Enhancement of RWSN Lifetime via Firework Clustering Algorithm Validated by ANN


Abstract
:1. Introduction
2. Prior Knowledge
3. The Framework of the Present Study
3.1. Energy Consumption Model
- During the renewable energy process, the energy of each sensor node remains equal both at the beginning and at the end of the renewable cycle with the time of t.
- The battery of each sensor node is fully charged initially and has a capacity of Emax.
- To make a sensor node operational; the energy of the sensor node is never less than the Emin.
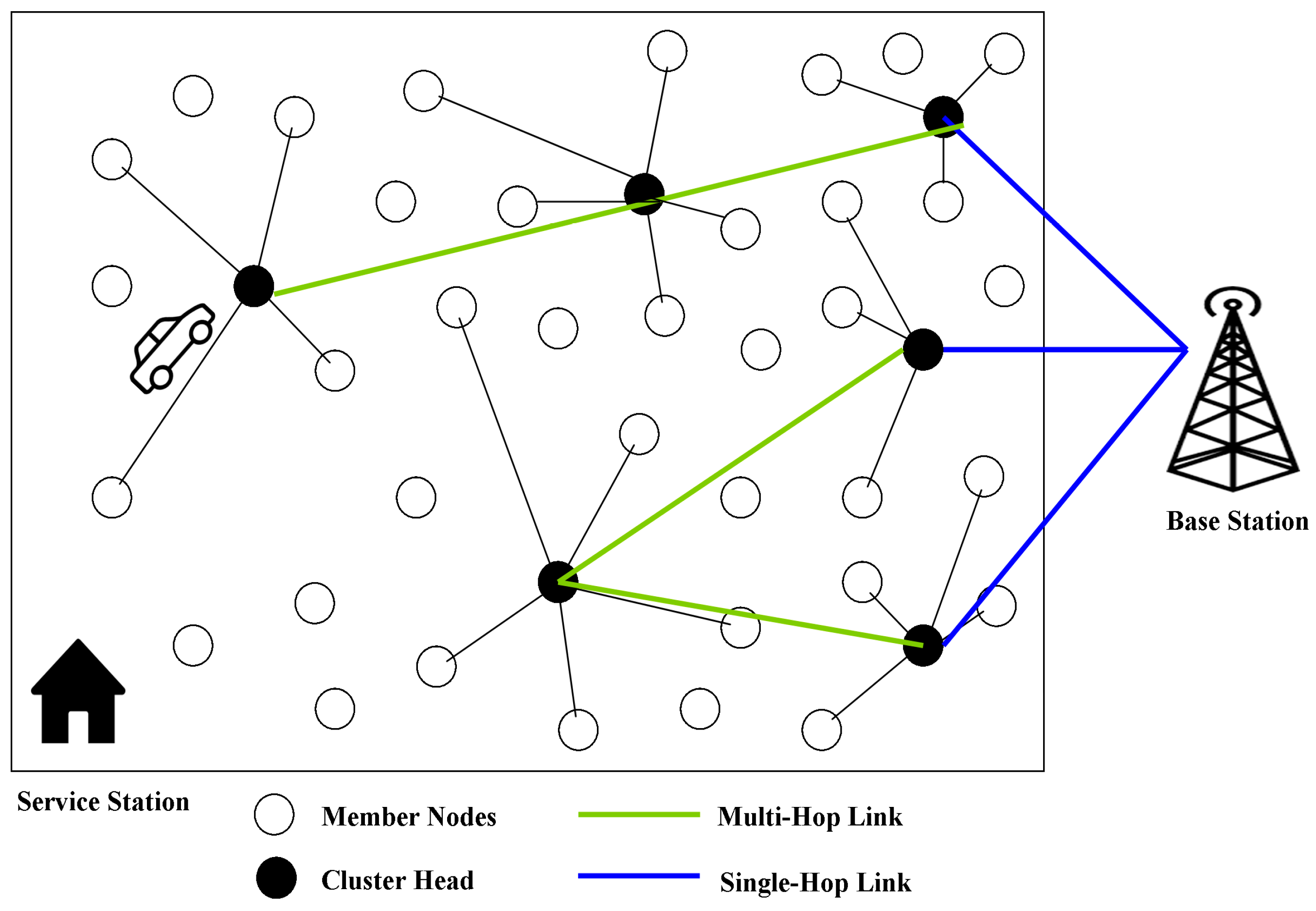
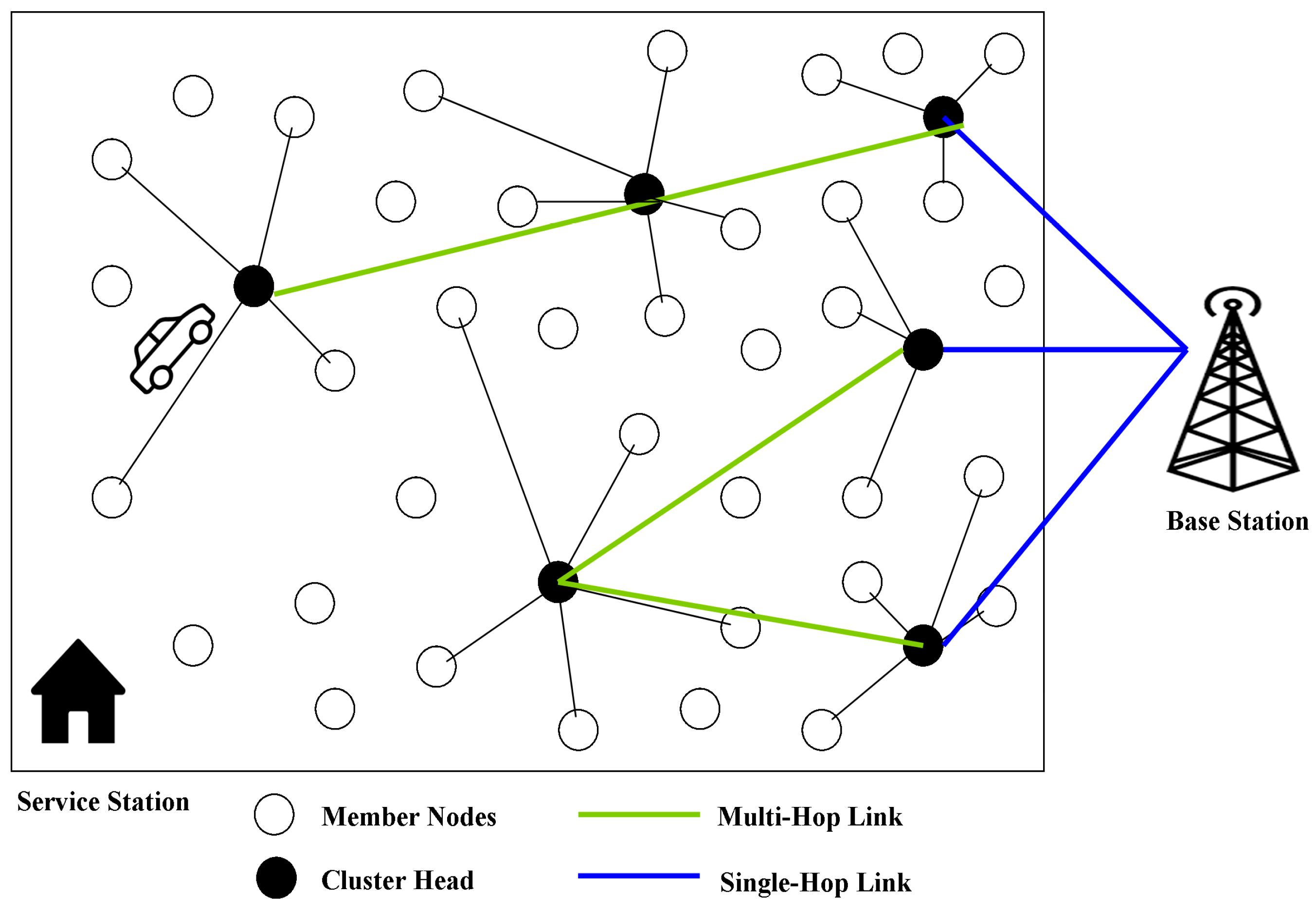
- The charging tour of the wireless charging device starts from the service station and reach sensor node i on the given path.
- During the time, the wireless charging device charges the battery of sensor node i wirelessly via wireless energy transfer (WET). Then, wireless charging device moves towards the next sensor node to charge it.
- After completion of the one energy cycle, the wireless charging device will return to the service station to recharge itself (e.g., recharging and replacing its battery). This period is called vacation time, denoted as . After servicing itself, the wireless charging device will start its next energy cycle. The represents the overall time spent during one energy cycle by the wireless charging device.
3.2. Proposed Method
3.3. Cluster Head (CH) Selection
