
Preprocessing of Gravity Data


Abstract
:1. Introduction
2. Time Series Analysis of Gravity Data
3. Abrupt Error Identifying
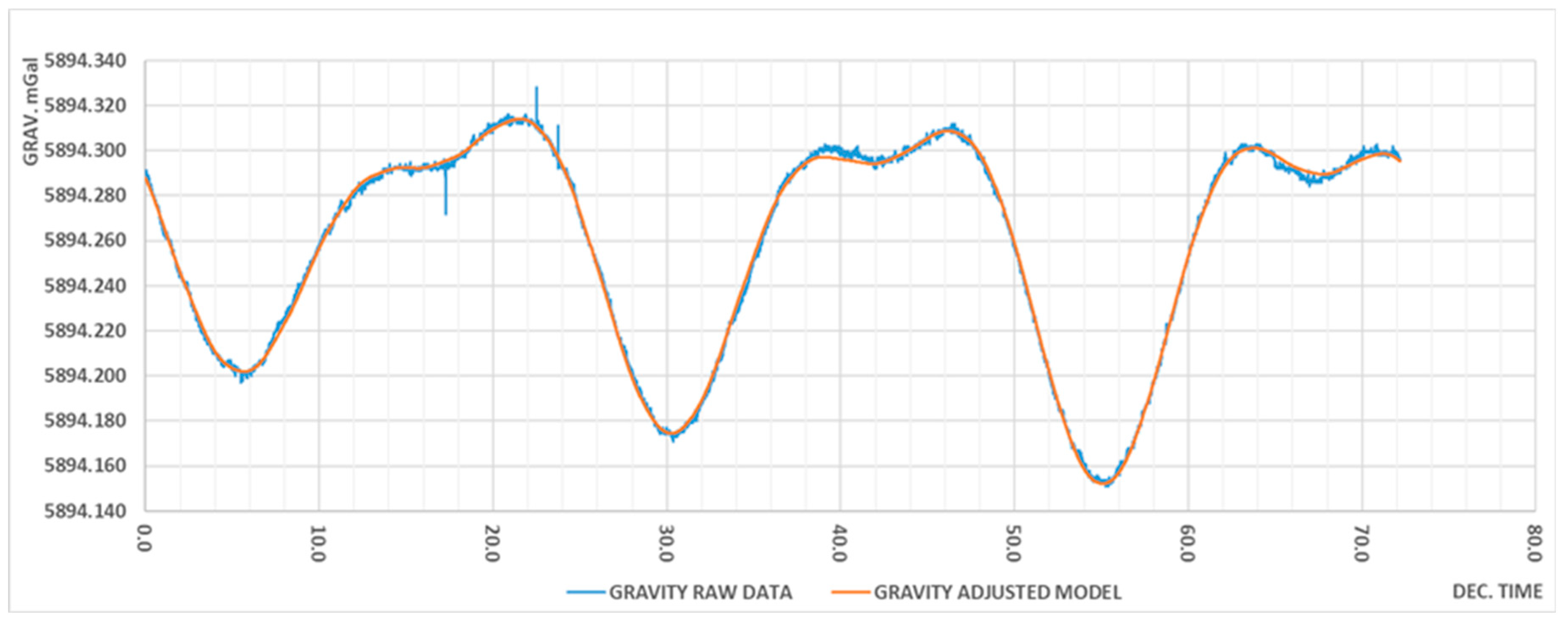
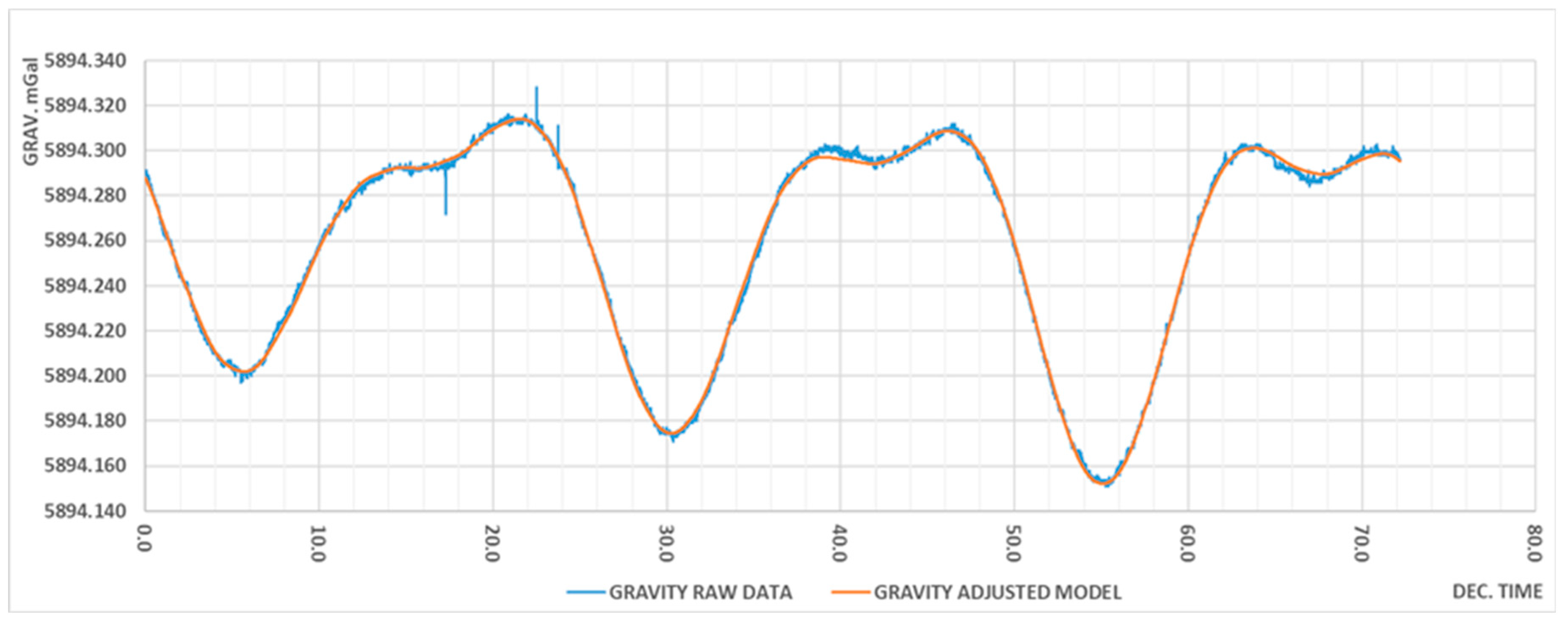
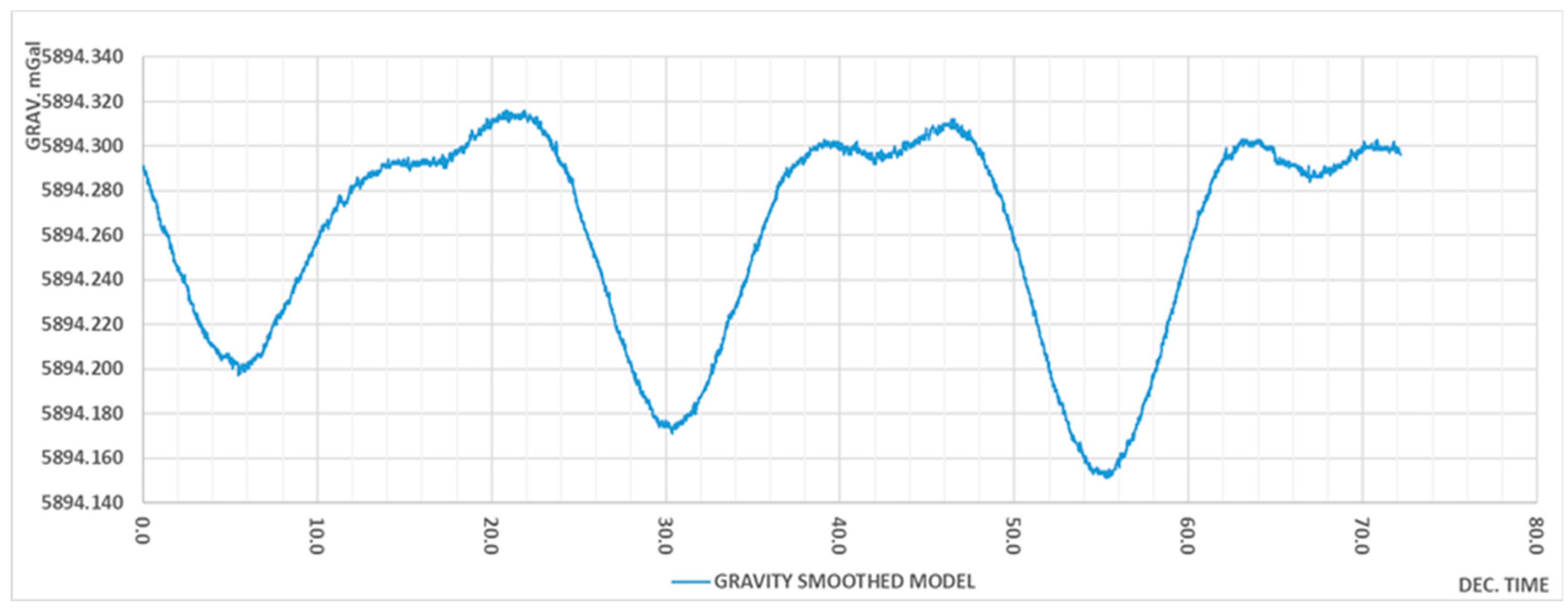
4. Regression Function as the Smoothing and Estimating Function
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Torge, W. Gravimetry; Walter de Gruyter: Berlin, Germany; New York, NY, USA, 1989; 465p, ISBN 3110107023. [Google Scholar]
- Lederer, M. Accuracy of the relative gravity measurements. Acta Geodyn. Geomater. 2009, 6, 383–390. [Google Scholar]
- Anderson, O.D. Time series analysis and forecasting: Another look at the Box-Jenkins approach. J. R. Stat. Soc. 1977, 26, 285–303. Available online: https://www.jstor.org/stable/2987813 (accessed on 1 January 2020). [CrossRef]
- Kendall, M.; Stuart, A. The Advanced Theory of Statistics—Volume 2: Inference and Relationship; Charles Griffin & Co. Limited: London, UK, 1979; 736p. [Google Scholar]
- Box, G.E.P.; Jenkins, G.M.; Reinsel, G.C. Time Series Analysis, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2008; 746p, ISBN 9781118619193. [Google Scholar]
- Brockwell, P.J.; Davis, R.A. Time-Series: Theory and Methods; eBook; Springer: Berlin, Germany, 1991; 577p, ISBN 978-1-4419-0320-4. [Google Scholar]
- Montgomery, D.C. Design and Analysis of Experiments, 8th ed.; John Wiley & Sons: New York, NY, USA, 2013; 724p. [Google Scholar]
- Chatfield, C. The Analysis of Time Series—An Introduction, 5th ed.; Chapman and Hall CRC: London, UK, 2003; 352p. [Google Scholar]
