In this sense, the configuration and simulation of the antenna is presented as well as the conclusions regarding the comparison of the results obtained through the CST Microwave Studio simulator.
3.2. Equivalent Circuit
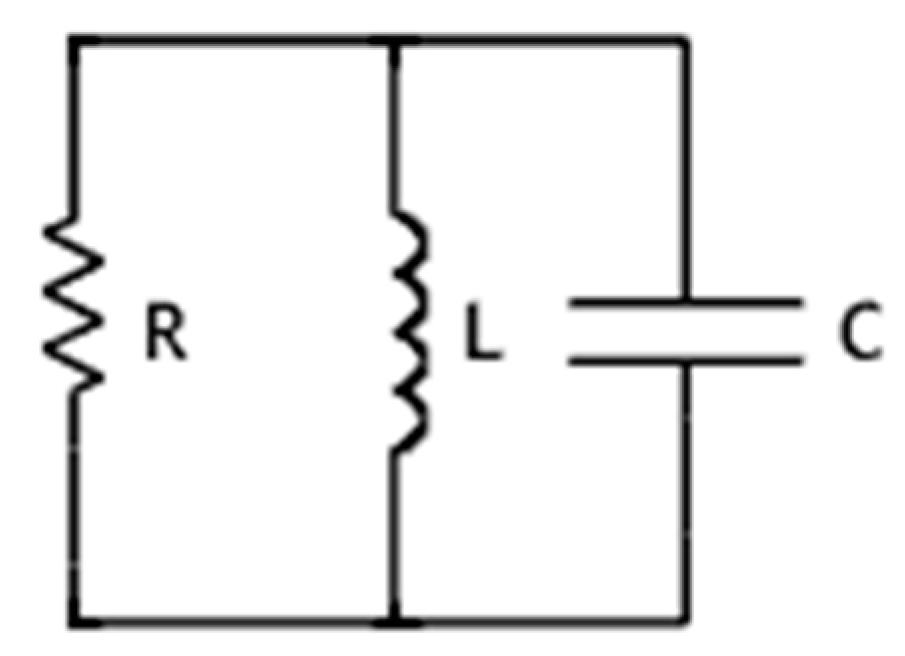
The planar antenna, from the point of view of the excitation signal source, can be described by an equivalent circuit, for example, a parallel resistor, inductor and capacitor (RLC) circuit, as shown in
Figure 6.
To determine the value of
R,
Lc e
C is necessary to carry out the study of the equivalent circuit, i.e., it is necessary to study the value of the current (
), represented through:
To maximize the antenna current module, it is necessary for the imaginary component of the previous equation to be equal to zero:
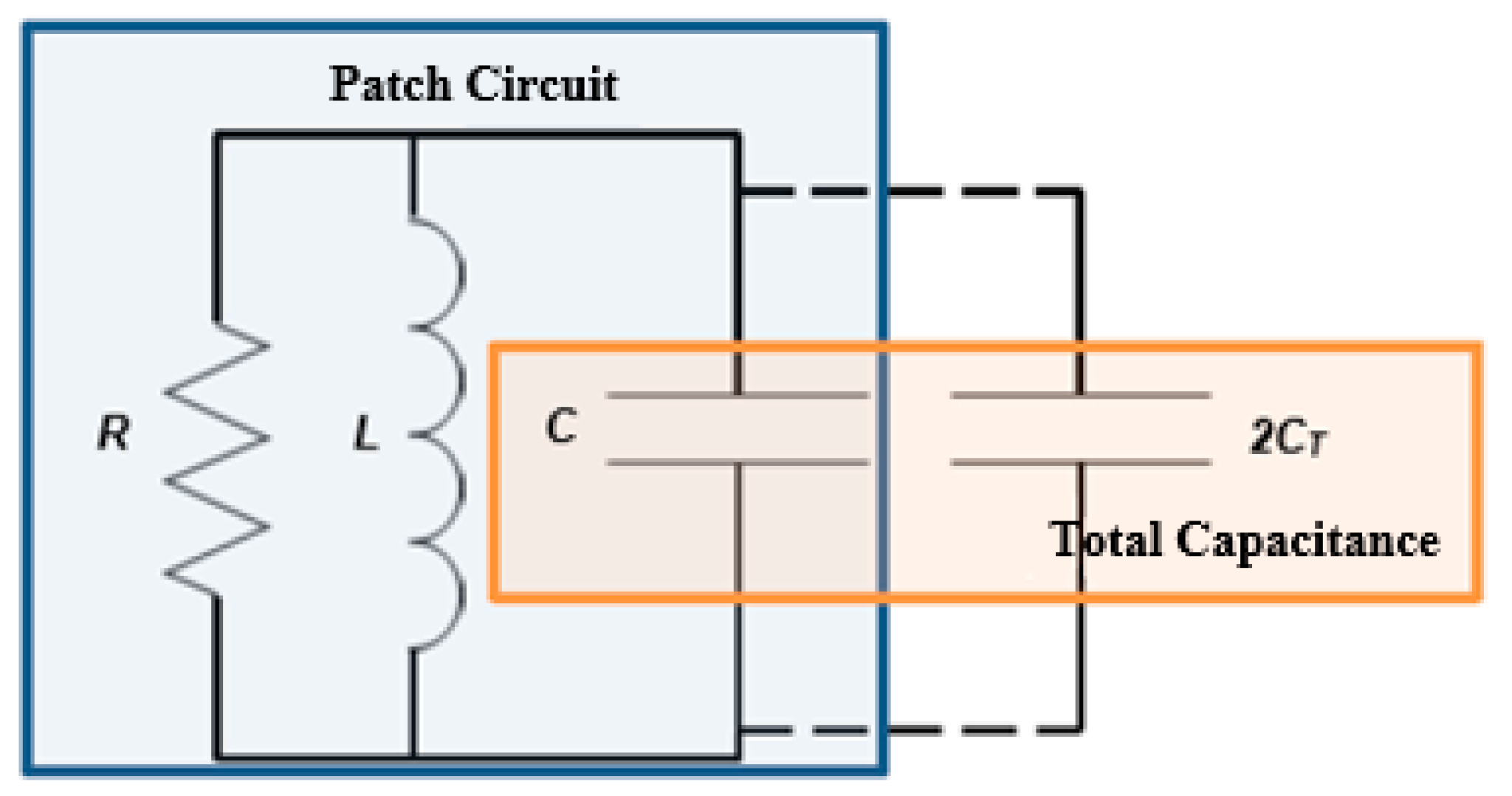
After analysis of the previous equation, it was noticed that the
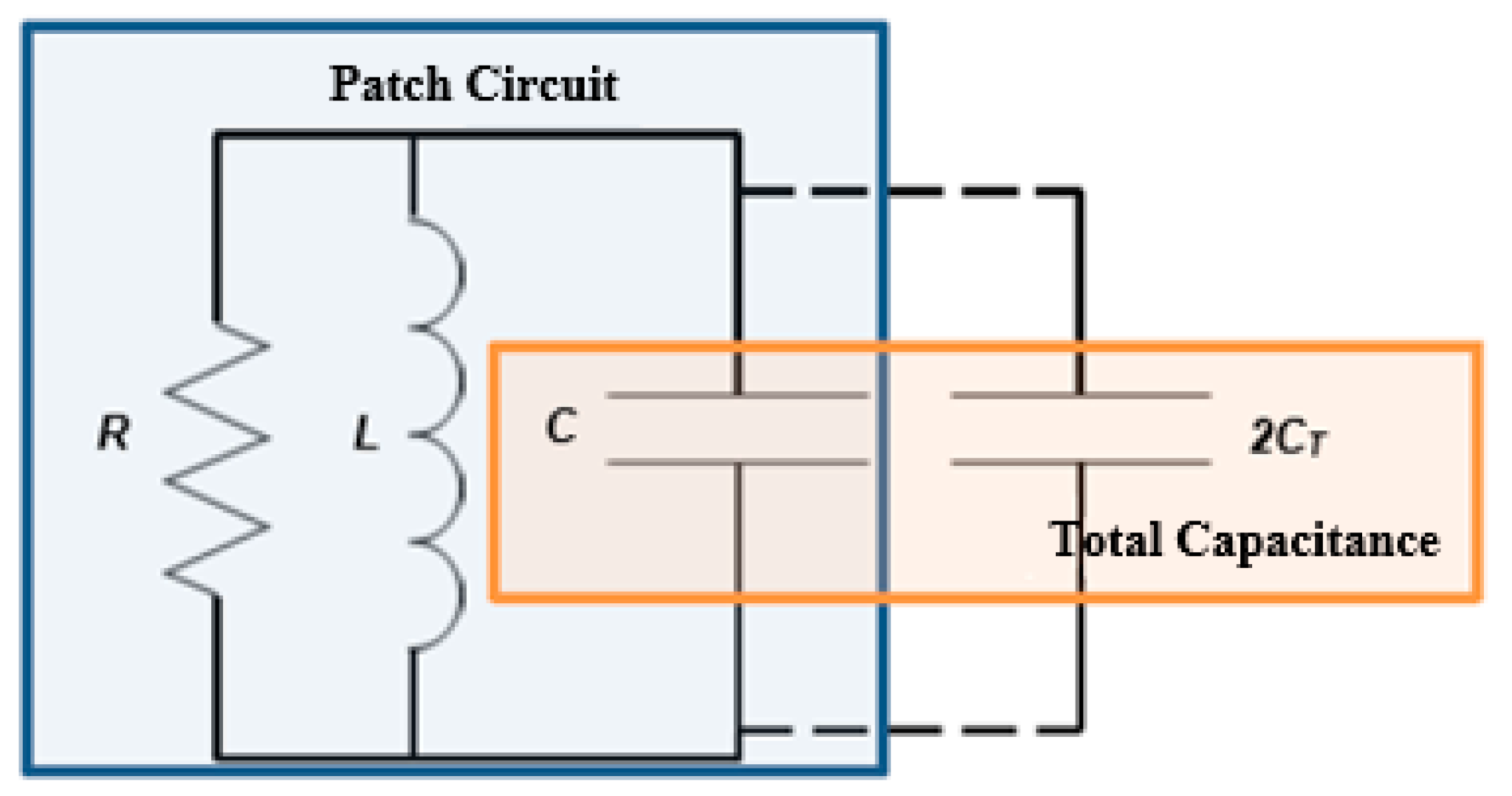
Lc and C were dependent on the resonant frequency of the antenna. In the case of this antenna, the variation of the radiation lobe is dependent on the capacitances of the varicap diodes. These diodes add a capacity to the 2
CT, as shown in
Figure 7 [
16].