- The center of gravity is determined according to the coordinates of each sensor node. The center of gravity (Xc, Yc) must be fulfilled, based on the least square and minimum distance of sensor node given in the region. The formula below can evaluate the concrete calculation method.(xi, yi) represent coordinates of each sensor node.
- Node’s coordinates can calculate the distance between the sensor node and center of gravity.
- The remaining average energy of all nodes evaluated in each cluster.
- If the remaining energy of a node is higher than the other nodes of the average leftover energy, the sensor node will be elected as the head. Otherwise, next node can be chosen.
- After completion of one energy cycle and wireless charging, vehicle visits all cluster heads (CH), a round of reception and data transmission is completed. T represents each series of data transmission cycles in the network. T can be evaluated by using the formula.where V represents the moving velocity of wireless charging vehicle.
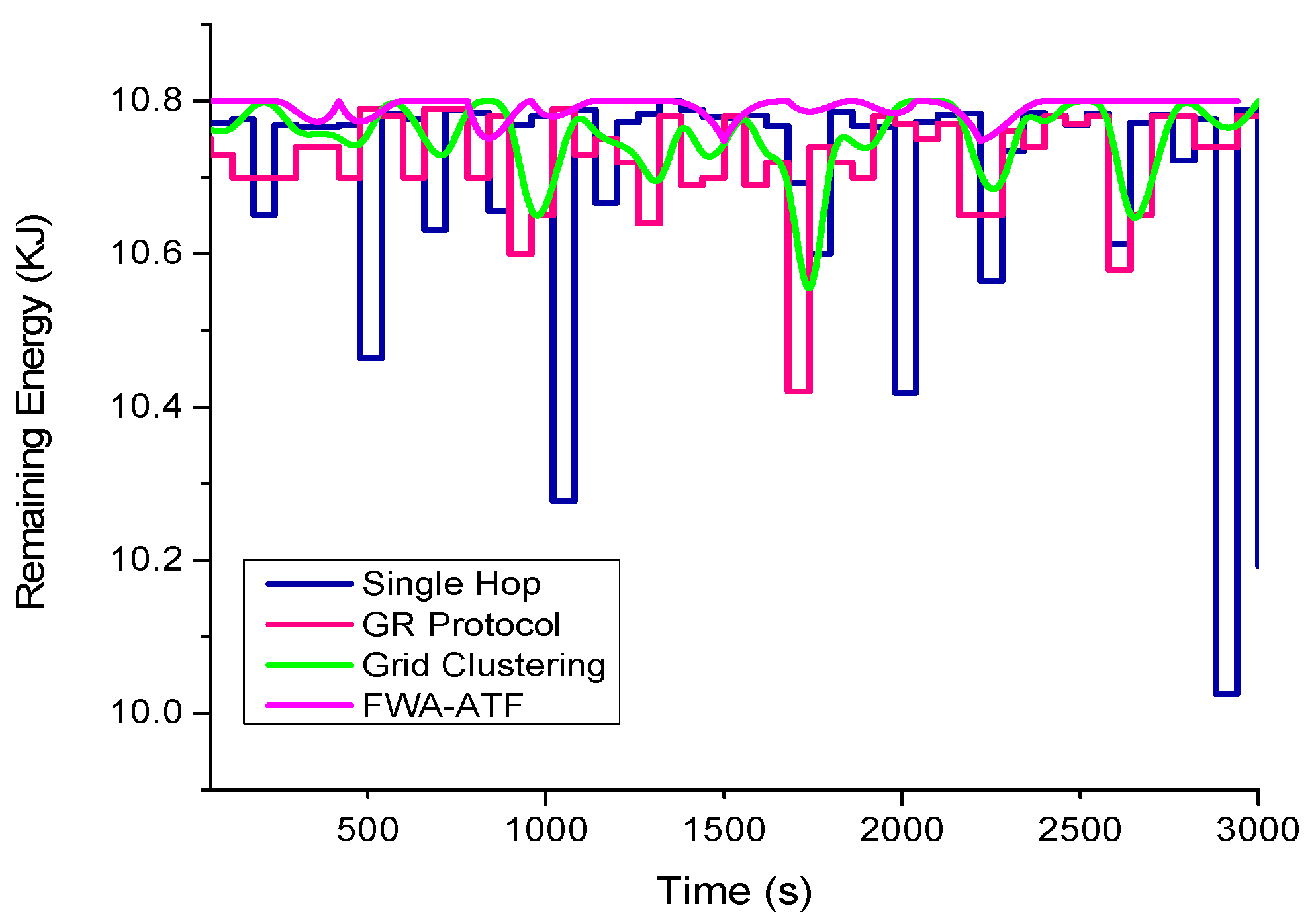
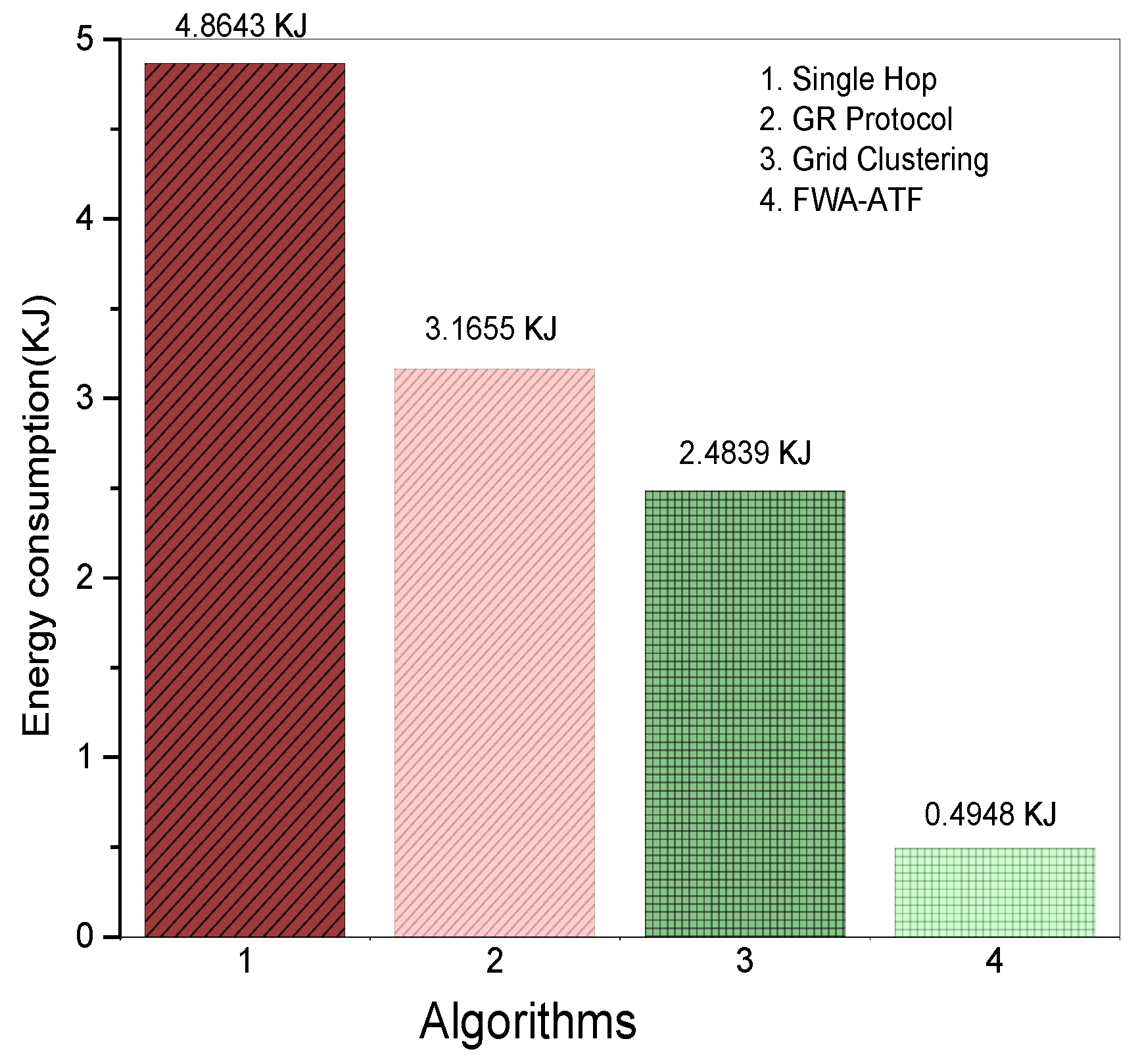
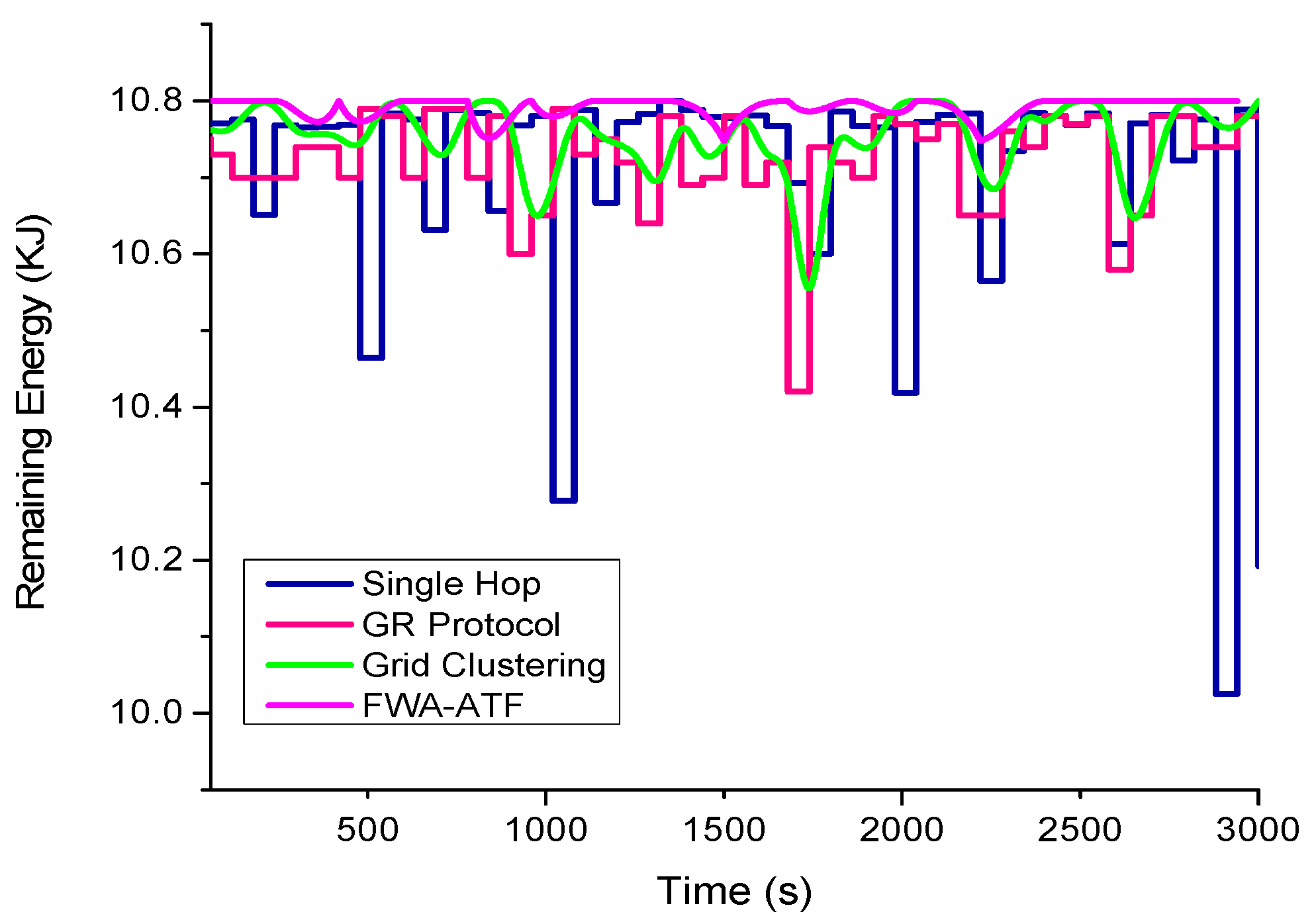
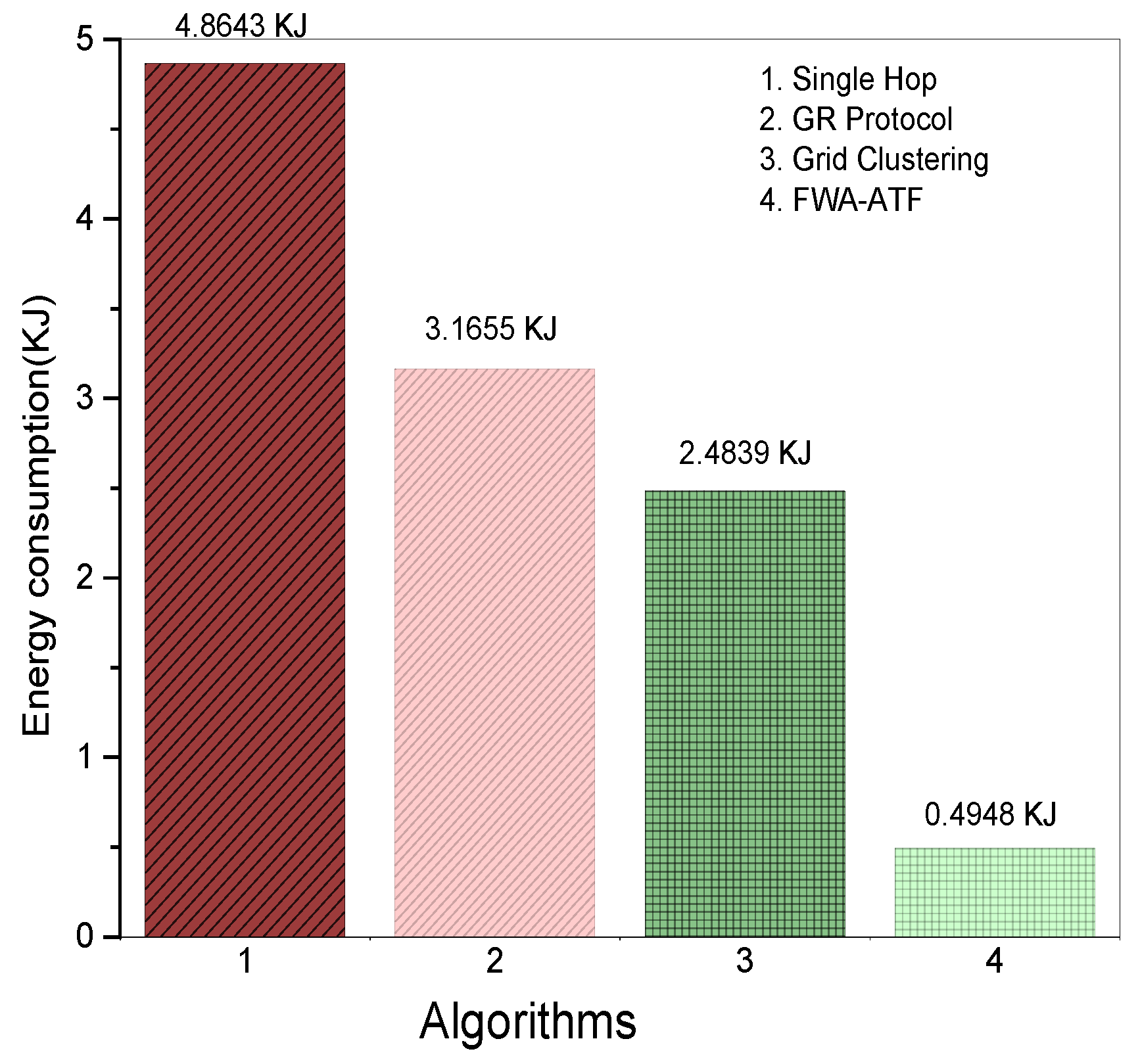
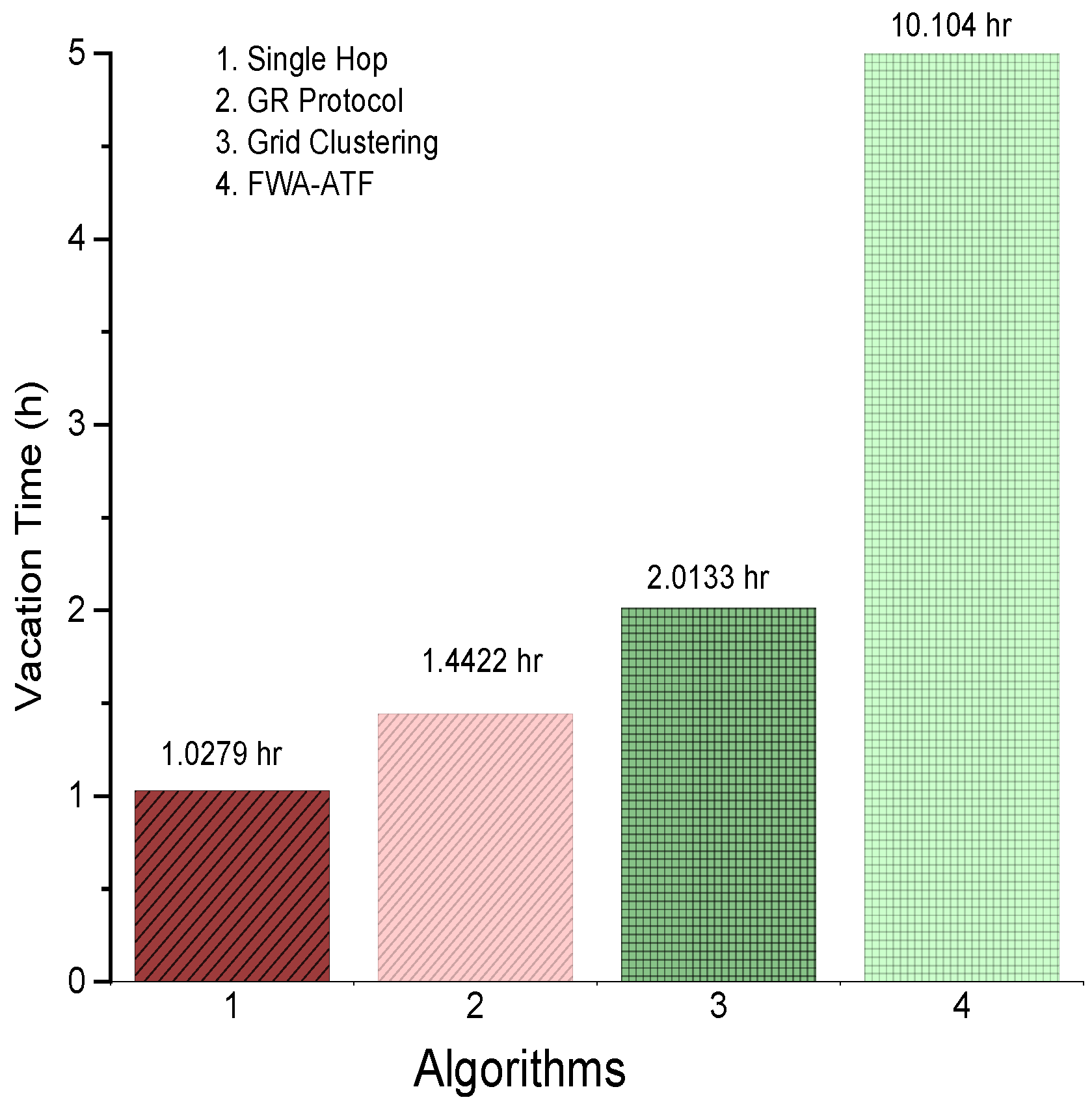
4. Simulation and Numerical Analysis
Numerical Analysis
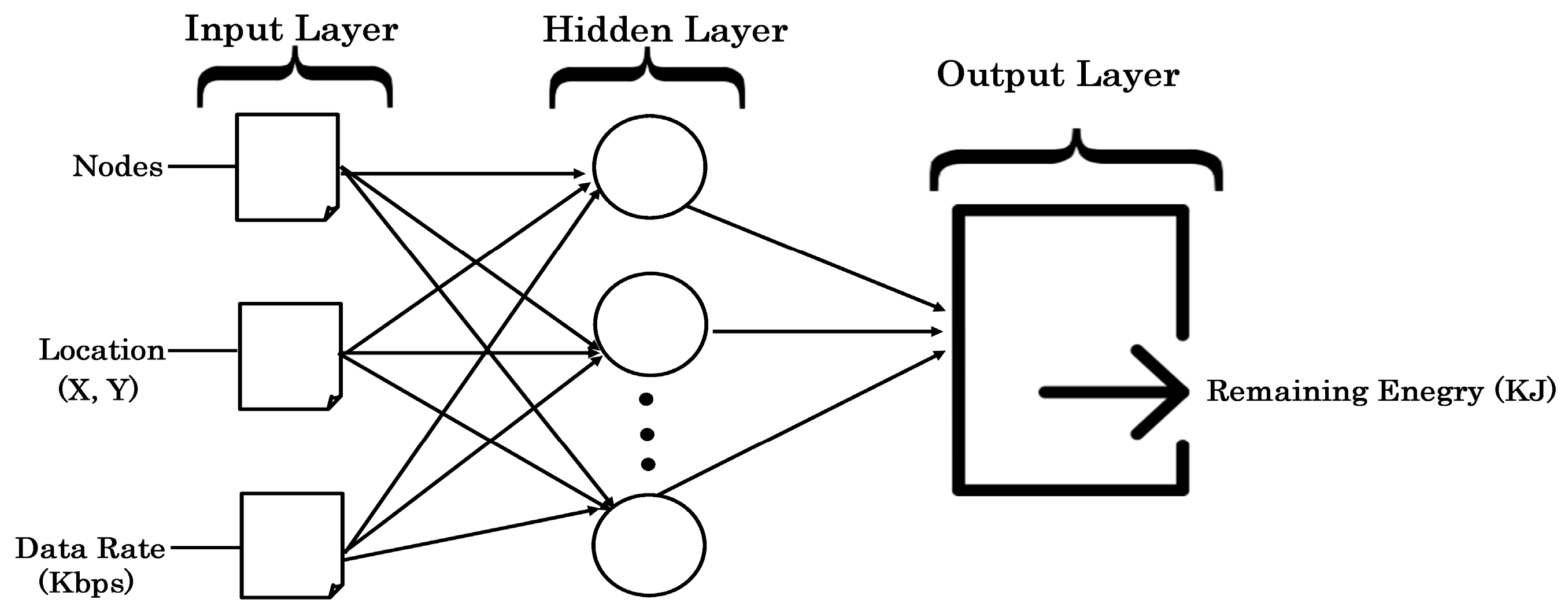
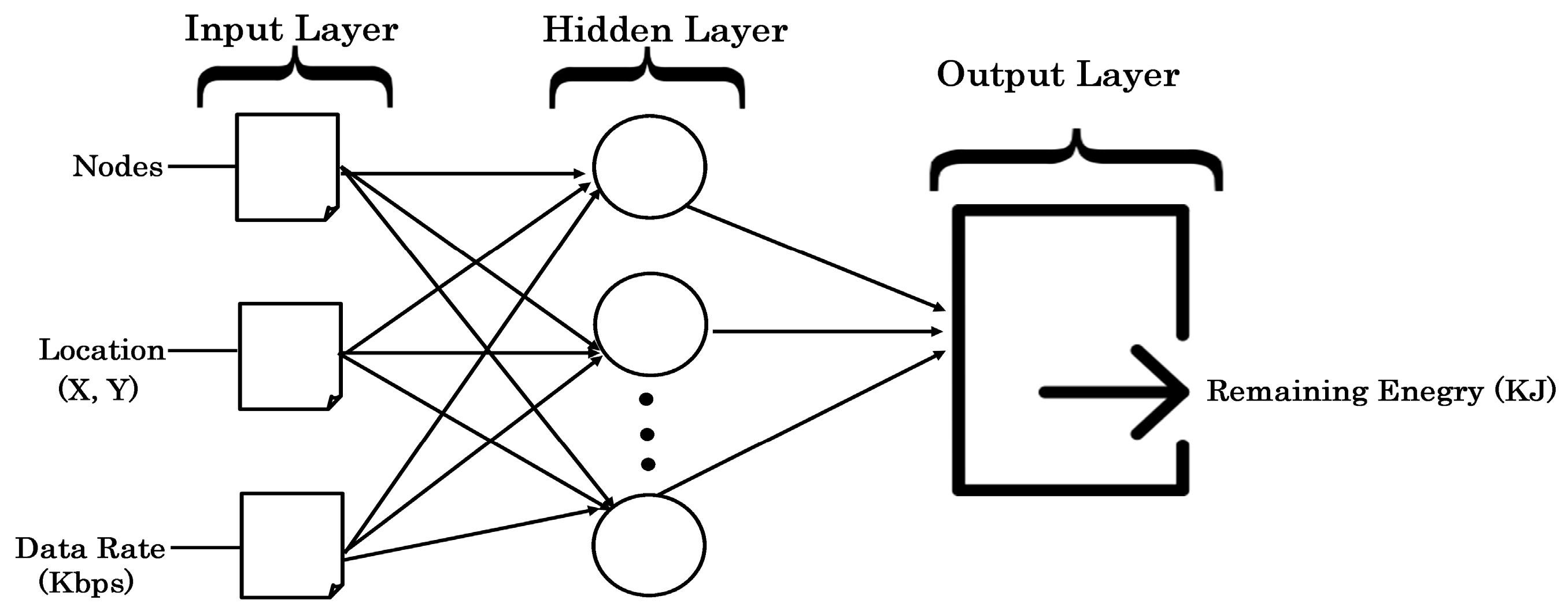
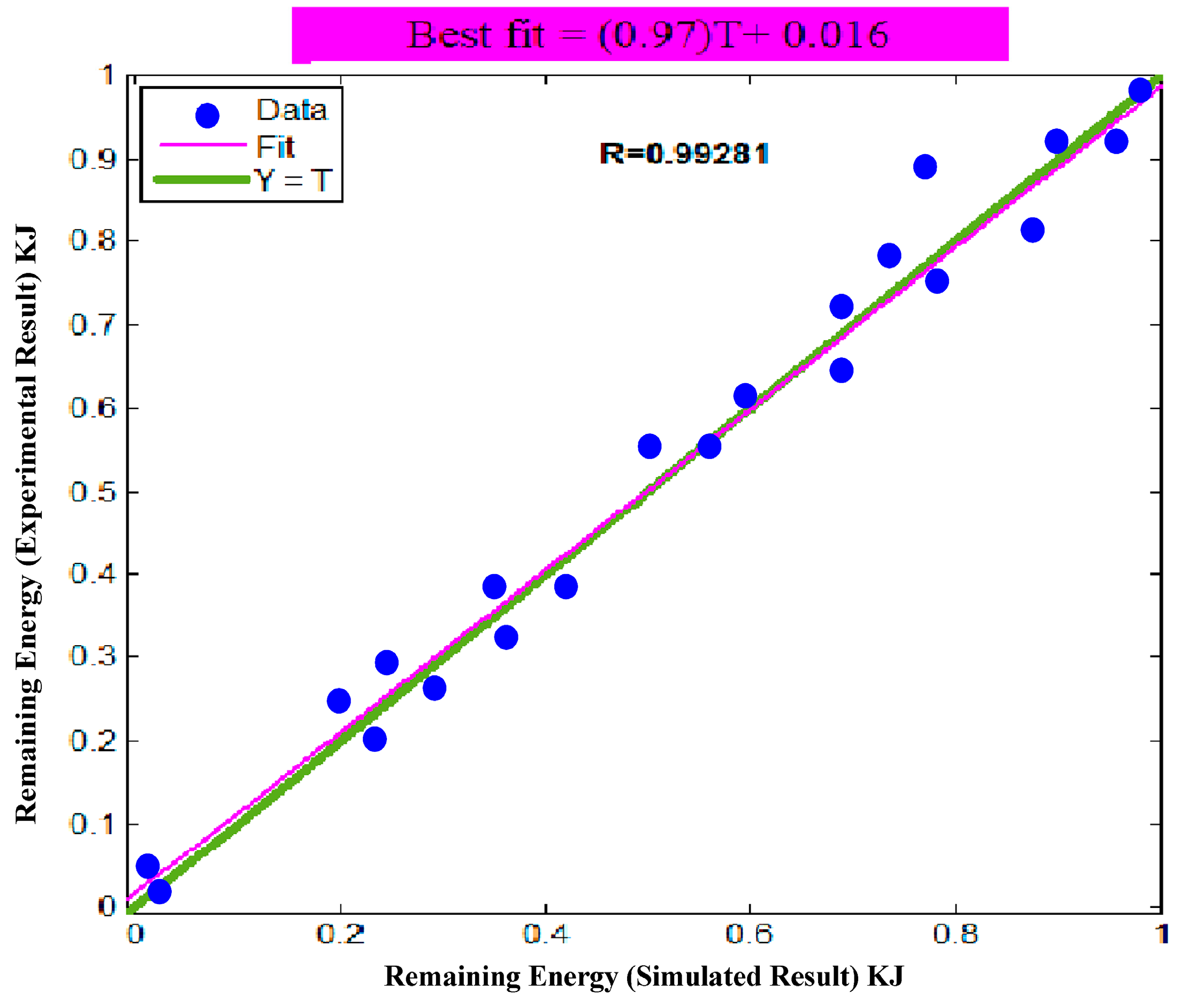
5. Validation of the Present Study
