
A Comparative Study on Weighted Central Moment and Its Application in 2D Shape Retrieval

Abstract
:1. Introduction
2. Traditional Geometric Moment Invariants
3. Several Weighting Functions
3.1. Boundary Weighting Function
3.2. Balance Weighting Function
3.3. Central Weighting Function
4. Experimental Study
4.1. Data Set and Distance Measure
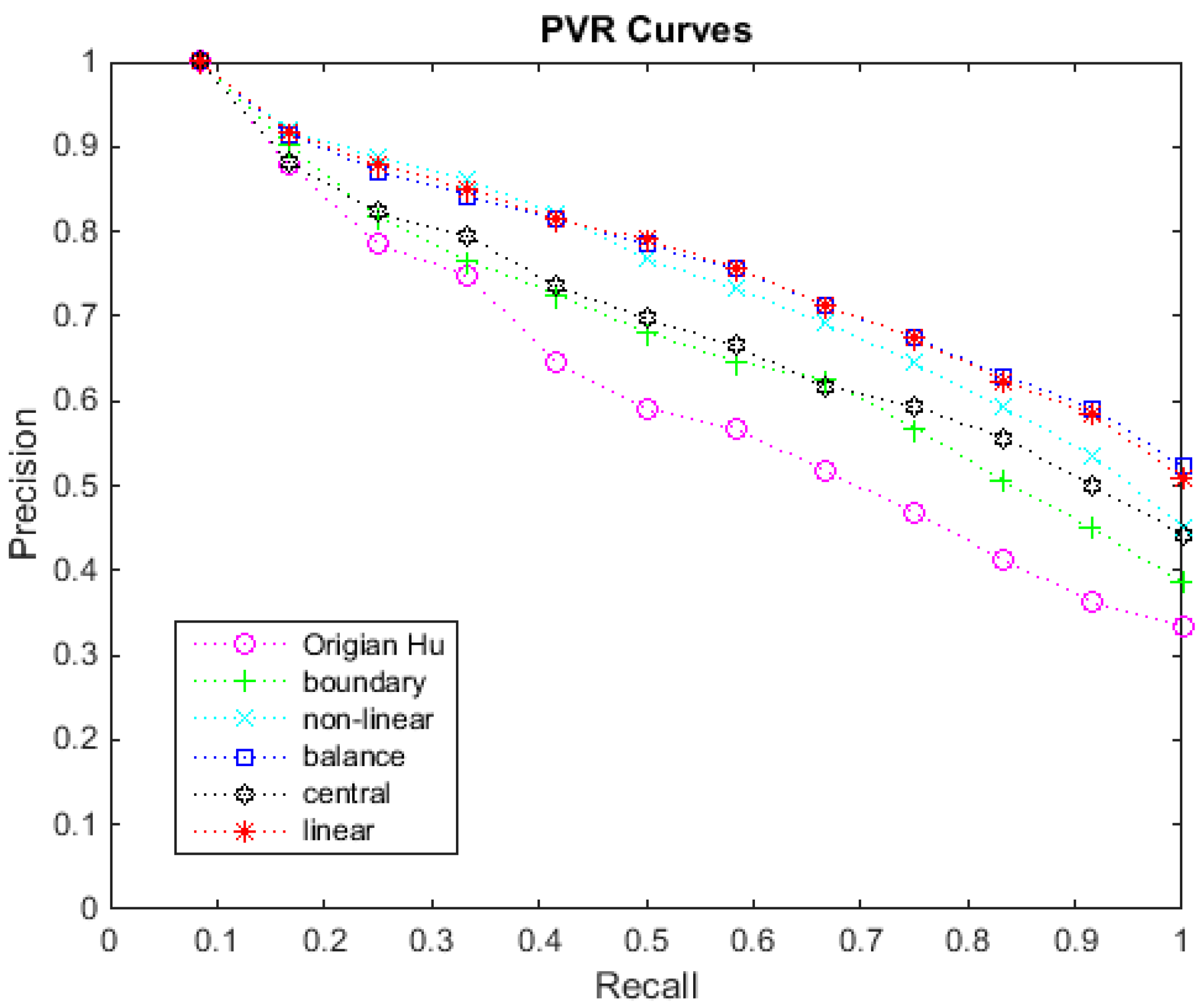
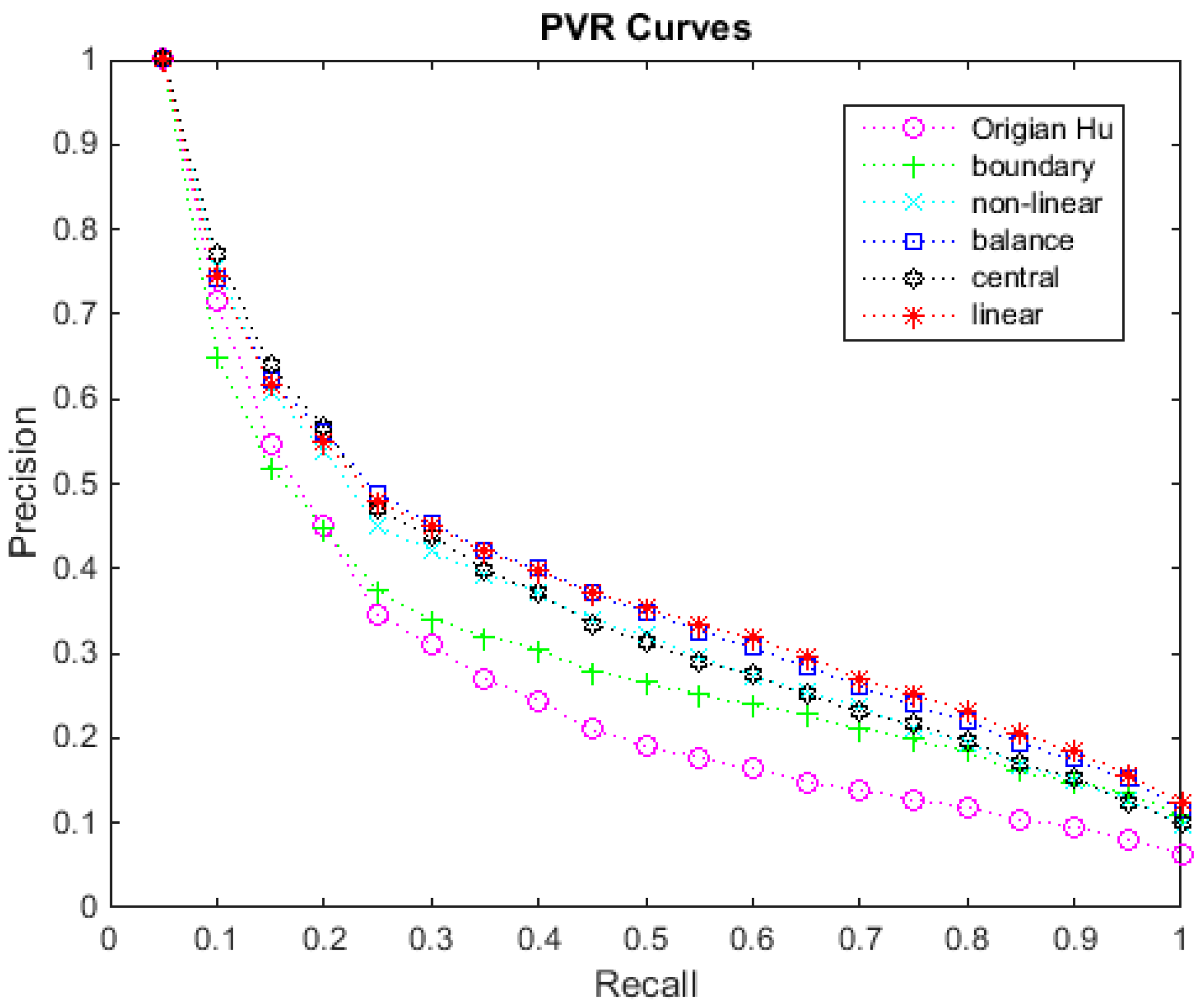
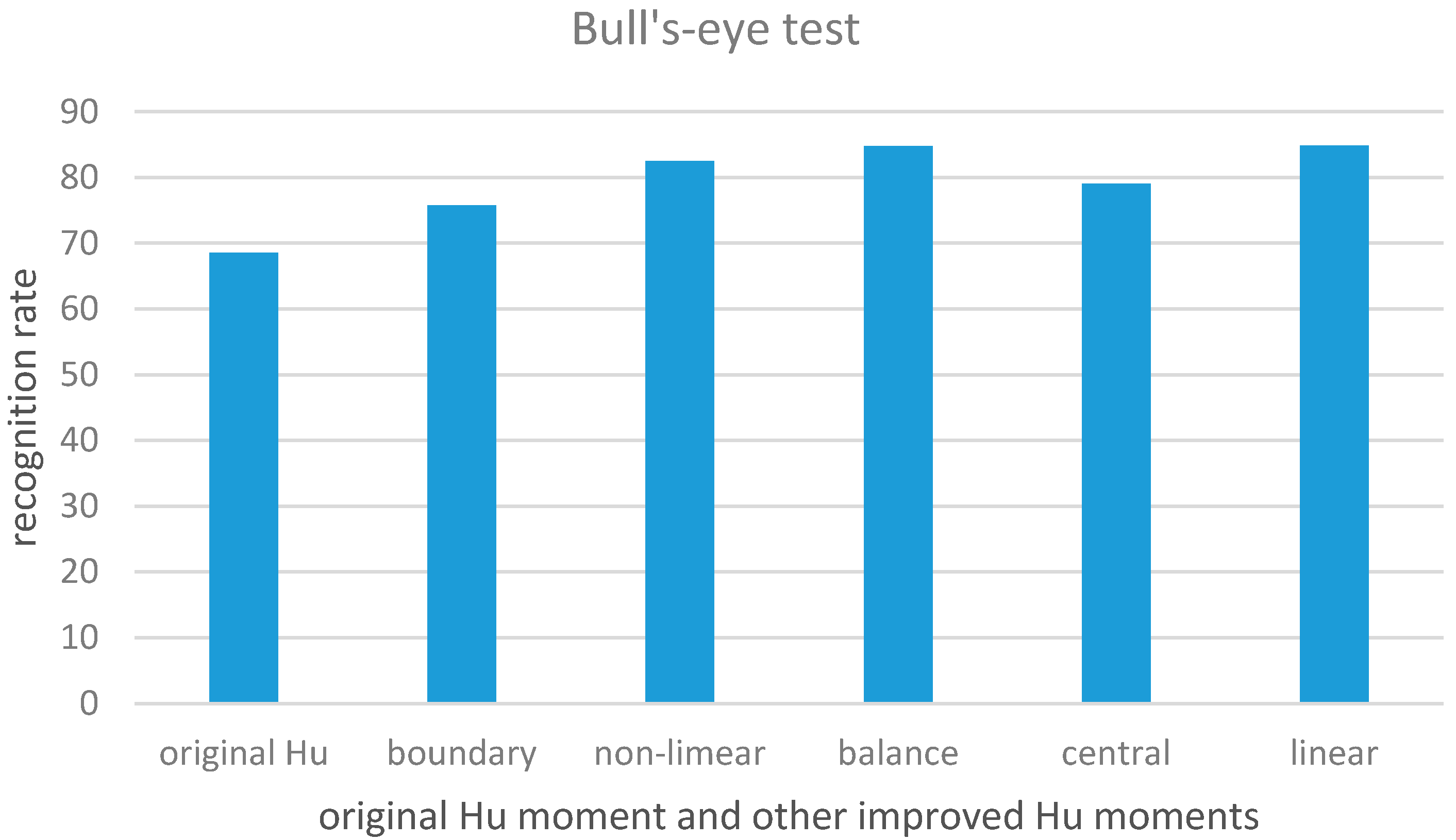
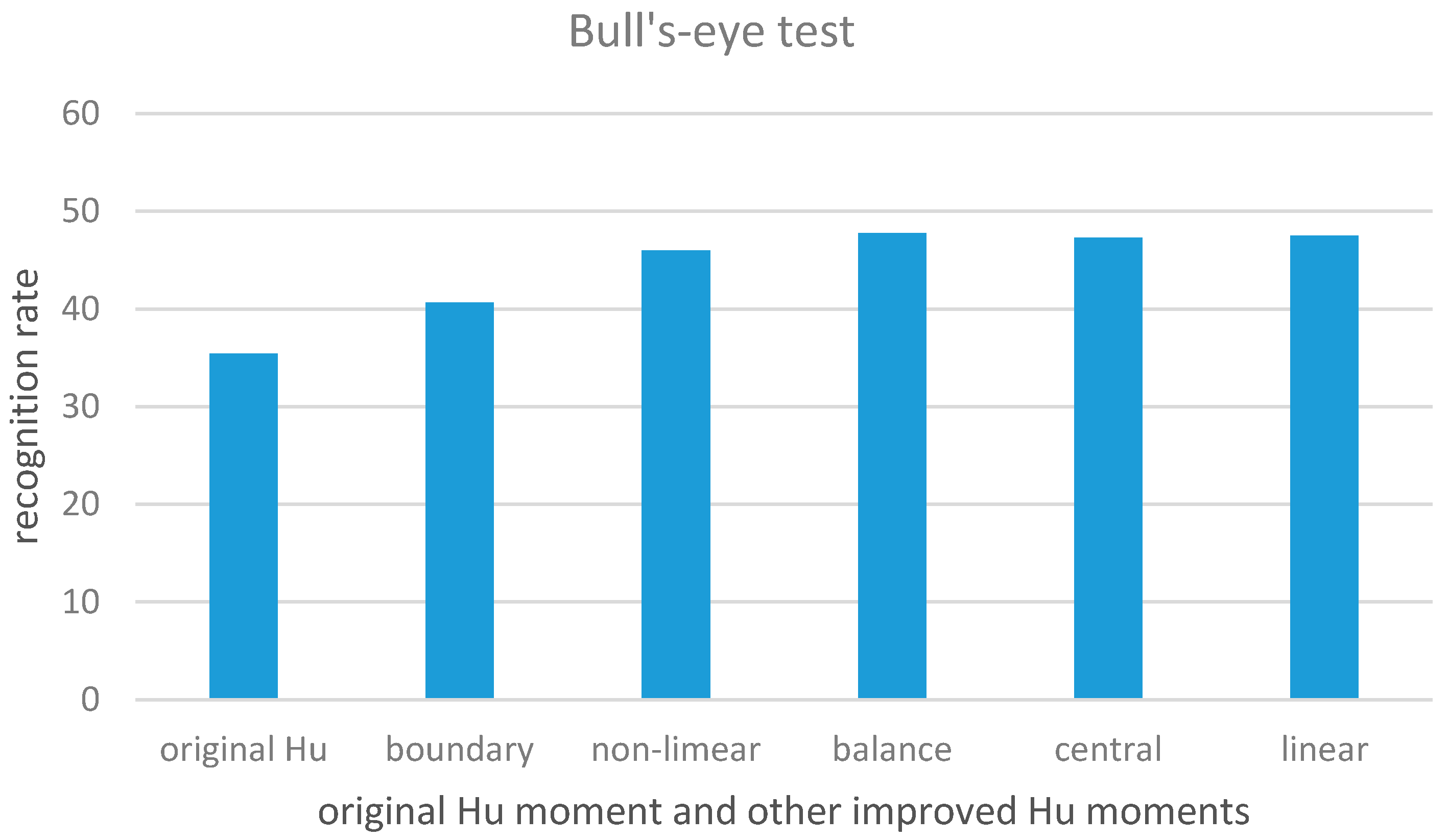
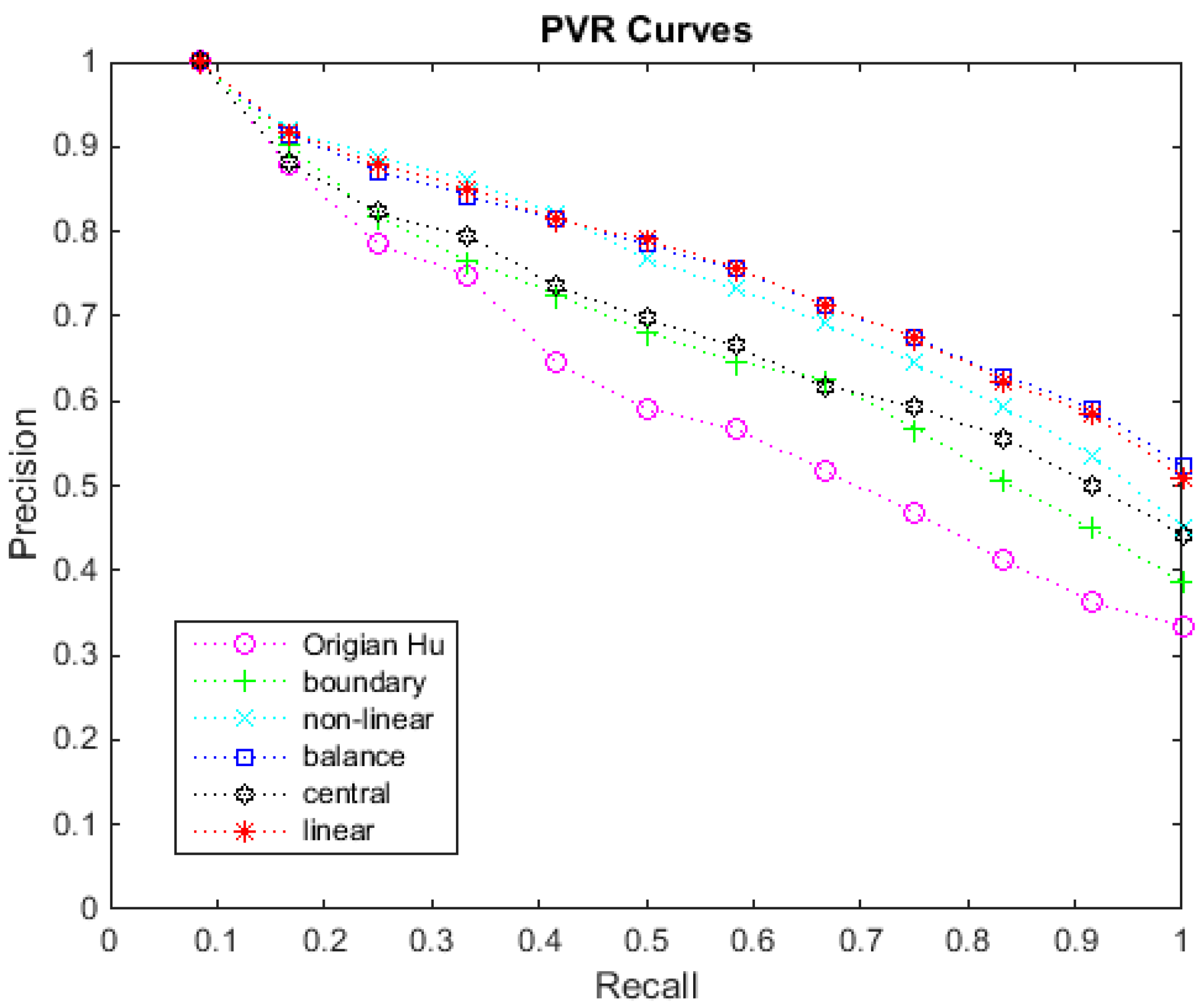
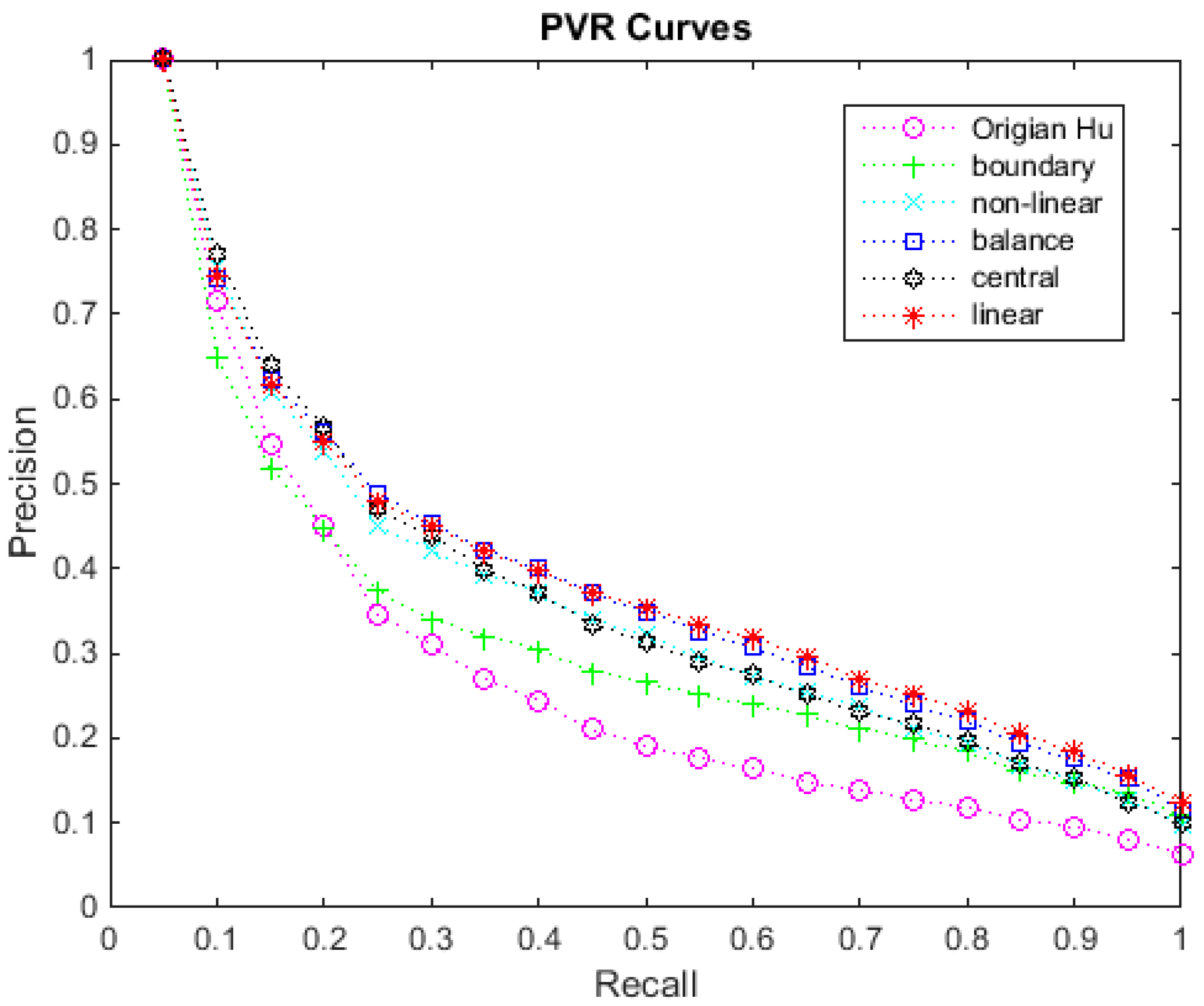
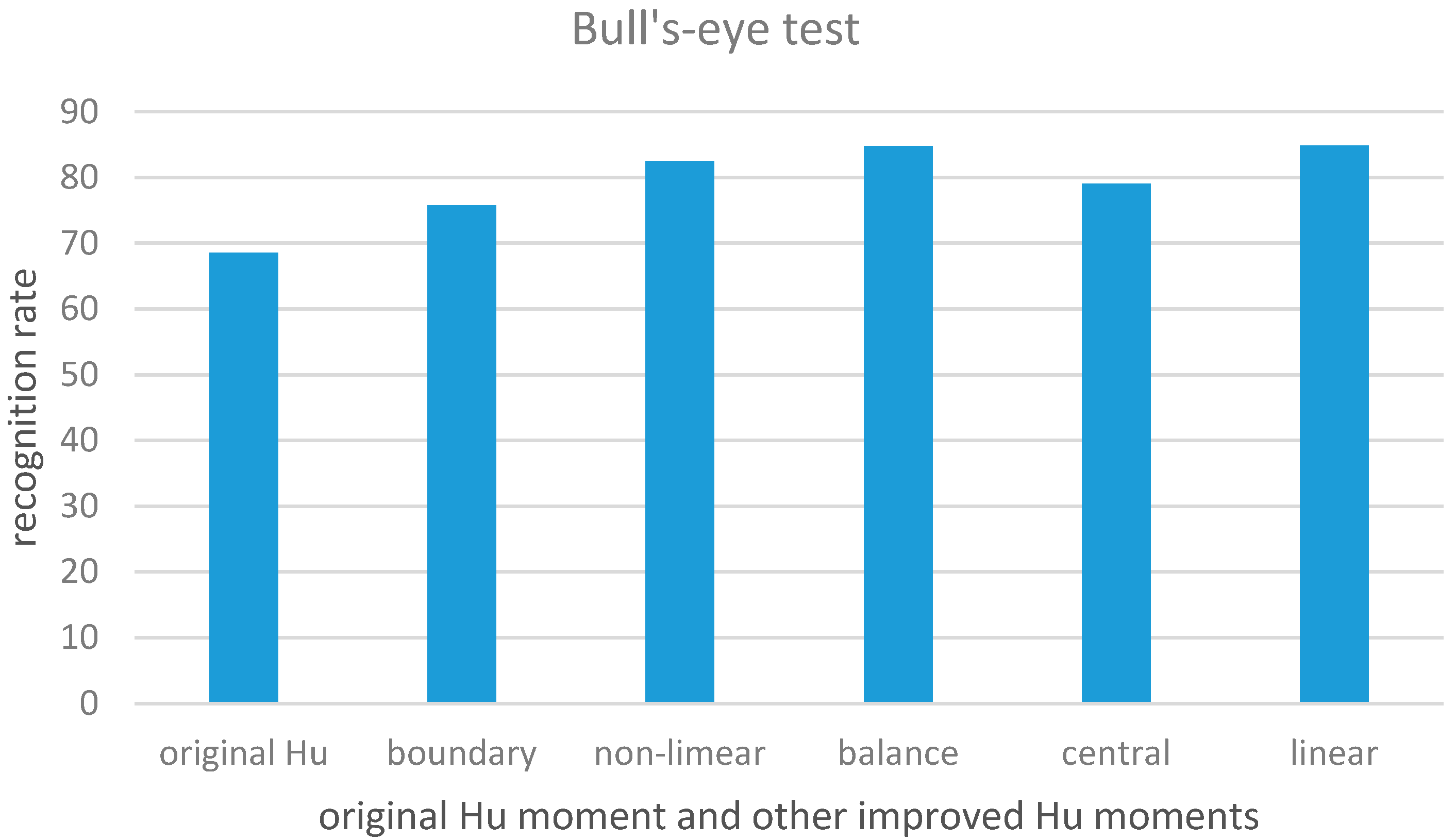
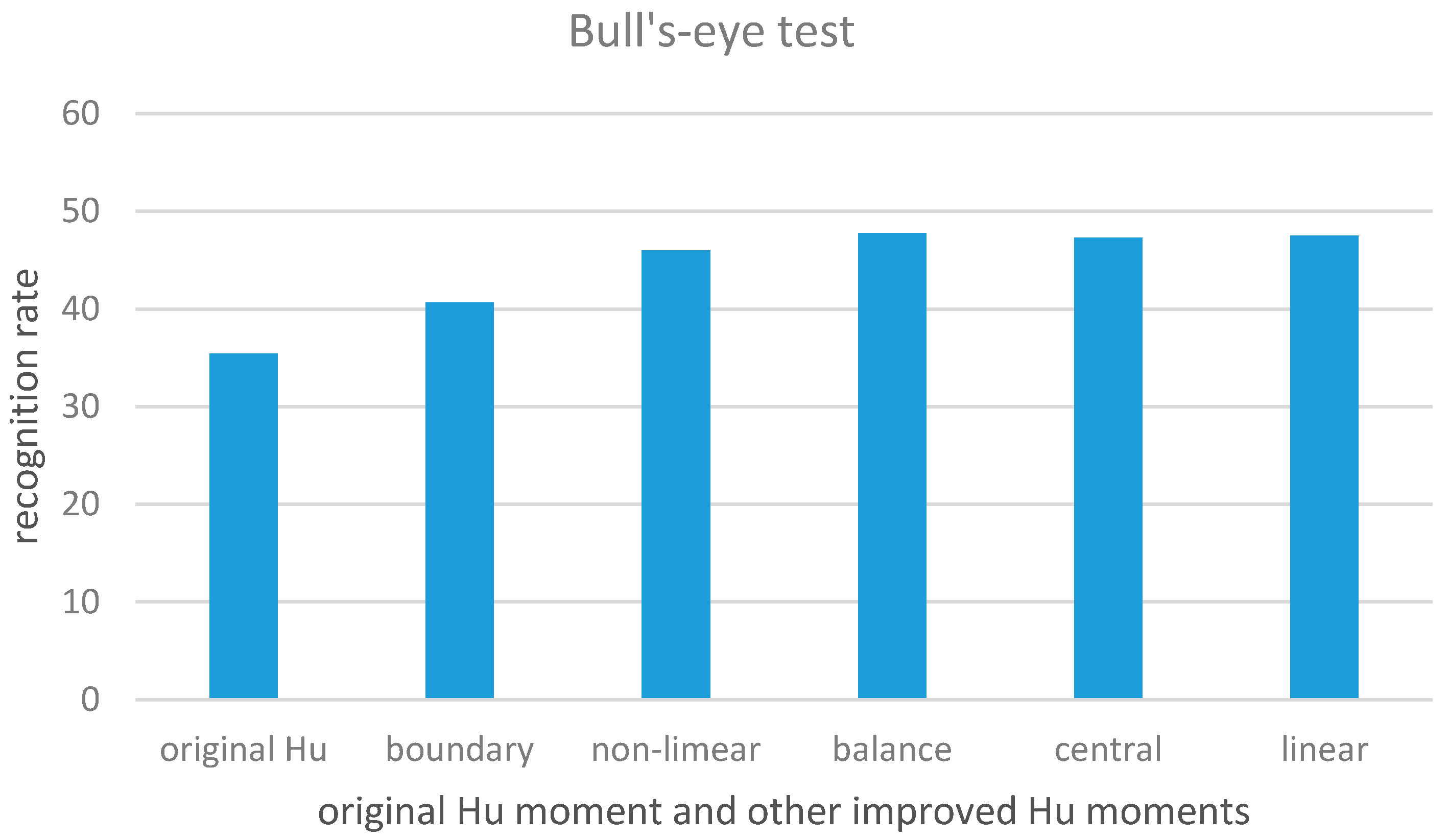
4.2. Comparative Study on the Different Weighting Approaches
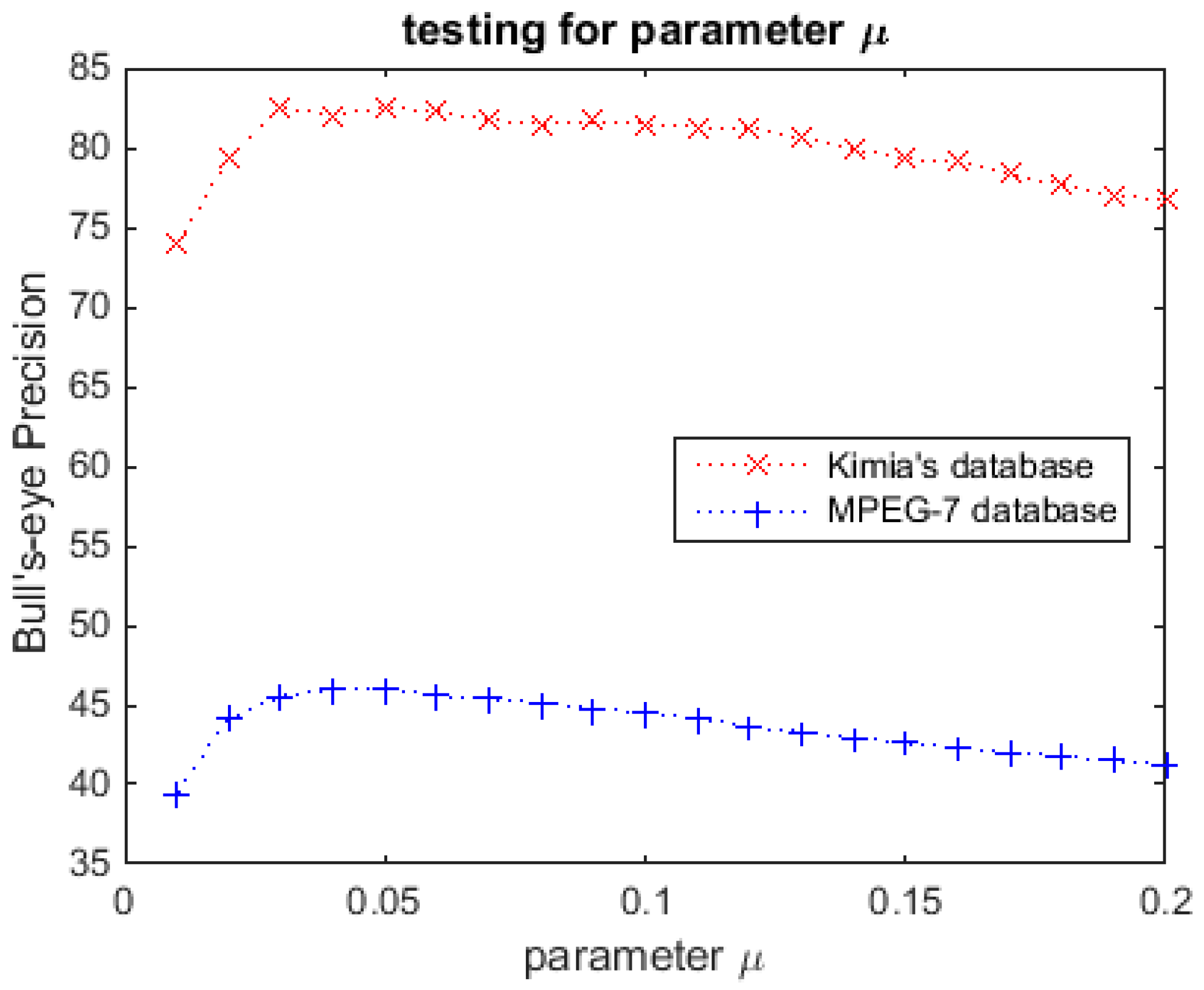
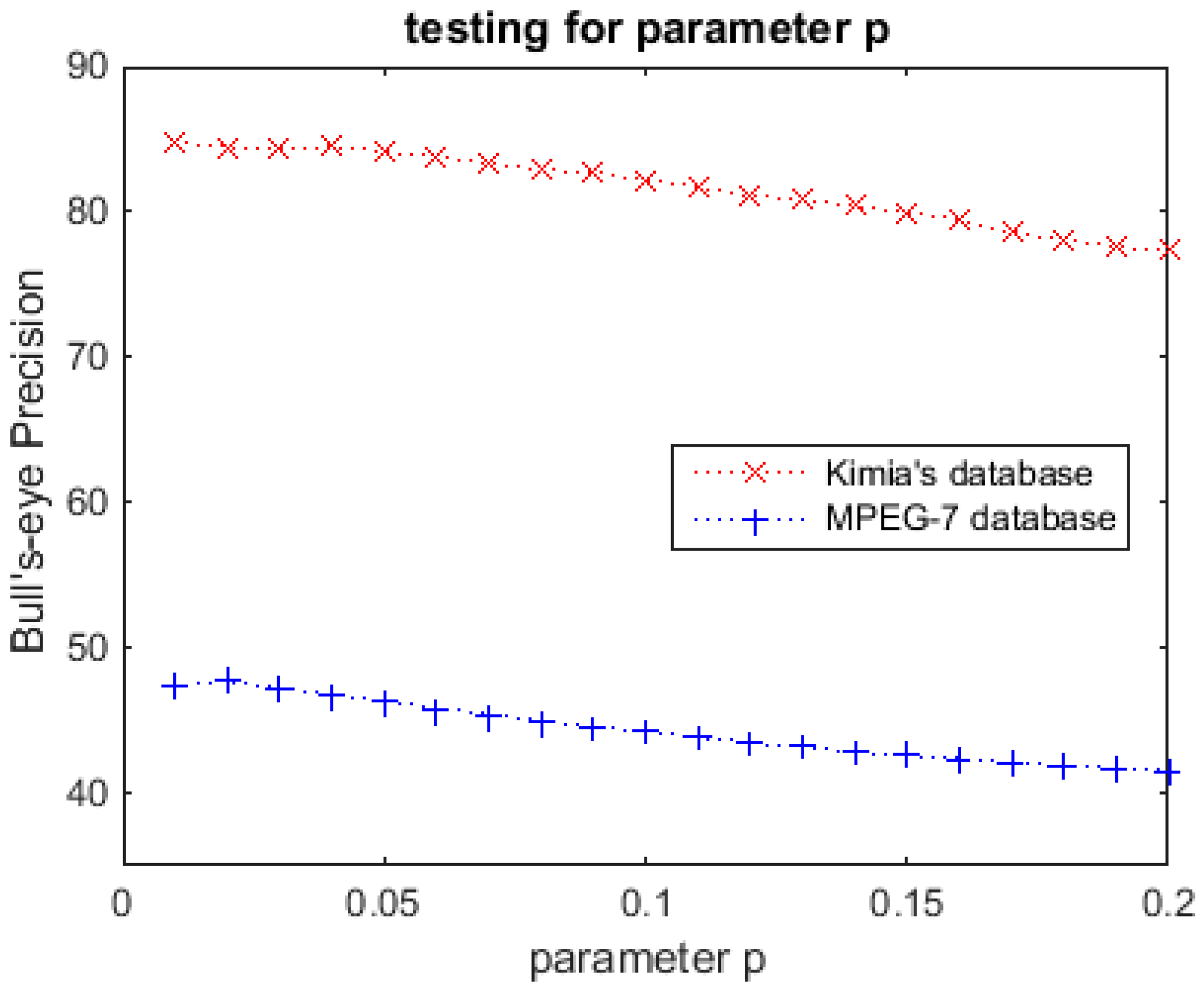
