
Detection of Random Body Movements Using Clustering-Based Methods in Bioradar Systems

 , ,
, ,  , ,
, ,  and
and 
Abstract

1. Introduction
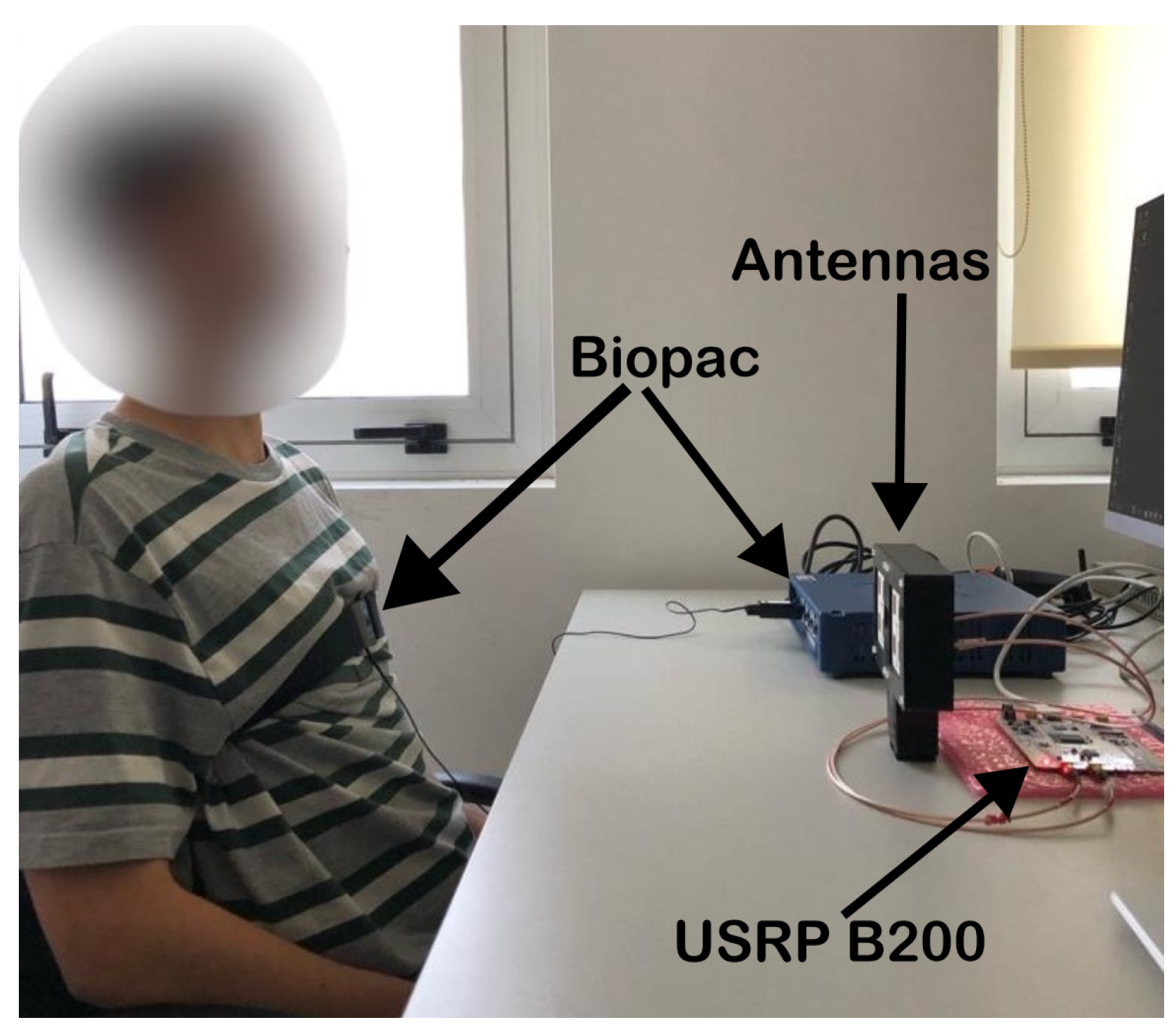
2. Dataset and Setup Description
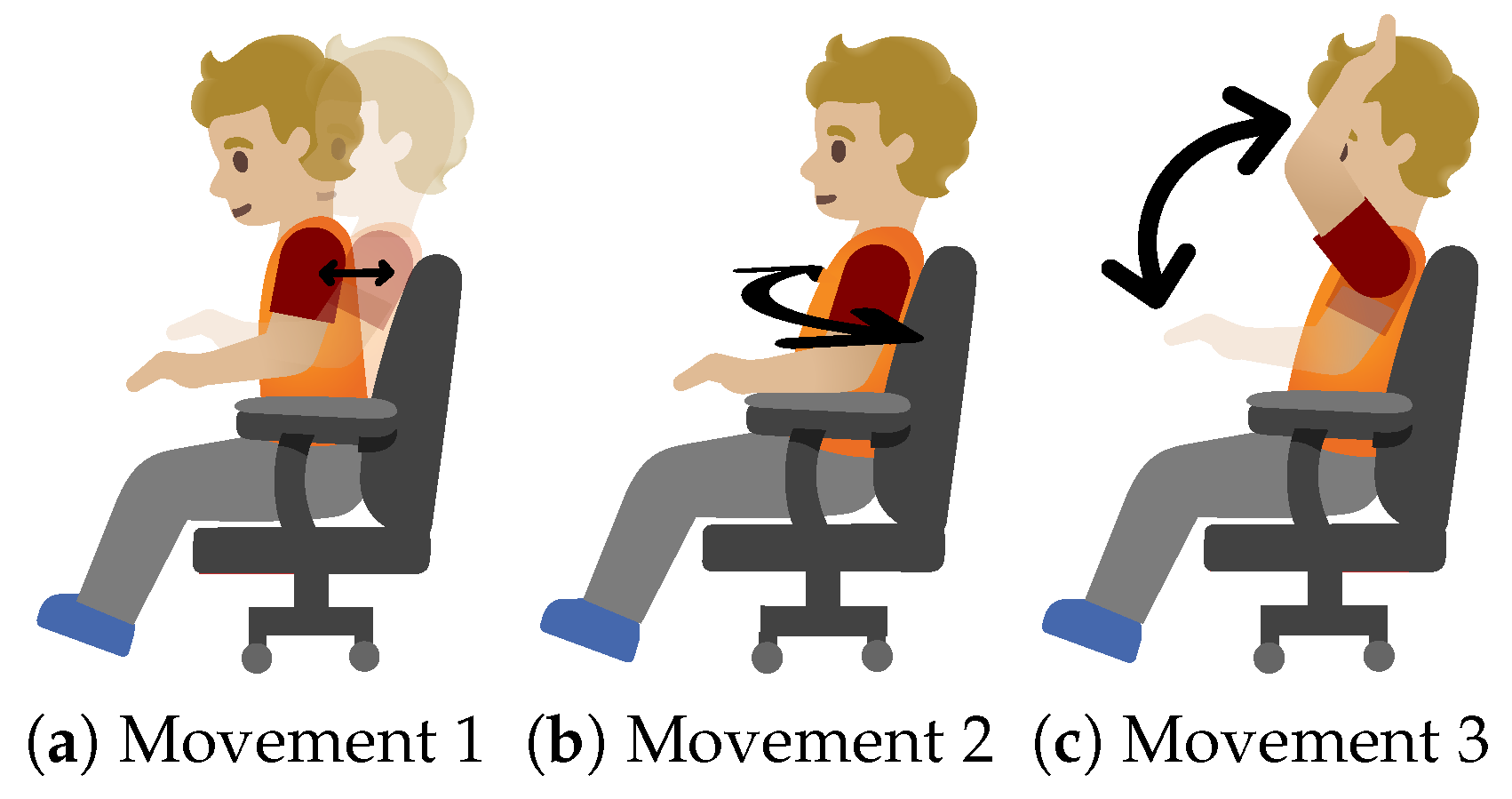
