
Predictive Maintenance for Switch Machine Based on Digital Twins



Abstract
:1. Introduction
2. Framework and Method
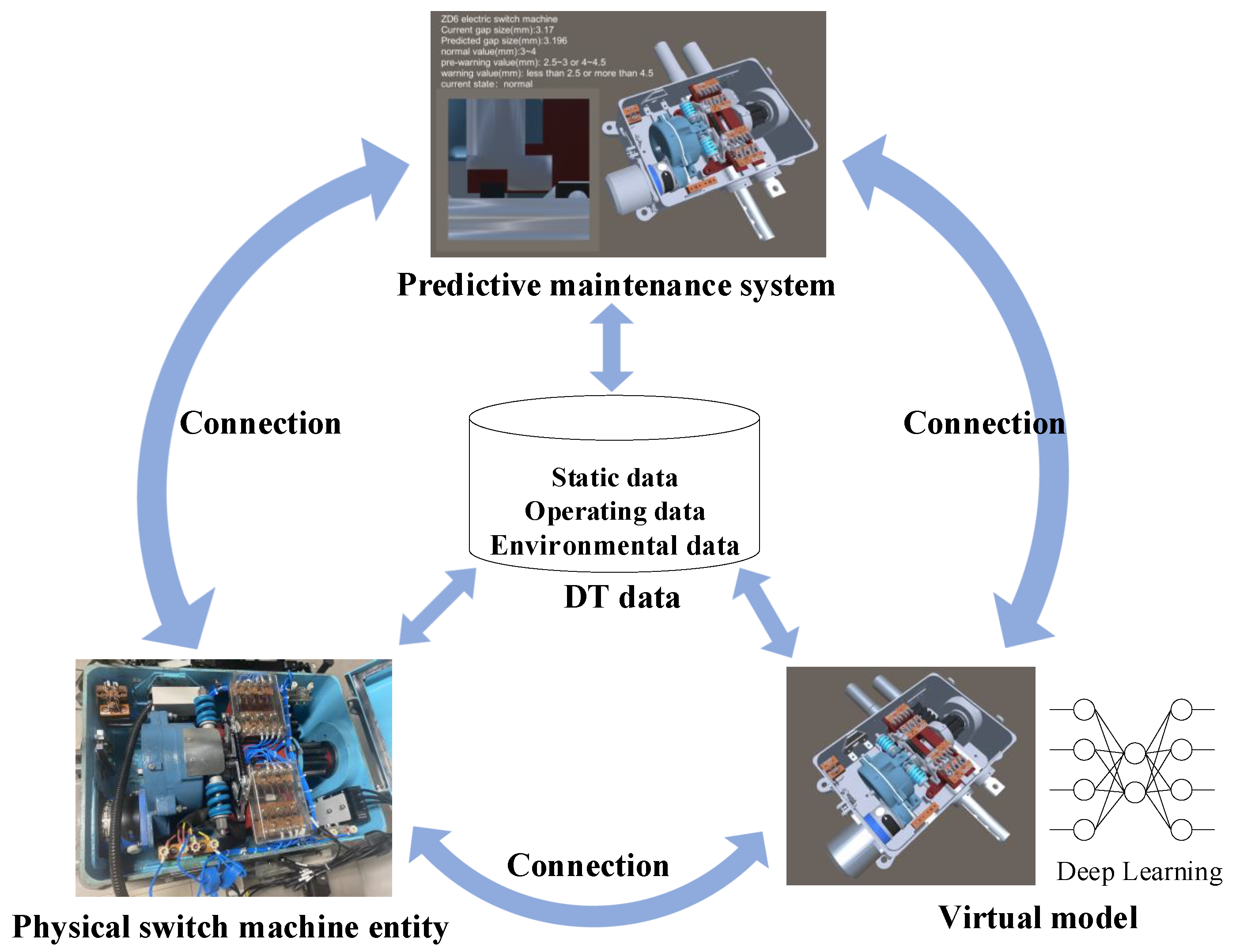