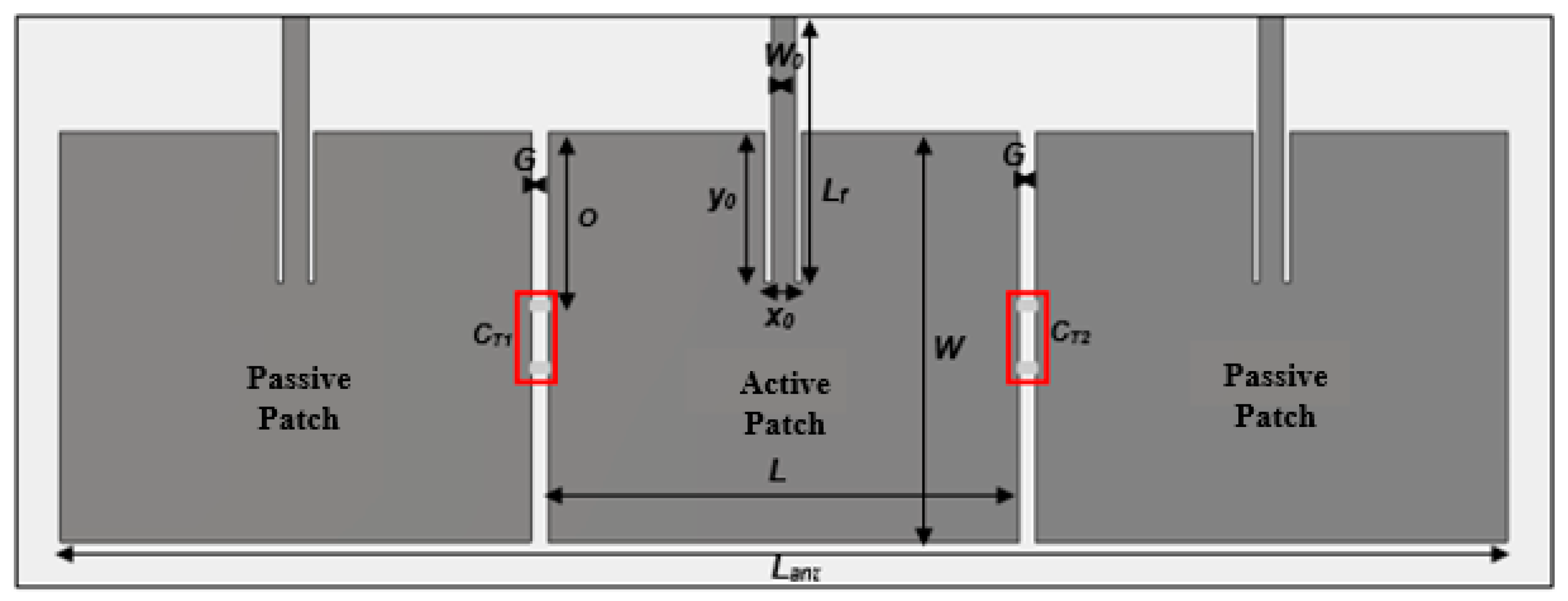
Before analysis to the system of equations, it is necessary to realize that
, that is,
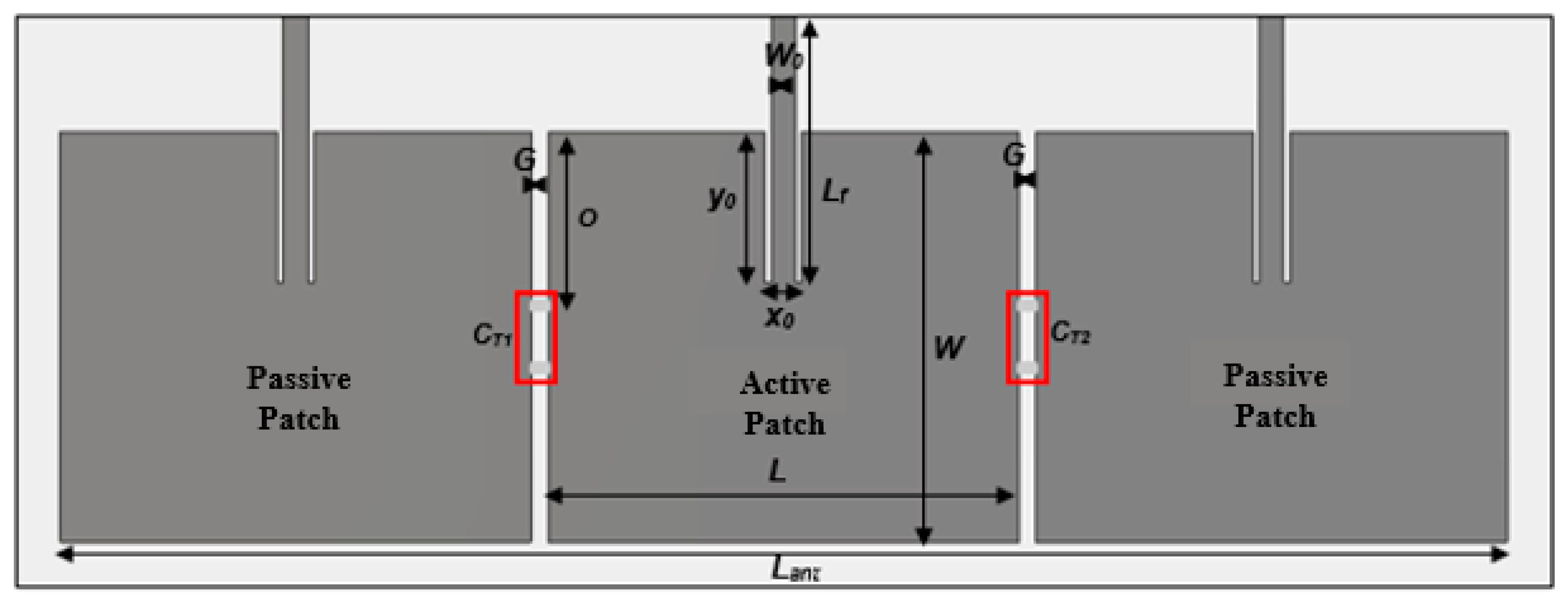
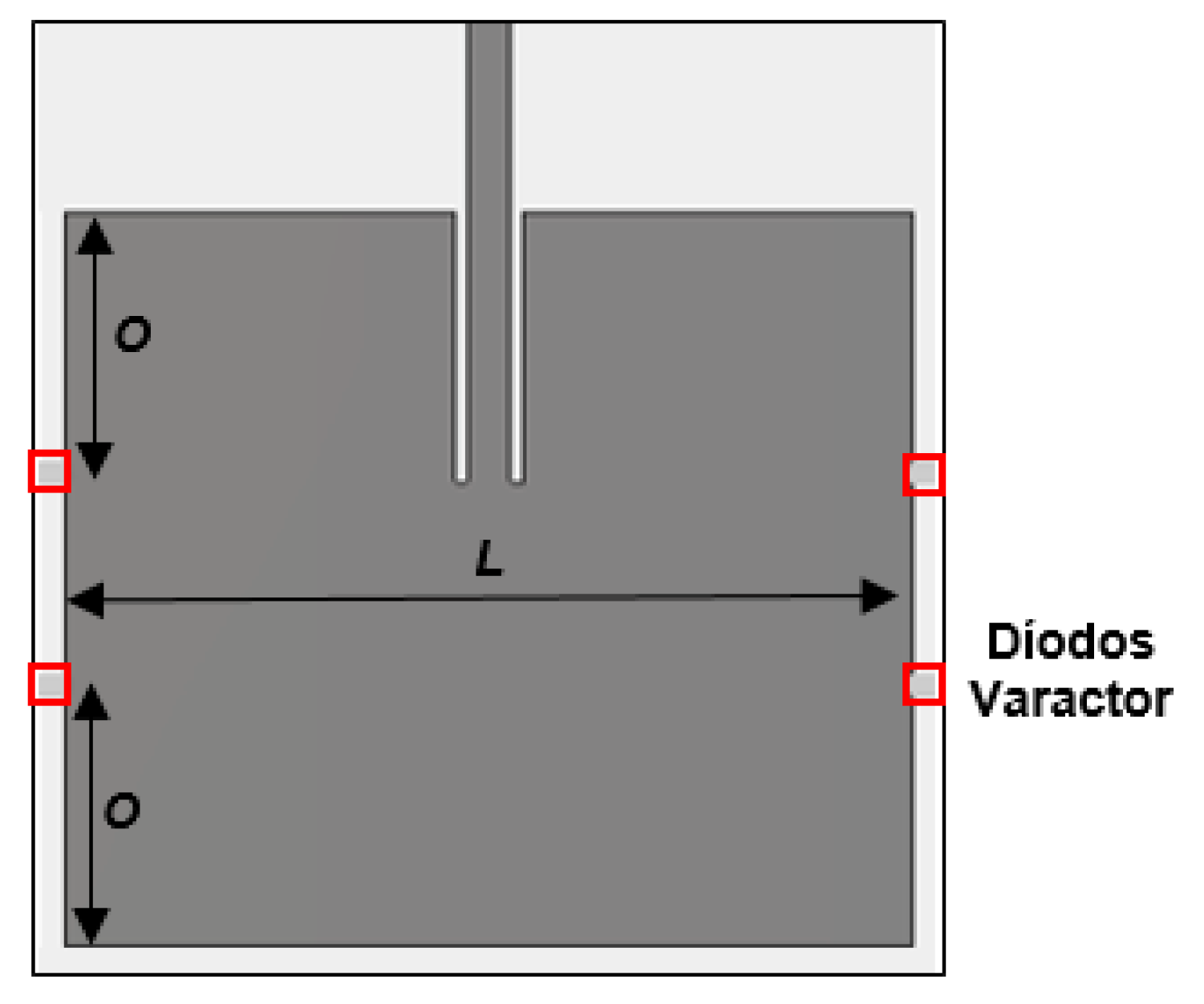
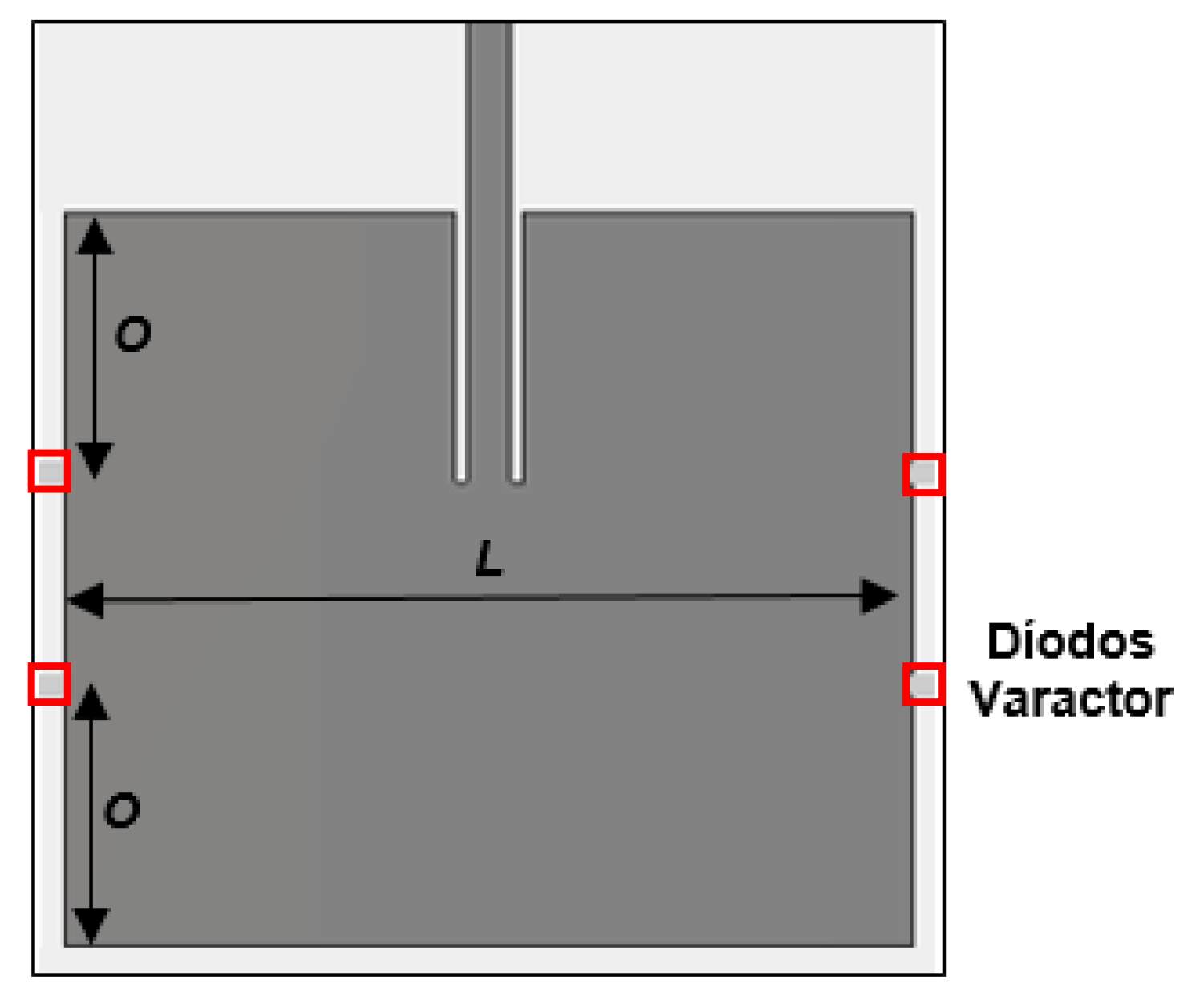
corresponds to the value of the effective capacity of the diodes in the circuit. This value is directly dependent on the positioning of the diodes in the patch, as represented in the following equation and
Figure 8, where variables
O and
L are represented [
16]:
In case of the equivalent circuit of the antenna, with the integration of the diodes, it is necessary to change the equivalent capacity, since capacity
C is added to the capacity of the diodes. The following equation represents this change:
To determine
L and
C, the CST Microwave studio simulator was used to obtain the resonance-frequency values of the antenna without and with diodes,
f0 and
fc, respectively (
Table 5). The capacity of the diodes considered for simulation purposes was
CT = 1 pF. The following system of equations allows
Lc and
C [
16]:
After obtaining the results of Lc and C of the RLC circuit, it was necessary to calculate the value of resistor R. Thus, analysis was made to the circuit, considering that the relation between the complex amplitude of the current in the resistor () and the complex amplitude of the total excitation current (), where ().