- Movement 1—Moving the chest back and forth (approximately 10 cm);
- Movement 2—Rotating the body to each side (approximately 30–45 degrees);
- Movement 3—Moving each arm above the head, one at a time.
3. Clustering Methods
3.1. K-Means Clustering
3.2. Density-Based Spatial Clustering of Applications with Noise
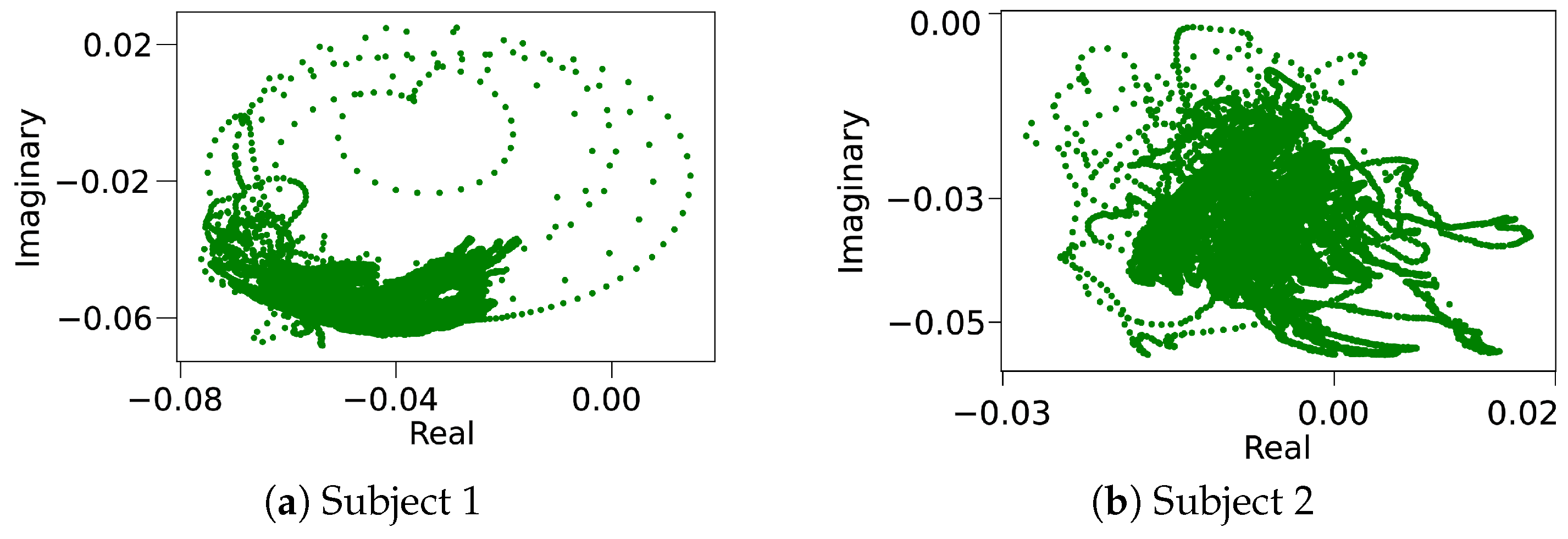
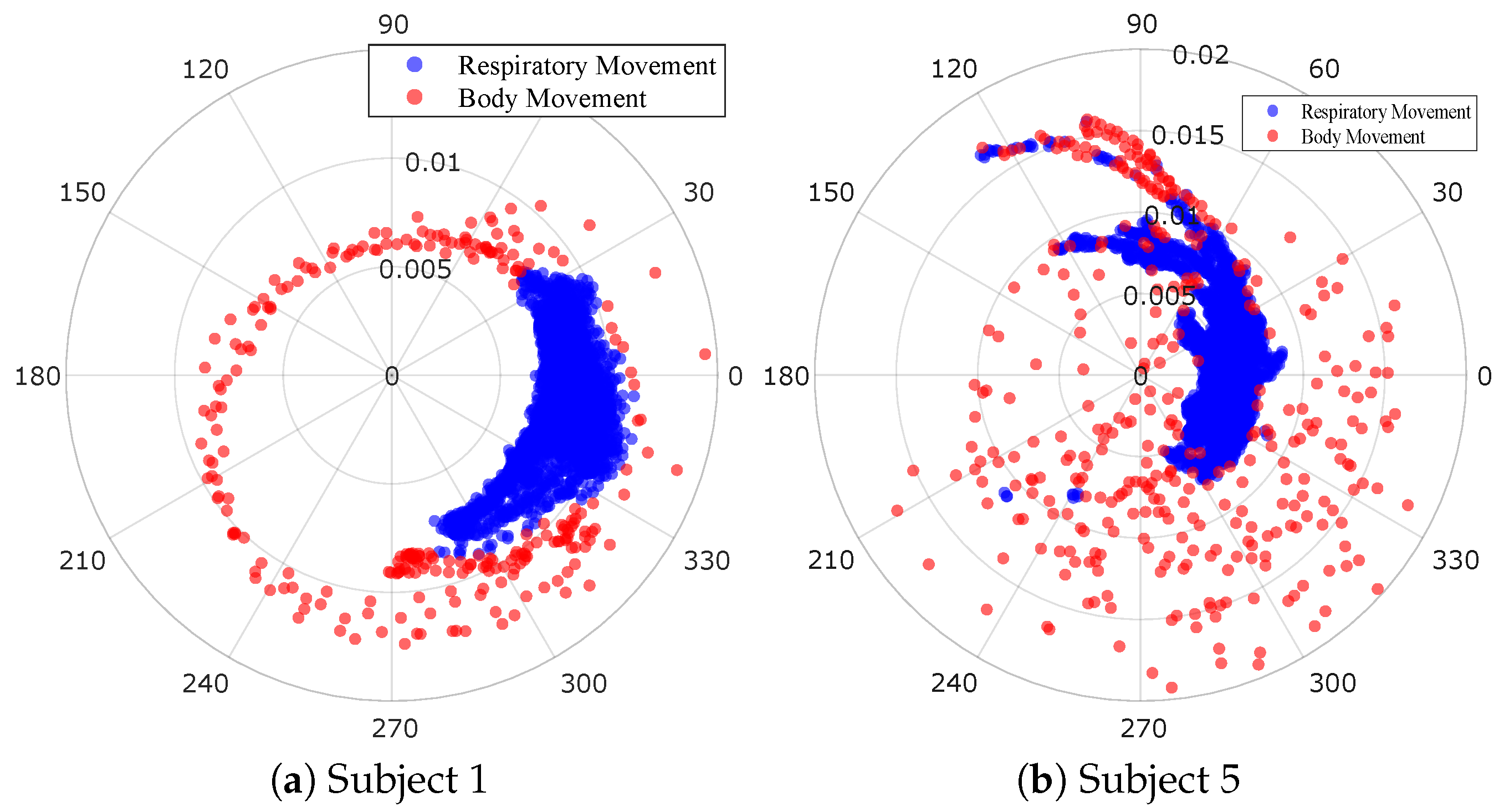
3.3. Data Description, Visualization and Statistical Analysis
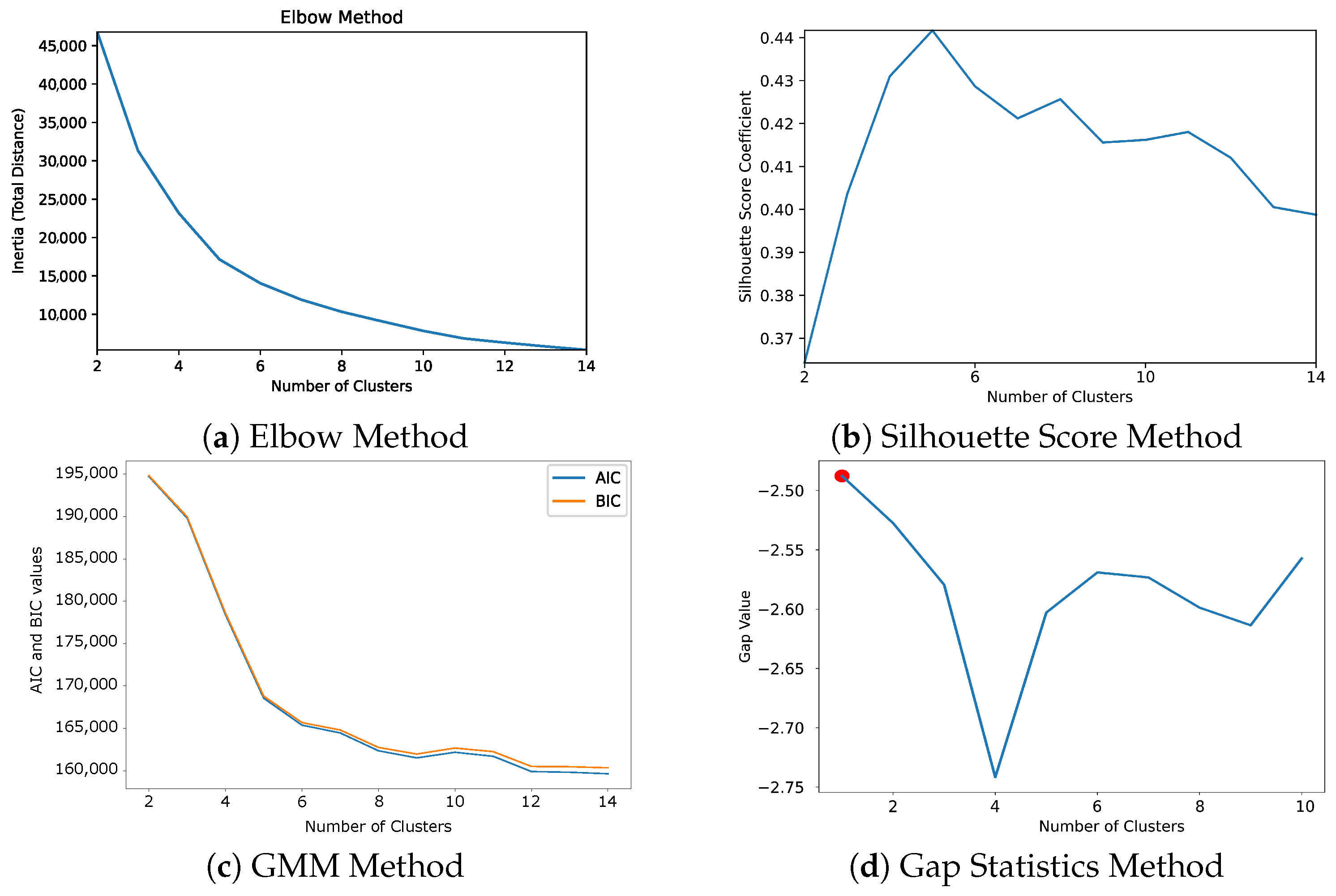
3.4. Implementation
