication between devices which gave rise to the complete new domain of VLC. Increasing interest in VLC has led to a need to revamp the previously existing modulation techniques, posing more unique challenges specific to the nature of visible light. However, the receiver side adoption of VLC is strictly limited to implementation based on Photodiode or Camera. Photodiodes are inexpensive and provide low complexity implementation for VLC as the modulation techniques are based on light intensity. In this case, achieving higher data rates is constrained to the response time of the photodiode [
1,
2,
3]. On the other side, exploration of other light properties such as color has shown promising results in terms of better data rate, Refs. [
4,
5] but as photodiodes are limited to sensing only light intensities, other techniques had to be explored.
OCC is considered one possible solution towards achieving a ready-to-use Li-Fi system by utilizing the camera’s properties, computational capacity of mobile phones, and chromaticity of the light [
6]. Since such systems use existing cameras integrated into mobile phones, they need not require additional dedicated hardware like photodiode [
7,
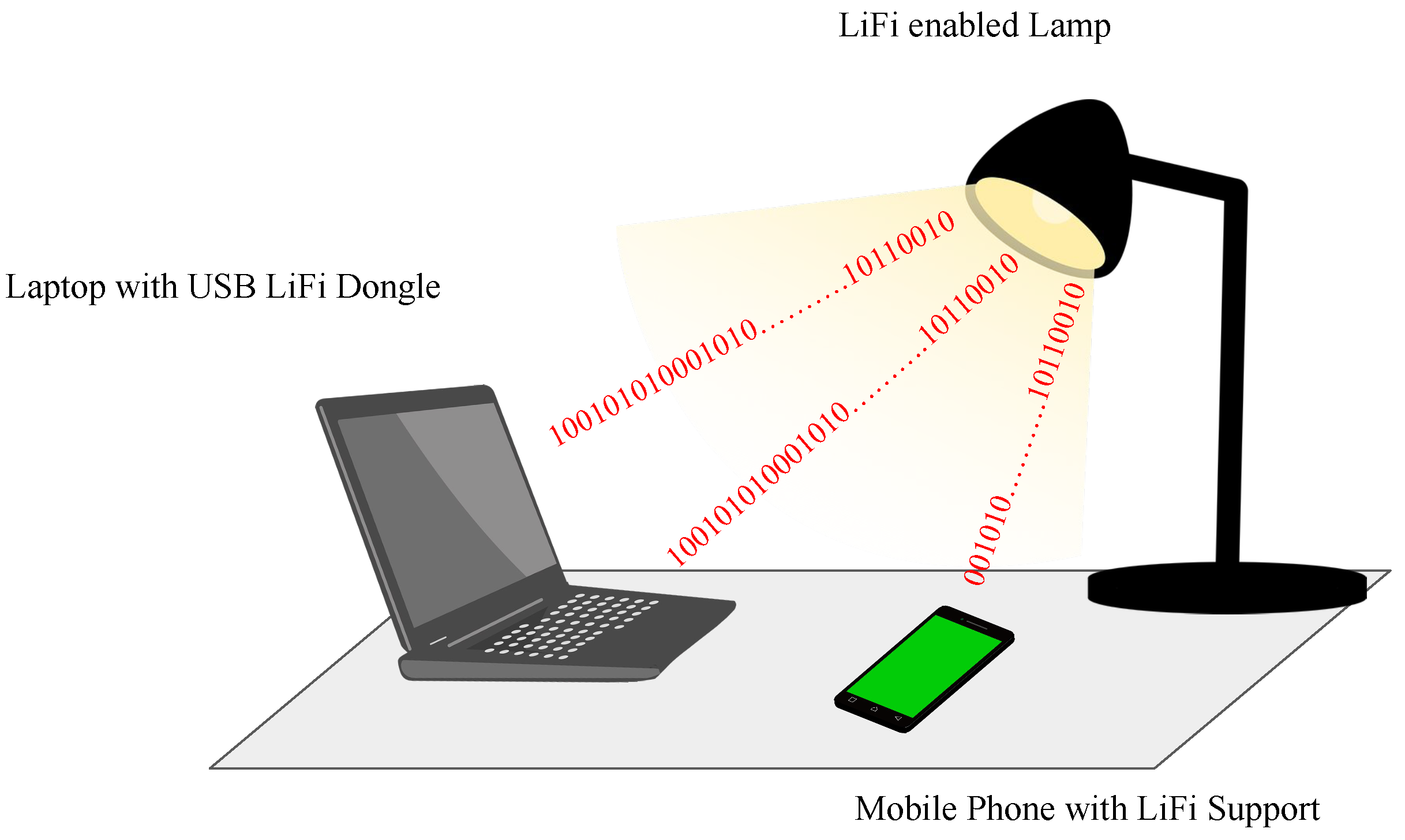
8]. These systems can be used in vehicle-to-vehicle communication, indoor localization, indoor positioning, indoor navigation and augmented reality. In a typical indoor environment, VLC Systems can be deployed as Lamps or Ceiling Lights, as shown in
Figure 1. However, other challenges related to the OCC-based Li-Fi System include identifying the Li-Fi access point, adjusting exposure, and video pre-processing. This paper proposes, implements, and evaluates a novel hybrid modulation technique and compares it with the existing two modulation techniques with similar implementational complexities. The objectives of this paper are
To study and experimentally evaluate thresholding techniques for On-Off Keying(OOK) and Frequency Shift Keying(FSK) modulation schemes under OCC.
To propose and implement Hybrid Frequency Shift Pulse Duration Modulation scheme for OCC.