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- David, K.; Dixit, D.; Jefferies, N. 2020 Vision: The Wireless World Research Forum Looks to the Future. IEEE Veh. Technol. Mag. 2010, 5, 22–29. [Google Scholar] [CrossRef]
- Cisco Visual Networking Index. Global Mobile Data Traffic Forecast Update, 2016–2021 White Paper; Cisco: San Jose, CA, USA, 2017. [Google Scholar]
- Rose, K.; Eldridge, S.; Chapin, L. The Internet of Things (IoT): An Overview–Understanding the Issues and Challenges of a More Connected World; The Internet Society (ISOC): Reston, VI, USA, 2015. [Google Scholar]
- Ali, A.; Ming, Y.; Chakraborty, S.; Iram, S. A comprehensive survey on real-time applications of WSN. Future Internet 2017, 9, 77. [Google Scholar] [CrossRef]
- Tsiropoulou, E.E.; Paruchuri, S.T.; Baras, J.S. Interest, energy and physical-aware coalition formation and resource allocation in smart IoT applications. In Proceedings of the 2017 51st Annual Conference on Information Sciences and Systems (CISS), Baltimore, MD, USA, 22–24 March 2017; pp. 1–6. [Google Scholar]
- Elappila, M.; Chinara, S.; Parhi, D.R. Survivable path routing in WSN for IoT applications. Pervasive Mob. Comput. 2018, 43, 49–63. [Google Scholar] [CrossRef]
- Tefek, U.; Lim, T.J. Clustering and radio resource partitioning for machine-type communications in cellular networks. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference (WCNC), Doha, Qatar, 3–6 April 2016; pp. 1–6. [Google Scholar]
