
Classifying the Degree of Bark Beetle-Induced Damage on Fir (Abies mariesii) Forests, from UAV-Acquired RGB Images

 , ,
, ,  and
and
Abstract
:1. Introduction
2. Material and Methods
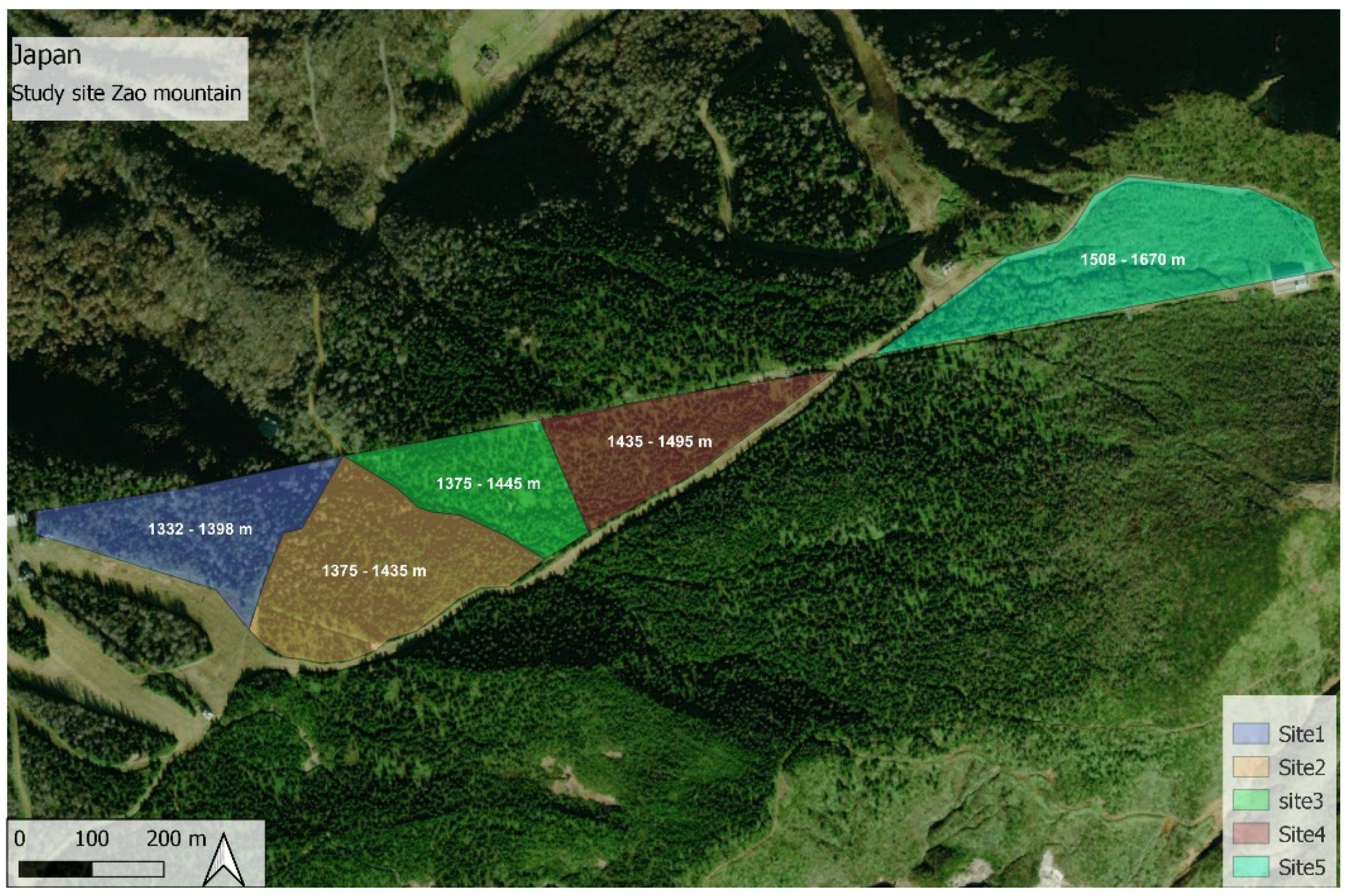
2.1. Study Site
2.2. Data Acquisition
2.3. Data and Programs
2.4. Definition of Tree Health Category
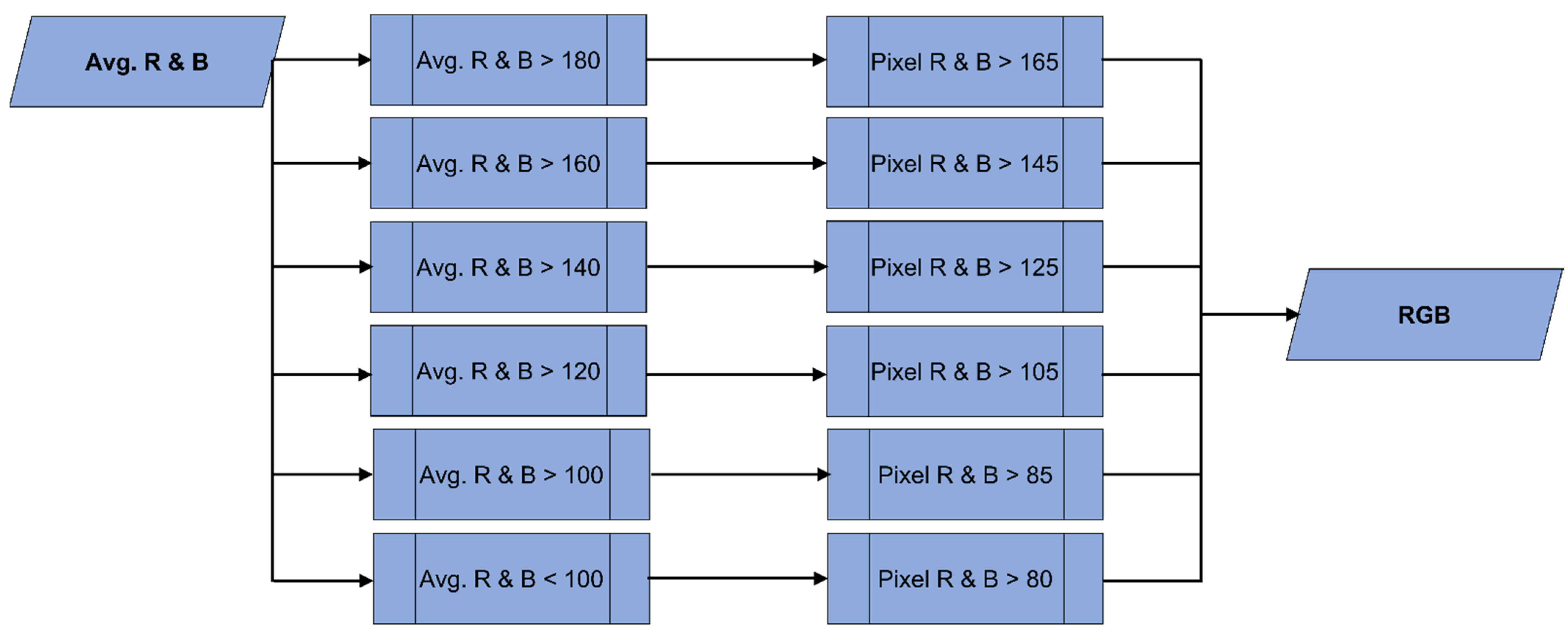
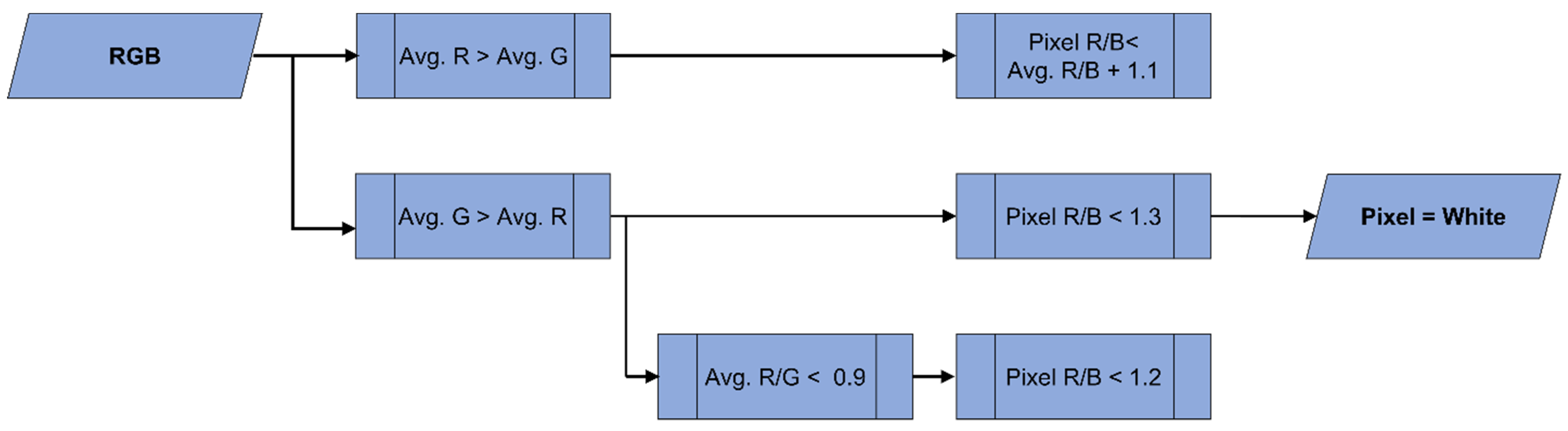
2.5. Calculation of Whiteness
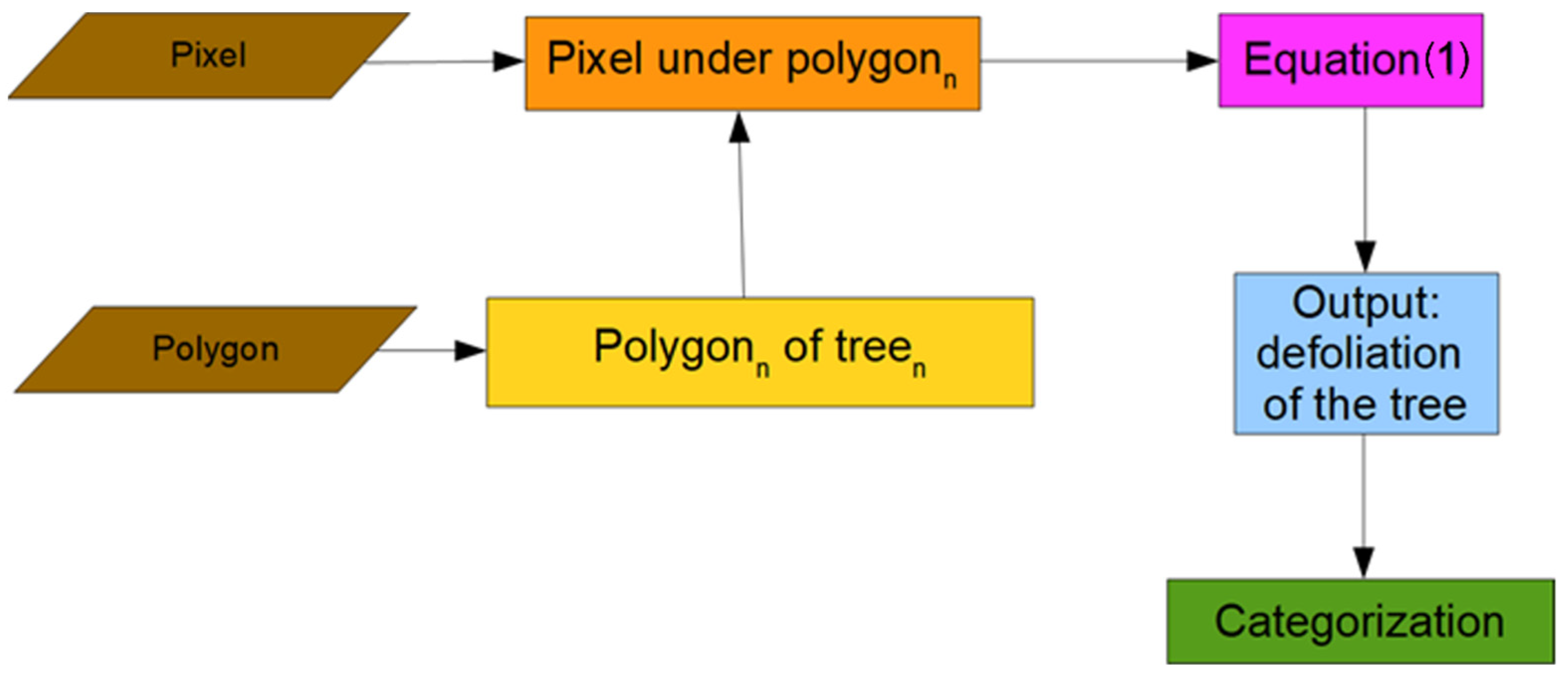
2.6. Polygon Definition
3. Results
4. Discussion
Considerations When Using the Model
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bonan, G.B. Forests and climate change: Forcings, feedbacks, and the climate benefits of forests. Science 2008, 320, 1444–1449. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Klouscek, T.; Komárek, J.; Surový, P.; Hrach, K.; Janata, P.; Vašícek, B. The Use of UAV Mounted Sensors for Precise Detection of Bark Beetle Infestation. Remote Sens. 2019, 11, 1561. [Google Scholar] [CrossRef] [Green Version]
- Coulson, R.N.; McFadden, B.A.; Pulley, P.E.; Lovelady, C.N.; Fitzgerald, J.W.; Jack, S.B. Heterogeneity of forest landscapes and the distribution and abundance of the southern pine beetle. For. Ecol. Manag. 1999, 114, 471–485. [Google Scholar] [CrossRef]
- Schroeder, L.M.; Weslien, J.; Lindelow, A.; Lindhe, A. Attacks by bark- and wood-boring Coleoptera on mechanically created high stumps of Norway spruce in the two years following cutting. For. Ecol. Manag. 1999, 123, 21–30. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; Latifi, H.; Ghosh, A.; Joshi, P.K.; Koch, B. Assessing the potential of hyperspectral imagery to map bark beetle-induced tree mortality. Remote Sens. Environ. 2014, 140, 533–548. [Google Scholar] [CrossRef]
- Bright, B.C.; Hudak, A.T.; Kennedy, R.E.; Meddens, A.J.H. Landsat time series and lidar as predictors of live and dead basal area across five bark beetle-affected forests. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3440–3452. [Google Scholar] [CrossRef]
- Müller, J.; Bußler, H.; Goßner, M.; Rettelbach, T.; Duelli, P. The European spruce bark beetle Ips typographus in a national park: From pest to keystone species. Biodivers. Conserv. 2008, 17, 2979–3001. [Google Scholar] [CrossRef]
- Lausch, A.; Fahse, L.; Heurich, M. Factors affecting the spatio-temporal dispersion of Ips typographus (L.) in Bavarian Forest National Park: A long-term quantitative landscape-level analysis. For. Ecol. Manag. 2010, 261, 233–245. [Google Scholar] [CrossRef]
- Kuznetsov, V.; Sinev, S.; Yu, C.; Lvovsky, A. Key to Insects of the Russian Far East (In 6 Volumes). Volume 5. Trichoptera and Lepidoptera. Part 3. Available online: https://www.rfbr.ru/rffi/ru/books/o_66092 (accessed on 15 December 2021).
