
Autoencoder Based Analysis of RF Parameters in the Fermilab Low Energy Linac


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
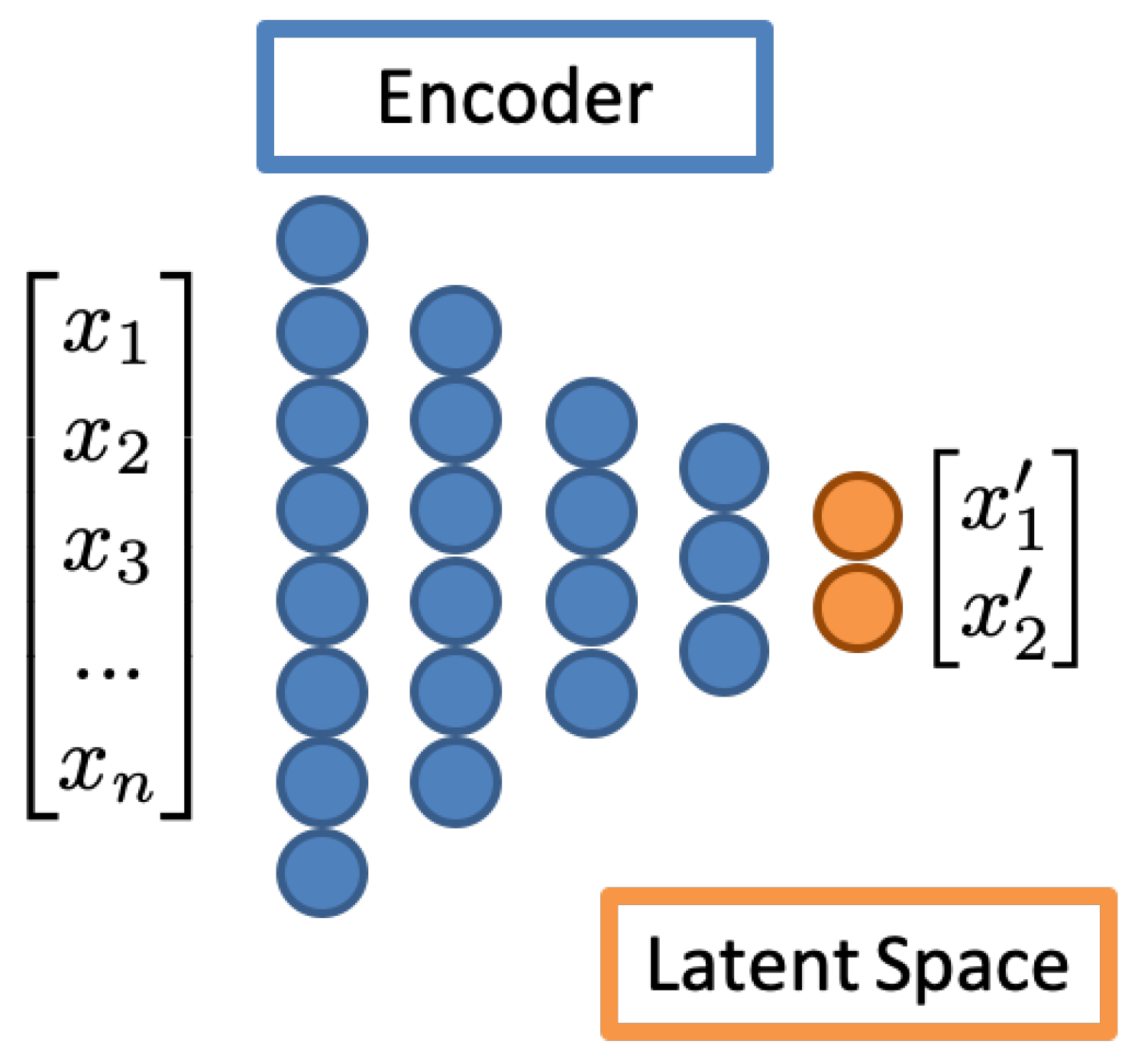
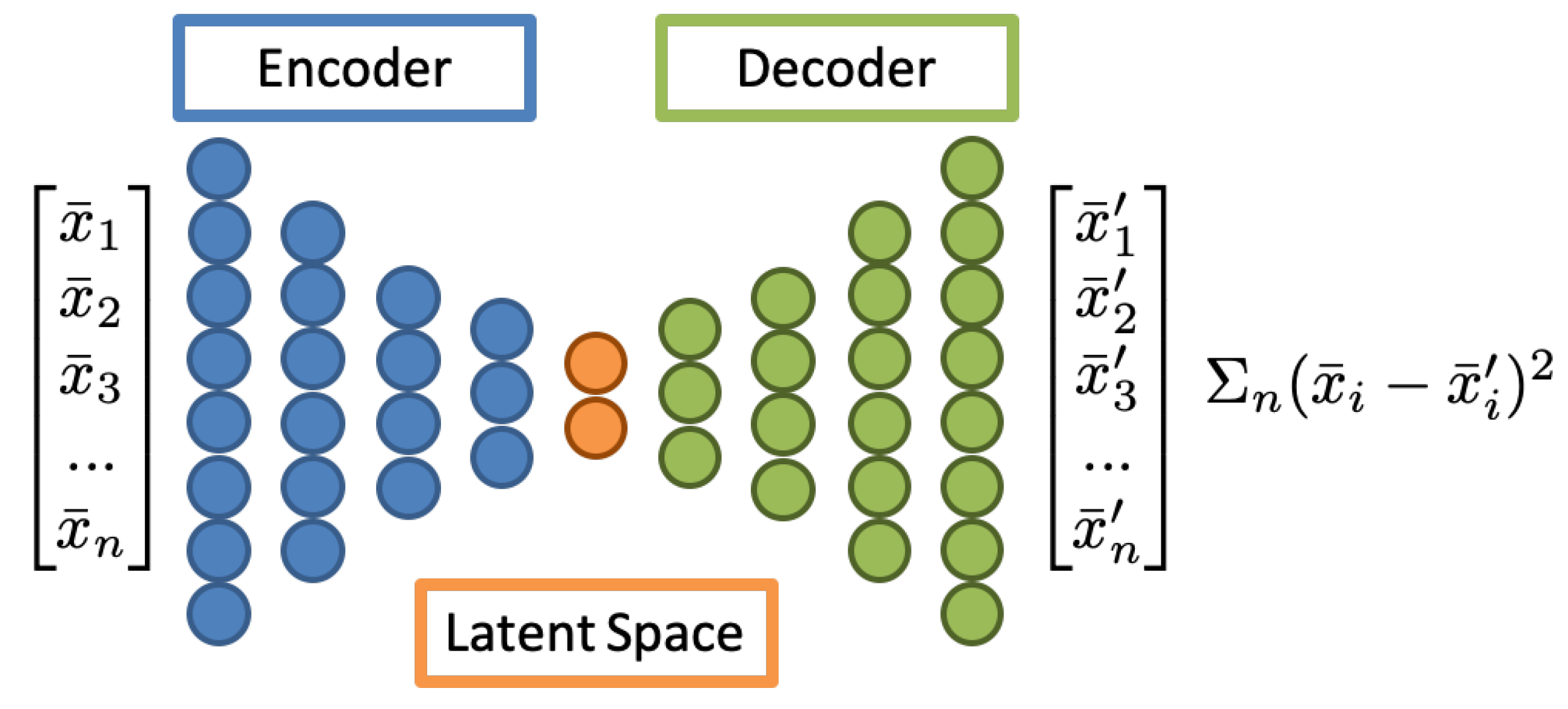
2.1. Autoencoders
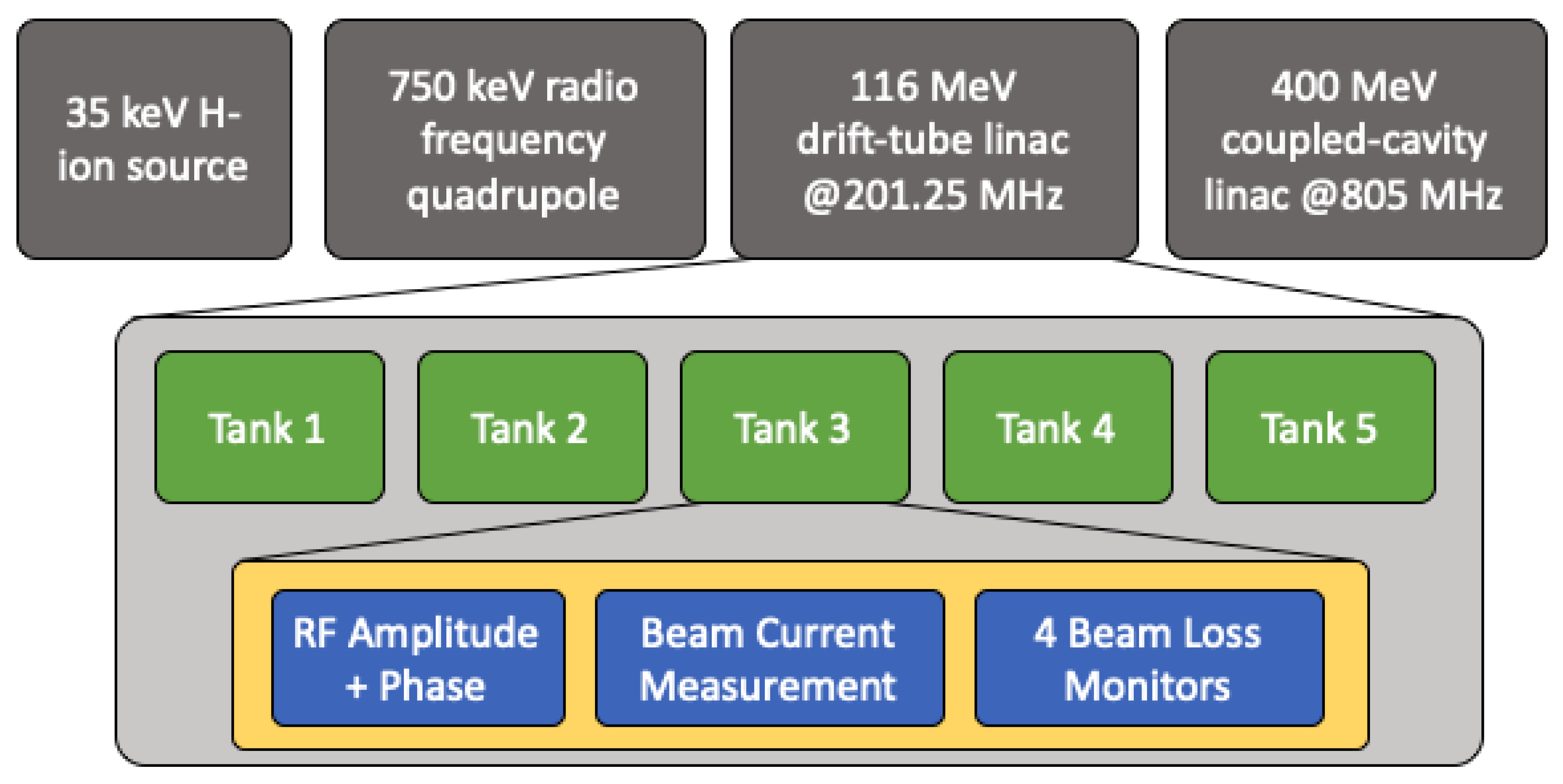
2.2. Overview of the Fermilab Linac
3. Results
3.1. Dimensionality Reduction
3.1.1. Conventional Approaches
3.1.2. Latent Space Analysis
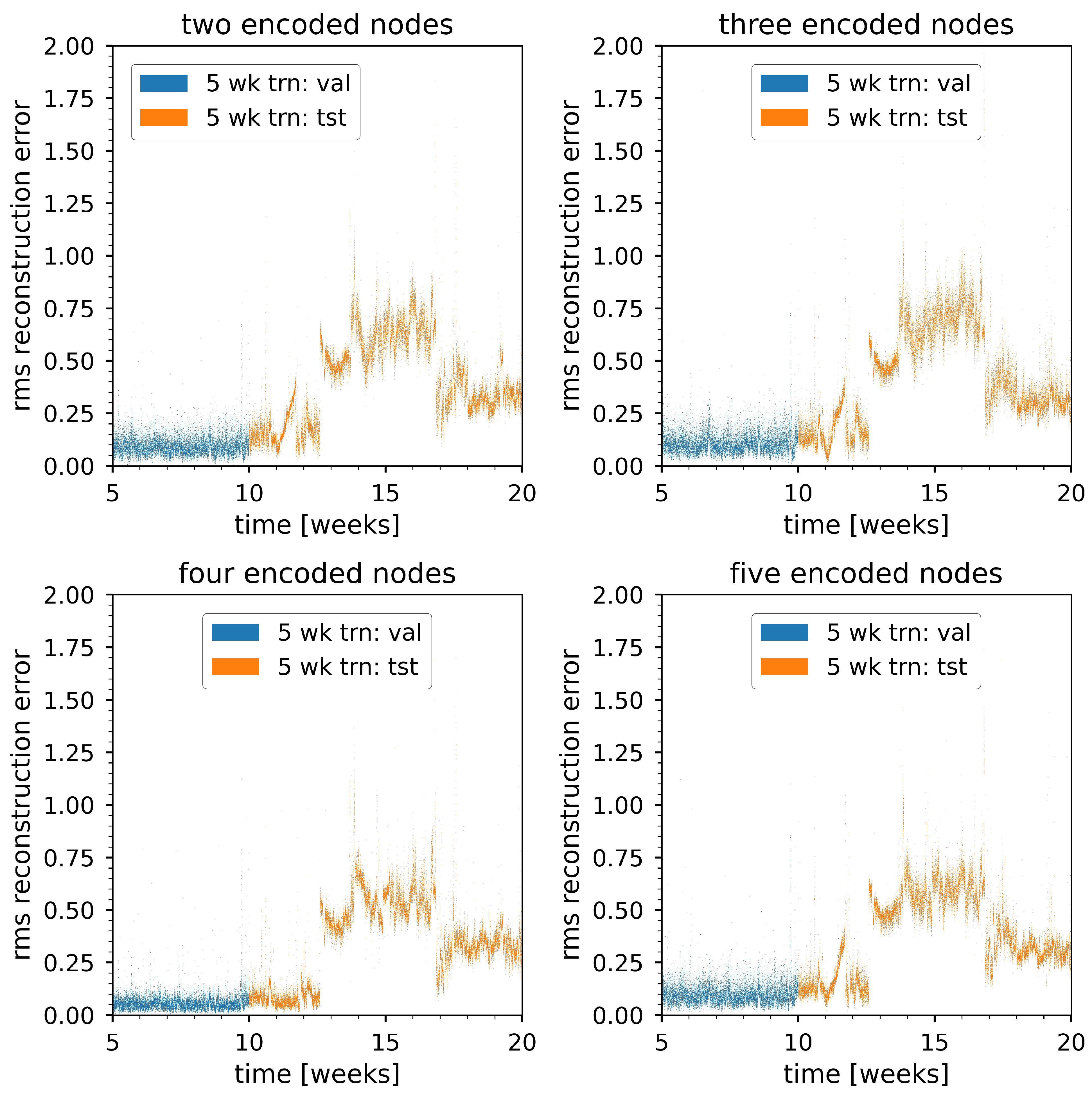
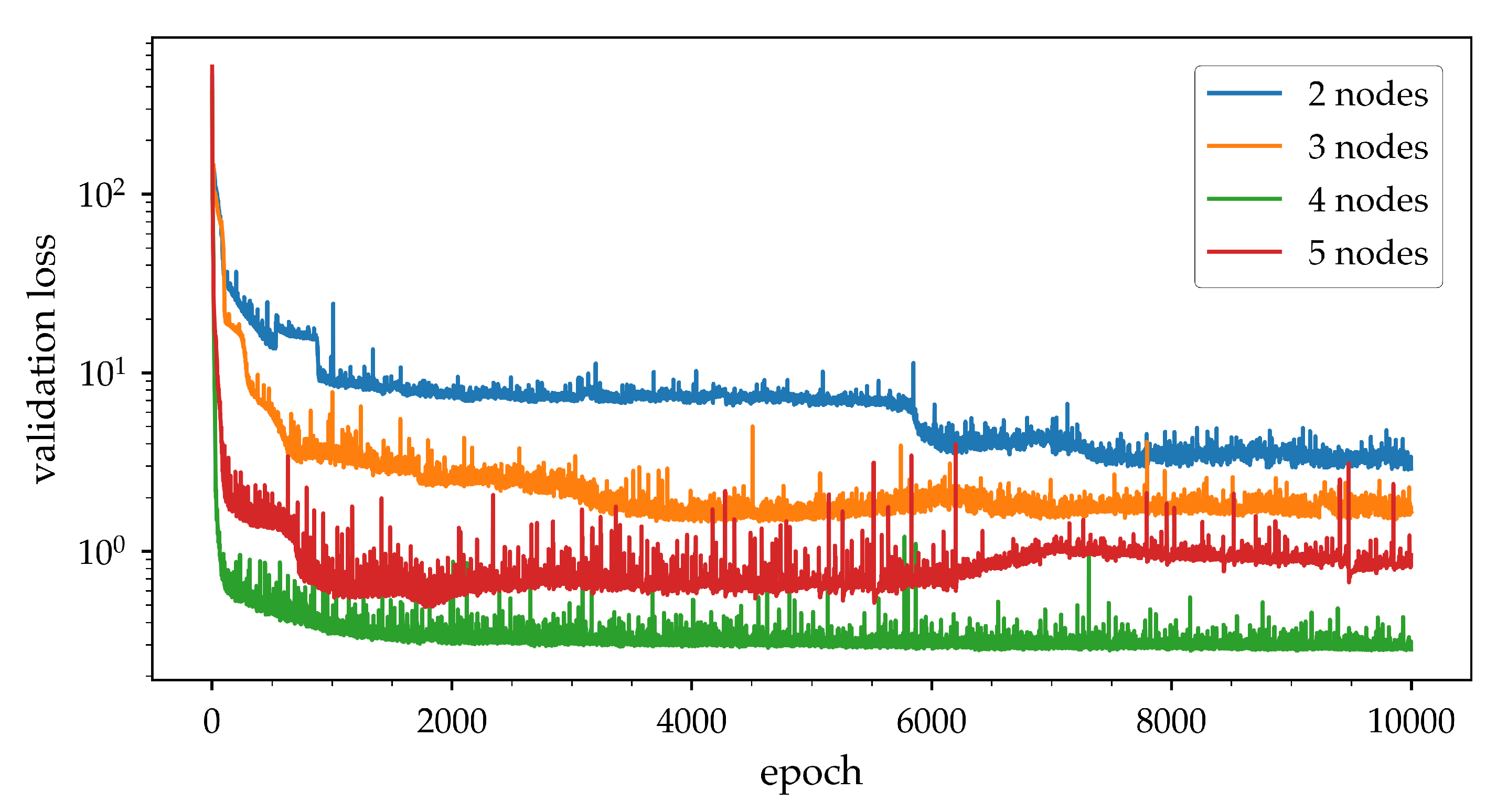
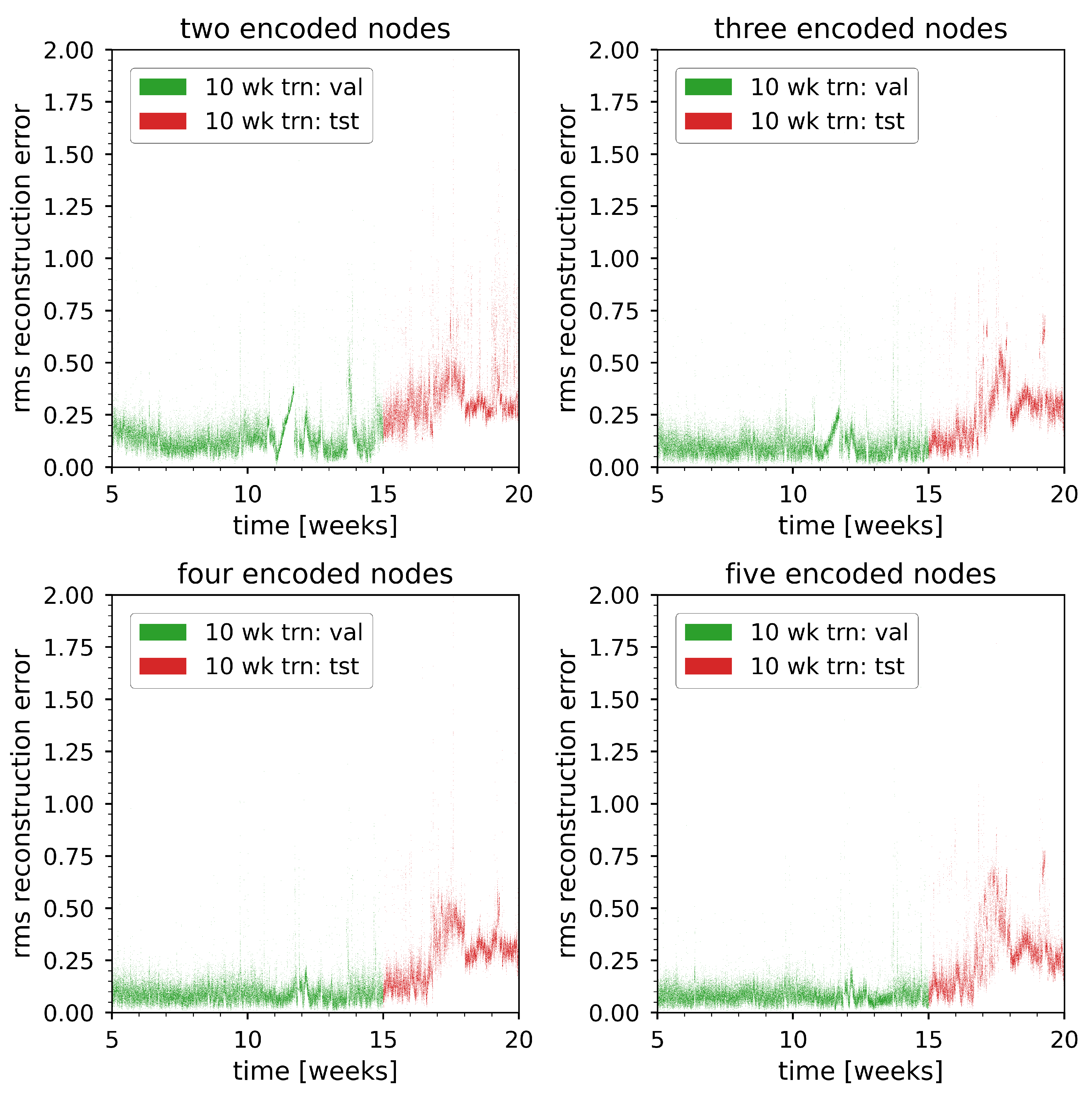
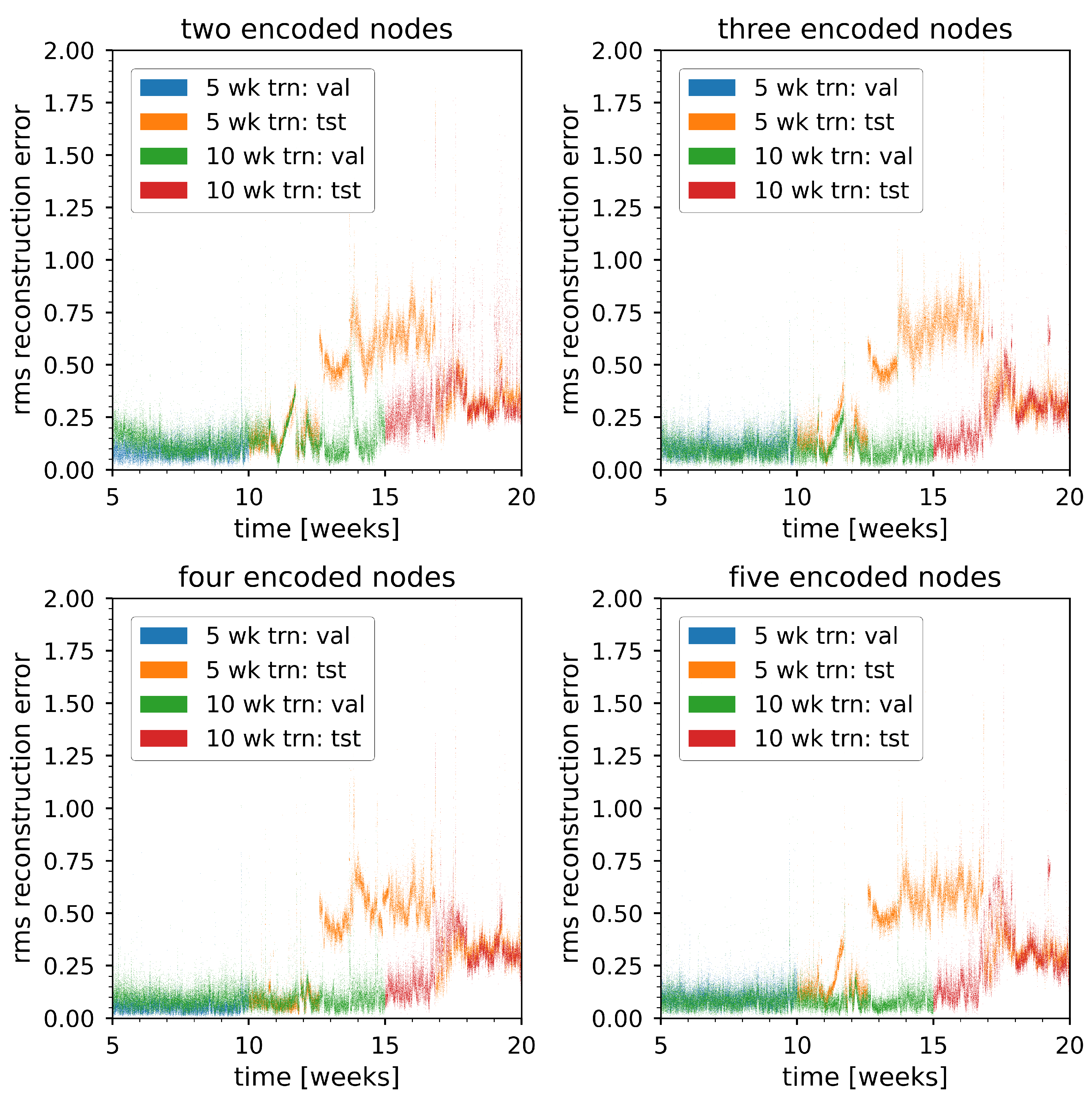
3.2. Reconstruction Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ML | machine learning |
| RF | radio frequency |
| Fermilab | Fermi National Laboratory |
| linac | linear accelerator |
| IoT | internet of things |
| LHC | Large Hadron Collider |
| J-PARC | Japan Proton Accelerator Research Complex |
| PCA | principal component analysis |
| DC | direct current |
| RFQ | radio-frequency quadrupole |