- Sherazi, H.H.R.; Grieco, L.A.; Boggia, G. A comprehensive review on energy harvesting MAC protocols in WSNs: Challenges and tradeoffs. Ad Hoc Netw. 2018, 71, 117–134. [Google Scholar] [CrossRef]
- Sudevalayam, S.; Kulkarni, P. Energy harvesting sensor nodes: Survey and implications. IEEE Commun. Surv. Tutor. 2011, 13, 443–461. [Google Scholar] [CrossRef]
- Liu, Q.; Golinński, M.; Pawełczak, P.; Warnier, M. Green wireless power transfer networks. IEEE J. Sel. Areas Commun. 2016, 34, 1740–1756. [Google Scholar] [CrossRef]
- Lu, X.; Wang, P.; Niyato, D.; Kim, D.I.; Han, Z. Wireless charging technologies: Fundamentals, standards, and network applications. IEEE Commun. Surv. Tutor. 2016, 18, 1413–1452. [Google Scholar] [CrossRef]
- Niyato, D.; Kim, D.I.; Maso, M.; Han, Z. Wireless powered communication networks: Research directions and technological approaches. IEEE Wirel. Commun. 2017, 24, 88–97. [Google Scholar] [CrossRef]
- Rault, T.; Bouabdallah, A.; Challal, Y. Multi-hop wireless charging optimization in low-power networks. In Proceedings of the 2013 IEEE Global Communications Conference (GLOBECOM), Atlanta, GA, USA, 9–13 December 2013; pp. 462–467. [Google Scholar]
- Chen, S.-H.; Cheng, Y.-C.; Lee, C.-H.; Wang, S.-P.; Chen, H.-Y.; Chen, T.-Y.; Wei, H.-W.; Shih, W.-K. Extending sensor network lifetime via wireless charging vehicle with an efficient routing protocol. In Proceedings of the 2016 SoutheastCon, Norfolk, VA, USA, 30 March–3 April 2016; pp. 1–2. [Google Scholar]
