Fuzzy-Logic-Based, Obstacle Information-Aided Multiple-Model Target Tracking

Abstract
:1. Introduction
2. Outline of the SD-IMM Algorithm
2.1. Stochastic Model
2.2. Improvement in the SD-IMM Algorithm
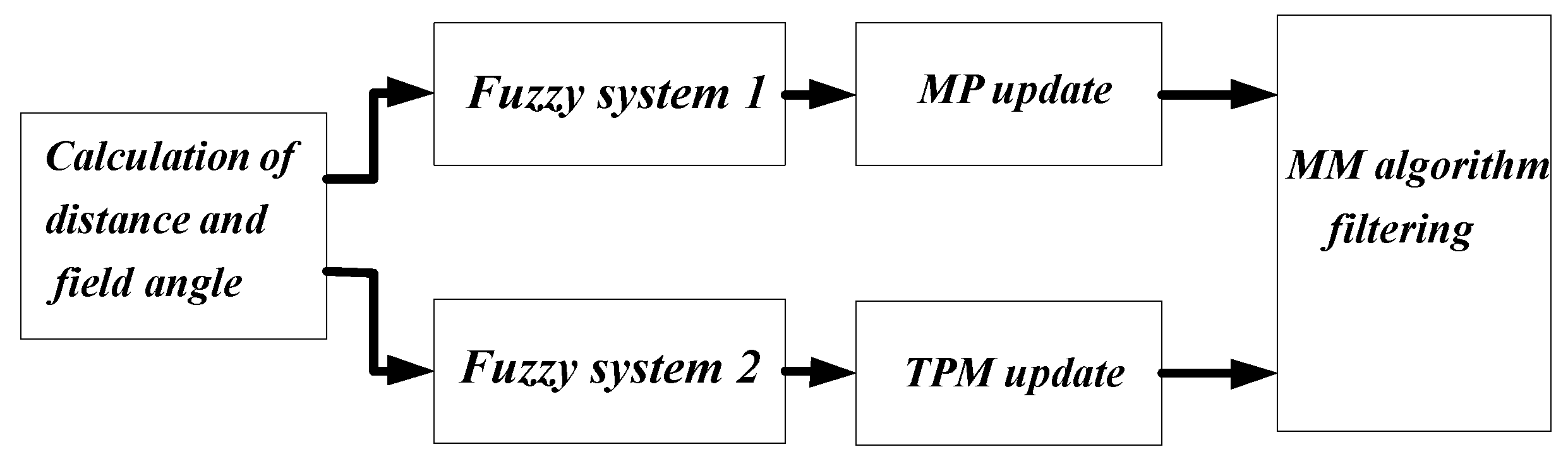
3. FOIA-MM Algorithm
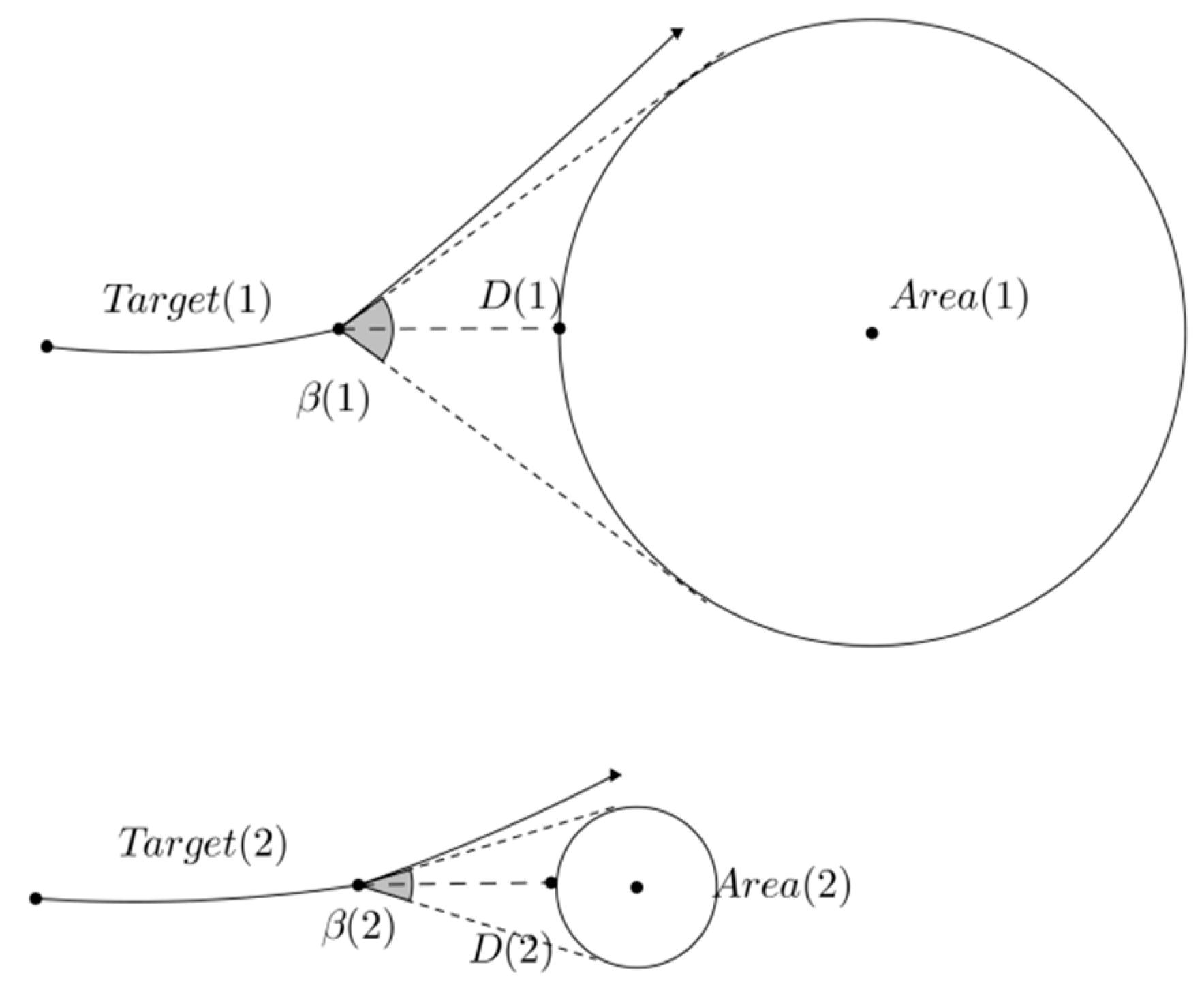
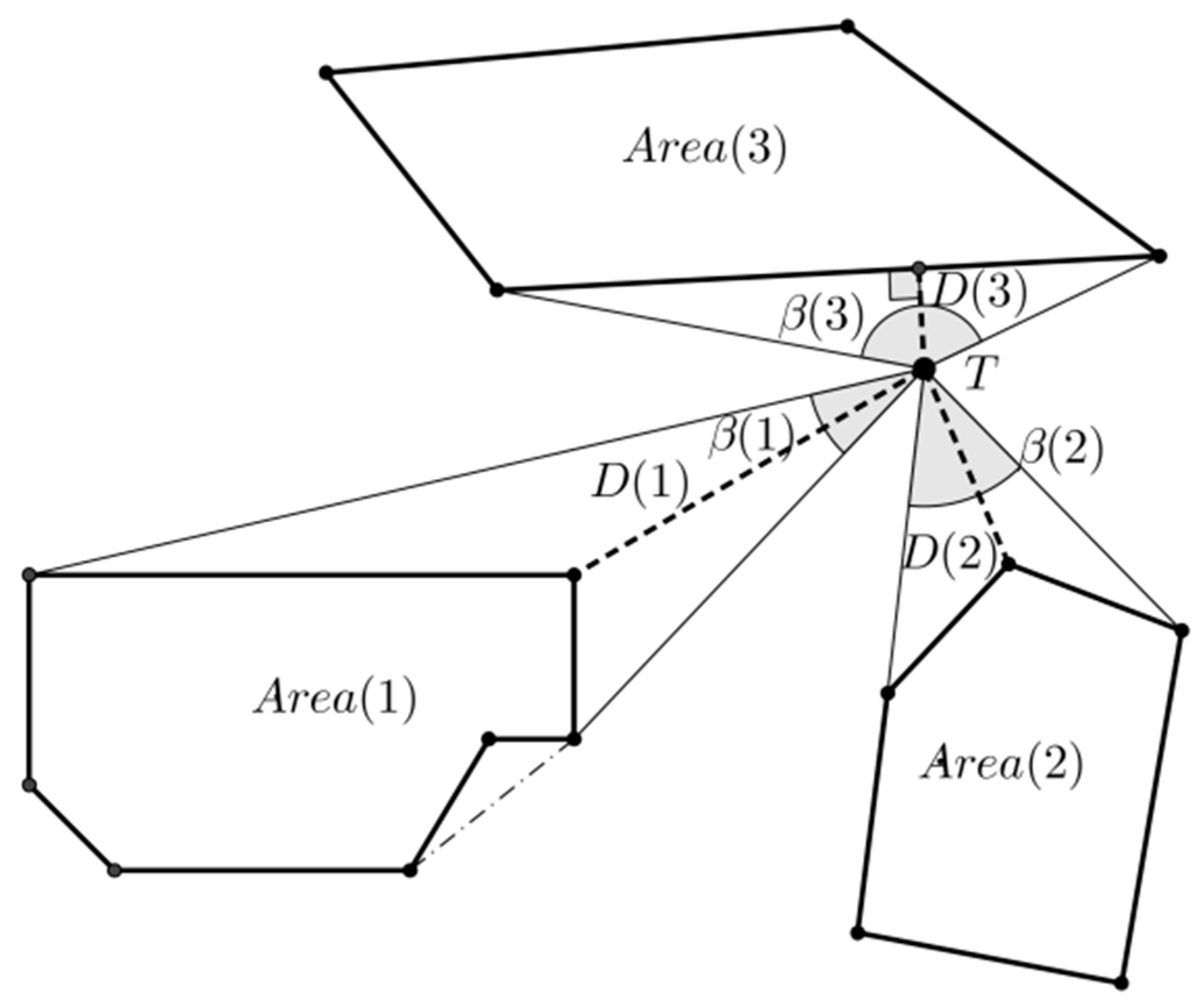
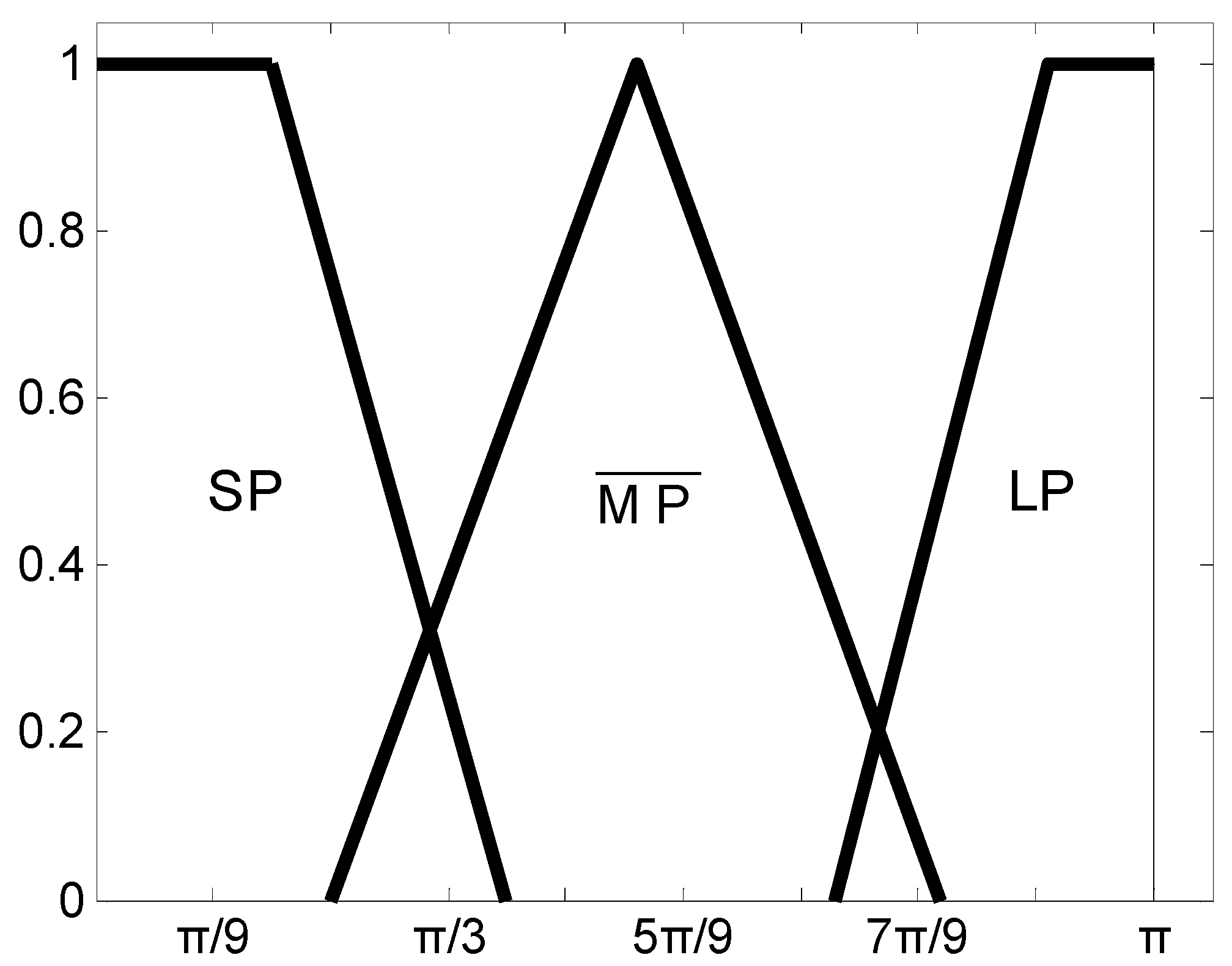
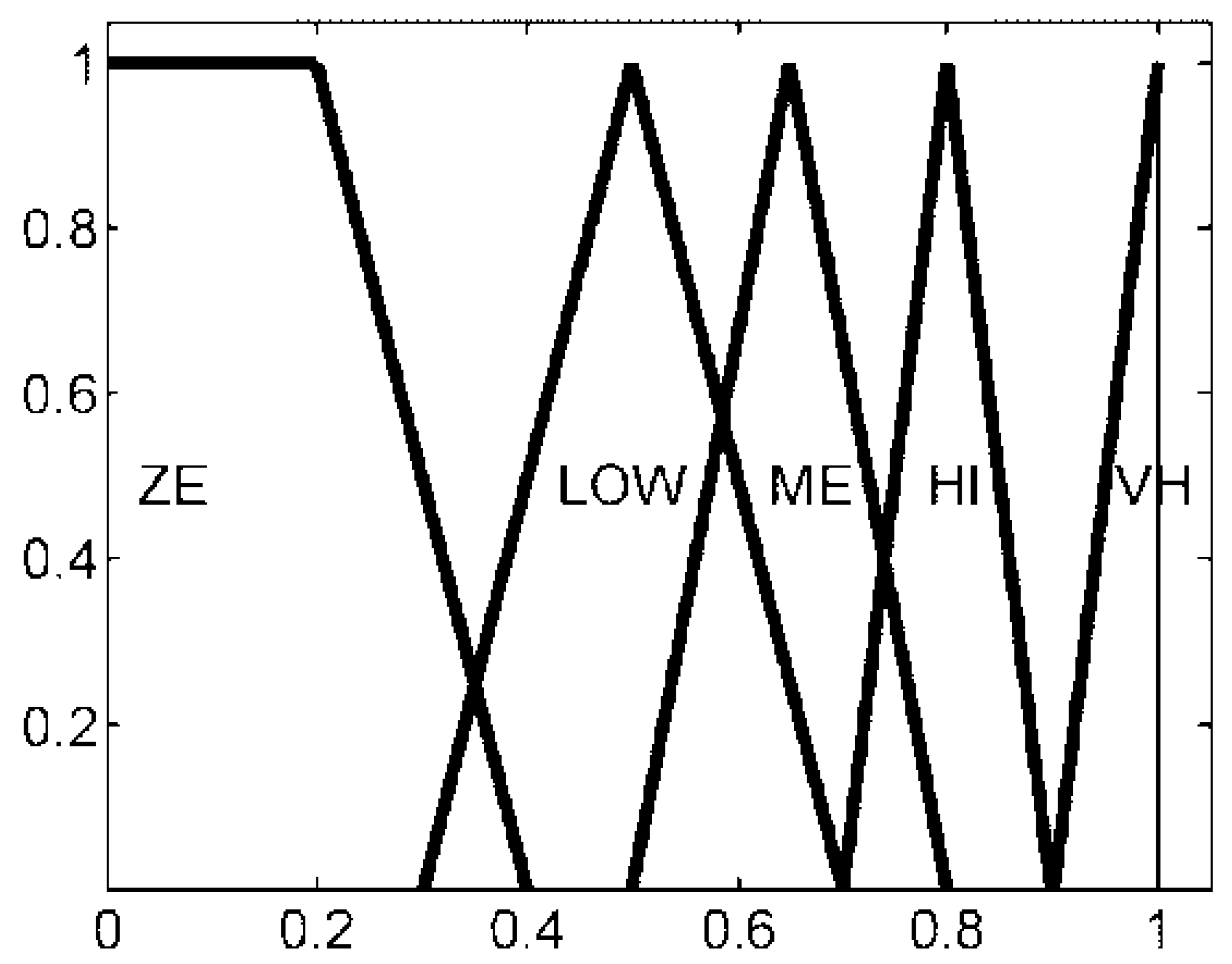
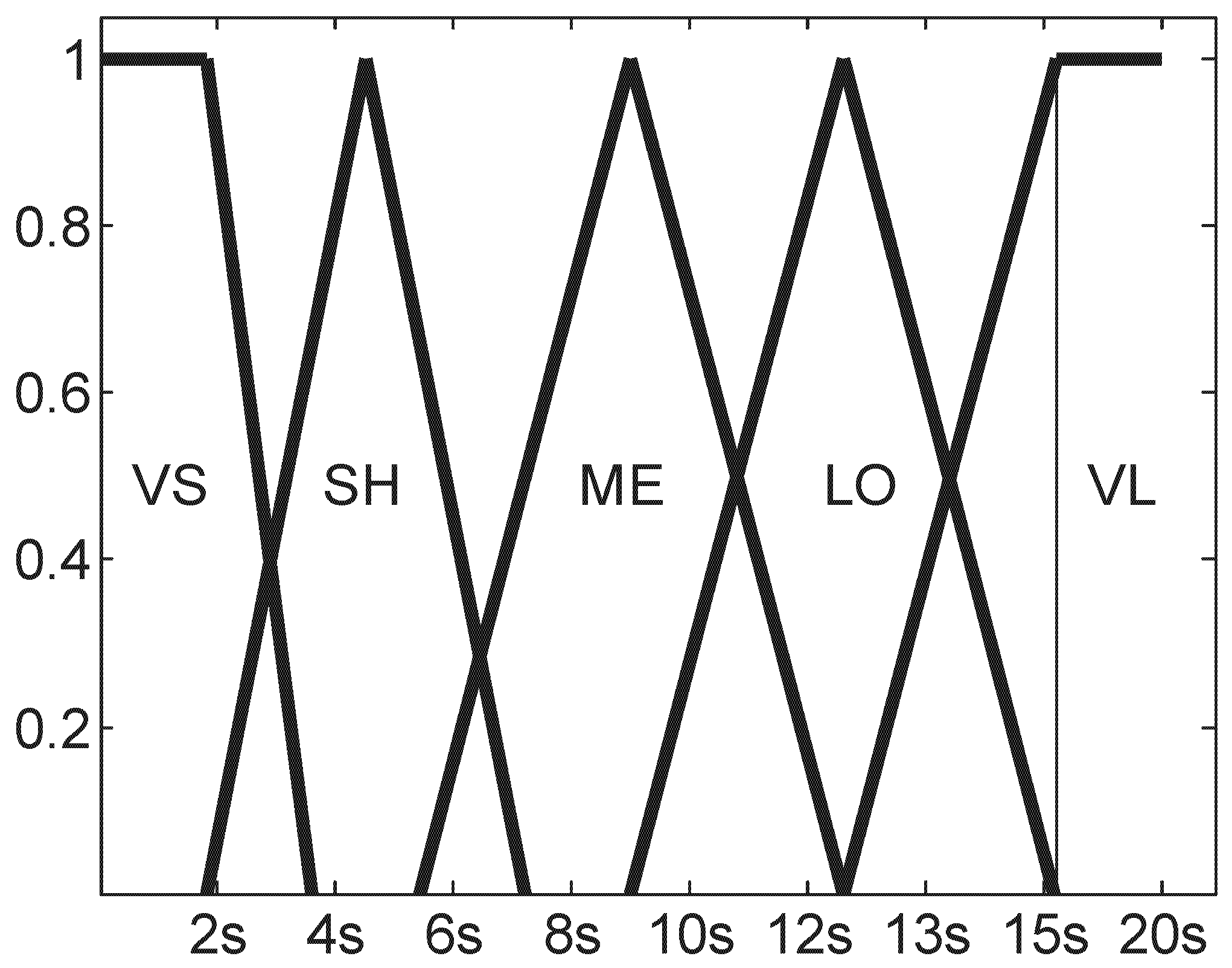
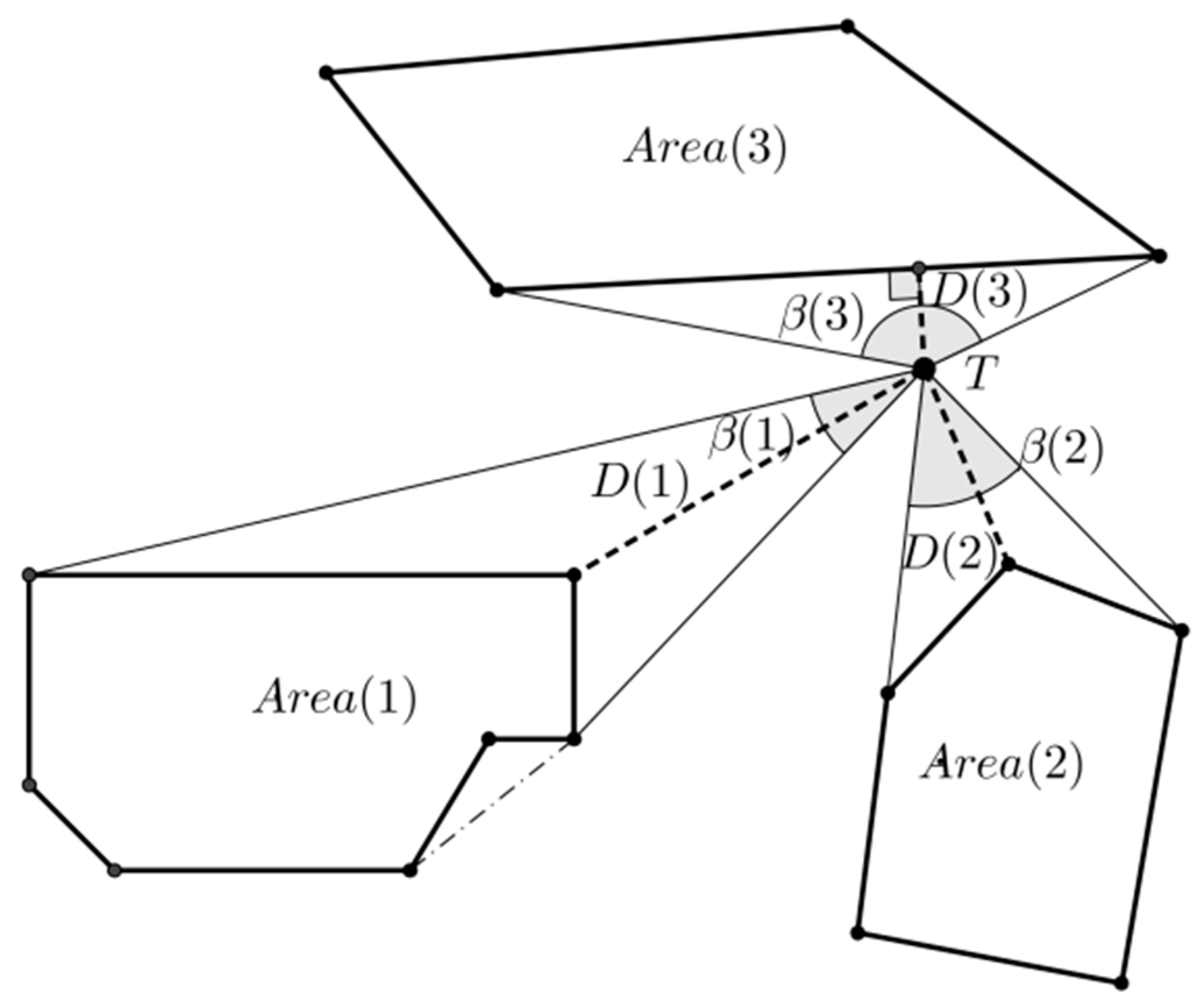
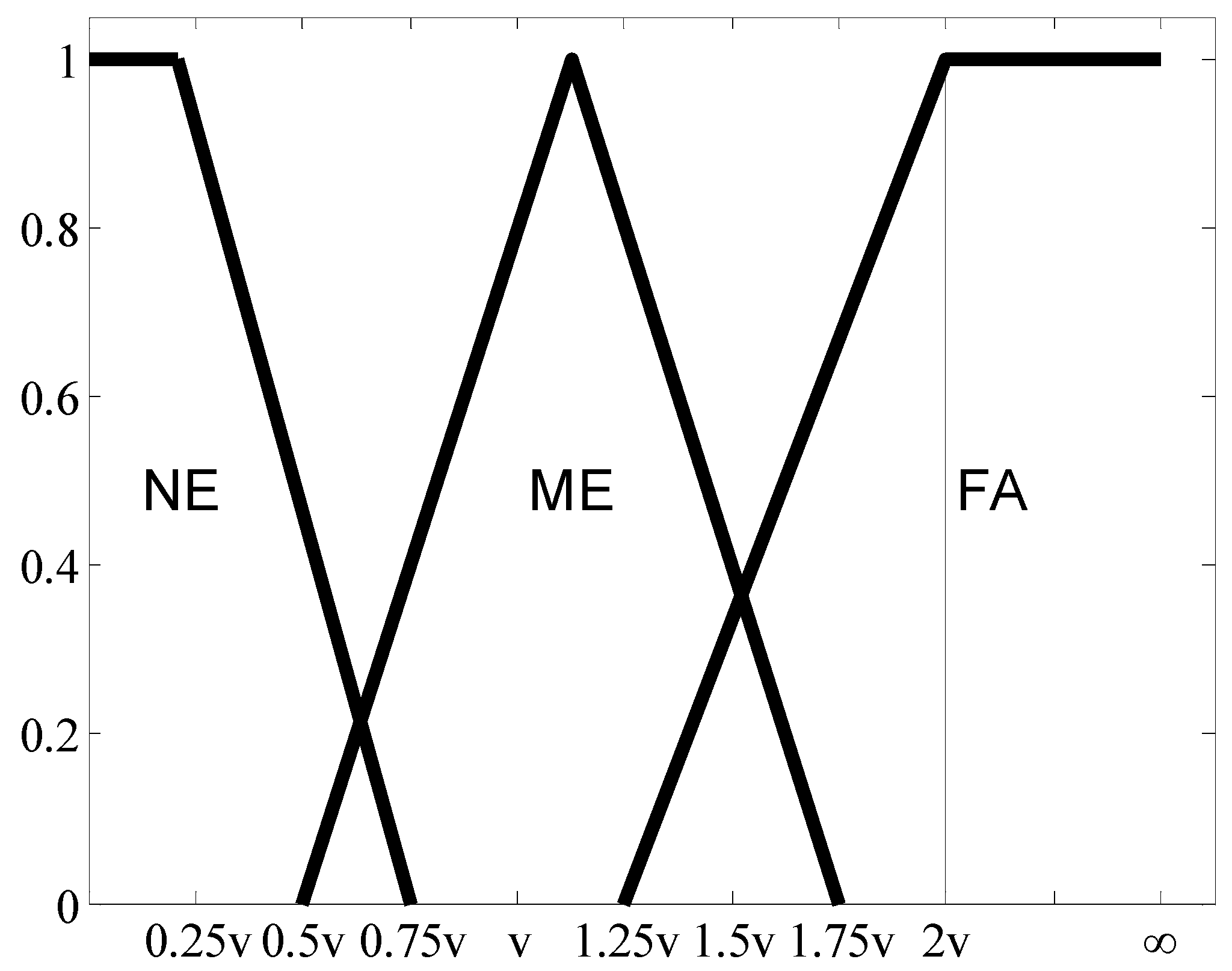
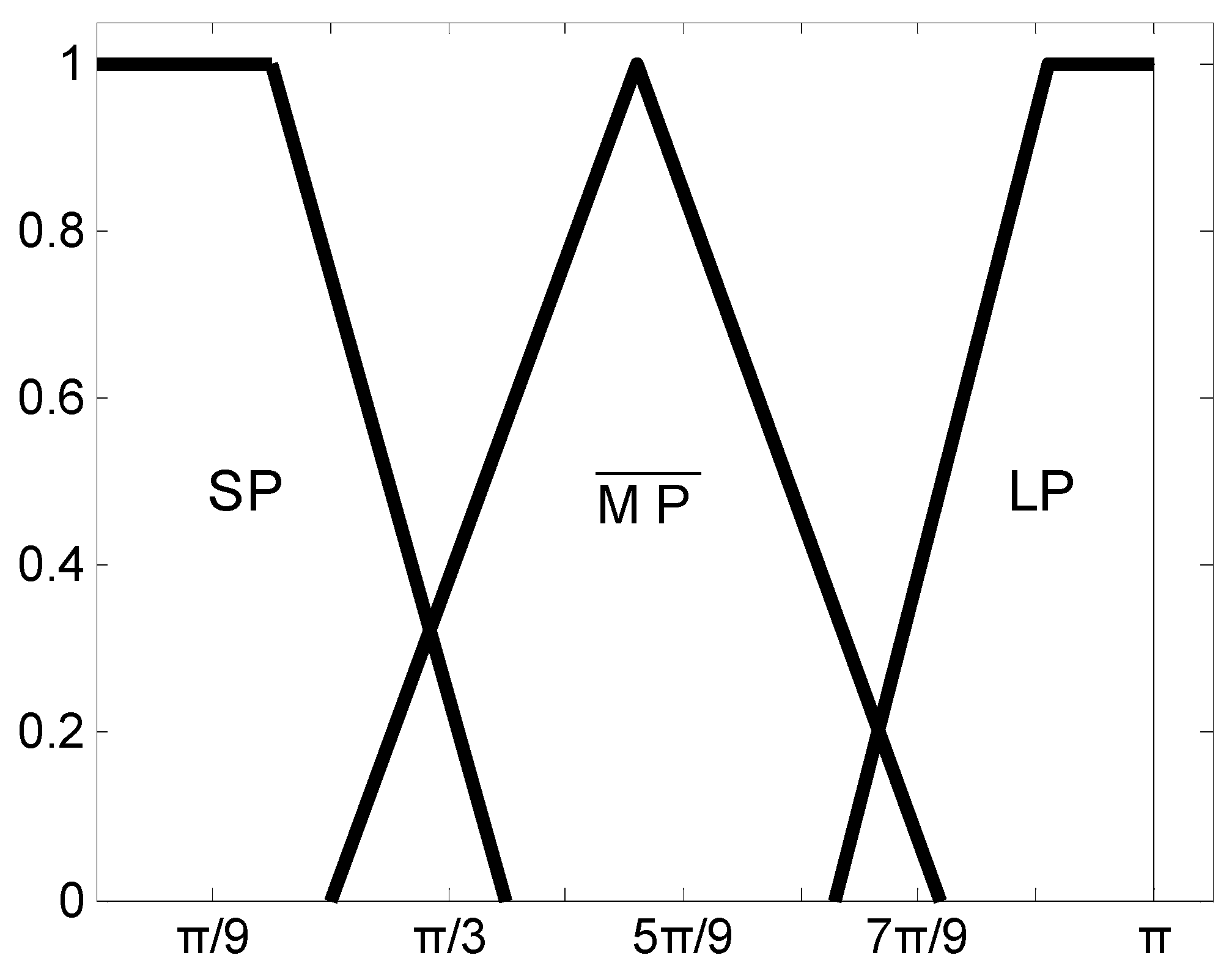
3.1. Obstacle Information Descriptions
3.2. MP Update
3.3. TPM Update
3.4. The Iterative Process of the FOIA-MM Algorithm
4. Experimental Results and Analysis
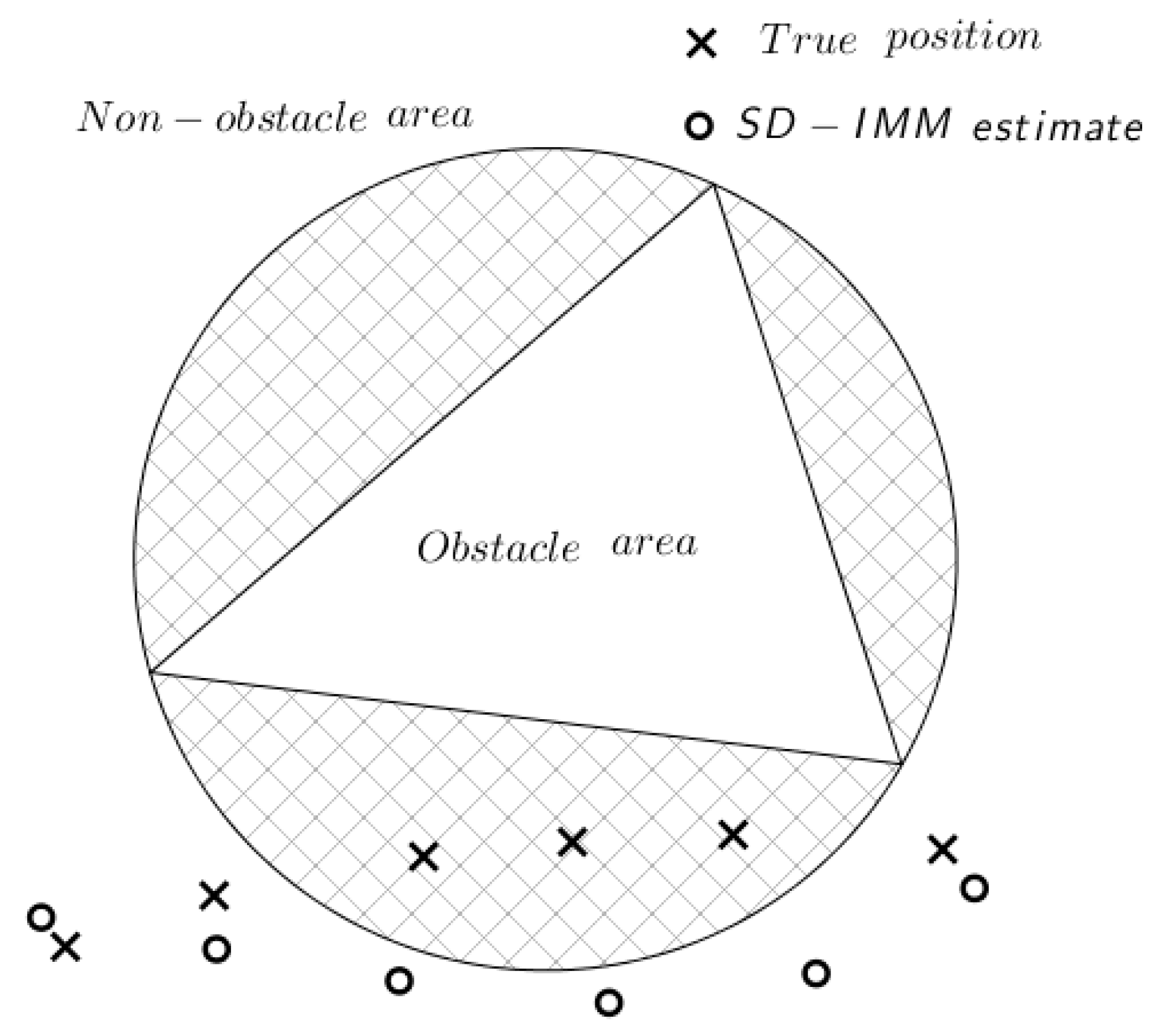
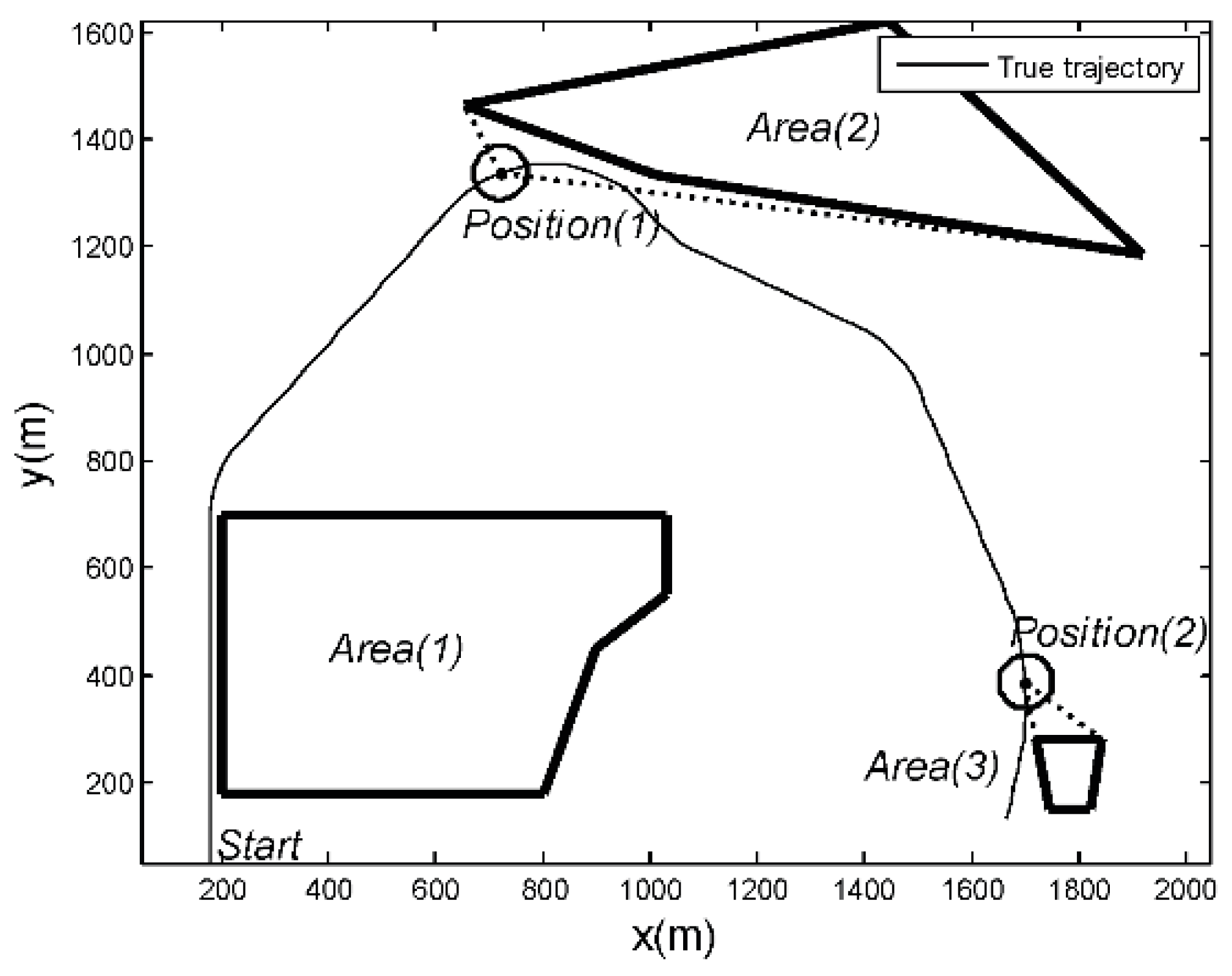
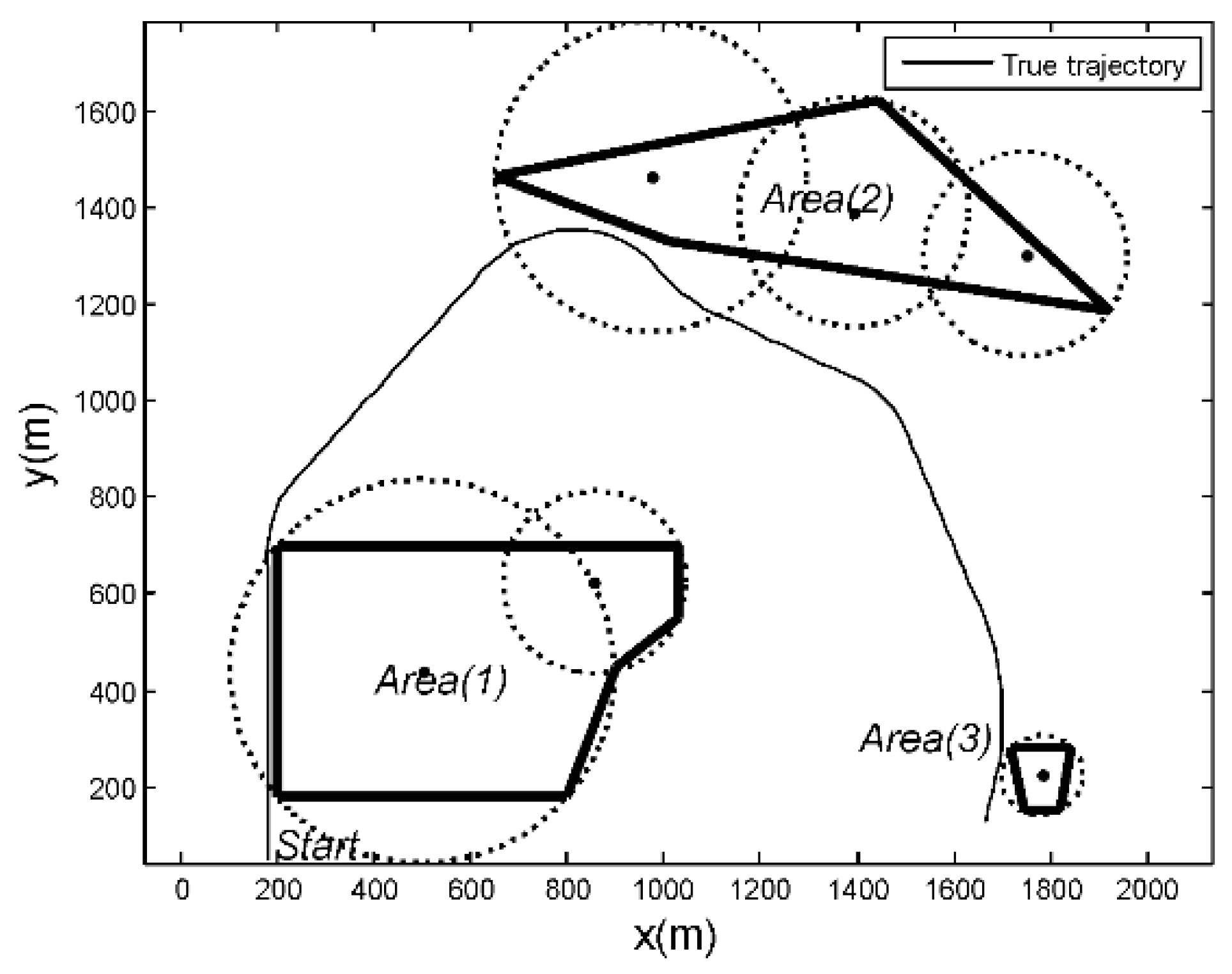