Initially, it was established that reflection coefficient |S11| cannot exceed −10 dB. For this reason, the ratio in dB between the complex amplitude of the current in the resistance and the complex amplitude of the total current cannot be greater than −10 dB, as represented in the following equation. This equation is solved to obtain resistance value (
Table 6):
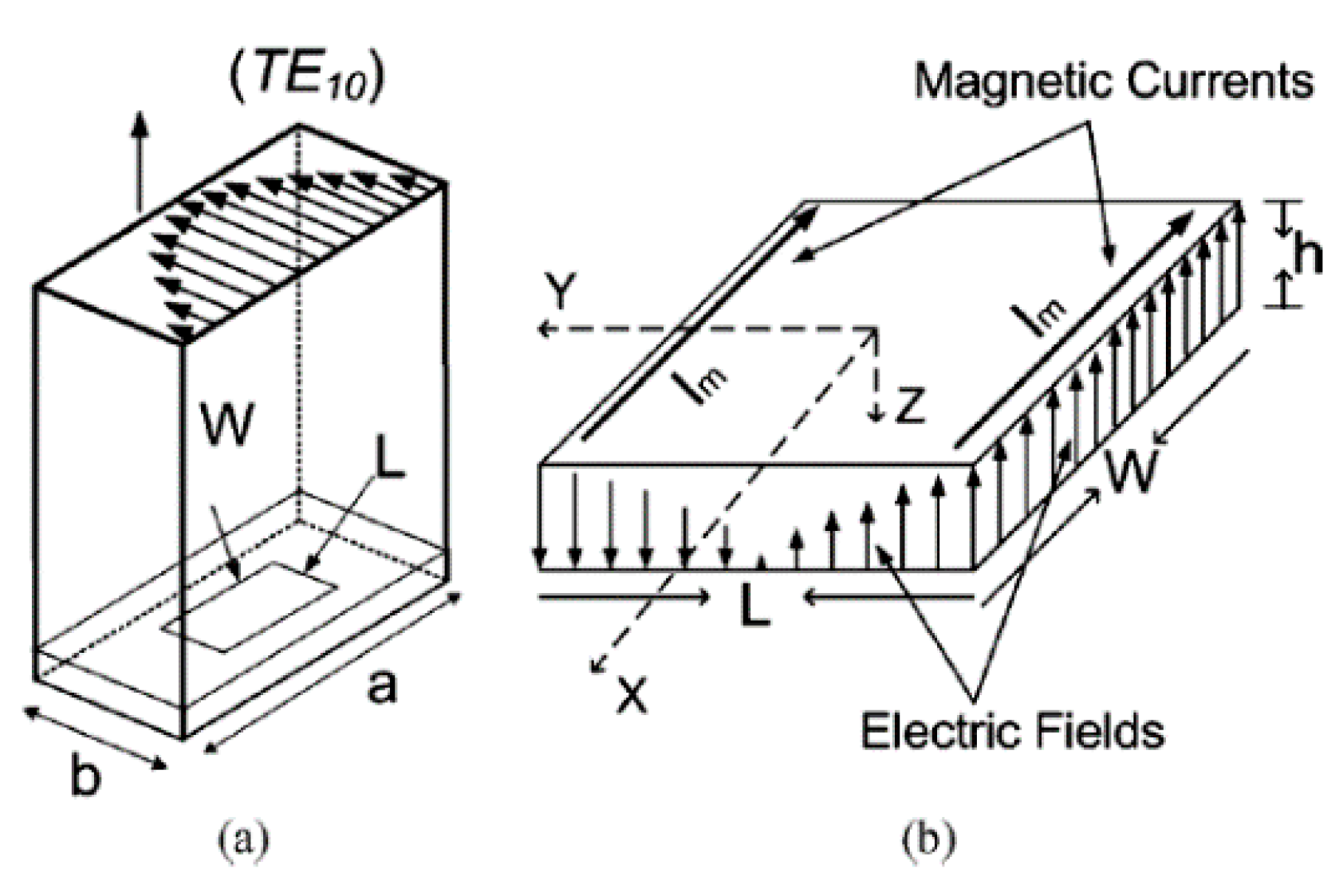
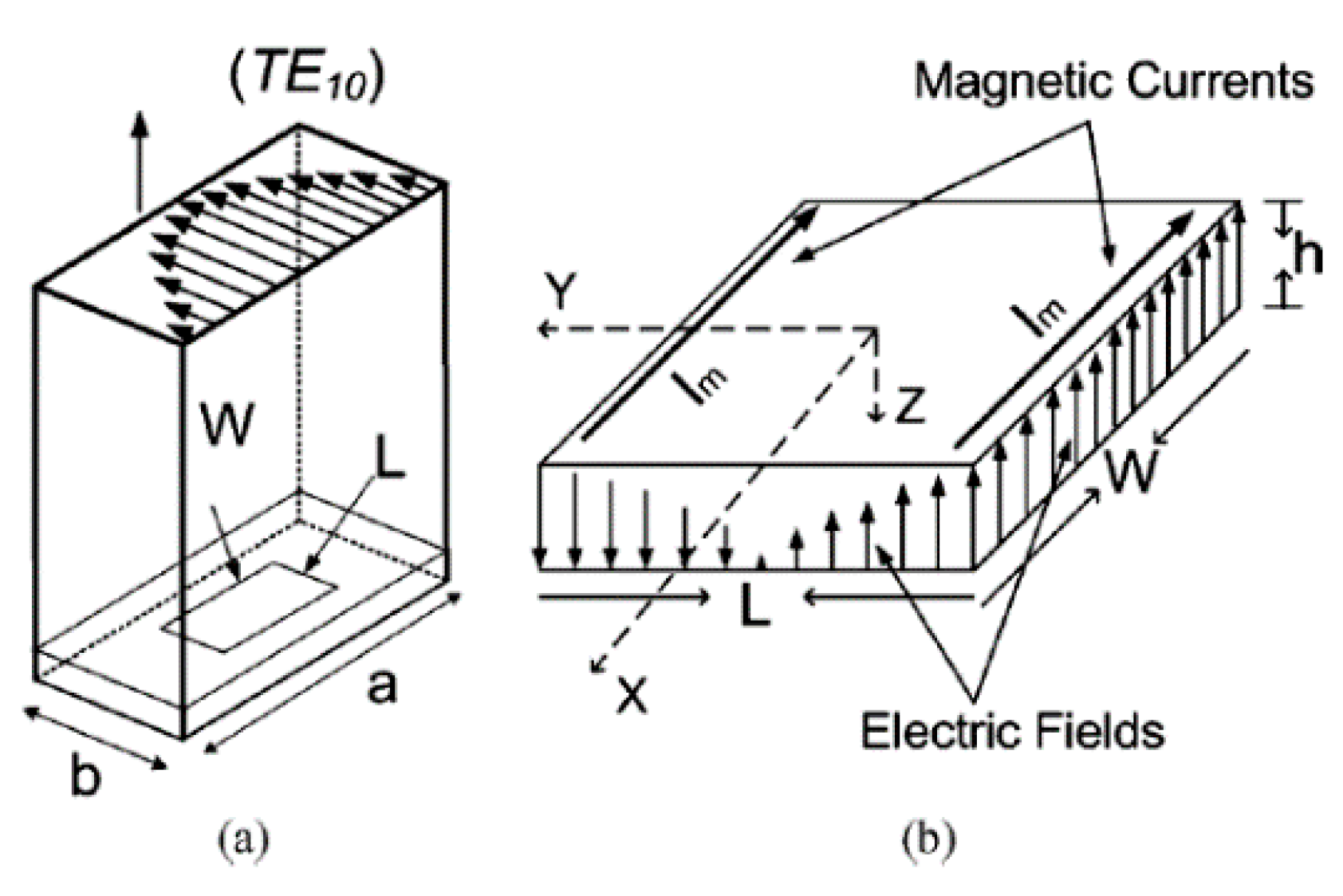
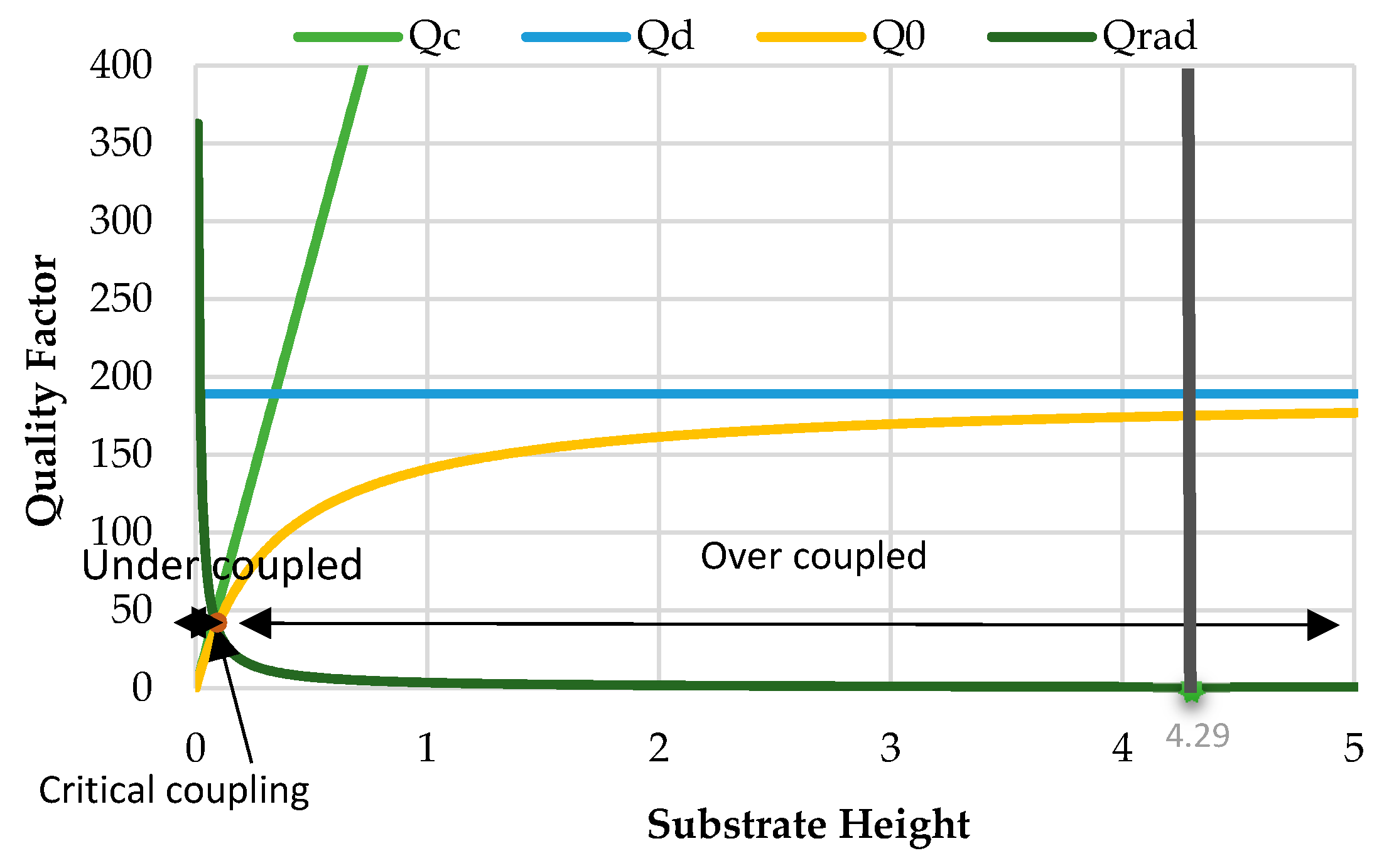
To study the coupling, it is necessary to consider the dielectric loss quality factor (
Qc), antenna patch quality factor (
Qd), metal loss quality factor (