2.1. Overview
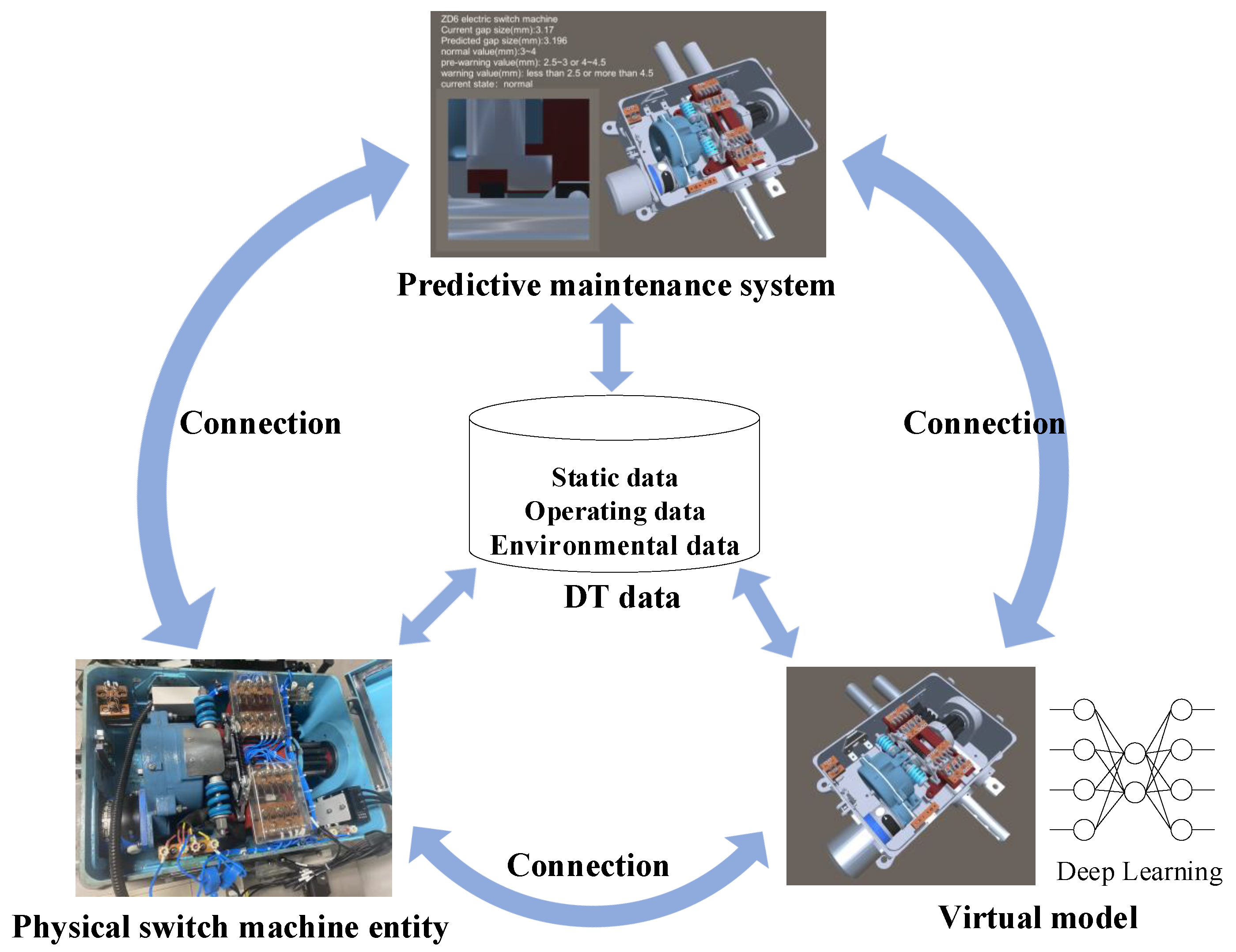
- (1)
- PE is a physical device of the switch machine, which provides parameters and data for DD.