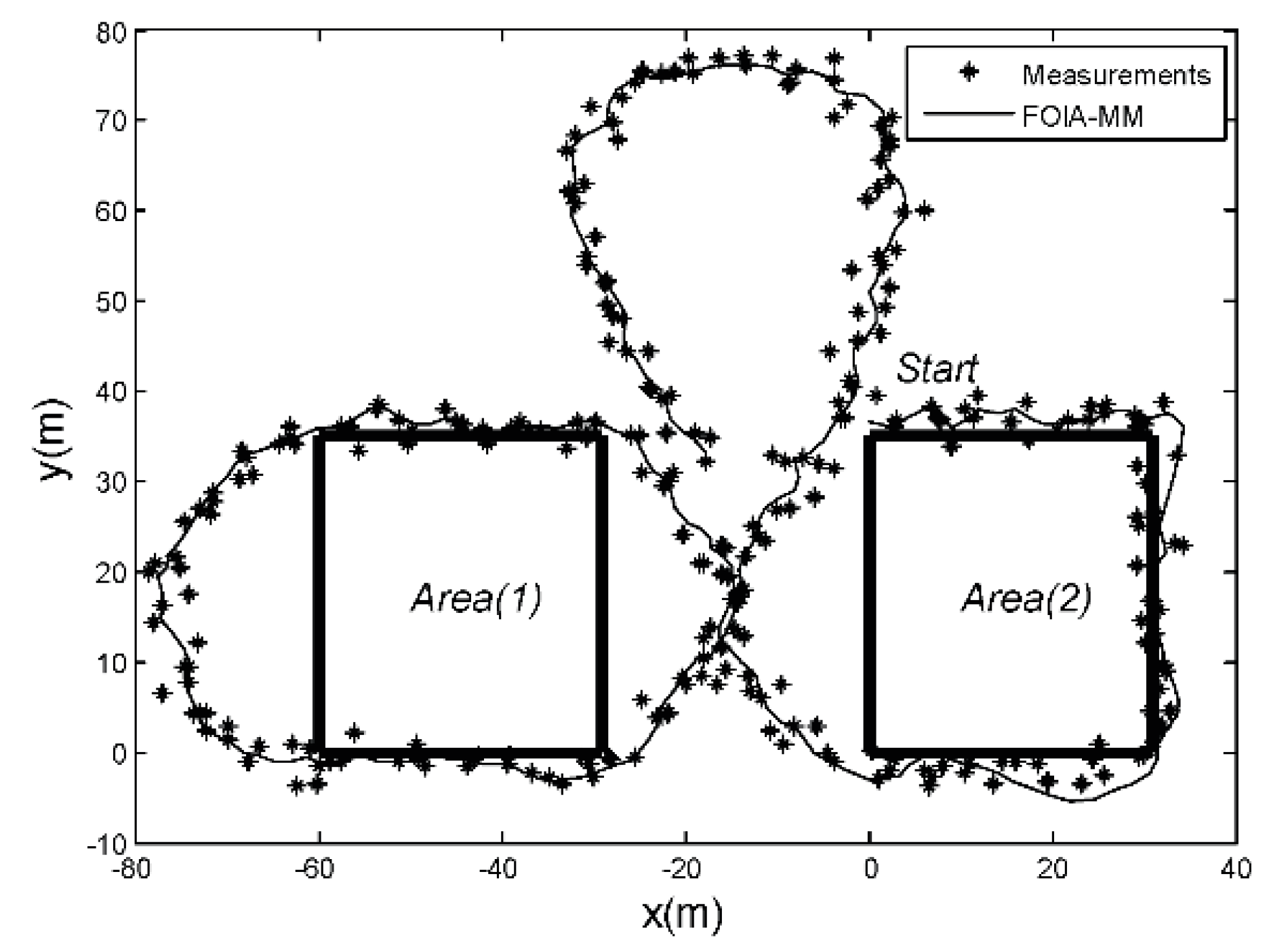
4.1. Simulation Scenario
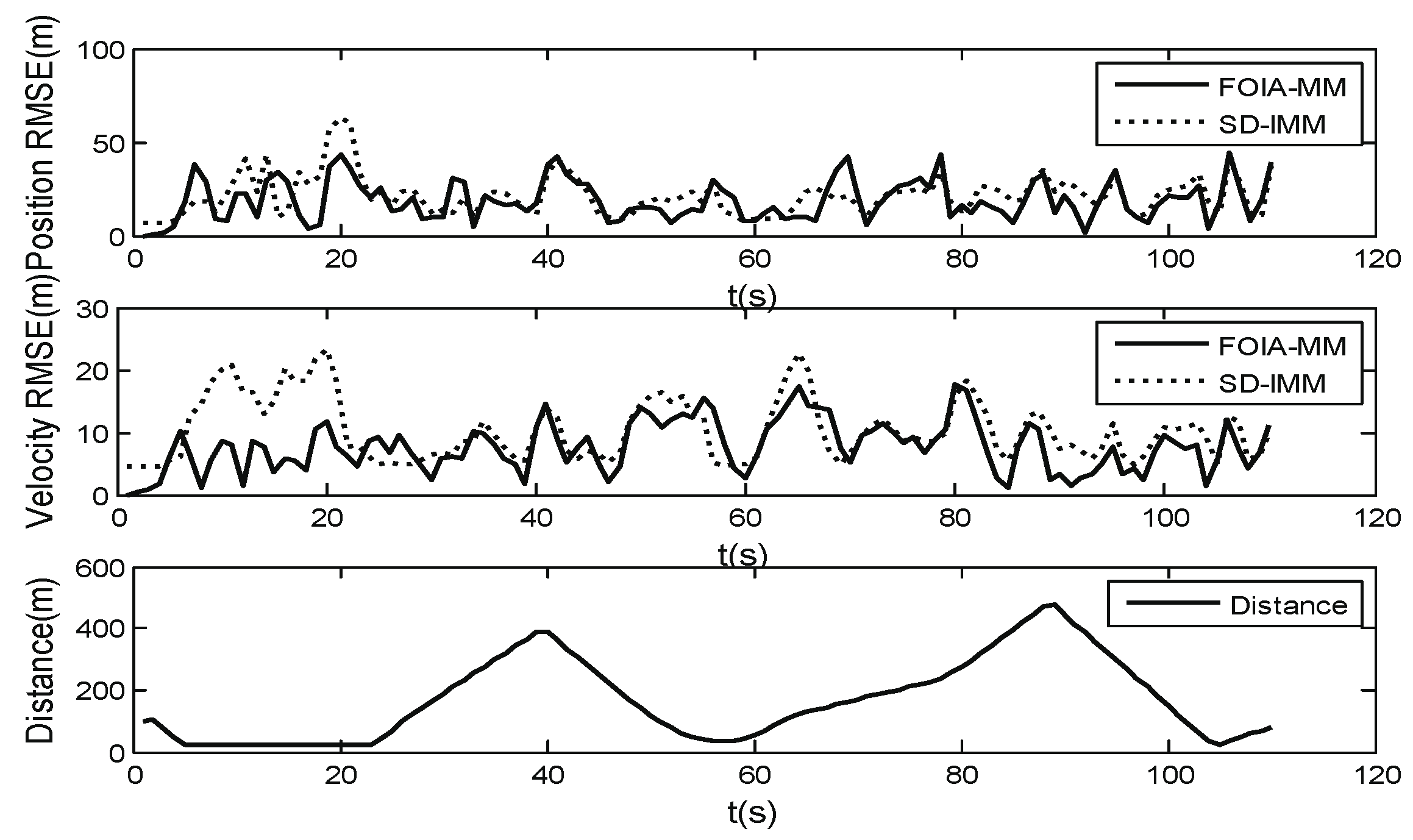
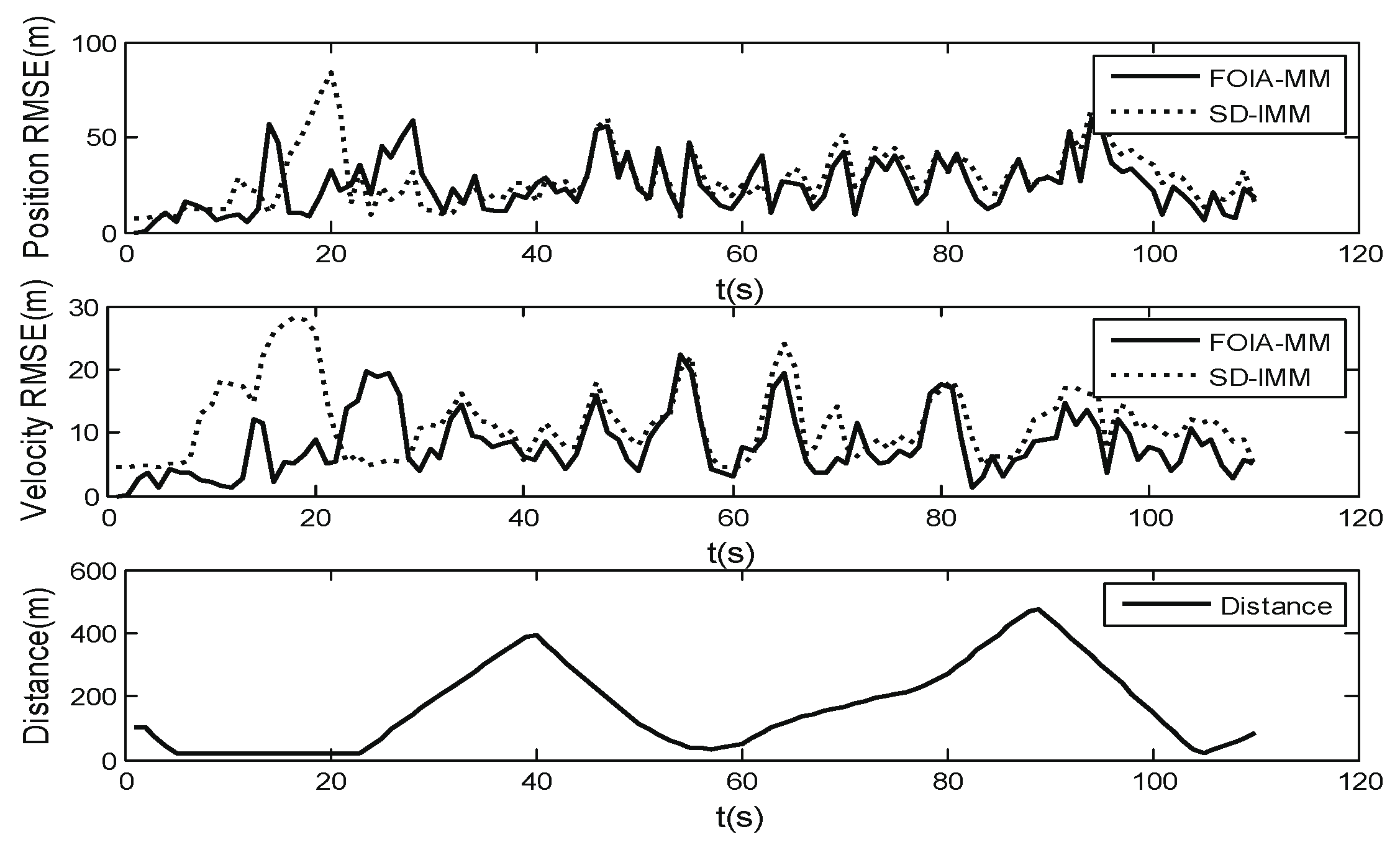
4.2. Performance Comparison
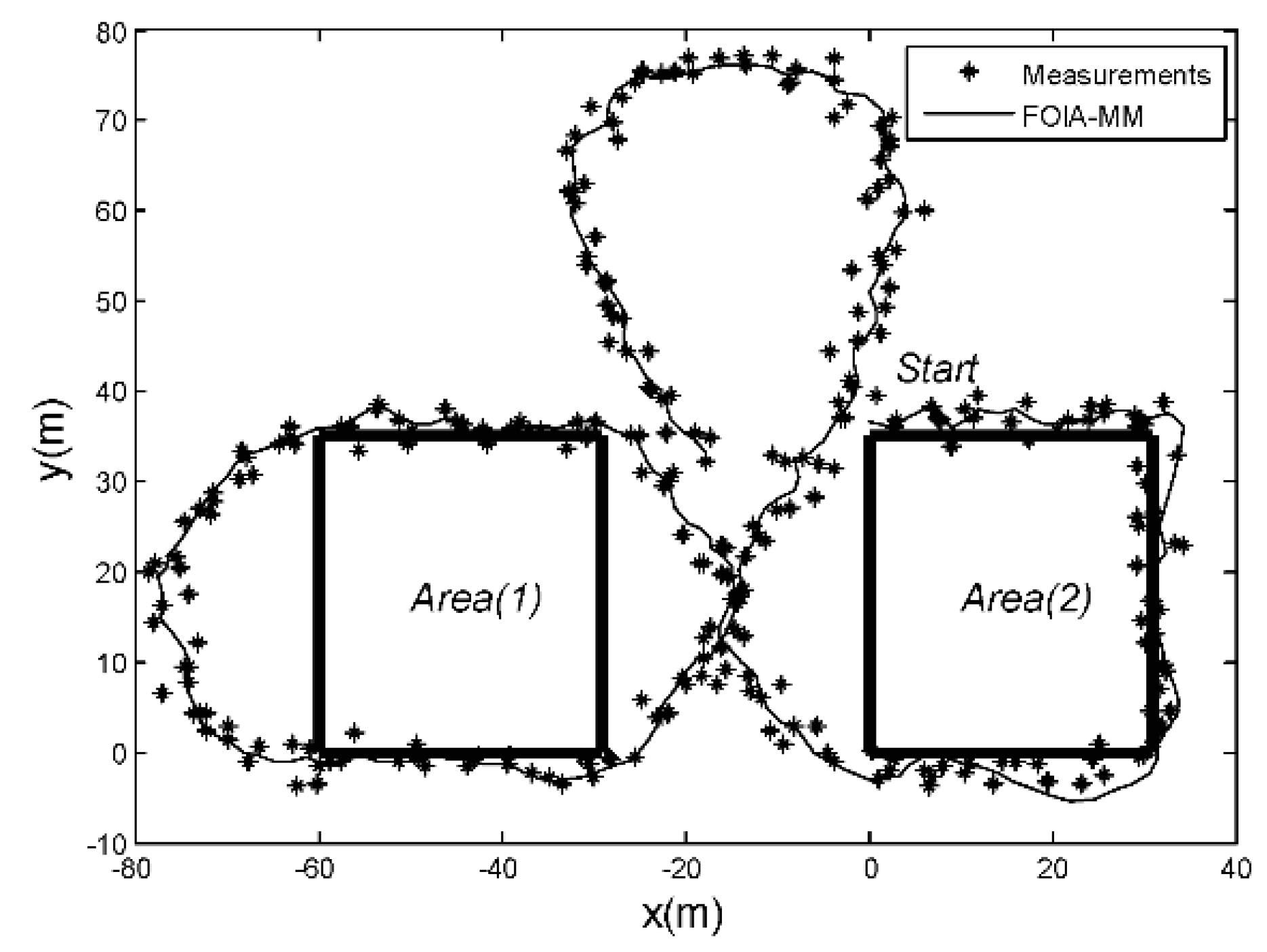
4.3. Field Experiment and Results Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part V: Multiple-model methods. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1255–1321. [Google Scholar]
- Magill, D. Optimal adaptive estimation of sampled stochastic processes. IEEE Trans. Autom. Control 1965, 10, 434–439. [Google Scholar] [CrossRef]
- Blom, H.A.P.; Bar-Shalom, Y. The interacting multiple model algorithm for systems with Markovian switching coefficients. IEEE Trans. Autom. Control 1988, 33, 780–783. [Google Scholar] [CrossRef]
- Busch, M.T.; Blackman, S.S. Evaluation of IMM filtering for an air defense system application. Proc. SPIE—Int. Soc. Opt. Eng. 1995, 2561, 435–447. [Google Scholar]
