1. Introduction
Assault amphibious vehicles (AAVs) are categorized as a weapon system used for landing operations and landing amphibious forces from the sea. For landing operation, fast arrival at the shore from ships is a critical issue; thus, reliable and robust hydrodynamic performance of AAVs at high speed is essential. AAVs usually have a box-shaped chassis, but some appendages are installed to reduce resistance. The design of AAVs with appendages for operation at the sea considers trim-control devices such as hydrofoil to achieve high speed by decreasing the wetted surface area at high speed. In addition, AAVs are equipped with waterjets for propulsion, which are common in high-speed vessels. Therefore, the running attitude of AAVs changes dynamically in the sea.
The resistance performance of an AAV is strongly related to the attitude of the vehicle body, so it is necessary to install an appendage to maintain stability during operation and to improve resistance performance. However, it causes negative impacts on dynamic instability during high-speed maneuvering on the surface. Therefore, it should be designed to control the running attitude by installing appendages such as a bow plate and hydrofoil on the front and rear of the vehicle body.
Helvacioglu et al. [
1] conducted experiments and analyzed data focusing on the river crossing capability of a scale model of an amphibious armored personnel carrier (AAPC). Because an AAPC has a low freeboard, the longitudinal and lateral stability of the vehicle were tested for resistance within 10 km/h of the actual vehicle speed, and the effect of reducing resistance was confirmed by installing an appropriate bow plate on the front of the armored vehicle. In addition, the resistance performance according to the direction of the tide was confirmed among floating ships. Lee et al. [
2] conducted model tests to investigate running attitude and powering performance. The test model was a box-shaped AAV and a hydrofoil was applied as a trim-control device. They found that the interaction between the waterjets and hydrofoil can enhance the dynamic lift of the hydrofoil. Previous studies on box-shaped vehicles focused on design for resistance reduction and hydrodynamic characteristics such as vehicle running attitude and powering performance.
Box-shaped vehicles should overcome instability while maneuvering at the sea because the pressure between the bow and stern is larger than that of a general displacement type vessel. Therefore, motion control using an appendage such as a hydrofoil is required. In general, however, amphibious vehicles are operated by using a waterjet propulsion system. The waterjet propulsion system obtains thrust by using the change in momentum generated by supplying the momentum to water by rotating the impeller at high speeds. [
3] Due to the rapid change in the flow on the vehicle’s bottom as a result of the rotation of the impeller, it is expected that a large change in the attitude of the vehicle body will occur. In addition, due to the lift generated on the bow plate and hydrofoil, vertical motions such as heaving and pitching are large in most cases. The pitch motion eventually affects the operator’s forward vision adversely and acts as a factor that hinders seakeeping performance. Therefore, it is necessary to analyze the hydrodynamic characteristics of such a box-shaped vehicle and to improve the running attitude to secure stability in waves.
Katayama et al. [
4] investigated a control system using trim tabs and interceptors on a high-speed passenger ship. The characteristics of hydrodynamic forces created by trim tabs and interceptors in a steady running condition were investigated through model tests. Then, two controllers were applied to perform motion response tests in regular waves and compare to each other, then the effectiveness in terms of the reduction of pitch motion was confirmed. However, the efficiency of the control systems decreased in long wavelength conditions. Santos et al. [
5] designed a fuzzy control system to reduce the vertical motions of a fast ferry. It aims to reduce pitch acceleration by controlling flaps installed on the stern and a T-foil installed on the bow of the fast ferry. They applied a fuzzy proportional-integral-derivative (PID) controller and the performance of the controller was simulation-tested in regular and irregular waves. The results were highly satisfactory, with a considerable reduction of vertical acceleration. Karimi et al. [
6] investigated the impact of controlled interceptors on a planing craft’s seakeeping quality with the application of experimental and theoretical methods. They designed control systems based on a linear quadratic regulator (LQR) controller and showed the application of a controlled stern interceptor reduced pitch and heave to have reductions of up to 25% and 20%, respectively. Choi et al. [
7] identified the pitch dynamics model of a planing hull that includes a stern interceptor capable of active control by performing model tests in regular waves. They designed a controller that controls the attitude of the ship and verified the effectiveness of active control through towing tank experiments. Park et al. [
8] studied an active control system using an interceptor. The subject vessel was a high-speed planing vessel. It was applied to verify the performance of the controllable interceptor system. Trim and rise decreased as interceptor depth increased. The effects of pitch motion reduction by about 41.3% in the regular wave condition and 32.4% in the irregular wave condition was experimentally confirmed. Liu et al. [
9] experimentally studied a control method for the vertical stabilization of a trimaran. They investigated a trimaran’s pitch motion in irregular waves. A T-foil and a flap were applied as appendages for motion control. The resultant force and moment distribution with Kalman filter (RFMD-K) was applied as a control strategy, and the reduction rates of heave and pitch were 31.31% and 58.79%, respectively.