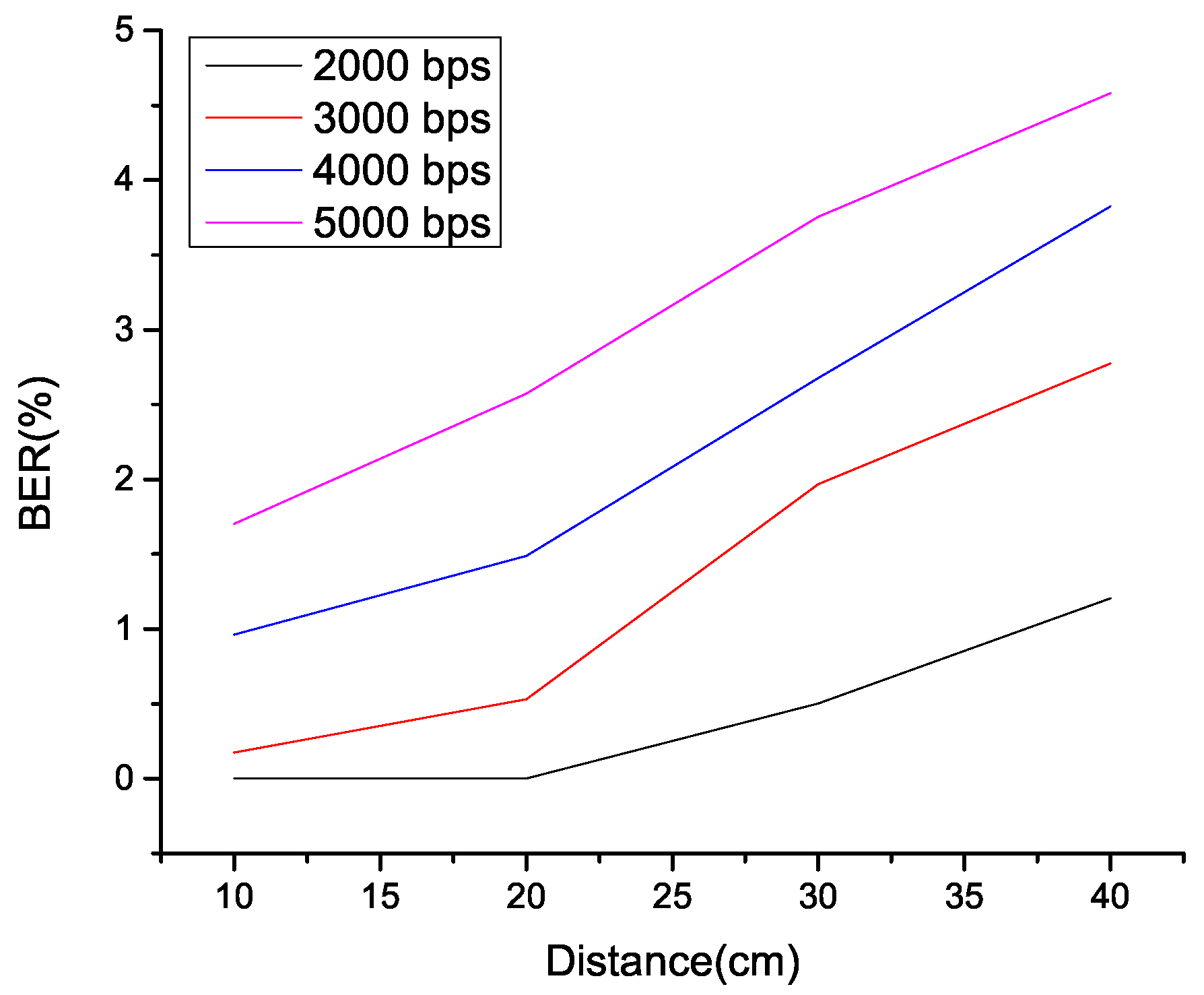
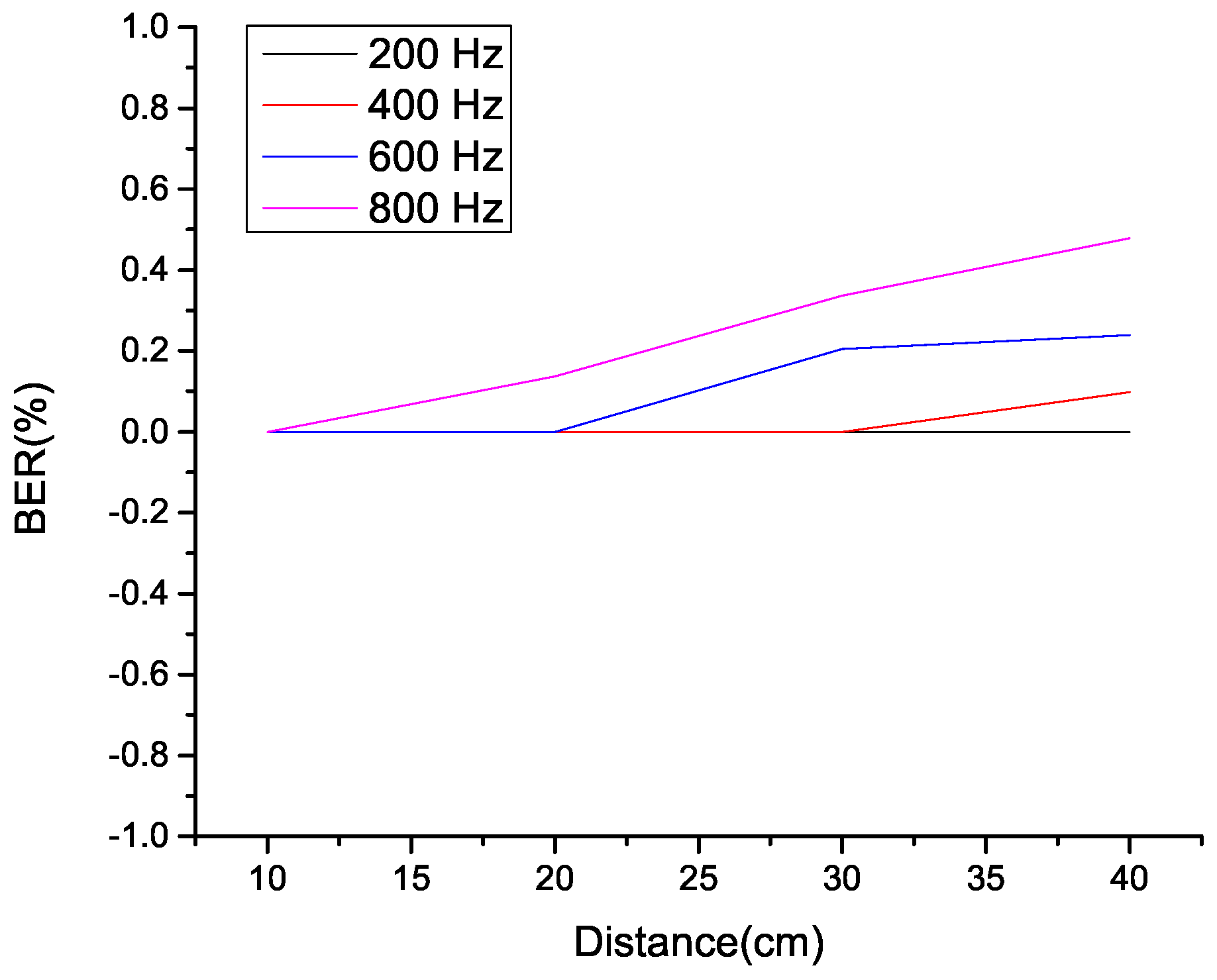
To evaluate the performance of the proposed technique based on Bit Error Ratio (%), distance, and frames per bit.
The remainder of the paper is organized as per the following structure. In
Section 2, previous studies in the related domain are summarized. In
Section 3, an overview of the OCC system is provided, with a basic design and description of other functional elements of the system.
Section 4 discusses the design and implementation of reference modulation techniques such as OOK, FSK, and the proposed HFSPDM.
Section 5 highlights the obtained experimental result of each modulation technique and provides comparative performance analysis.
2. Related Work
This section highlights previous work carried out in the domain of OCC, specifically about its challenges in adopting Li-Fi Systems, modulation techniques, and thresholding mechanisms. In paper [
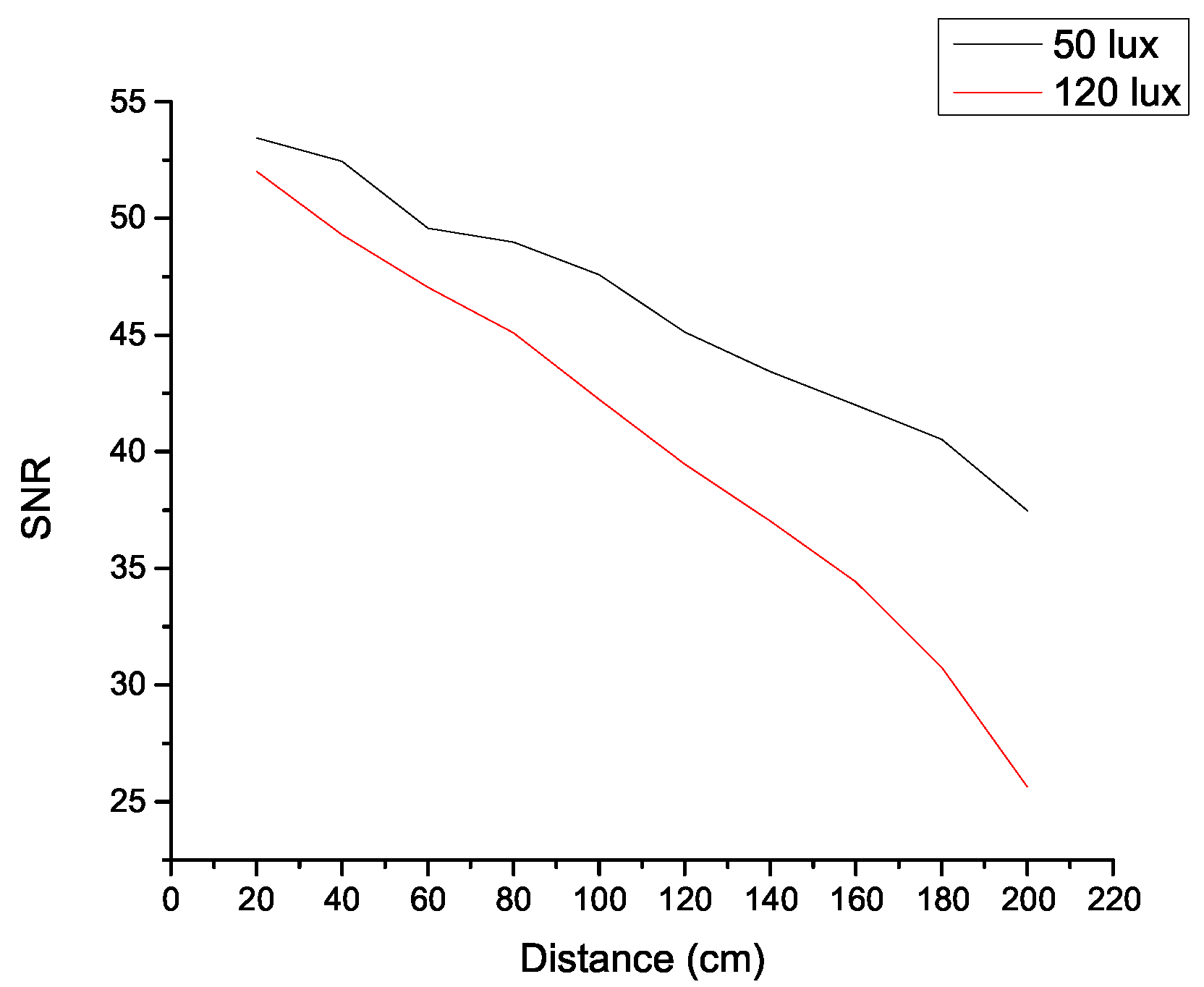
9], the author has provided a performance analysis of OOK modulation based on different camera parameters such as frame rate, focal length, rolling rate, and shutter speed. It was observed that the pixel intensity was higher for closer distances, resulting in a high Signal-to-Noise Ratio(SNR) and thus better data decoding. Paper [
10] shows the effects of ISO exposure values on the Bit Error Rate. The experimental results demonstrated that the system observed an increase in noise, directly proportional to the camera’s sensitivity concerning ISO values and shutter speeds. In paper [
11], the difference between rolling shutter vs. global shutter is discussed. Issues such as mixed symbol frames, stripe width estimation, and image pre-processing are addressed by their proposed “Rolling Lights” System. These works provided sufficient insight into the relation between camera parameters and their impact on information reconstruction. It also helped to understand the “Rolling Shutter” phenomenon and techniques used for its adaptation in OCC.