- Nguyen, H.T.; Lopez, C.M.L.; Moritake, K.; Kentsch, S.; Shu, H.; Diez, Y. Sick Fir Tree (Abies mariesii) Identification in Insect Infested Forests by Means of UAV Images and Deep Learning. Remote Sens. 2021, 13, 260. [Google Scholar] [CrossRef]
- Meddens, A.J.H.; Hicke, J.A.; Vierling, L.A. Evaluating the potential of multispectral imagery to map multiple stages of tree mortality. Remote Sens. Environ. 2011, 115, 1632–1642. [Google Scholar] [CrossRef]
- Senf, C.; Seidl, R.; Hostert, P. Remote sensing of forest disturbances: Current state and future directions. Int. J. Appl. Earth Obs. Geoinf. 2017, 60, 49–60. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Meigs, G.W.; Kennedy, R.E.; Gray, A.N.; Gregory, M.J. Spatiotemporal dynamics of recent mountain pine beetle and western spruce budworm outbreaks across the Pacific Northwest Region, USA. For. Ecol. Manag. 2015, 339, 71–86. [Google Scholar] [CrossRef] [Green Version]
- Krivets, S.A.; Kerchev, I.A.; Bisirova, E.M.; Pashenova, N.V.; Demidko, D.A.; Petko, V.M.; Baranchikov, Y.N. Four-Eyed Fir Bark Beetle in Siberian Forests (Distribution, Biology, Ecology, Detection and Survey of Damaged Stands); UM IUM: Krasnoyarsk, Russia, 2015. [Google Scholar]
- Ferracini, C.; Saitta, V.; Pogolotti, C.; Rollet, I.; Vertui, F.; Dovigo, L. Monitoring and Management of the Pine Processionary Moth in the North-Western Italian Alps. Forests 2021, 11, 1253. [Google Scholar] [CrossRef]
- Nasi, R.; Honkavaara, E.; Lyytikainen-Saarenmaa, P.; Blomqvist, M.; Litkey, P.; Hakala, T.; Vilja-nen, N.; Kantola, T.; Tanhuanpaa, T.; Holopainen, M. Using UAV-based photogrammetry and hyperspectral imaging for mapping bark beetle damage at tree level. Remote Sens. 2015, 7, 15467–15493. [Google Scholar] [CrossRef] [Green Version]
- Capolupo, A.; Kooistra, L.; Berendonk, C.; Boccia, L.; Suomalainen, J. Estimating Plant Traits of Grasslands from UAV-Acquired Hyperspectral Images: A Comparison of Statistical Approaches. ISPRS Int. J. Geo-Inf. 2015, 4, 2792–2820. [Google Scholar] [CrossRef]
- Safonova, A.; Tabik, S.; Alcaraz-Segura, D.; Rubtsov, A.; Maglinets, Y.; Herrera, F. Detection of Fir Trees (Abies sibirica) Damaged by the Bark Beetle in Unmanned Aerial Vehicle Images with Deep Learning. Remote Sens. 2019, 11, 643. [Google Scholar] [CrossRef] [Green Version]
- Heurich, M.; Ochs, T.; Andresen, T.; Schneider, T. Object-orientated image analysis for the semi-automatic detection of dead trees following a spruce bark beetle (Ips typographus) outbreak. Eur. J. For. Res. 2009, 129, 313–324. [Google Scholar] [CrossRef]
- Albarracín, J.F.H.; Oliveira, R.S.; Hirota, M.; dos Santos, J.A.; Torres, R.d.S. A Soft Computing Approach for Selecting and Combining Spectral Bands. Remote Sens. 2020, 12, 2267. [Google Scholar] [CrossRef]
- Pham, Q.B.; Mohammadpour, R.; Linh, N.T.T.; Mohajane, M.; Pourjasem, A.; Sammen, S.S.; Anh, D.T.; Nam, V.T. Application of soft computing to predict water quality in wetland. Environ. Sci. Pollut. Res. Int. 2021, 28, 185–200. [Google Scholar] [CrossRef]
- Kentsch, S.; Cabezas, M.; Tomhave, L.; Groß, J.; Burkhard, B.; Lopez Caceres, M.L.; Waki, K.; Diez, Y. Analysis of UAV-Acquired Wetland Orthomosaics Using GIS, Computer Vision, Computational Topology and Deep Learning. Sensors 2021, 21, 471. [Google Scholar] [CrossRef]
- Waldner, F.; Defourny, P. Where can pixel counting area estimates meet user-defined accuracy requirements? Int. J. Appl. Earth Obs. Geoinf. 2017, 60, 1–10. [Google Scholar] [CrossRef]
