

Towards a Supervised Remote Laboratory Platform for Teaching Microcontroller Programming




Abstract
1. Introduction
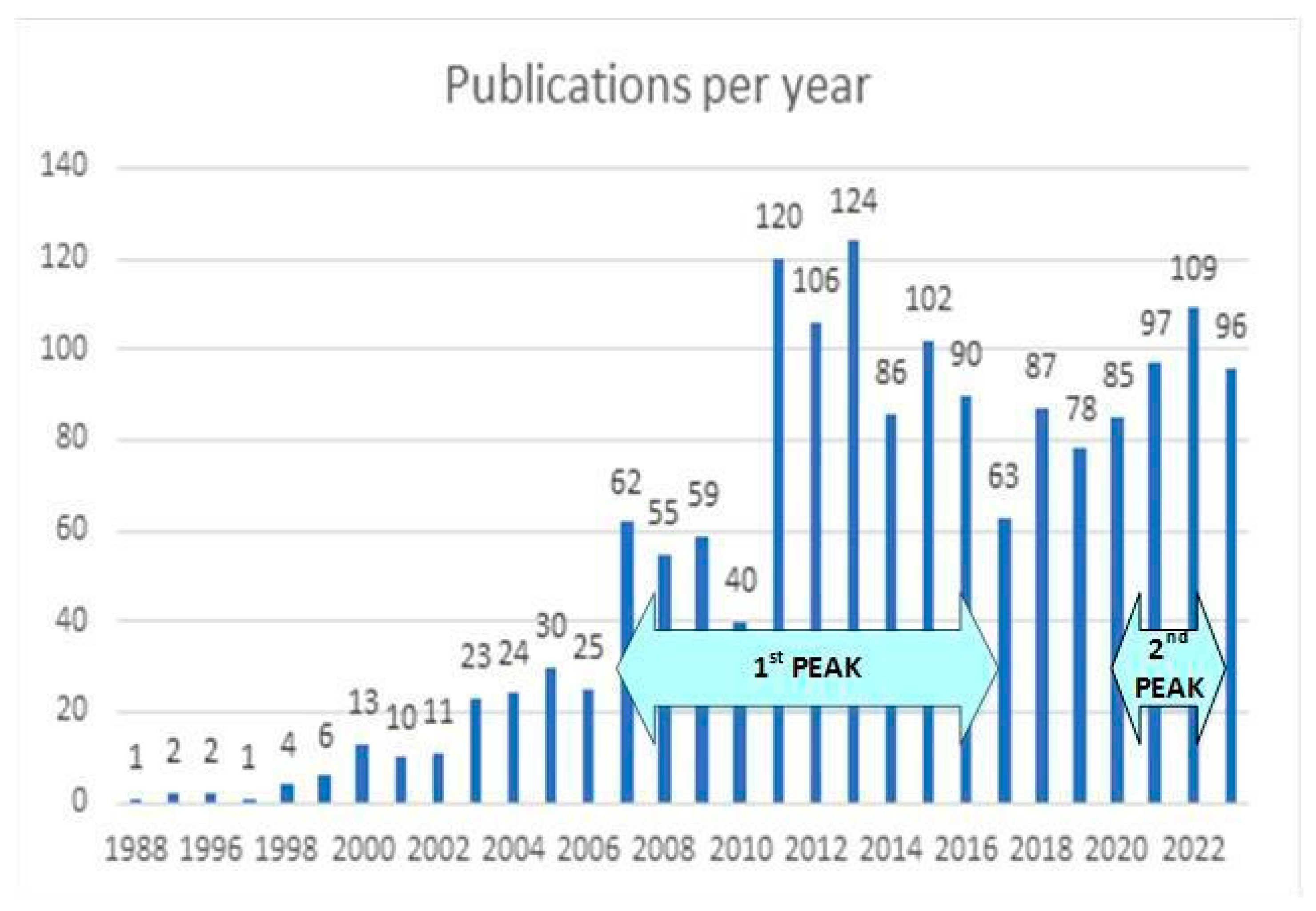
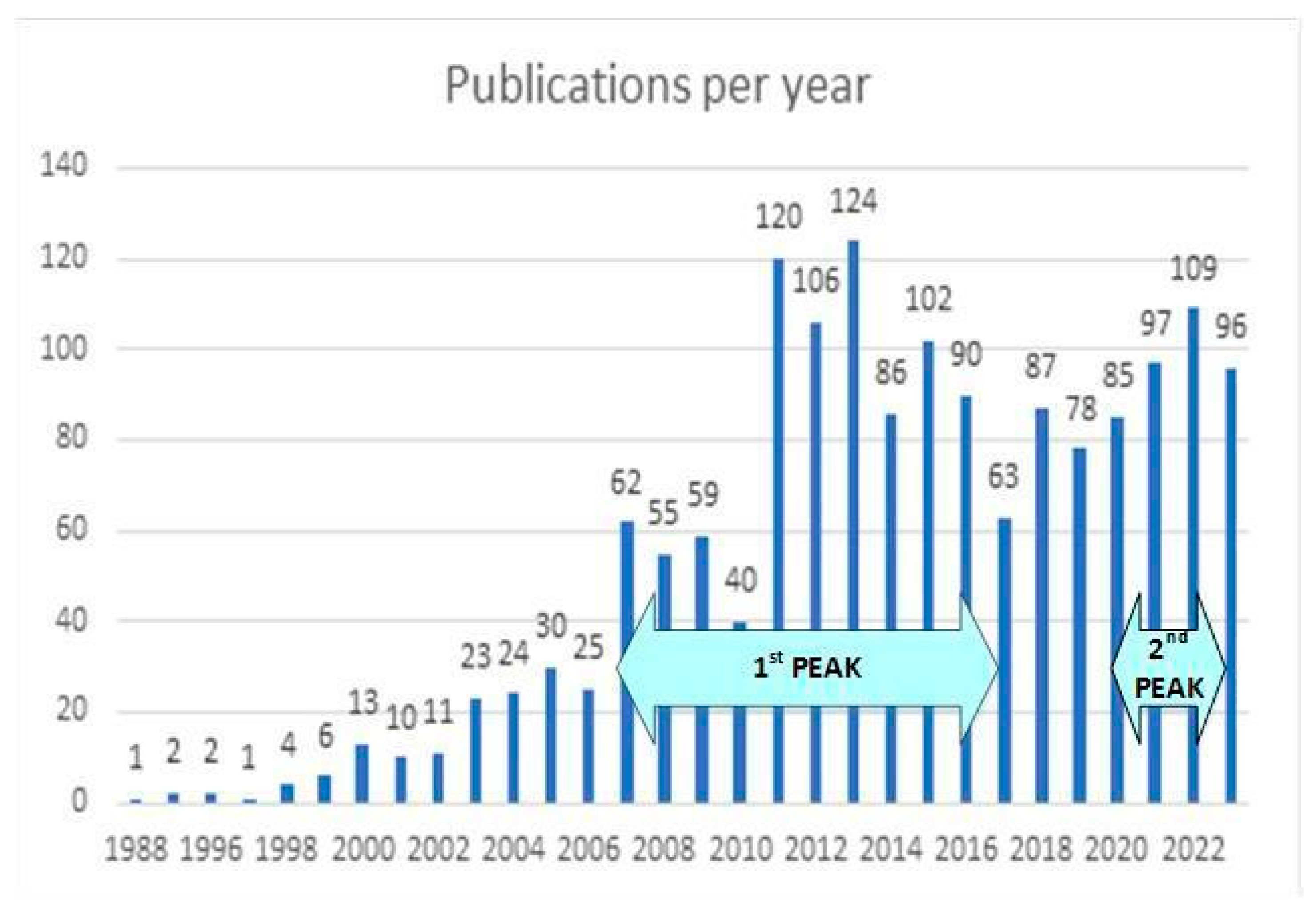
2. State of the Art
- RLs related to teaching microcontroller programming, specifically Arduino, because the proposed RL is about teaching programming of Arduino boards.
- Access to the article using the institutional credentials of Hellenic Mediterranean University.
- Papers written in the English language.
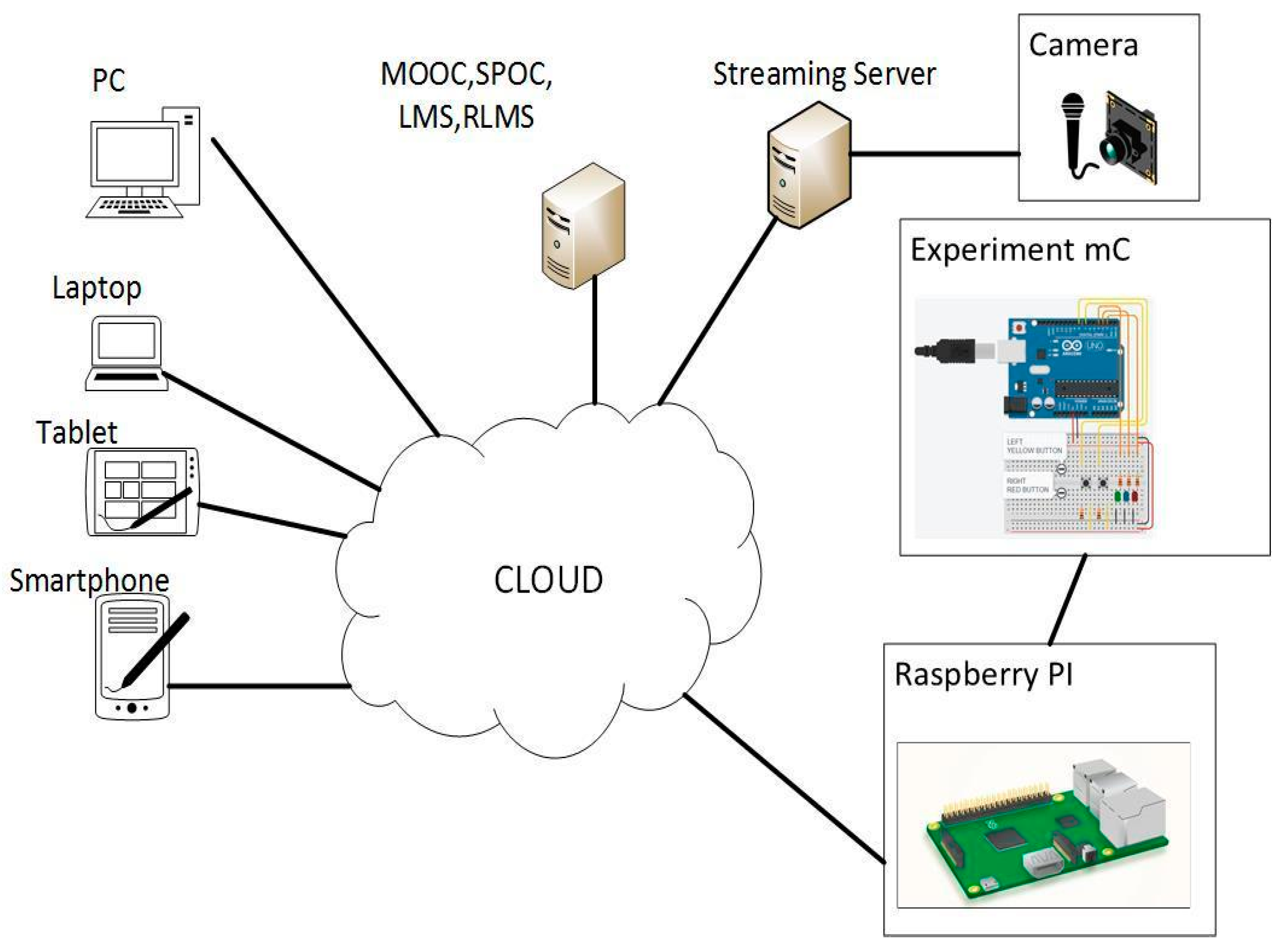
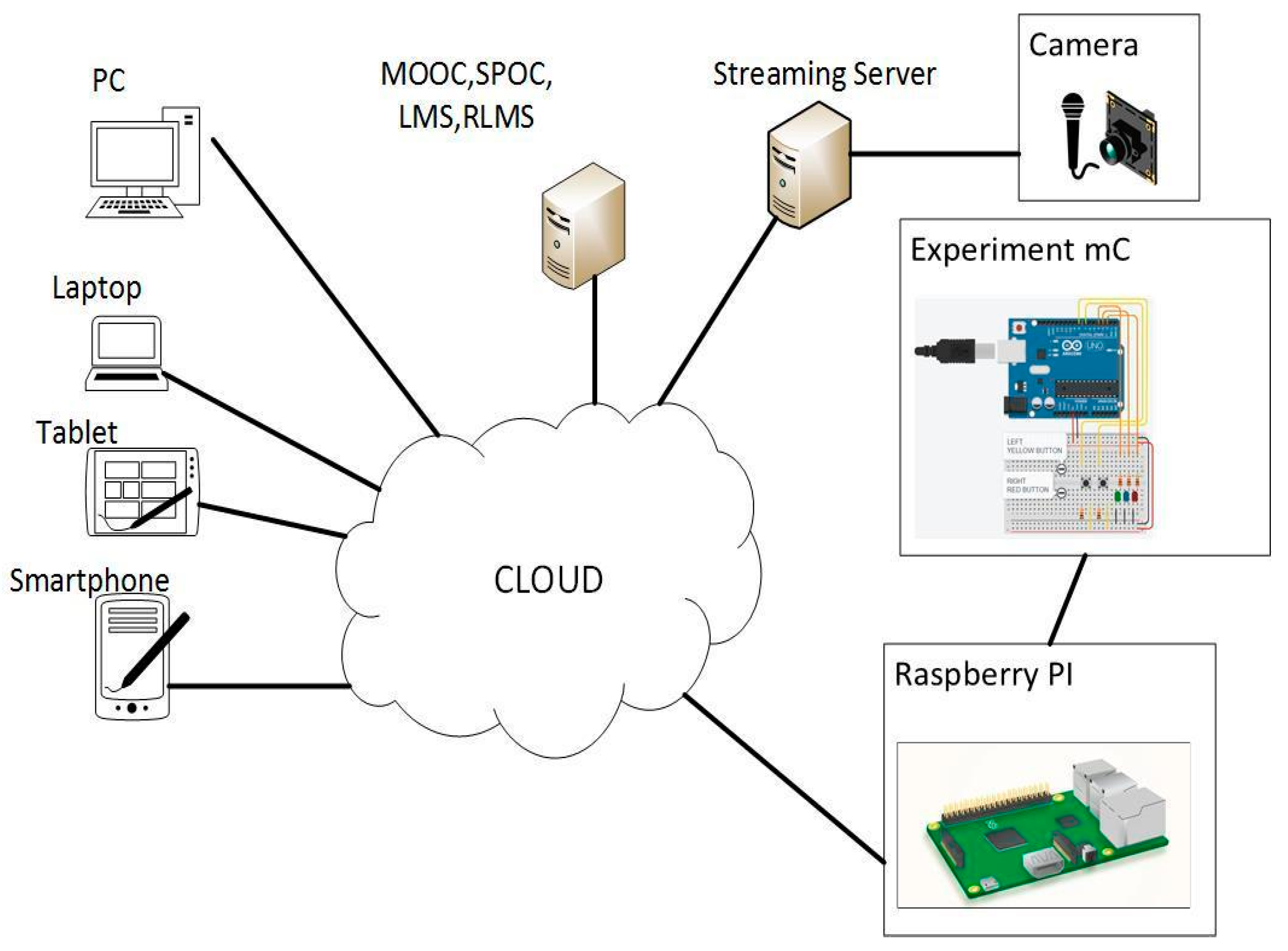
3. The Architecture of the HMU-RLP
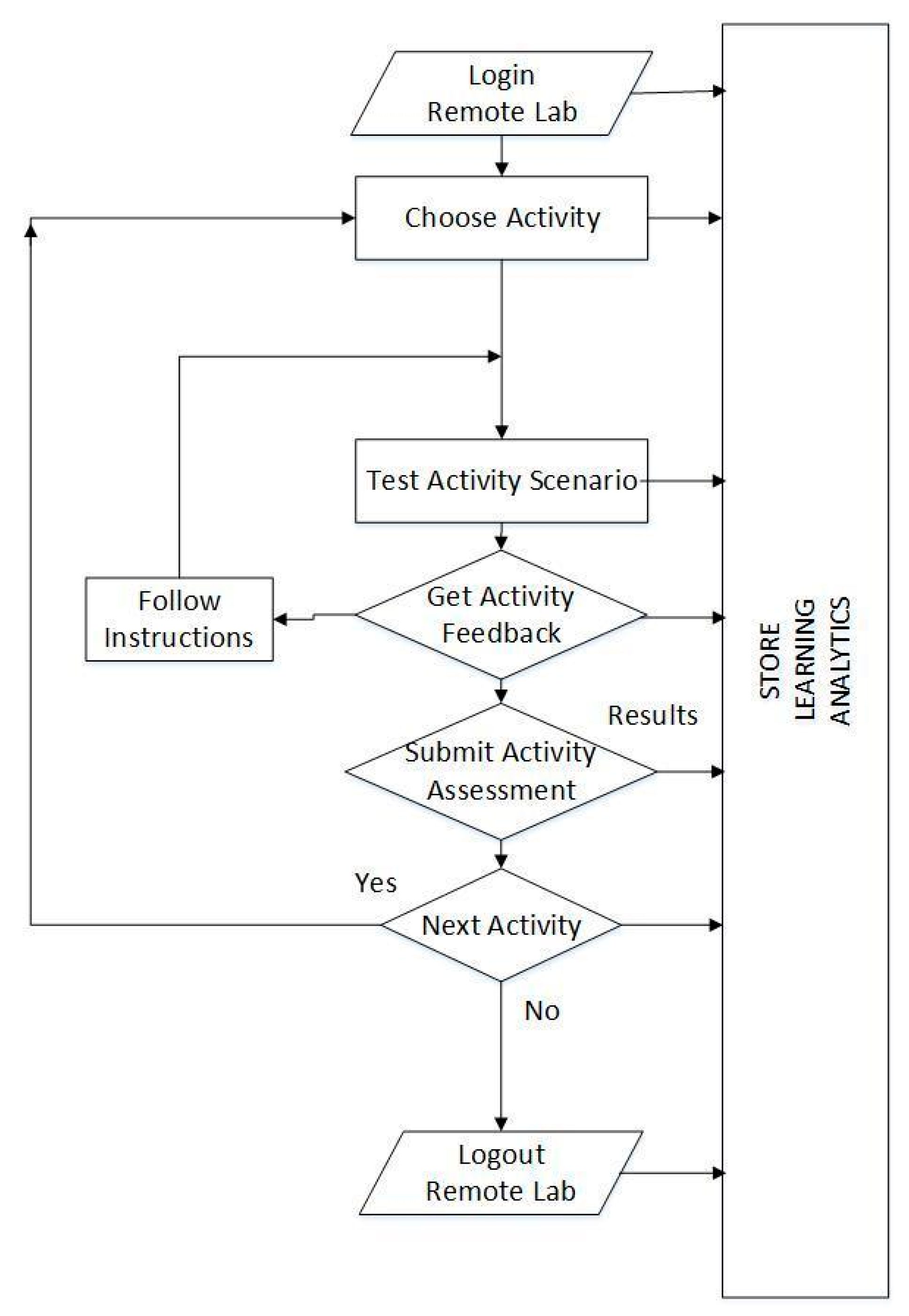
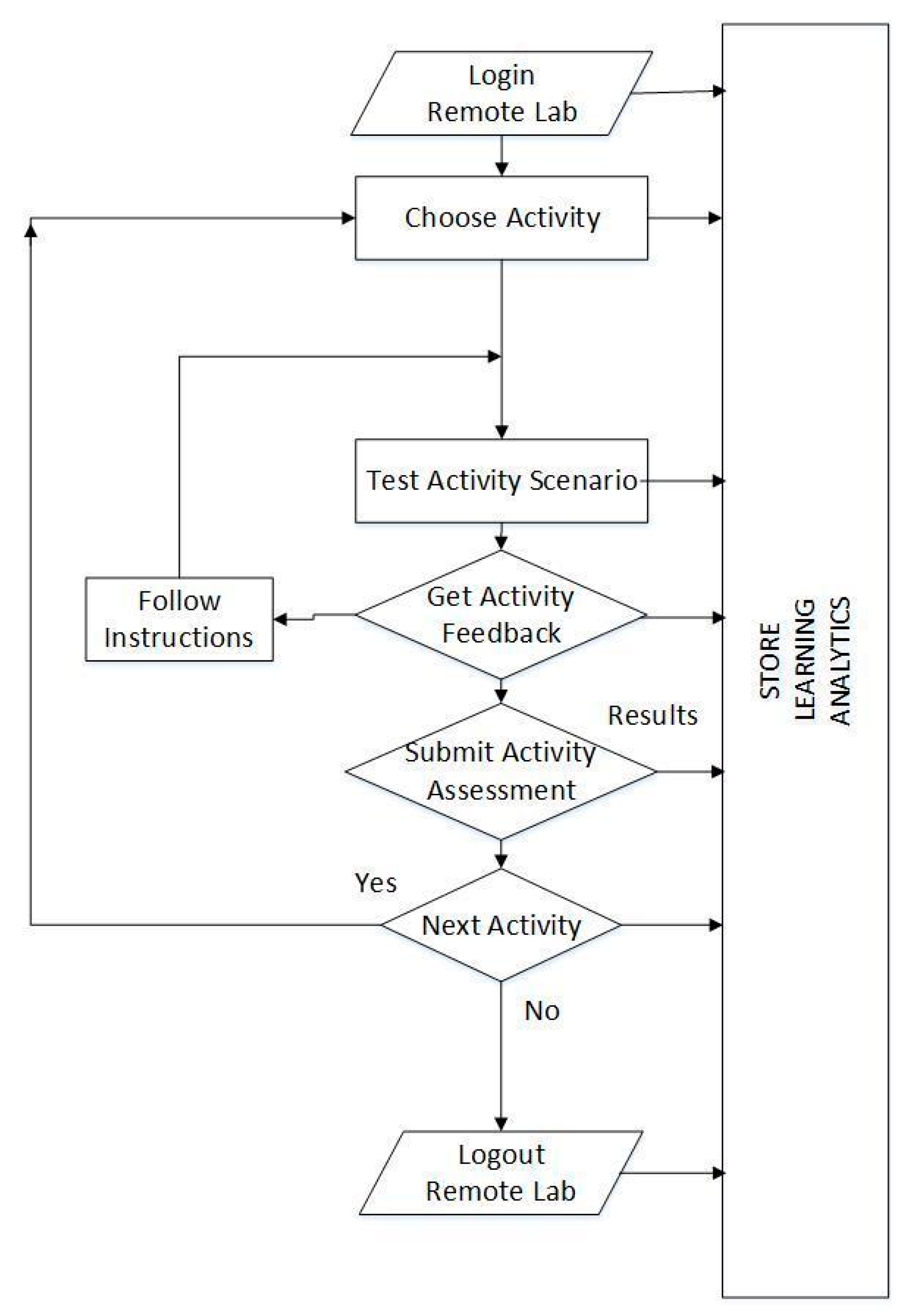
HMU–RLP User Workflow
4. Remote Lab Assessment Types