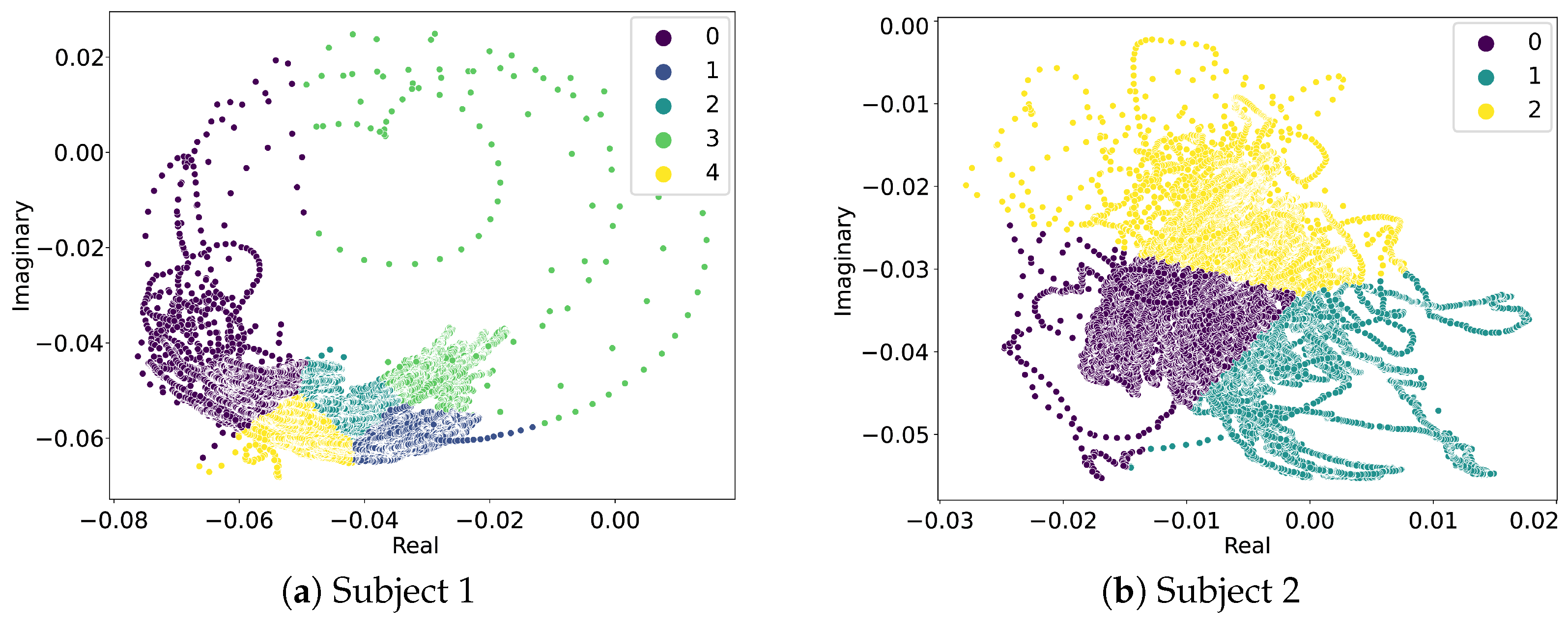
3.4.1. K-Means
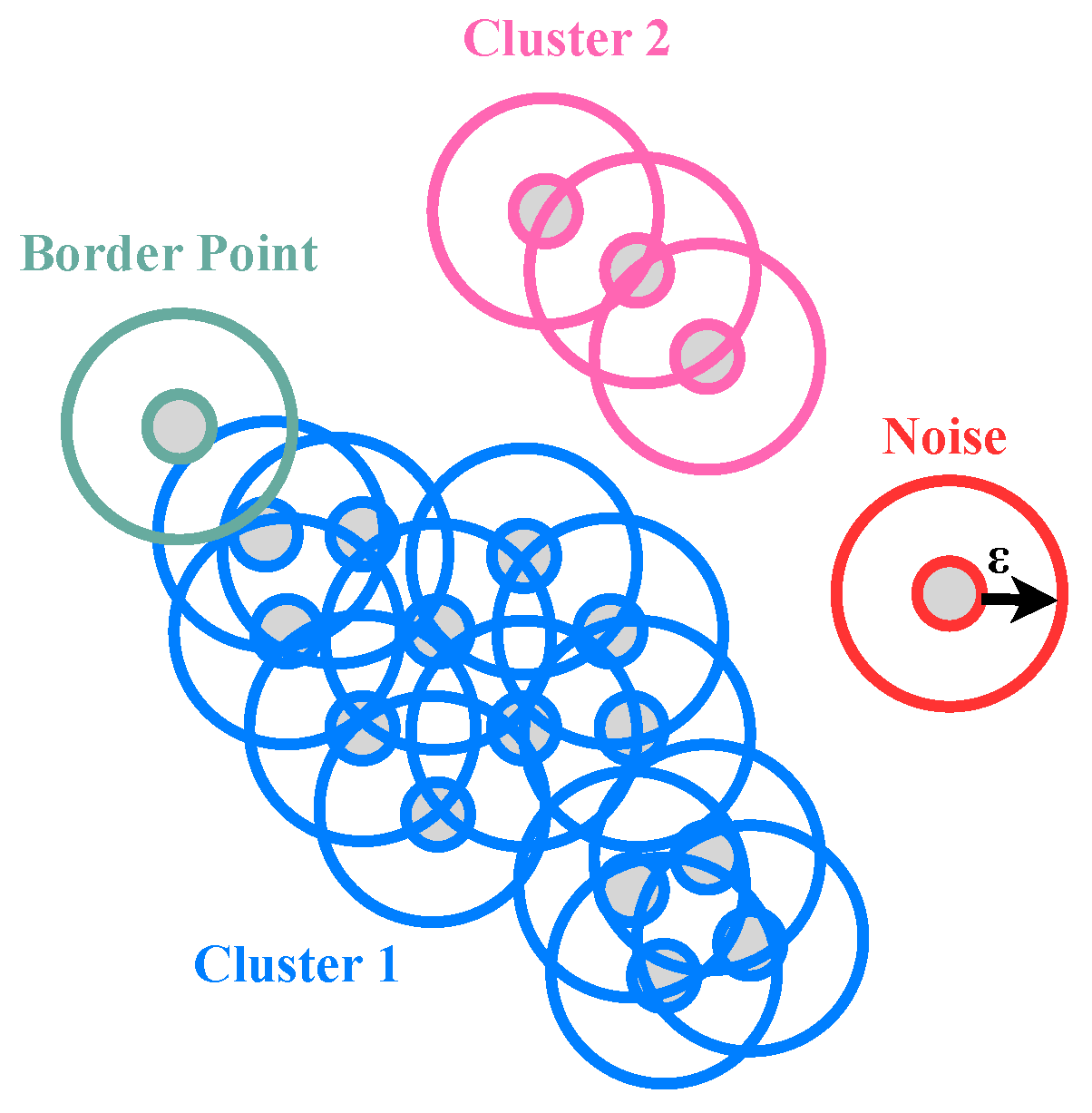
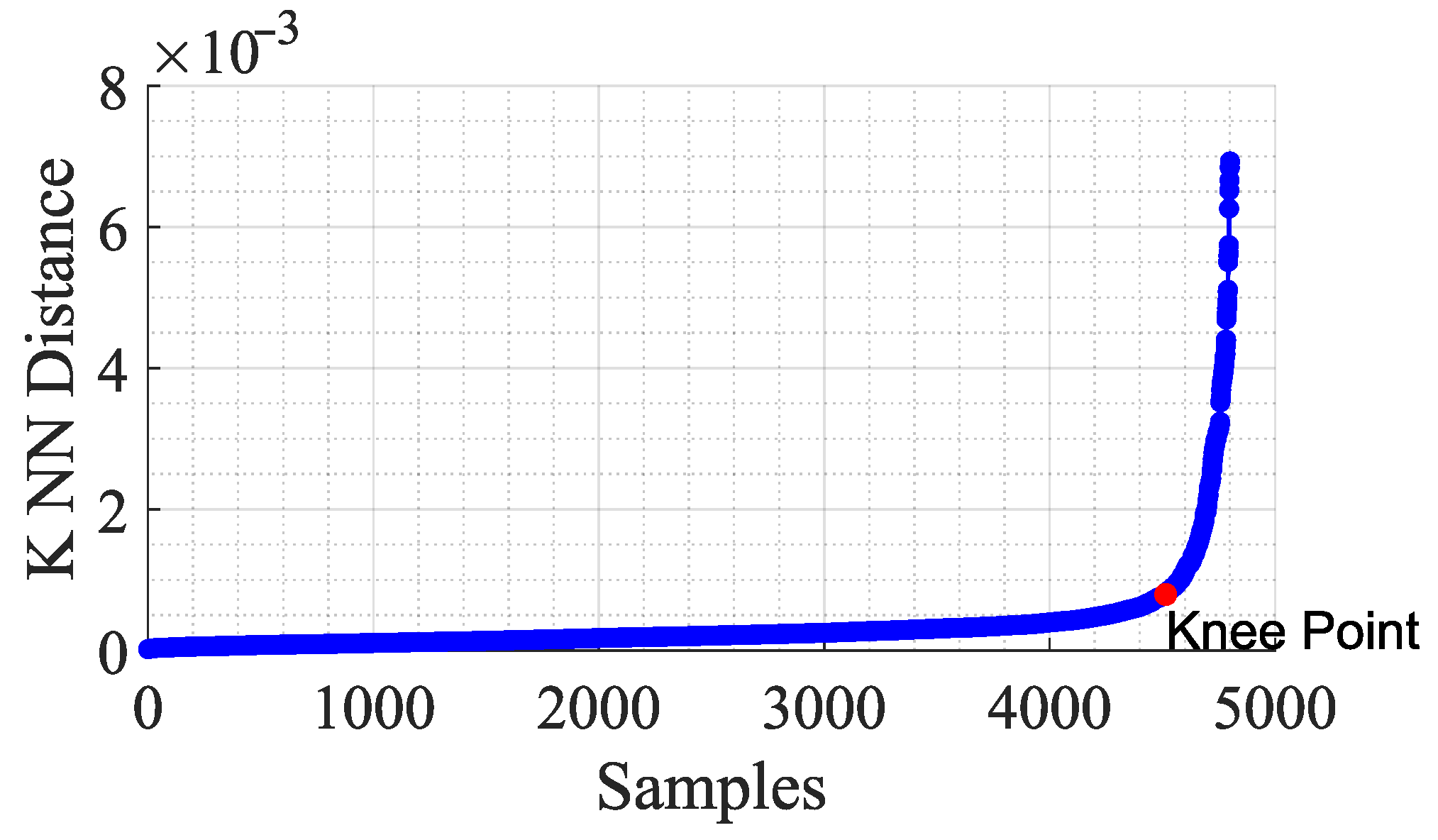
3.4.2. DBSCAN
3.5. K-Means vs. DBScan
4. Methodology Description
4.1. DBScan
- True Positive (TP): Correct detection of BM;