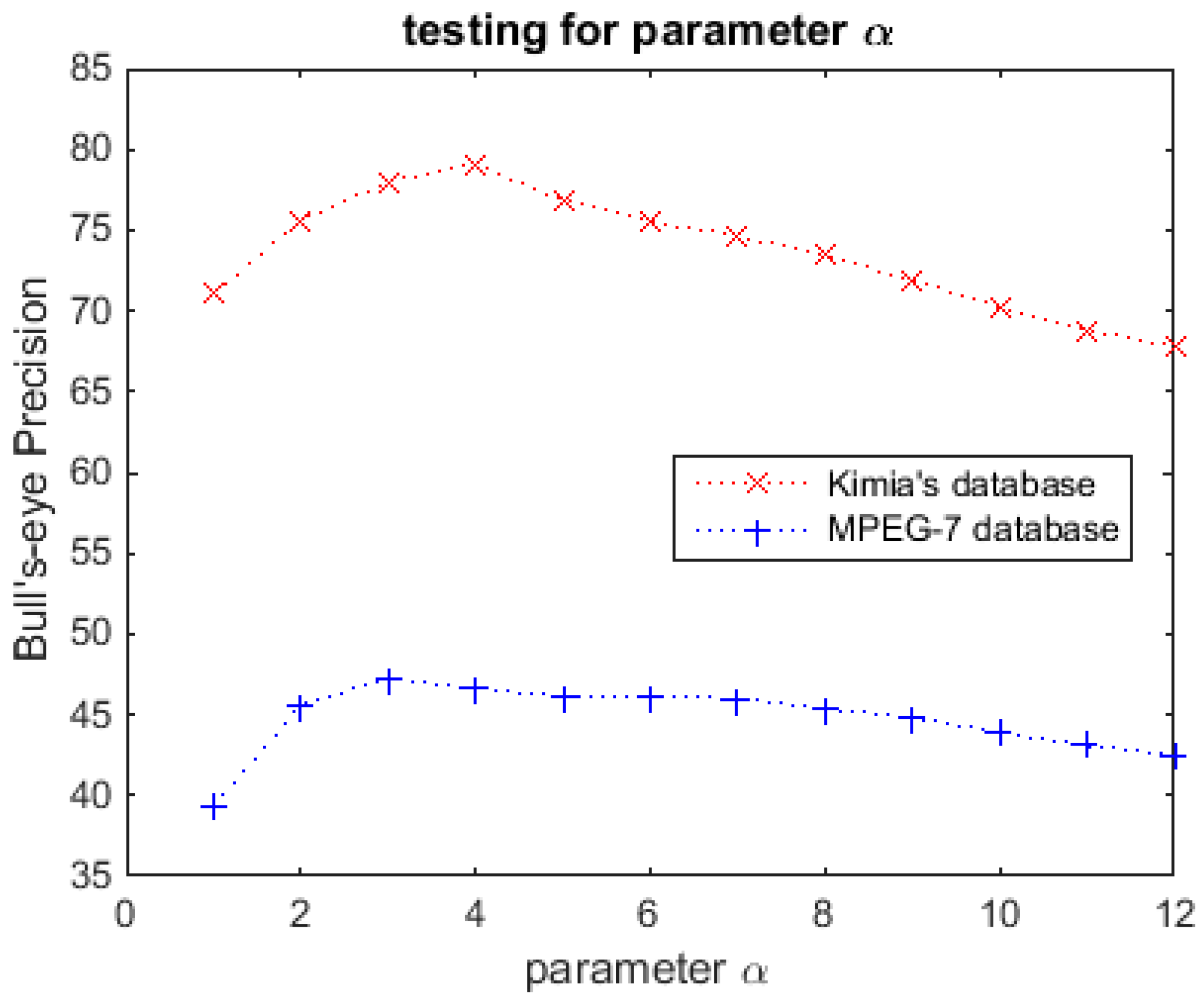
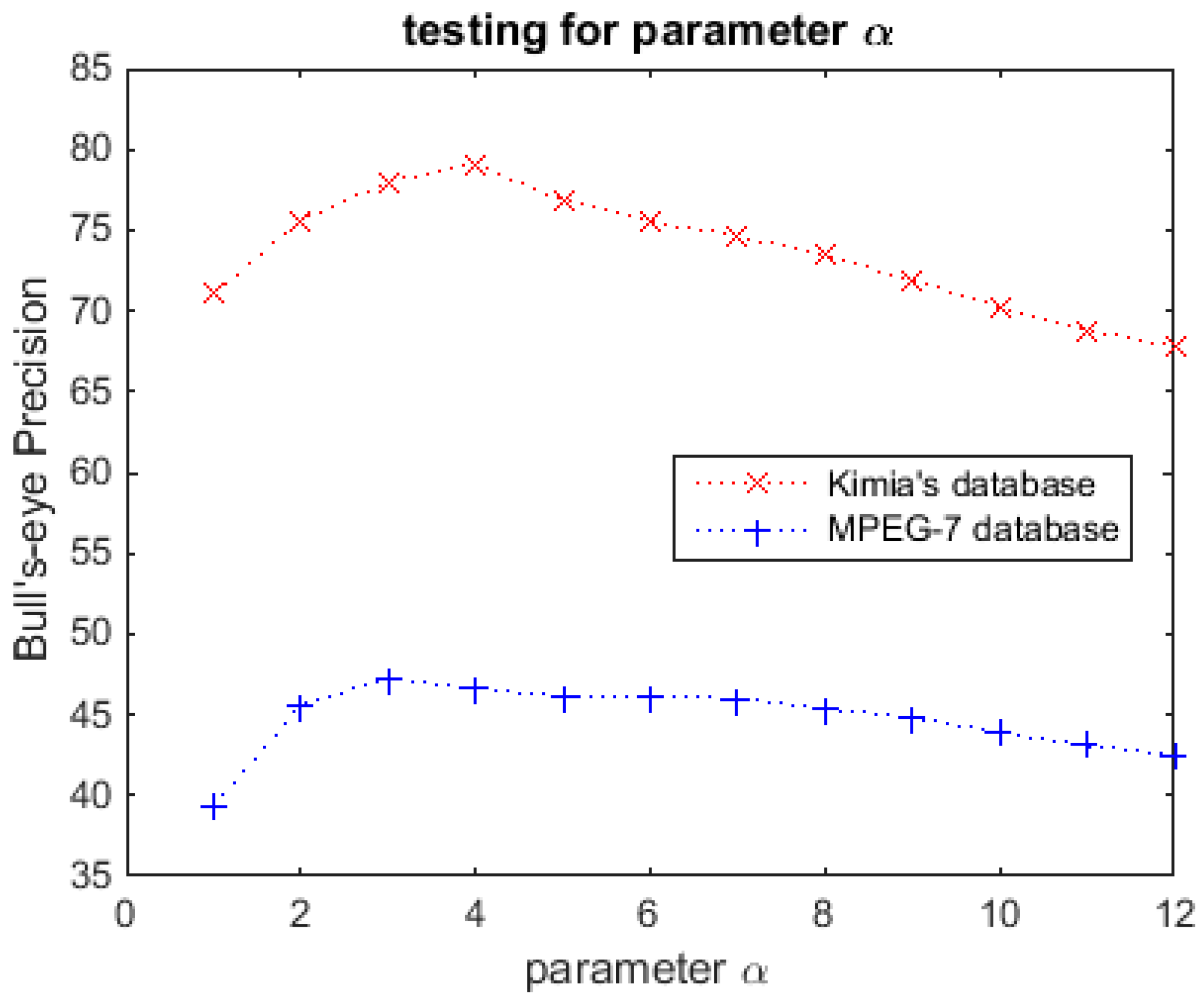
4.3. Comparative Study of the Parameters
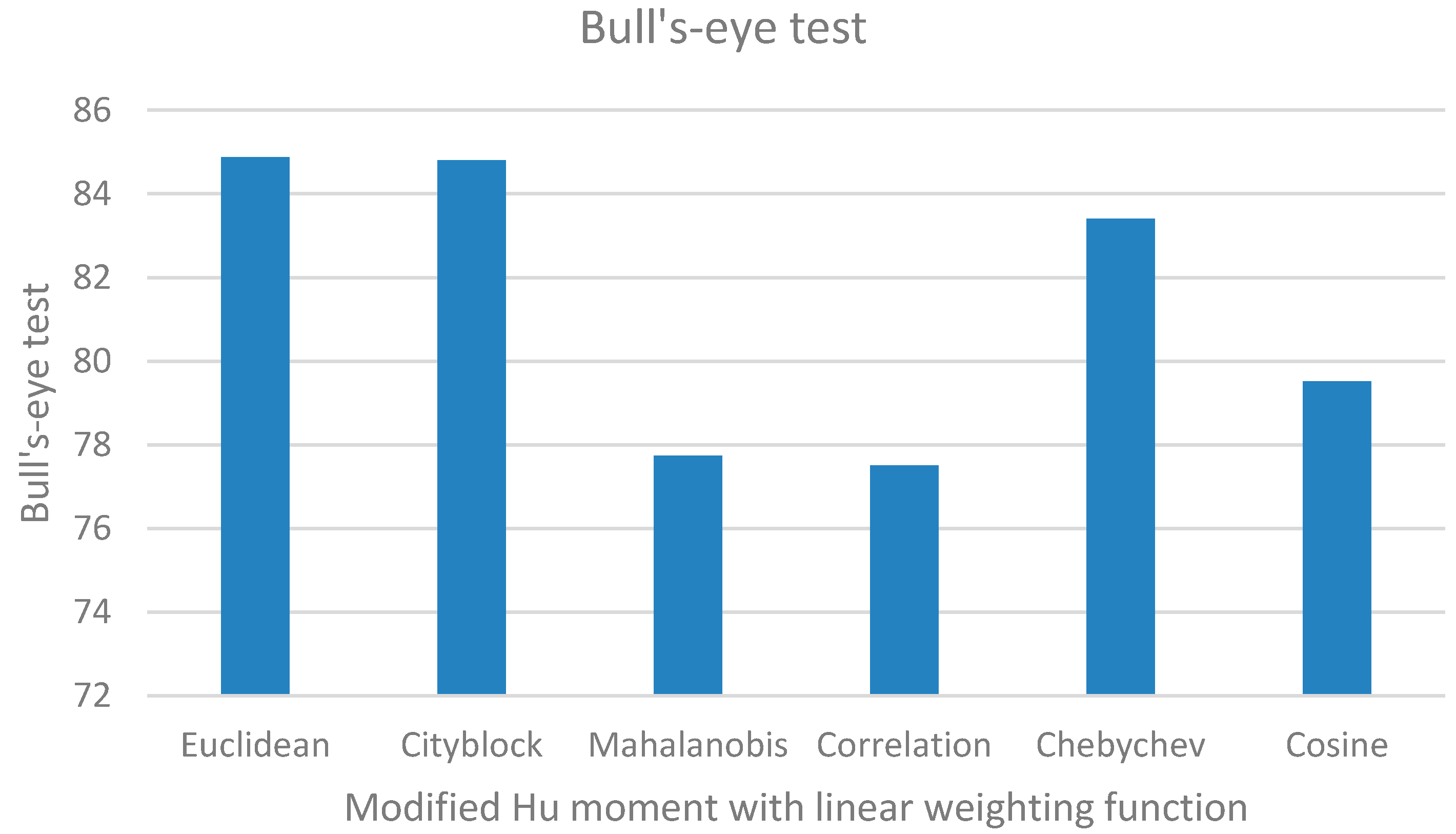
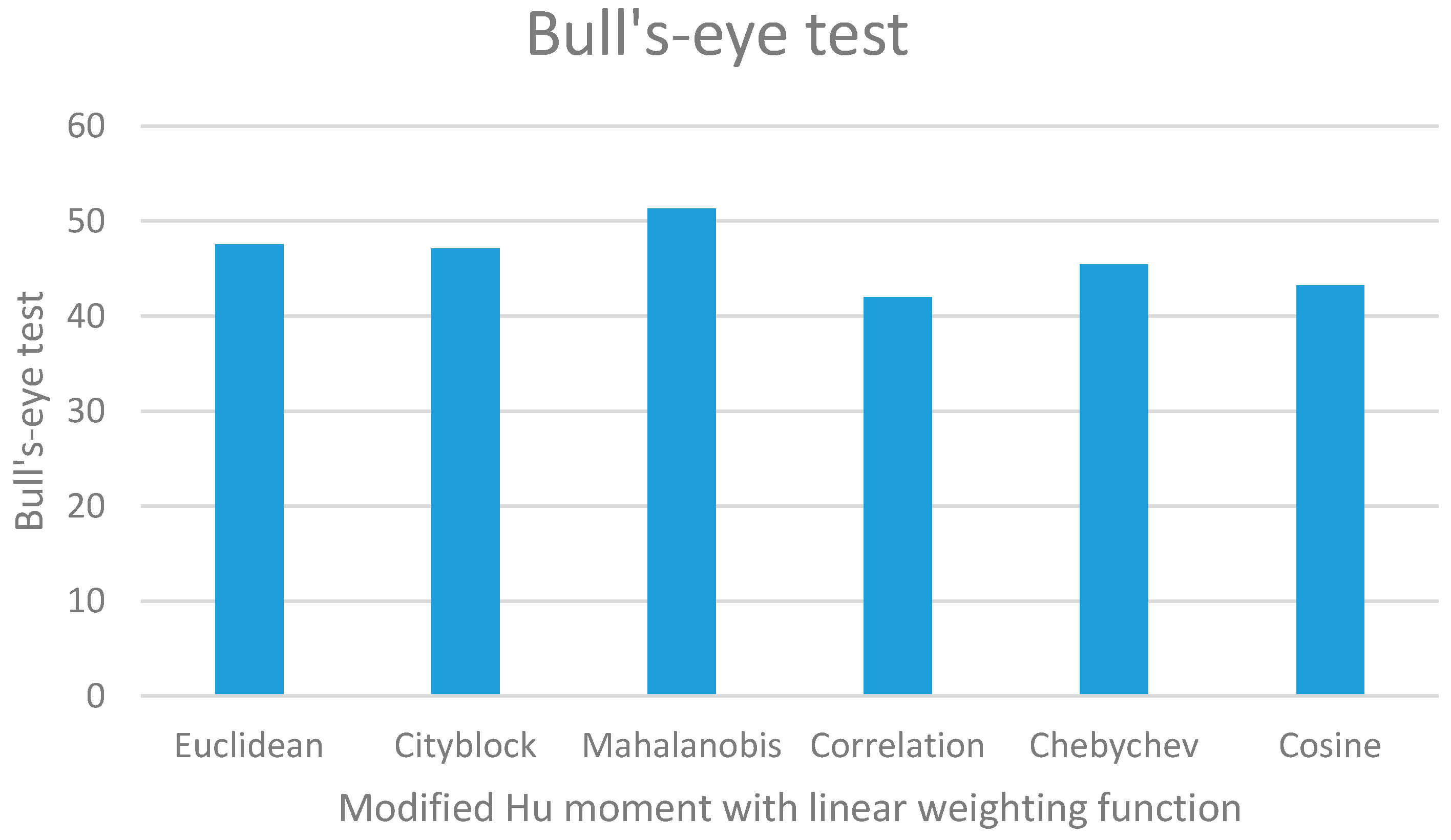
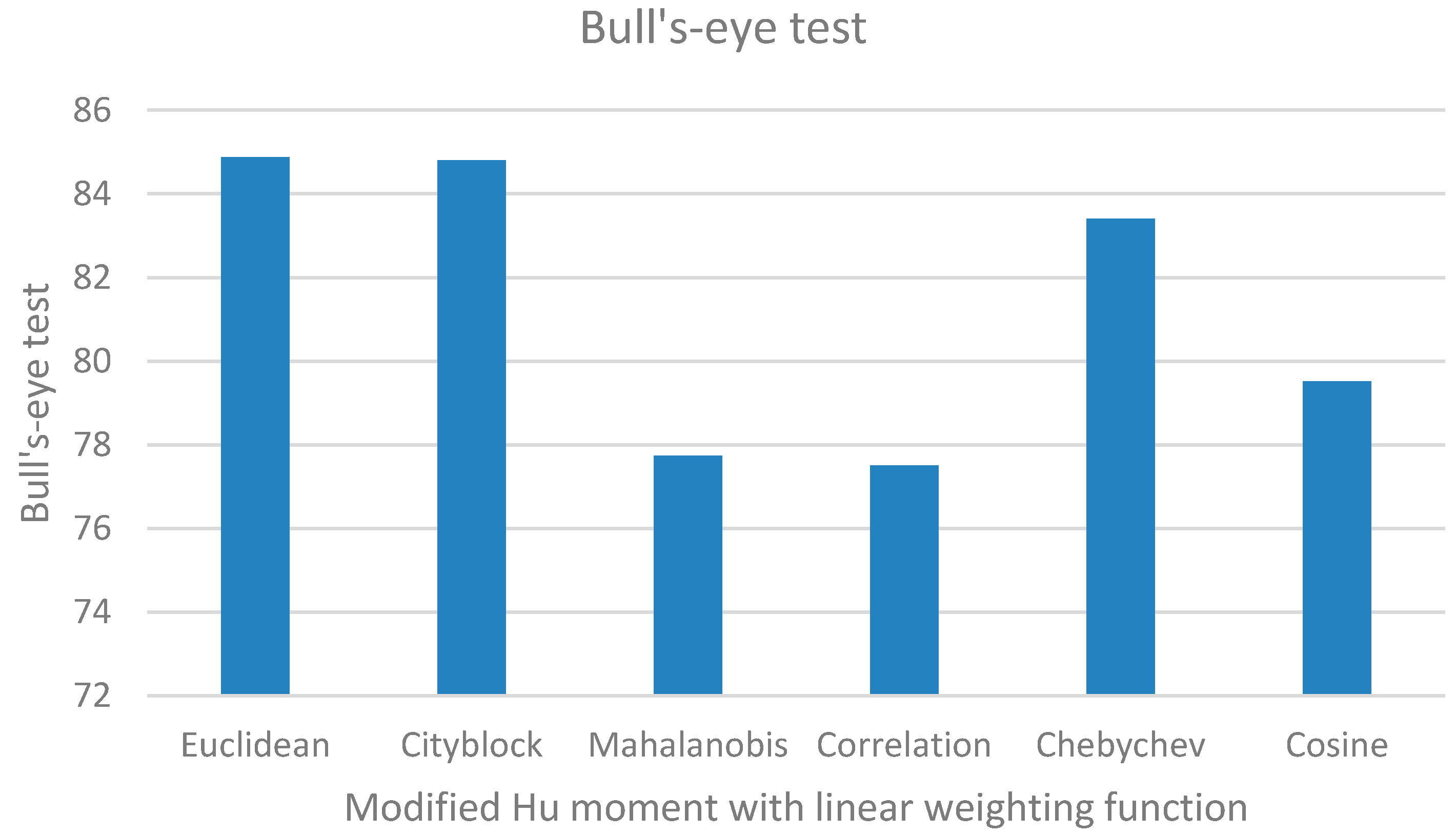
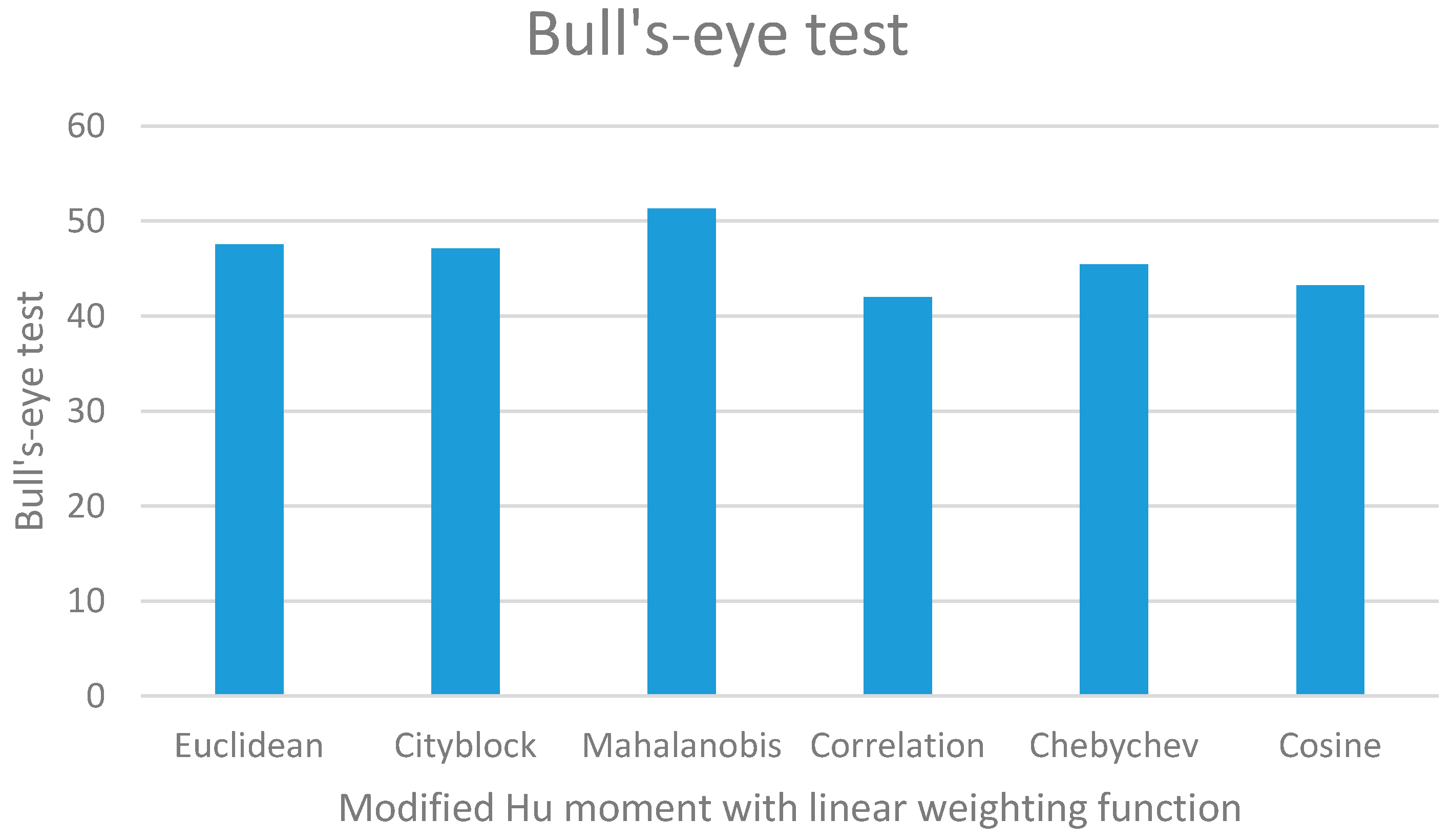
4.4. Comparative Study of Different Distance Metrics
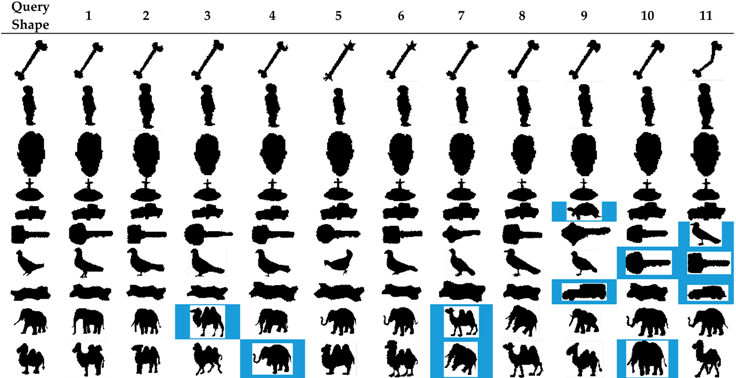
4.5. Retrieval Illustration
4.6. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhang, D.; Lu, G. Review of shape representation and description techniques. Pattern Recognit. 2004, 37, 1–19. [Google Scholar] [CrossRef]
- Hu, M.K. Visual pattern recognition by moment invariants. IRE Trans. Inform. Theory 1962, 8, 179–187. [Google Scholar]