Qo), and the quality factor of antenna radiation (
Qrad), represented by the following equations. Variables a, b,
W, and
L are represented in
Figure 9 [
17,
18].
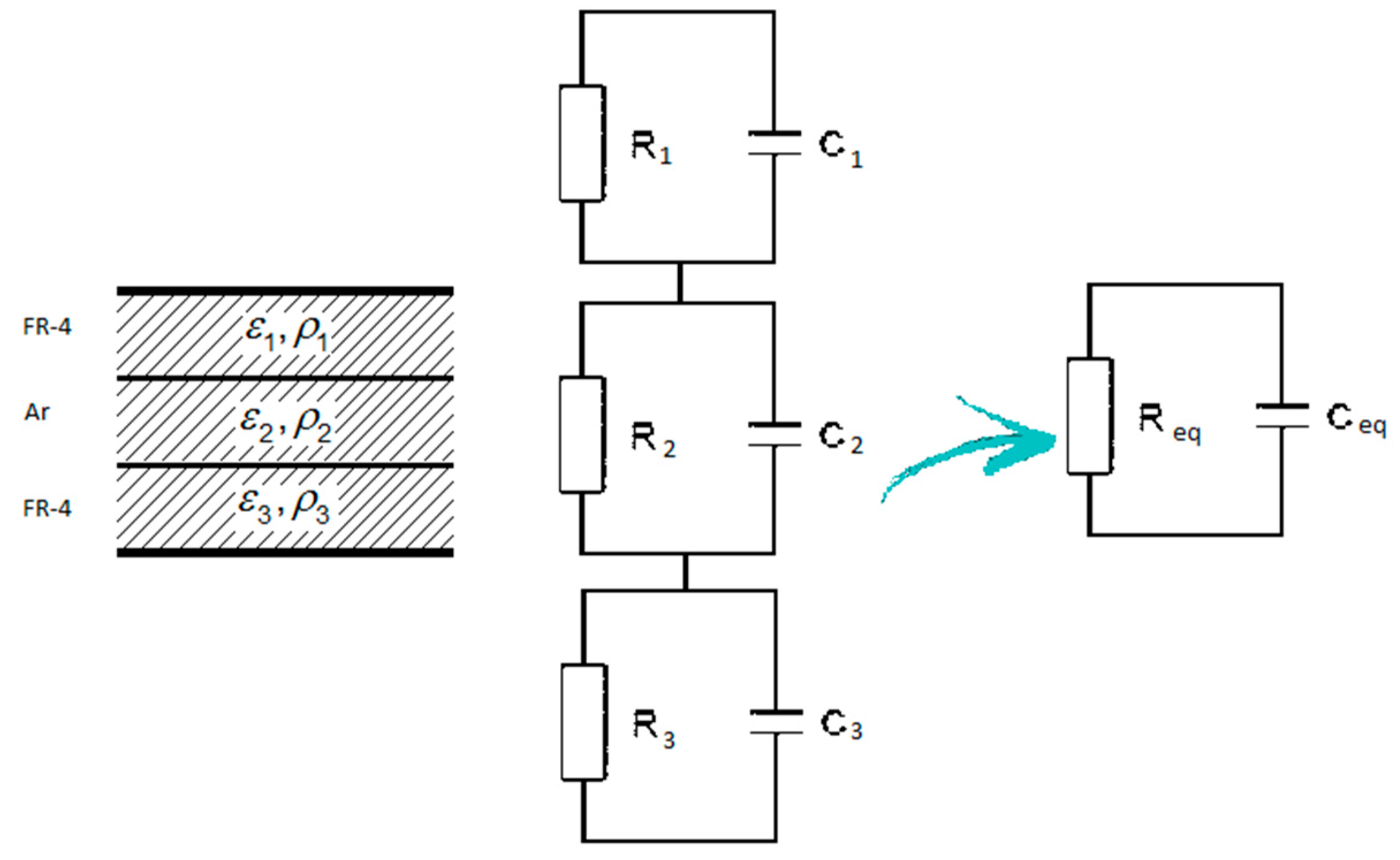
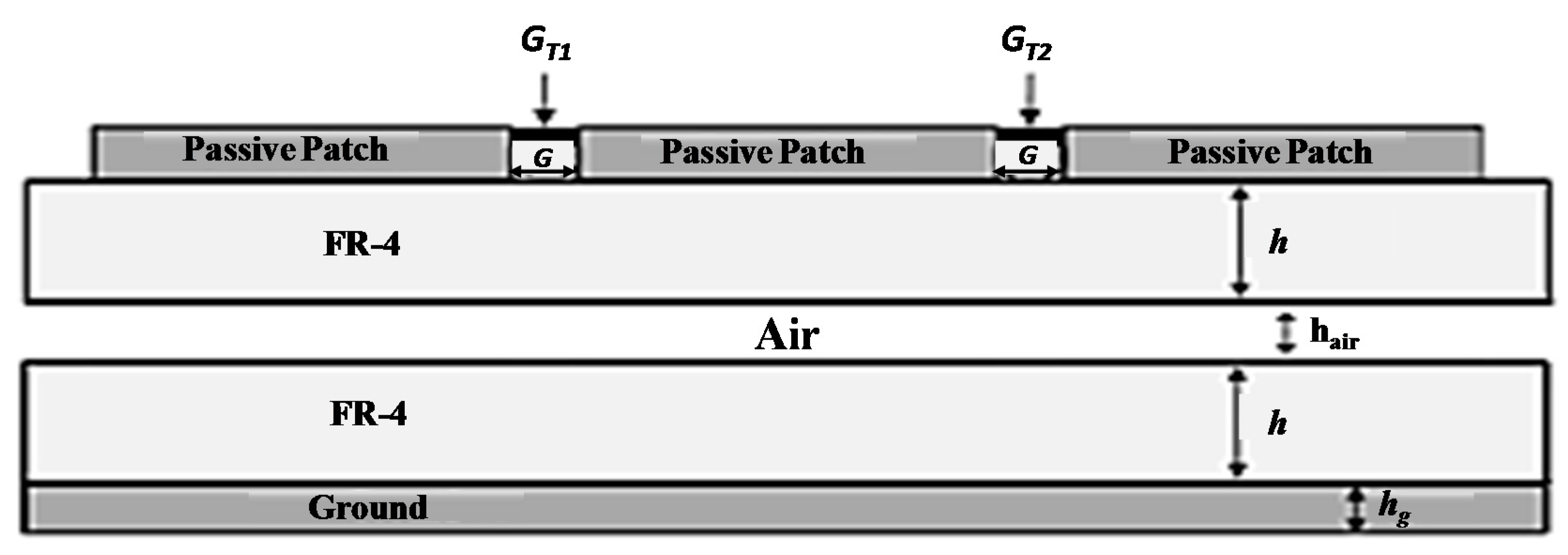
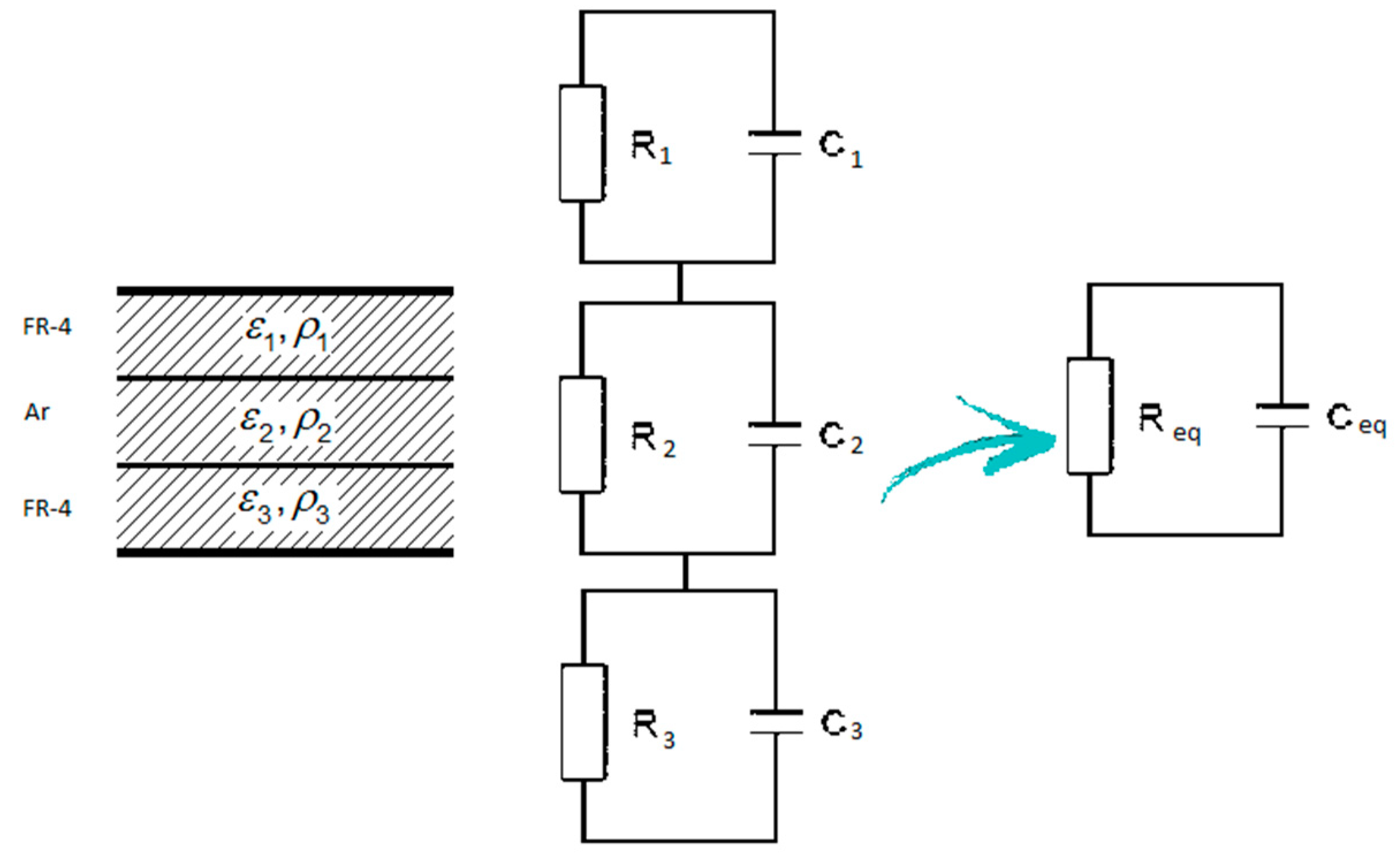
Analyzing the quality factor of the dielectric, it is perceptible that it depends on the loss tangent () of the same. In the case of the antenna with the FR-4 substrate, the medium was not homogeneous, that is, there were three media with different values of . As such, it was necessary to calculate the value of the equivalent loss tangent ().