- (2)
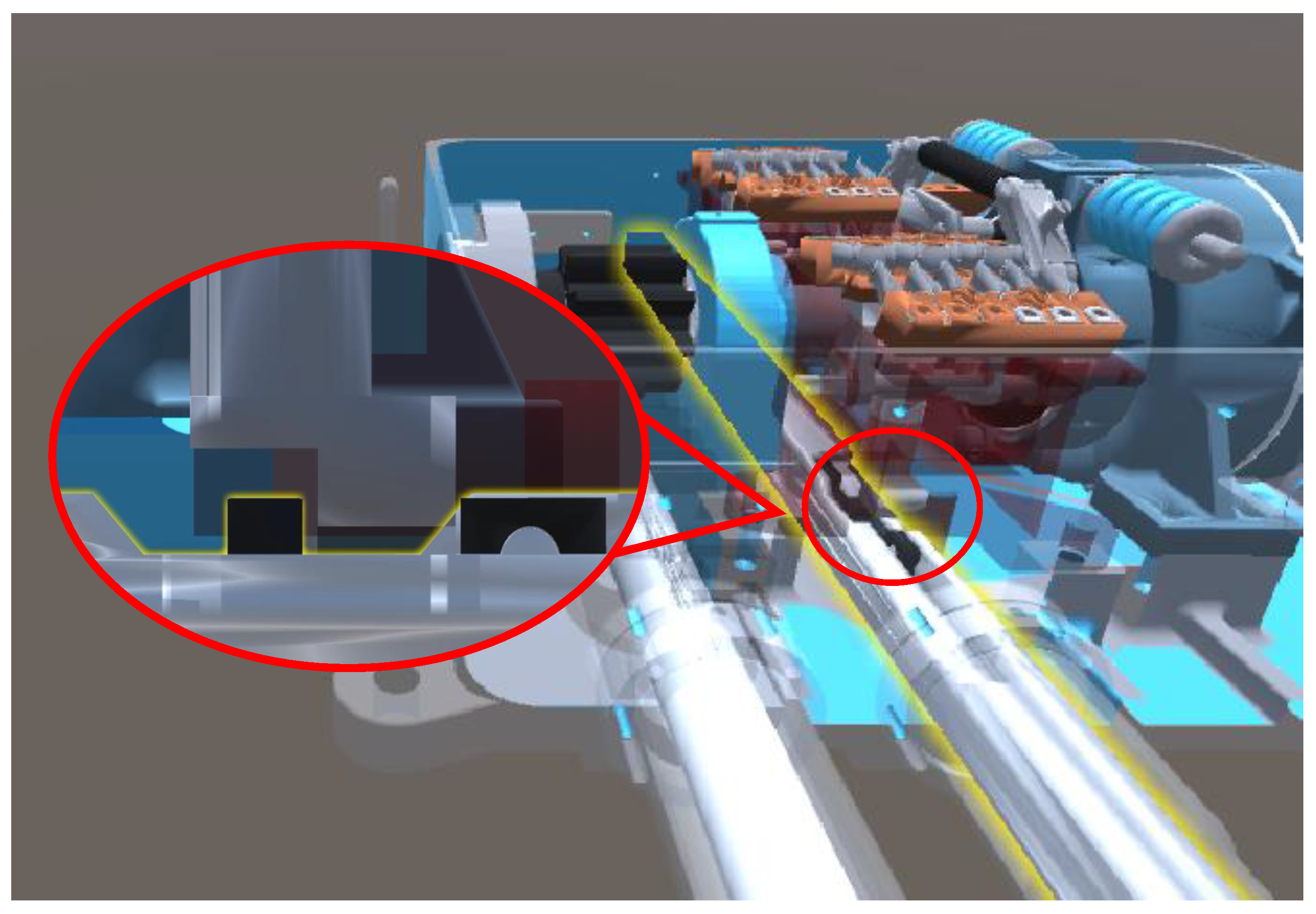
- VE is the core of the DT. It concludes visualization model and rule model, which is the key to realizing the switch machine’s visualization and prediction.
- (3)
- DD contains equipment static data, environmental data and real-time operating data collected by the Internet of Things. DD takes the change of data processing and data cleaning.