- Li, X.R.; Bar-Shalom, Y. Performance prediction of the interacting multiple model algorithm. IEEE Trans. Aerosp. Electron. Syst. 1993, 29, 755–771. [Google Scholar] [CrossRef]
- Li, X.R.; Bar-Shalom, Y. Design of an interacting multiple model algorithm for air traffic control tracking. IEEE Trans. Control Syst. Technol. 1993, 1, 186–194. [Google Scholar] [CrossRef]
- Li, X.R.; Bar-Shalom, Y. Multiple-model estimation with variable structure. IEEE Trans. Autom. Control 1996, 41, 478–493. [Google Scholar]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part I: Dynamic models. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1333–1364. [Google Scholar]
- Li, X.R.; Zwi, X.; Zwang, Y. Multiple-model estimation with variable structure. III. Model-group switching algorithm. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 225–241. [Google Scholar]
- Xu, L.; Li, X.R.; Duan, Z. Hybrid grid multiple-model estimation with application to maneuvering target tracking. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 122–136. [Google Scholar] [CrossRef]
- Chen, Y.; Jilkov, V.P.; Li, X.R. Multilane-road target tracking using radar and image sensors. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 65–80. [Google Scholar] [CrossRef]
- Rastgoufard, R.; Jilkov, V.P.; Li, X.R. Incorporating world information into the IMM algorithm via state-dependent value assignment. In Proceedings of the IEEE International Conference on Information Fusion, Salamanca, Spain, 7–10 July 2014; pp. 1–8. [Google Scholar]
- Xu, L.; Li, X.R.; Liang, Y.; Duan, Z. Constrained Dynamic Systems: Generalized Modeling and State Estimation. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2594–2609. [Google Scholar] [CrossRef]