4.1. Actions Assessment
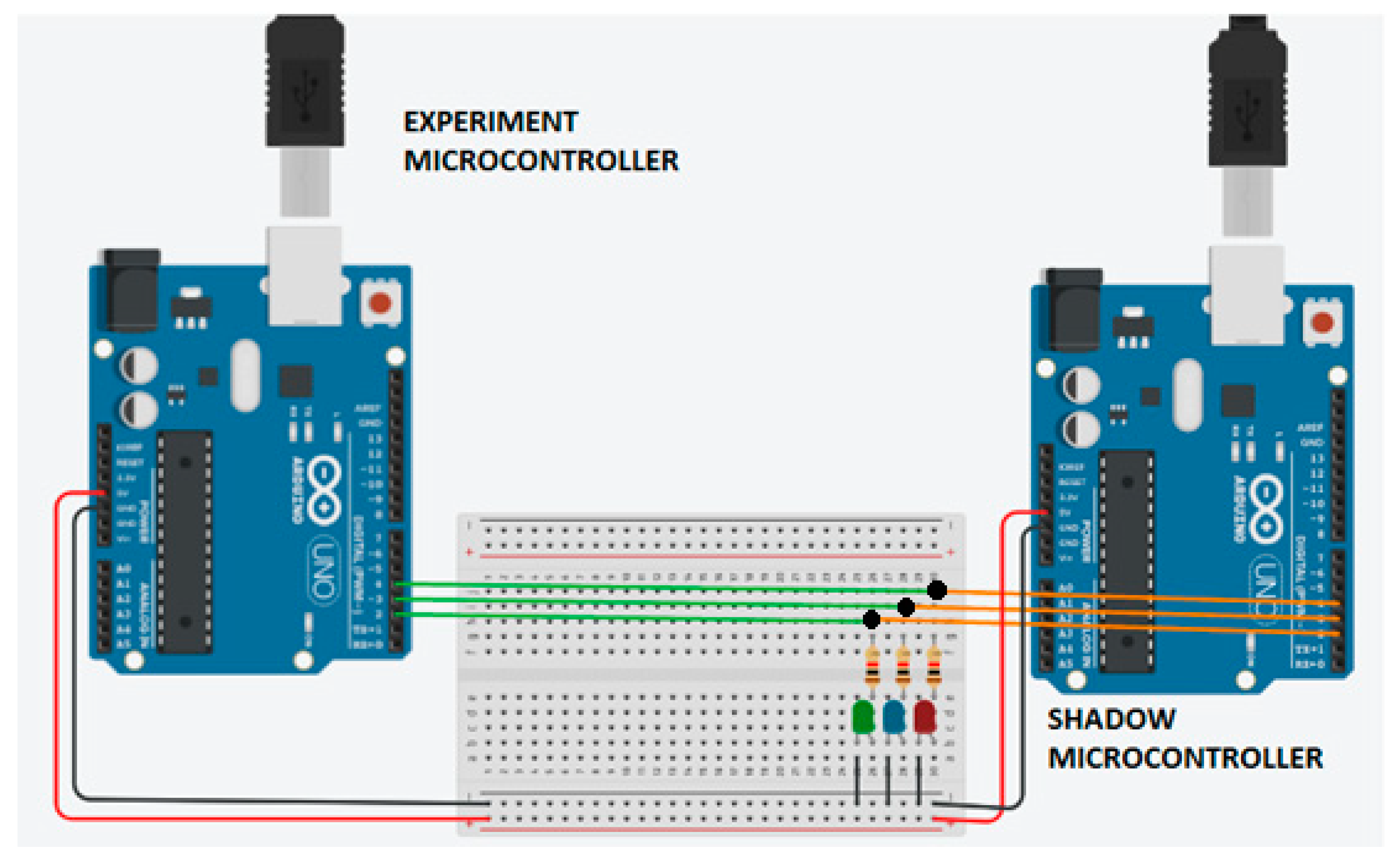
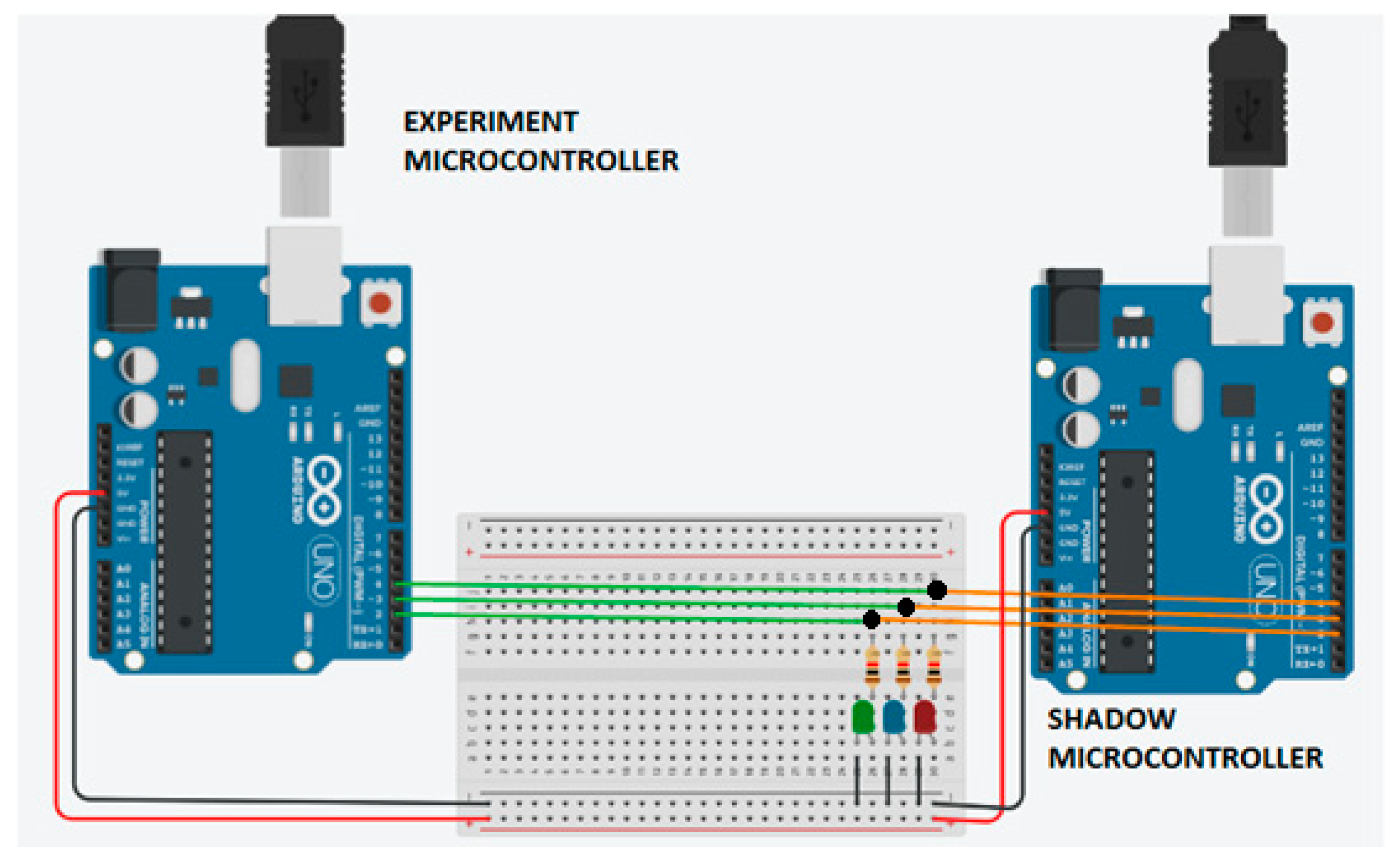
4.2. Shadow Microcontroller Assessment
4.2.1. Activity-Specific Firmware
4.2.2. General Firmware
4.3. Artificial Intelligence Assessment
4.4. Assessment Types Roles
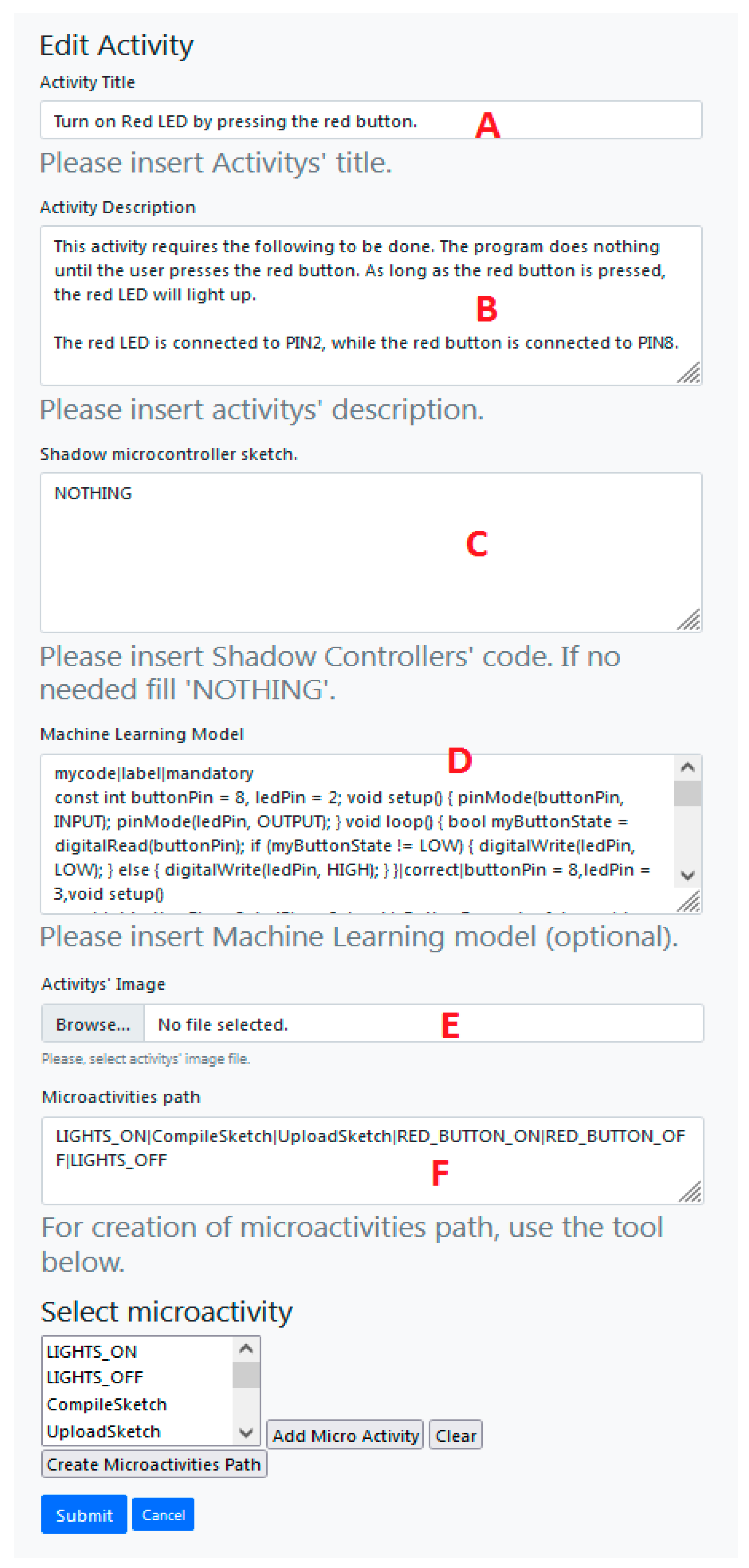
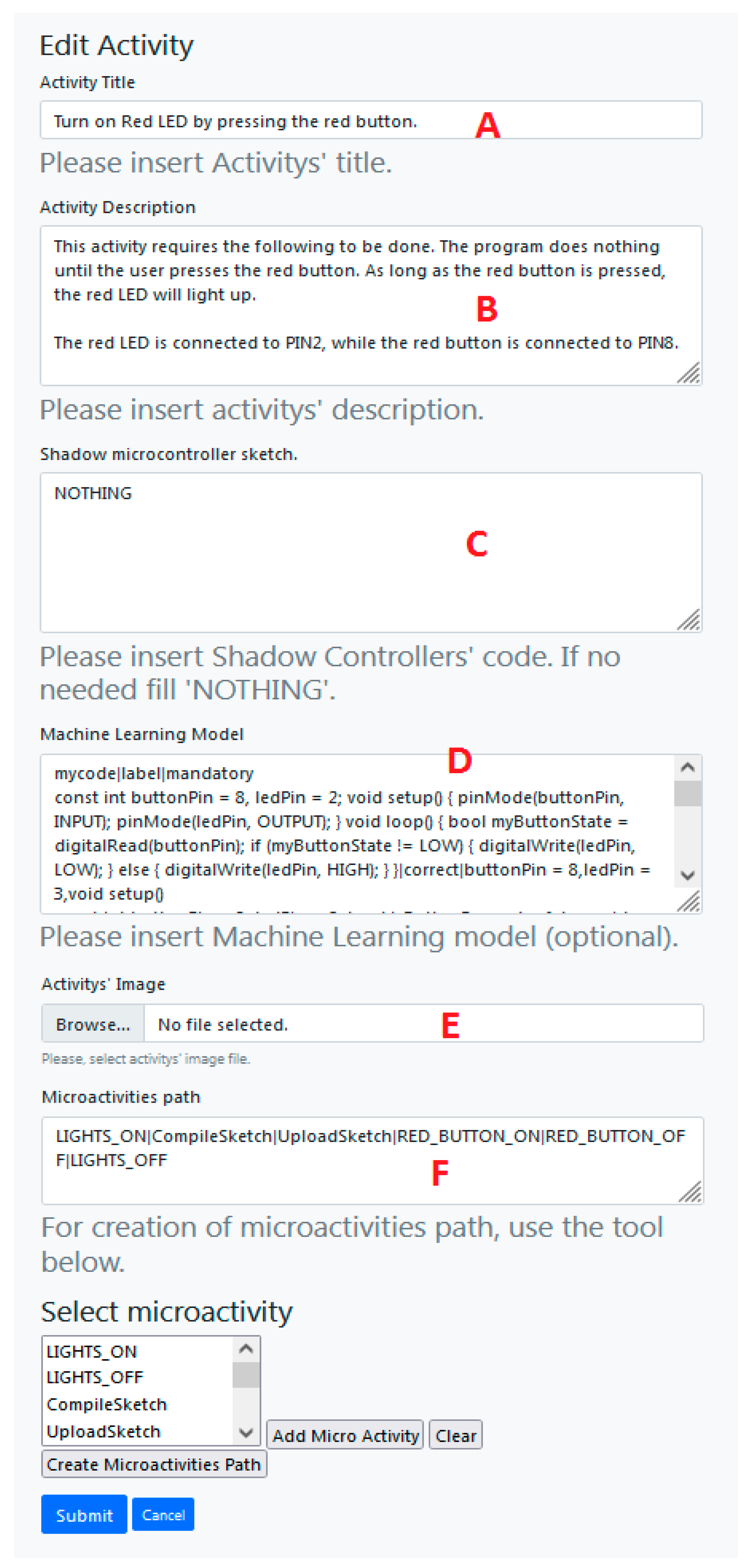
4.5. Activity Creation
- Activity Title
- Activity Description–User Instructions
- Shadow Controller Code
- Machine Learning Models
- Activity Image
- Microactivities–User action path
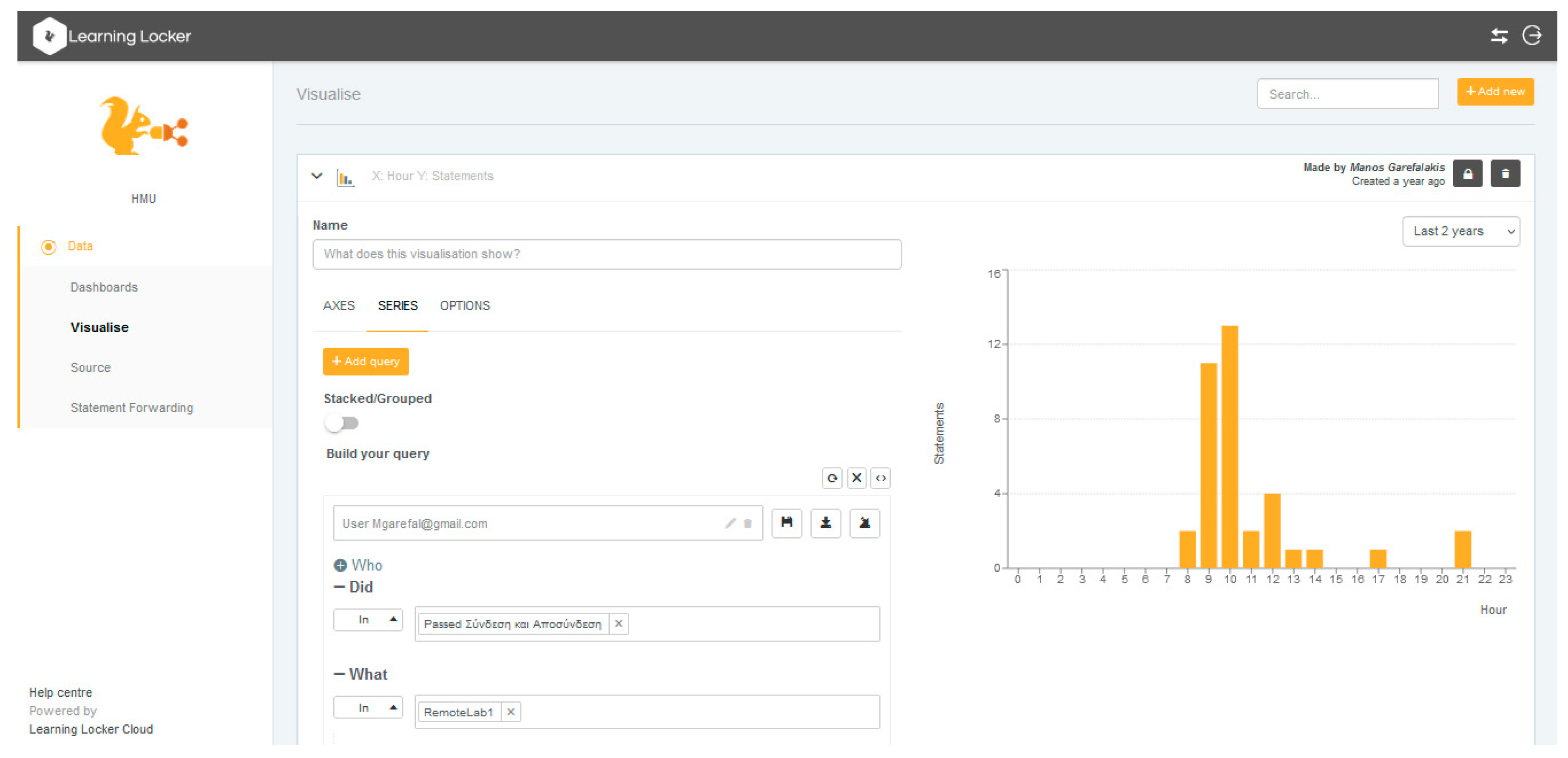
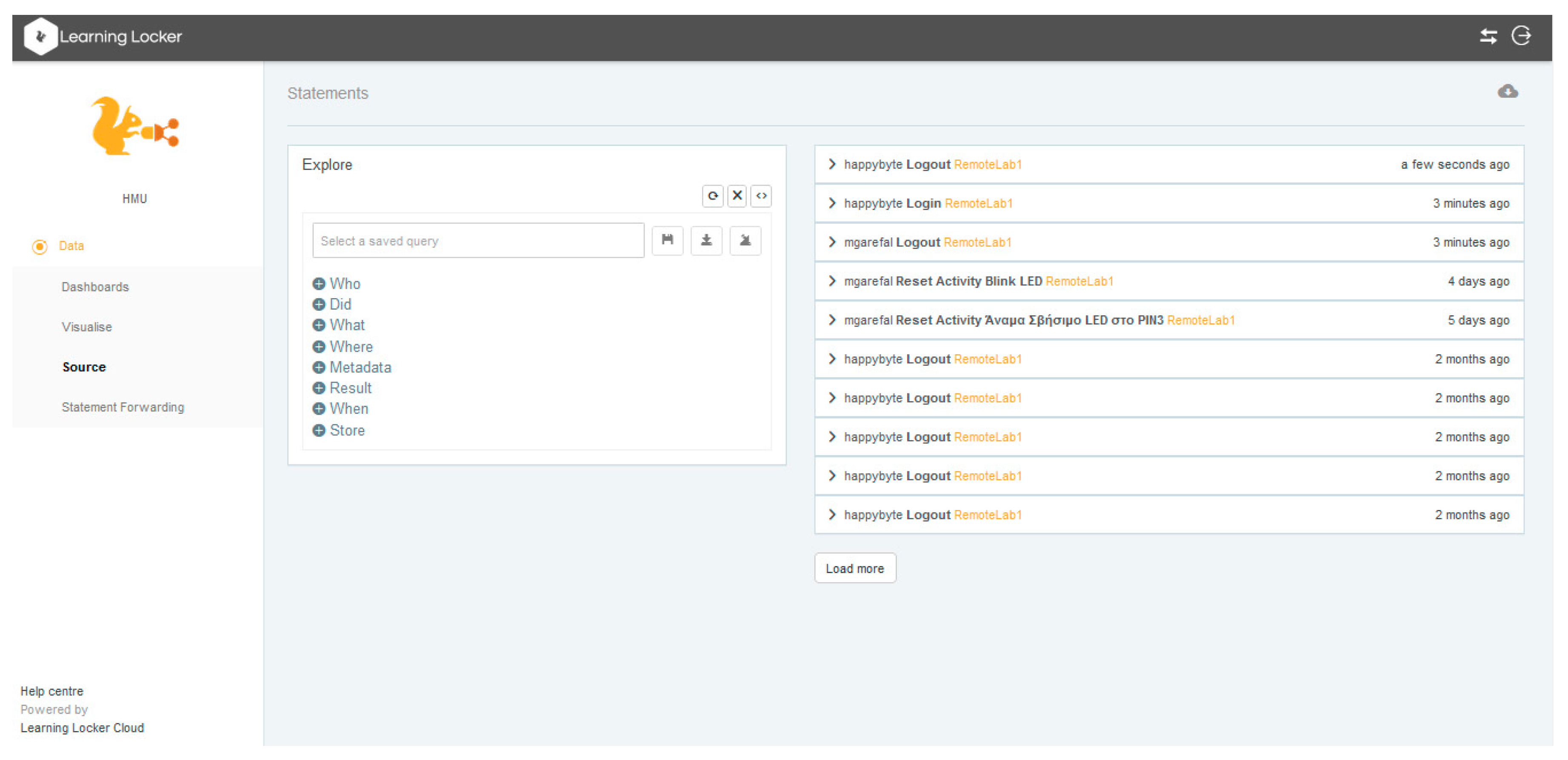
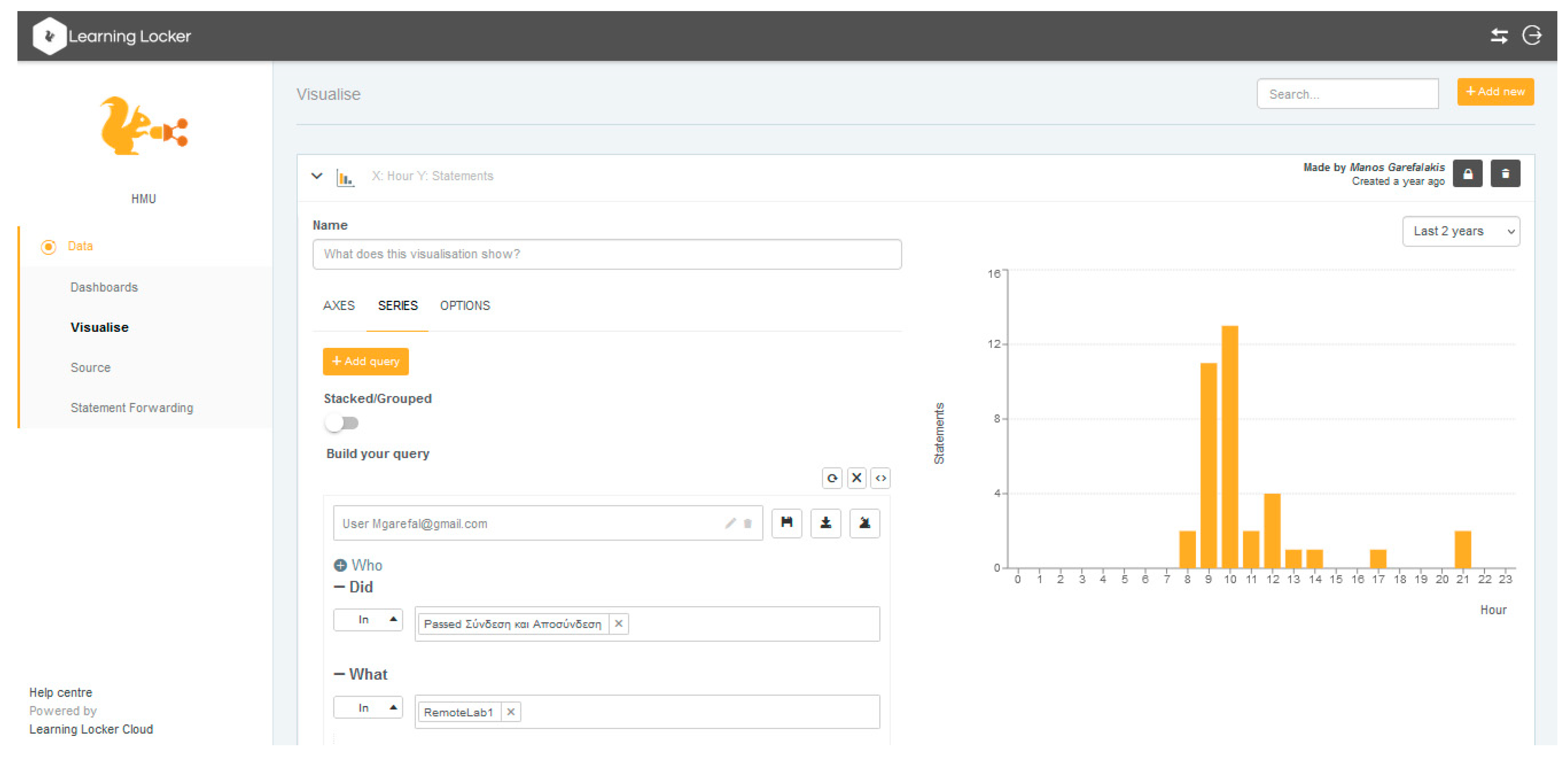
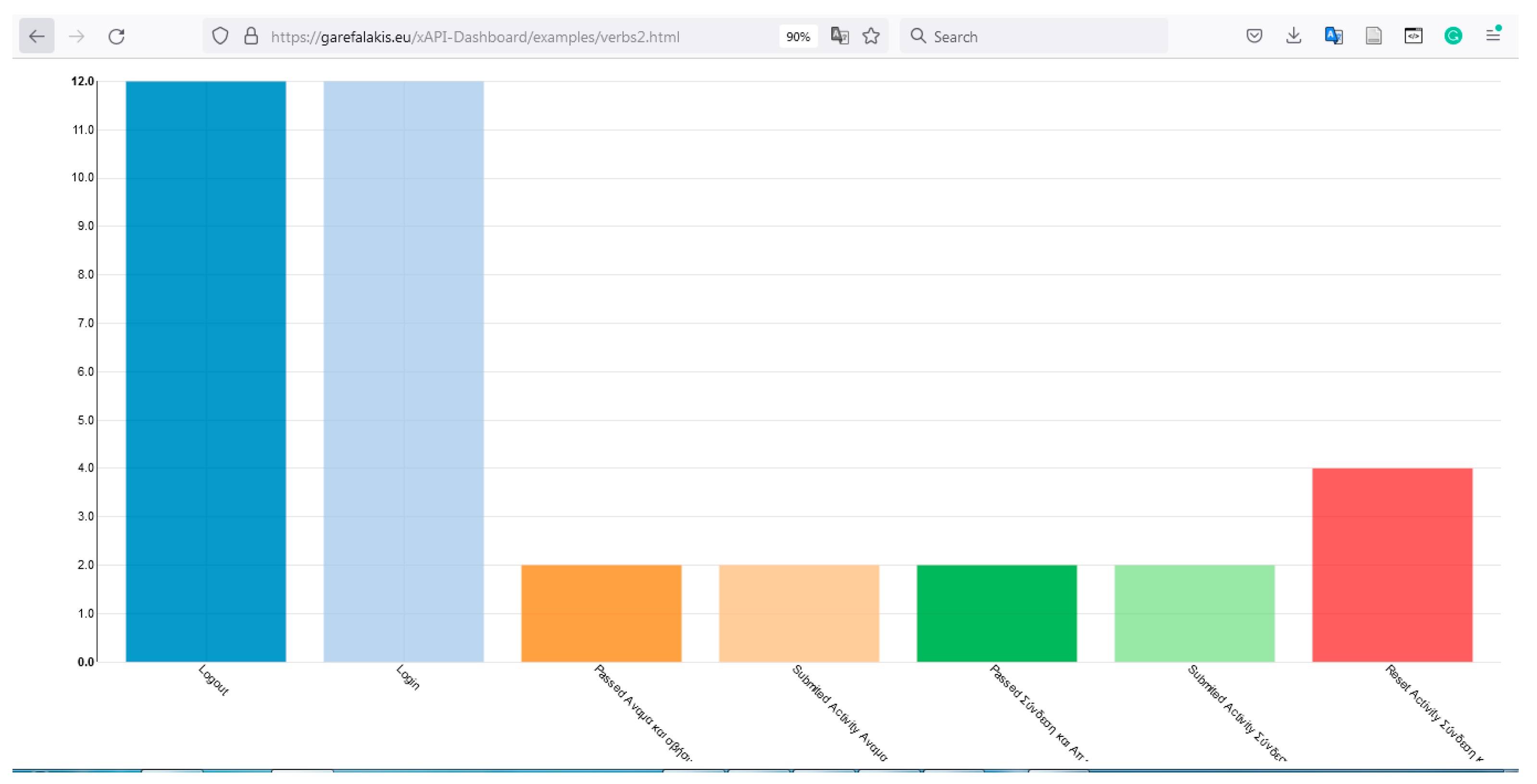
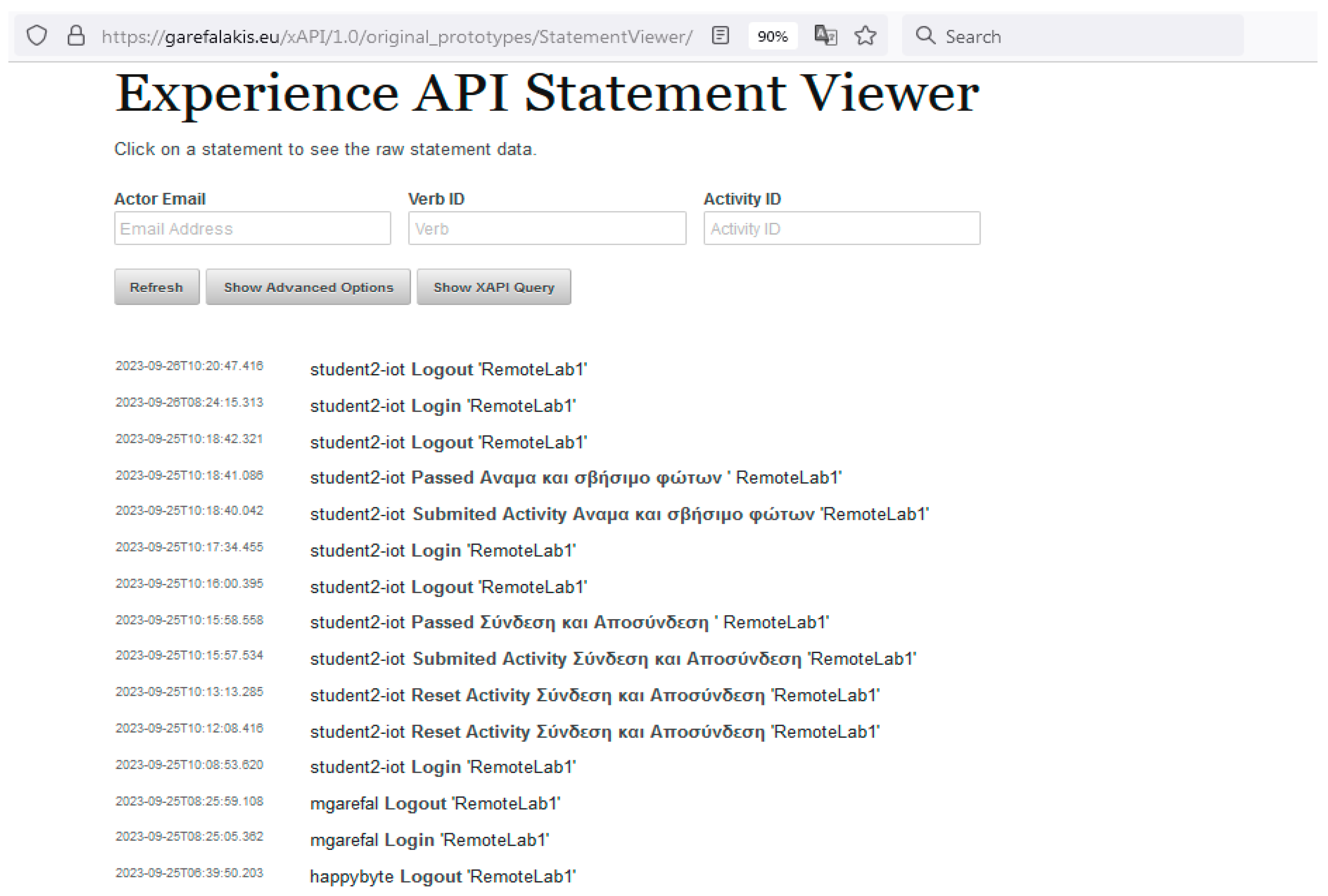
5. Experience API Statements and Tools