- (4)
- CN transmits information through the data communication mechanism.
- (5)
- Ss can visually present the prediction results to the maintenance personnel and provide solutions to the problem.
2.2. Behavior Model Construction
2.3. Rule Model Construction
2.3.1. LSTM Model
2.3.2. ARIMA Model
2.3.3. Entropy Weight Method
3. Experiment
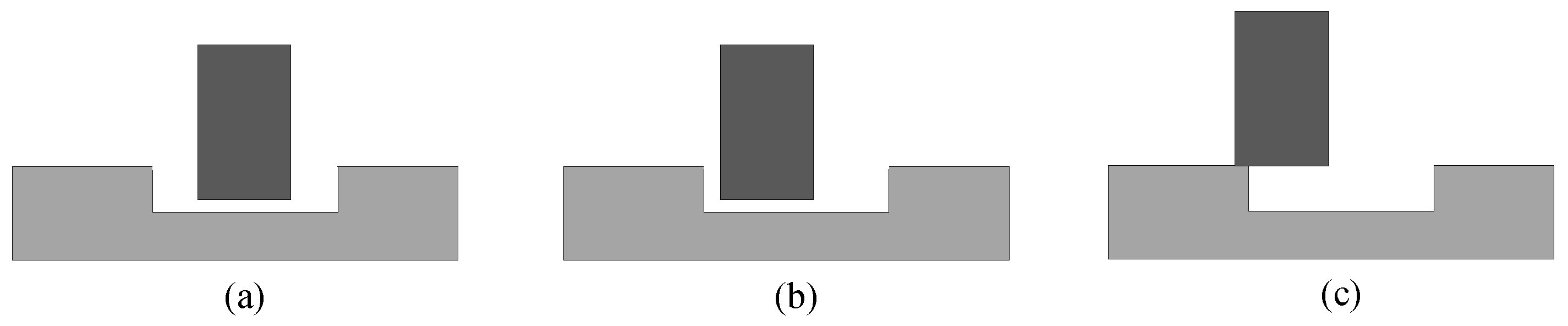
3.1. Principle of Switch Machine Gap
3.2. The Construction of Behavior Model
3.3. Combination Prediction Model
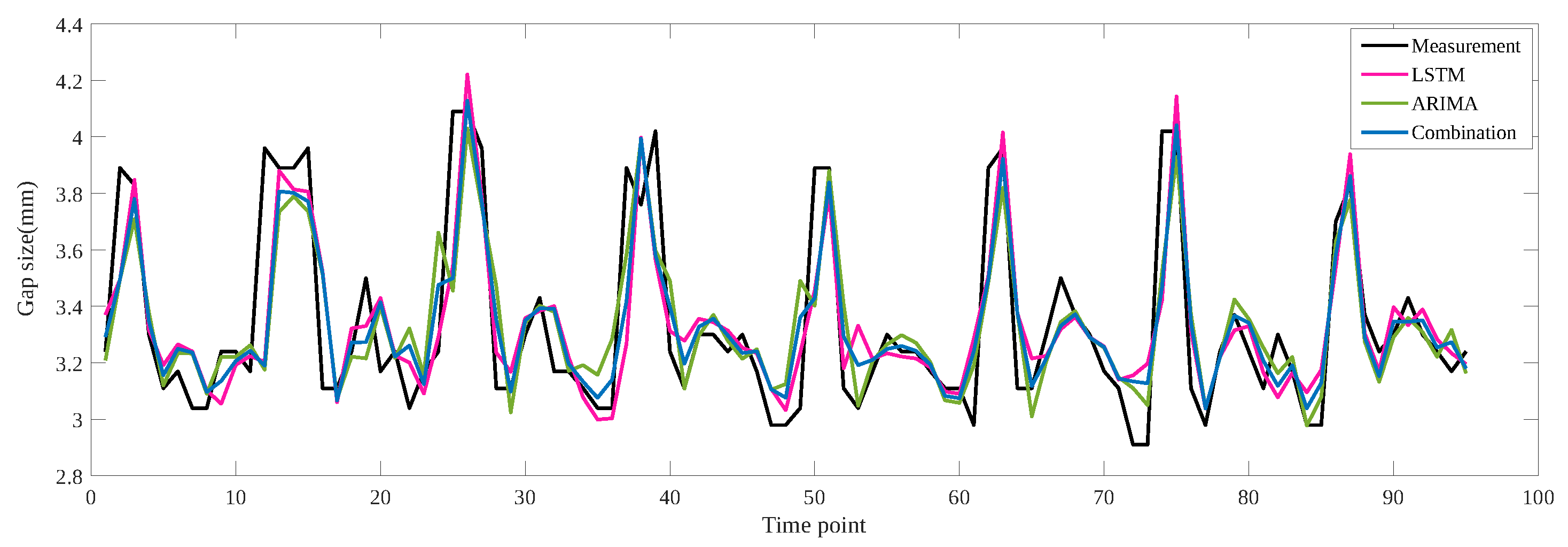
3.4. Results and Analysis
3.5. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DT | Digital Twins |
| PM | predictive maintenance |
| PHM | Prognostic and Health Management |
| LSTM | Long short-term memory |
| ARMA | Autoregressive moving average |
| SVR | support vector regression |
| ARIMA | Autoregressive Integrated Moving Average |
References
- Cao, Y.; Wen, J.; Ma, L. Tracking and collision avoidance of virtual coupling train control system. Future Gener. Comput. Syst. 2021, 120, 76–90. [Google Scholar] [CrossRef]
- Cao, Y.; Zhang, Y.; Wen, T.; Li, P. Research on dynamic nonlinear input prediction of fault diagnosis based on fractional differential operator equation in high-speed train control system. Chaos 2019, 29, 1. [Google Scholar] [CrossRef]
- Cao, Y.; Wang, Z.; Liu, F.; Li, P.; Xie, G. Bio-inspired speed curve optimization and sliding mode tracking control for subway trains. IEEE Trans. Ehicular Technol. 2019, 68, 6331–6342. [Google Scholar] [CrossRef]
- Zhong, Z.; Tang, T.; Wang, F. Research on fault feature extraction and diagnosis of railway switches based on PLSA and SVM. J. China Railw. Soc. 2018, 40, 80–87. [Google Scholar]
- Cao, Y.; Li, P.; Zhang, Y. Parallel processing algorithm for railway signal fault diagnosis data based on cloud computing. Future Gener. Comput. Syst. 2018, 88, 279–283. [Google Scholar] [CrossRef]
- Sun, Y.; Cao, Y.; Xie, G.; Wen, T. Sound based fault diagnosis for RPMs based on multi-scale fractional permutation entropy and two-scale algorithm. IEEE Trans. Veh. Technol. 2021, 70, 11184–11192. [Google Scholar] [CrossRef]
- Ardakani, H.D.; Lucas, C.; Siegel, D.; Chang, S.; Dersin, P.; Bonnet, B.; Lee, J. PHM for railway system—A case study on the health assessment of the point machines. In Proceedings of the 2012 IEEE Conference on Prognostics and Health Management, Beijing, China, 23–25 May 2012; pp. 1–5. [Google Scholar]