In a camera-based VLC System, the captured video/images must be processed to decode the encoded data from the light blink pattern. Matlab-based digital image processing methods such as gray-scaling, histogram equalization, and high pass filters were discussed to improve signal quality in OCC System [
12]. Bummin Kim et al. [
13] provided an overview and performance evaluation of three thresholding methods, namely as Background Subtraction, Polynomial Regression, and Moving Average. The Background Subtraction method, includes masking of reference frame over current frame to identify difference in intensities. Whereas, Polynomial Regression and Moving Average thresholding method directly calculates raw intensity values. It was observed that the Background Subtraction method out performed other two techniques in terms of computational speed. These works highlighted various image processing and thresholding techniques used under OCC which inspired our proposed work.
The modulation technique is crucial in providing efficient bandwidth and data rate. Various existing modulation techniques, such as OOK, FSK, and Color Shift Keying(CSK), are modified to serve OCC-based Li-Fi systems. Thus, in a simple OOK Modulation, logic 0 means light is Off, and logic 1 means light is On. These changes in the On-Off cycle produce black and white stripes in the captured image/video under tuned conditions [
14]. However, in OCC, direct encoding data in OOK is complex due to the low frame rate of cameras and the flickering frequency of source light. Thus, the most common way to achieve OOK without flickering is to encode data bits in terms of frequencies. In paper [
15] a frequency shift-based OOK Modulation technique is implemented and evaluated. It also provides a sub-carrier frequency design based on the relationship between bit interval and sampling interval and between Sub-carrier frequencies and flickering mitigation conditions. A binary frequency shift-based OOK (BFSOOK) [
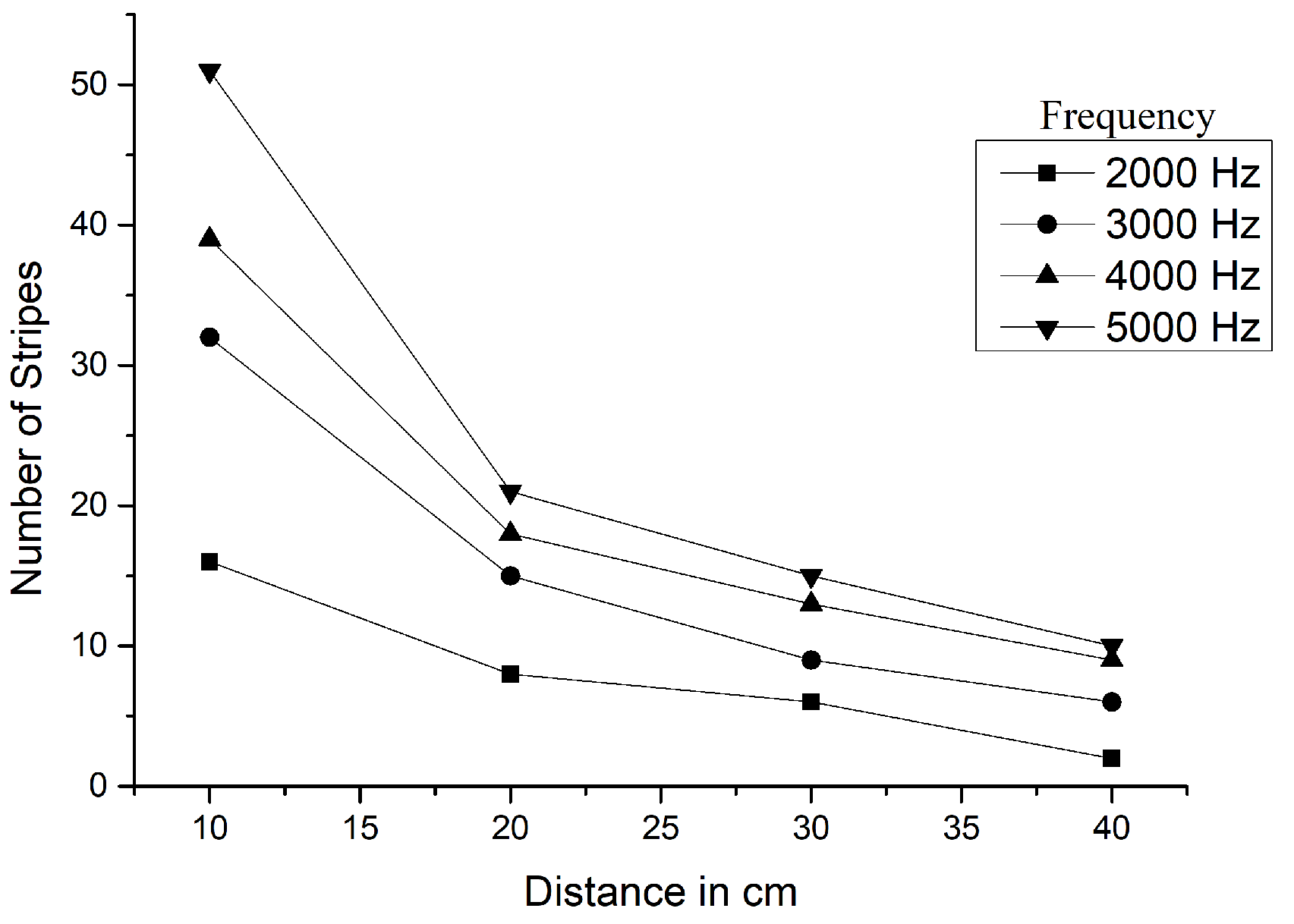
16] modulation is proposed, and experimental analysis is provided for the relation between distance and detectable stripes. The proposed system mapped each binary bit to a pair of frequencies separated by the guard band frequency, enabling the detection of data bits from the frame. In paper [
17] the OOK frequencies logic 1 and 0 are selected such that when under-sampled by a low frame rate camera, these frequencies align to low pass frequencies that can then be further decoded to the original bit values.
Modulation based on the color changes is unique to VLC and Li-Fi Systems. There are different color constellations such as 4-CSK, 8-CSK, 16-CSK depending upon the number of bits mapped to a color. An experimental demonstration of a low-cost OCC system with a 2D-constellation-assisted 4-CSK transmission scheme is proposed in paper [
18]. The system could achieve a BER of 3.8 × 10
for the distance of 0.8m and a data rate of
kb/s. A novel CSK-based OCC system is proposed in paper [
19], which uses an 8-CSK modulation pattern to obtain pixel efficiency of 3.75 pixels per bit. Here, Pixel efficiency is a performance evaluation parameter for an OCC system, which is the minimum number of pixels required to represent a bit. In paper [
20] an LED-to-camera Communication system called ColorBars is proposed, which addresses major challenges about color flicker, inter-frame data loss, and receiver diversity. It was observed that when ColorBars use lower CSK modulation, reliable communication is guaranteed due to the extremely low symbol error rate. These works aided metrics selection for performance evaluation of our proposed technique.
These works have provided us with sufficient insight and motivation to explore the OCC-based LiFi domain further. We have tried to contribute to this growing domain with our proposed testbed and modulation technique. Our work is inspired by these related works and attempts to extract, combine, and modify them to create a better solution.
3. Overview of OCC
This section highlights a few key issues and characteristics of OCC based Li-Fi system; this involves the Generic Architecture of the OCC System, Synchronization Issues, Encoding Principle, Decoding Principle, and Performance Evaluation Metrics for OCC.
3.1. Generic OCC Architecture
The
Figure 2, shows a generalized block diagram of an OCC system. The input binary data stream is passed to Optical Signal Modulator which modulates the signal using the selected technique. The modulated signal is mapped to the LED driver which is used to control the LED. The modulated signal is transmitted over a free-space optical medium. Mobile phone cameras receive the directed light as live video. The video undergoes frame sampling and thresholding to demodulate the signal and decode the received data.
3.2. Synchronization
The primary deployment of OCC based Li-Fi systems is typically in a broadcast environment. Thus, there is no feedback channel, unlike RF communication; this limits the dynamic tuning of the receiver equipment to achieve synchronization and thus restricts achieving higher data rates. If the user device starts sampling at any point during transmission, there is a possibility of losing data; this problem is called Random Sampling [
21]. On the other hand, the operational performance of each image sensor varies from product to product; this results in the problem of having different frame rates for different equipment despite the same configurations.