In summarizing the previous research results, in terms of motion control, pitch motion was controlled by the flow change around the hull using appendages such as interceptors and trim tabs. Changes in the flow around the hull through appendage control are disadvantageous in terms of powering performance because it eventually changes the hull resistance. In addition, the controller based on changing the flow is limited in obtaining sufficient control force for motion that requires a fast response.
In the case of a general waterjet system, a mechanical power device such as a diesel engine is installed to rotate the impeller. In the case of the engine, it is possible to control the revolution rate, but it is hard to achieve precise dynamic performance for ship control because it is usually connected to the propulsion shaft through a reduction gear. However, if the impeller is driven by an electric motor, it is possible to control the revolution rate of the motor dynamically. Since the dynamic performance of an electric propulsion system is more precise than that of a mechanical propulsion system, it can be more effectively used for pitch motion control.
In this study, pitch motion is controlled using impeller revolution rate control for an amphibious vehicle equipped with a motor-driven waterjet system. The revolution rate of the impeller at the self-propelled point was obtained through a self-propulsion test. The effectiveness of pitch motion control through impeller revolution rate control in regular and irregular wave conditions was verified. As a result of the experiment, it could be confirmed that the reduction in pitch motion was greater than the methods proposed in the previous papers.
5. Conclusions
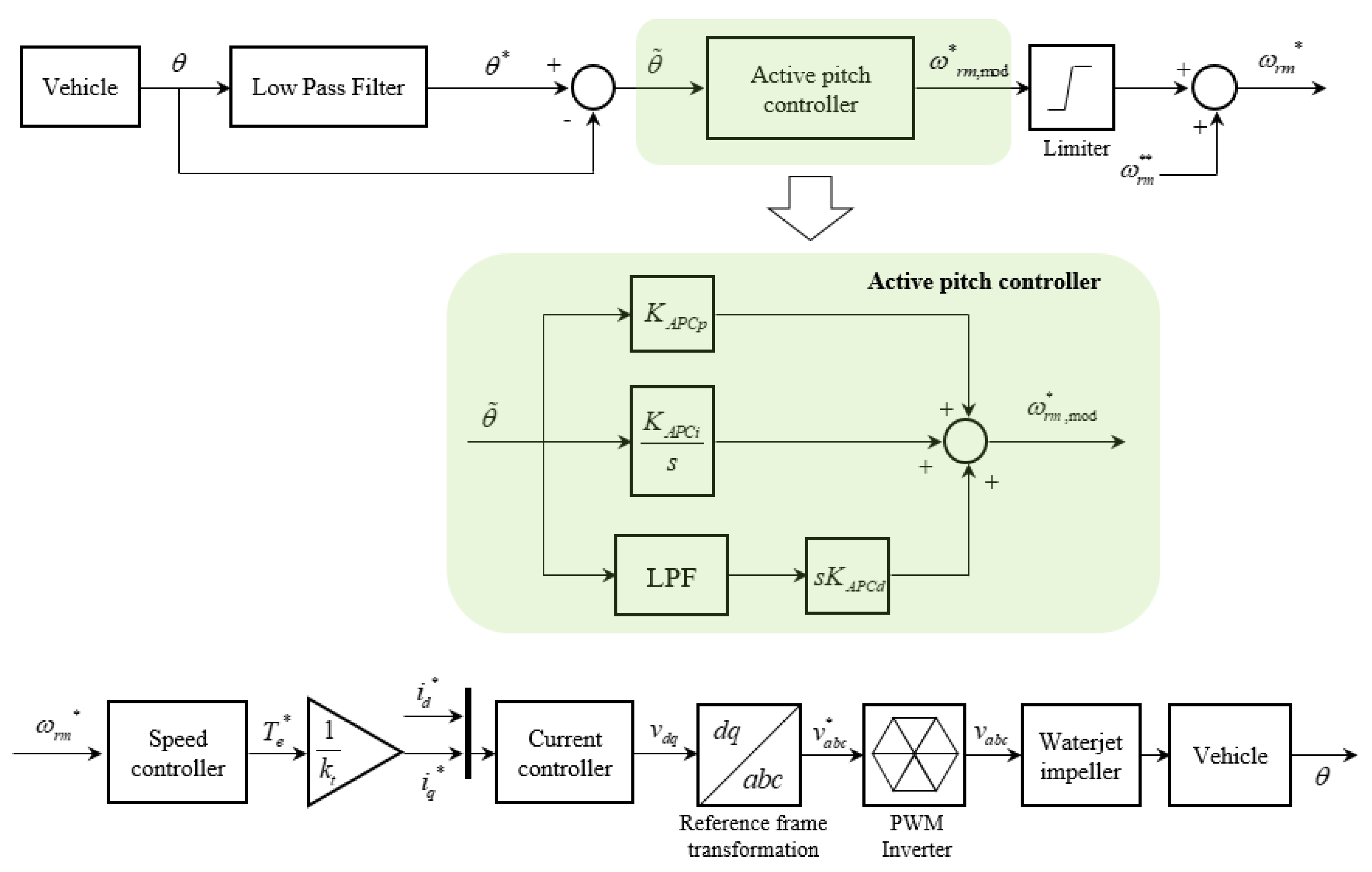
In this study, the effectiveness of the pitch motion control of an AAV was experimentally verified through the impeller revolution rate control of a motor-driven waterjet propulsion system. The real-time pitch angle was passed through an LPF to generate motion commands. The controller was configured to follow the command value by passing the difference between the generated command and the current pitch angle to the input of the controller. In order to minimize the change in design speed, the final speed command was generated by limiting the PID controller output to a certain range.
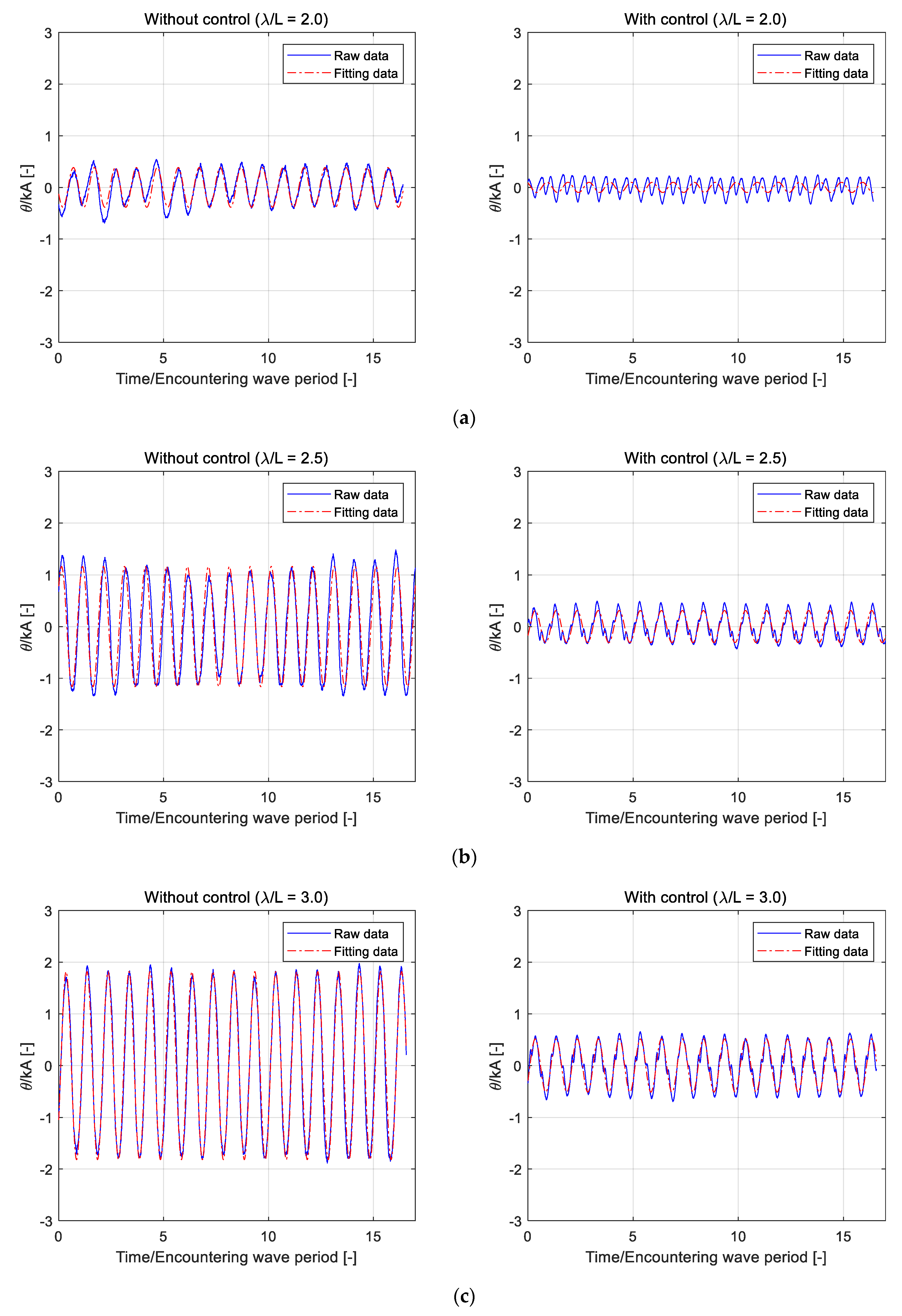