- Aslam, N.; Xia, K.; Haider, M.T.; Hadi, M.U. Energy-aware adaptive weighted grid clustering algorithm for renewable wireless sensor networks. Future Internet 2017, 9, 54. [Google Scholar] [CrossRef]
- Wang, Q.; Kong, F.; Wang, M.; Wang, H. Optimized charging scheduling with single mobile charger for wireless rechargeable sensor networks. Symmetry 2017, 9, 285. [Google Scholar] [CrossRef]
- Vamvakas, P.; Tsiropoulou, E.E.; Vomvas, M.; Papavassiliou, S. Adaptive power management in wireless powered communication networks: A user-centric approach. In Proceedings of the 2017 IEEE 38th Sarnoff Symposium, Newark, NJ, USA, 18–20 September 2017; pp. 1–6. [Google Scholar]
- Tsiropoulou, E.E.; Mitsis, G.; Papavassiliou, S. Interest-aware energy collection & resource management in machine to machine communications. Ad Hoc Netw. 2018, 68, 48–57. [Google Scholar]
- Xie, L.; Shi, Y.; Hou, Y.T.; Lou, W.; Sherali, H.D.; Midkiff, S.F. On renewable sensor networks with wireless energy transfer: The multi-node case. In Proceedings of the 2012 9th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Seoul, Korea, 18–21 June 2012; pp. 10–18. [Google Scholar]
- Si, T.; Ghosh, R. Explosion sparks generation using adaptive transfer function in firework algorithm. In Proceedings of the 2015 3rd International Conference on Signal Processing, Communication and Networking (ICSCN), Chennai, India, 26–28 March 2015; pp. 1–9. [Google Scholar]