- Statements: At the heart of xAPI are “statements” that record what a learner has done. A statement is usually formatted as “I did this” or “[Actor] [Verb] [Object]”. For example, “Manos logged in the Remote Lab 1”, “Manos activated activity No 1 on Remote Lab 1”, or “Manos passed activity No 1 on Remote Lab 1”.
- Actor: The individual or group that the statement is about.
- Verb: Describes the action taken by the actor.
- Object: What the action is performed on.
- Result: Additional data about the outcome (optional).
- Context: Additional data to help understand the context in which the action occurred (optional).
6. Remote Lab Experiments
7. Discussion and Conclusions
- We intend to further develop the features of our platform that exploit xAPI statements with users’ learning analytics data to create personalized learning paths according to the adaptive and pervasive learning paradigm. We intend to follow a hybrid approach so that this process works both manually, under the supervision of the instructors with decision support offered by our system, and automatedly, so users are automatically assessed and tutored by the system.
- Further development of the AI type of assessment offered by our platform for automatically checking user coding. To this end, we plan to fine-tune a pretrained open-source large language model (e.g., Llama2) to assist the user with the coding actions that must be followed for a specific activity or provide feedback on a sketch that is not aligned with the activity scenario.
- The literature revealed that many RLs are hosted in remote laboratory management systems (RLMSs). Although the HMU-RLP can currently accommodate several RLs, it cannot be considered an RLMS. Such an option will help in RL sharing and dissemination via the HMU-RLP.
- Creation of an RL that will be used in teaching microcontroller programming for the Internet of Things. There will be two remote laboratories, one of which will have an experimental microcontroller connected with sensors and actuators, like ESP32, that will communicate with an MQTT server, and one software RL that will host a Node-RED server where the user will develop an application that will interact with the MQTT server and will display in the user interface controls and charts.