3.3. Encoding Principle
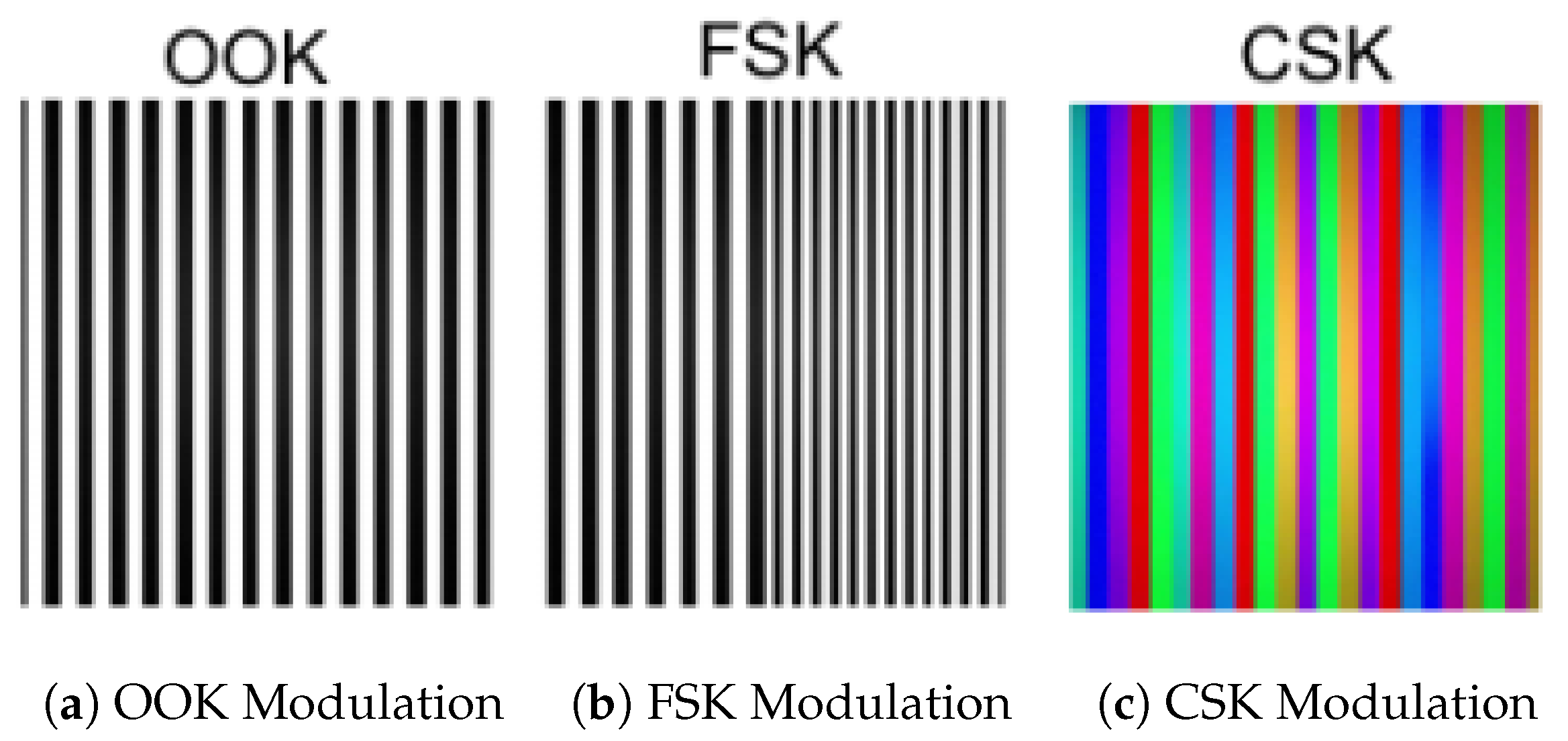
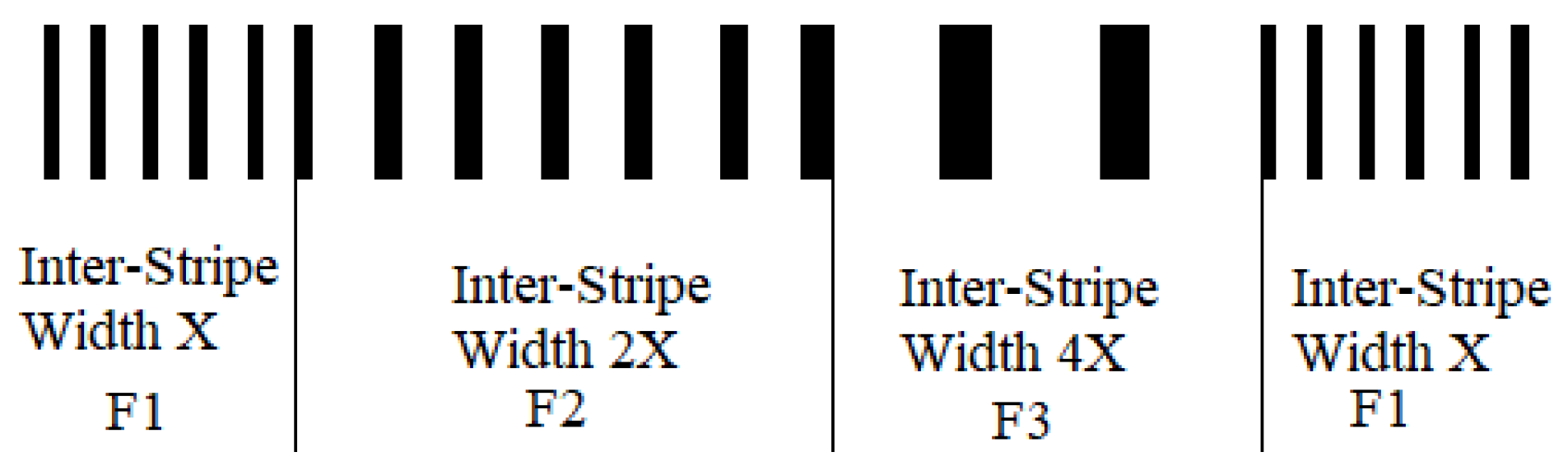
The basic encoding principle in rolling shutter-based OCC remains the same, i.e., encoding data in stripes. Thus, depending upon the modulation schemes, the properties of stripes will change. For example, in direct OOK modulation, the width of stripes will change based on the bit patterns. Whereas for FSK, the modulated output would vary in the number of stripes, and for CSK, it would be colored bands. Although the number of stripes required to represent a bit determines the efficiency of the modulation technique, it is also dependent on the size of the transmitter [
22].
Figure 3 shows sample frames from each modulation scheme. In FSK, the data is transmitted by modulating the signals in-terms of shifting frequencies, while in Pulse Duration Modulation(PDM), it is transmitted by changing the duration of pulse. The proposed modulation technique combine these two techniques to transmit the data by modulating duration of frequencies.