- Misra, P.R.; Si, T. Image segmentation using clustering with fireworks algorithm. In Proceedings of the 2017 11th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 5–6 January 2017; pp. 97–102. [Google Scholar]
- Davies, D.L.; Bouldin, D.W. A cluster separation measure. IEEE Trans. Pattern Anal. Mach. Intell. 1979, 224–227. [Google Scholar] [CrossRef]
- Hou, Y.T.; Shi, Y.; Sherali, H.D. Applied Optimization Methods for Wireless Networks; Cambridge University Press: New York, NY, USA, 2014. [Google Scholar]
- Shi, L.; Han, J.; Han, D.; Ding, X.; Wei, Z. The dynamic routing algorithm for renewable wireless sensor networks with wireless power transfer. Comput. Netw. 2014, 74, 34–52. [Google Scholar] [CrossRef]
- Kurs, A.; Karalis, A.; Moffatt, R.; Joannopoulos, J.D.; Fisher, P.; Soljačić, M. Wireless power transfer via strongly coupled magnetic resonances. Science 2007, 317, 83–86. [Google Scholar] [CrossRef] [PubMed]
- Kumar, K.V.; Porkodi, K. Modelling the solid–liquid adsorption processes using artificial neural networks trained by pseudo second order kinetics. Chem. Eng. J. 2009, 148, 20–25. [Google Scholar] [CrossRef]
- Chakraborty, S.; Chowdhury, S.; Saha, P.D. Artificial neural network (ANN) modeling of dynamic adsorption of crystal violet from aqueous solution using citric-acid-modified rice (Oryza sativa) straw as adsorbent. Clean Technol. Environ. Policy 2013, 15, 255–264. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Definition |
|---|---|
| WCV | Wireless charging vehicle |
| BS | Base station |
| N | Sensor nodes deploy in WSN |