| DTL | drift tube linac |
| RMS | root mean square |
References
- Edelen, A.L.; Biedron, S.G.; Chase, B.E.; Edstrom, D.; Milton, S.V.; Stabile, P. Neural Networks for Modeling and Control of Particle Accelerators. IEEE Trans. Nucl. Sci. 2016, 63, 878–897. [Google Scholar] [CrossRef]
- Edelen, A.; Mayes, C.; Bowring, D.; Ratner, D.; Adelmann, A.; Ischebeck, R.; Snuverink, J.; Agapov, I.; Kammering, R.; Edelen, J.; et al. Opportunities in Machine Learning for Particle Accelerators. arXiv 2018, arXiv:1811.03172. [Google Scholar]
- Emma, C.; Edelen, A.; Hogan, M.J.; O’Shea, B.; White, G.; Yakimenko, V. Machine learning-based longitudinal phase space prediction of particle accelerators. Phys. Rev. Accel. Beams 2018, 21, 112802. [Google Scholar] [CrossRef]
- Edelen, A.L.; Biedron, S.G.; Milton, S.V.; Edelen, J.P. First Steps Toward Incorporating Image Based Diagnostics Into Particle Accelerator Control Systems Using Convolutional Neural Networks. In Proceedings of the 2016 North American Particle Accelerator Conference, Chicago, IL, USA, 9–14 October 2016. [Google Scholar]