- Zhang, M.; Knedlik, S.; Loffeld, O. An adaptive road-constrained IMM estimator for ground target tracking in GSM networks. In Proceedings of the International Conference on Information Fusion, Cologne, Germany, 30 June–3 July 2008; pp. 1–8. [Google Scholar]
- Kirubarajan, T.; Bar-Shalom, Y.; Pattipati, K.R.; Kadar, I. Ground target tracking with variable structure IMM estimator. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 26–46. [Google Scholar] [CrossRef]
- Seah, C.E.; Hwang, I. State Estimation for Stochastic Linear Hybrid Systems with Continuous-State-Dependent Transitions: An IMM Approach. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 376–392. [Google Scholar] [CrossRef]
- Hwang, I.; Seah, C.E. An Estimation Algorithm for Stochastic Linear Hybrid Systems with Continuous-State-Dependent Mode Transitions. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 131–136. [Google Scholar]
- Wang, Q.; Huang, J.; Huang, J. Fuzzy logic-based multi-factor aided multiple-model filter for general aviation target tracking. J. Intell. Fuzzy Syst. 2015, 29, 2603–2609. [Google Scholar] [CrossRef]
- Fan, E.; Xie, W.; Liu, Z.; Li, P.F. Range-only Target Localisation using Geometrically Constrained Optimisation. Def. Sci. J. 2015, 65, 70–76. [Google Scholar] [CrossRef]
- Lan, J.; Li, X.R. Nonlinear Estimation by LMMSE-Based Estimation with Optimized Uncorrelated Augmentation. IEEE Trans. Signal Process. 2015, 63, 4270–4283. [Google Scholar] [CrossRef]
- Kirubarajan, T.; Bar-Shalom, Y.; Blair, W.D.; Watson, G.A. IMMPDAF for radar management and tracking benchmark with ECM. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 1115–1134. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1. Conditioned (re)initialization |
| Predicted MP: |
| Mixing MP: |
| Mixing state: |
| Mixing covariance: |