- Kim, W.Y.; Kim, Y.S. A region-based shape descriptor using Zernike moments. Signal Process. Image Commun. 2000, 16, 95–102. [Google Scholar] [CrossRef]
- Chong, C.W.; Raveendran, P.; Mukundan, R. Translation invariants of Zernike moments. Pattern Recognit. 2003, 36, 1765–1773. [Google Scholar] [CrossRef]
- Belkasim, S.; Hassan, E.; Obeidi, T. Explicit invariance of Cartesian Zernike moments. Pattern Recognit. Lett. 2007, 28, 1969–1980. [Google Scholar] [CrossRef]
- Hosny, K.M. Exact Legendre moments computation for gray level images. Pattern Recognit. 2007, 40, 3597–3605. [Google Scholar] [CrossRef]
- Fu, B.; Zhou, J.Z.; Li, Y.H.; Zhang, G.J.; Wang, C. Image analysis by modified Legendre moments. Pattern Recognit. 2007, 40, 691–704. [Google Scholar] [CrossRef]
- Chao, K.; Mandyam, D.S. Invariant character recognition with Zernike and orthogonal Fourier-Mellin moments. Pattern Recognit. 2002, 35, 143–154. [Google Scholar]
- Derrode, S.; Ghorbel, F. Robust and efficient Fourier-Mellin transform approximations for gray-level image reconstruction and complete invariant description. Comput. Vis. Image Underst. 2001, 83, 57–78. [Google Scholar] [CrossRef]
- Zhang, H.; Shu, H.Z.; Haigron, P.; Luo, L.M.; Li, B.S. Construction of a complete set of orthogonal Fourier-Mellin moment invariants for pattern recognition applications. Image Vis. Comput. 2010, 28, 38–44. [Google Scholar] [CrossRef]
- Teague, M. Image analysis via the general theory of moments. J. Opt. Soc. Am. 1980, 70, 920–930. [Google Scholar] [CrossRef]
- Sheng, Y.L.; Shen, L.X. Orthogonal Fourier-Mellin moments for invariant pattern recognition. J. Opt. Soc. Am. 1994, 11, 1748–1757. [Google Scholar] [CrossRef]
