
Numerical Simulation of the Motion of a Large Scale Unmanned Surface Vessel in High Sea State Waves



Abstract
:1. Introduction
2. Numerical Model
2.1. Governing Equations and Turbulence Models
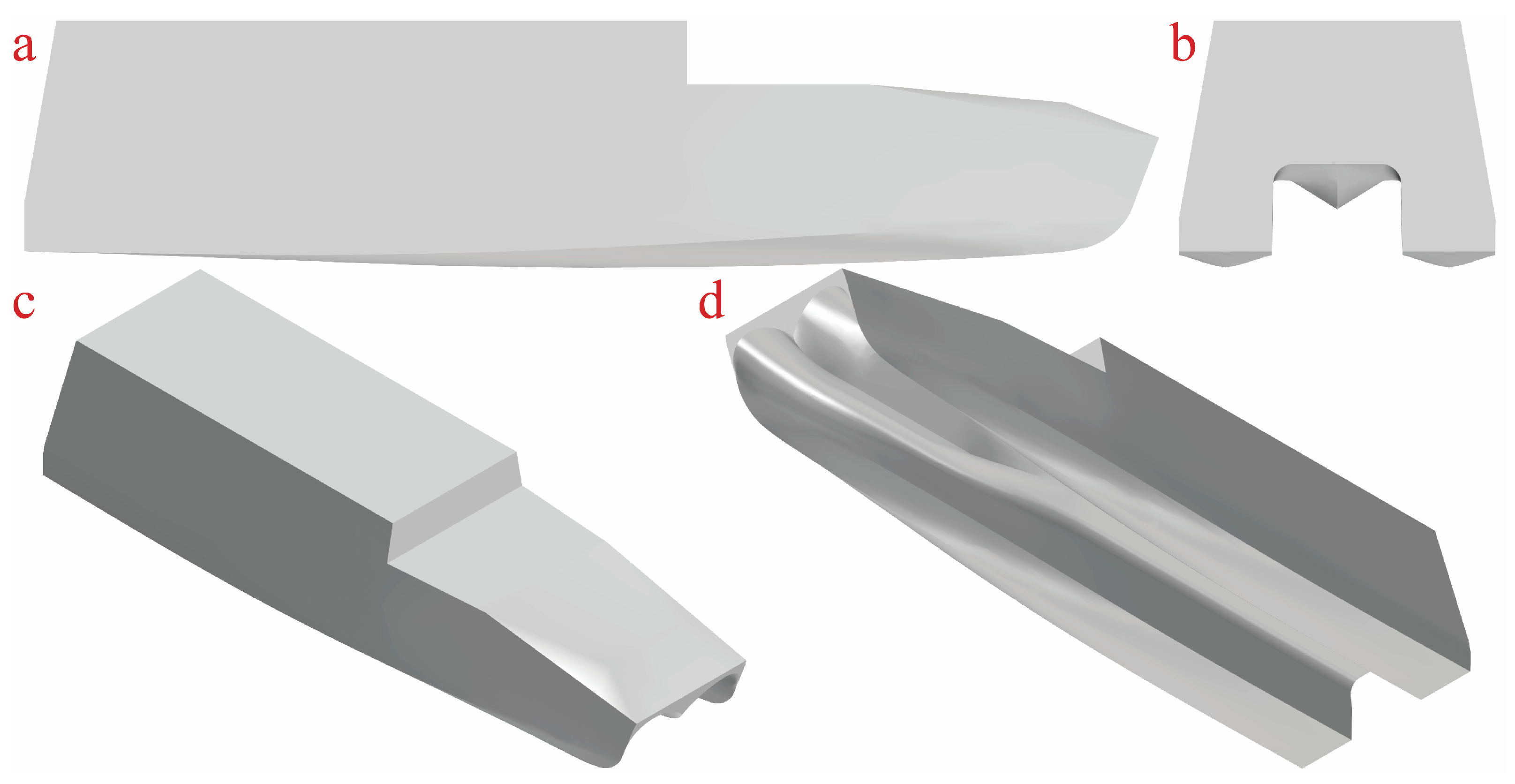
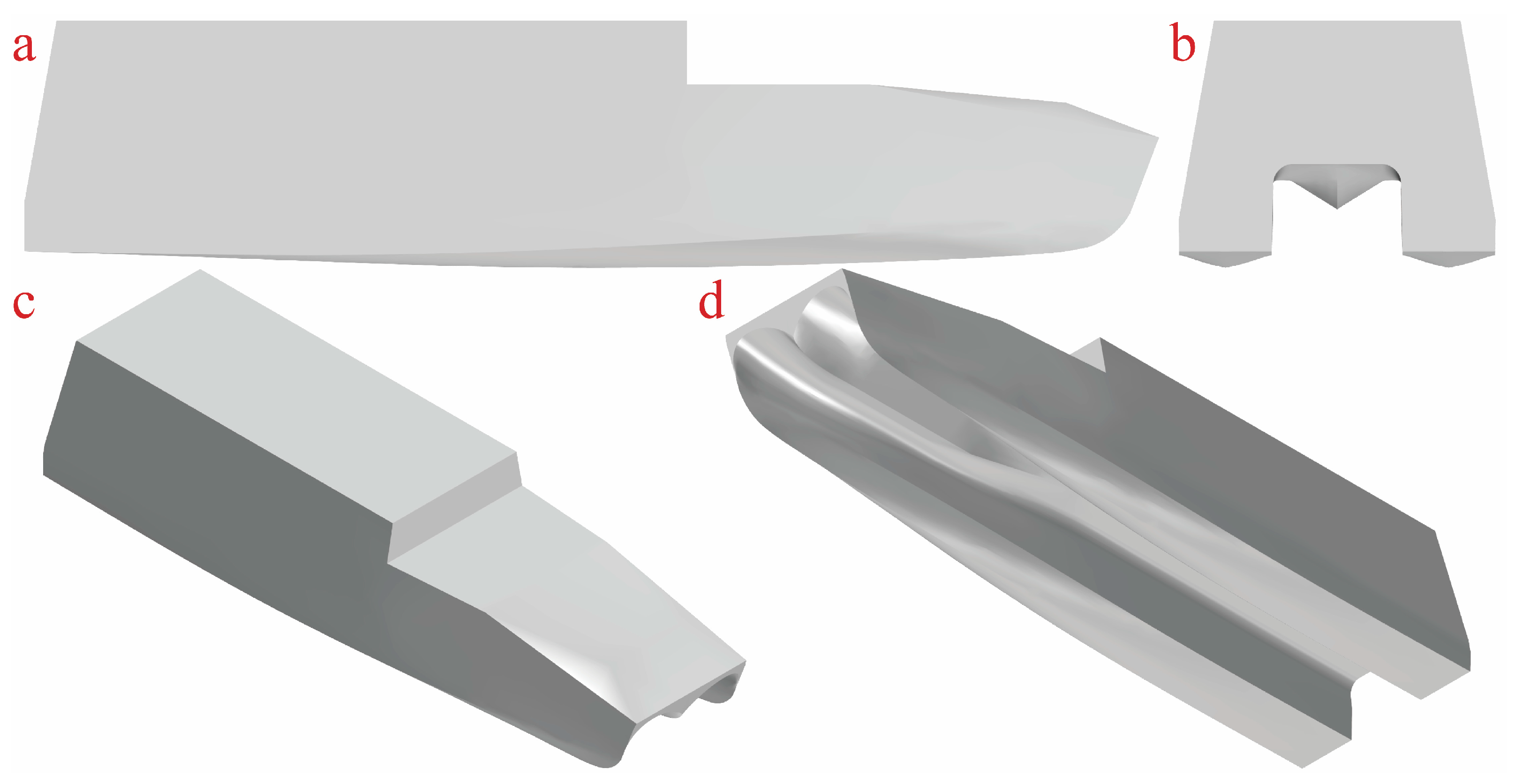
2.2. USV Model
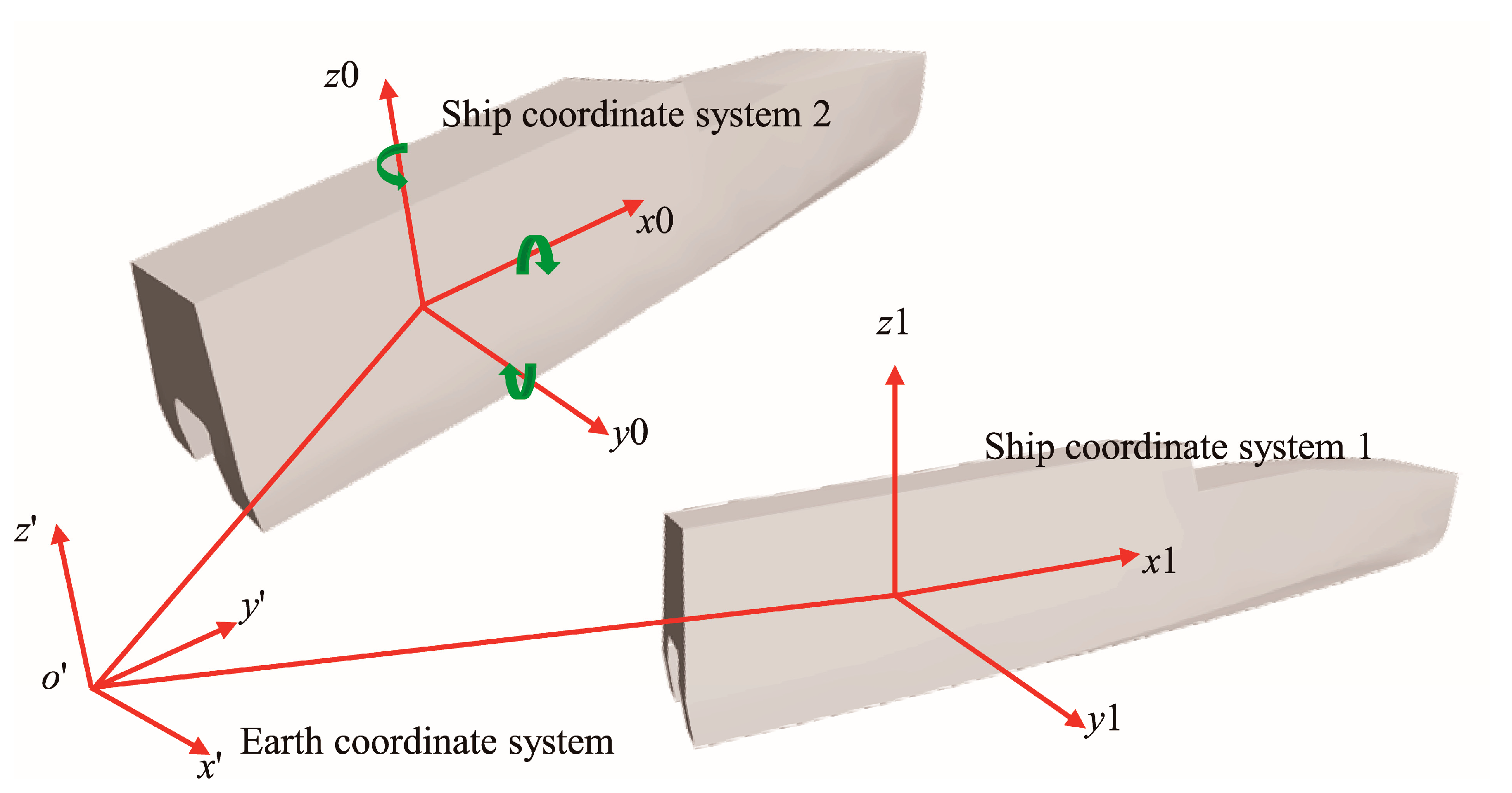
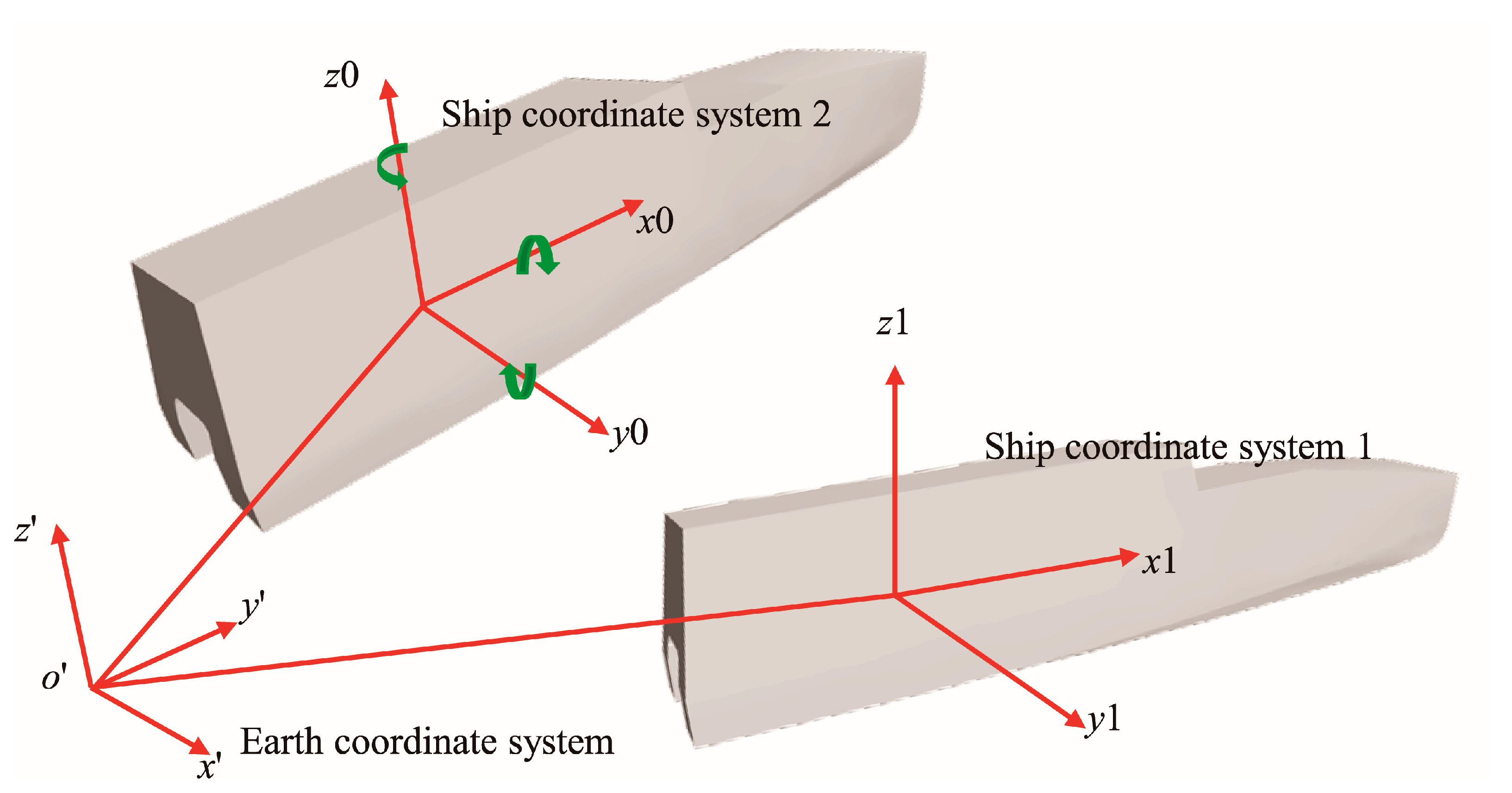
2.3. Degree of Freedom Model
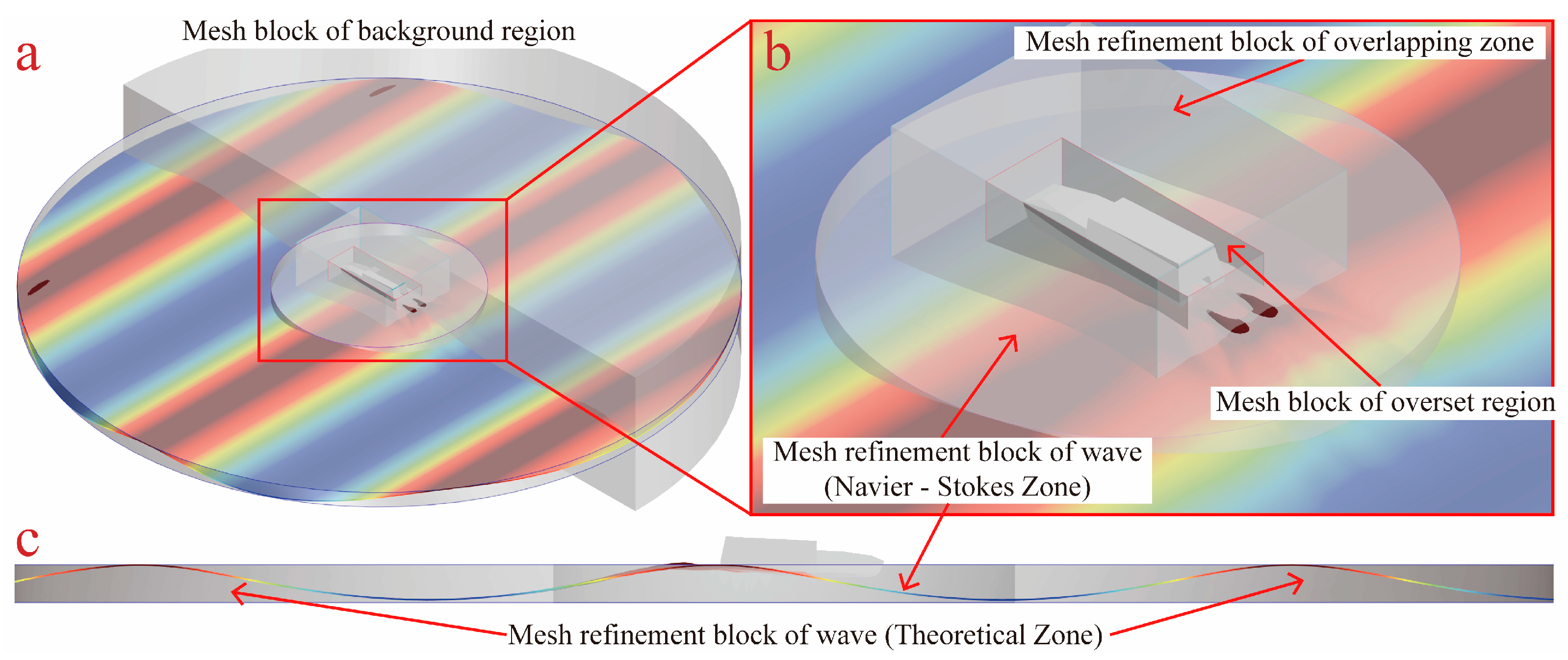
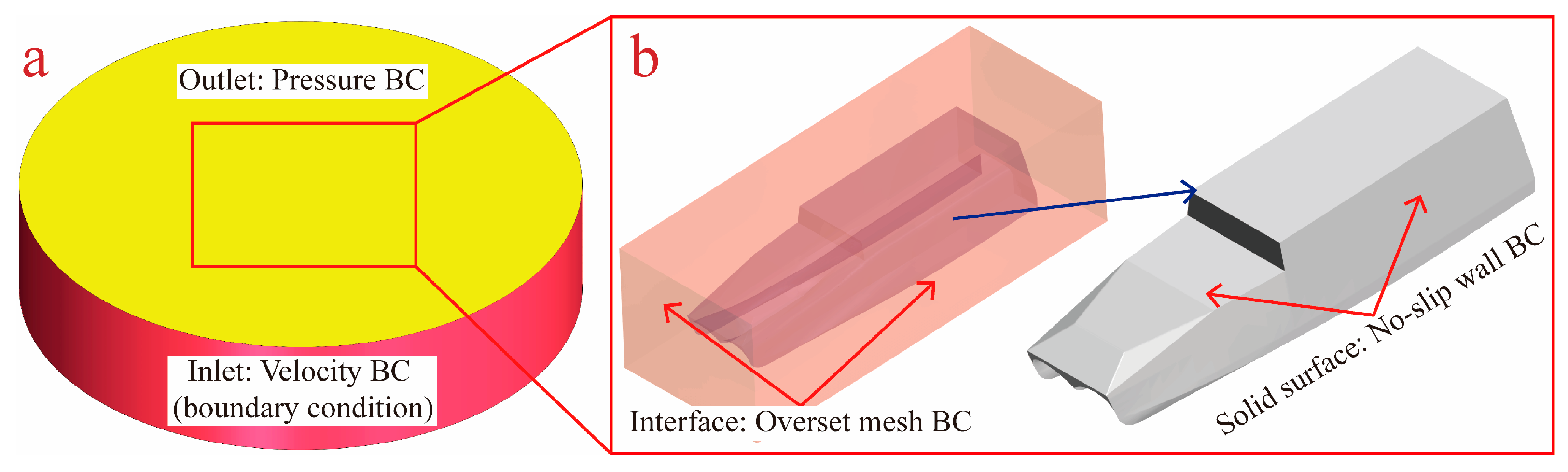
2.4. Computational Domain and Boundary Conditions
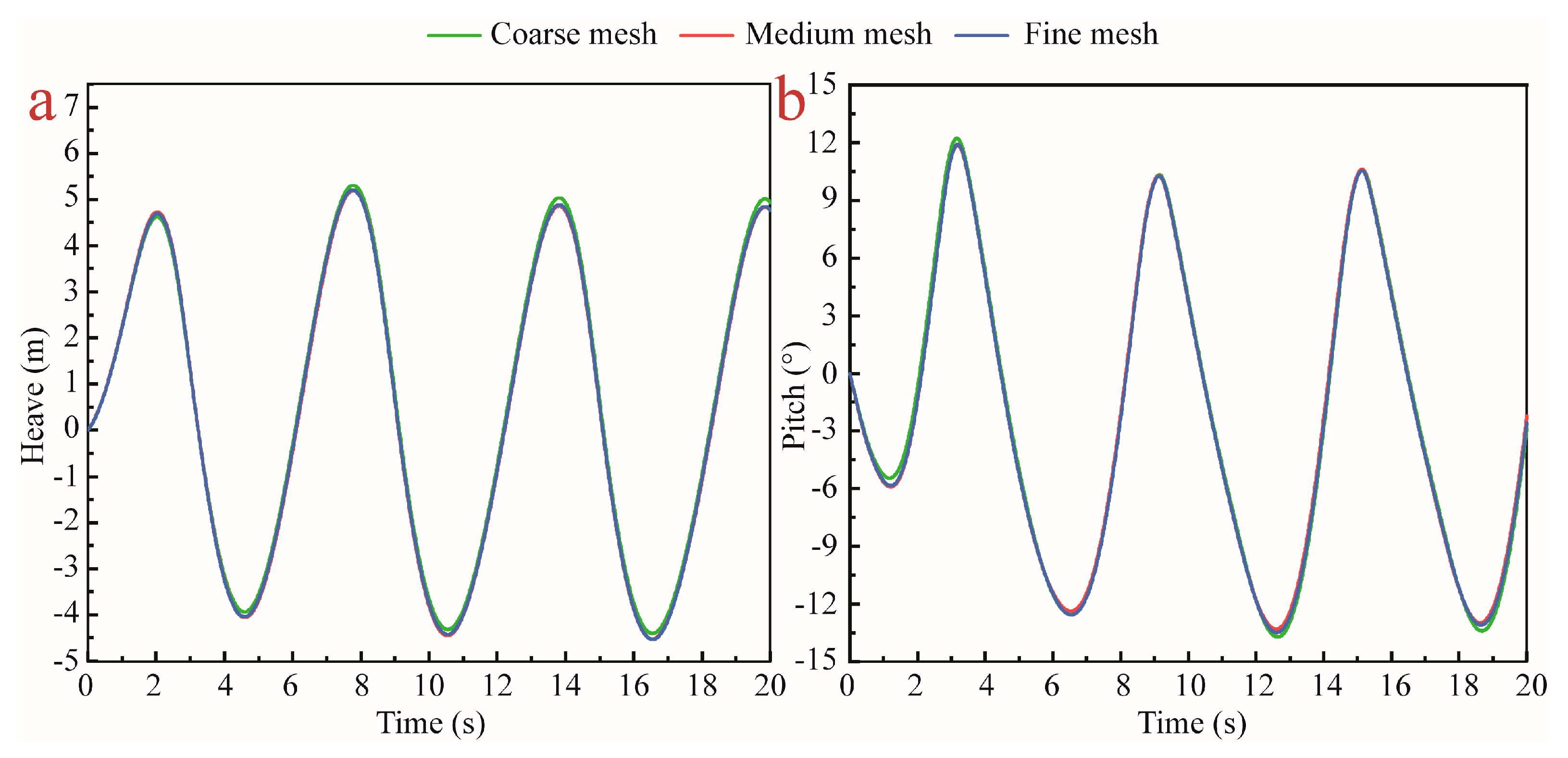
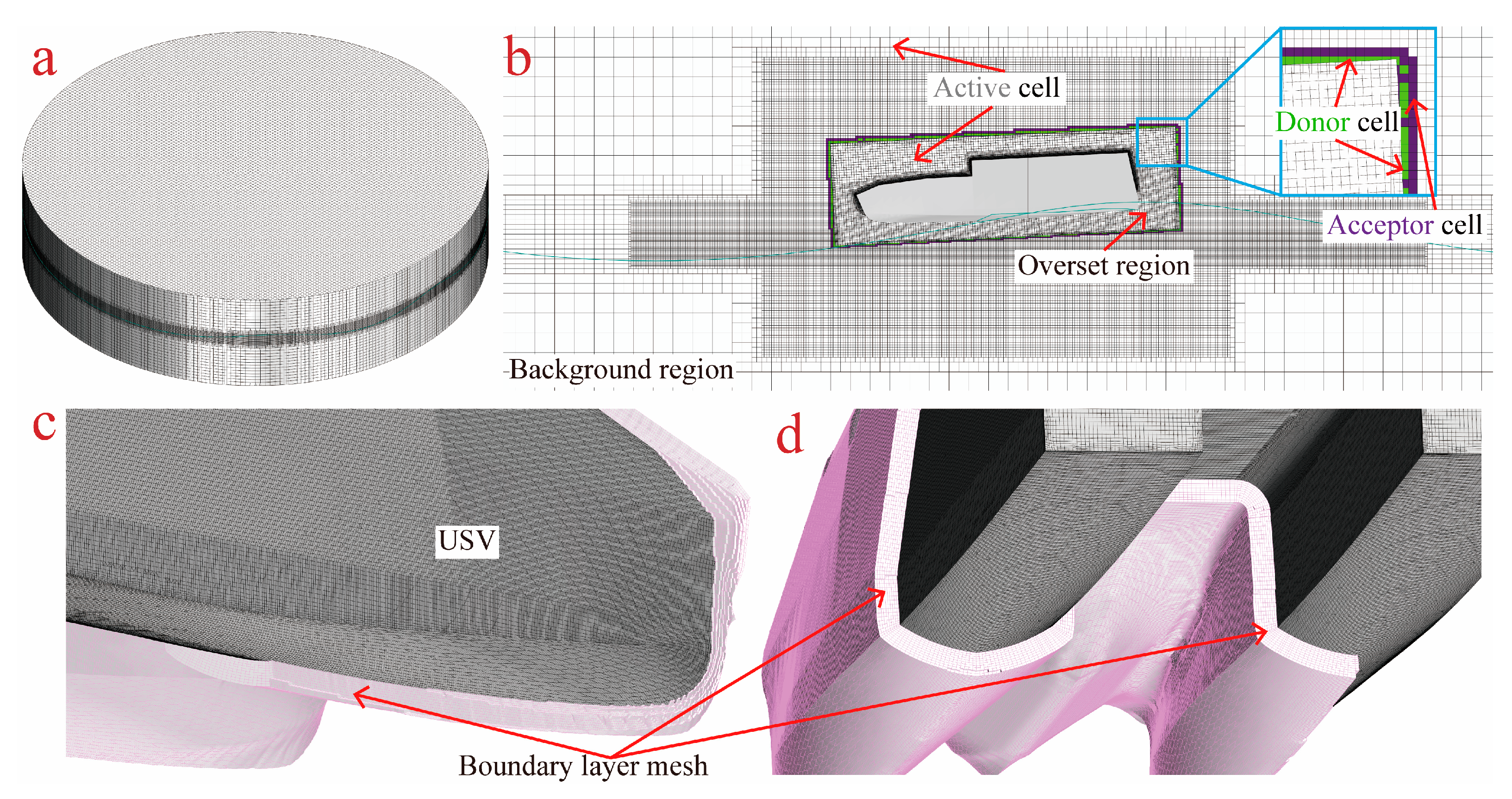
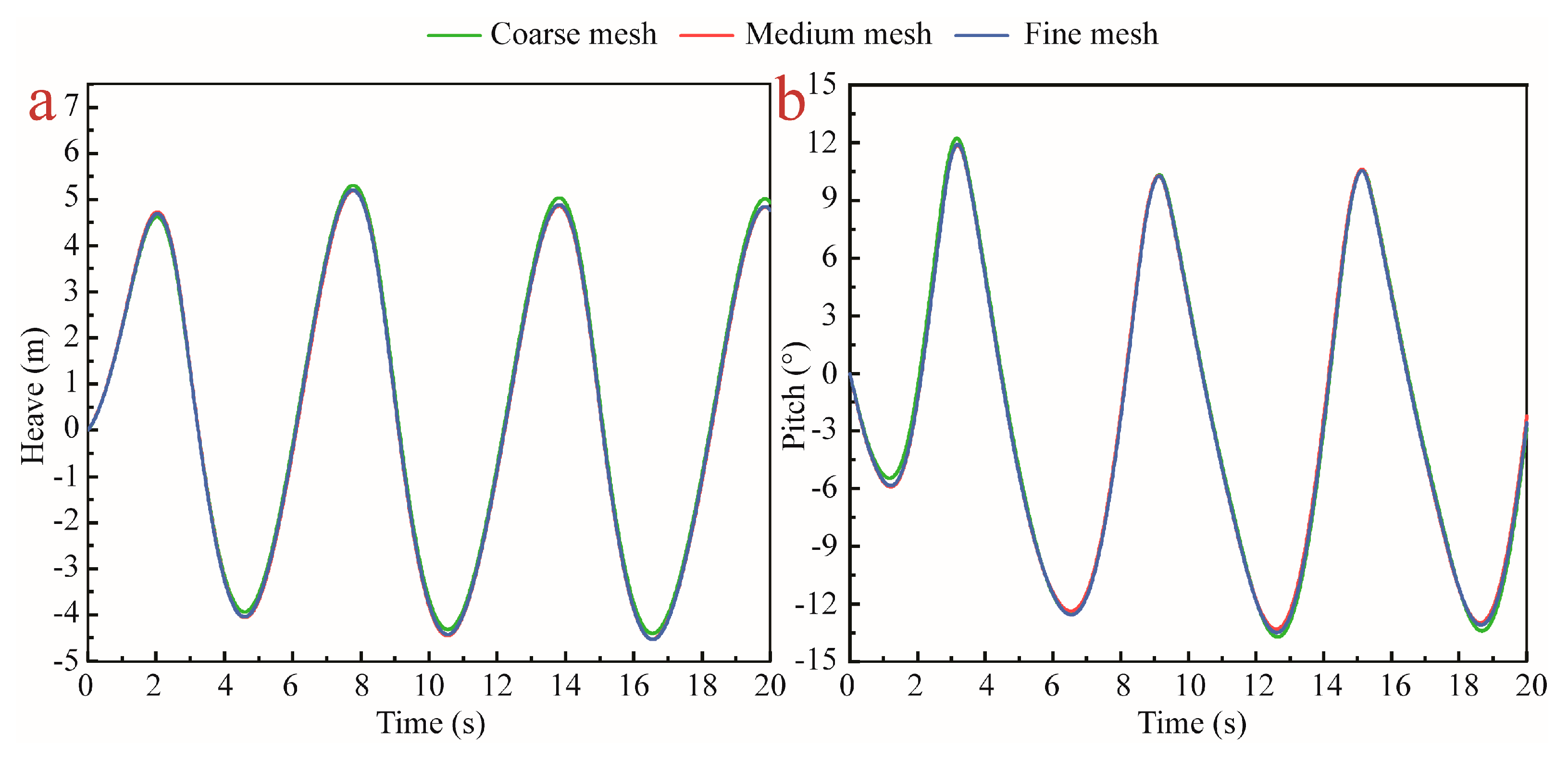
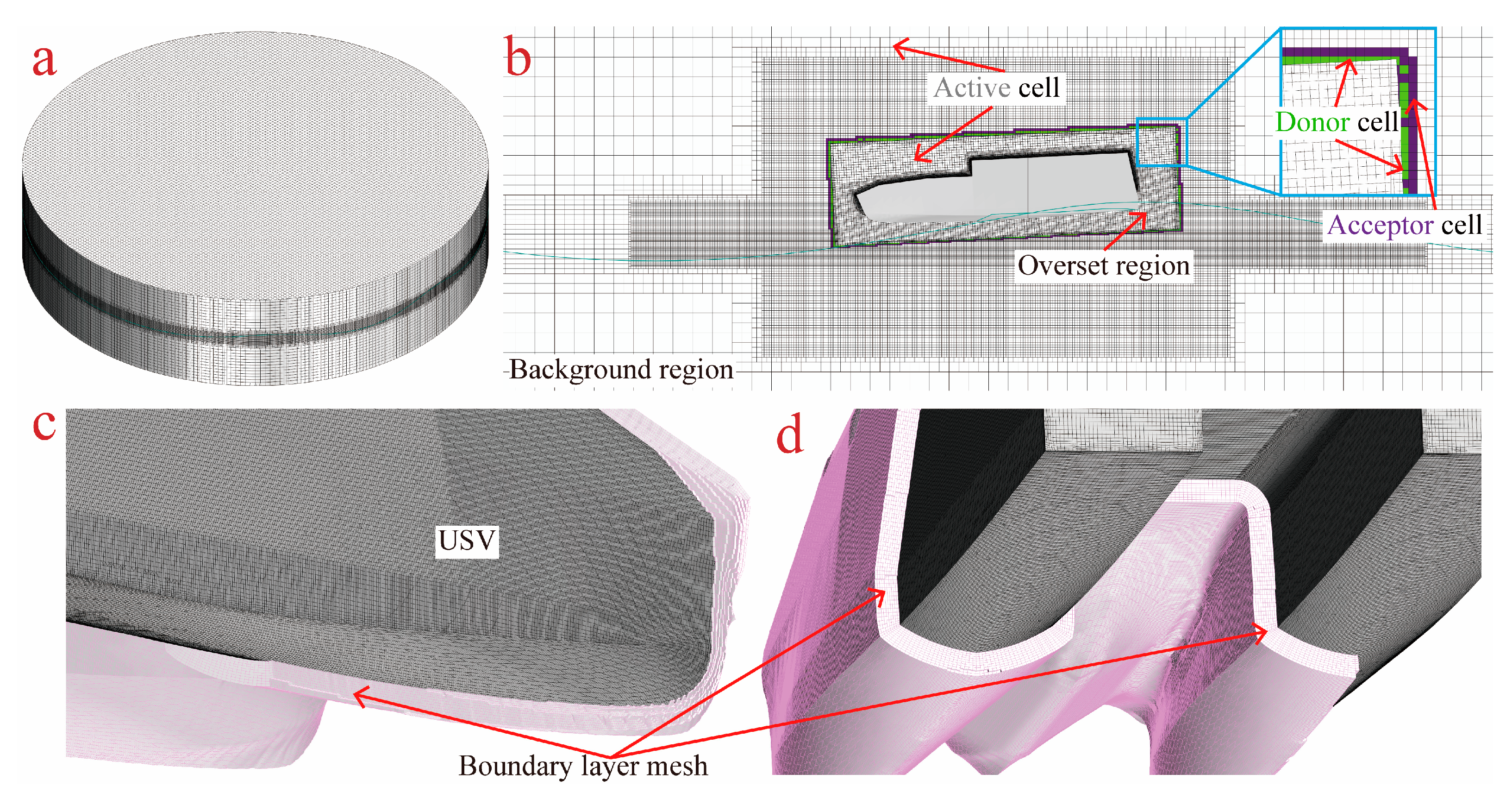
2.5. Computational Mesh and Sensitivity Study
3. Numerical Wave Tank and Verification
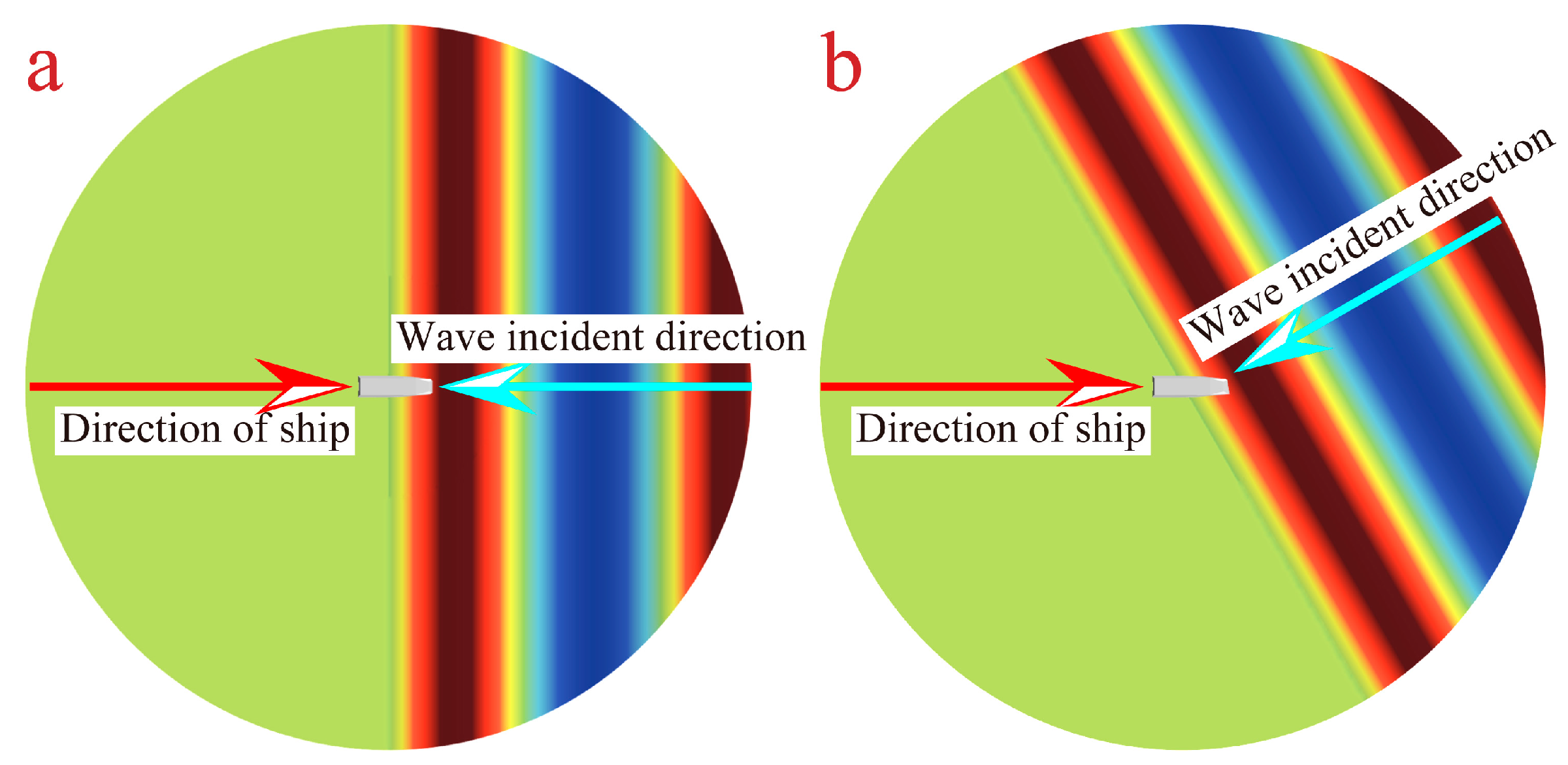
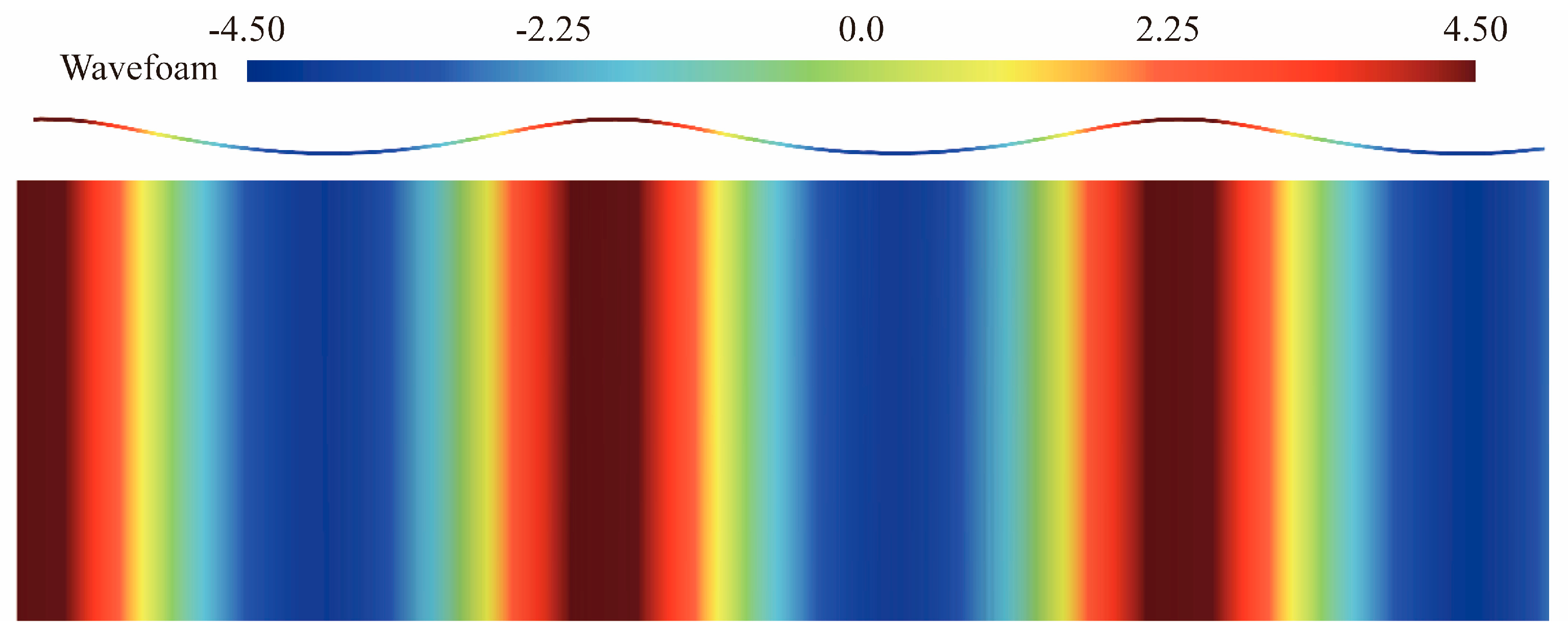
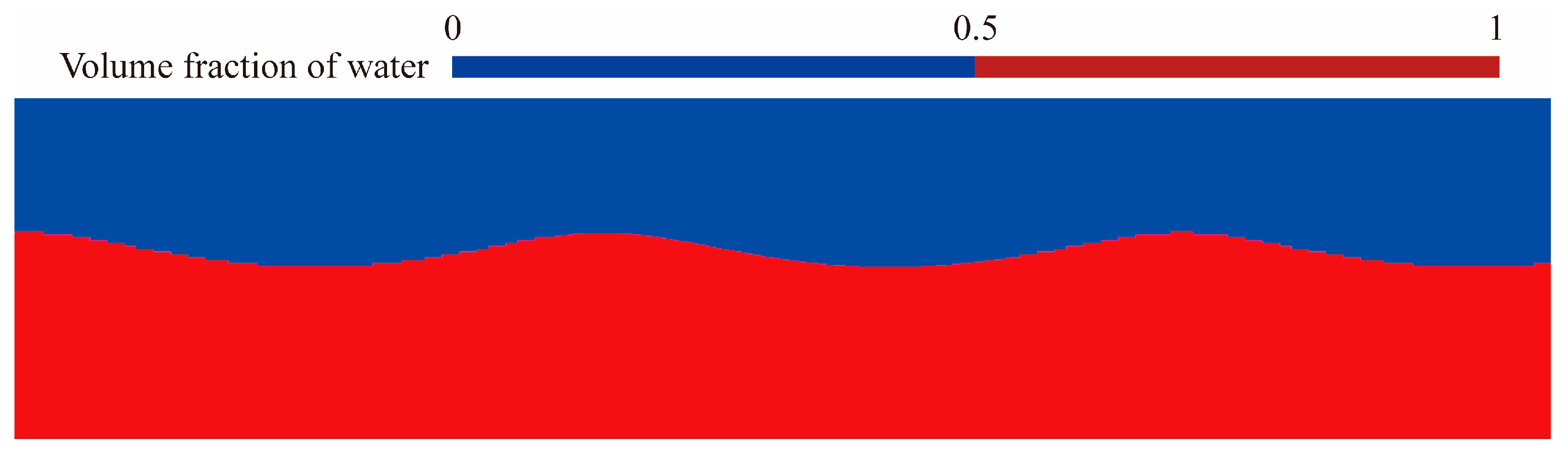
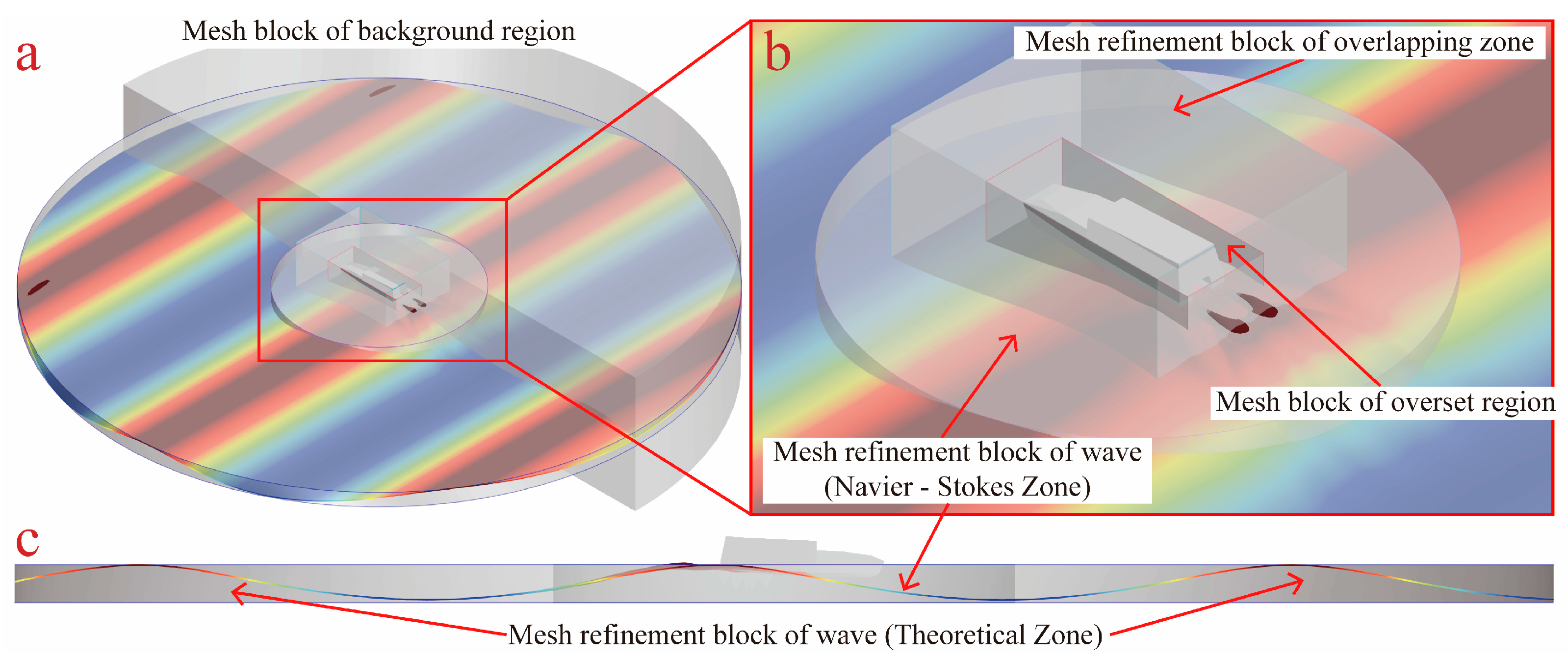
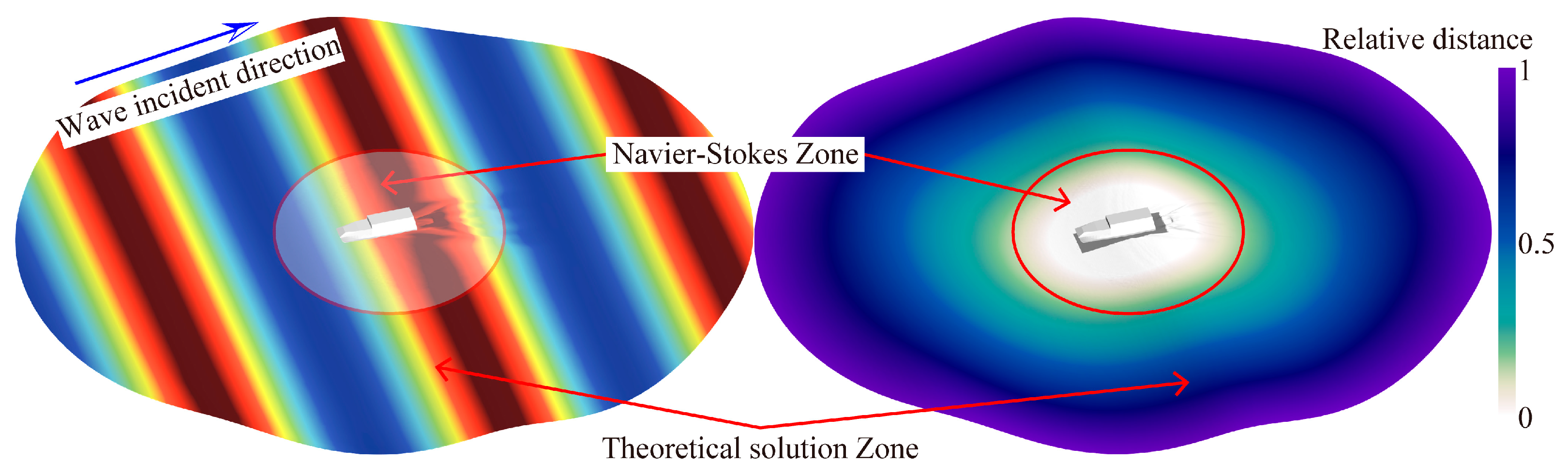
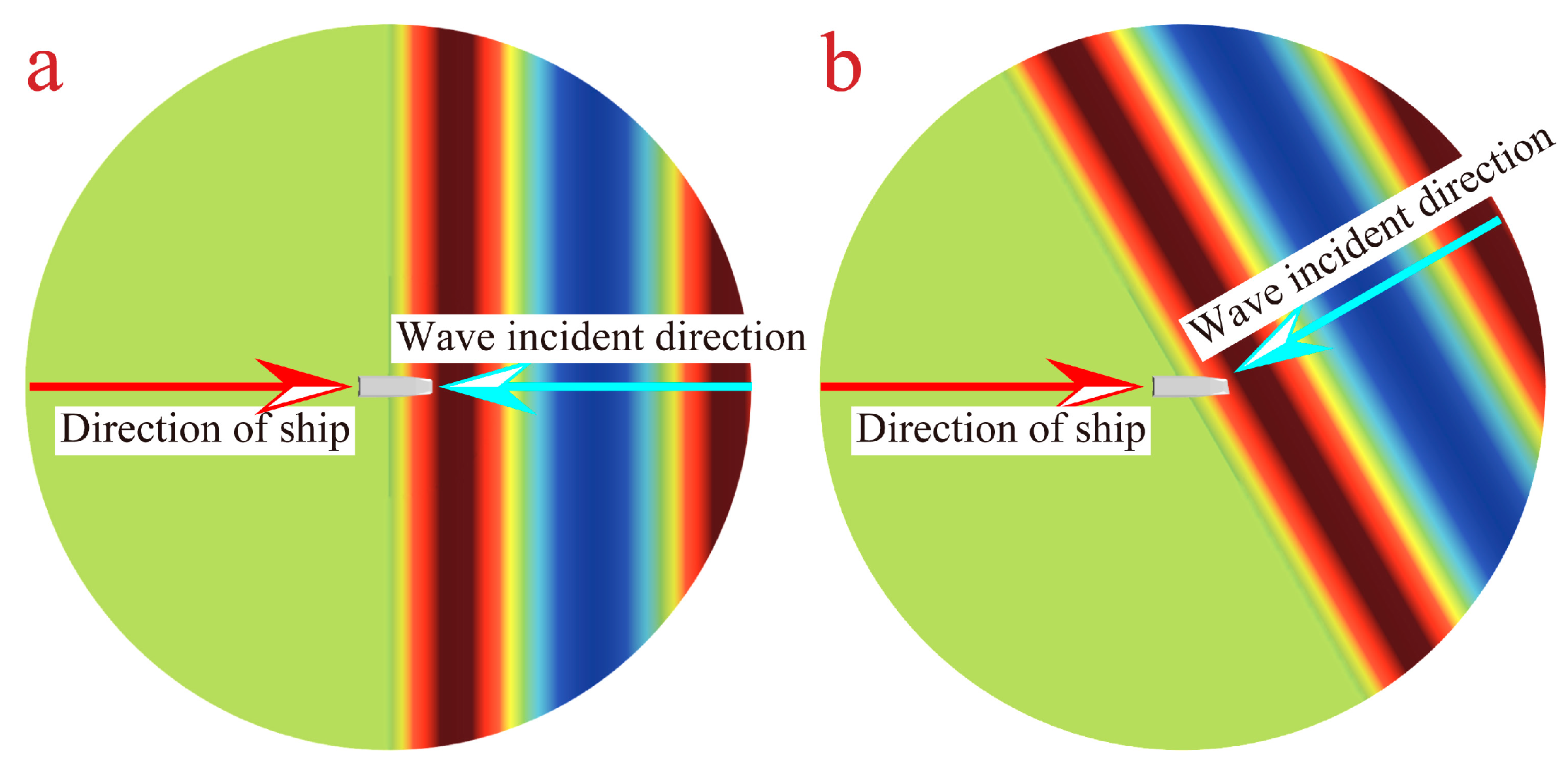
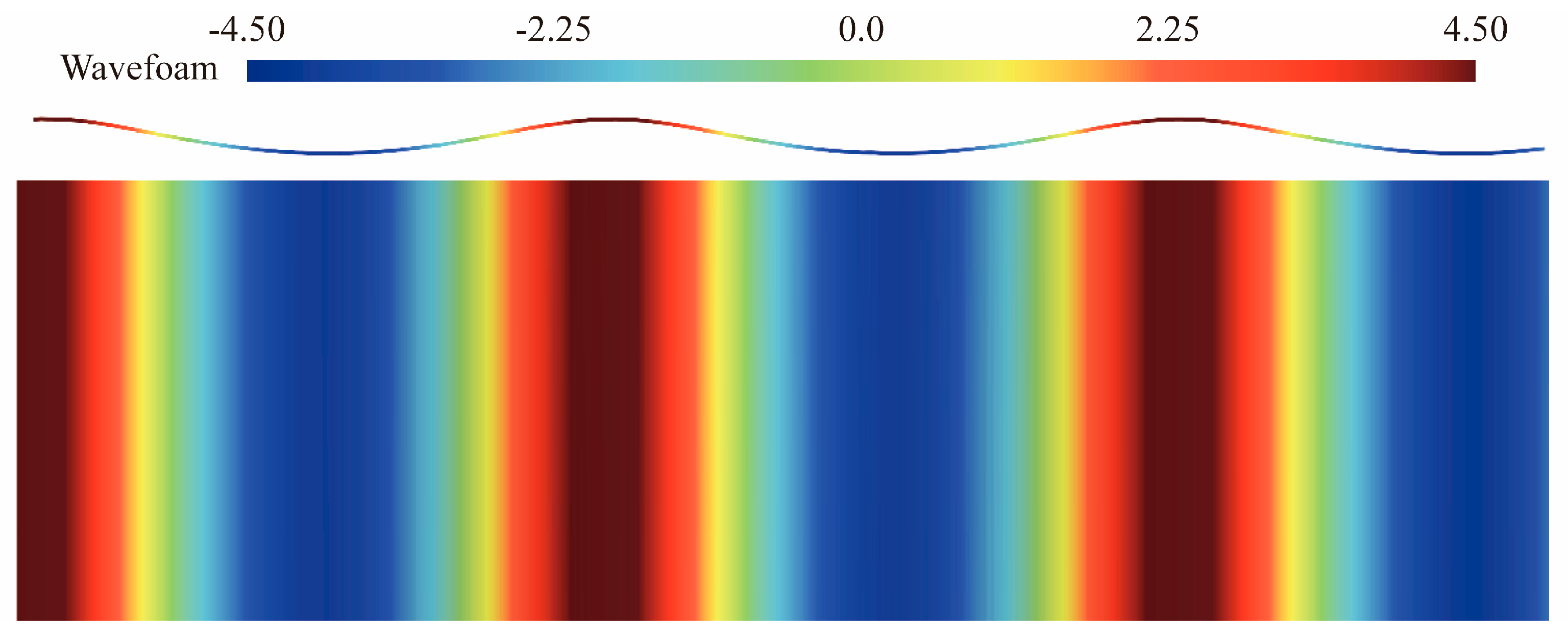
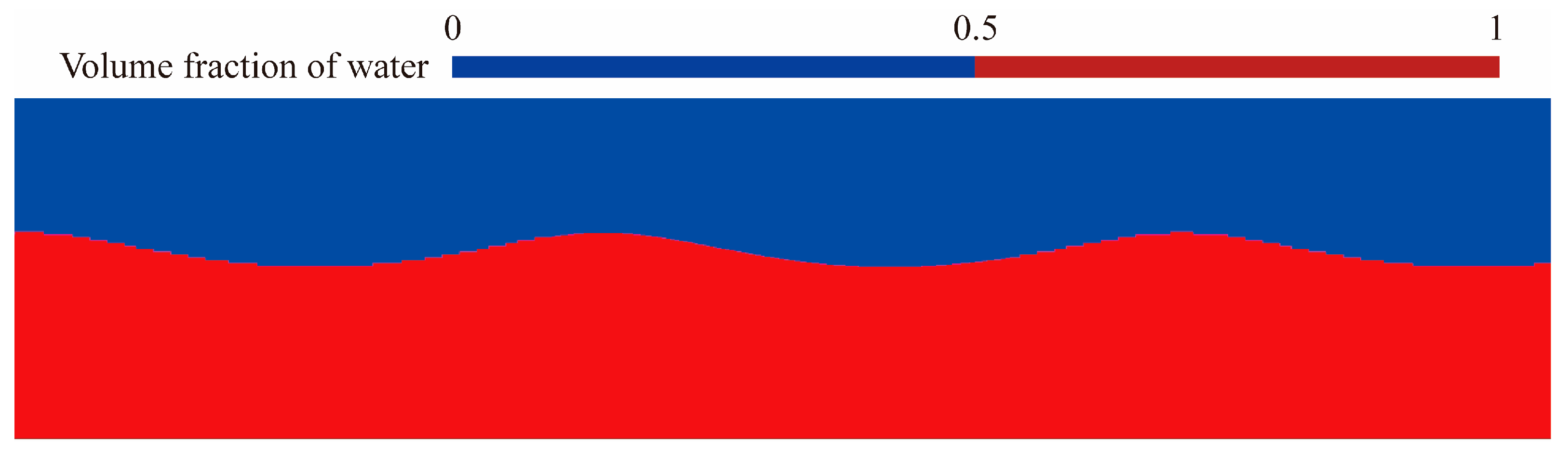
3.1. Numerical Wave Tank
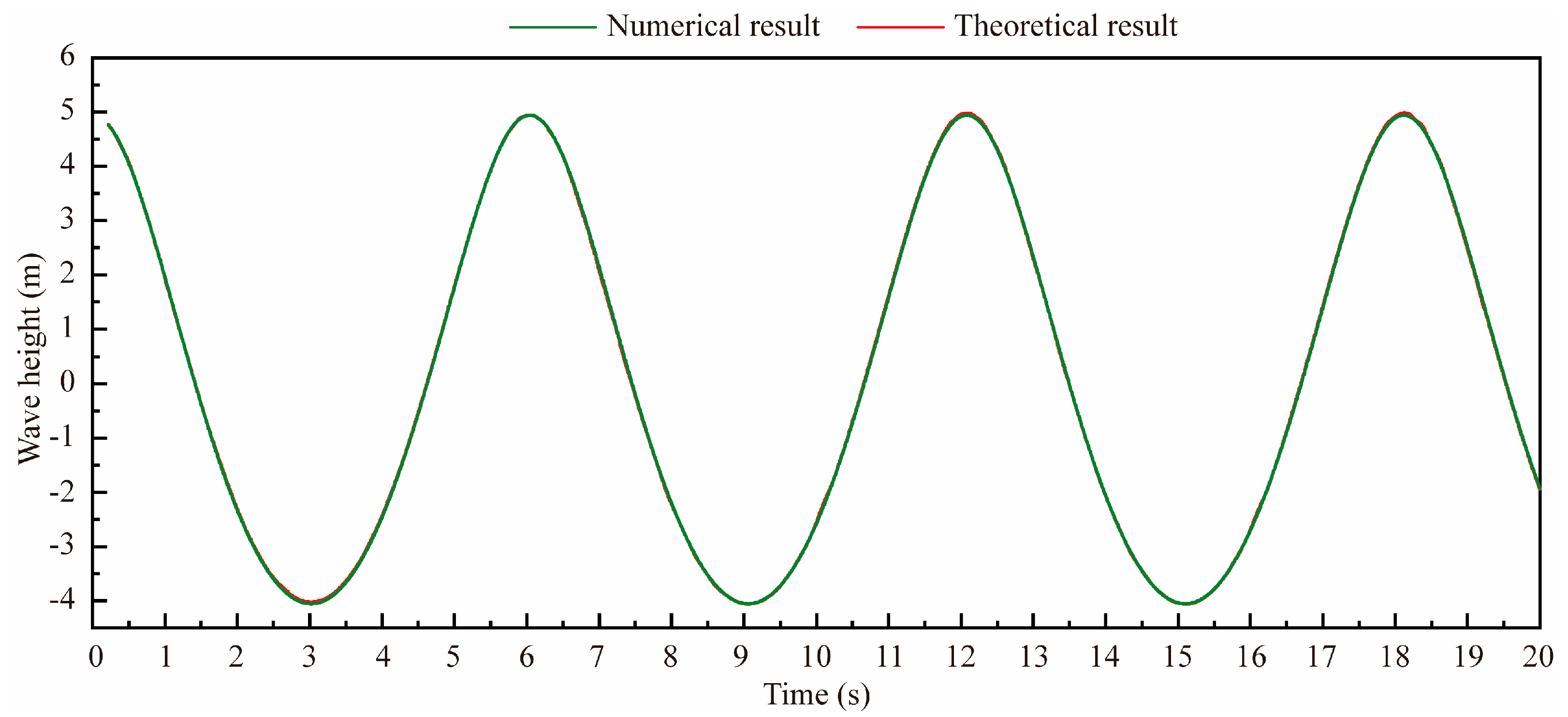
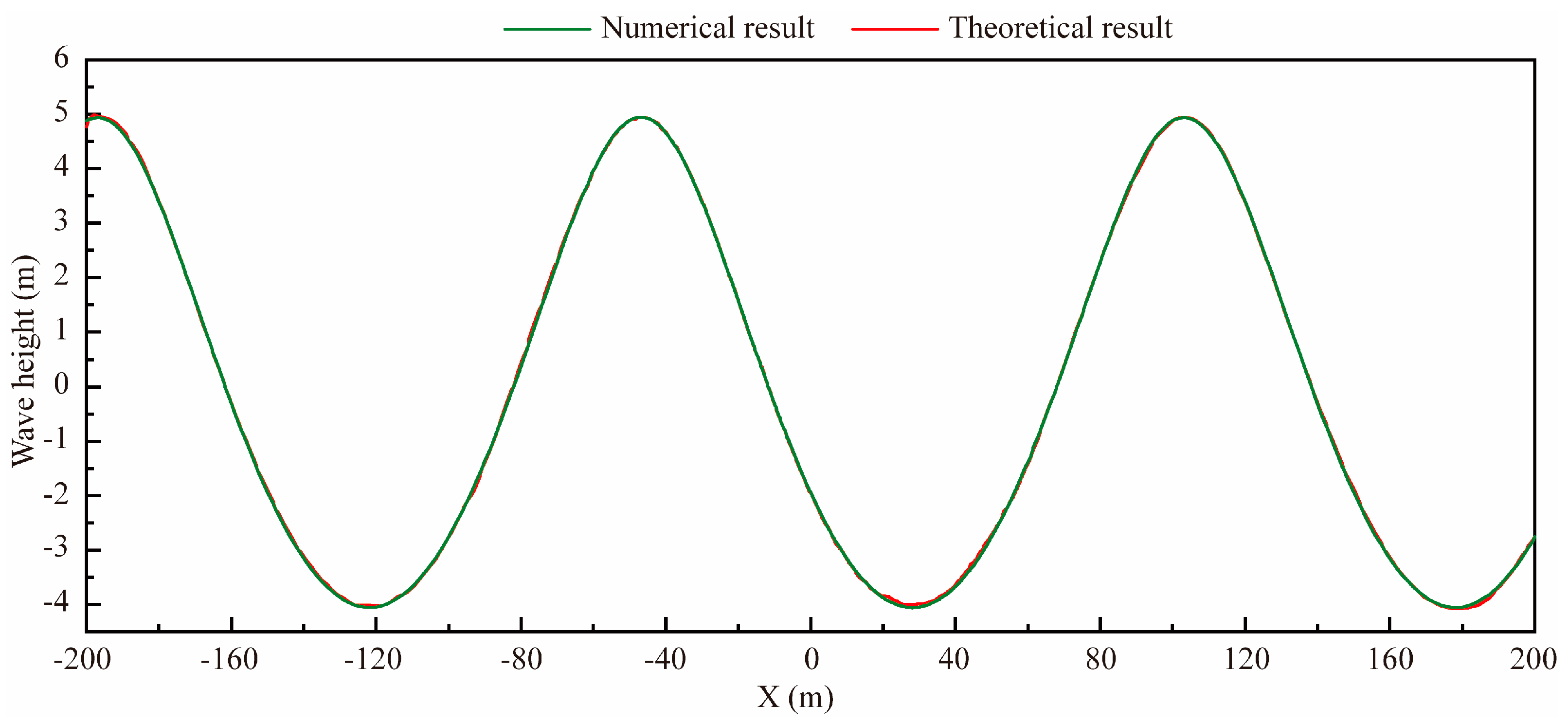