- e-Handbook of Statistical Methods, NIST/SEMATECH. 2012. Available online: http://www.itl.nist.gov/div898/handbook/ (accessed on 24 April 2012).
- Hunter, J.S. The Exponentially weighted moving average. J. Qual. Technol. 2018, 18, 203–210. [Google Scholar] [CrossRef]
- El-Habiby, M.; Sideris, M.G. On the Potential of Wavelets for Filtering and Thresholding Airborne Gravity Data; The University of Calgary, 2500 University Drive, N.W.: Calgary, AB, Canada. Available online: https://www.isgeoid.polimi.it/Newton/Newton_3/El-Habiby.pdf (accessed on 21 January 2006).
- Zhao, L.; Wu, M.; Forsberg, R.; Olesen, A.V.; Zhang, K.; Caou, J. Airborne Gravity Data Denoising Based on Empirical Mode Decomposition: A Case Study for SGA-WZ Greenland Test Data. ISPRS Int. J. Geo-Inf. 2015, 4, 2205–2218. [Google Scholar] [CrossRef] [Green Version]
- Scintrex. CG-5 Operational Manual; Scintrex System—Part #867700 Revision 8; Scintrex: Concord, ON, Canada, 2012. [Google Scholar]
- Vanicek, P. The Earth Tides; Lecture Notes No. 36; University of New Brunswick: Fredericton, NB, Canada, 1973; p. 38. [Google Scholar]
- Torge, W.; Jürgen, M. Geodesy; De Gruyter: Berlin, Germany, 2012; 433p, ISBN 978-3-11-020718-7. [Google Scholar]
- Wellenhof, B.H.; Moritz, H. Physical Geodesy; Springer: Vienna, Austria; New York, NY, USA, 2006; 403p, ISBN 10 3-211-33544-7. [Google Scholar]


{kind=link}
{kind=link}
| DAY | RAW GRAV. | MA | CMA | CuMA | MM | SMOOTHED GRAV. |
|---|---|---|---|---|---|---|
| 0.7192 | 5894.2870 | 5894.2900 | 5894.2920 | 5894.2530 | 5894.2900 | 5894.2870 |