| Emax | Maximum battery capacity of nodes |
| Emin | Minimal battery level of a node to remain operational |
| V | Moving velocity of wireless charging vehicle |
| Ri | The rate of generating sensing data at sensor node i |
| Rc | Communication Radius of wireless charging vehicle |
| gij(t) or giB(t) | Data flow rate over a link from node i to node j and the BS |
| Energy consumption coefficient for retrieving the information | |
| Cij or CiB | Energy consumption per transmitting the data rate from node i to j and the BS |
| pi(t) | Energy consumption rate |
| Overall time consumed by the wireless charging vehicle in a charging cycle | |
| Time consumed by wireless charging vehicle to charge the battery of node i | |
| Vacation time of wireless charging vehicle to recharge itself | |
| Xc, Yc | Center of gravity |
| xi, yi | Coordinates of sensor |
| CH | Cluster head |
| D | Distance between the sensor node and center of gravity |
| T | Each round of data transmission cycle in the network |
| Parameters | Values |
|---|---|
| Number of sensor nodes, N | 50 |
| Length | 1000 m |
| Breadth | 1000 m |
| Emax—Maximum energy of a node | 10800 J |
| Emin—Minimum energy of a node | 540 J |
| Base station location | [500, 500] m |
| WCV location | [0, 0] |
| Speed of WCV | 5 m/s |
| U | 5 W |
| Path loss | Log-Normal Shadowing |
| Antenna | Omni Directional |
| Algorithm | FWA-ATF |
| Simulation time | 1 h |
| Data communication radius | 100 m |