3.4. Decoding Principle
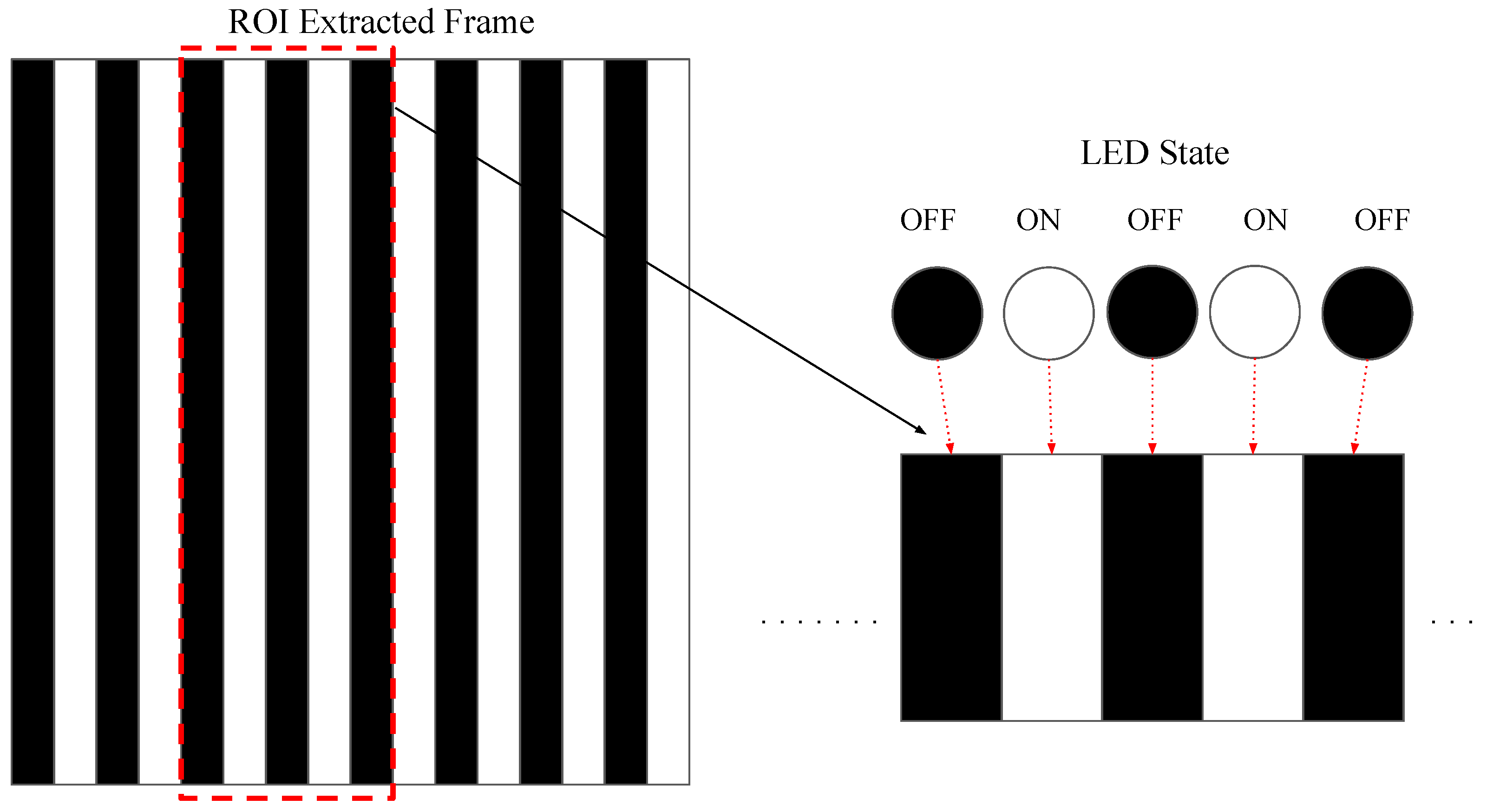
An image sensor is built with pixel arrays and a built-in read-out circuit. Each pixel of an image sensor acts as a photodetector. Depending upon the type of camera, these arrays are activated either at once or one by one; this is the basic working principle of the global shutter and rolling shutter. The pixels are activated together in the global shutter, whereas pixels are activated in succession in the rolling shutter. Rolling shutter enables capturing of LED states at different pixels resulting in a series of stripes as shown in
Figure 4.
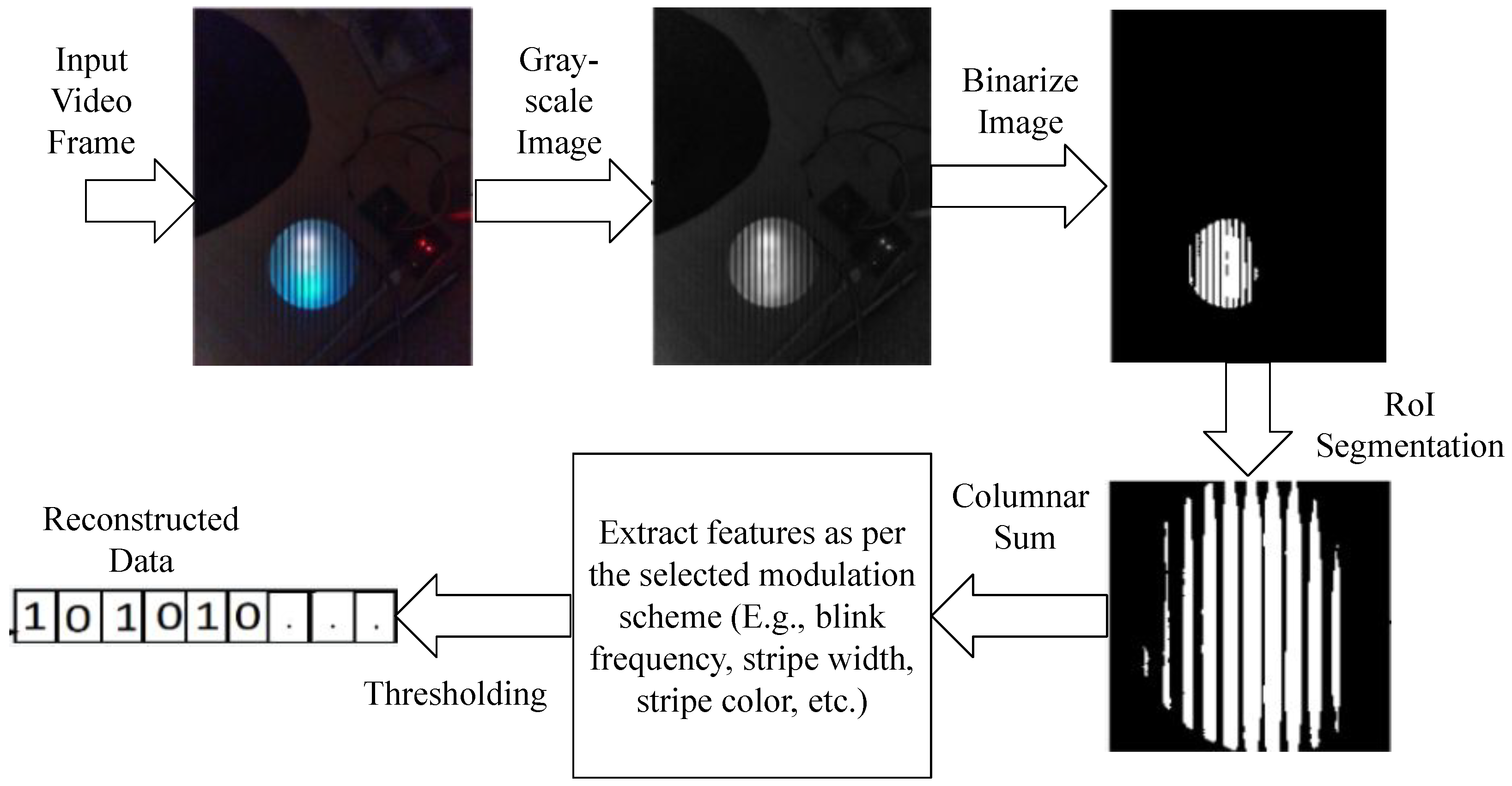
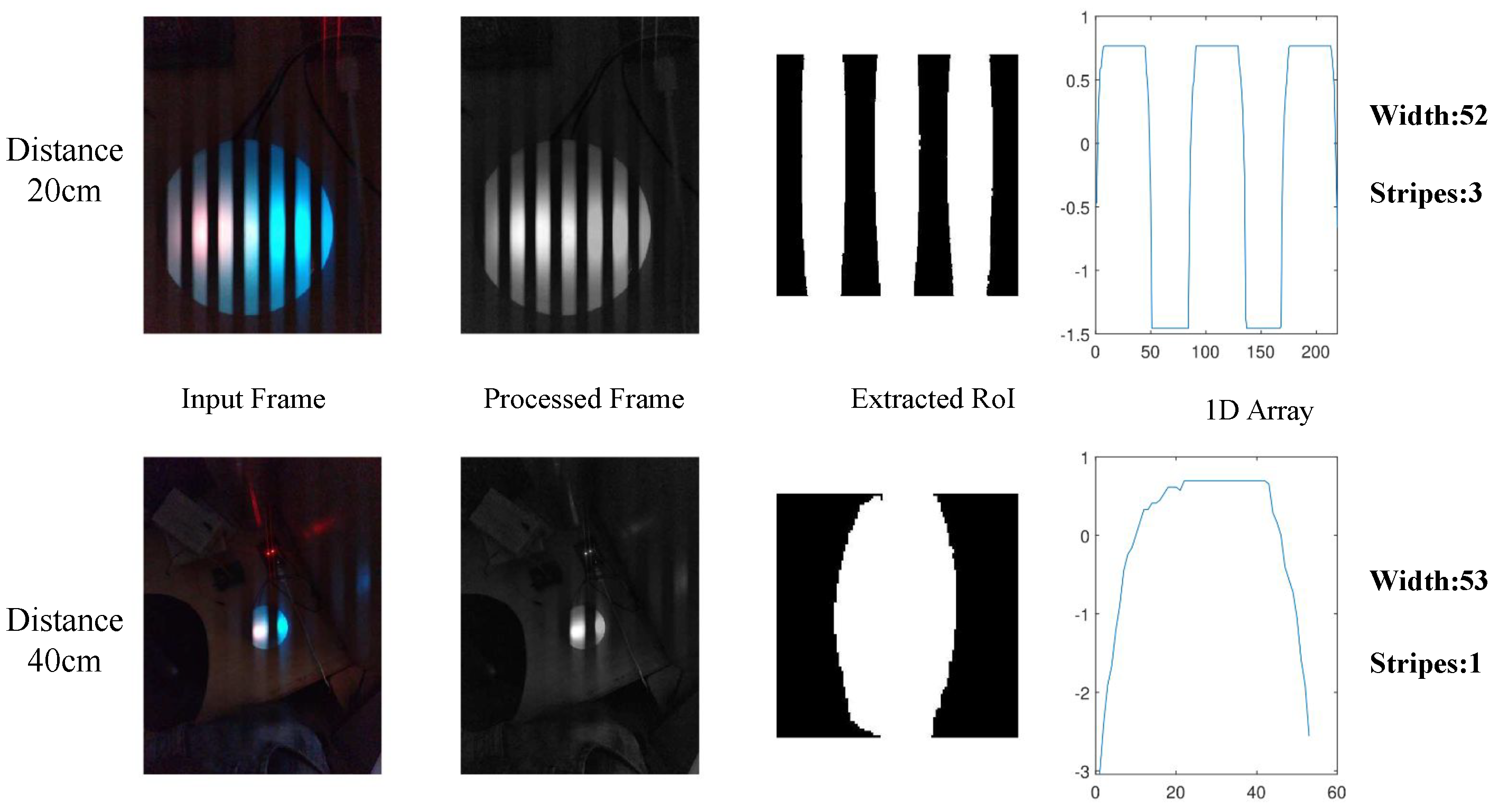
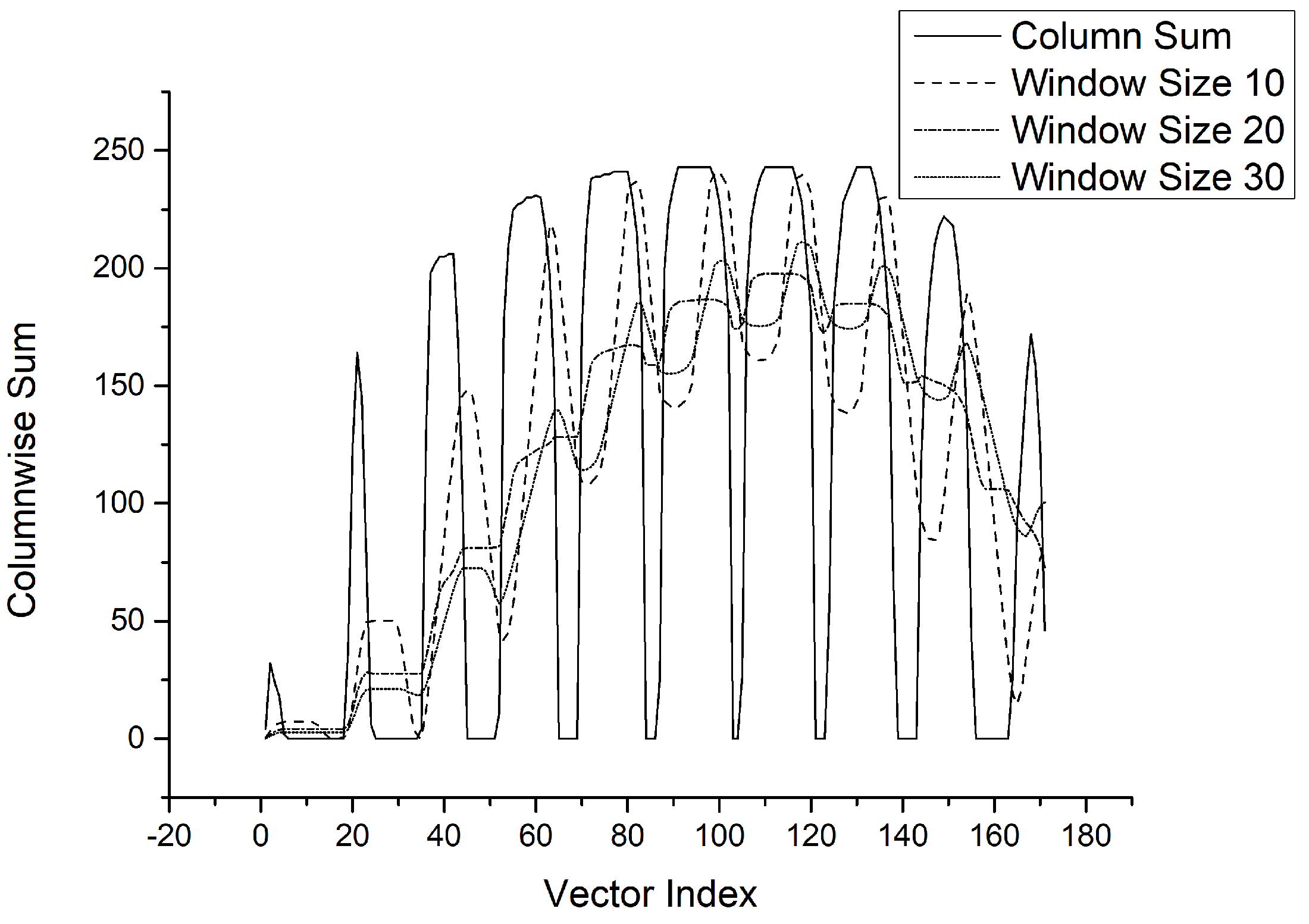
The transmitted bits are decoded using image-processing techniques as shown in
Figure 5. The first step is detecting and tracking the transmitter from video frames using computer vision algorithms to identify the Region of Interest (RoI). The RoI from the image is cropped and resized to