- False Positive (FP): False detection of BM;
- True Negative (TN): Correct detection of RM;
- False Negative (FN): False detection of RM;
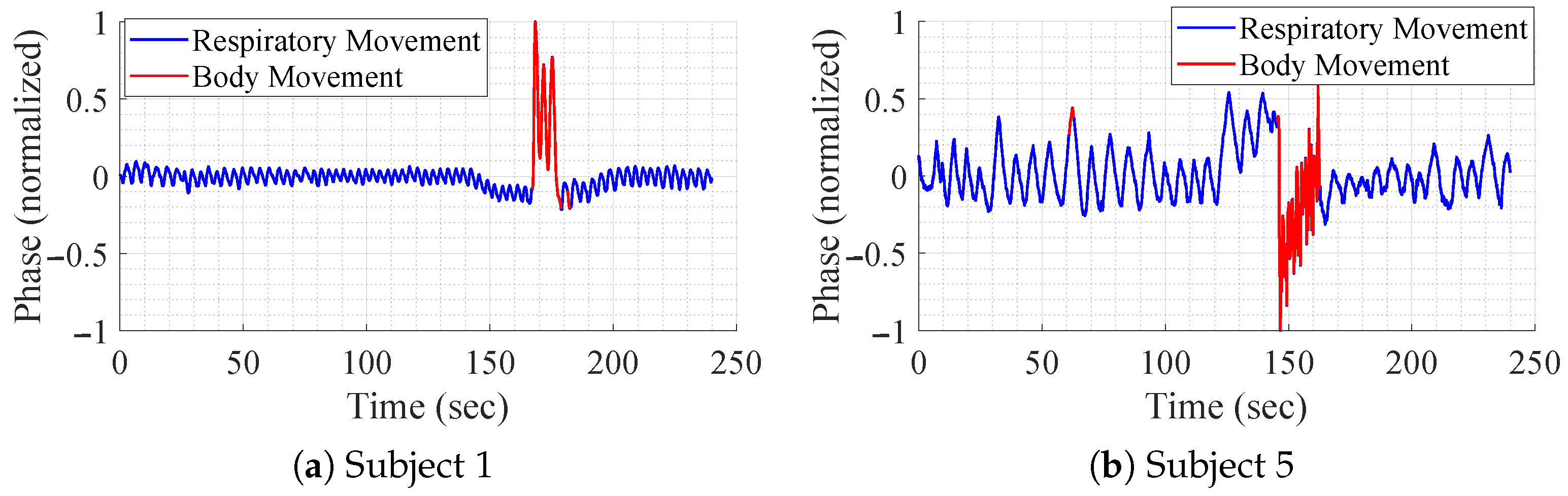
4.2. Noise Segmentation
- Deeper breaths can generate FP (i.e., incorrectly labeling sequences as BM).