- Sun, Y.; Cao, Y.; Ma, L. A fault diagnosis method for train plug doors via sound signals. IEEE Intell. Transp. Syst. Mag. 2021, 13, 107–117. [Google Scholar] [CrossRef]
- Garrido-Hidalgo, C.; Hortelano, D.; Roda-Sanchez, L.; Olivares, T.; Ruiz, M.C.; Lopez, V. IoT heterogeneous mesh network deployment for human-in-the-loop challenges towards a social and sustainable industry 4.0. IEEE Access 2018, 6, 28417–28437. [Google Scholar] [CrossRef]
- Guclu, A.; Yılboga, H.; Eker, O.F.; Camci, F.; Jennions, I. Prognostics with Autoregressive Moving Average for Railway Turnouts. Annual Conference of the PHM Society. IEEE Trans. Instrum. Meas. 2010, 2, 1901. [Google Scholar]
- Liu, Z. Prediction research of point switch loophole by of polynomial fitting. Heilongjiang Sci. 2020, 11, 9–11. [Google Scholar]
- Yang, F.; Xu, Q.; Fan, X.; Ye, W. Prediction of landslide displacement time series based on support vector regression machine with artificial bee colony algorithm. J. Eng. Geol. 2019, 27, 880–889. [Google Scholar]
- Hsu, L. Applying the Grey prediction model to the global integrated circuit industry. Technol. Forecast. Soc. Chang. 2003, 70, 563–574. [Google Scholar] [CrossRef]
- Kong, W.; Dong, Z.; Jia, Y.; Hill, D.; Xu, Y.; Zhang, Y. Short-Term Residential Load Forecasting Based on LSTM Recurrent Neural Network. IEEE Trans. Smart Grid 2019, 10, 841–851. [Google Scholar] [CrossRef]
- Li, Q.; Pei, H.; Song, H.; Zhu, H. Prediction of Slope Displacement Based on PSO-SVR-NGM Combined with Entropy Weight Method. 2021. Available online: http://150.138.141.24/kcms/detail/detail.aspx?filename=GCDZ2021062100C&dbcode=CJFD&dbname=CAPJ2021 (accessed on 15 October 2021).
- Nikolaos, N.; Kosmas, A.; Evangelos, X.; George, C. The digital twin implementation for linking the virtual representation of human-based production tasks to their physical counterpart in the factory-floor. Int. J. Comput. Integr. Manuf. 2019, 32, 1–12. [Google Scholar] [CrossRef]
- Zhuang, C.; Liu, J.; Xiong, H.; Ding, X.; Liu, S.; Weng, G. Connotation, architecture and trends of product digital twin. Comput. Integr. Manuf. Syst. 2017, 23, 753–768. [Google Scholar]
- Napoleone, A.; Macchi, M.; Pozzetti, A. A review on the characteristics of cyber- physical systems for the future smart factories. J. Manuf. Syst. 2020, 54, 305–335. [Google Scholar] [CrossRef]
- Qiao, Q.; Wang, J.; Ye, L.; Gao, R.X. Digital Twin for Machining Tool Condition Prediction. Procedia CIRP 2019, 81, 1388–1393. [Google Scholar] [CrossRef]