- Thorough evaluation and testing of the HMU-RLP into real training and learning environments so we can scale its readiness level from an experimental proof-of-concept platform to a production-ready toolkit. The HMU-RLP has already been presented to teachers of Greek secondary education and we will soon have their opinions and evaluation. Next, it is planned for the teachers to use the HMU-RLP in their classes for teaching Arduino and IoT programming, and students will be able to further evaluate the HMU-RLP.
- The implementation of the H/W configuration of the RL by the user remotely, as is described in the paper [20]. The user will be able to use more components connected to the Arduino board by switching and enabling different connections to new circuits remotely, using relay matrixes.
- Implementation of augmented and virtual reality applications for the user to see the experiments working and interact with them using AR and VR technology.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- 1876–2019—IEEE Standard for Networked Smart Learning Objects for Online Laboratories|IEEE Standard|IEEE Xplore. Available online: https://ieeexplore.ieee.org/document/8723446 (accessed on 30 August 2023).
- Zutin, D.G.; Auer, M.E.; Maier, C.; Niederstätter, M. Lab2go—A repository to locate educational online laboratories. In Proceedings of the IEEE EDUCON 2010 Conference, Madrid, Spain, 14–16 April 2010; pp. 1741–1746. [Google Scholar] [CrossRef]
- Tinkercad—From Mind to Design in Minutes. Tinkercad. Available online: https://www.tinkercad.com/ (accessed on 13 March 2024).
- Panagiotakis, S.; Karampidis, K.; Garefalakis, M.; Tsironi-Lamari, A.; Rallis, I.; Kamarianakis, Z.; Papadourakis, G. Remote Arduino Labs for Teaching Microcontrollers and Internet of Things Programming. In Proceedings of the 2022 31st Annual Conference of the European Association for Education in Electrical and Information Engineering (EAEEIE), Coimbra, Portugal, 29 June–1 July 2022. [Google Scholar]
- Garefalakis, M.; Panagiotakis, S. Integration of a Remote Lab with a Learning System for training on Microcontrollers’ programming. In Proceedings of the 27th PanHellenic Conference on Progress in Computing and Informatics—PCI 2023, Lamia, Greece, 24–26 November 2023. [Google Scholar]
- Villar-Martinez, A.; Ortiz-de-Zarate, L.; Rodriguez-Gil, L.; Hernandez-Jayo, U.; Garcia-Zubia, J.; Angulo, I.; Terkowsky, C.; Ortelt, T.R.; Wilkesmann, U.; Nowak, R.; et al. LabsLand Electronics Laboratory: Distributed, Scalable and Reliable Remote Laboratory for Teaching Electronics. In Open Science in Engineering; Auer, M.E., Langmann, R., Tsiatsos, T., Eds.; Lecture Notes in Networks and Systems; Springer Nature: Cham, Switzerland, 2023; Volume 763, pp. 261–272. [Google Scholar] [CrossRef]
- de Zarate, L.O.; Angulo, I.; Villar-Martínez, A.; Rodriguez-Gil, L.; García-Zubía, J. Remote Laboratory for the Development of Customized Low-Power Computing and IoT Systems. Lect. Notes Netw. Syst. 2023, 763, 249–260. [Google Scholar] [CrossRef]
- Villar-Martinez, A.; Rodriguez-Gil, L.; Ortiz-de-Zarate, L.; Hussein, R.; Orduña, P. ARM Distributed and Scalable Remote Laboratory for Texas Instruments Launchpad Boards. Lect. Notes Netw. Syst. 2023, 763, 177–186. [Google Scholar] [CrossRef]
- Buitrago, P.A.; Camacho, R.; Pérez, H.E.; Jaramillo, O.; Villar-Martinez, A.; Rodríguez-Gil, L.; Orduna, P. Mobile Arduino Robot Programming Using a Remote Laboratory in UNAD: Pedagogic and Technical Aspects: Experience Using a Remote Mobile Robotics Laboratory at UNAD. Adv. Intell. Syst. Comput. 2021, 1231, 171–183. [Google Scholar] [CrossRef]
- Del Villar, I.; Rodriguez-Gil, L.; Orduña, P. Learning CAN Bus Communication with a Remote Laboratory. 2022. Available online: https://ieeexplore.ieee.org/abstract/document/9766633/ (accessed on 28 March 2024).
- Sapeha, A.; Zlatkova, A.; Poposka, M.; Donchevski, F.; Karpov, K.B.; Todorov, Z.; Efnusheva, D.; Kokolanski, Z.; Sarjas, A.; Gleich, D.; et al. Learning Management Systems as a Platform for Deployment of Remote and Virtual Laboratory Environments. 2022. Available online: https://repo.bibliothek.uni-halle.de/handle/1981185920/78898 (accessed on 28 March 2024).
- da Silva, R.C.; de Magalhães Netto, J.F.; Lopes, A.M.M.; de Menezes, M.F.; Menezes, R.A. ERPLab: Remote Laboratory for Teaching Robotics and Programming. 2023. Available online: https://ieeexplore.ieee.org/abstract/document/10343379/ (accessed on 28 March 2024).
- Oballe-Peinado, Ó.; Castellanos-Ramos, J.; Sánchez-Durán, J.A.; Navas-González, R.; Daza-Márquez, A.; Botín-Córdoba, J.A. Fpga-Based Remote Laboratory for Digital Electronics. 2020. Available online: https://ieeexplore.ieee.org/abstract/document/9163676/ (accessed on 28 March 2024).
- Navas-González, R.; Oballe-Peinado, Ó.; Castellanos-Ramos, J.; Rosas-Cervantes, D.; Sánchez-Durán, J.A. Practice Projects for an FPGA-Based Remote Laboratory to Teach and Learn Digital Electronics. Information 2023, 14, 558. [Google Scholar] [CrossRef]
- Bukovac, A.; Pleše, E.; Maravić, U.; Petrović, P.; Jagušt, T. Teaching Programming and Microcontrollers with an Arduino Remote Laboratory Application. 2023. Available online: https://ieeexplore.ieee.org/abstract/document/10159730/ (accessed on 28 March 2024).
- Martin, S.; Fernandez-Pacheco, A.; Ruipérez-Valiente, J.A.; Carro, G.; Castro, M. Remote experimentation through Arduino-based Remote Laboratories. IEEE Rev. Iberoam. De Tecnol. Del Aprendiz. 2021, 16, 180–186. [Google Scholar] [CrossRef]
- Terauds, M.; Smolaninovs, V. Remote Laboratory for Microcontroller Programming Course. 2022. Available online: https://ieeexplore.ieee.org/abstract/document/9978868/ (accessed on 28 March 2024).
- Seničić, Đ.; Matijević, M.; Tanasković, M.; De La Torre, L. An Implementation of a Web Laboratory Converting Off-Line Experiments into Remotely Accessible Experiments. In Proceedings of the Sinteza 2022—International Scientific Conference on Information Technology and Data Related Research, Belgrade, Serbia, 16 April 2022. [Google Scholar] [CrossRef]
- Domski, W. Remote Laboratory Offered as Hardware-as-a-Service Infrastructure. Electronics 2022, 11, 1568. [Google Scholar] [CrossRef]
- Scaffidi, C.; Distefano, S. A Remotely Configurable Hardware/Software Architecture for a Distance IoT Lab. 2021. Available online: https://ieeexplore.ieee.org/abstract/document/9556236/ (accessed on 28 March 2024).
- Tokarz, K.; Czekalski, P.; Drabik, G.; Paduch, J.; Distefano, S.; Di Pietro, R.; Merlino, G.; Scaffidi, C.; Sell, R.; Kuaban, G.S. Internet of Things Network Infrastructure for the Educational Purpose. 2020. Available online: https://ieeexplore.ieee.org/abstract/document/9274040/ (accessed on 28 March 2024).
- Admin. IOT-OPEN.EU: Introduction to the IoT Practical Projects in English—IOT-Open. Available online: https://iot-open.eu/download/iot-open-eu-introduction-to-the-iot-practical-projects-in-english/ (accessed on 23 January 2024).
- Costa, R.; Pérola, F.; Felgueiras, C. μLAB A Remote Laboratory to Teach and Learn the ATmega328p μC. 2020. Available online: https://ieeexplore.ieee.org/abstract/document/9125336/ (accessed on 28 March 2024).
- Da Silva, J.B.; De Oliveira, G.; Da Silva, I.N.; Mafra, P.M.; Meister, S.; Bilessimo, S. Block. Ino: Remote lab for programming teaching and learning. Int. J. Adv. Eng. Res. Sci. 2020, 7, 41–47. [Google Scholar] [CrossRef]
- Platunov, A.; Kluchev, A.; Pinkevich, V.; Kluchev, V.; Kolchurin, M. Training Laboratories with Online Access on the ITMO. cLAB Platform. 2020. Available online: http://ceur-ws.org/Vol-2893/paper_12.pdf (accessed on 28 March 2024).
- Jo, H.S.; Jo, R.S. Design and development of remote laboratory system to facilitate online learning in hardware programming subjects. In Proceedings of the 2020 13th International UNIMAS Engineering Conference (EnCon) 2020, Kota Samarahan, Malaysia, 27–28 October 2020. [Google Scholar] [CrossRef]
- Fernández-Pacheco, A.; Martin, S.; Castro, M. Implementation of an Arduino remote laboratory with raspberry Pi. In Proceedings of the 2019 IEEE Global Engineering Education Conference (EDUCON), Dubai, United Arab Emirates, 8–11 April 2019; pp. 1415–1418. Available online: https://ieeexplore.ieee.org/abstract/document/8725030/ (accessed on 23 January 2024).
- Villar-Martinez, A.; Rodriguez-Gil, L.; Angulo, I.; Orduña, P.; García-Zubía, J.; López-De-Ipiña, D. Improving the scalability and replicability of embedded systems remote laboratories through a cost-effective architecture. IEEE Access 2019, 7, 164164–164185. [Google Scholar] [CrossRef]
- HMU-RLP Helenic Mediterranean University Remote Laboratory Platform. Available online: http://rlp.hmu.gr:5000/ (accessed on 11 March 2024).
- LabsLand—Home. Available online: https://labsland.com/en (accessed on 28 February 2024).
- The REMOCLEC Project. Available online: https://remoclec.eu/ (accessed on 13 March 2024).
- The Remote Hub Lab. Remote Hub Lab. Available online: https://rhlab.ece.uw.edu/ (accessed on 14 March 2024).
- Home|Golabz. Available online: https://www.golabz.eu/ (accessed on 28 February 2024).
- Inicio|Laboratorio Remoto de Electrónica Digital. Available online: https://fpga-lab.uma.es/ (accessed on 15 March 2024).
- Home. IOT-Open. Available online: https://iot-open.eu/ (accessed on 16 March 2024).
- de Lima, J.P.C.; Carlos, L.M.; Simão, J.P.S.; Pereira, J.; Mafra, P.M.; da Silva, J.B. Design and implementation of a remote lab for teaching programming and robotics. IFAC-PapersOnLine 2016, 49, 86–91. [Google Scholar] [CrossRef]
- Labs|RELLE—Remote Labs Learning Environment. Available online: http://relle.ufsc.br/ (accessed on 28 February 2024).
- Abd El-Haleem, A.M.; Eid, M.M.; Elmesalawy, M.M.; Hosny, H.A.H. A Generic AI-Based Technique for Assessing Student Performance in Conducting Online Virtual and Remote Controlled Laboratories. Available online: https://ieeexplore.ieee.org/abstract/document/9973300/ (accessed on 28 March 2024).
- “Home”, Learning Locker. Available online: https://www.learninglocker.co.uk/ (accessed on 28 March 2024).
- Arvaniti, D. Tracking learning with Experience API. March 2023. Available online: https://apothesis.lib.hmu.gr/handle/20.500.12688/10503 (accessed on 7 February 2024).