To perform the study of the tangent of losses, it was necessary to establish the equivalent circuit for the substrate, as shown in
Figure 10. Each substrate corresponded to a parallel RC circuit, whereby the three underlying substrates corresponded to the series of these circuits as represented.
For calculating , it is necessary to consider the W, L, h, and a of each substrate.
The antenna resembles a three-component system, whereby the
for these circuits is given by the following equation [
19,
20]:
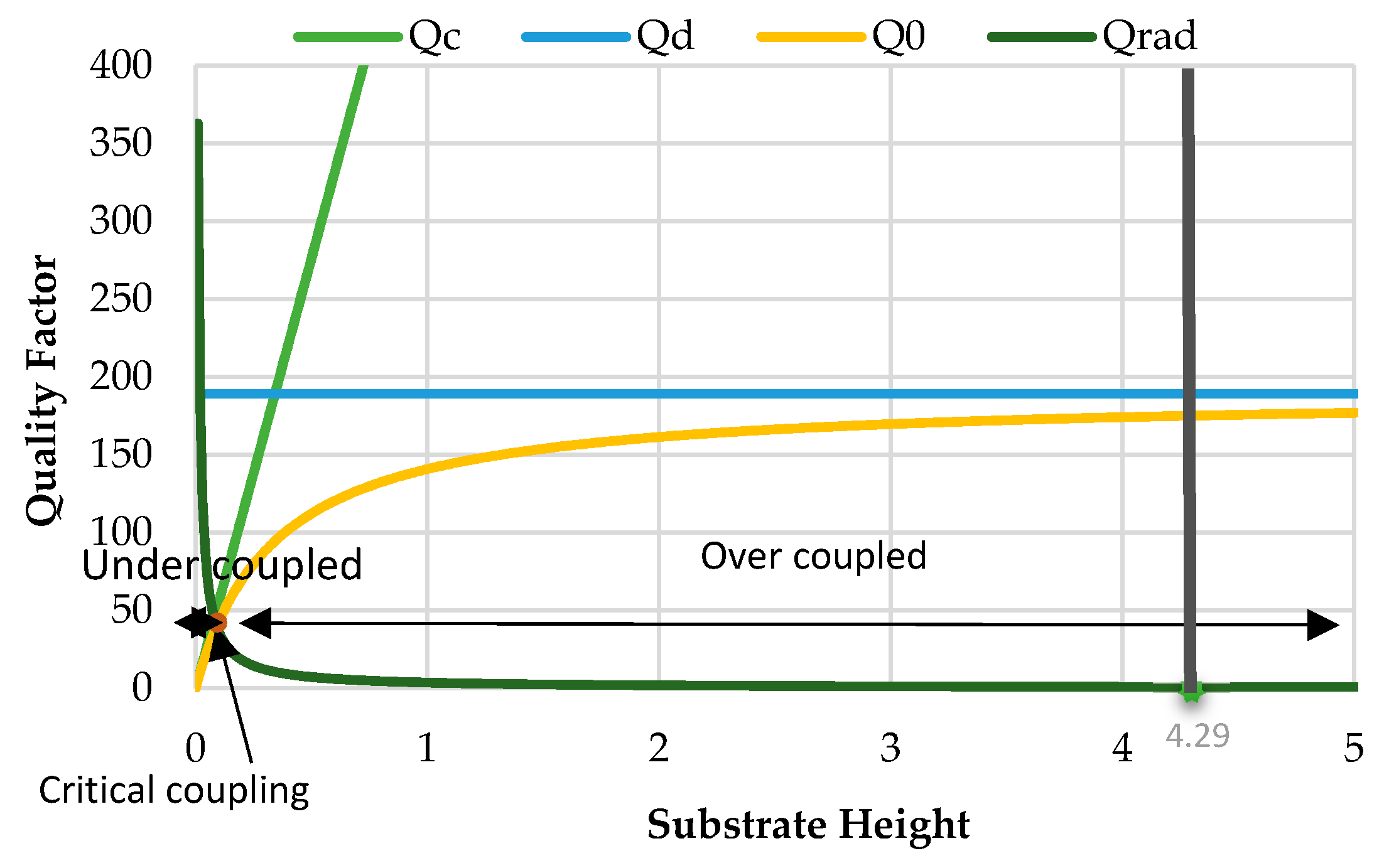
After calculating
(
Table 7), all conditions are met to calculate the quality factors and evaluate the antenna coupling. Thus, the coupling conditions are as follows [
17]:
, critical coupling;
, undercoupled; and
, overcoupled (
Figure 11).
The used diodes were the varicap diodes of Infineon BBY53-03W. These have been selected because they were closest to the antenna capacity.