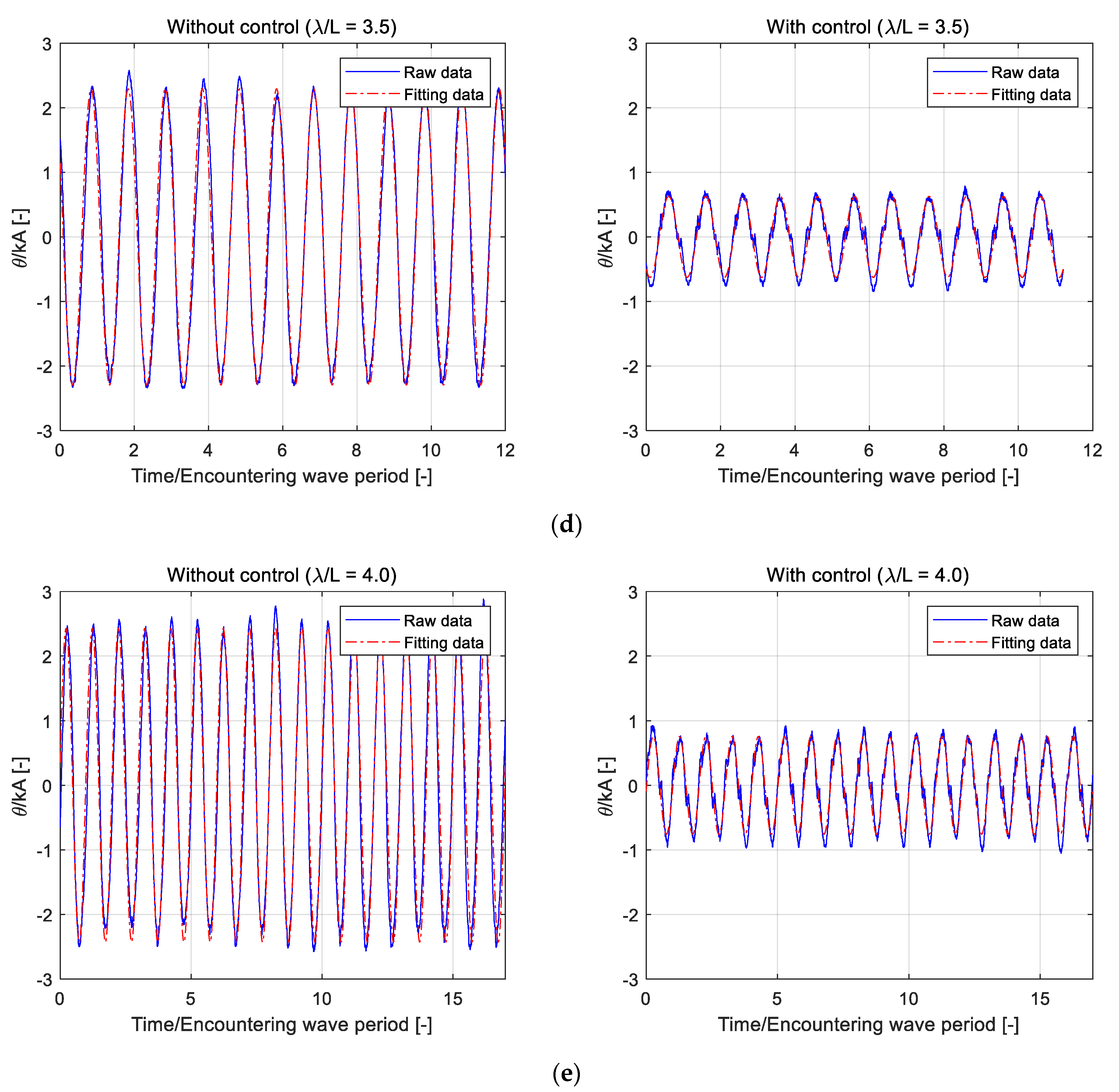
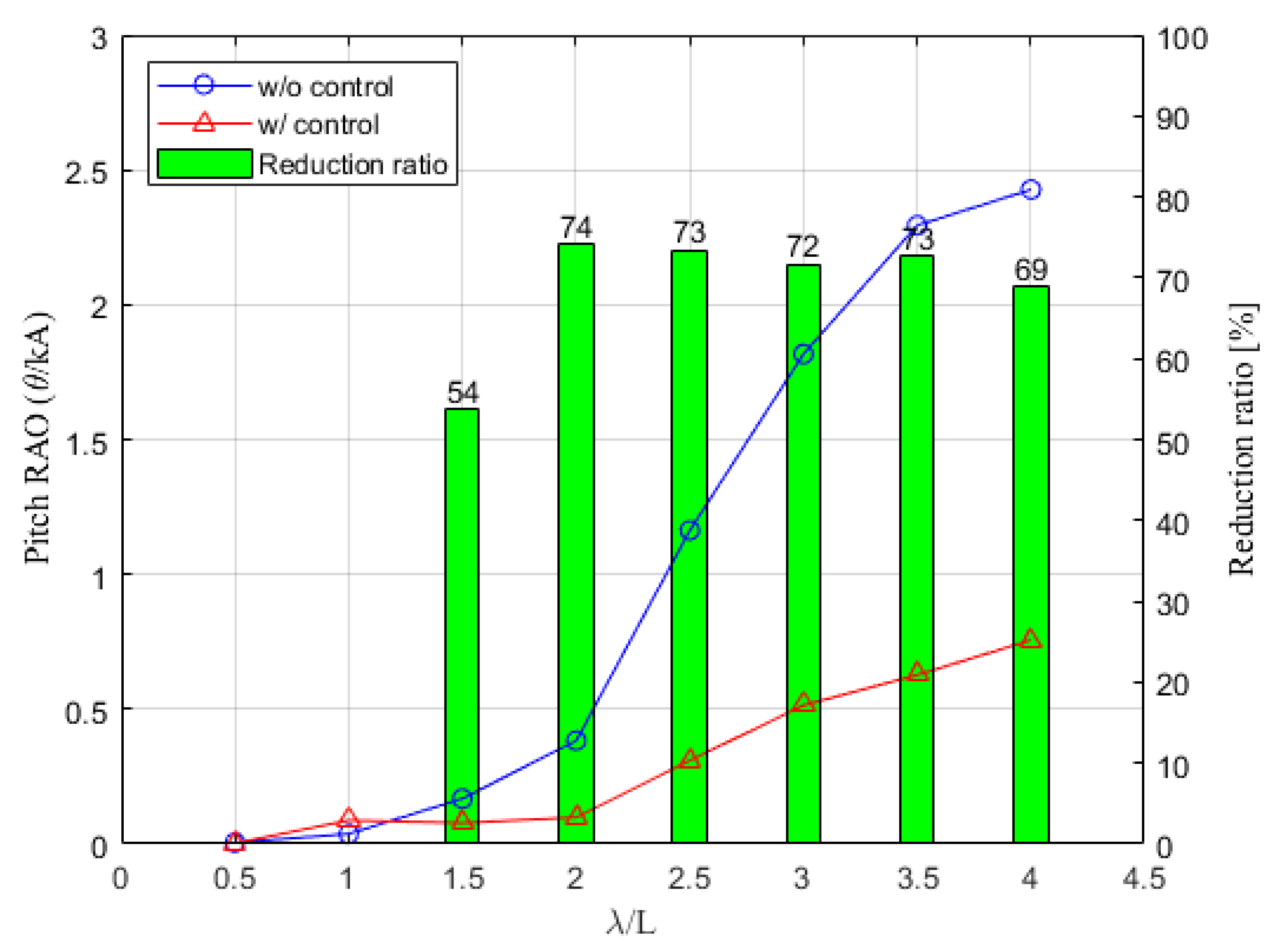
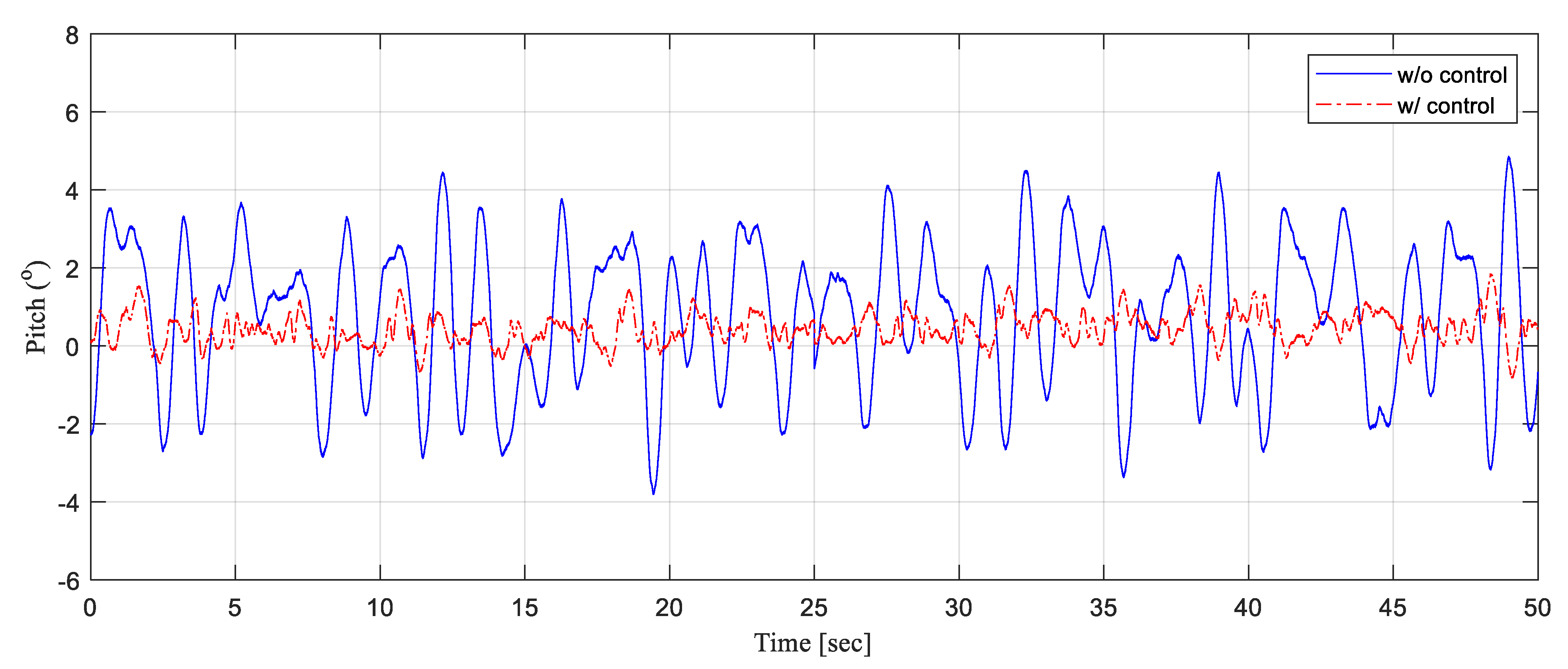
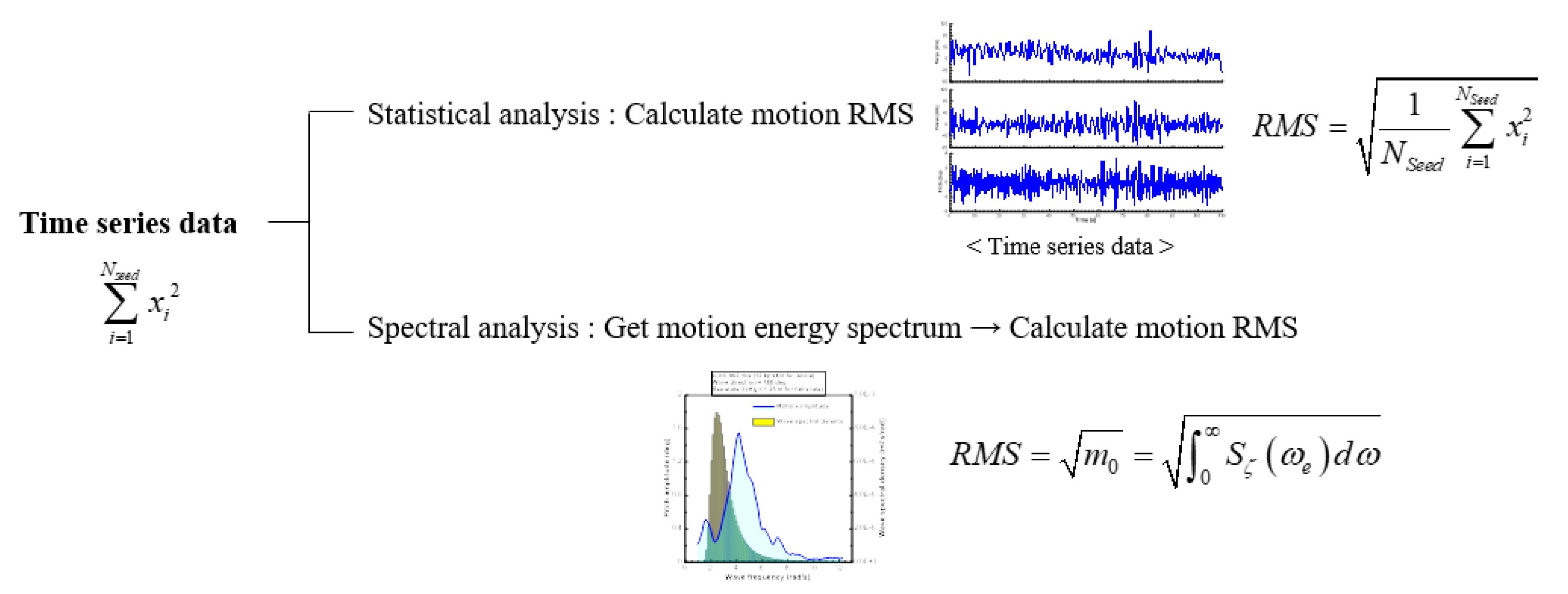
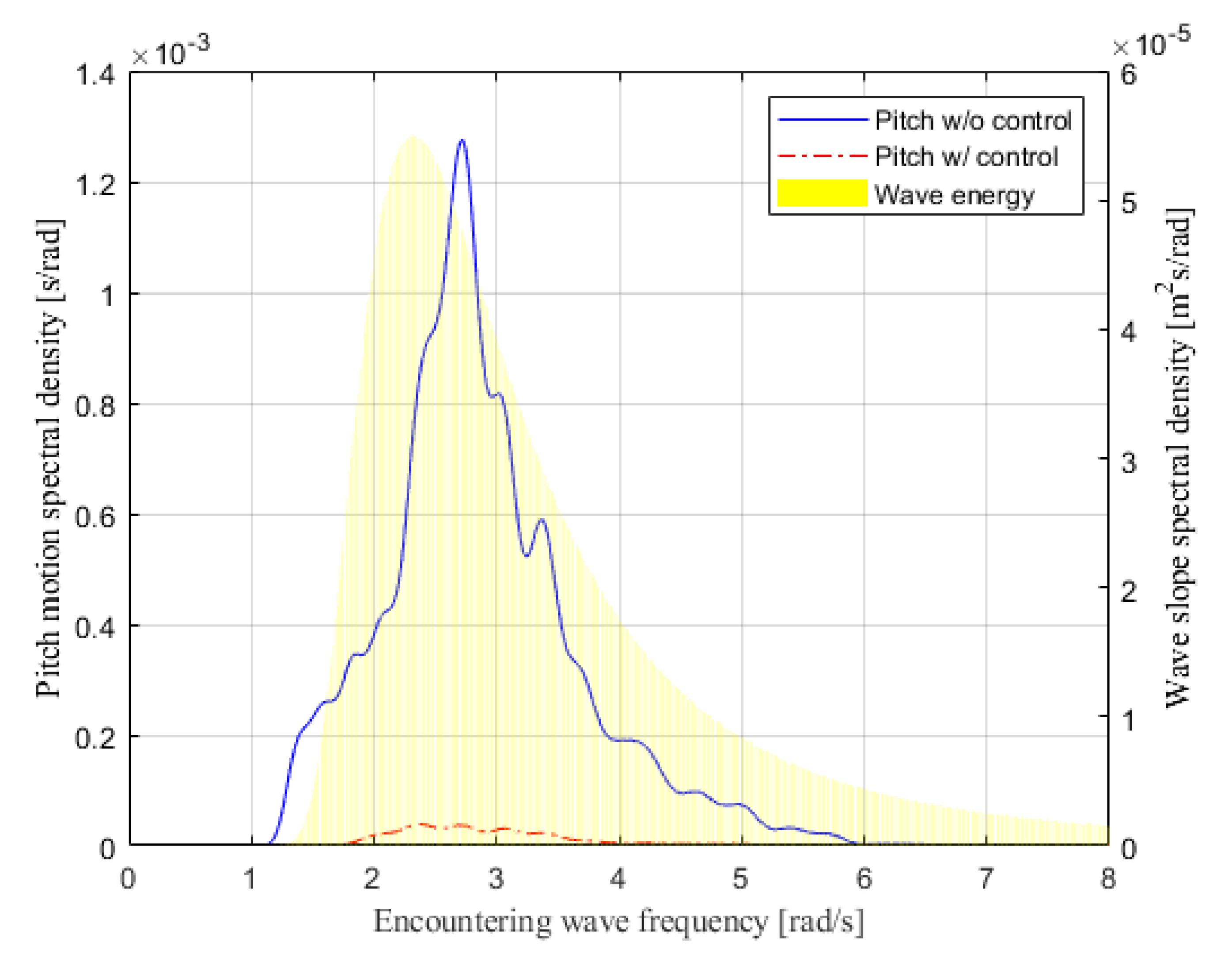
The seakeeping tests in regular waves were performed with and without control at eight regular wave frequencies. As the wavelength increases, the response of the pitch increases, showing a tendency of typical motion characteristics. When control is applied, the tendency of the pitch response shows a similar result to that of the case where the controller is not activated, and most of the motion responses are reduced by about 70% in the frequency region where the pitch motion largely occurs. Since a noticeable decrease in motion is seen in most of the wave frequency ranges, this result is