- Papadokostaki, K. Ubiquitous learning with Experience API. December 2017. Available online: https://apothesis.lib.hmu.gr/handle/20.500.12688/8505 (accessed on 7 February 2024).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Source | Initial Search | 1st Stage (Identification) | 2nd Stage (Screening) |
|---|---|---|---|
| Google Scholar | 2267 | 620 | |
| Scopus | 2152 | 842 | |
| Semantic Scholar | 5186 | 492 | |
| OpenAlex | 3939 | 16 | |
| Total | 13,544 | 1970 | 1615 |
| Reference No | Title | Publication Year |
|---|---|---|
| [5] | Integration of a Remote Lab with a Learning System for training on Microcontrollers’ programming | 2023 |
| [6] | LabsLand Electronics Laboratory: Distributed, Scalable and Reliable Remote Laboratory for Teaching Electronics | 2023 |
| [7] | Remote Laboratory for the Development of Customized Low-Power Computing and IoT Systems | 2023 |
| [8] | ARM Distributed and Scalable Remote Laboratory for Texas Instruments Launchpad Boards | 2023 |
| [9] | Mobile Arduino Robot Programming Using a Remote Laboratory in UNAD: Pedagogic and Technical Aspects: Experience Using a Remote Mobile Robotics | 2021 |
| [10] | Learning CAN bus communication with a remote laboratory | 2022 |
| [11] | Learning Management Systems as a platform for deployment of remote and virtual laboratory environments | 2022 |
| [12] | ERPLab: Remote Laboratory for Teaching Robotics and Programming | 2023 |
| [13] | Fpga-based remote laboratory for digital electronics | 2020 |
| [14] | Practice Projects for an FPGA-Based Remote Laboratory to Teach and Learn Digital Electronics | 2023 |
| [15] | Teaching programming and microcontrollers with an arduino remote laboratory application | 2023 |
| [16] | Remote Experimentation Through Arduino-Based Remote Laboratories | 2021 |
| [17] | Remote laboratory for microcontroller programming course | 2022 |
| [18] | An Implementation of a Web Laboratory Converting Off-Line Experiments into Remotely Accessible Experiments | 2022 |
| [4] | Remote Arduino Labs for Teaching Microcontrollers and Internet of Things Programming | 2022 |
| [19] | Remote Laboratory Offered as Hardware-as-a-Service Infrastructure | 2022 |
| [20] | A Remotely Configurable Hardware/Software Architecture for a Distance IoT Lab | 2021 |
| [21] | Internet of things network infrastructure for the educational purpose | 2020 |
| [22] | IOT-OPEN.EU: Introduction to the IoT Practical Projects in English–IOT-Open | 2024 |
| [23] | μLAB A remote laboratory to teach and learn the ATmega328p μC | 2020 |
| [24] | Block. Ino: Remote lab for programming teaching and learning | 2020 |
| [25] | Training Laboratories with Online Access on the ITMO. cLAB Platform | 2020 |
| [26] | Design and development of remote laboratory system to facilitate online learning in hardware programming subjects | 2020 |
| [27] | Implementation of an Arduino remote laboratory with Raspberry Pi | 2019 |
| [28] | Improving the scalability and replicability of embedded systems remote laboratories through a cost-effective architecture | 2019 |
| RL Paper | RL Name | Project Website | Programming Board | Programming Language | RL Controller | Hosted in Platform | Direct Access | Assessment | GUI for Access | Statistics | Monitoring | Remote H/W Reconfiguration | LMS Integration | Logging Learning Analytics |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| [5] | HMU-RLP | [29] | Arduino UNO | C/C++ | Raspberry Pi 3 B+ | No | Yes | Yes | Web Interface | Yes | RPI Camera Module | No | Yes | Yes |
| [6] | LabsLand [30] | Yes | Yes | Yes | ||||||||||
| [7] | RemoCLEC | [31] | NUCLEO-WB55RG | LabsLand [30] | Yes | Yes | ||||||||
| [8] | Pololu Zumo 32u4 robot with Arduino | C/C++ or Visual programming Blockly | LabsLand [30] | Yes | Yes | |||||||||
| TIVA Remote Laboratory at the University of Washington | [32] | TIVA | LabsLand [30] | No | Yes | Yes | Yes | |||||||