The characteristics of the varicap diodes are shown in
Table 8.
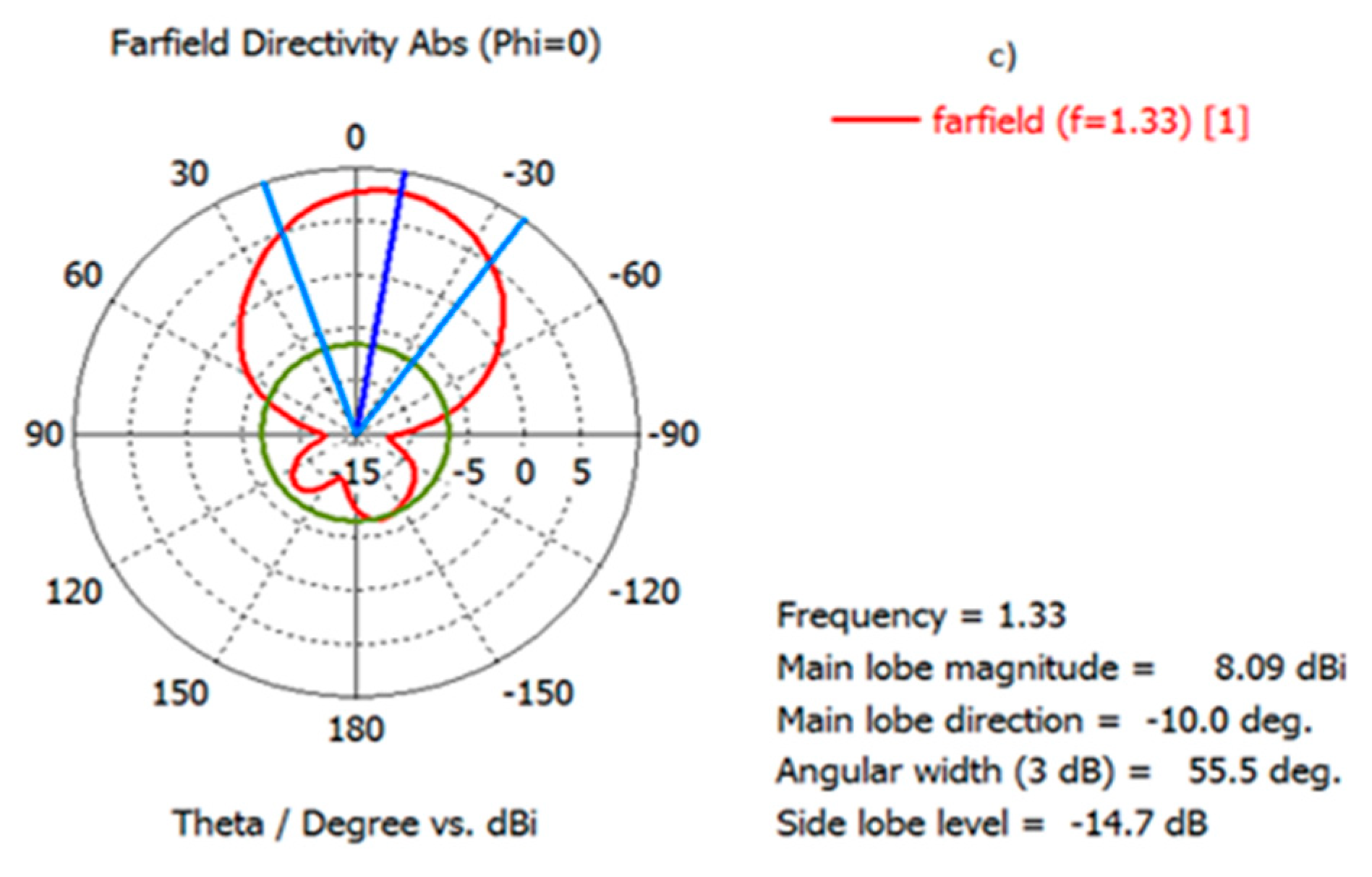
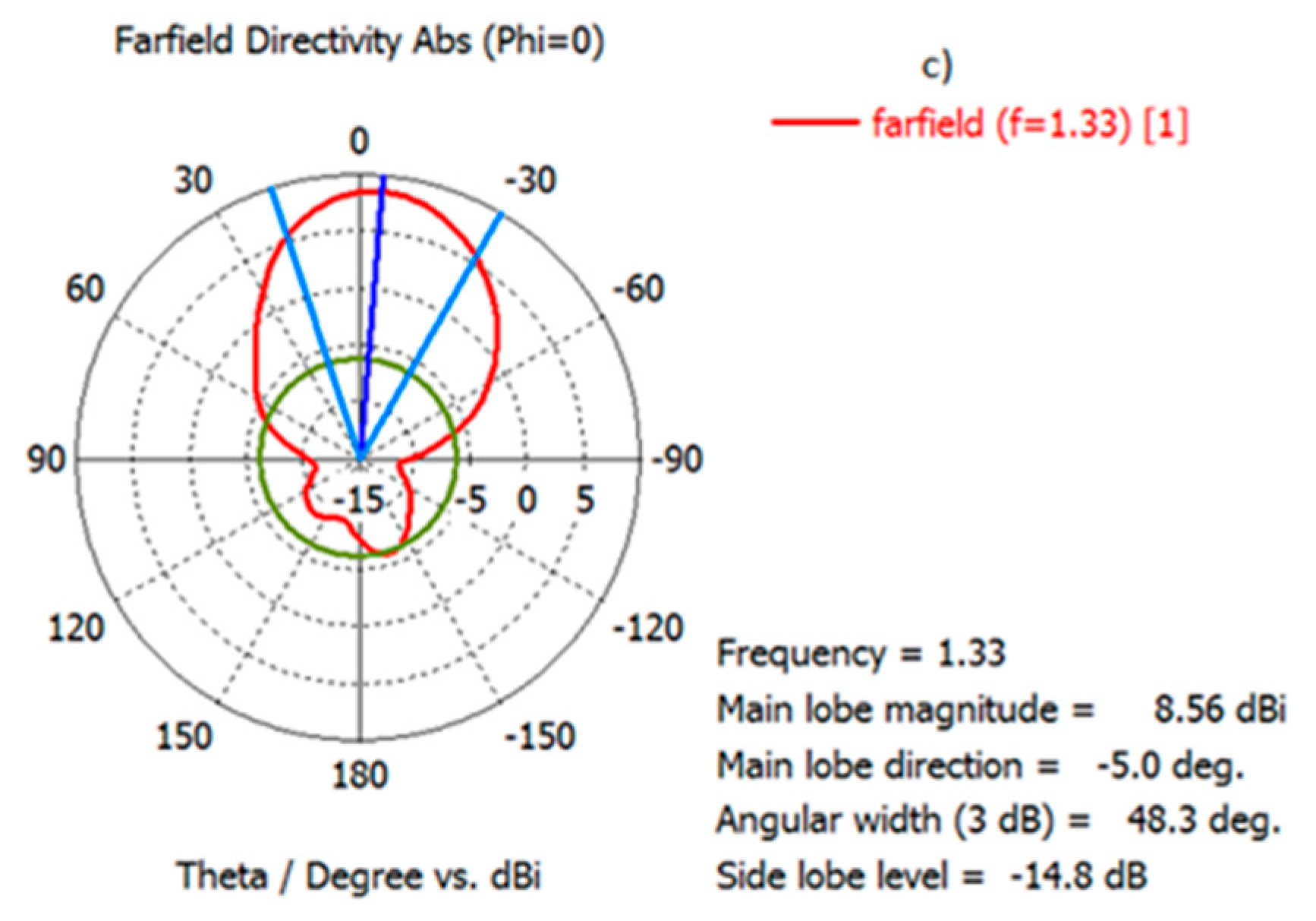
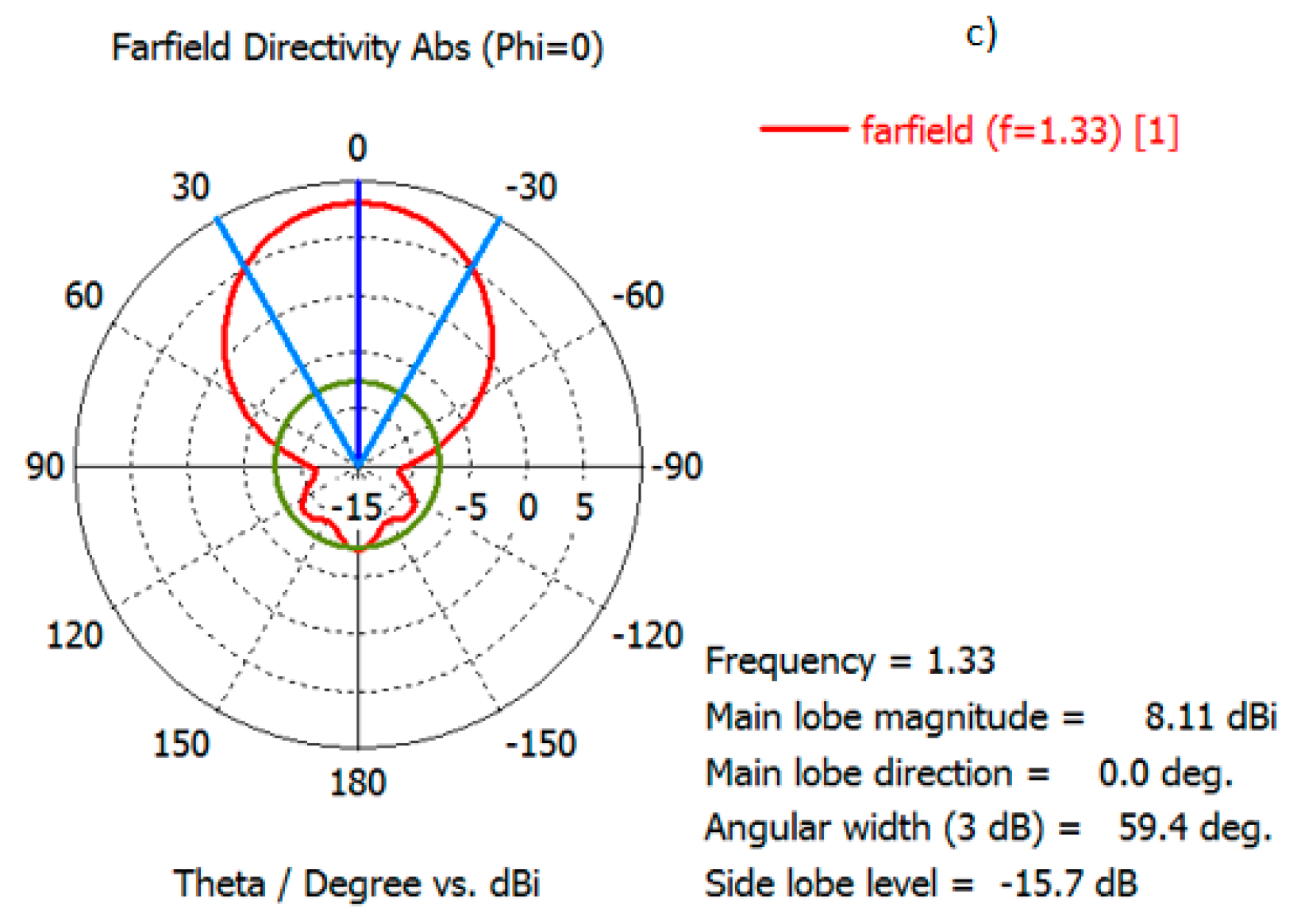
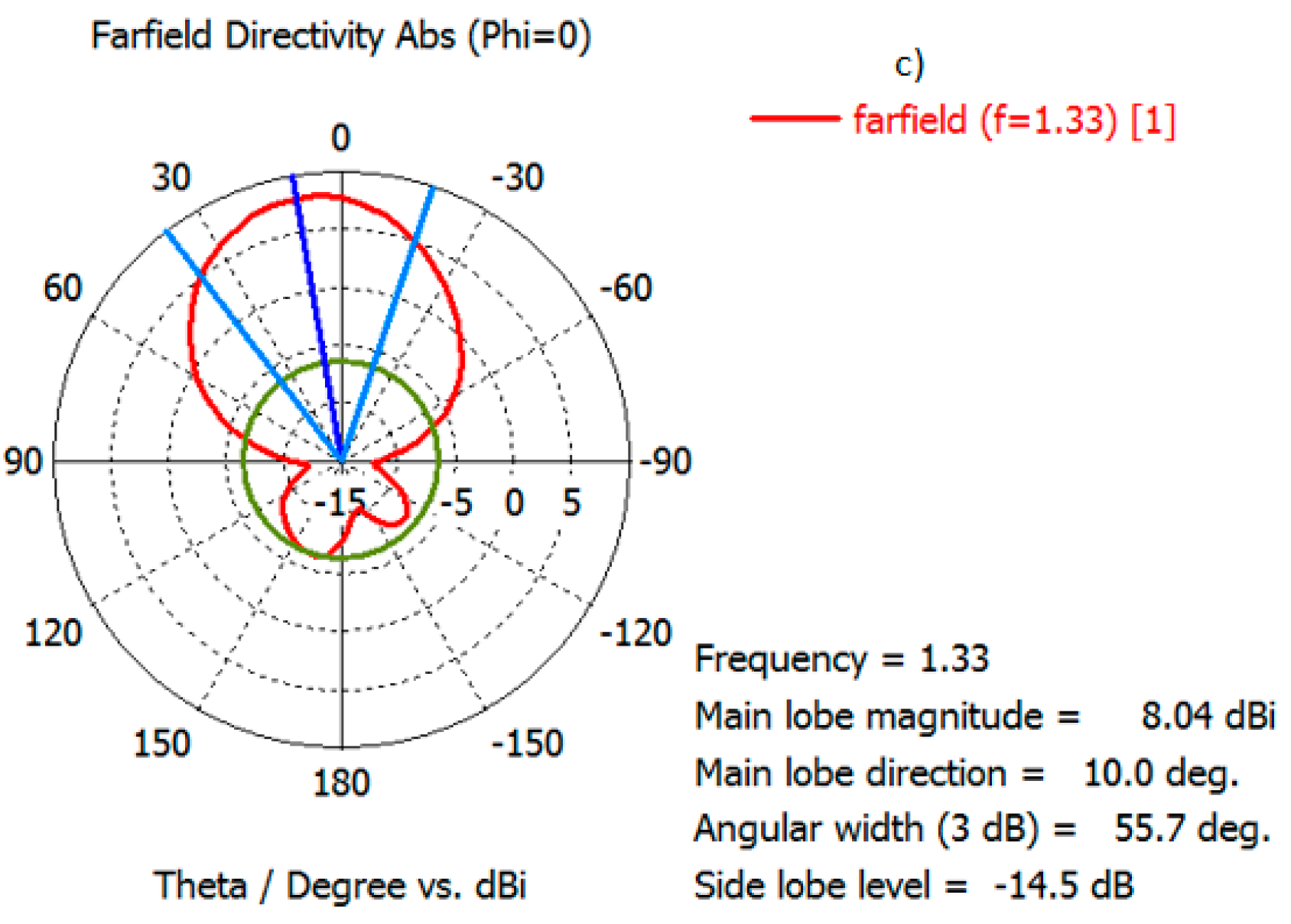
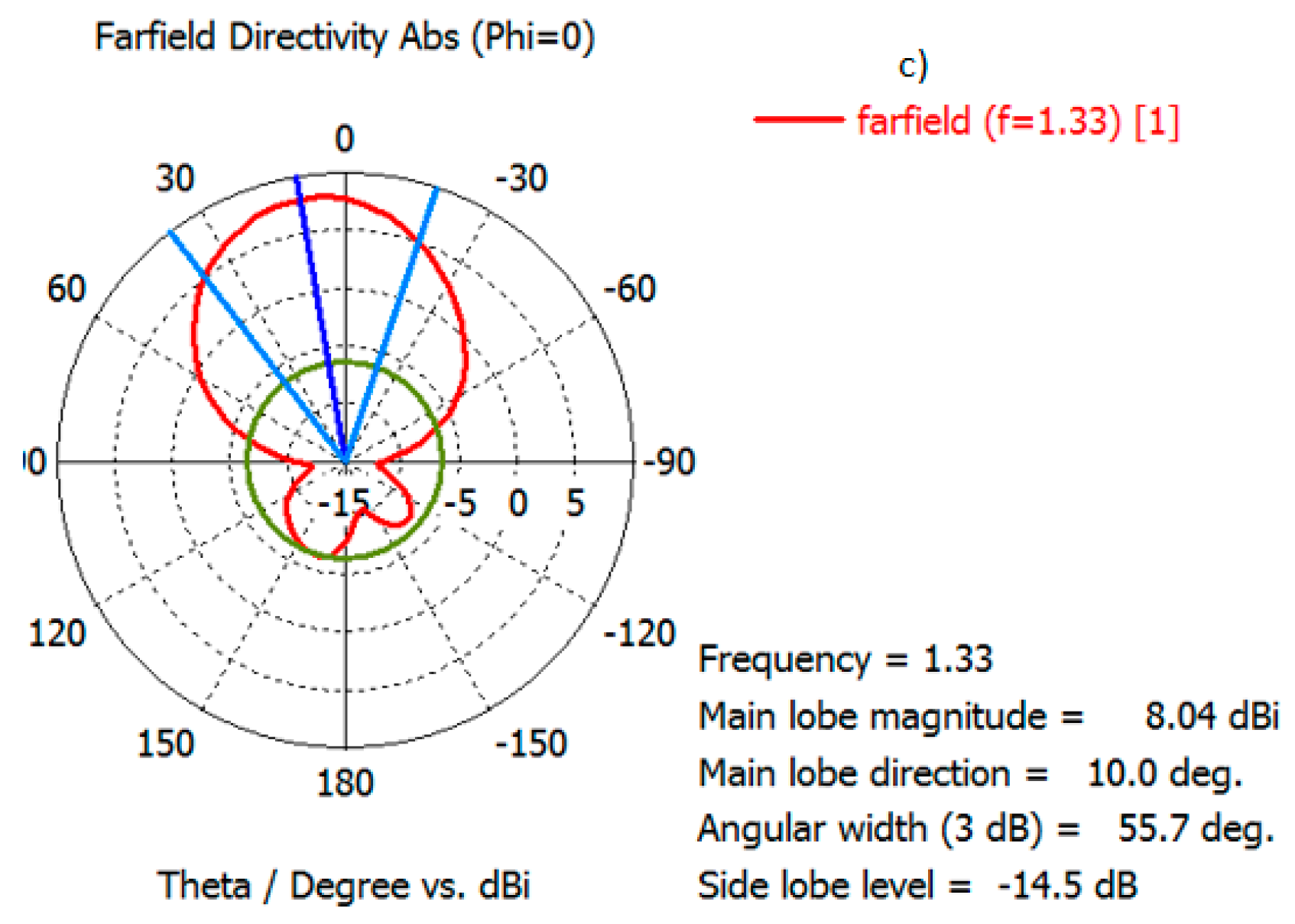
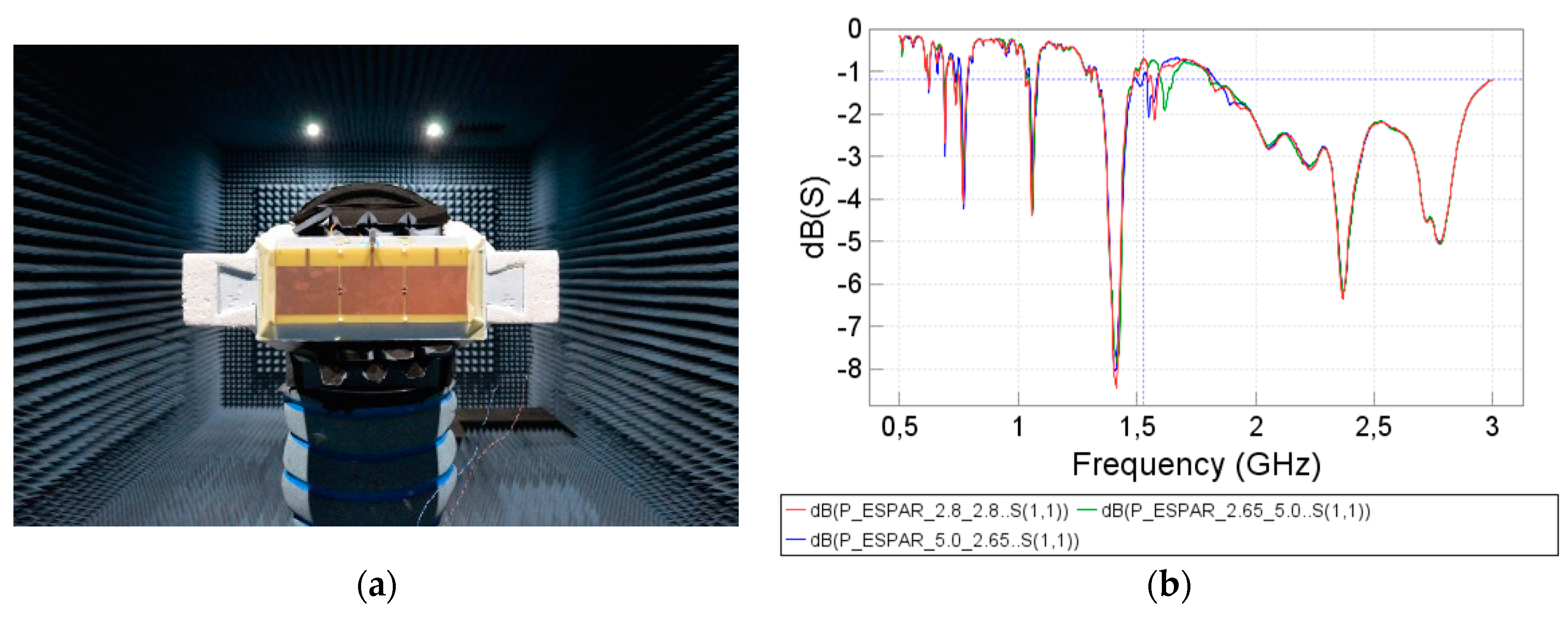
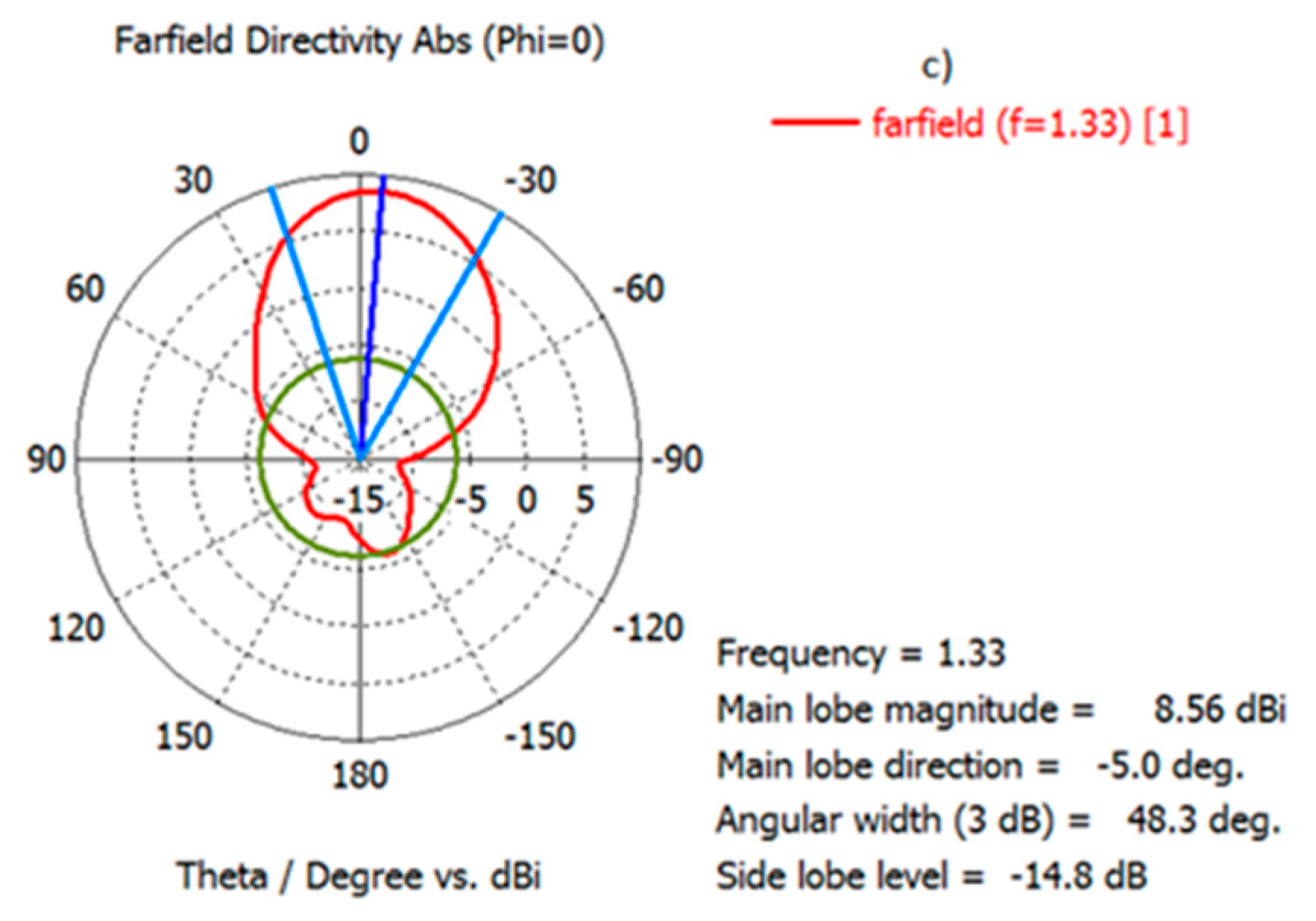
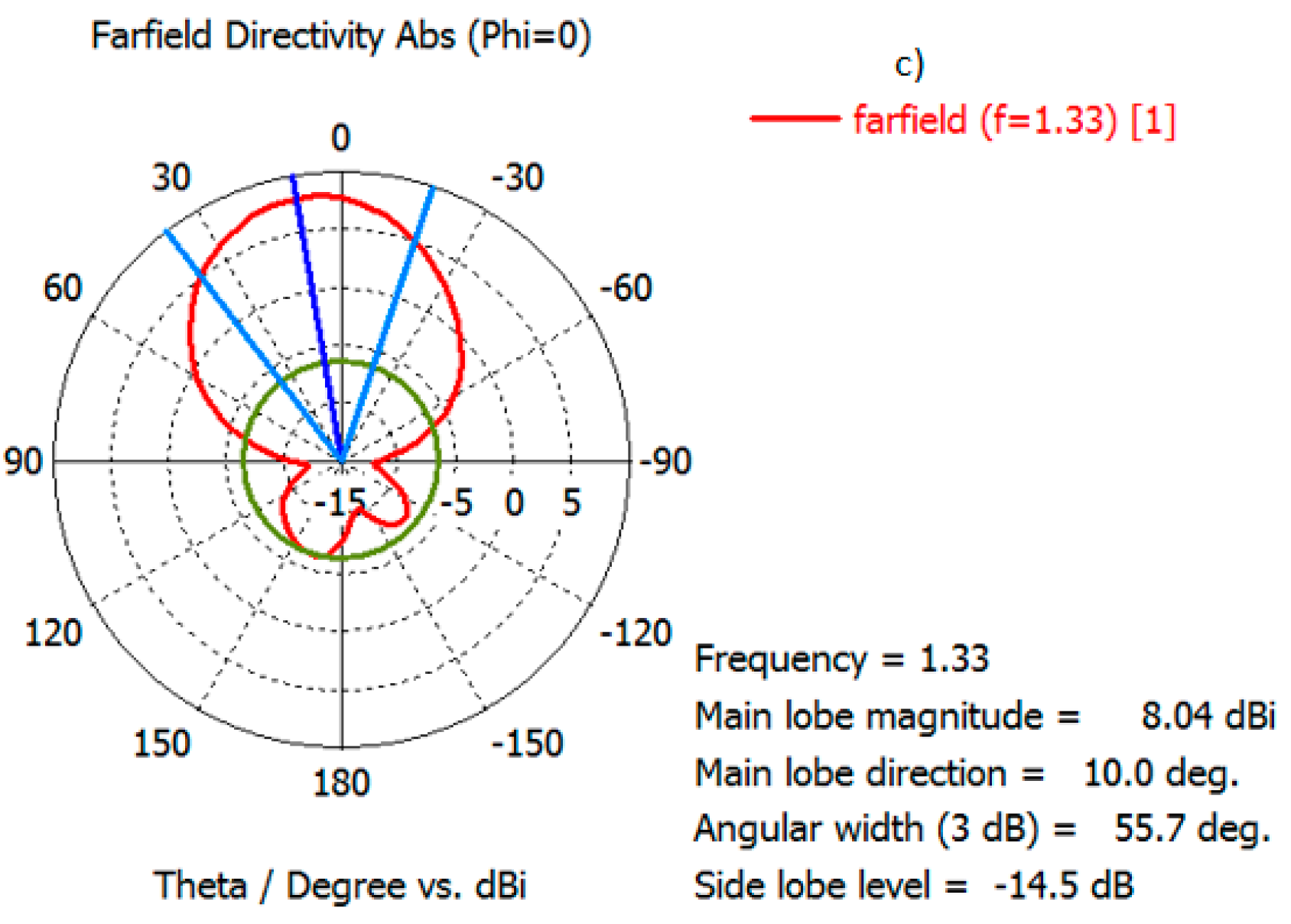
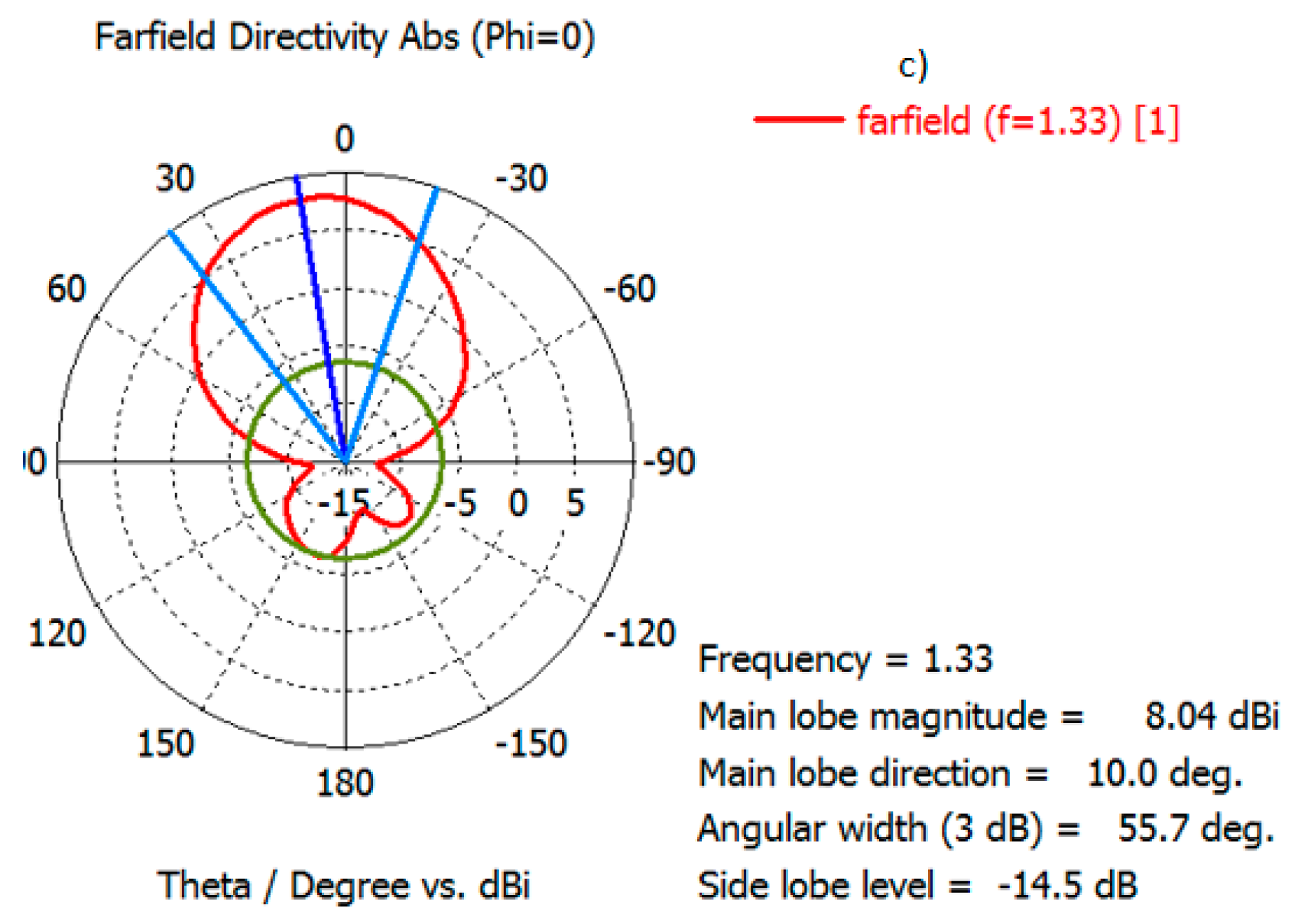