- FN can be generated by certain types of movement that generate random points spread over the real/imaginary axis and by the breathing itself, even when a person is not moving.
- Windowing: The binary data obtained from the DBSCAN algorithm (0 = RM, and 1 = BM) are divided into overlapping windows of fixed size WindowSize and an overlap OverlapPercentage.
- Ones percentage calculation: Since, even when there is motion, some points are still often labeled in the RM cluster, the percentage of one-valued points is calculated within each window.
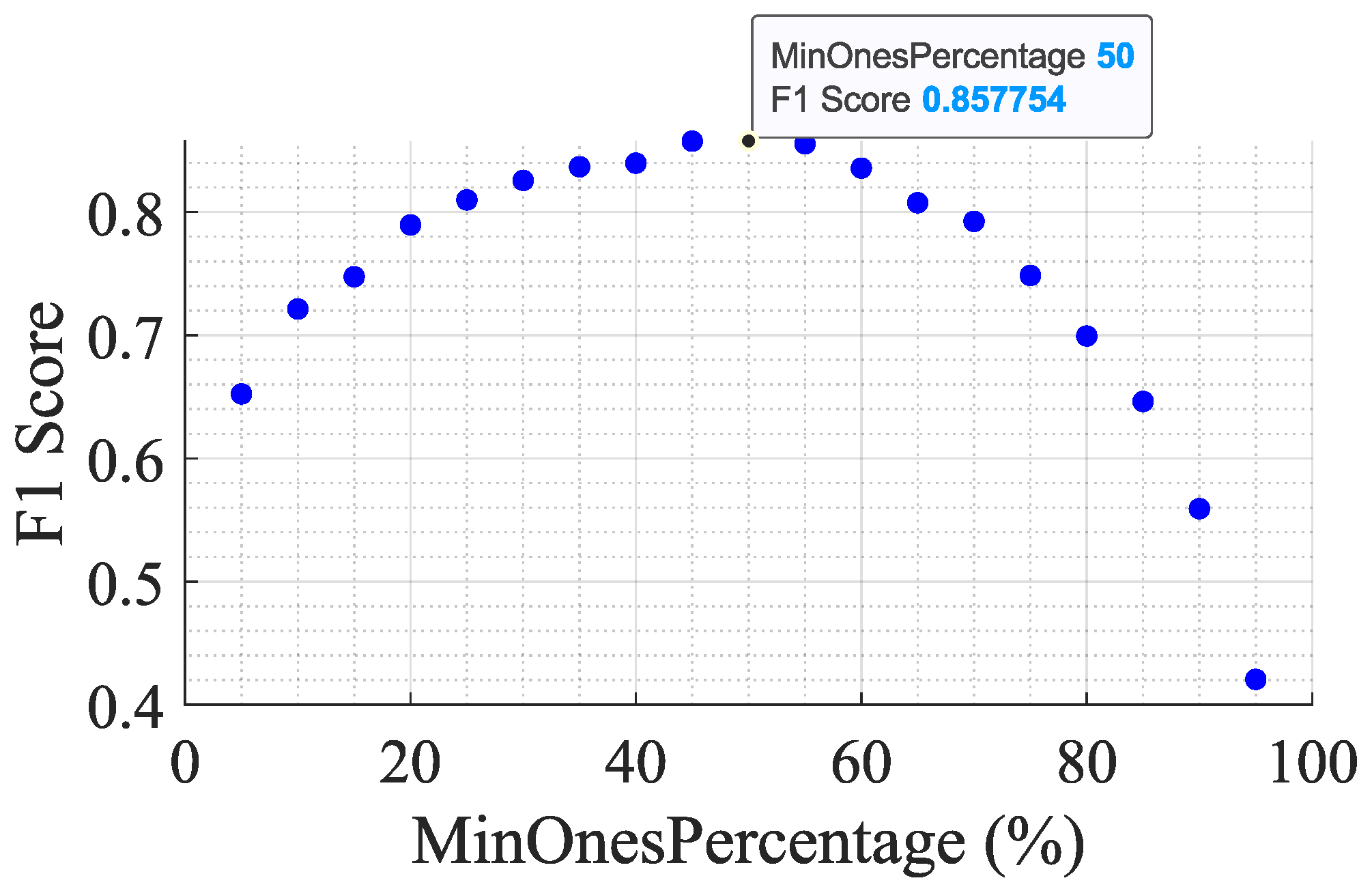
- Threshold-Based Decision: A decision criterion is established based on a threshold parameter, denoted as minOnesPercentage. If the calculated “ones” percentage within a window surpasses this threshold, the window is labeled as a BM segment; otherwise, it is labeled as RM segment.
- BM Segment Stitching: The windows identified as BM segments are combined to form larger regions of BM. This step is pretty simple, and it just takes the end of one BM section and the start of the following one and verifies the distance (in samples) between both. If the distance is lower than a variable: maxStitchDistance, then the two segments are grouped into a contiguous one.