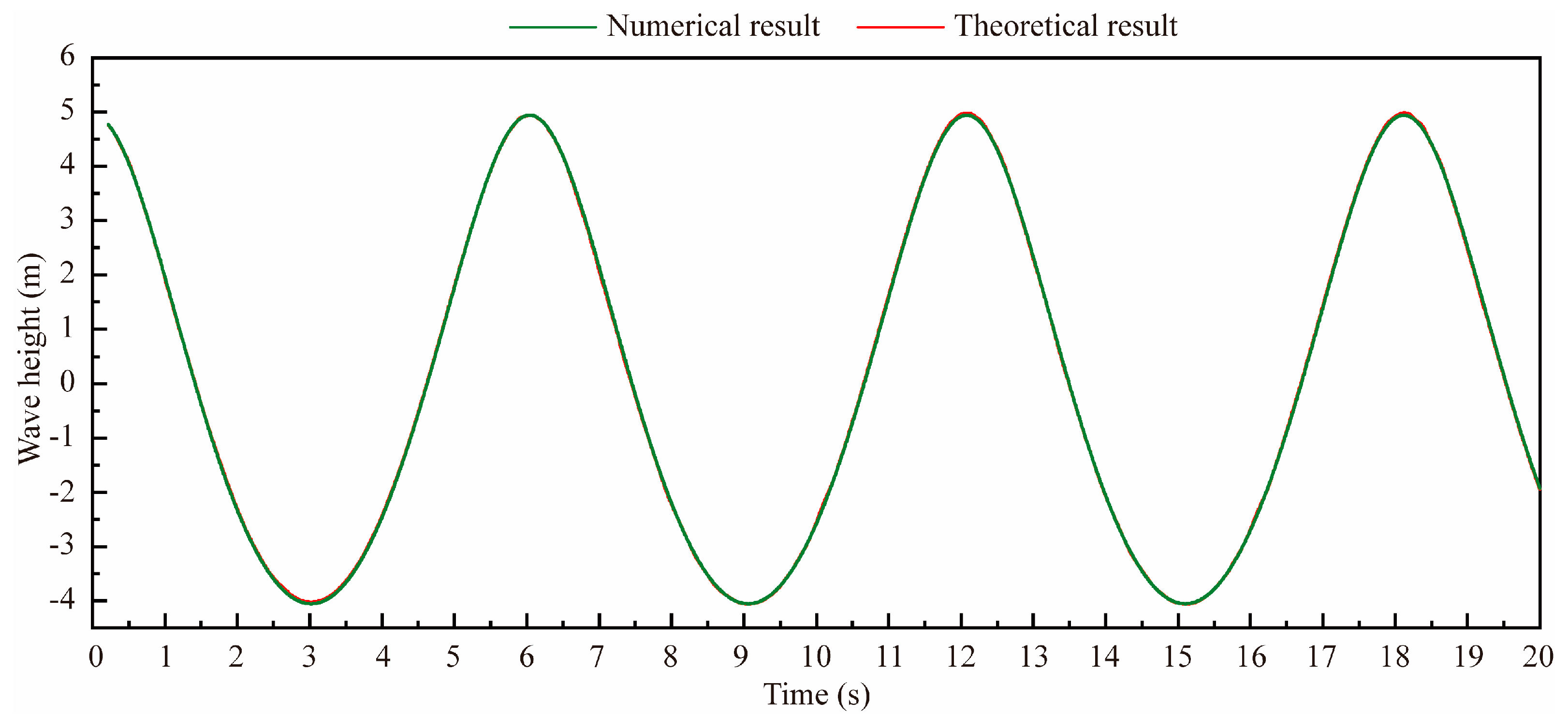
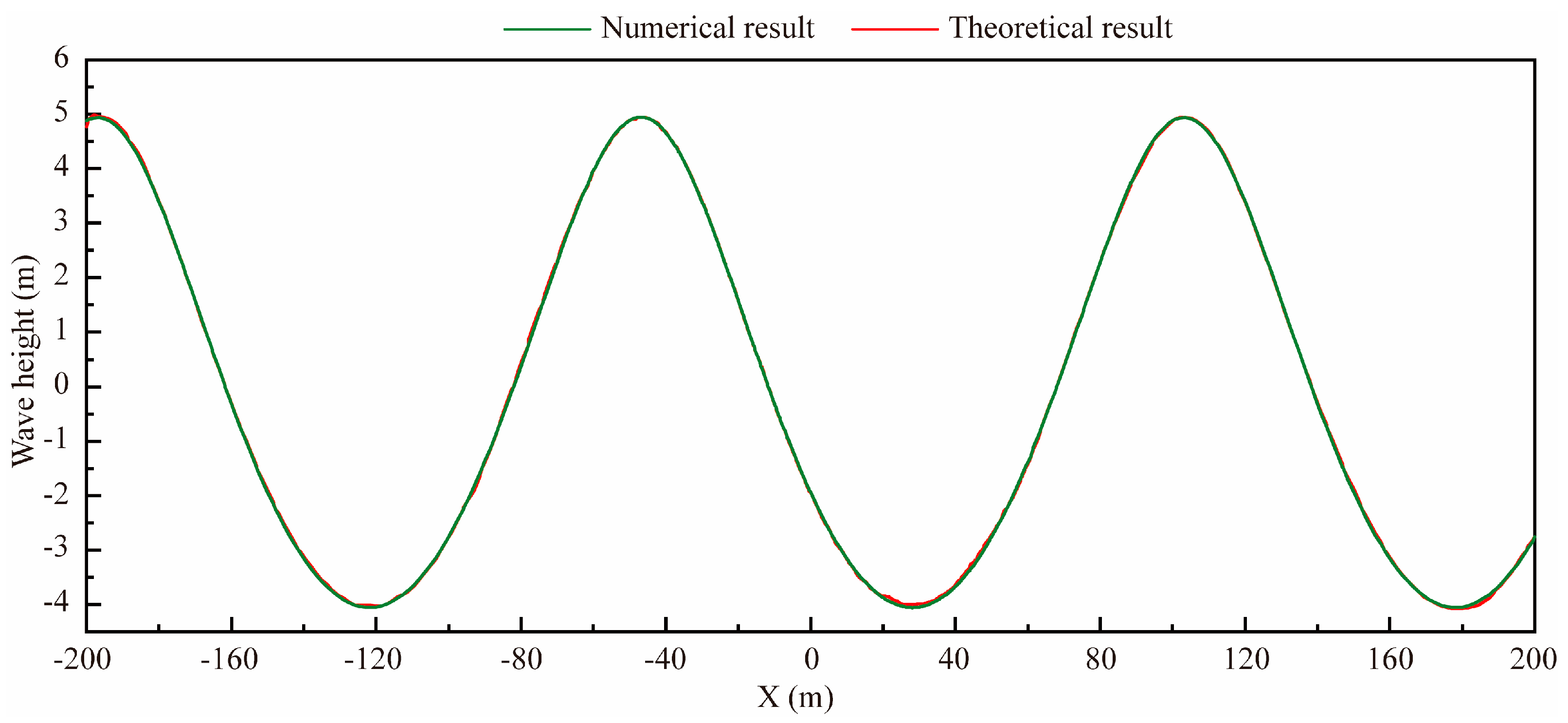
3.2. Numerical Wave Tank Verification
4. Results
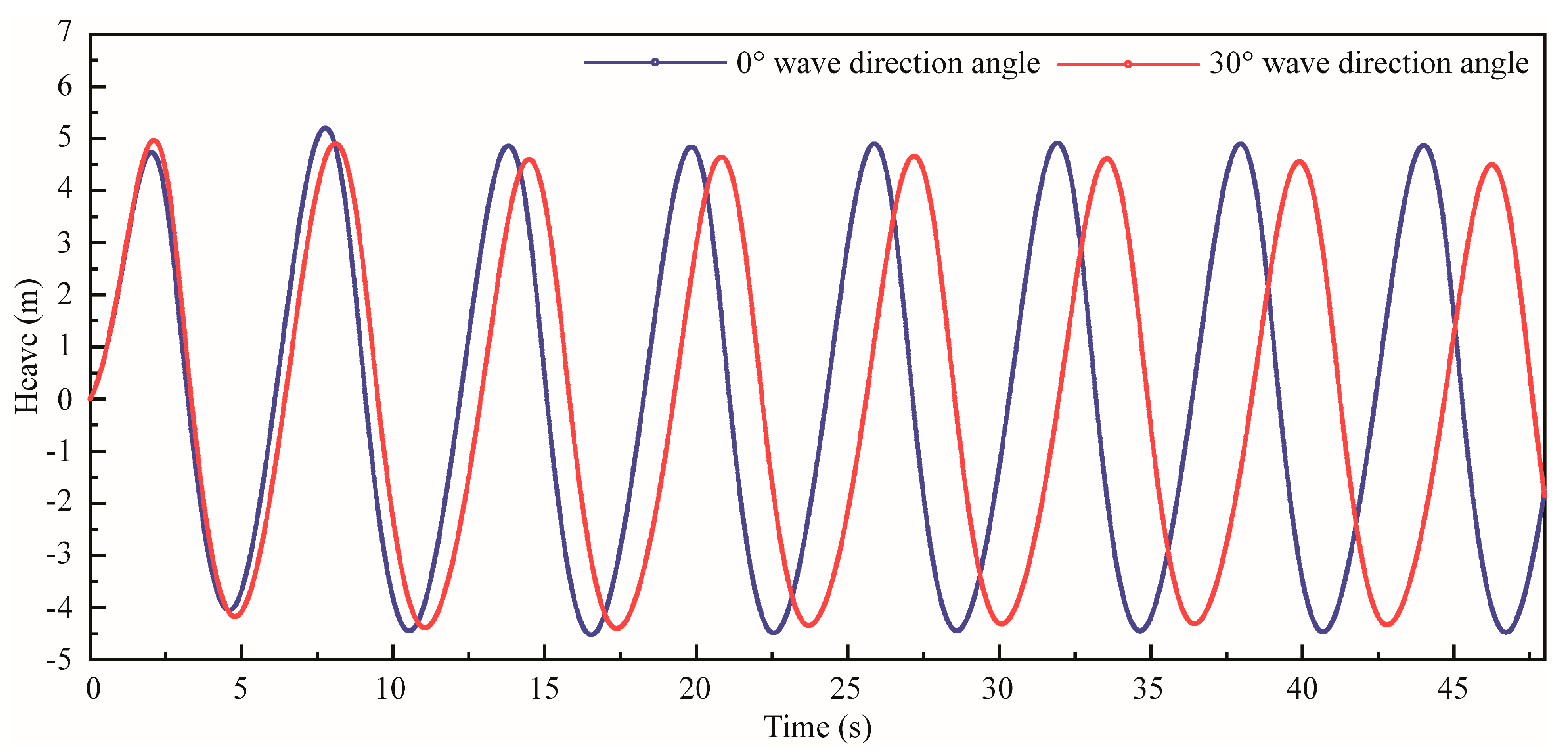
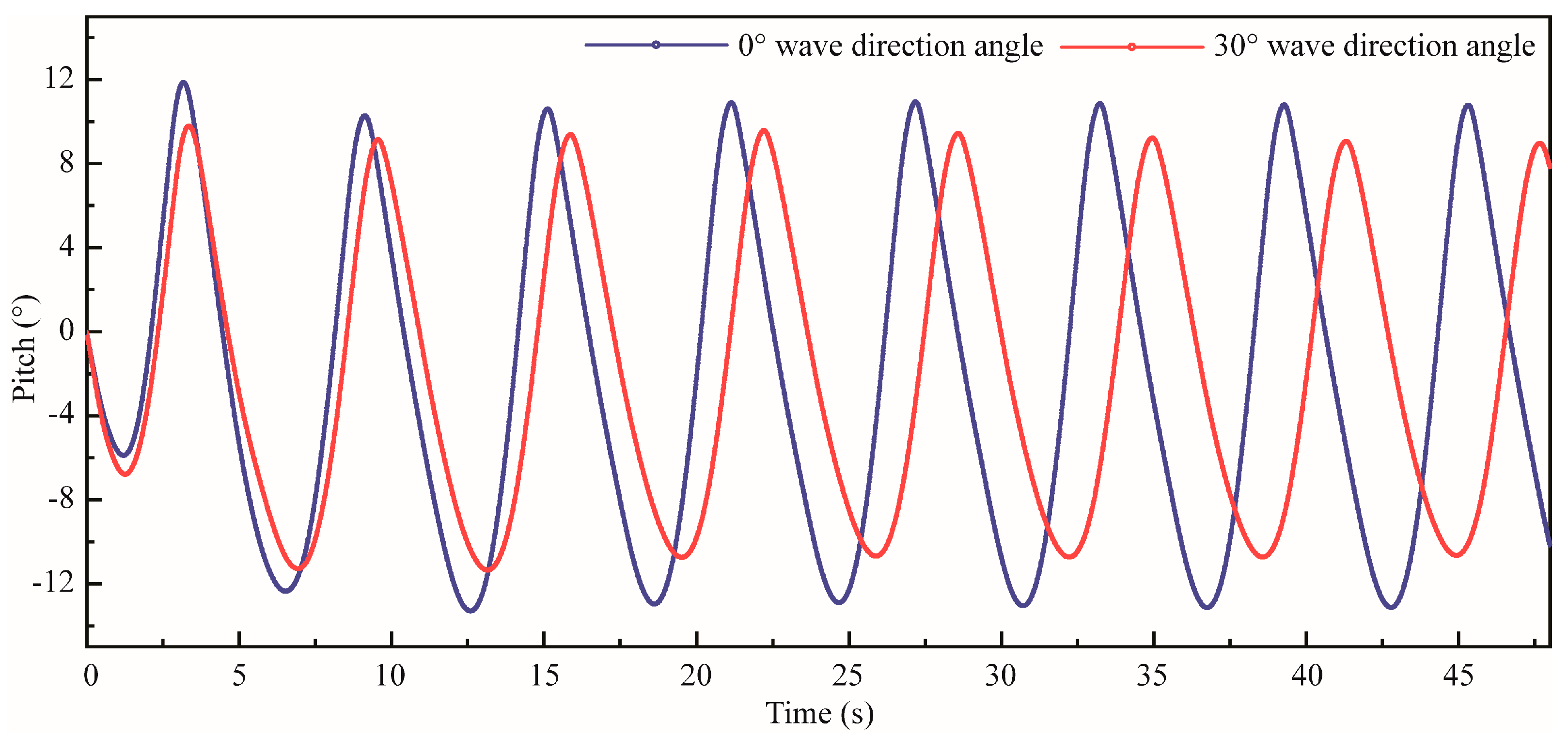
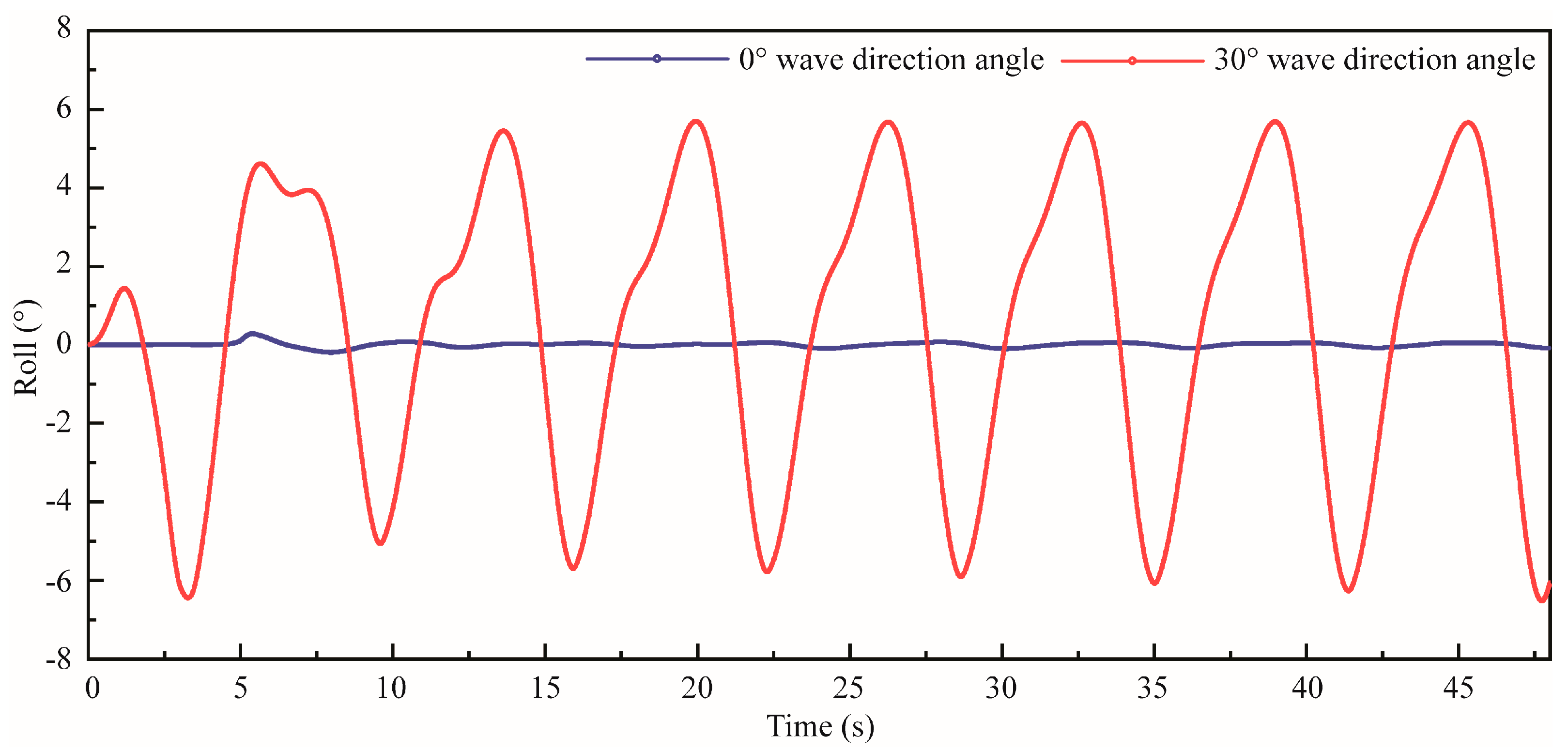
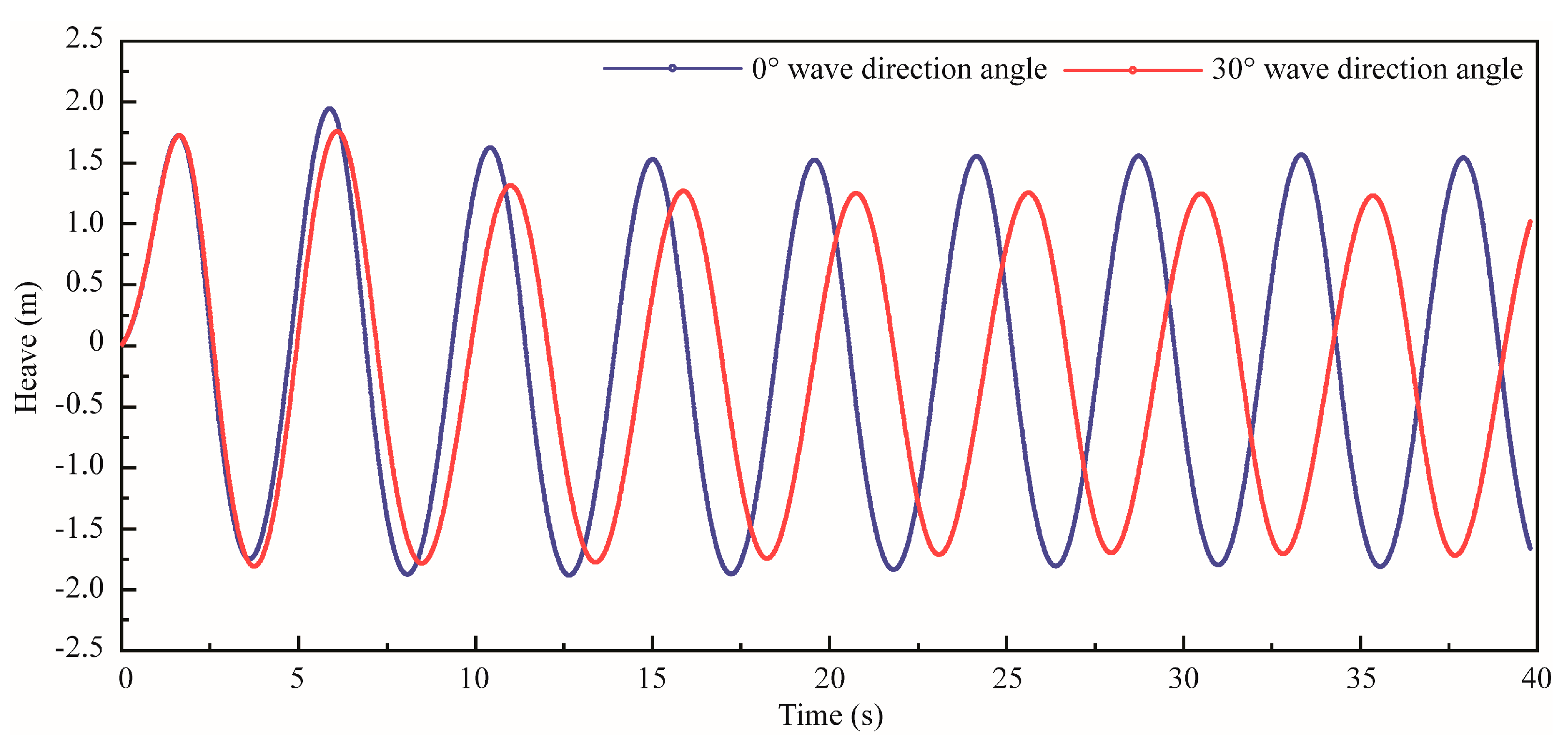
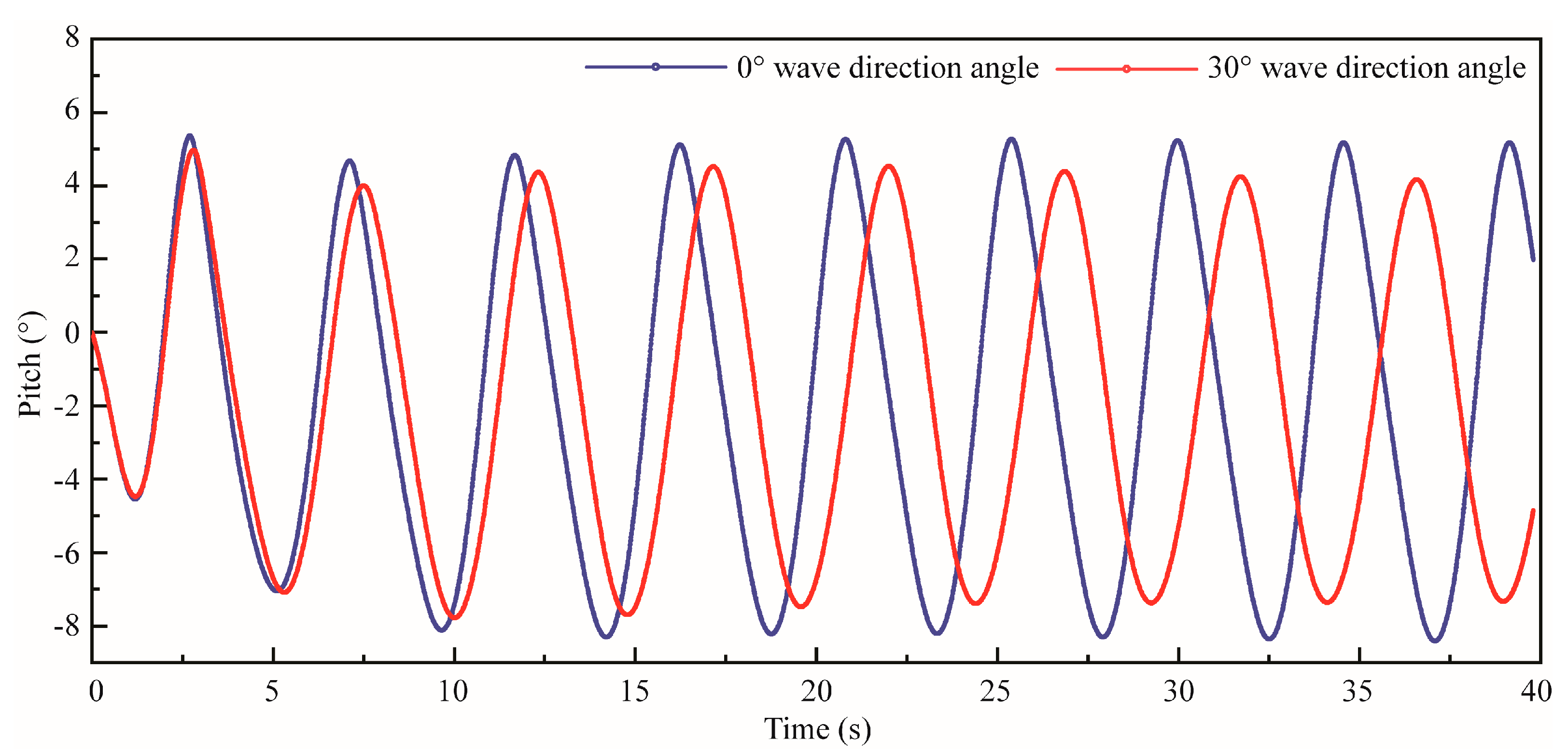
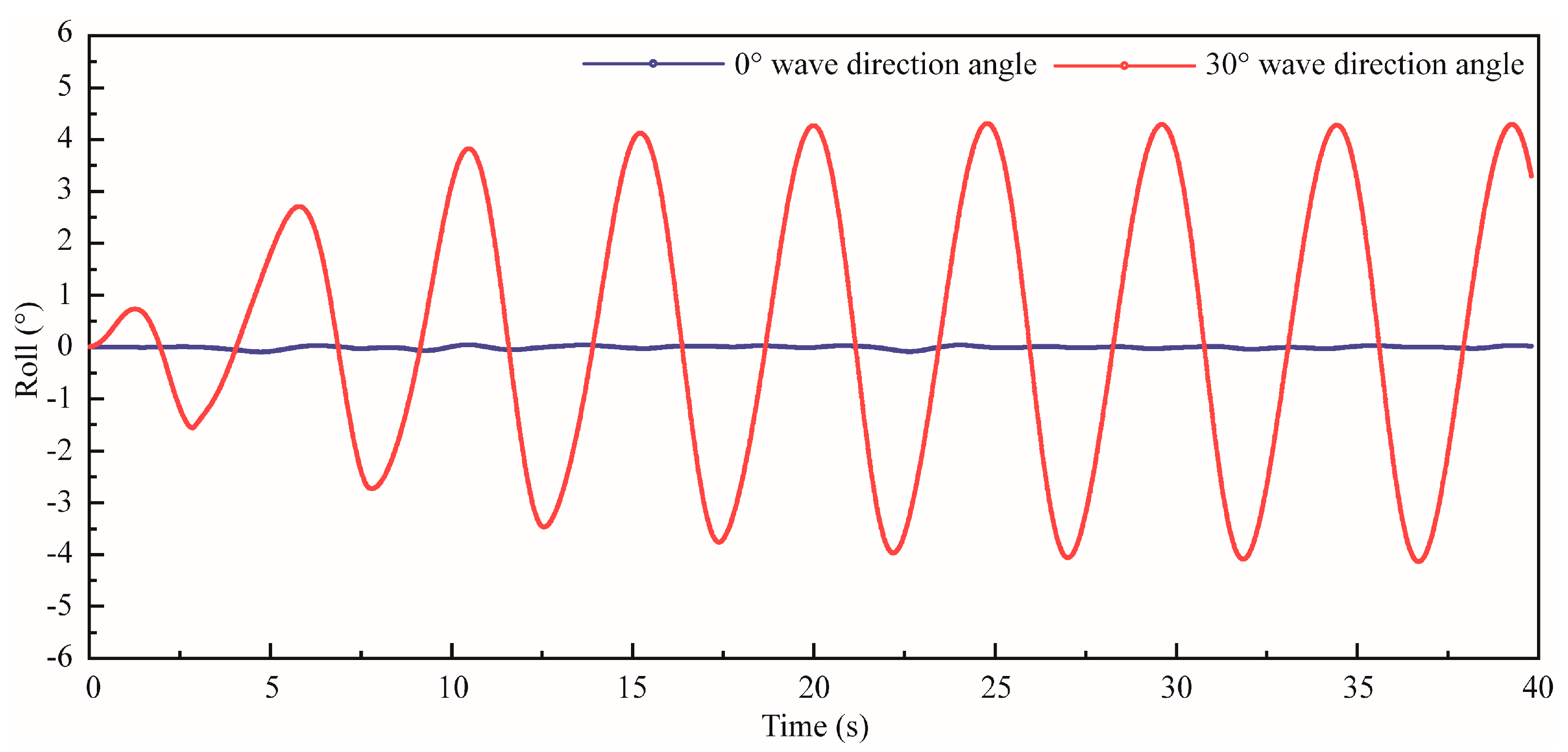
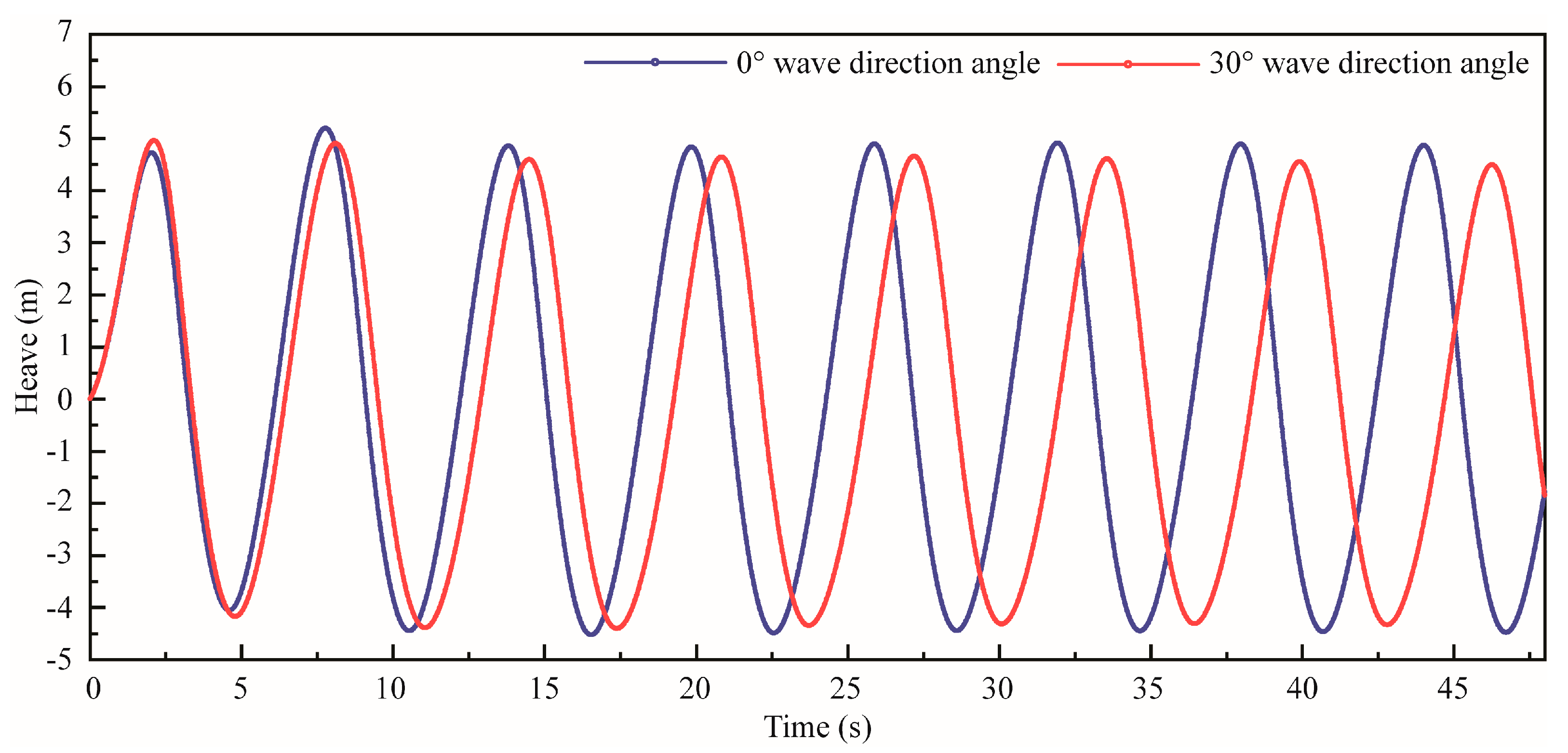
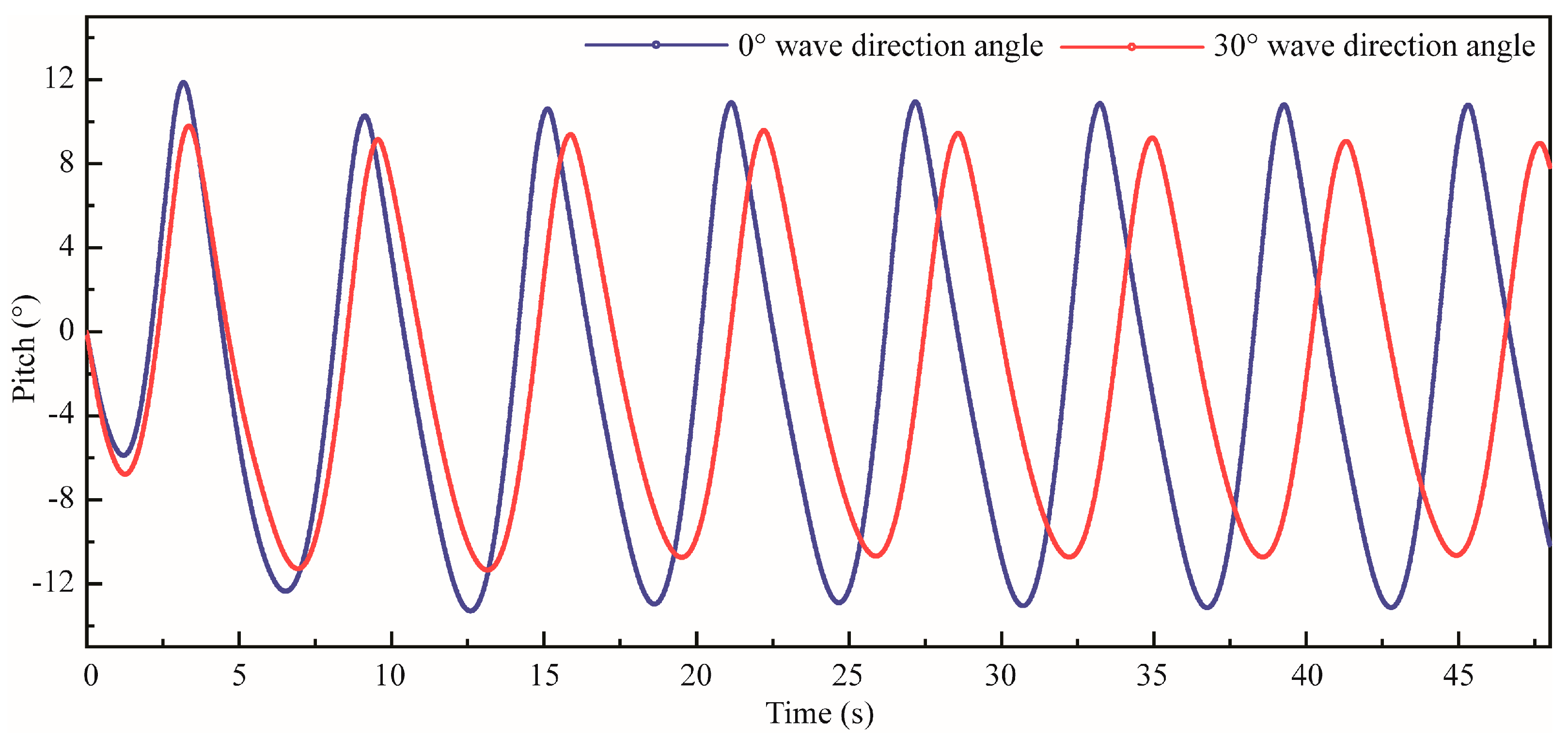
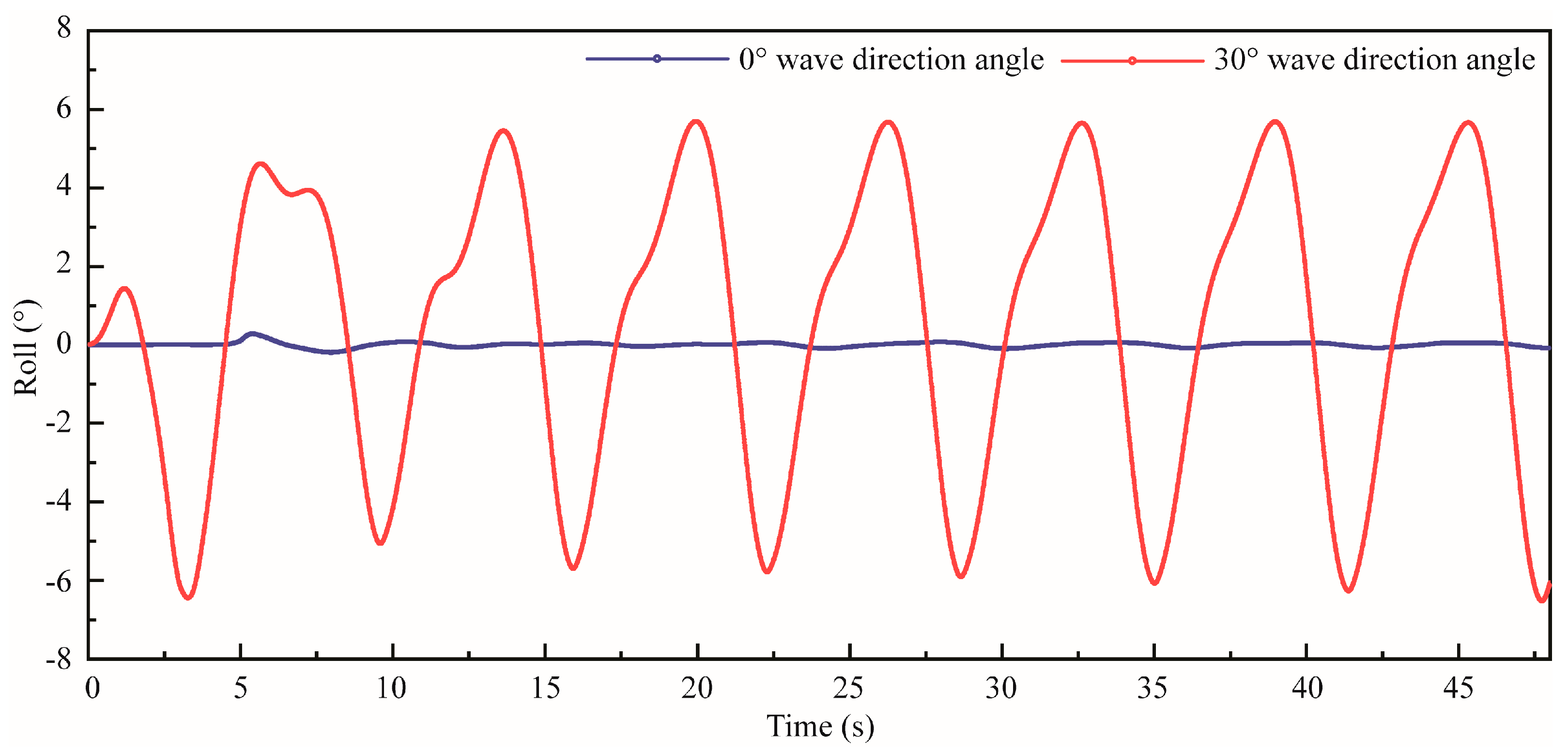
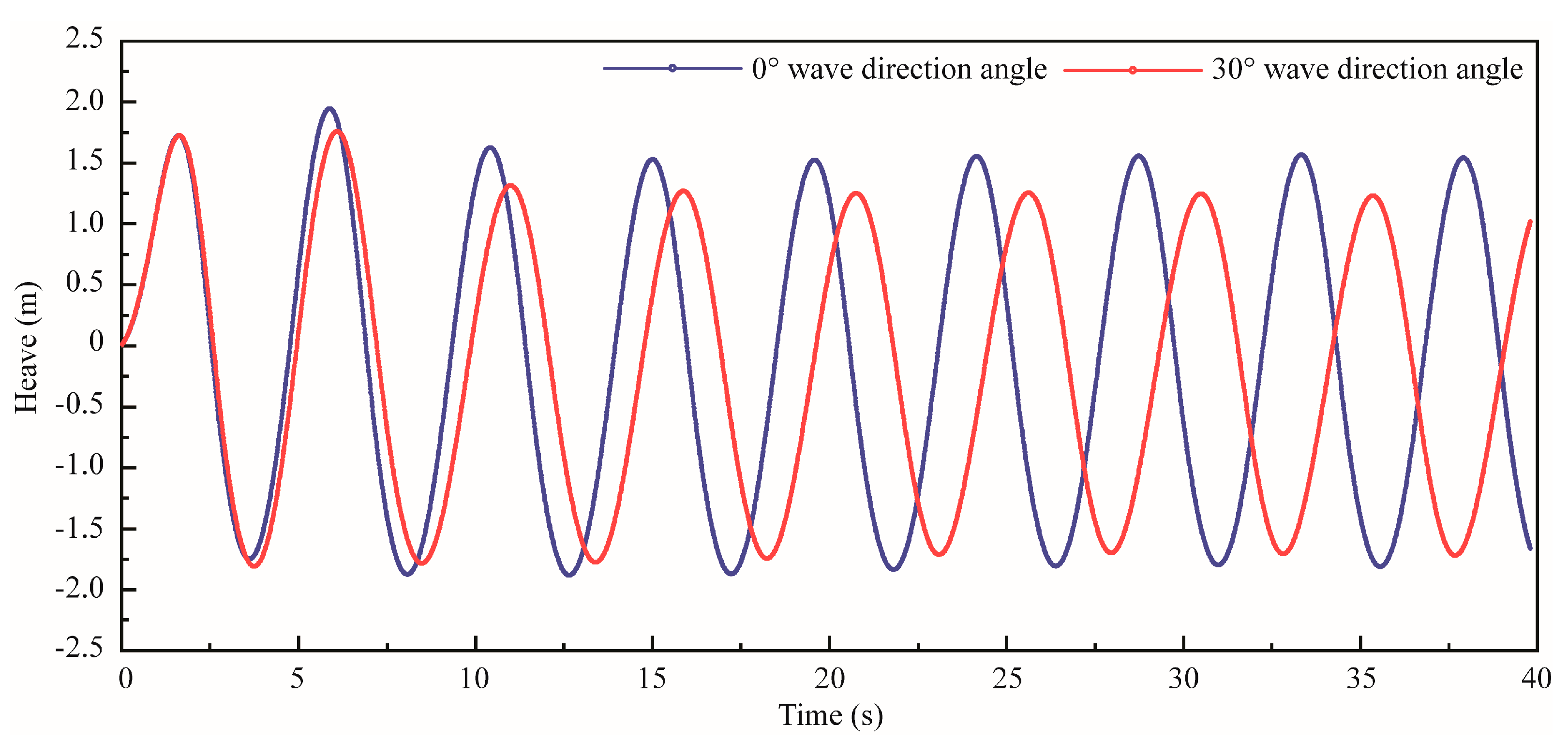
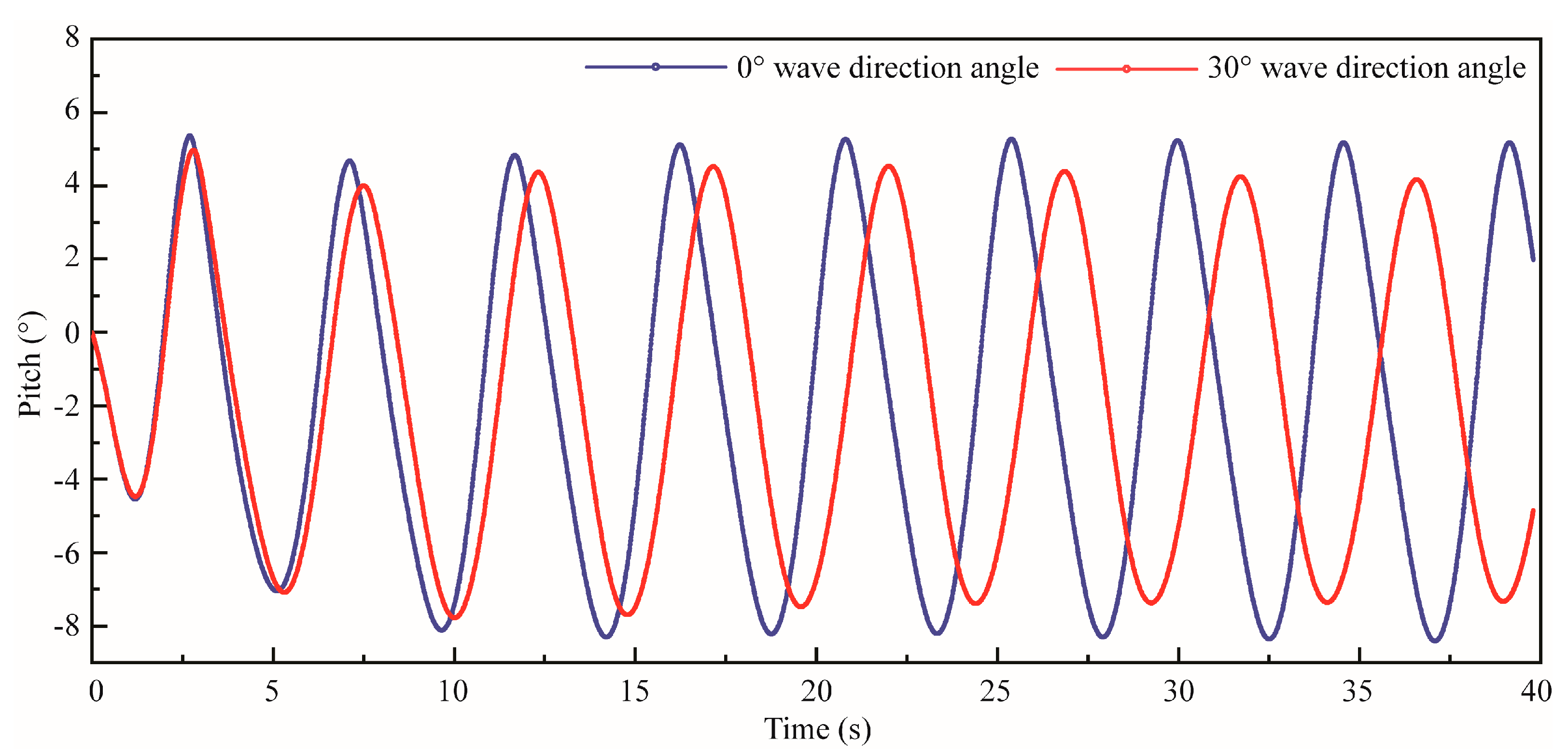
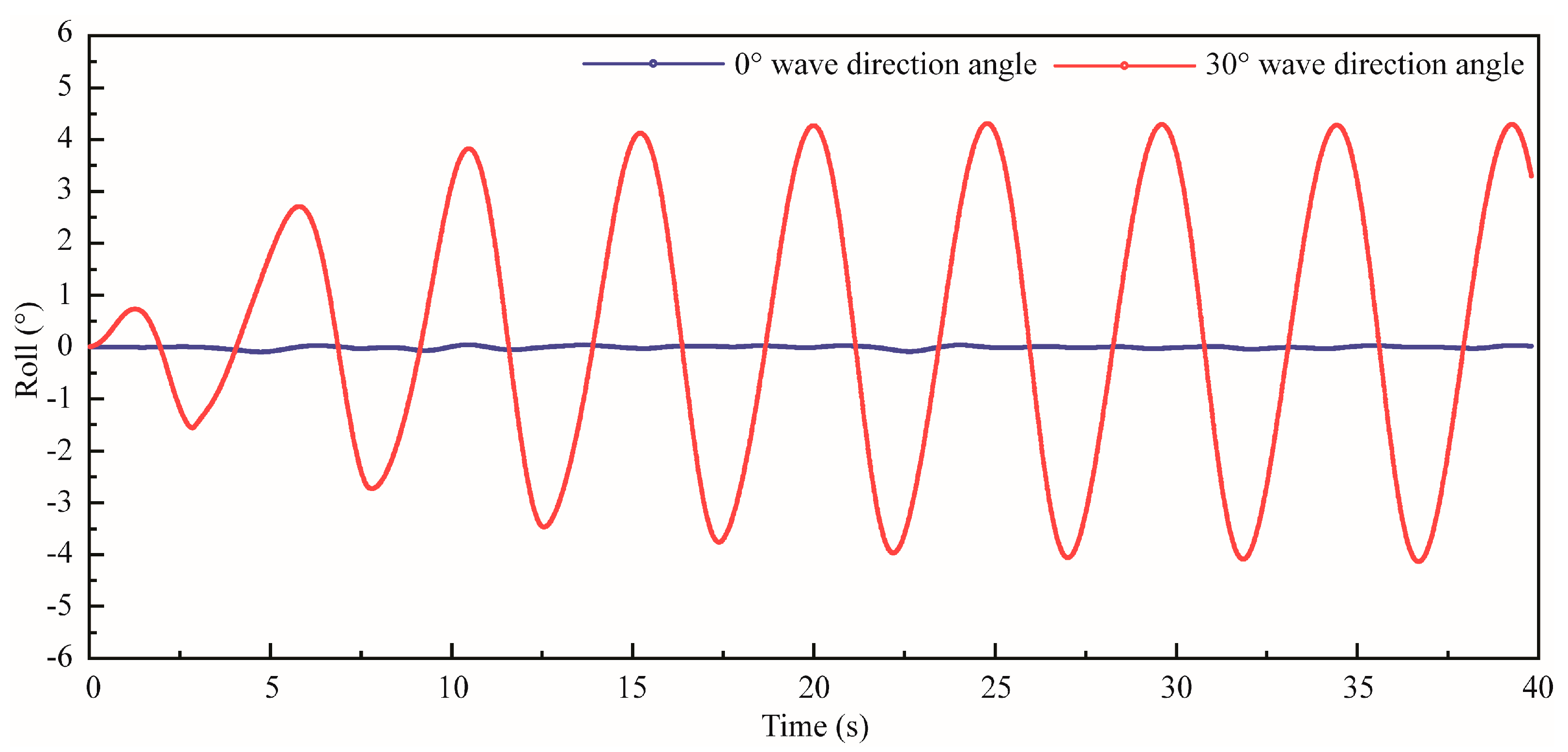
4.1. Six Degrees of Freedom Motion with Time History
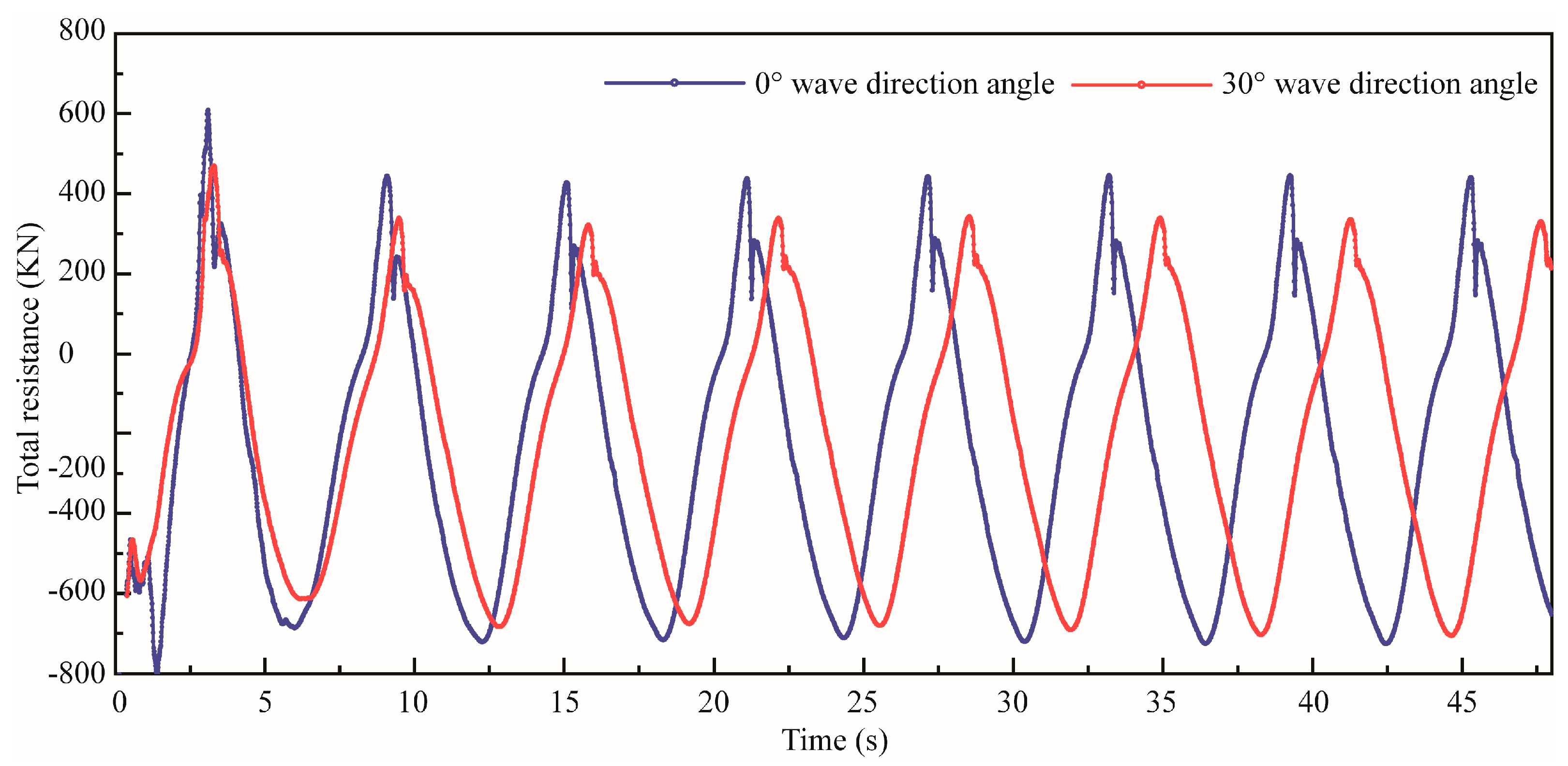
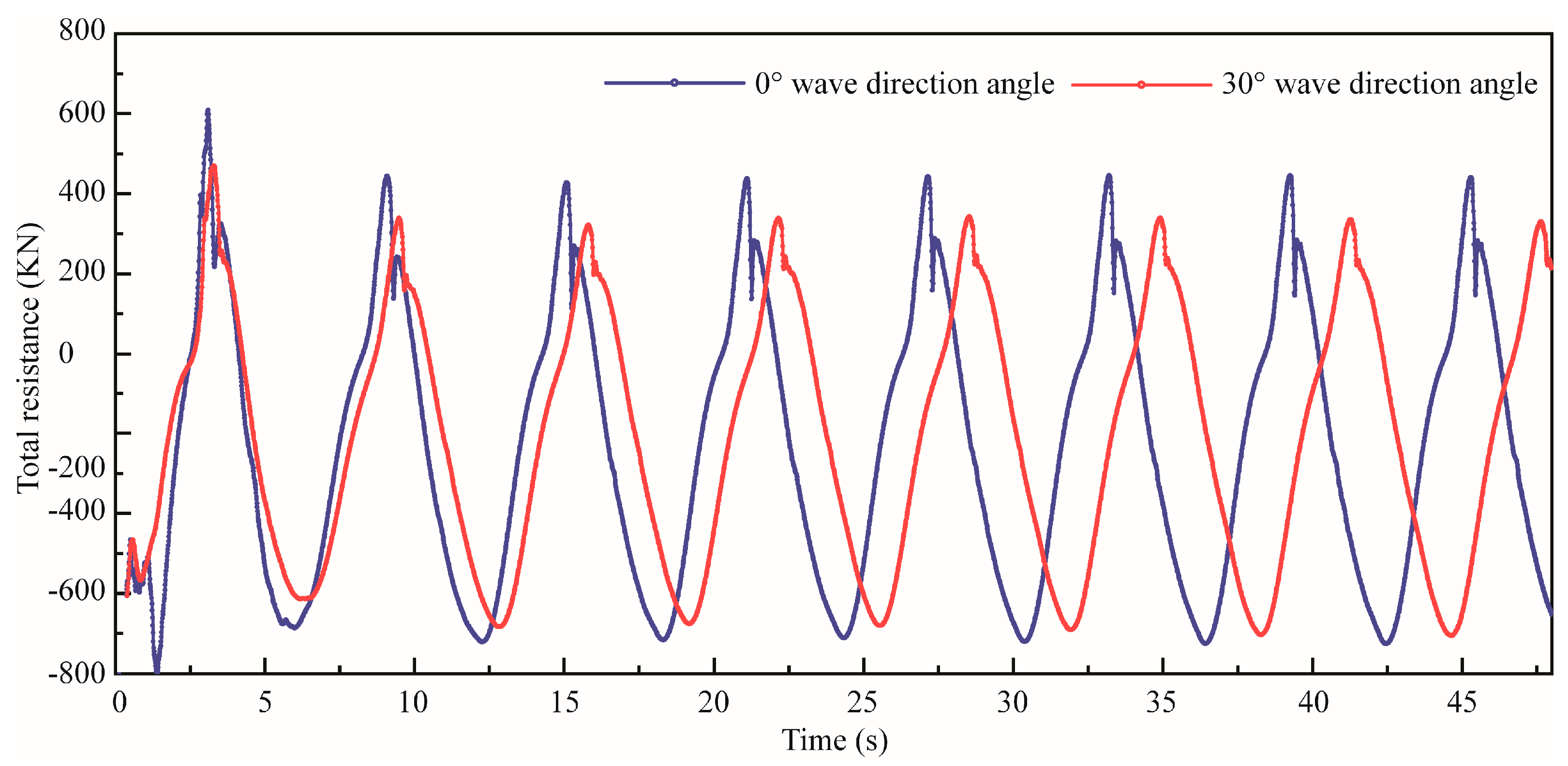
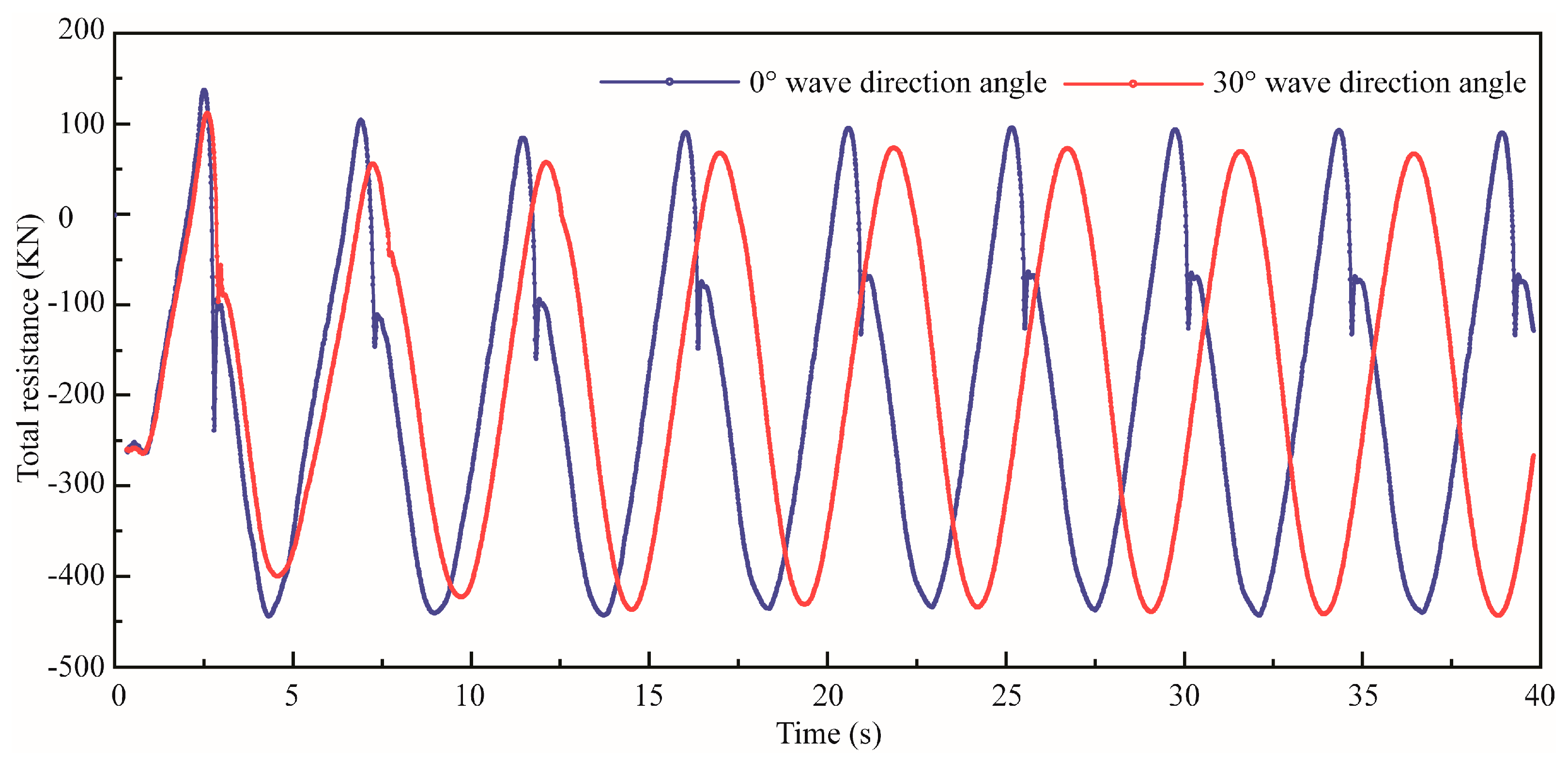
4.2. Resistance
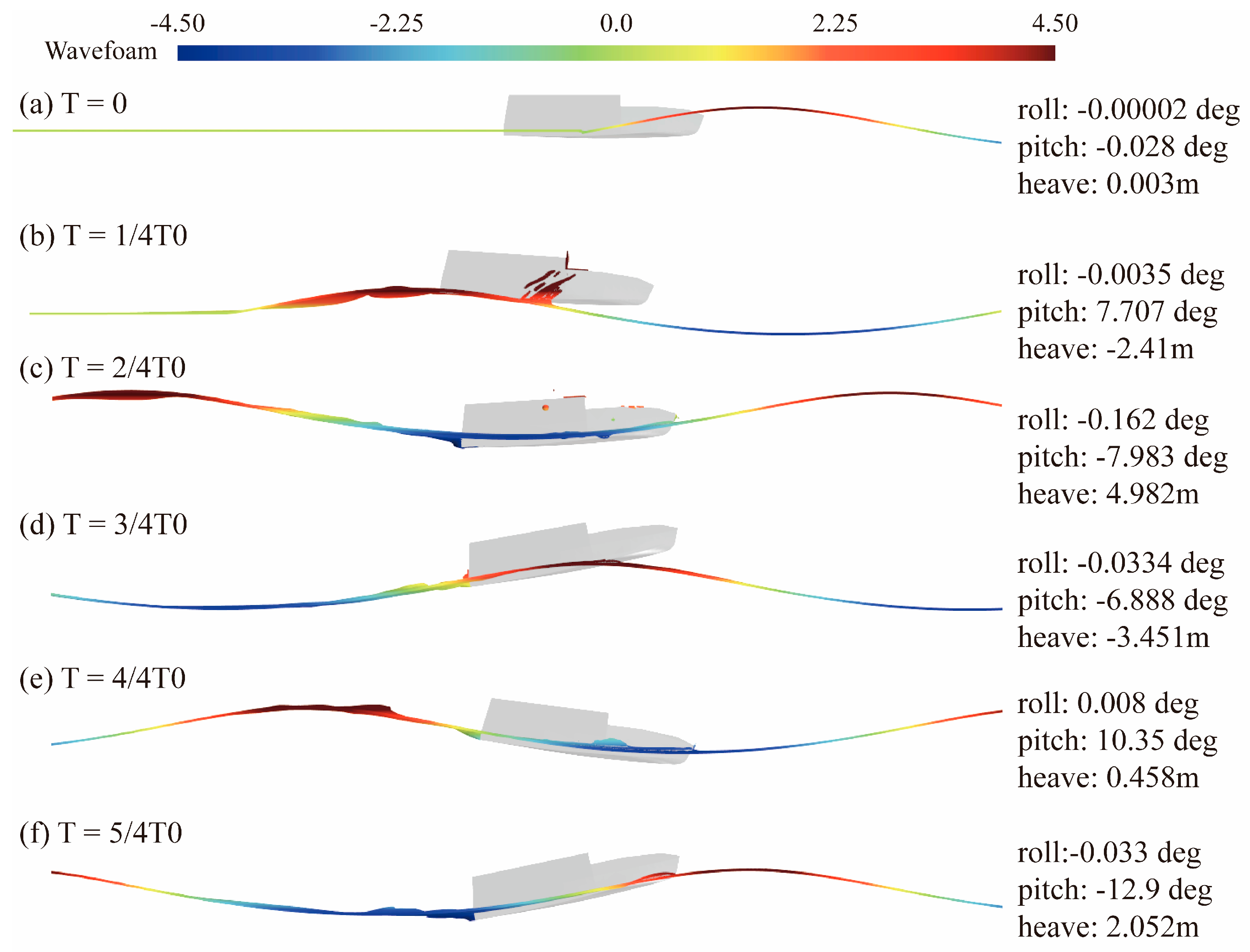
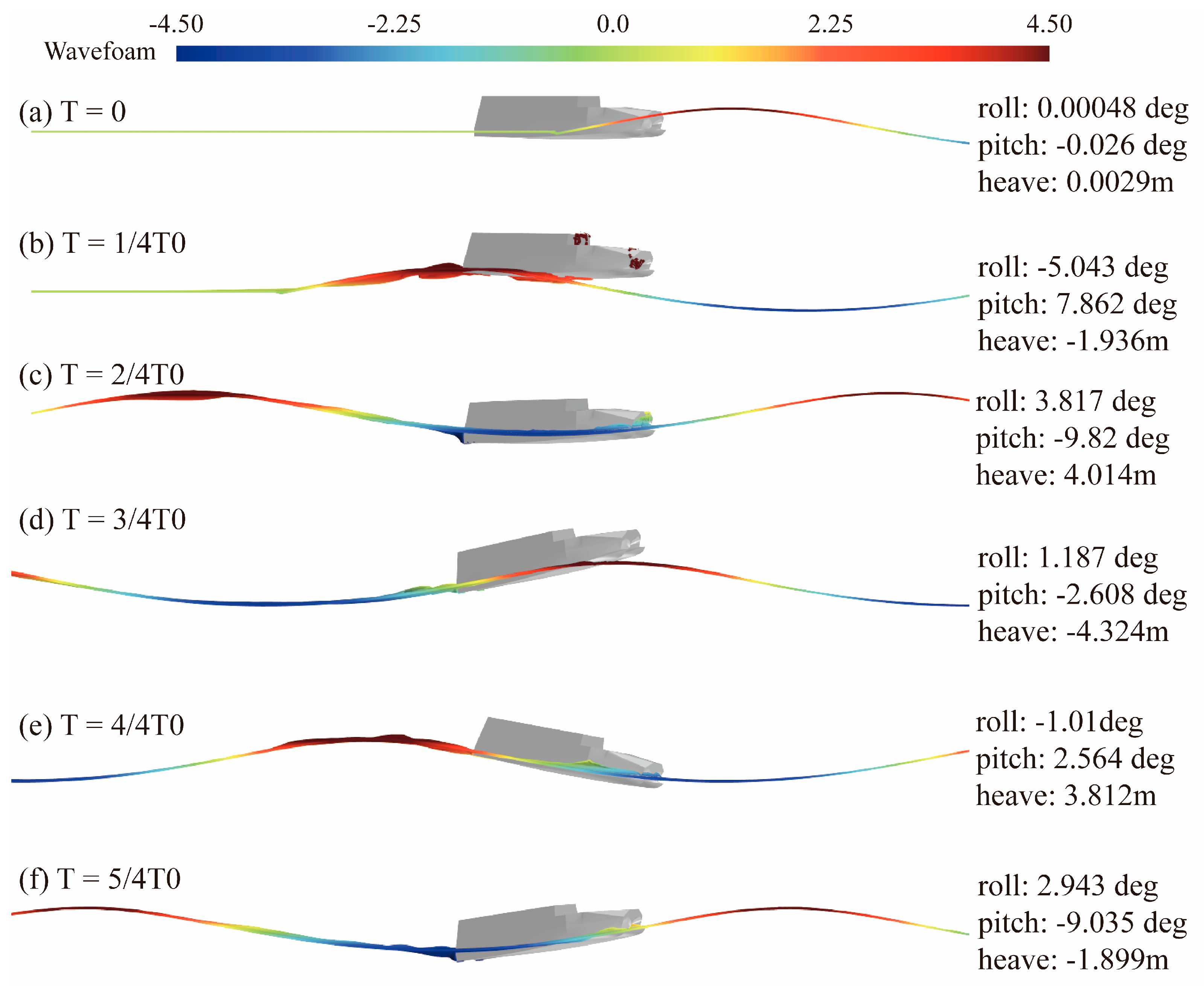
4.3. The Attitude of USV in Waves at Typical Times under 7 Level Sea State
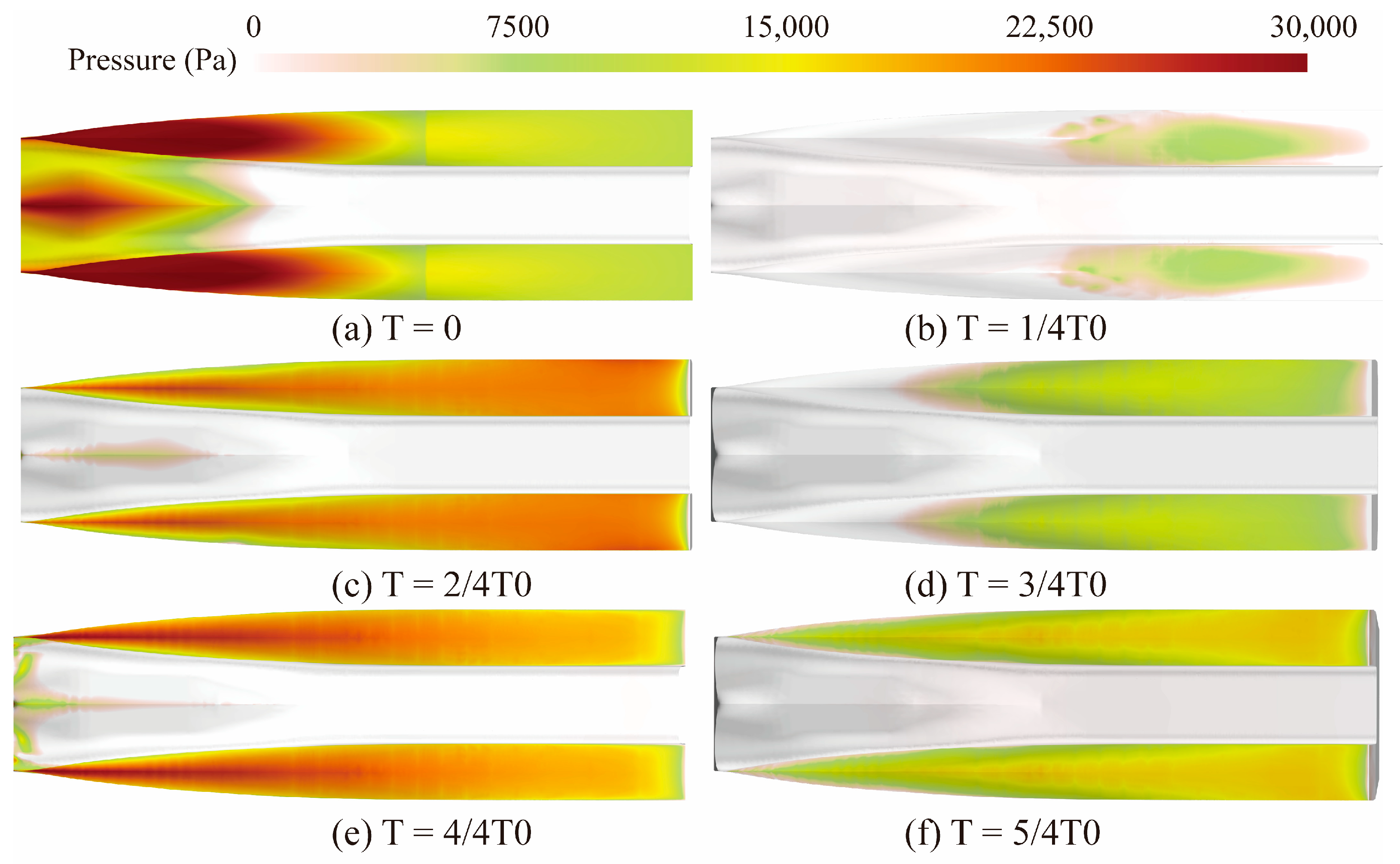
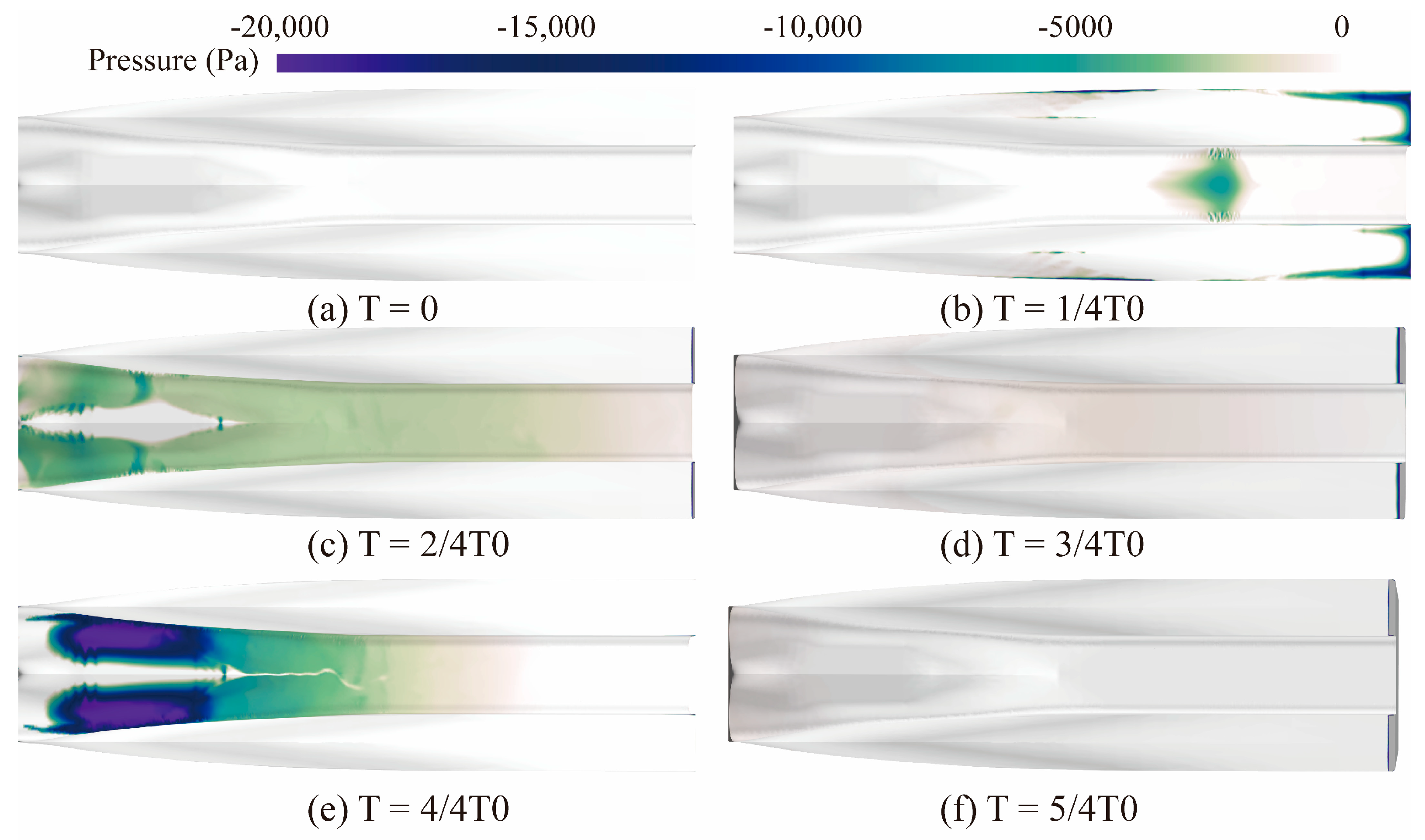
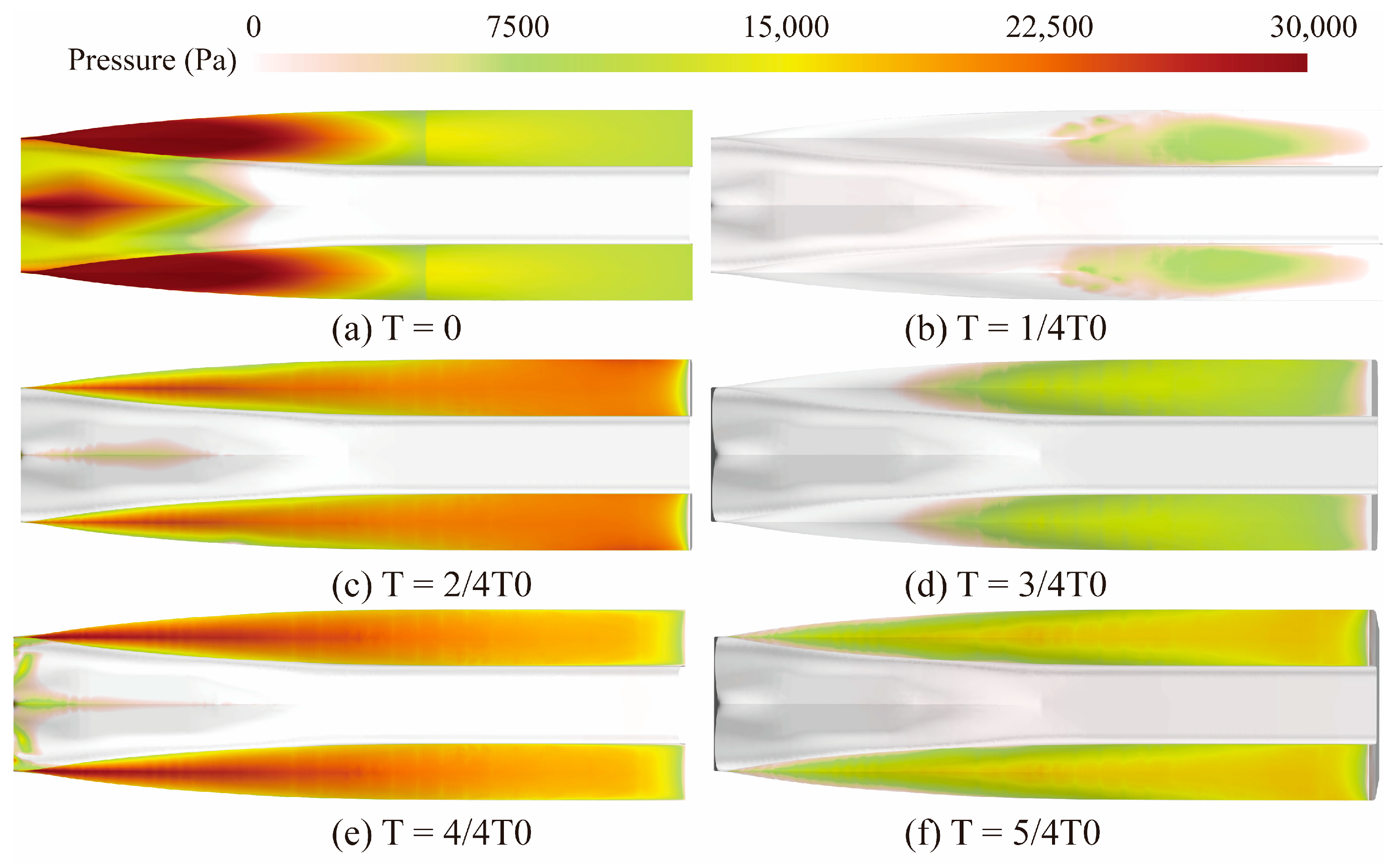
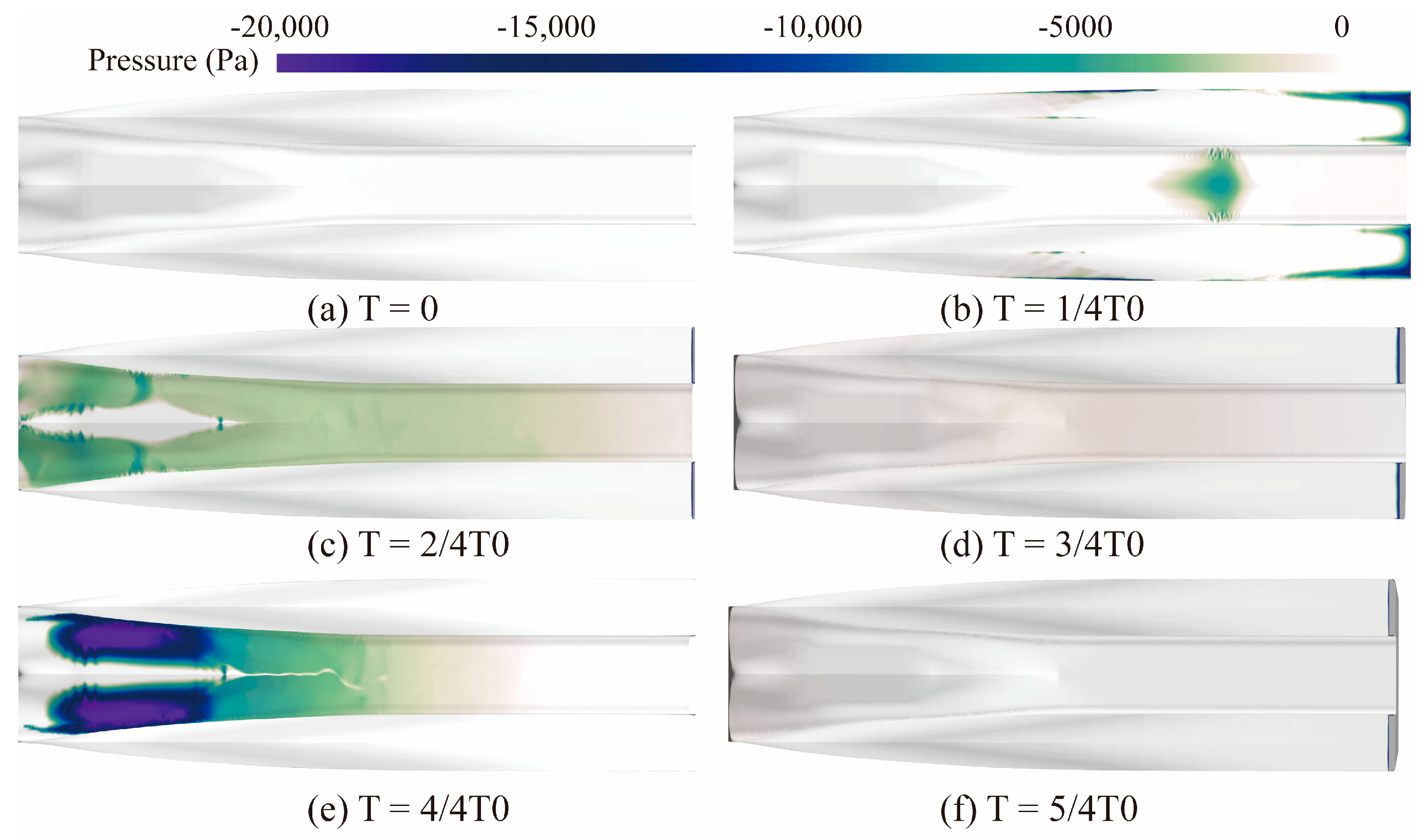
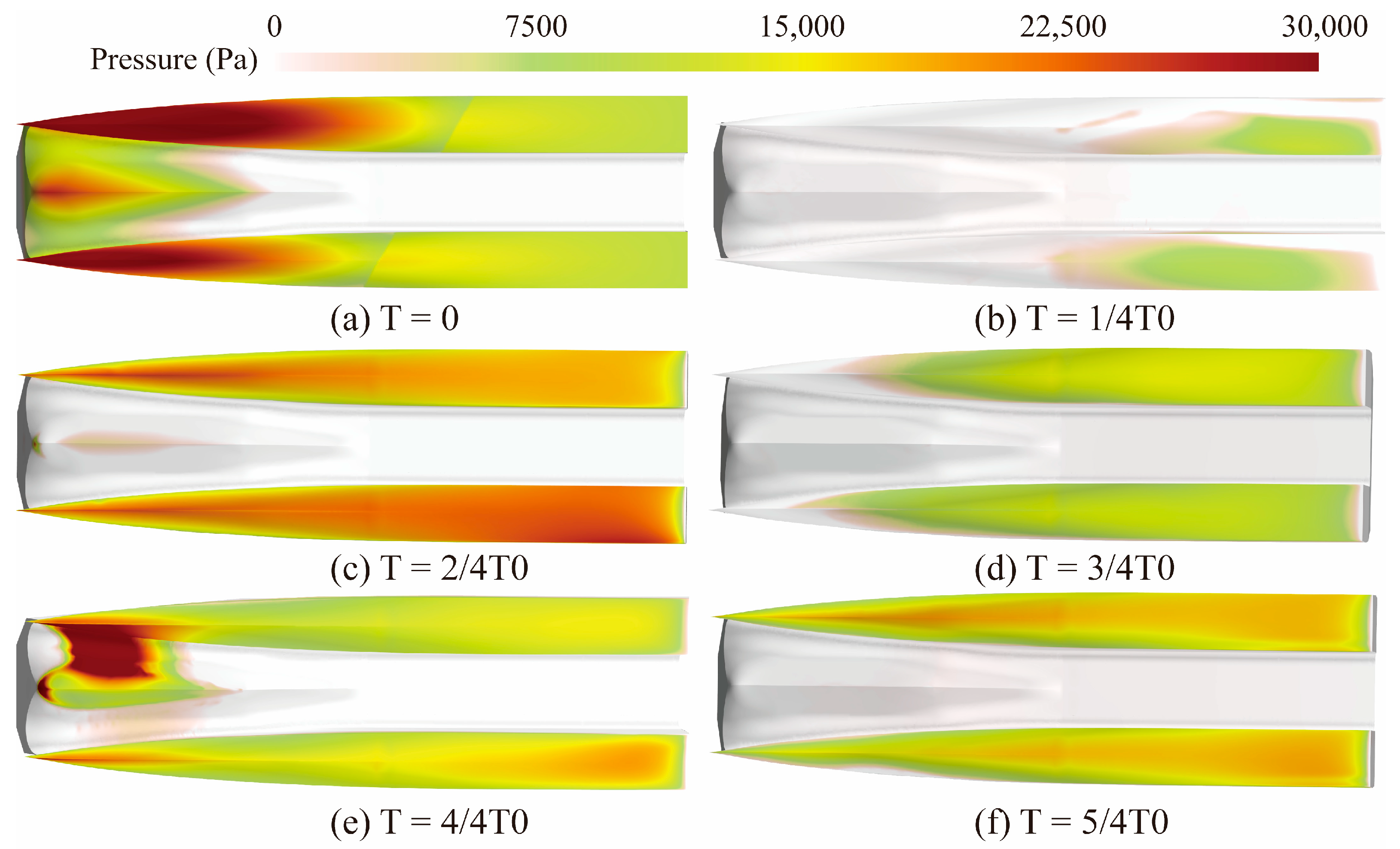
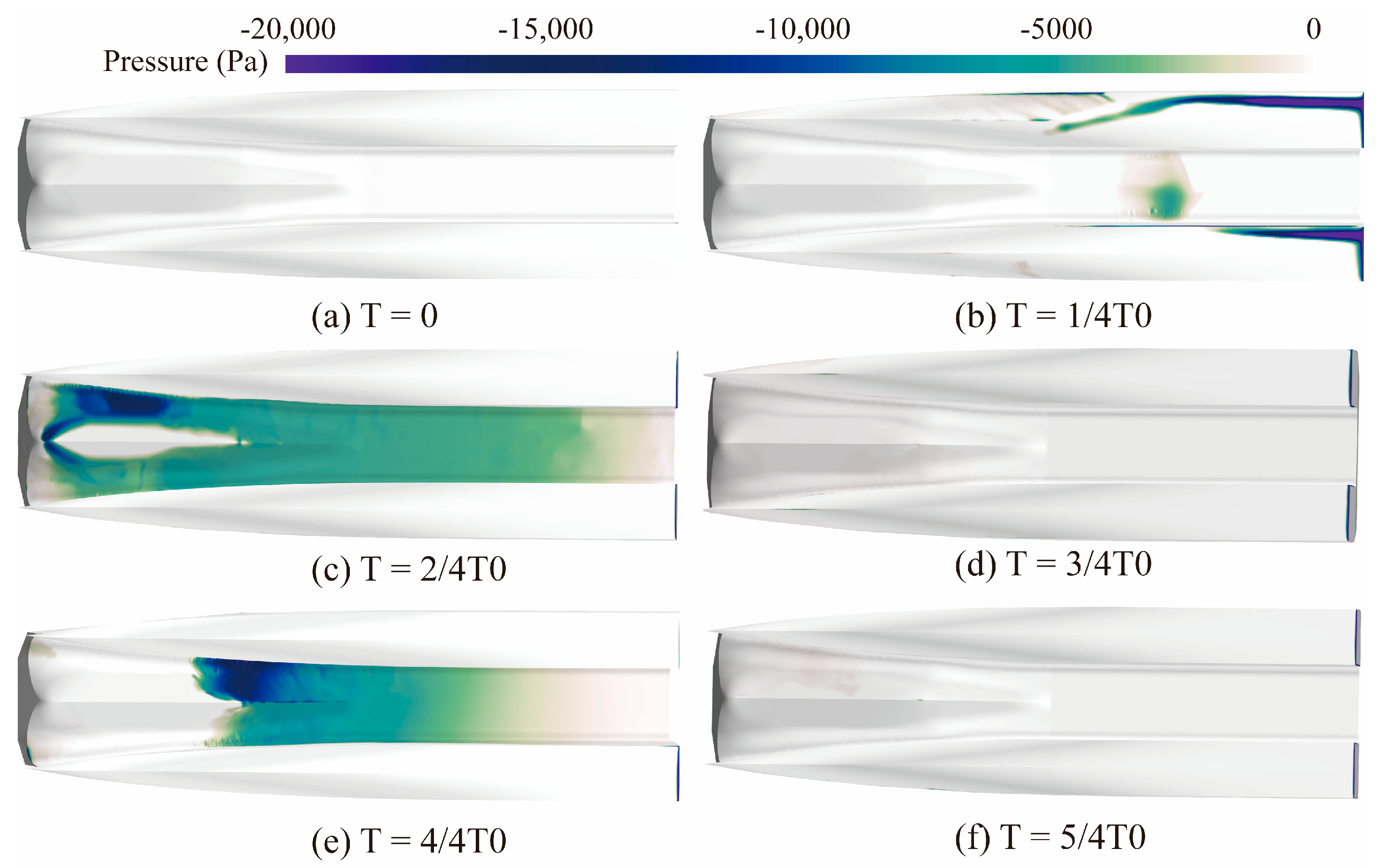