- Edelen, A.L.; Edelen, J.P.; Biedron, S.G.; Milton, S.V.; van der Slot, P.J.M. Using Neural Network Control Policies For Rapid Switching Between Beam Parameters in a Free Electron Laser. In Proceedings of the 2017 Deep Learning for Physical Sciences workshop at the Neural Information Processing Systems Conference, Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Edelen, J.P.; Cook, N.M.; Brown, K.A.; Dyer, P.M. Optimal Control for Rapid Switching of Beam Energies for the ATR Line at BNL. Available online: http://accelconf.web.cern.ch/icalepcs2019/papers/tucpl07.pdf (accessed on 31 May 2021).
- Scheinker, A.; Edelen, A.; Bohler, D.; Emma, C.; Lutman, A. Demonstration of Model-Independent Control of the Longitudinal Phase Space of Electron Beams in the Linac-Coherent Light Source with Femtosecond Resolution. Phys. Rev. Lett. 2018, 121, 044801. [Google Scholar] [CrossRef] [PubMed]
- Edelen, A.; Neveu, N.; Frey, M.; Huber, Y.; Mayes, C.; Adelmann, A. Machine learning for orders of magnitude speedup in multiobjective optimization of particle accelerator systems. Phys. Rev. Accel. Beams 2020, 23, 044601. [Google Scholar] [CrossRef]
- Nawaz, A.S.; Pfeiffer, S.; Lichtenberg, G.; Schlarb, H. Self-organzied critical control for the European XFEL using black box parameter identification for the quench detection system. In Proceedings of the 2016 3rd Conference on Control and Fault-Tolerant Systems (SysTol), Barcelona, Spain, 7–9 September 2016; pp. 196–201. [Google Scholar] [CrossRef]
- Nawaz, A.; Pfeiffer, S.; Lichtenberg, G.; Rostalski, P. Anomaly Detection for the European XFEL using a Nonlinear Parity Space Method. IFAC-PapersOnLine 2018, 51, 1379–1386. [Google Scholar] [CrossRef]
- Nawaz, A.; Lichtenberg, G.; Pfeiffer, S.; Rostalski, P. Anomaly Detection for Cavity Signals—Results from the European XFEL. In Proceedings of the 9th International Particle Accelerator Conference, Vancouver, BC, Canada, 29 April–4 May 2018; p. WEPMF058. [Google Scholar] [CrossRef]