| Hidden Layer Algorithm | Output Layer Function | Transfer Function | Transfer Function | Correlation Coefficient (R) |
|---|---|---|---|---|
| Resilient backpropagation | Trainrp | Poslin | Tansig | 0.992 |
| Conjugate gradient backpropagation with Polak–Ribiere updates | Traincgp | Poslin | Tansig | 0.756 |
| Gradient descent with momentum and adaptive learning rate backpropagation | Traingdx | Poslin | Tansig | 0.731 |
| Levenberg–Marquardt backpropagation | Trainlm | Poslin | Tansig | 0.674 |
| Scaled conjugate gradient backpropagation | Trainscg | Poslin | Tansig | 0.668 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, A.; Ming, Y.; Si, T.; Iram, S.; Chakraborty, S. Enhancement of RWSN Lifetime via Firework Clustering Algorithm Validated by ANN. Information 2018, 9, 60. https://doi.org/10.3390/info9030060
Ali A, Ming Y, Si T, Iram S, Chakraborty S. Enhancement of RWSN Lifetime via Firework Clustering Algorithm Validated by ANN. Information. 2018; 9(3):60. https://doi.org/10.3390/info9030060
Chicago/Turabian StyleAli, Ahmad, Yu Ming, Tapas Si, Saima Iram, and Sagnik Chakraborty. 2018. "Enhancement of RWSN Lifetime via Firework Clustering Algorithm Validated by ANN" Information 9, no. 3: 60. https://doi.org/10.3390/info9030060
APA StyleAli, A., Ming, Y., Si, T., Iram, S., & Chakraborty, S. (2018). Enhancement of RWSN Lifetime via Firework Clustering Algorithm Validated by ANN. Information, 9(3), 60. https://doi.org/10.3390/info9030060