4.4. Pressure Distribution at the Bottom of the USV at Typical Times under 7 Level Sea State
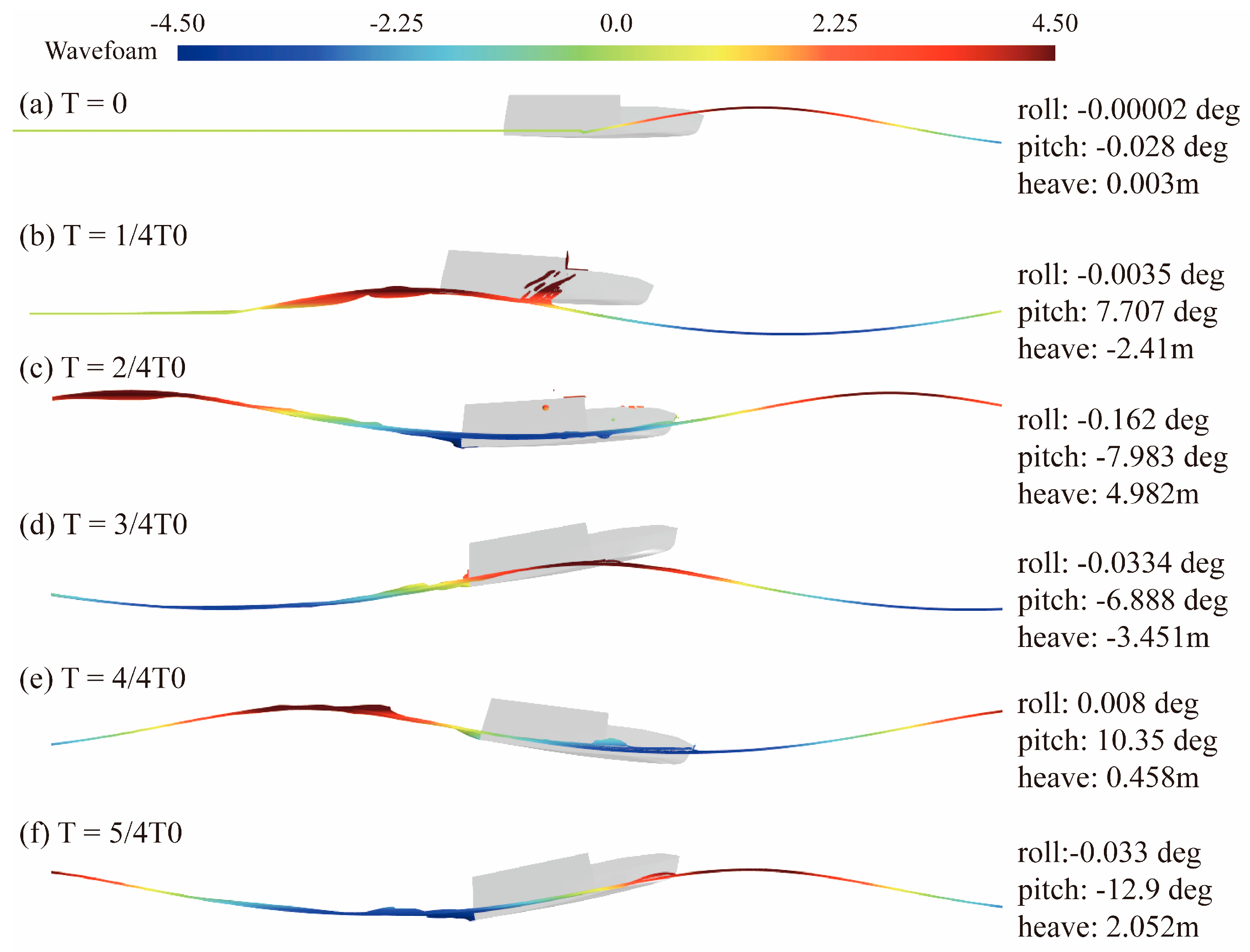
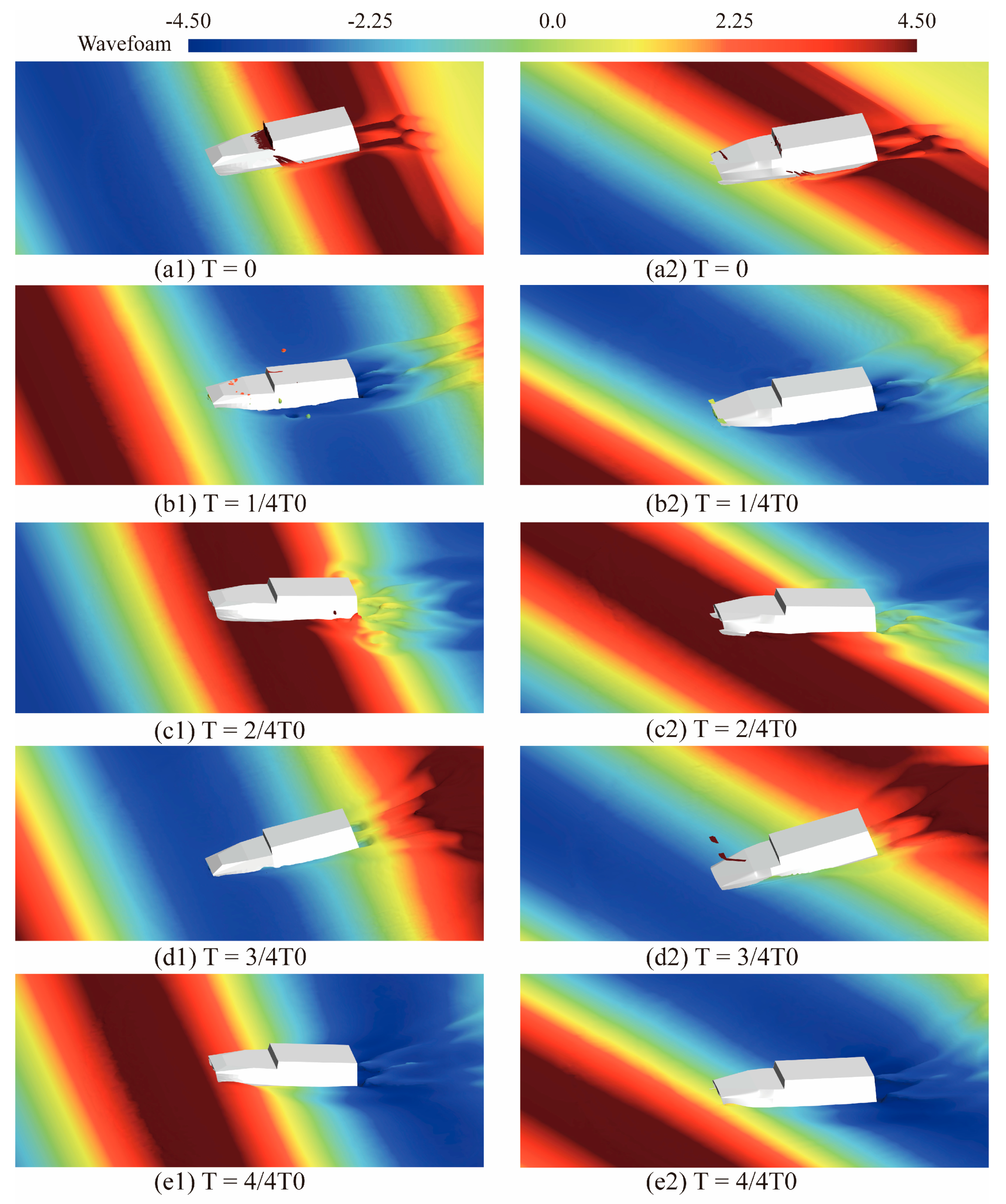
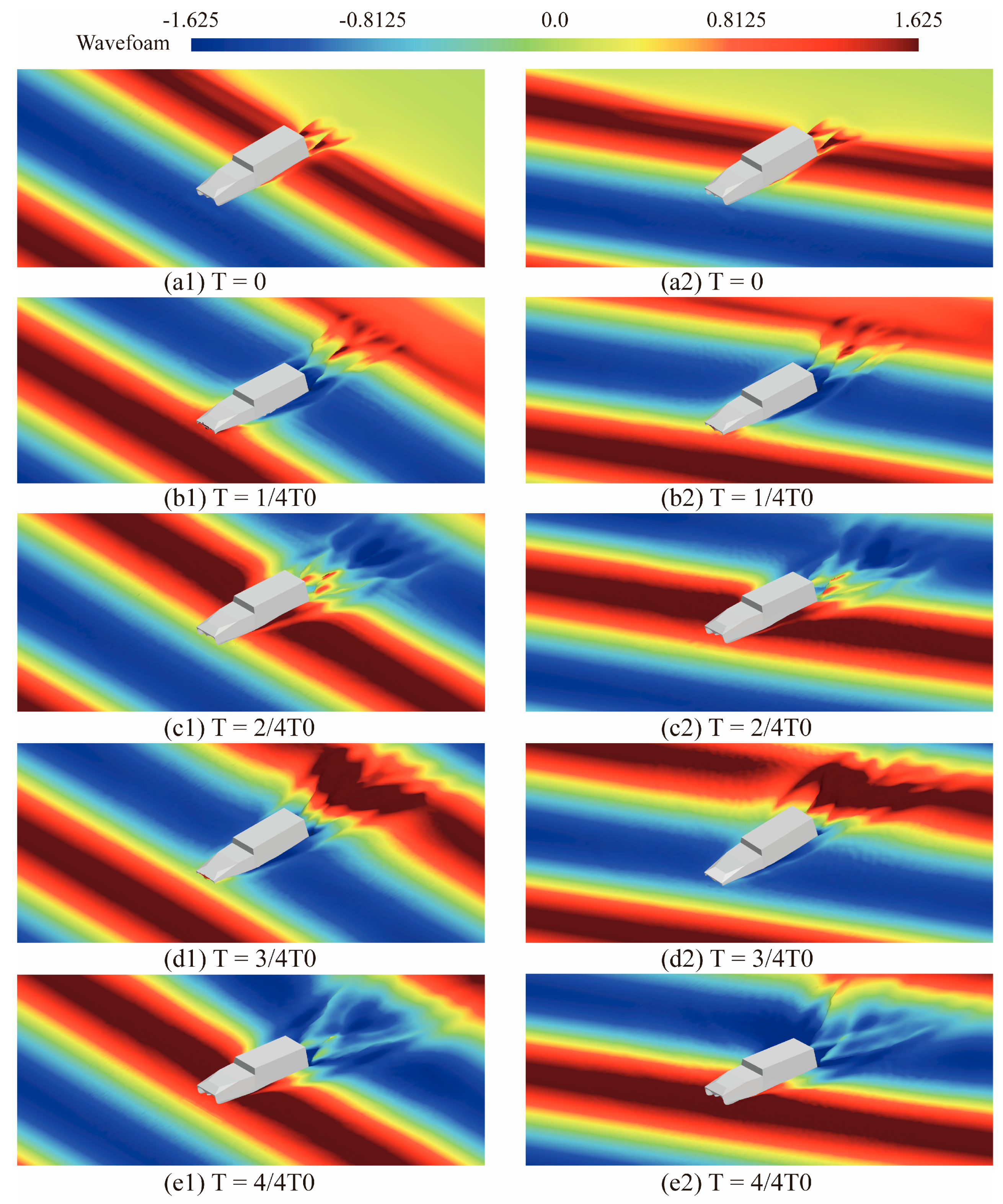
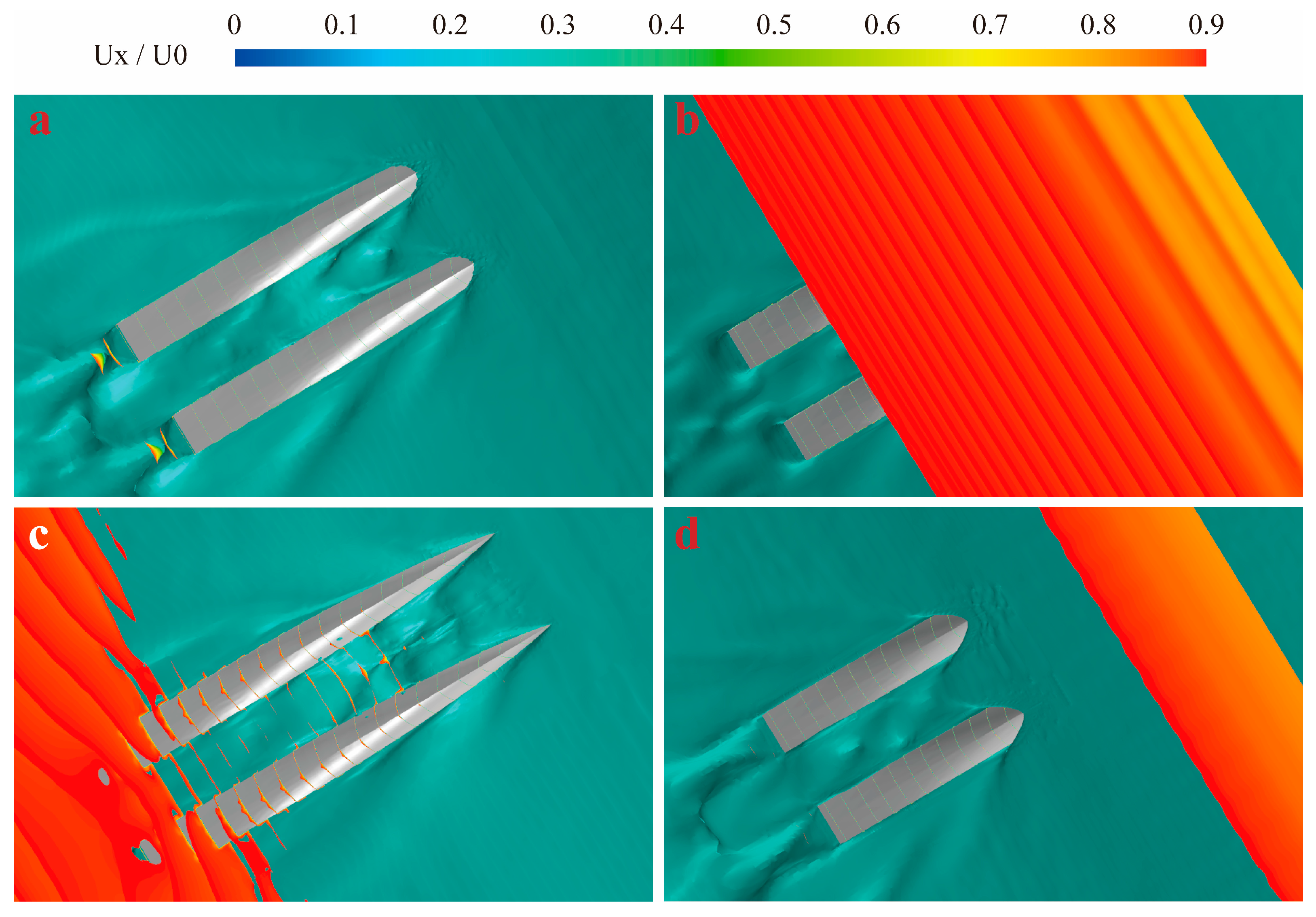
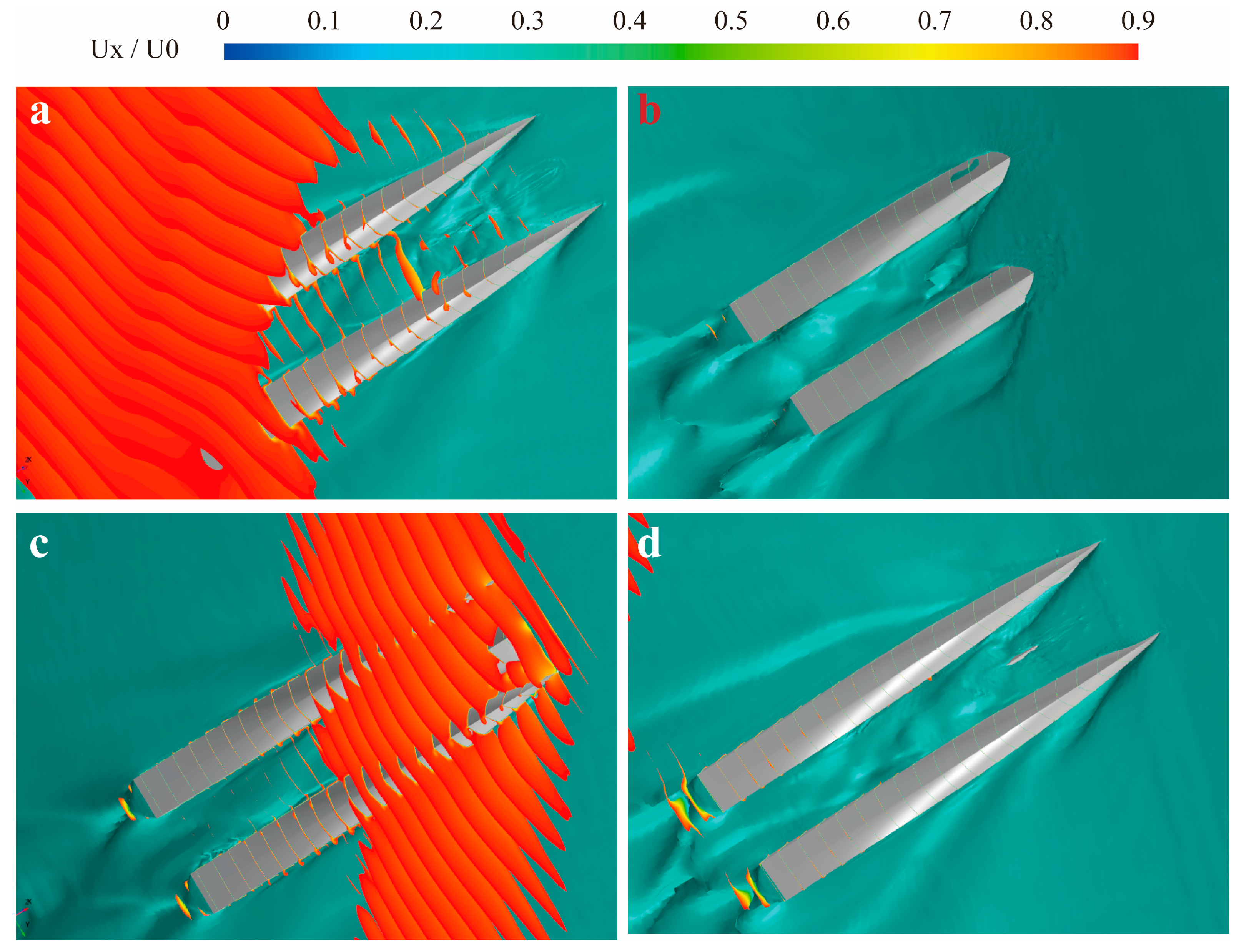
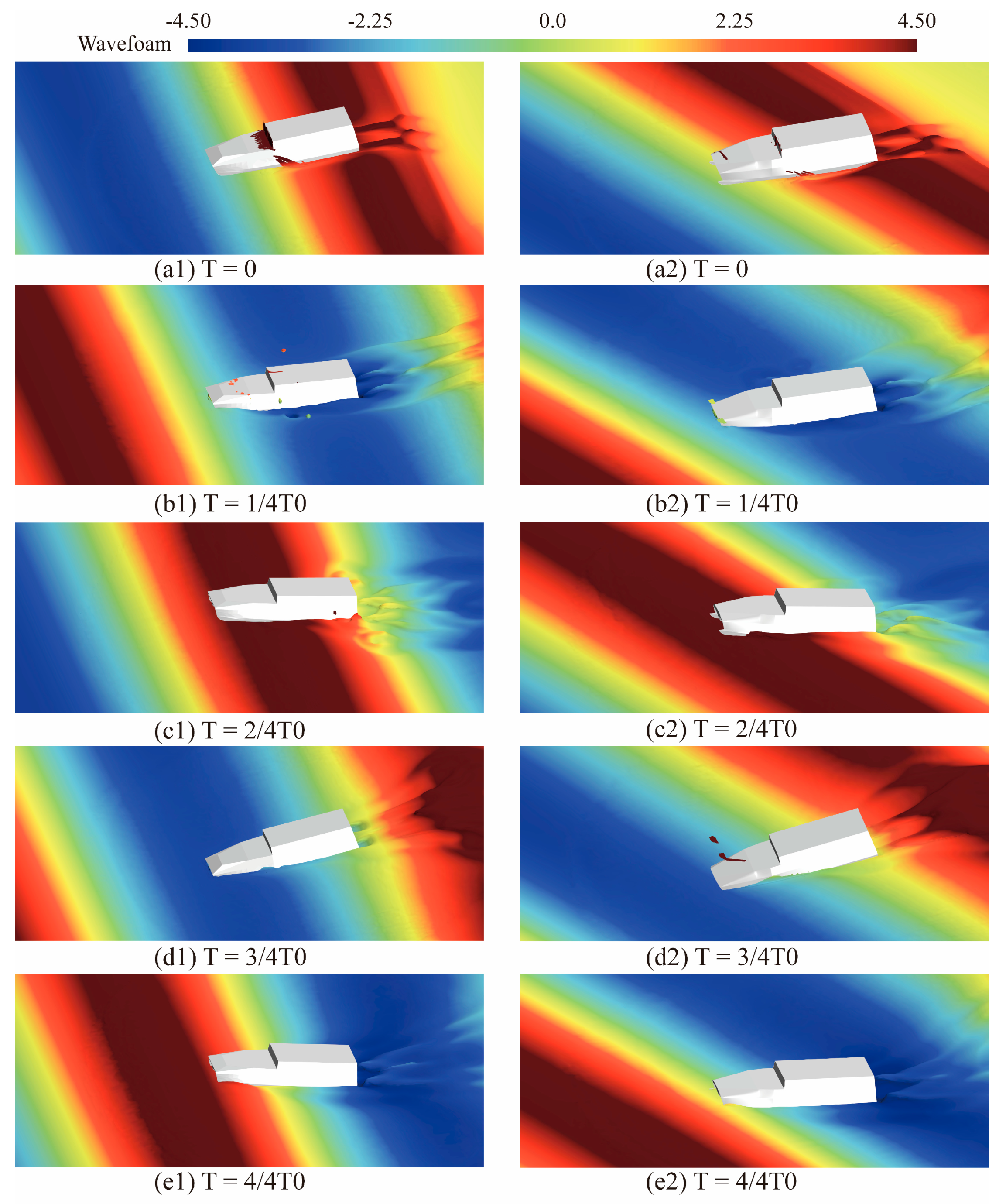
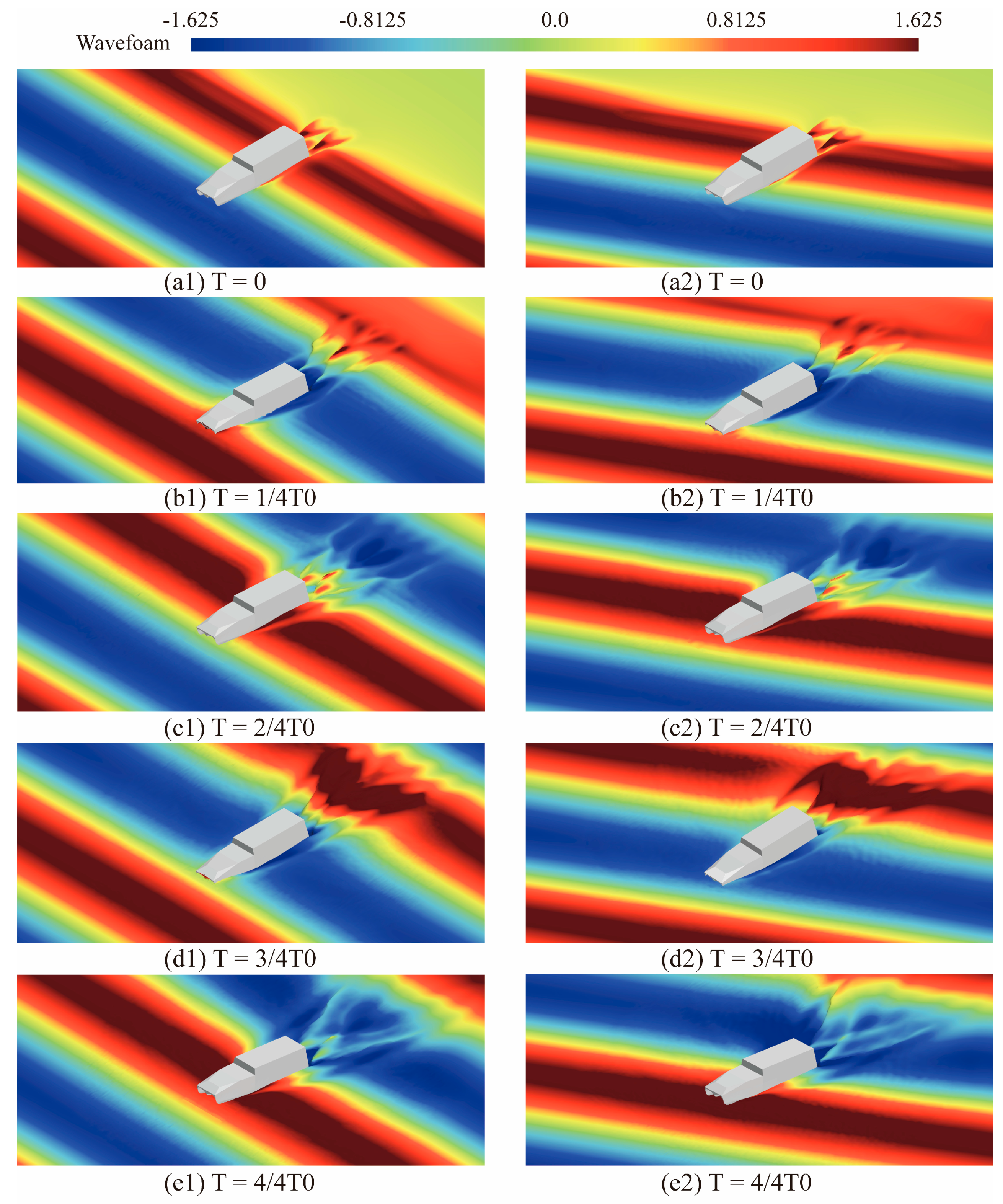
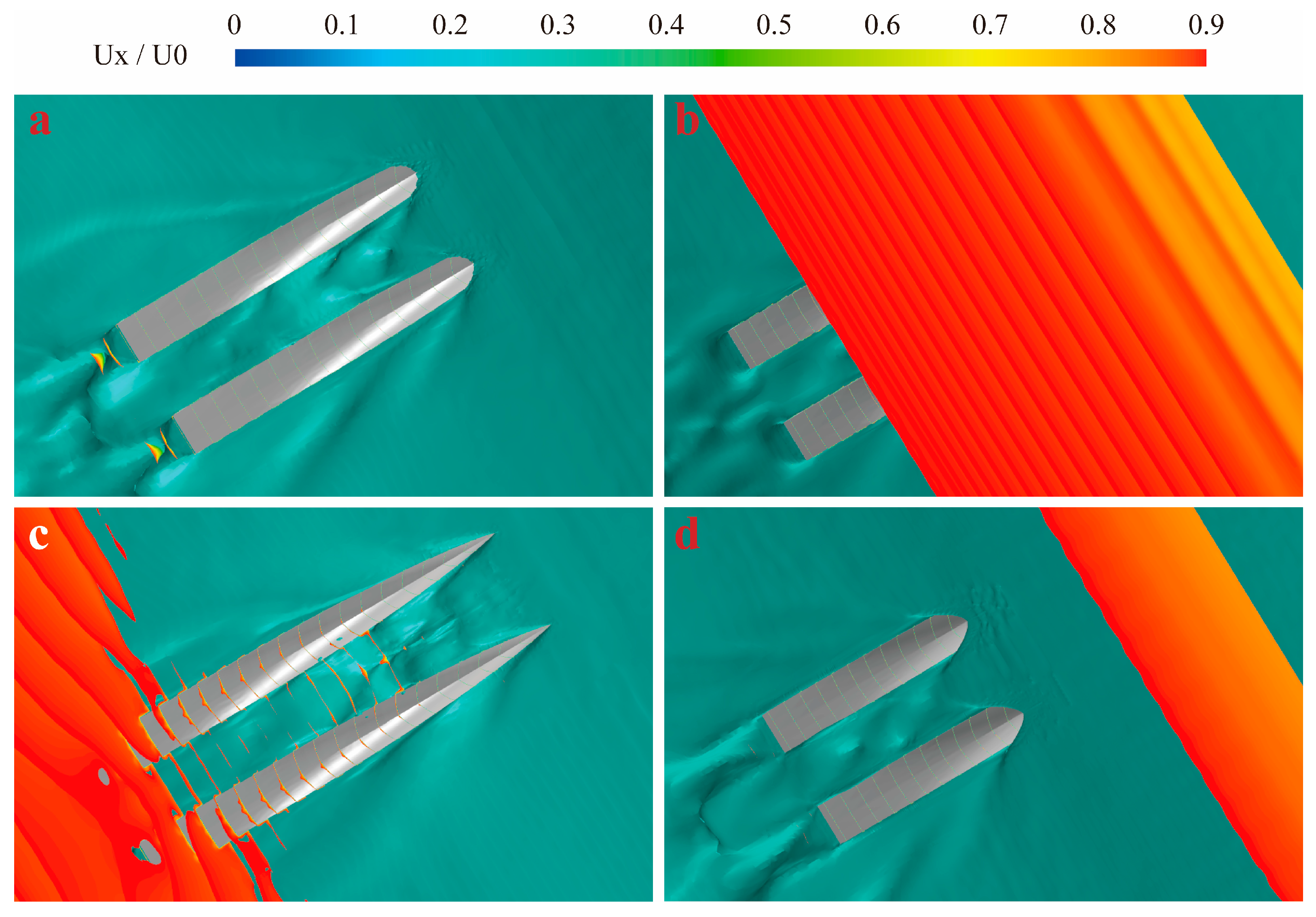
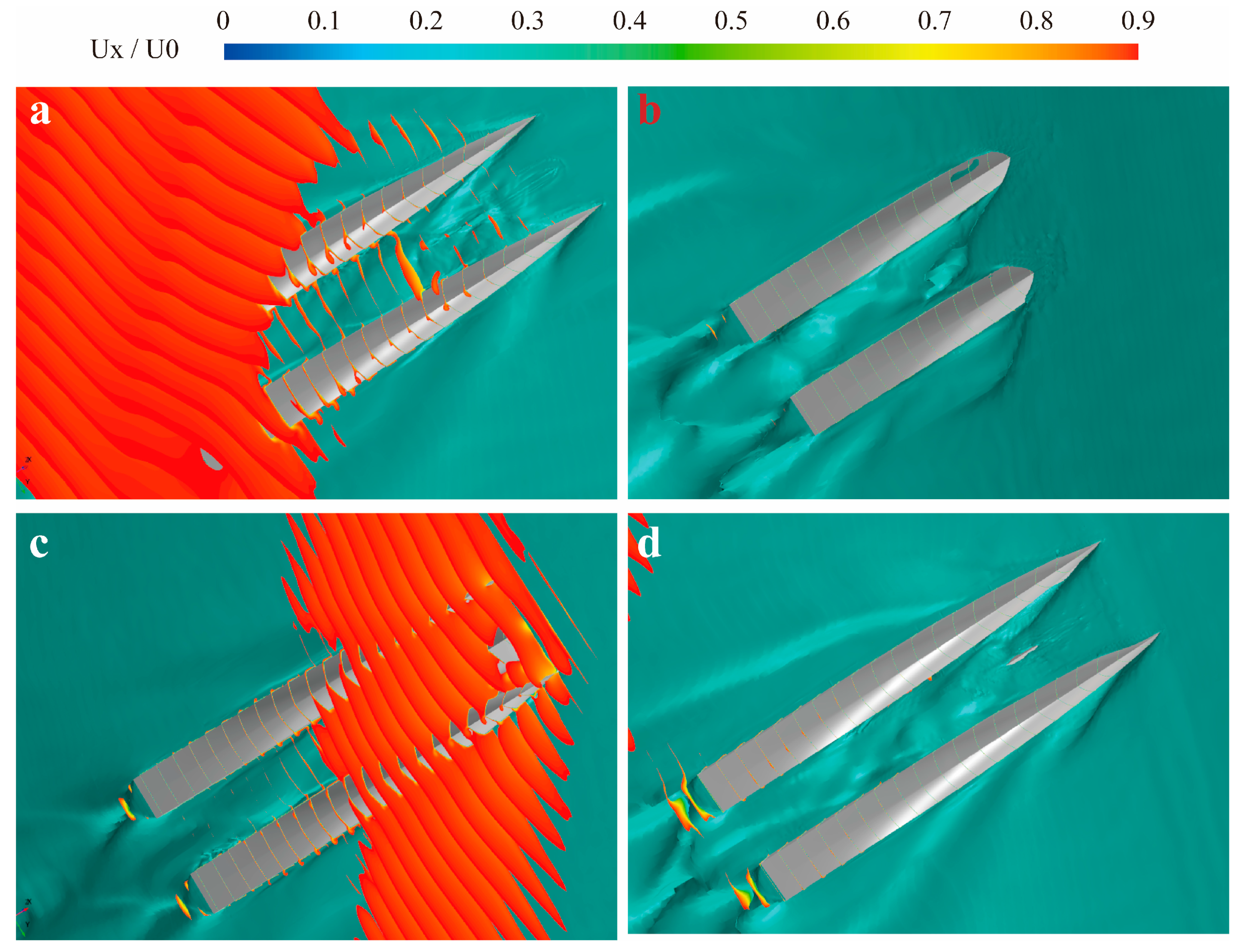
4.5. Free Surface Waveform and USV Three-Dimensional Attitude
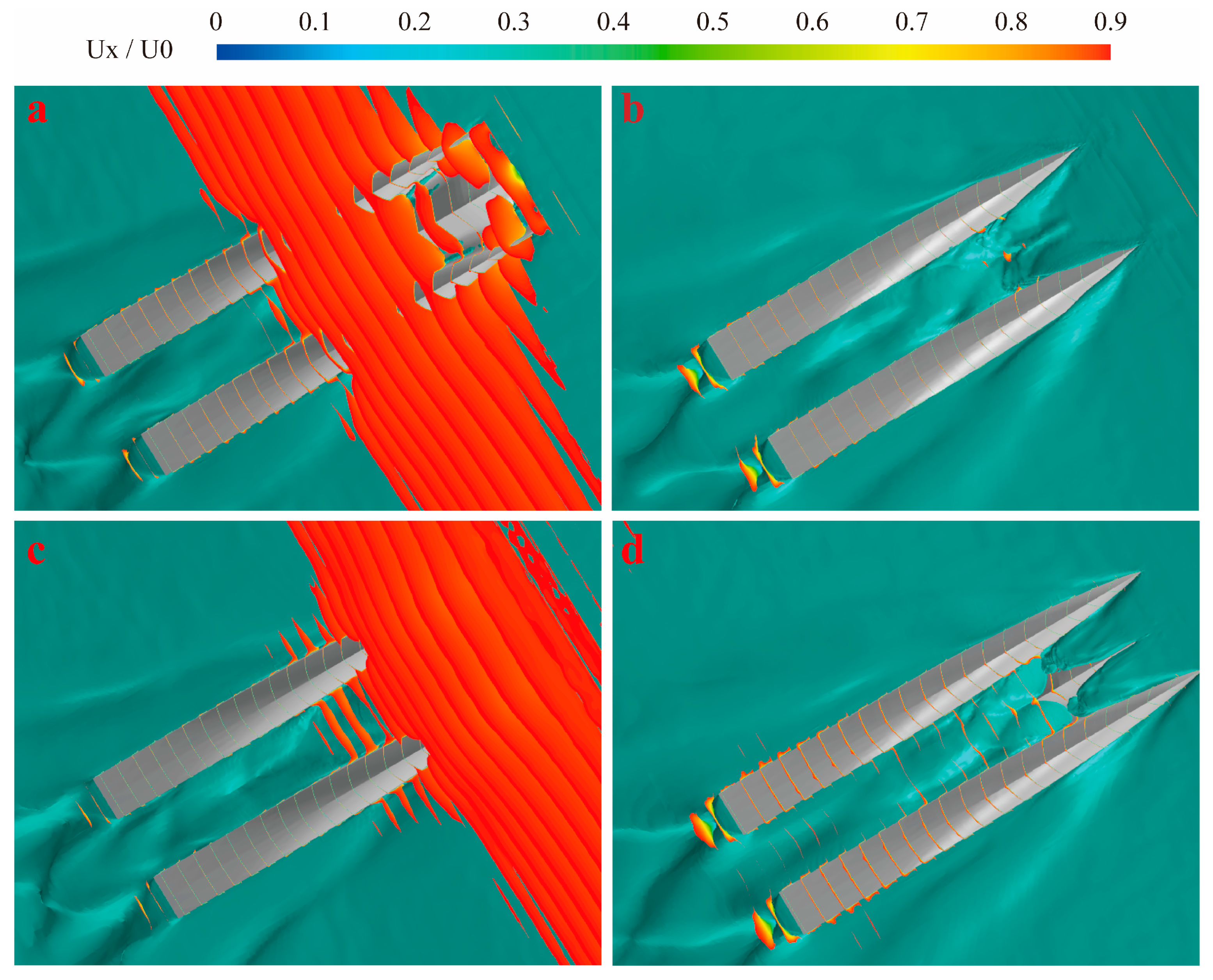
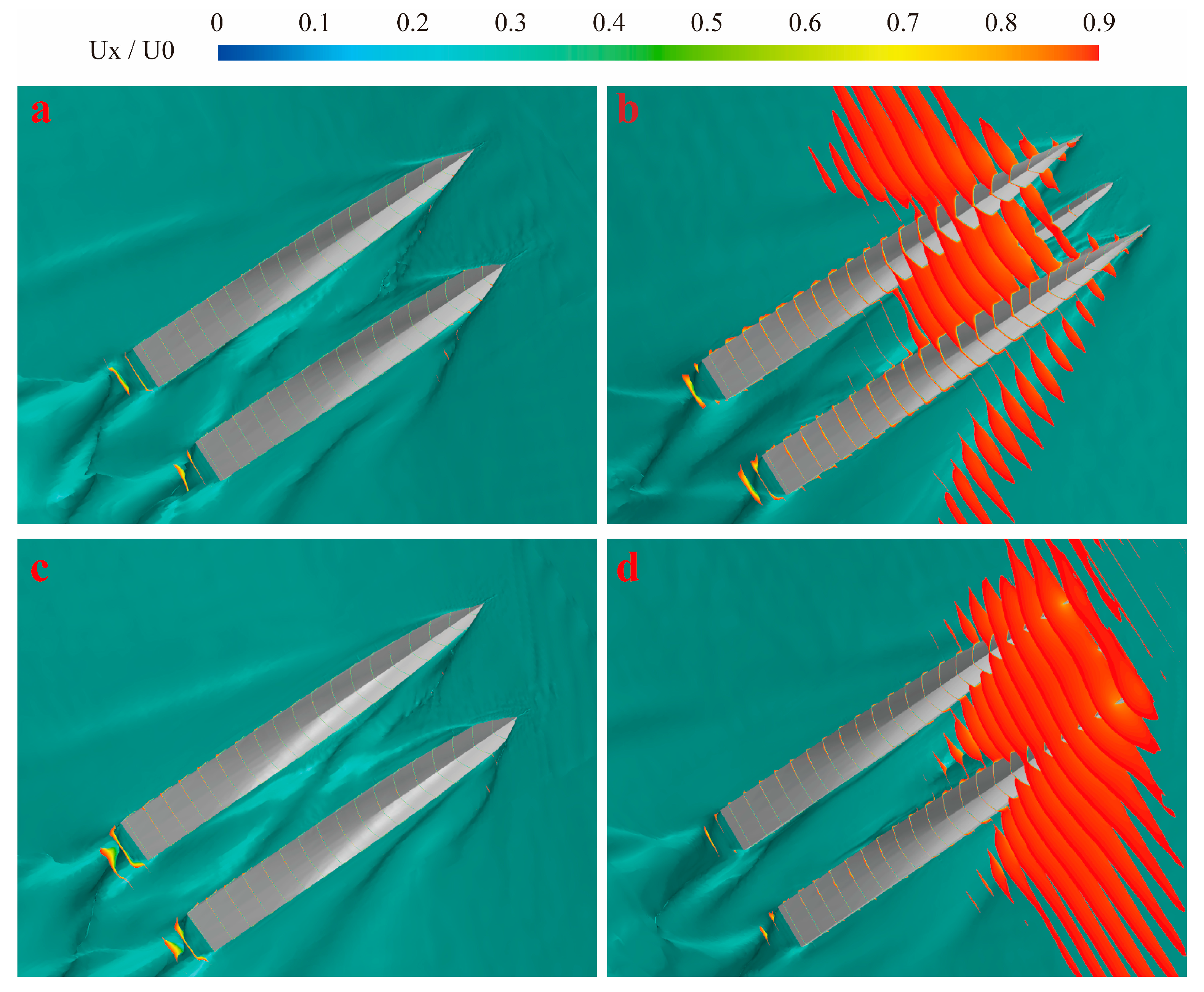
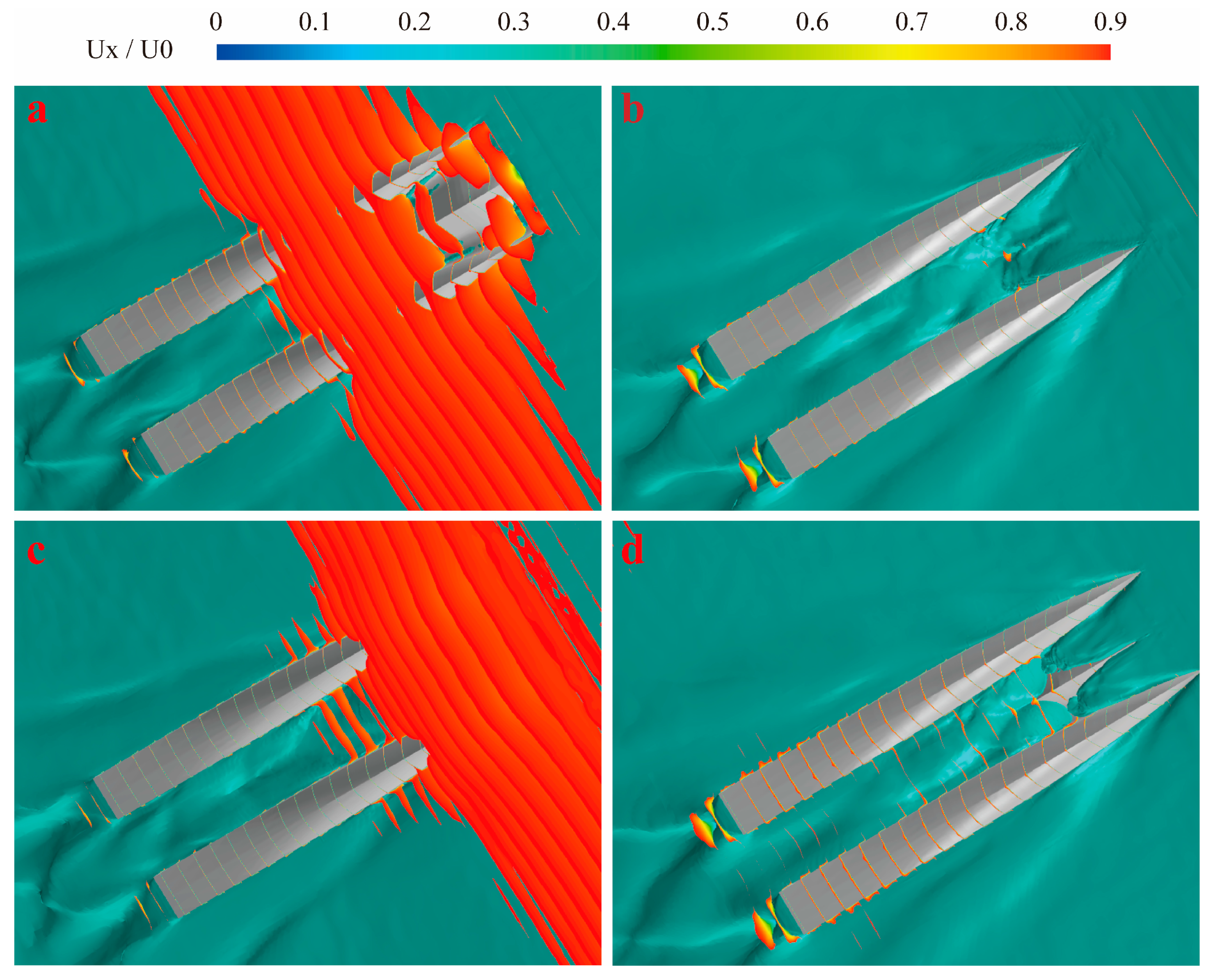
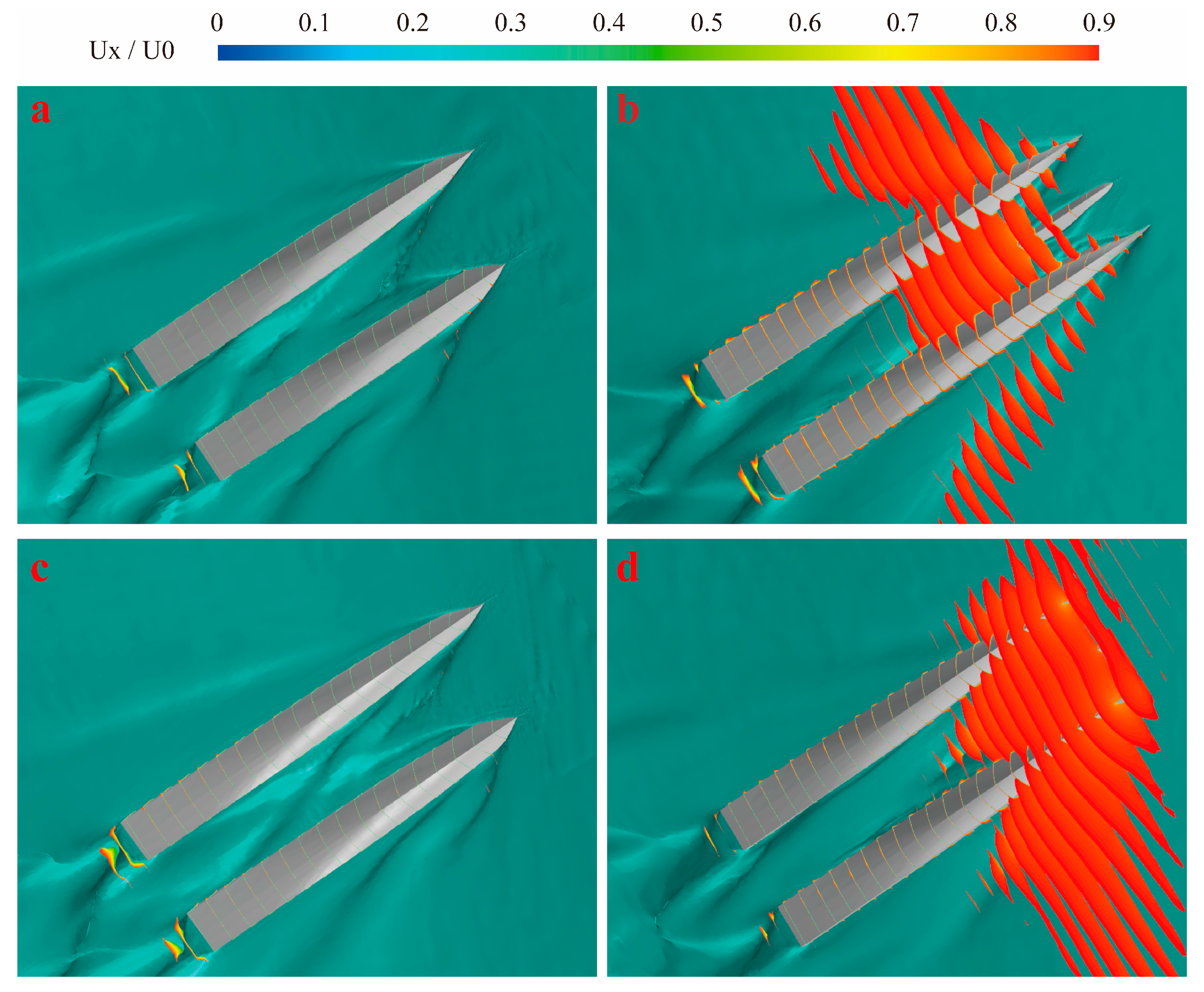
4.6. Boundary Layer
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shetty, V.K.; Sudit, M.; Nagi, R. Priority-based assignment and routing of a fleet of unmanned combat aerial vehicles. Comput. Oper. Res. 2008, 35, 1813–1828. [Google Scholar] [CrossRef]
- Arribas, F.P. Some methods to obtain the added resistance of a ship advancing in waves. Ocean Eng. 2007, 34, 946–955. [Google Scholar] [CrossRef]