- Tao, F.; Zhang, H.; Liu, A.; Nee, A. Digital twin in industry: State-of-the-art. IEEE Trans. Ind. Inform. 2019, 15, 2405–2415. [Google Scholar] [CrossRef]
- Tuegel, E.J.; Ingraffea, A.R.; Eason, T.G. Reengineering Aircraft Structural Life Prediction Using a Digital Twin. Int. J. Aerosp. Eng. 2011, 2011, 154798. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Mahadevan, S.; You, L.; Choze, S.; Wang, L. Dynamic bayesian network for aircraft wing health monitoring digital twin. AIAA J. 2017, 55, 930–941. [Google Scholar] [CrossRef]
- Luo, W.; Hu, T.; Ye, Y.; Zhang, C.; Wei, Y. A hybrid predictive maintenance approach for CNC machine tool driven by Digital Twin. Robot.-Comput.-Integr. Manuf. 2020, 65, 101974. [Google Scholar] [CrossRef]
- Scheuermann, C.; Binderberger, T.; Frankenberg, N.; Werner, A. Digital Twin: A Machine Learning Approach to Predict Individual Stress Levels in Extreme Environments. In Adjunct Proceedings of the 2020 ACM International Joint Conference on Pervasive and Ubiquitous Computing and Proceedings of the 2020 ACM International Symposium on Wearable Computers; Association for Computing Machinery: New York, NY, USA, 2020; Volume 8, pp. 657–664. [Google Scholar]
- Ding, H.; Yang, L.; Yang, Y.; Wang, Y. Health Prediction of Shearers Driven by Digital Twin and Deep Learning. China Mech. Eng. 2020, 31, 815–823. [Google Scholar]
- Tao, F.; Zhang, M.; Liu, Y.; Nee, A.Y.C. Digital twin driven prognostics and health management for complex equipment. CIRP Ann. 2018, 67, 169–172. [Google Scholar] [CrossRef]
- Kaveh, K.; Kaveh, H.; Bui, M.D.; Rutschmann, P. Long short-term memory for predicting daily suspended sediment concentration. Eng. Comput. 2021, 37, 2013–2027. [Google Scholar] [CrossRef]
- Liu, Z.; Meng, X.; Wei, H. A Regularized LSTM Method for Predicting Remaining Useful Life of Rolling Bearings. Int. J. Autom. Comput. 2021, 18, 581–593. [Google Scholar] [CrossRef]
- Contreras, J.; Espinola, R.; Nogales, F.J.; Conejo, A.J. ARIMA models to predict next-day electricity prices. IEEE Trans. Power Syst. 2003, 18, 1014–1020. [Google Scholar] [CrossRef]
- Liu, L.; Luan, R.; Yin, F.; Zhu, X.; Lu, Q. Predicting the incidence of hand, foot and mouth disease in Sichuan province, China using the ARIMA model. Epidemiol. Infect. 2016, 144, 144–151. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Liu, H.; Zhang, B.; Chen, S. A Combination method for photovoltaic power forecasting based on entropy weight method. Acta Energ. Solaris Sin. 2014, 35, 744–749. [Google Scholar]