- Wielgosz, M.; Skoczea, A.; Mertik, M. Using LSTM recurrent neural networks for monitoring the LHC superconducting magnets. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2017, 867, 40–50. [Google Scholar] [CrossRef]
- Fol, E.; Coello de Portugal, J.M.; Tomas, R. Unsupervised machine learning for detection of faulty beam position monitors. In Proceedings of the 10th International Particle Accelerator Conference (IPAC2019), Melbourne, Australia, 19–24 May 2019; p. WEPGW081. [Google Scholar] [CrossRef]
- Dewitte, T.; Meert, W.; Van Wolputte, E.; Van Trappen, P. Anomaly Detection for CERN Beam Transfer Installations Using Machine Learning. In Proceedings of the 17th International Conference on Accelerator and Large Experimental Control Systems (ICALEPCS 2019), New York, NY, USA, 5–11 October 2019. [Google Scholar]
- Cauteruccio, F.; Cinelli, L.; Corradini, E.; Terracina, G.; Ursino, D.; Virgili, L.; Savaglio, C.; Liotta, A.; Fortino, G. A framework for anomaly detection and classification in Multiple IoT scenarios. Future Gener. Comput. Syst. 2021, 114, 322–335. [Google Scholar] [CrossRef]
- Cauteruccio, F.; Fortino, G.; Guerrieri, A.; Liotta, A.; Mocanu, D.C.; Perra, C.; Terracina, G.; Torres Vega, M. Short-long term anomaly detection in wireless sensor networks based on machine learning and multi-parameterized edit distance. Inf. Fusion 2019, 52, 13–30. [Google Scholar] [CrossRef]
- Soma, T.; Takagi, M.; Ishii, K.; Yoshioka, M. Predictive Detection and Diagnosis of Accelerator System Using System Invariant Analysis Technology (SIAT). In Proceedings of the 14th annual meeting of Particle Accelerator Society of Japan, Sapporo, Japan, 1–3 August 2017; p. 1427. [Google Scholar]
- Valentino, G.; Bruce, R.; Redaelli, S.; Rossi, R.; Theodoropoulos, P.; Jaster-Merz, S. Anomaly Detection for Beam Loss Maps in the Large Hadron Collider. J. Phys. Conf. Ser. 2017, 874, 012002. [Google Scholar] [CrossRef]