obtain an image containing stripes. The cropped RoI further undergoes pre-processing to obtain a 2D signal using thresholding and decoding techniques. The decoded binary bits are used to reconstruct sent data. Details on this process are discussed in
Section 4.
3.5. Performance Evaluation Metrics
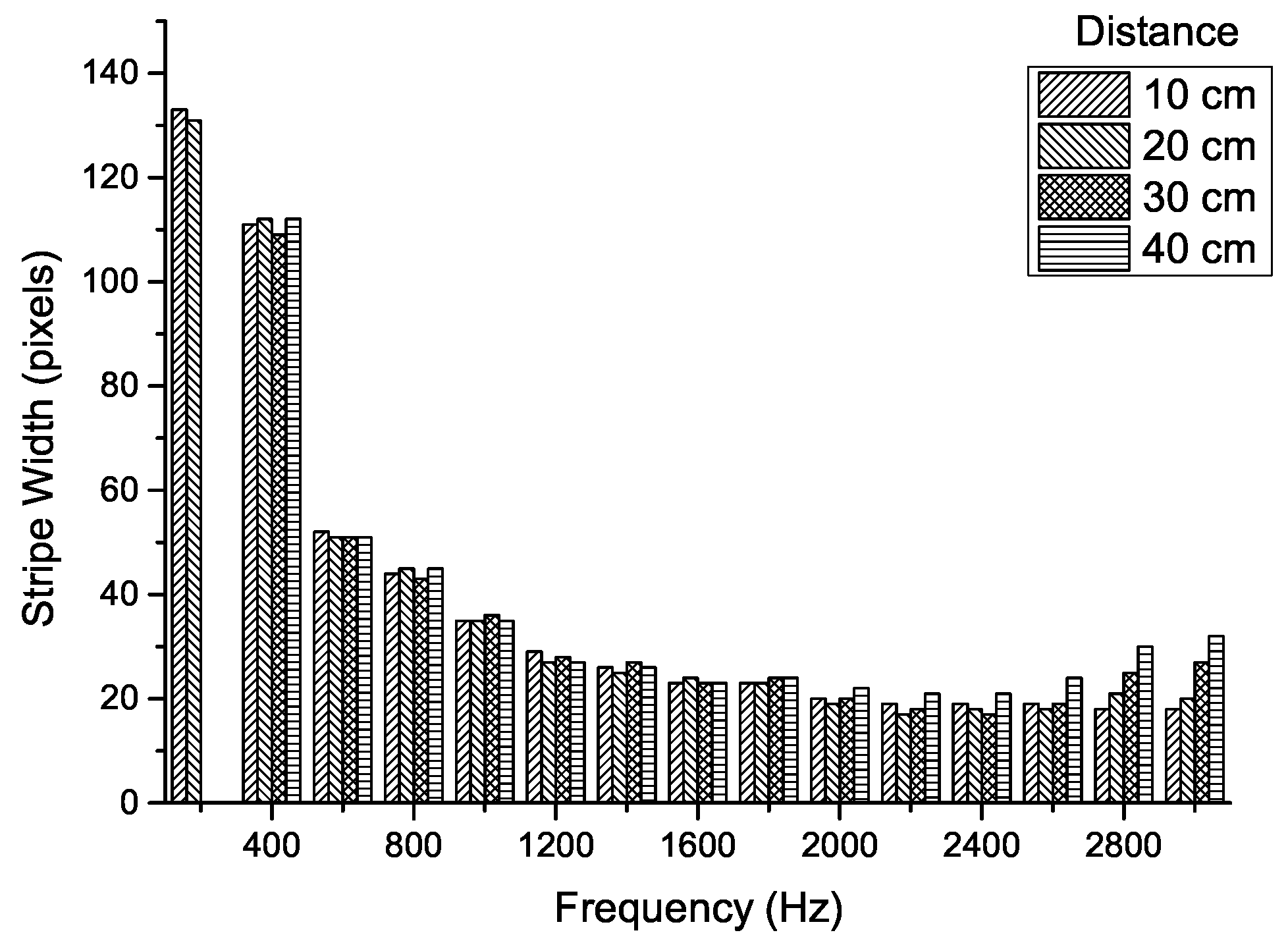
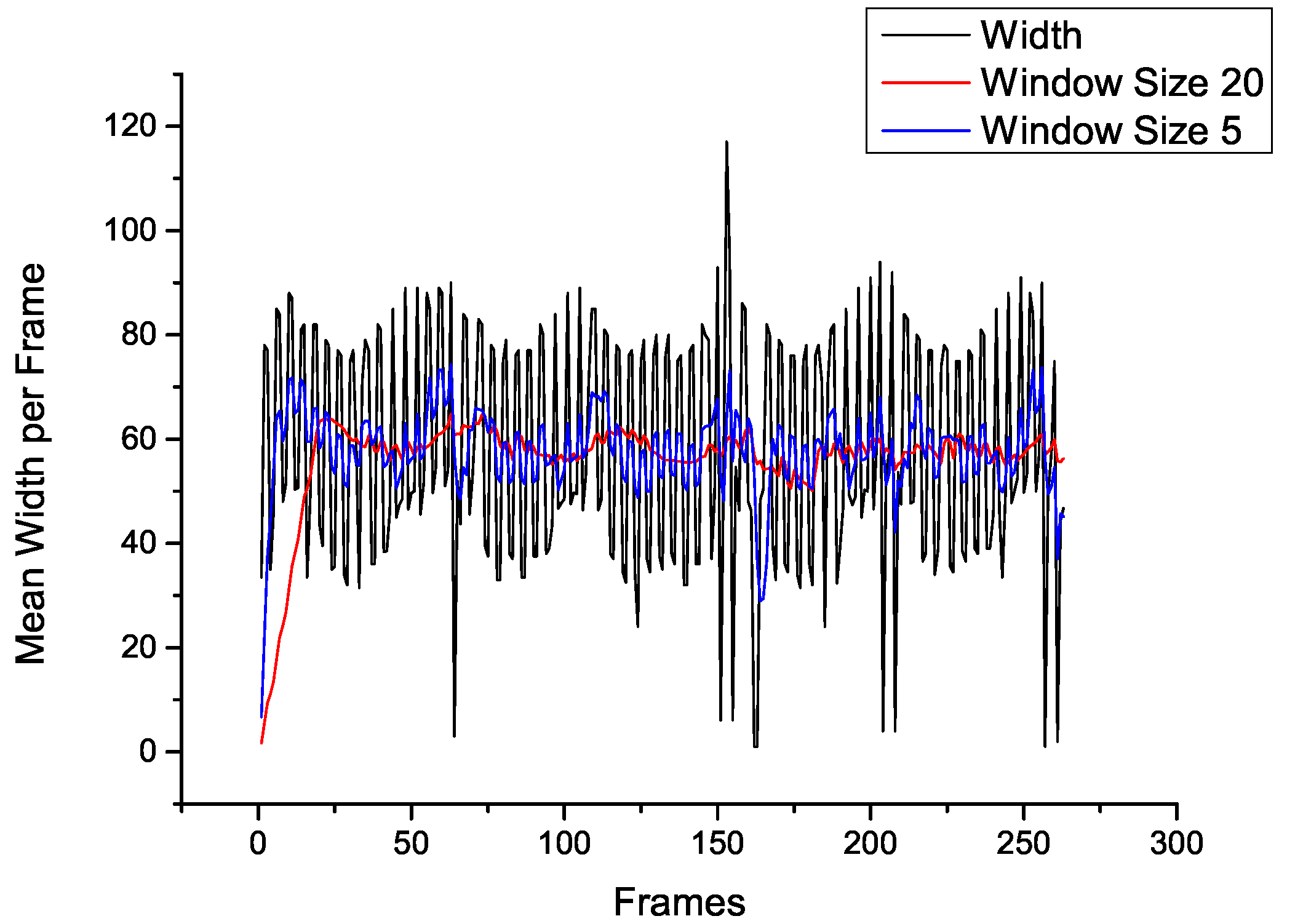
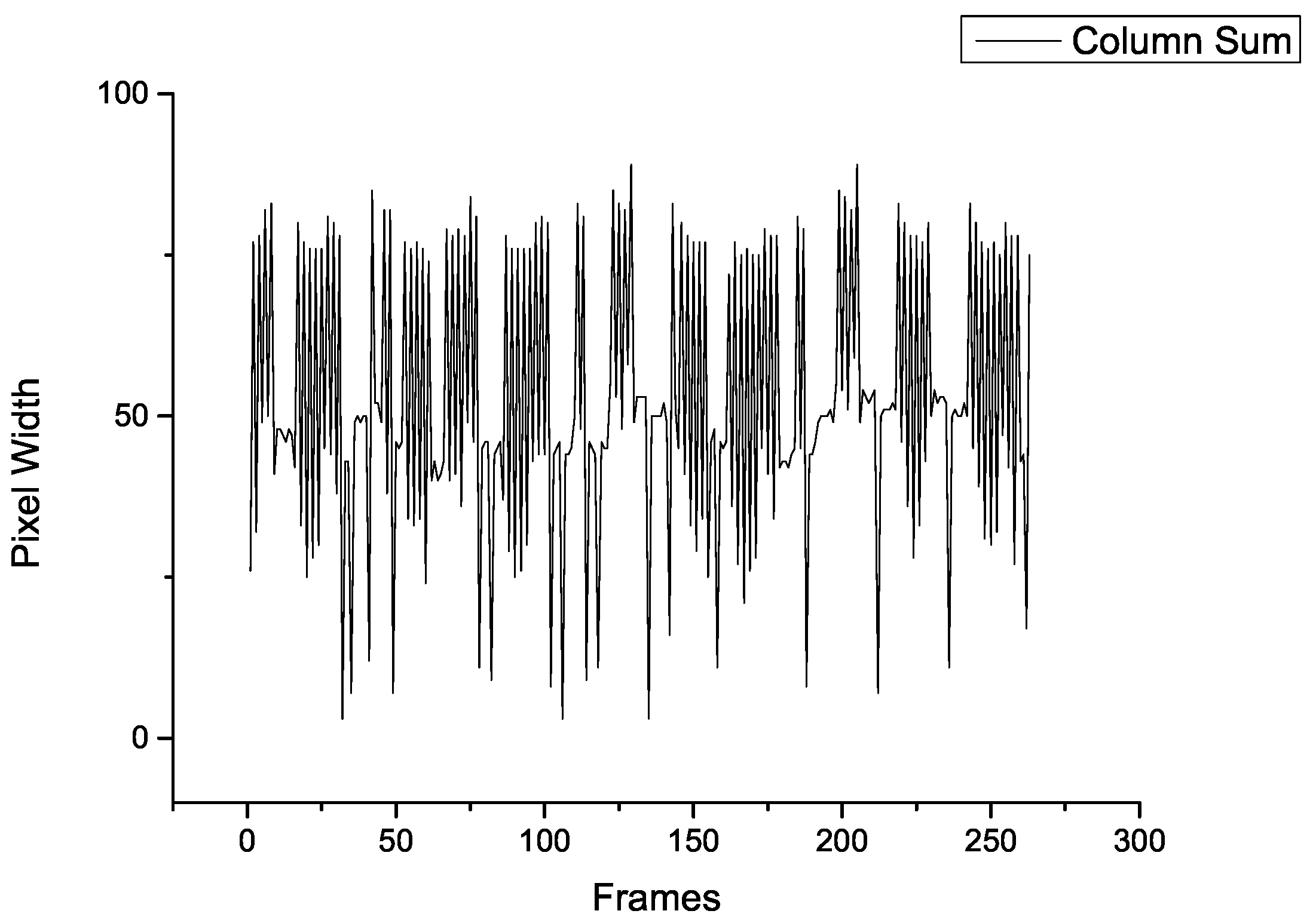
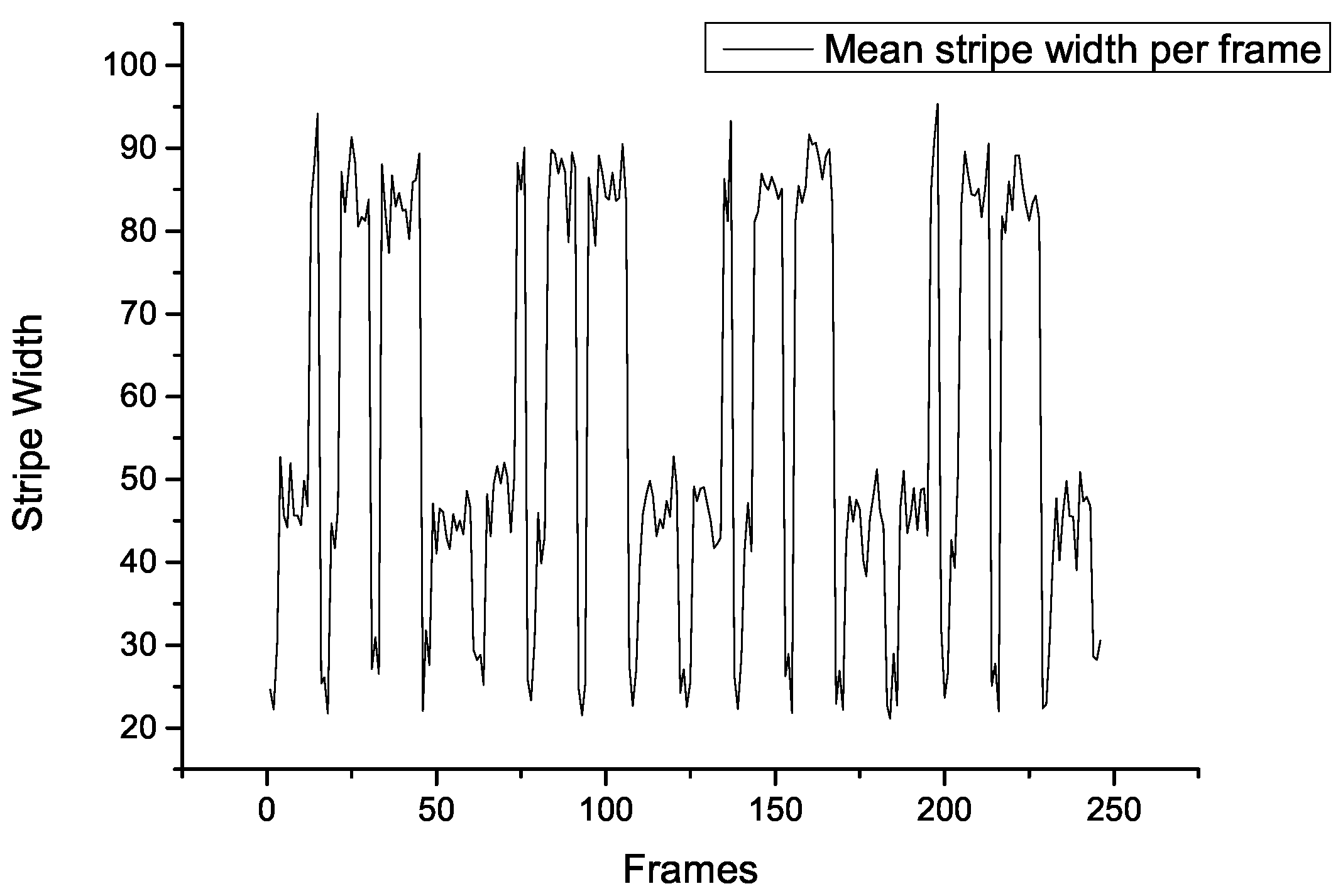
In an OCC based Li-Fi system, the number of frames required to represent a bit is the crucial factor in determining the modulation techniques’ efficiency. In a typical OCC based Li-Fi system using OOK modulation, the encoded bits are observed as stripes in the image at the receiver side. Thus, the more the stripes in the image, the more bits can be encoded. However, the width of these stripes is proportional to the LED transmitter’s symbol rate. Thus, for a higher symbol rate, the corresponding bit rate will be higher, which results in an increase in number