5. DBScan Parameter Generalization
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Islam, S.M.M. Radar-based remote physiological sensing: Progress, challenges, and opportunities. Front. Physiol. 2022, 13, 955208. [Google Scholar] [CrossRef] [PubMed]
- Gu, C.; Wang, G.; Li, Y.; Inoue, T.; Li, C. A Hybrid Radar-Camera Sensing System with Phase Compensation for Random Body Movement Cancellation in Doppler Vital Sign Detection. IEEE Trans. Microw. Theory Tech. 2013, 61, 4678–4688. [Google Scholar] [CrossRef]
- Gouveia, C.; Vieira, J.; Pinho, P. A review on methods for random motion detection and compensation in bio-radar systems. Sensors 2019, 19, 604. [Google Scholar] [CrossRef]
- Czerkawski, M.; Ilioudis, C.; Clemente, C.; Michie, C.; Andonovic, I.; Tachtatzis, C. Interference Motion Removal for Doppler Radar Vital Sign Detection Using Variational Encoder-Decoder Neural Network. In Proceedings of the 2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 7–14 May 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Gu, C.; Wang, J.; Lien, J. Deep Neural Network based Body Movement Cancellation for Doppler Radar Vital Sign Detection. In Proceedings of the 2019 IEEE MTT-S International Wireless Symposium (IWS), Guangzhou, China, 19–22 May 2019; pp. 1–3. [Google Scholar] [CrossRef]
- Ye, C.; Gui, G.; Ohtsuki, T. Deep Clustering with LSTM for Vital Signs Separation in Contact-free Heart Rate Estimation. In Proceedings of the ICC 2020-2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Woo, S. Online continual learning for human activity recognition. Pervasive Mob. Comput. 2023, 93, 101817. [Google Scholar] [CrossRef]
- Gouveia, C.; Albuquerque, D.; Vieira, J.; Pinho, P. Dynamic Digital Signal Processing Algorithm for Vital Signs Extraction in Continuous-Wave Radars. Remote Sens. 2021, 13, 4079. [Google Scholar] [CrossRef]
- Zhang, H.; Jian, P.; Yao, Y.; Liu, C.; Wang, P.; Chen, X.; Du, L.; Zhuang, C.; Fang, Z. Radar-Beat: Contactless beat-by-beat heart rate monitoring for life scenes. Biomed. Signal Process. Control 2023, 86, 105360. [Google Scholar] [CrossRef]
- Hu, W.; Lie, D.; Kakade, M.U.; Ichapurapu, R.; Mane, S.; Lopez, J.; Li, Y.; Li, C.; Banister, R.; Dentino, A.; et al. An intelligent non-contact wireless monitoring system for vital signs and motion detection. In Proceedings of the 2010 International Conference on System Science and Engineering, Taipei, Taiwan, 1–3 July 2010; pp. 190–194. [Google Scholar] [CrossRef]
- Mercuri, M.; Lorato, I.R.; Liu, Y.H.; Wieringa, F.; Hoof, C.V.; Torfs, T. Vital-sign monitoring and spatial tracking of multiple people using a contactless radar-based sensor. Nat. Electron. 2019, 2, 252–262. [Google Scholar] [CrossRef]
- Khan, F.; Cho, S.H. A detailed algorithm for vital sign monitoring of a stationary/non-stationary human through IR-UWB radar. Sensors 2017, 17, 290. [Google Scholar] [CrossRef] [PubMed]
- Baldi, M.; Appignani, F.; Zanaj, B.; Chiaraluce, F. Body movement compensation in UWB radars for respiration monitoring. In Proceedings of the 2012 IEEE First AESS European Conference on Satellite Telecommunications (ESTEL), Rome, Italy, 2–5 October 2012; pp. 1–6. [Google Scholar]
- Gu, Z.; Wang, J.; Shen, F.; Xu, K.; Ye, D.; Huangfu, J.; Li, C.; Ran, L. Blind Separation of Doppler Human Gesture Signals Based on Continuous-Wave Radar Sensors. IEEE Trans. Instrum. Meas. 2019, 68, 2659–2661. [Google Scholar] [CrossRef]
- Khusainov, R.; Azzi, D.; Achumba, I.E.; Bersch, S.D. Real-time human ambulation, activity, and physiological monitoring: Taxonomy of issues, techniques, applications, challenges and limitations. Sensors 2013, 13, 12852–12902. [Google Scholar] [CrossRef] [PubMed]
- Nicolò, A.; Massaroni, C.; Schena, E.; Sacchetti, M. The importance of respiratory rate monitoring: From healthcare to sport and exercise. Sensors 2020, 20, 6396. [Google Scholar] [CrossRef] [PubMed]
- Jain, A.; Duin, R.; Mao, J. Statistical pattern recognition: A review. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 4–37. [Google Scholar] [CrossRef]
- Xu, X.; Ester, M.; Kriegel, H.P.; Sander, J. A distribution-based clustering algorithm for mining in large spatial databases. In Proceedings of the Proceedings 14th International Conference on Data Engineering, Orlando, FL, USA, 23–27 February 1998; pp. 324–331. [Google Scholar]
- Yuan, C.; Yang, H. Research on K-Value Selection Method of K-means Clustering Algorithm. J 2019, 2, 226–235. [Google Scholar] [CrossRef]
- Kaoungku, N.; Suksut, K.; Chanklan, R.; Kerdprasop, K.; Kerdprasop, N. The silhouette width criterion for clustering and association mining to select image features. Int. J. Mach. Learn. Comput. 2018, 8, 69–73. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern Recognition and Machine Learning (Information Science and Statistics); Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Tibshirani, R.; Walther, G.; Hastie, T. Estimating the number of clusters in a data set via the gap statistic. J. R. Stat. Soc. Ser. B (Stat. Methodol.) 2001, 63, 411–423. [Google Scholar] [CrossRef]
- Wei, J.; sun, S. Commercial Activity Cluster Recognition with Modified DBSCAN Algorithm: A Case Study of Milan. In Proceedings of the 2019 IEEE International Smart Cities Conference (ISC2), Casablanca, Morocco, 14–17 October 2019; pp. 228–234. [Google Scholar]
- Sander, J.; Ester, M.K. Density-Based Clustering in Spatial Databases: The Algorithm GDBSCAN and Its Applications. Data Min. Knowl. Discov. 1998, 2, 169–194. [Google Scholar] [CrossRef]
- Park, B.K.; Lubecke, V.; Boric-Lubecke, O.; Host-Madsen, A. Center tracking quadrature demodulation for a Doppler radar motion detector. In Proceedings of the 2007 IEEE/MTT-S International Microwave Symposium, Honolulu, HI, USA, 3–8 June 2007; pp. 1323–1326. [Google Scholar]
- Chernov, N. Circle Fit (Pratt Method). 2021. Available online: https://www.mathworks.com/matlabcentral/fileexchange/22643-circle-fit-pratt-method (accessed on 1 August 2023).