- Chiba, S.; Kawatsu, S.; Hayashida, M. Large-area Mapping of the Mass Mortality and Subsequent Regeneration of Abies mariesii Forests in the Zao Mountains in Northern Japan. J. Jpn. For. Soc. 2020, 102, 108–114. [Google Scholar] [CrossRef]
- Shakun, R.S.; Wulder, M.A.; Franklin, S.E. Sensitivity of the thematic mapper enhanced wetness difference index to detect mountain pine beetle red-attack damage. Remote Sens. Environ. 2003, 86, 433–443. [Google Scholar] [CrossRef]
- Wulder, M.A.; Dymond, C.C.; White, J.C.; Leckie, D.G.; Carroll, A.L. Surveying Mountain pine beetle damage of forests: A review of remote sensing opportunities. For. Ecol. Manag. 2006, 221, 27–41. [Google Scholar] [CrossRef]
- Raffa, K.F.; Berryman, A.A. The role of host plant resistance in the colonization behavior and ecology of bark beetles (Coleoptera: Scolytedae). Ecol. Monogr. 1983, 53, 27–49. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orthomosaic | Date | Red | Green | Blue |
|---|---|---|---|---|
| Site 1 | 1 March 2020 | 159.96 | 166.15 | 161.51 |
| Site 1 | 1 August 2020 | 159.52 | 165.43 | 130.20 |
| Site 1 | 6 September 2021 | 149.83 | 170.69 | 136.03 |
| Site 1 | 6 September 2021 | 150.68 | 171.55 | 136.89 |
| Site 1 | 16 September 2021 | 149.83 | 170.69 | 136.03 |
| Site 2 | 1 March 2020 | 175.00 | 178.83 | 169.47 |
| Site 2 | 1 August 2020 | 166.38 | 172.93 | 138.60 |
| Site 3 | 14 August 2020 | 78.56 | 92.55 | 72.44 |
| Site 3 | 17 November 2020 | 161.17 | 165.69 | 153.75 |
| Site 3 | 6 September 2021 | 160.02 | 169.02 | 140.95 |
| Site 3 | 5 October 2021 | 167.83 | 178.61 | 143.64 |
| Site 4 | 15 October 2020 | 192.67 | 193.64 | 168.54 |
| Site 4 | 26 October 2020 | 192.01 | 199.02 | 179.28 |
| Site 4 | 27 June 2020 | 136.82 | 135.18 | 97.92 |
| Site 4 | 27 June 2020 | 189.80 | 194.10 | 174.58 |
| Site 4 | 26 October 2020 | 178.26 | 176.08 | 126.58 |
| Site 4 | 5 August 2021 | 178.88 | 201.51 | 170.82 |
| Site 4 | 5 October 2021 | 207.46 | 211.07 | 192.16 |
| Site 5 | 18 August 2021 | 189.77 | 194.02 | 174.54 |
| 67 Trees | Cat 1 | Cat 2 | Cat 3 | Cat 4 | Cat 5 | Cat 6 |
|---|---|---|---|---|---|---|
| Sensitivity | 0.78 | 0.51 | 0.47 | 0.50 | 0.60 | 0.85 |
| Specificity | 0.95 | 0.91 | 0.88 | 0.91 | 0.92 | 0.99 |
| Precision | 0.79 | 0.53 | 0.36 | 0.56 | 0.55 | 0.94 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leidemer, T.; Gonroudobou, O.B.H.; Nguyen, H.T.; Ferracini, C.; Burkhard, B.; Diez, Y.; Lopez Caceres, M.L. Classifying the Degree of Bark Beetle-Induced Damage on Fir (Abies mariesii) Forests, from UAV-Acquired RGB Images. Computation 2022, 10, 63. https://doi.org/10.3390/computation10040063
Leidemer T, Gonroudobou OBH, Nguyen HT, Ferracini C, Burkhard B, Diez Y, Lopez Caceres ML. Classifying the Degree of Bark Beetle-Induced Damage on Fir (Abies mariesii) Forests, from UAV-Acquired RGB Images. Computation. 2022; 10(4):63. https://doi.org/10.3390/computation10040063
Chicago/Turabian StyleLeidemer, Tobias, Orou Berme Herve Gonroudobou, Ha Trang Nguyen, Chiara Ferracini, Benjamin Burkhard, Yago Diez, and Maximo Larry Lopez Caceres. 2022. "Classifying the Degree of Bark Beetle-Induced Damage on Fir (Abies mariesii) Forests, from UAV-Acquired RGB Images" Computation 10, no. 4: 63. https://doi.org/10.3390/computation10040063
APA StyleLeidemer, T., Gonroudobou, O. B. H., Nguyen, H. T., Ferracini, C., Burkhard, B., Diez, Y., & Lopez Caceres, M. L. (2022). Classifying the Degree of Bark Beetle-Induced Damage on Fir (Abies mariesii) Forests, from UAV-Acquired RGB Images. Computation, 10(4), 63. https://doi.org/10.3390/computation10040063