- Kramer, M.A. Nonlinear principal component analysis using autoassociative neural networks. AIChE J. 1991, 37, 233–243. [Google Scholar] [CrossRef]
- Webber, R.C. Tutorial on Beam Current Monitoring. In Proceedings of the 9th Workshop on Beam Instrumentation (BIW 2000), Cambridge, MA, USA, 8–11 May 2000. Technical Report, FERMILAB-Conf-00-119. [Google Scholar]
- Butler, T.A.; Allen, L.J.; Branlard, J.; Chase, B.; Paul, W.; Joireman, E.C.; Kucera, M.; Tupikov, V.; Varghese, P. New LLRF System for Fermilab 201.25 MHz linac. In Proceedings of the LINAC08, Victoria, BC, Canada, 29 September–3 October 2008; p. THP114. [Google Scholar]
- Chollet, F. Keras Homepage. 2015. Available online: https://keras.io (accessed on 27 May 2021).
- Doolittle, L. Low-level RF control system design and architecture. In Proceedings of the Asian Particle Accelerator Conference, Indore, India, 29 January–2 February 2007. [Google Scholar]
- Edelen, J.P.; Chase, B.E.; Cullerton, E.; Einstein-Curtis, J.; Holzbauer, J.; Klepec, D.; Pischalnikov, Y.; Schappert, W.; Varghese, P.; Joshi, G.; et al. Low Level RF Control for the PIP-II Accelerator. arXiv 2018, arXiv:1803.08211. [Google Scholar]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Edelen, J.P.; Hall, C.C. Autoencoder Based Analysis of RF Parameters in the Fermilab Low Energy Linac. Information 2021, 12, 238. https://doi.org/10.3390/info12060238
Edelen JP, Hall CC. Autoencoder Based Analysis of RF Parameters in the Fermilab Low Energy Linac. Information. 2021; 12(6):238. https://doi.org/10.3390/info12060238
Chicago/Turabian StyleEdelen, Jonathan P., and Christopher C. Hall. 2021. "Autoencoder Based Analysis of RF Parameters in the Fermilab Low Energy Linac" Information 12, no. 6: 238. https://doi.org/10.3390/info12060238
APA StyleEdelen, J. P., & Hall, C. C. (2021). Autoencoder Based Analysis of RF Parameters in the Fermilab Low Energy Linac. Information, 12(6), 238. https://doi.org/10.3390/info12060238