- Ozdemir, Y.H.; Barlas, B. Numerical study of ship motions and added resistance in regular incident waves of KVLCC2 model. Int. J. Nav. Archit. Ocean Eng. 2017, 9, 149–159. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.; Jiao, J.; Chen, C. CFD prediction of ship seakeeping behavior in bi-directional cross wave compared with in uni-directional regular wave. Appl. Ocean Res. 2021, 107, 102426. [Google Scholar] [CrossRef]
- Kim, D.; Song, S.; Jeong, B.; Tezdogan, T. Numerical evaluation of a ship’s manoeuvrability and course keeping control under various wave conditions using CFD. Ocean Eng. 2021, 237, 109615. [Google Scholar] [CrossRef]
- Vos, J.D.; Hekkenberg, R.G.; Banda, O. The impact of autonomous ships on safety at sea—A statistical analysis. Reliab. Eng. Syst. Saf. 2021, 210, 107558. [Google Scholar] [CrossRef]
- Chen, C.; Sasa, K.; Prpić-Oršić, J.; Mizojiri, T. Statistical analysis of waves’ effects on ship navigation using high-resolution numerical wave simulation and shipboard measurements. Ocean Eng. 2021, 229, 108757. [Google Scholar] [CrossRef]
- Tarafder, M.S.; Suzuki, K. Computation of wave-making resistance of a catamaran in deep water using a potential-based panel method. Ocean Eng. 2007, 34, 1892–1900. [Google Scholar] [CrossRef]
- Fang, C.C.; Chan, H.S. Investigation of seakeeping characteristics of high-speed catamarans in waves. J. Mar. Sci. Technol. 2004, 12, 7–15. [Google Scholar] [CrossRef]