- Yang, L.; Liu, J.; Chen, L. Detection rod gap jamming fault at second traction point of S700K switch machine for urban rail transit. Railw. Signal Commun. Eng. 2021, 18, 67–71, 85. [Google Scholar]
- Kim, T.; Cho, S. Predicting residential energy consumption using CNN-LSTM neural networks. Energy 2019, 182, 72–81. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Model | Advantage | Disadvantage |
|---|---|---|---|
| Guclu | ARMA | The calculation is simple. | It is difficult to capture nonlinear information. |
| Liu | Polynomials | The calculation is simple. | It is difficult to capture nonlinear information and only suit for small simple. |
| Yang | SVR | It could capture nonlinear information. | The prediction accuracy is relatively low. |
| Hsu | Grey forecasting | The prediction accuracy is relatively high for short term and calculation is simple. | It is not suit for long-term predictions. |
| Kong | LSTM | It could capture nonlinear information and suit for long-term predictions. | It is relatively simple to fit more information. |
| Date | (LSTM) | (ARIMA) |
|---|---|---|
| 3 November | 0.5117 | 0.4883 |
| 4 November | 0.5013 | 0.4987 |
| 5 November | 0.5127 | 0.4873 |
| 6 November | 0.5219 | 0.4781 |
| 7 November | 0.5069 | 0.4931 |
| 8 November | 0.5229 | 0.4771 |
| 9 November | 0.5238 | 0.4762 |
| 10 November | 0.5233 | 0.4767 |
| Method | RMSE (mm) | MAE (mm) | MAPE |
|---|---|---|---|
| LSTM model | 0.1998 | 0.1370 | 3.9855% |
| ARIMA model | 0.2067 | 0.1418 | 4.1420% |
| Combination model | 0.1955 | 0.1318 | 3.8435% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Sun, Y.; Cao, Y.; Hu, X. Predictive Maintenance for Switch Machine Based on Digital Twins. Information 2021, 12, 485. https://doi.org/10.3390/info12110485
Yang J, Sun Y, Cao Y, Hu X. Predictive Maintenance for Switch Machine Based on Digital Twins. Information. 2021; 12(11):485. https://doi.org/10.3390/info12110485
Chicago/Turabian StyleYang, Jia, Yongkui Sun, Yuan Cao, and Xiaoxi Hu. 2021. "Predictive Maintenance for Switch Machine Based on Digital Twins" Information 12, no. 11: 485. https://doi.org/10.3390/info12110485
APA StyleYang, J., Sun, Y., Cao, Y., & Hu, X. (2021). Predictive Maintenance for Switch Machine Based on Digital Twins. Information, 12(11), 485. https://doi.org/10.3390/info12110485