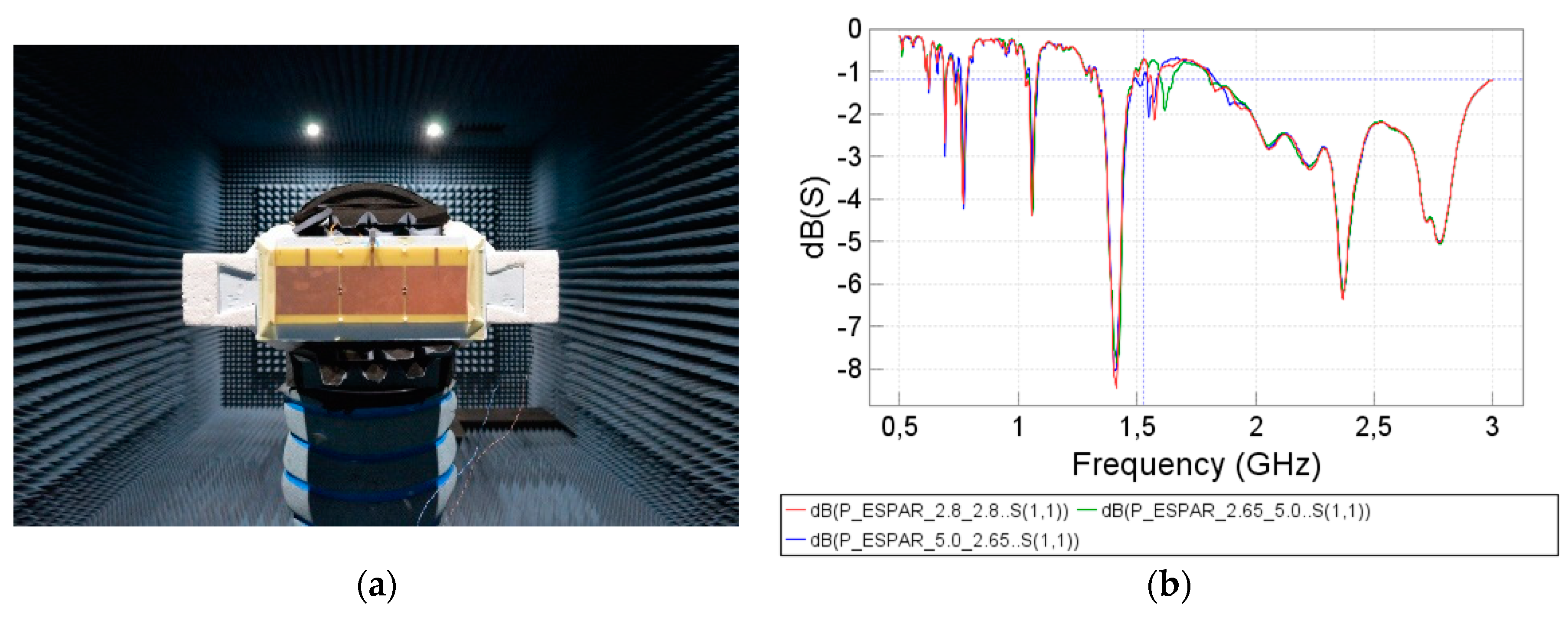
After completing the entire sizing and configuration process of the P-ESPAR antenna, the simulations were performed through the CST Microwave studio software.
After analyzing the results of
Table 9, it was possible to conclude that the imposed requirements were all fulfilled and that all the conditions for the construction and tests were gathered.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}