| [9] | Robotics Remote Lab of UNAD | ATmega 32U4 compatible with Arduino | C/C++ | Raspberry Pi 3 B+ | LabsLand [30] | Yes | Yes | Yes | ||||||
| [10] | Public University of Navarra CAN Bus RL | Arduino Board | Go Lab [33] LabsLand [30] | Number of Accesses and time spent | Yes | |||||||||
| [11] | UbiLAB project | Weblab-Deusto [33] | Yes | |||||||||||
| [12] | ERPLab Environment-Robotic-Programmin-Laboratory | Arduino Uno development board and Ethernet Shield W5100 | C/C++ | No | ESP32CAM | No | ||||||||
| [13] | FPGA Nexys 3 | No camera | ||||||||||||
| [14] | RLAB University of Málaga | [34] | FPGA Nexys 3 | Raspberry Pi 4 | Yes | No camera | ||||||||
| [15] | RemoLab in Croatian schools | Arduino | WebCam | |||||||||||
| [16] | University UNED | Arduino | Raspberry Pi | WebCam | ||||||||||
| [17] | Riga Technical University | Texas Instruments (TI) MSP430 | Remote Desktop | VLC | ||||||||||
| [18] | WEB Laboratory at University of Kragujevac | Arduino UNO Arduino DUE | X2GO- Remote Desktop | |||||||||||
| [4] | SYS-STEM Hub | [35] | Arduino UNO | C/C++ | Raspberry Pi | SYS-STEM Hub [35] | No | No | Web Interface | No | RPI Camera module | No | No | |
| [19] | Wrocław University of Science and Technology WUST | STM32 microcontrollers
| Raspberry Pi | RPI Camera module | ||||||||||
| [20] | Arduino UNO | Raspberry Pi 3B+ | Yes | |||||||||||
| [21,22] | IOT-OPEN.EU VREL | [35] | Arduino Uno ESP 8266 (ESP-12E); | C/C++ | Raspberry-Pi 2 & 3 | VREL management server | Web Interface | RPI Camera module | ||||||
| [23] | μLAB-Polytechnic Institute of Porto | ATmega328p | Raspberry Pi | Yes | Web Interface | Webcam | ||||||||
| [24,36] | Block.Ino -University of Santa Catarina, Brazil | Arduino | visual programming environment | RELLE [37] | Yes | |||||||||
| [25] | ITMO.cLAB-ITMO University | SDK-1.1M STM32F407VG microcontroller TFK-4.0U MA842 analog I/O module | ||||||||||||
| [26] | MK20DX128VLH5 by NXP Semiconductors | Chrome Remote Desktop | ||||||||||||
| [28] | ArduinoRL | Arduino | LabsLand [30] | No | Web Interface | Yes | ||||||||
| [27] | UNED | ATmega328p ATmega2560 MKR1000 | Raspberry Pi | Web Interface | Yes |
Users:
| Administrators:
|
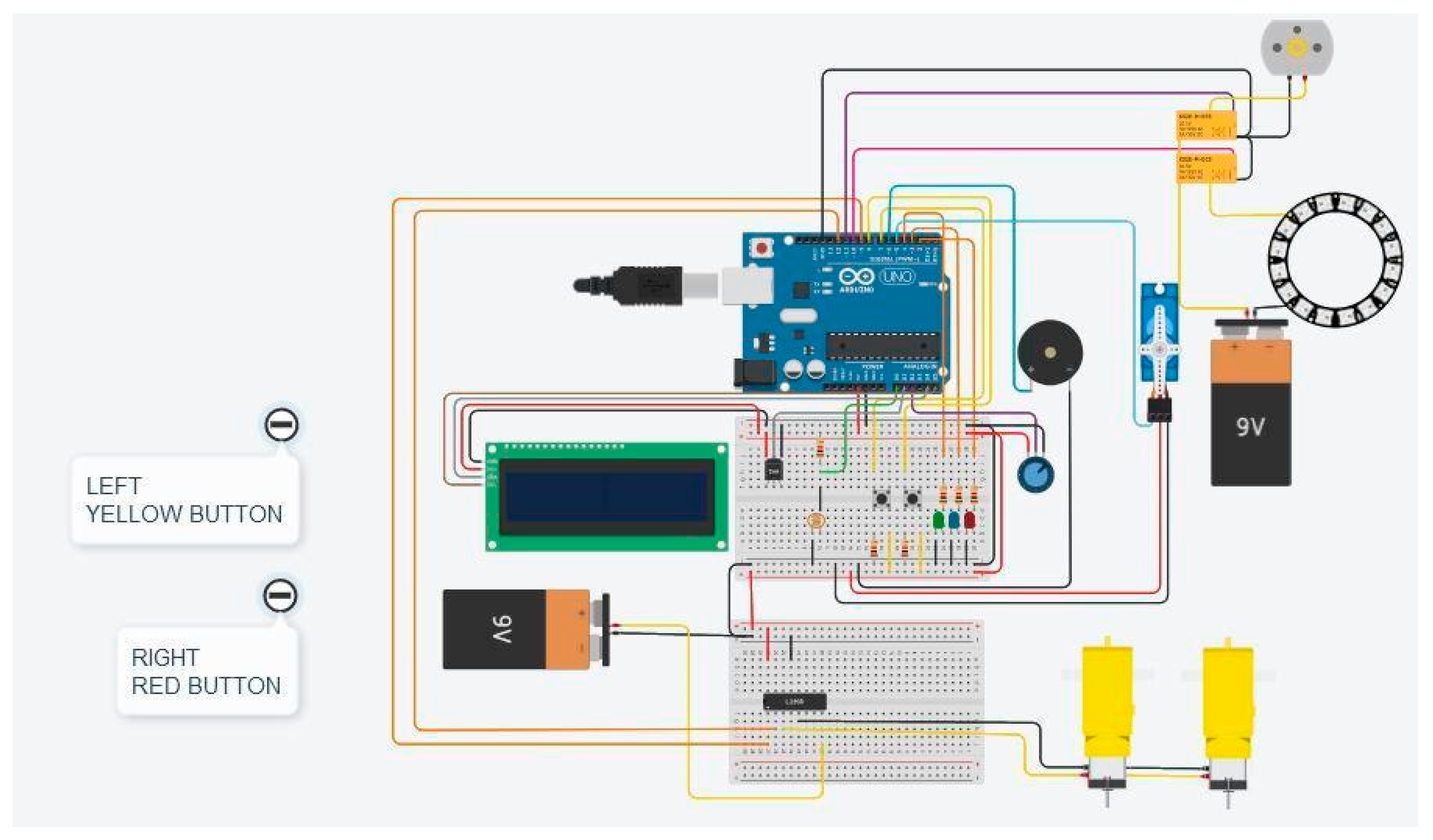
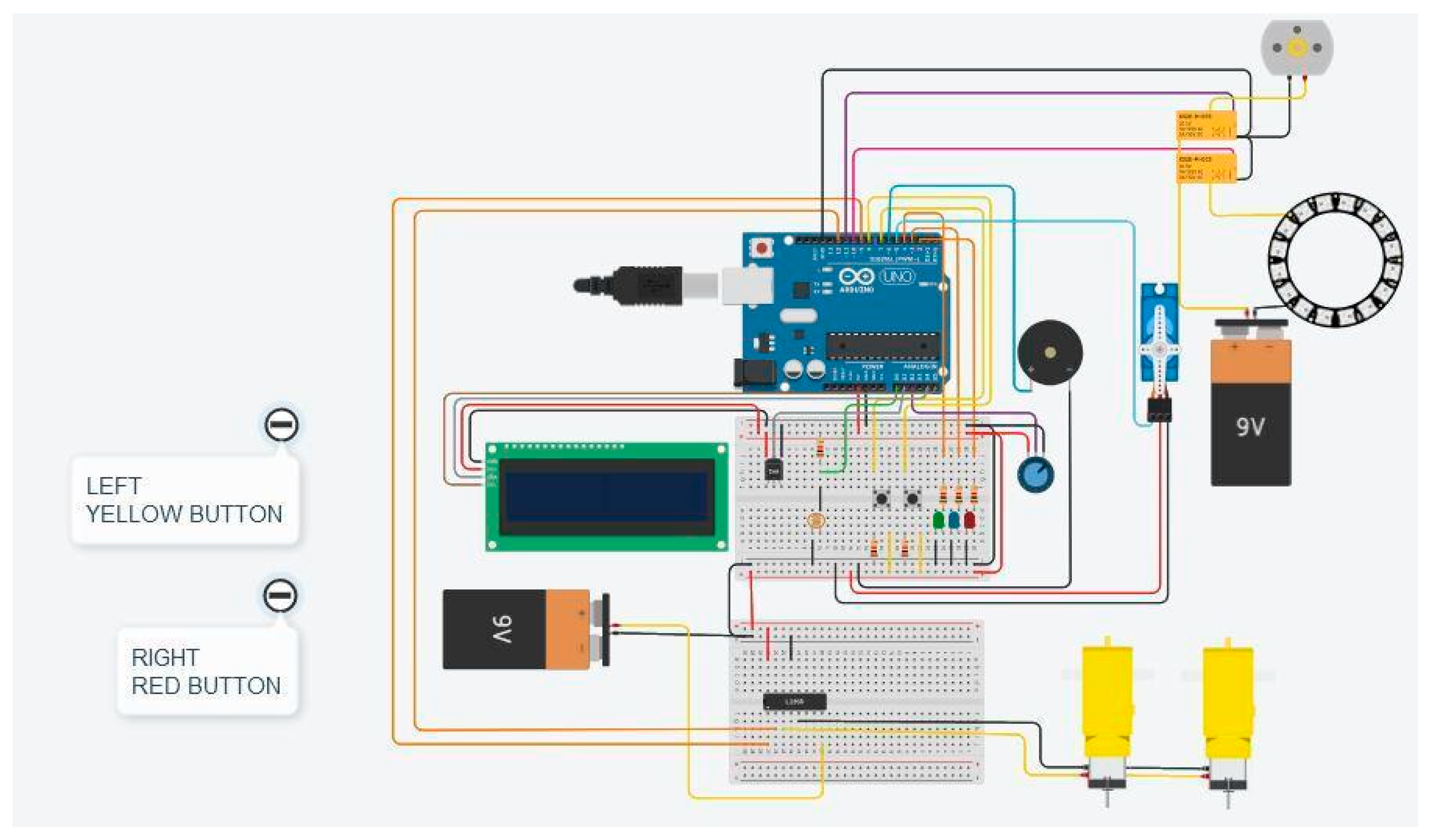
| Three LEDs connected to pins 2, 3, and 4 |
| One servo motor connected to pin 5 |
| One buzzer connected to pin 6 |
| Two push buttons connected to pins 7 and 8 |
| One HW95 H-Bridge connected on pins 9, 12, and 13 |
| One relay connected on pin 10, which turns on an LED stripe One relay connected on pin 11, which turns on a fan |
| One LCD connected to A0 and A1 |
| One potentiometer connected on pin A3 |
| One photoresistor connected on pin A4 |
| One temperature sensor connected on A5 |
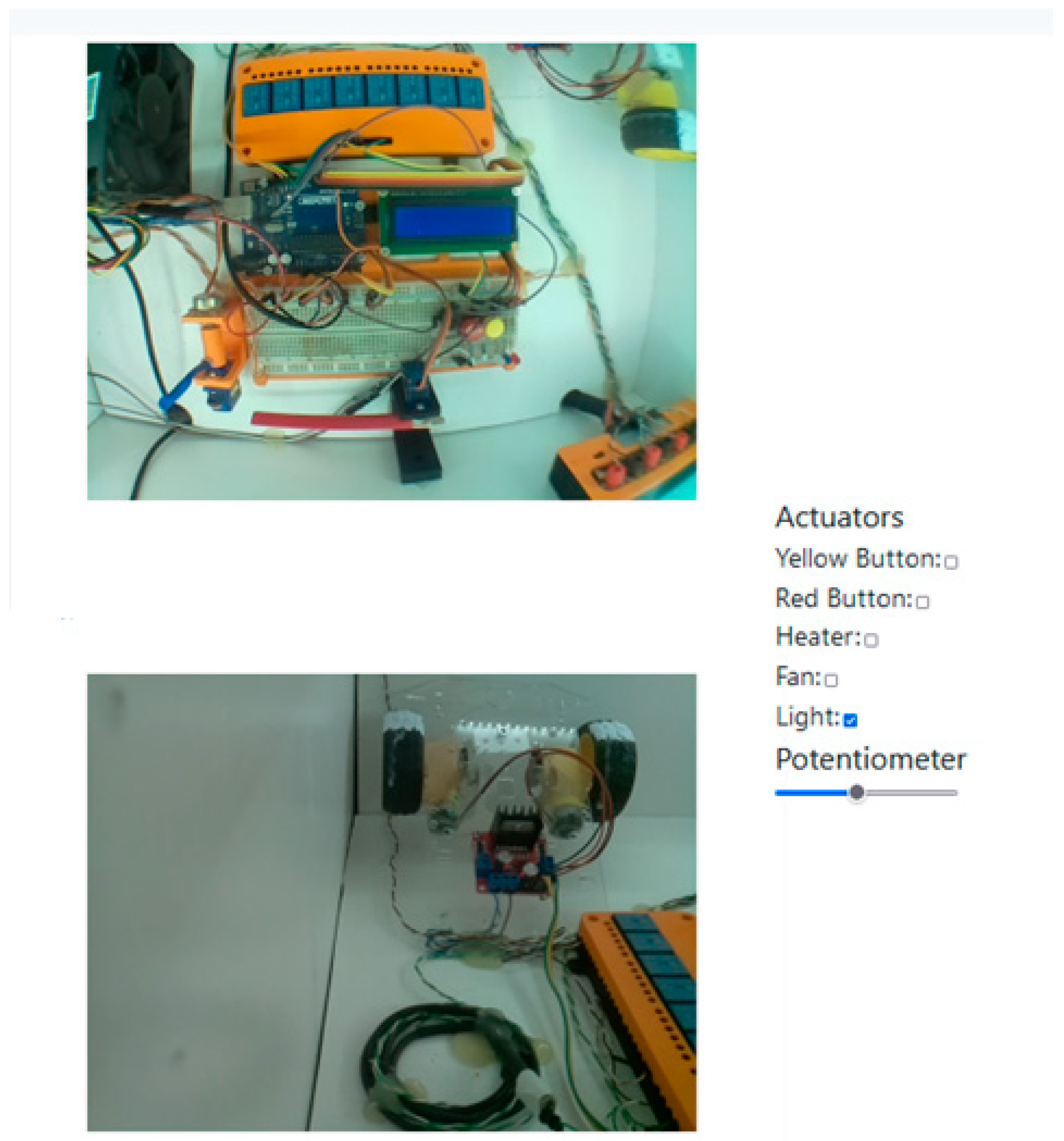
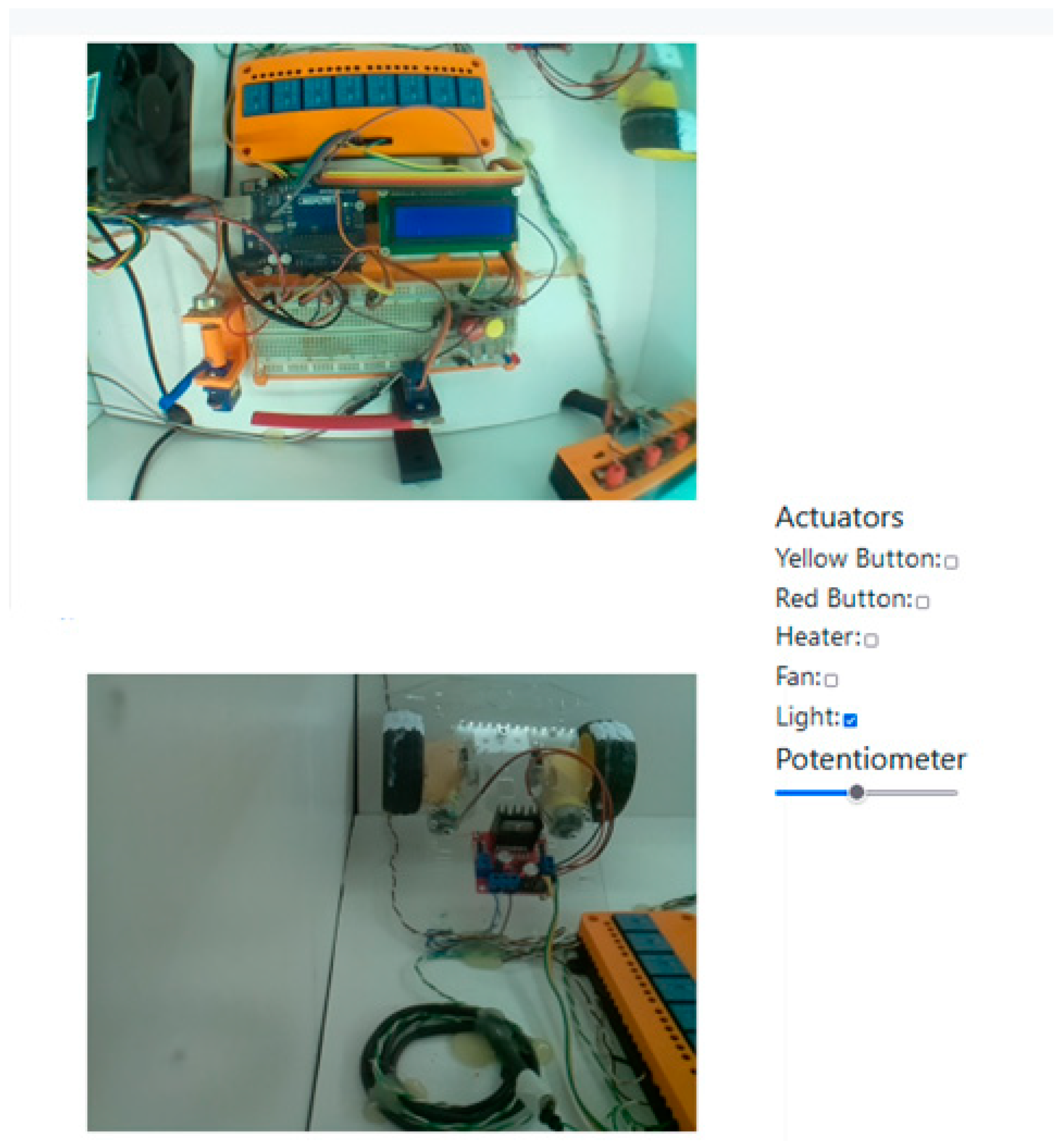
| Relay 1–Activates RL lights |
| Relay 2–Pushes red button |
| Relay 3–Pushes yellow button |
| Relay 4–Activates heating resistor |
| Relay 5–Activates fan |
| Relay 6–Future use |
| Relay 7–Future use |
| Relay 8–Future use |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garefalakis, M.; Kamarianakis, Z.; Panagiotakis, S. Towards a Supervised Remote Laboratory Platform for Teaching Microcontroller Programming. Information 2024, 15, 209. https://doi.org/10.3390/info15040209
Garefalakis M, Kamarianakis Z, Panagiotakis S. Towards a Supervised Remote Laboratory Platform for Teaching Microcontroller Programming. Information. 2024; 15(4):209. https://doi.org/10.3390/info15040209
Chicago/Turabian StyleGarefalakis, Manos, Zacharias Kamarianakis, and Spyros Panagiotakis. 2024. "Towards a Supervised Remote Laboratory Platform for Teaching Microcontroller Programming" Information 15, no. 4: 209. https://doi.org/10.3390/info15040209
APA StyleGarefalakis, M., Kamarianakis, Z., & Panagiotakis, S. (2024). Towards a Supervised Remote Laboratory Platform for Teaching Microcontroller Programming. Information, 15(4), 209. https://doi.org/10.3390/info15040209