| 0.7200 | 5894.2720 | 5894.2830 | 5894.2530 | 5894.2870 | 5894.2910 | |
| 0.7207 | 5894.2930 | 5894.2840 | 5894.2860 | 5894.2530 | 5894.2870 | 5894.2930 |
| 0.7215 | 5894.2950 | 5894.2870 | 5894.2530 | 5894.2930 | 5894.2950 | |
| 0.7222 | 5894.2940 | 5894.2940 | 5894.2880 | 5894.2530 | 5894.2940 | 5894.2940 |
| 0.9374 | 5894.3100 | 5894.3100 | 5894.3110 | 5894.2660 | 5894.3100 | 5894.3100 |
| 0.9381 | 5894.3280 | 5894.3160 | 5894.2660 | 5894.3110 | 5894.3140 | |
| 0.9389 | 5894.3100 | 5894.3160 | 5894.3150 | 5894.2660 | 5894.3100 | 5894.3100 |
| 0.9396 | 5894.3110 | 5894.3160 | 5894.2660 | 5894.3110 | 5894.3110 | |
| 0.9404 | 5894.3110 | 5894.3110 | 5894.3150 | 5894.2660 | 5894.3110 | 5894.3110 |
| 0.9885 | 5894.3020 | 5894.2980 | 5894.2970 | 5894.2680 | 5894.2960 | 5894.3020 |
| 0.9893 | 5894.3110 | 5894.3030 | 5894.2680 | 5894.3020 | 5894.3010 | |
| 0.9900 | 5894.2920 | 5894.3020 | 5894.3010 | 5894.2680 | 5894.3020 | 5894.3010 |
| 0.9908 | 5894.2950 | 5894.2990 | 5894.2680 | 5894.2950 | 5894.3010 | |
| 0.9916 | 5894.2950 | 5894.2940 | 5894.2990 | 5894.2680 | 5894.2950 | 5894.3000 |
| Mean square error in mGal | 0.0009 | 0.0011 | 0.0468 | 0.001 | 0.0027 | |
| DAY | RAW GRAV. | eMA | eCMA | eCuMA | eMM | eSMOOTH |
|---|---|---|---|---|---|---|
| 0.7192 | 5894.2870 | −0.0039 | −0.0049 | 0.0338 | −0.003 | −0.0039 |
| 0.7200 | 5894.2720 | −0.0189 | 0.0188 | −0.015 | −0.0189 | |
| 0.7207 | 5894.2930 | 0.0020 | 0.0075 | 0.0397 | 0.0060 | 0.0020 |
| 0.7215 | 5894.2950 | 0.0039 | 0.0417 | 0.0020 | 0.0039 | |
| 0.7222 | 5894.2940 | 0.0029 | 0.0064 | 0.0407 | 0.0000 | 0.0029 |