- Ma, C.; Zhu, Y.; He, J.; Zhang, C.; Wan, D.; Yang, C.; Noblesse, F. Nonlinear corrections of linear potential-flow theory of ship waves. Eur. J. Mech.-B/Fluids 2018, 67, 1–14. [Google Scholar] [CrossRef]
- Min-Guk, S.; Kyung-Kyu, Y.; Dong-Min, P.; Yonghwan, K. Numerical analysis of added resistance on ships in short waves. Ocean Eng. 2014, 87, 97–110. [Google Scholar]
- Simonsen, C.D.; Otzen, J.F.; Joncquez, S.; Stern, F. EFD and CFD for KCS heaving and pitching in regular head waves. Mar. Sci. Technol. 2013, 18, 435–459. [Google Scholar] [CrossRef]
- Tezdogan, T.; Demirel, Y.K.; Kellett, P.; Khorasanchi, M.; Incecik, A.; Turan, O. Full-scale unsteady RANS CFD simulations of ship behaviour and performance in head seas due to slow steaming. Ocean Eng. 2015, 97, 186–206. [Google Scholar] [CrossRef] [Green Version]
- Deng, R.; Luo, F.; Wu, T.; Chen, S.; Li, Y. Time-domain numerical research of the hydrodynamic characteristics of a trimaran in calm water and regular waves. Ocean Eng. 2019, 194, 106669. [Google Scholar] [CrossRef]
- Wilcox, D.C. Turbulence Modeling for CFD; DCW Industries Inc.: La Canada, CA, USA, 1994; pp. 15–19. [Google Scholar]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef] [Green Version]