considered to be a remarkable achievement when compared with previous studies. After first checking the performance of the controller in regular wave conditions, the performance of the controller was checked again in the long-crested irregular wave corresponding to sea state 2. Two methods were applied to analyze motion data according to whether or not a controller is applied in an irregular wave environment. The first one is a statistical analysis that directly estimates RMS from time-series data, and the second one is a spectral analysis that estimates RMS by transforming the data in the time domain to the frequency domain. It was confirmed that both methods showed similar results. When the controller was applied, the result was that the pitch RMS decreased by more than 60%. In general, the pitch motion is the largest in the head wave, so even if it results from performing the model tests only in the head wave, it is considered a control performance that can be practically applied.
Since pitch motion is prominent in the head sea condition, the worst case of the head sea condition in terms of seakeeping ability was mainly analyzed. However, in other wave direction conditions such as bow sea and beam sea, it may be necessary to change the gain of the controller designed in the head sea condition. The results of this study show the results of the towing tank experiment, that is, basic research, to test the performance of reducing pitch motion by applying a controller. Although the performance was sufficiently verified by model tests, a more reliable performance verification is required by free-running model tests for the designed controller. In addition, we plan to perform system identification to estimate parameters including added mass and damping coefficients of heave-pitch coupled equations of motion by using the data measured through the free-running model tests. It is believed that more effective controller tuning can be performed by using the equations of motion identified through the system identification. Moreover, this experiment re-emphasizes that the focus is applied only to the pitching motion control in the head sea condition, and the change of waterjet rpm to control the pitch can affect other motions such as roll and heave. From this study, it is considered as a matter to be continued in the future.


 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}