| 0.9374 | 5894.3100 | −0.0043 | −0.0005 | 0.0443 | 0.0000 | −0.0043 |
| 0.9381 | 5894.3280 | 0.0138 | 0.0623 | 0.0170 | 0.0138 | |
| 0.9389 | 5894.3100 | −0.004 | −0.0048 | 0.0442 | 0.0000 | −0.004 |
| 0.9396 | 5894.3110 | −0.0029 | 0.0452 | 0.0000 | −0.0029 | |
| 0.9404 | 5894.3110 | −0.0028 | −0.0039 | 0.0452 | 0.0000 | −0.0028 |
| 0.9885 | 5894.3020 | 0.0006 | 0.0048 | 0.0343 | 0.0060 | 0.0006 |
| 0.9893 | 5894.3110 | 0.0099 | 0.0433 | 0.0090 | 0.0099 | |
| 0.9900 | 5894.2920 | −0.0088 | −0.0087 | 0.0242 | −0.01 | −0.0088 |
| 0.9908 | 5894.2950 | −0.0056 | 0.0272 | 0.0000 | −0.0056 | |
| 0.9916 | 5894.2950 | −0.0053 | −0.0041 | 0.0272 | 0.0000 | −0.0053 |
| ∆g | g1 | g2 | g3 | a | b | c | d | A | p |
| 5894.269 | −0.000193 | −0.000004 | 0.000000 | −0.004785 | −0.028121 | −0.013337 | 0.021867 | 0.028525 | 1.402253 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Izvoltova, J.; Bacova, D.; Chromcak, J.; Hodas, S. Preprocessing of Gravity Data. Computation 2022, 10, 82. https://doi.org/10.3390/computation10060082
Izvoltova J, Bacova D, Chromcak J, Hodas S. Preprocessing of Gravity Data. Computation. 2022; 10(6):82. https://doi.org/10.3390/computation10060082
Chicago/Turabian StyleIzvoltova, Jana, Dasa Bacova, Jakub Chromcak, and Stanislav Hodas. 2022. "Preprocessing of Gravity Data" Computation 10, no. 6: 82. https://doi.org/10.3390/computation10060082
APA StyleIzvoltova, J., Bacova, D., Chromcak, J., & Hodas, S. (2022). Preprocessing of Gravity Data. Computation, 10(6), 82. https://doi.org/10.3390/computation10060082