- Muzaferija, S. Computation of free surface flows using interface-tracking and interface-capturing methods. In Nonlinear Water Wave Interaction; Computational Mechanics: Southampton, UK, 1998. [Google Scholar]
- STAR-CCM+ User Guide; Version 15.02; CAE Software: Melville, NY, USA, 2020.
- Roy, C.J.; Heintzelman, C.; Roberts, S.J. Estimation of Numerical Error for 3D Inviscid Flows on Cartesian Grids. In Proceedings of the 45th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 1–13 January 2007. [Google Scholar]
- Guo, C.Y.; Wu, T.C.; Zhang, Q.; Lou, W.Z. Numerical simulation and experimental studies on aft hull local parameterized non-geosim deformation for correcting scale effects of nominal wake field. Brodogradnja 2017, 68, 77–96. [Google Scholar] [CrossRef] [Green Version]
- Fenton, J.D. A Fifth-Order Stokes Theory for Steady Waves. J. Waterw. Port Coast. Ocean Eng. 1985, 111, 216–234. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.W.; Jang, H.; Baquet, A.; O’Sullivan, J.; Lee, S.; Kim, B.; Read, A.; Jasak, H. Technical and Economic Readiness Review of CFD-Based Numerical Wave Basin for Offshore Floater Design. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 2–5 May 2016. [Google Scholar]