of bits per second. Each bit is represented with the smaller duration of on-off cycles causing the stripe width to become thinner. However, due to the pixel bleeding effect, the image becomes blurred and the width of the stripes becomes difficult to decode. On the other hand, if the stripe width is wider, the number of bits recovered could be less. Hence, there must be a balance between bit representation, modulation technique, image processing, and size of transmitter.
In addition to Signal-to-Noise Ratio(SNR) and Bit Error Ratio (BER), frames-per-bit [
7] metric will also be used to evaluate the performance of the proposed modulation technique. SNR under various ambient lighting conditions and distances will be recorded. To measure SNR the ratio of overall pixel intensity of the image before transmission and during transmission will be estimated.
7. Conclusions
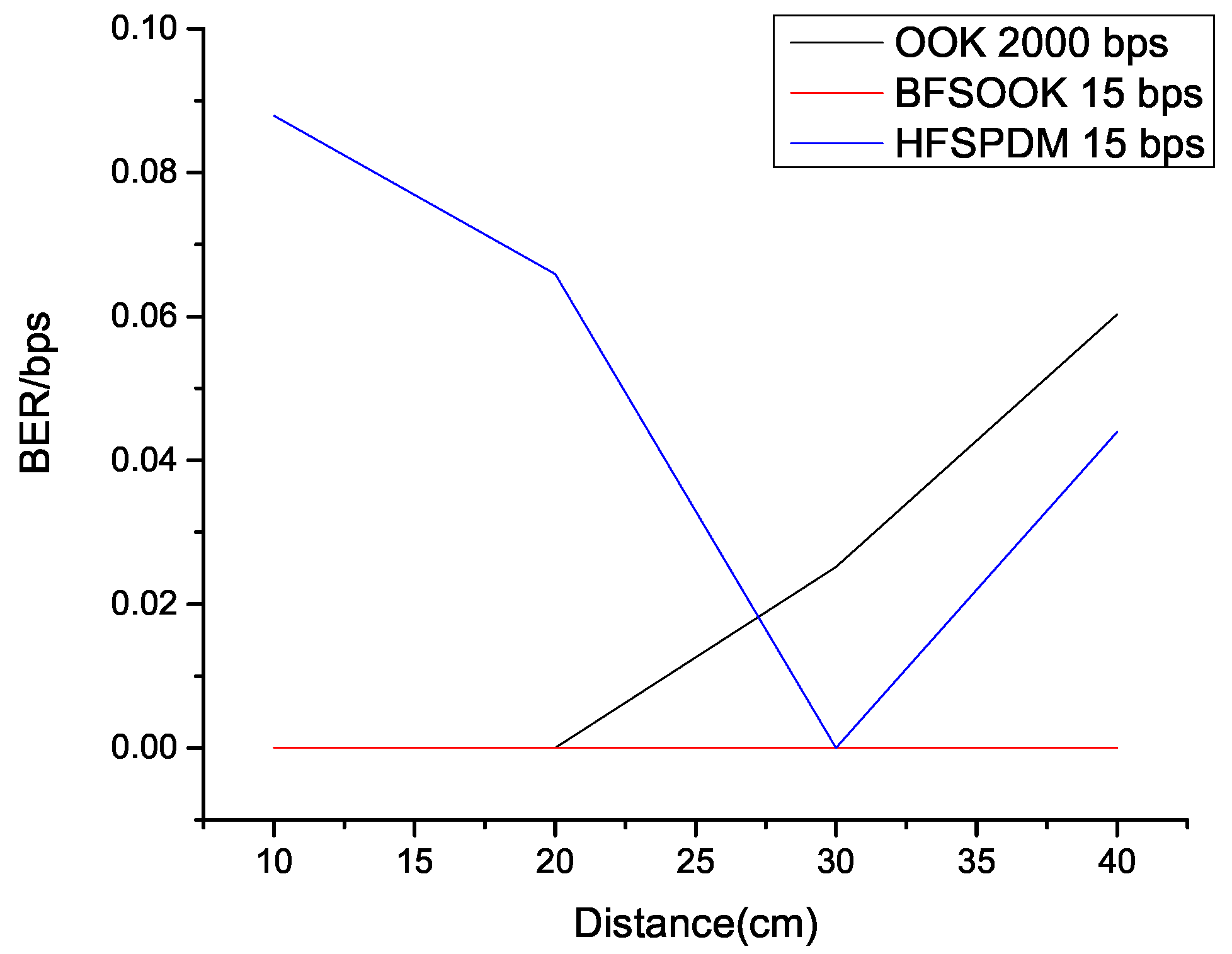
In this paper, a novel technique called Hybrid Frequency Shift-Pulse Width Modulation (HFSPDM) was proposed and implemented on an in-house Li-Fi testbed. The other two modulation techniques, OOK and BFSOOK, were implemented on the same testbed to compare their performances. The best results for each technique were compared. It was observed that BFSOOK provided consistent BER/bps of close to 0 for a frequency 200 Hz while our proposed HFSPDM technique has shown BER/bps closer to 0.04. It was also observed that in HFSPDM, the number of frames required to transmit the same amount of data as that in BFSOOK was considerably lesser but more than OOK; this is due to the fact that HFSPDM represents, on average, 2 bits per 5 frames, whereas BFSOOK represents 1 bit per 3 frames. The bit-to-frame ratio is higher in terms of OOK; however, HFSPDM gives better BER for longer distances than OOK as OOK is more sensitive to noise. Thus, it can be concluded that HFSPDM can be used in OCC applications that require low computation and high accuracy for comparatively longer distances.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