- Flusser, J.; Suk, T. Affine moment invariants: A new tool for character recognition. Pattern Recognit. Lett. 1994, 15, 433–436. [Google Scholar] [CrossRef]
- Chim, Y.C.; Kassim, A.A.; Ibrahim, Y. Character recognition using statistical moments. Image Vis. Comput. 1999, 17, 299–307. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, S.; Wang, D.; Guan, W. Aircraft recognition in infrared image using wavelet moment invariants. Image Vis. Comput. 2009, 27, 313–318. [Google Scholar] [CrossRef]
- Sluzek, A. Identification and inspection of 2-D objects using new moments-based shape descriptors. Pattern Recognit. Lett. 1995, 16, 687–697. [Google Scholar] [CrossRef]
- Chen, C.C. Improved moment invariants for shape discrimination. Pattern Recognit. 1993, 26, 683–686. [Google Scholar] [CrossRef]
- Cheng, S.C. Content-based image retrieval using moments-preserving edge detection. Image Vis. Comput. 2003, 21, 809–826. [Google Scholar] [CrossRef]
- Schlemmer, M.; Heringer, M.; Morr, F.; Hotz, I.; Bertram, M.-H.; Garth, C.; Kollmann, W.; Hamann, B.; Hagen, H. Moment invariants for the analysis of 2D flow fields. IEEE Trans. Vis. Comput. Graph. 2007, 13, 1743–1750. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.; De Silva, L.C.; Ko, C.C. Using moment invariants and HMM in facial expression recognition. Pattern Recognit. Lett. 2002, 23, 83–91. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, S.; Sun, P.; Phillips, P. Pathological brain detection based on wavelet entropy and Hu moment invariants. Bio-Med. Mater. Eng. 2015, 26, 1283–1290. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Pan, H.; Zhang, C.; Tian, Y. RGB-D image based detection of stairs, pedestrian crosswalks and traffic signs. J. Vis. Commun. Image Represent. 2014, 25, 263–272. [Google Scholar] [CrossRef]
- Balslev, I.; Døring, K.; Eriksen, R.D. Weighted Central Moments in Pattern Recognition. Pattern Recognit. Lett. 2000, 21, 381–384. [Google Scholar] [CrossRef]
- Nasreddine, K.; Benzinou, A.; Fablet, R. Variational shape matching for shape classification and retrieval. Pattern Recognit. Lett. 2010, 31, 1650–1657. [Google Scholar] [CrossRef]
- Direkoglu, C.; Nixon, M.S. Shape classification via image-based multiscale description. Pattern Recognit. 2011, 44, 2134–2146. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shu, X.; Zhang, Q.; Shi, J.; Qi, Y. A Comparative Study on Weighted Central Moment and Its Application in 2D Shape Retrieval. Information 2016, 7, 10. https://doi.org/10.3390/info7010010
Shu X, Zhang Q, Shi J, Qi Y. A Comparative Study on Weighted Central Moment and Its Application in 2D Shape Retrieval. Information. 2016; 7(1):10. https://doi.org/10.3390/info7010010
Chicago/Turabian StyleShu, Xin, Qianni Zhang, Jinlong Shi, and Yunsong Qi. 2016. "A Comparative Study on Weighted Central Moment and Its Application in 2D Shape Retrieval" Information 7, no. 1: 10. https://doi.org/10.3390/info7010010
APA StyleShu, X., Zhang, Q., Shi, J., & Qi, Y. (2016). A Comparative Study on Weighted Central Moment and Its Application in 2D Shape Retrieval. Information, 7(1), 10. https://doi.org/10.3390/info7010010