- Wu, T.C.; Luo, W.Z.; Jiang, D.P.; Deng, R.; Huang, S. Numerical Study on Wave-Ice Interaction in the Marginal Ice Zone. J. Mar. Sci. Eng. 2020, 9, 4. [Google Scholar] [CrossRef]
- Jiao, J.L.; Huang, S.X.; Soares, C.G. Numerical investigation of ship motions in cross waves using CFD. Ocean Eng. 2021, 223, 108711. [Google Scholar] [CrossRef]
- Kim, D.; Song, S.; Tezdogan, T. Free running CFD simulations to investigate ship manoeuvrability in waves. Ocean Eng. 2021, 236, 109567. [Google Scholar] [CrossRef]
- Perić, R.; Abdel-Maksoud, M. Analytical prediction of reflection coefficients for wave absorbing layers in flow simulations of regular free-surface waves. Ocean Eng. 2018, 147, 132–147. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value |
|---|---|---|
| Length of overall (m) | LOA | 42.00 |
| Length between perpendiculars (m) | Lpp | 41.05 |
| Breadth (m) | B | 12.00 |
| Design draft (m) | T | 1.45 |
| Depth (m) | D | 4.50 |
| Boundary Name | Boundary Conditions |
|---|---|
| Inlet | 1. Velocity inlet; 2. Fifth order Stokes waves based on VOF components of water vapor; 3. The relative velocity of the USV is 18 kn; 4. The turbulence intensity is 0.01. |