- Park, B.K.; Boric-Lubecke, O.; Lubecke, V.M. Arctangent Demodulation with DC Offset Compensation in Quadrature Doppler Radar Receiver Systems. IEEE Trans. Microw. Theory Tech. 2007, 55, 1073–1079. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996; AAAI Press: Washington, DC, USA, 1996. KDD’96. pp. 226–231. [Google Scholar]
- Schubert, E.; Sander, J.; Ester, M.; Kriegel, H.P.; Xu, X. [DBSCAN] Revisited, Revisited: Why and How You Should (Still) Use DBSCAN. ACM Trans. Database Syst. 2017, 42, 1–21. [Google Scholar] [CrossRef]
- Bessrour, M.; Elouedi, Z.; Lefèvre, E. E-DBSCAN: An evidential version of the DBSCAN method. In Proceedings of the 2020 IEEE Symposium Series on Computational Intelligence (SSCI), Canberra, ACT, Australia, 1–4 December 2020; pp. 3073–3080. [Google Scholar] [CrossRef]
- Kaplan, D. Knee Point. MATLAB Central File Exchange. 2023. Available online: https://www.mathworks.com/matlabcentral/fileexchange/35094-knee-point (accessed on 30 August 2023).
- Dice, L.R. Measures of the Amount of Ecologic Association Between Species. Ecology 1945, 26, 297–302. [Google Scholar] [CrossRef]
- Hand, D.; Christen, P. A note on using the F-measure for evaluating record linkage algorithms. Stat. Comput. 2018, 28, 539–547. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset Number | Subject | Gender | BMI (kg/m2) |
|---|---|---|---|
| 1 | 1 | F | 21.6 |
| 2 | F | 19.4 | |
| 2 | 1 | M | 23.6 |
| 2 | F | 18.7 | |
| 3 | M | 30 | |
| 4 | M | 24.4 | |
| 5 | F | 21.6 | |
| 6 | M | 20.4 | |
| 7 | M | 22.26 | |
| 8 | F | 20.82 |
| Subject 1 | Subject 2 | Subject 3 | Subject 4 | |
|---|---|---|---|---|
| k | 2 | 5 | 3 | 2 |
| Best Silhouette Score | 0.488 | 0.442 | 0.408 | 0.587 |
| Subject 1 | Subject 2 | Subject 3 | Subject 4 | |
|---|---|---|---|---|
| 0.11 | 0.14 | 0.14 | 0.14 | |
| Minimum Samples | 80 | 78 | 76 | 80 |
| Best Silhouette Score | 0.359 | 0.297 | 0.523 | 0.061 |
| MinPts | F1 Score | Prec. | Recall | Movement | ||
|---|---|---|---|---|---|---|
| Subject 1 | 71 | 0.0015 | 0.77 | 0.82 | 0.69 | 1 |
| Subject 2 | 90 | 0.0009 | 0.77 | 0.69 | 0.86 | 3 |
| Subject 3 | 39 | 0.0012 | 0.68 | 0.53 | 0.71 | 1 |
| Subject 4 | 22 | 0.0063 | 0.85 | 0.77 | 0.94 | 3 |
| Subject 5 | 3 | 0.0013 | 0.63 | 0.54 | 0.58 | 2 |
| Subject 6 | 59 | 0.0046 | 0.70 | 0.76 | 0.63 | 1 |
| Subject 7 | 13 | 0.0008 | 0.60 | 0.56 | 0.59 | 2 |
| Subject 8 | 7 | 0.0005 | 0.78 | 0.93 | 0.63 | 2 |
| F1 Score | Precision | Recall | |
|---|---|---|---|
| Subject 1 | 0.87 | 0.88 | 0.86 |
| Subject 2 | 0.84 | 0.76 | 0.94 |
| Subject 3 | 0.81 | 0.83 | 0.79 |
| Subject 4 | 0.96 | 0.92 | 1 |
| Subject 5 | 0.80 | 0.90 | 0.72 |
| Subject 6 | 0.90 | 0.98 | 0.82 |
| Subject 7 | 0.80 | 0.70 | 0.93 |
| Subject 8 | 0.93 | 1 | 0.87 |
| Movement | Average Values | |||
|---|---|---|---|---|
| F1 Score | Precision | Recall | ||
| 1 | 0.00048 | 0.83 | 0.81 | 0.87 |
| 2 | 0.00035 | 0.73 | 0.70 | 0.79 |
| 3 | 0.00029 | 0.8 | 0.73 | 0.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rouco, A.; Silva, F.; Soares, B.; Albuquerque, D.; Gouveia, C.; Brás, S.; Pinho, P. Detection of Random Body Movements Using Clustering-Based Methods in Bioradar Systems. Information 2024, 15, 584. https://doi.org/10.3390/info15100584
Rouco A, Silva F, Soares B, Albuquerque D, Gouveia C, Brás S, Pinho P. Detection of Random Body Movements Using Clustering-Based Methods in Bioradar Systems. Information. 2024; 15(10):584. https://doi.org/10.3390/info15100584
Chicago/Turabian StyleRouco, André, Filipe Silva, Beatriz Soares, Daniel Albuquerque, Carolina Gouveia, Susana Brás, and Pedro Pinho. 2024. "Detection of Random Body Movements Using Clustering-Based Methods in Bioradar Systems" Information 15, no. 10: 584. https://doi.org/10.3390/info15100584
APA StyleRouco, A., Silva, F., Soares, B., Albuquerque, D., Gouveia, C., Brás, S., & Pinho, P. (2024). Detection of Random Body Movements Using Clustering-Based Methods in Bioradar Systems. Information, 15(10), 584. https://doi.org/10.3390/info15100584