| 2. Kalman filtering |
| Predicted state: |
| Predicted covariance: |
| Measurement residual: |
| Residual covariance: |
| Filter gain: |
| Updated state: |
| Updated covariance: |
| 3. updated MP and TPM |
| Model likelihood: |
| Model weight: |
| Updated MP: |
| Expected sojourn time: |
| Updated TPM: |
| 4. Combination |
| Overall state: |
| Overall covariance: |
| Model | CV | CV | |||
| Time (s) | |||||
| Model | CV | CV | |||
| Time (s) |
| VN | ME | FA | ||
| ZE | ZE | LOW | HI | |
| ZE | ME | HI | ||
| LP | ZE | LOW | LOW | |
| VN | ME | FA | ||
| ZE | VS | ME | VL | |
| VS | LO | VL | ||
| LP | VS | VS | SH | |
| Model | CV | |||||
| Position (1) | FOIA-MM | 0.09 | 0.13 | 0.11 | 0.04 | 0.63 |
| SD-IMM | 0.14 | 0.16 | 0.20 | 0.14 | 0.36 | |
| Model | CV | |||||
| Position (2) | FOIA-MM | 0.15 | 0.60 | 0.16 | 0.05 | 0.04 |
| SD-IMM | 0.21 | 0.25 | 0.24 | 0.10 | 0.20 |
| Measured | Estimated | Improvement | |
|---|---|---|---|
| FOIA-MM | 655 | 5 | 99.24% |
| SD-IMM | 655 | 490 | 25.2% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Fan, E.; Li, P. Fuzzy-Logic-Based, Obstacle Information-Aided Multiple-Model Target Tracking. Information 2019, 10, 48. https://doi.org/10.3390/info10020048
Wang Q, Fan E, Li P. Fuzzy-Logic-Based, Obstacle Information-Aided Multiple-Model Target Tracking. Information. 2019; 10(2):48. https://doi.org/10.3390/info10020048
Chicago/Turabian StyleWang, Quanhui, En Fan, and Pengfei Li. 2019. "Fuzzy-Logic-Based, Obstacle Information-Aided Multiple-Model Target Tracking" Information 10, no. 2: 48. https://doi.org/10.3390/info10020048
APA StyleWang, Q., Fan, E., & Li, P. (2019). Fuzzy-Logic-Based, Obstacle Information-Aided Multiple-Model Target Tracking. Information, 10(2), 48. https://doi.org/10.3390/info10020048