| Outlet | 1. Pressure outlet; 2. Fifth order Stokes waves based on VOF components of water vapor; 3. Fifth order Stokes wave hydrodynamic pressure. |
| Bottom | Same as the inlet boundary condition |
| USV hull | No-slip wall |
| Boundary of Overset region | Overset mesh interface |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, S.; Liu, W.; Luo, W.; Wang, K. Numerical Simulation of the Motion of a Large Scale Unmanned Surface Vessel in High Sea State Waves. J. Mar. Sci. Eng. 2021, 9, 982. https://doi.org/10.3390/jmse9090982
Huang S, Liu W, Luo W, Wang K. Numerical Simulation of the Motion of a Large Scale Unmanned Surface Vessel in High Sea State Waves. Journal of Marine Science and Engineering. 2021; 9(9):982. https://doi.org/10.3390/jmse9090982
Chicago/Turabian StyleHuang, Shuo, Weiqi Liu, Wanzhen Luo, and Kai Wang. 2021. "Numerical Simulation of the Motion of a Large Scale Unmanned Surface Vessel in High Sea State Waves" Journal of Marine Science and Engineering 9, no. 9: 982. https://doi.org/10.3390/jmse9090982
APA StyleHuang, S., Liu, W., Luo, W., & Wang, K. (2021). Numerical Simulation of the Motion of a Large Scale Unmanned Surface Vessel in High Sea State Waves. Journal of Marine Science and Engineering, 9(9), 982. https://doi.org/10.3390/jmse9090982