Long-Endurance Dynamic Path Planning Method of NSV Considering Wind Energy Capture


Abstract
:1. Introduction
1.1. Related Work
1.2. Problem Definition and Paper Structure
- The input to a wind energy capture system is wind energy and the output is electrical energy, so the mapping of wind speed magnitude to electrical power magnitude needs to be established;
- Theoretically, sailing in high wind speed areas can increase the wind energy captured by the NSV, but the effect of high wind areas on the hull drag of the NSV must also be considered. Therefore, an NSV energy input/output model is needed to measure the net capture of the NSV system;
- The environment from the start point to the target point is dynamic so that the temporal and spatial variability of the offshore wind field needs to be taken into account when path planning.
2. Offshore Wind Field Modeling and Wind Energy Capture Experiment
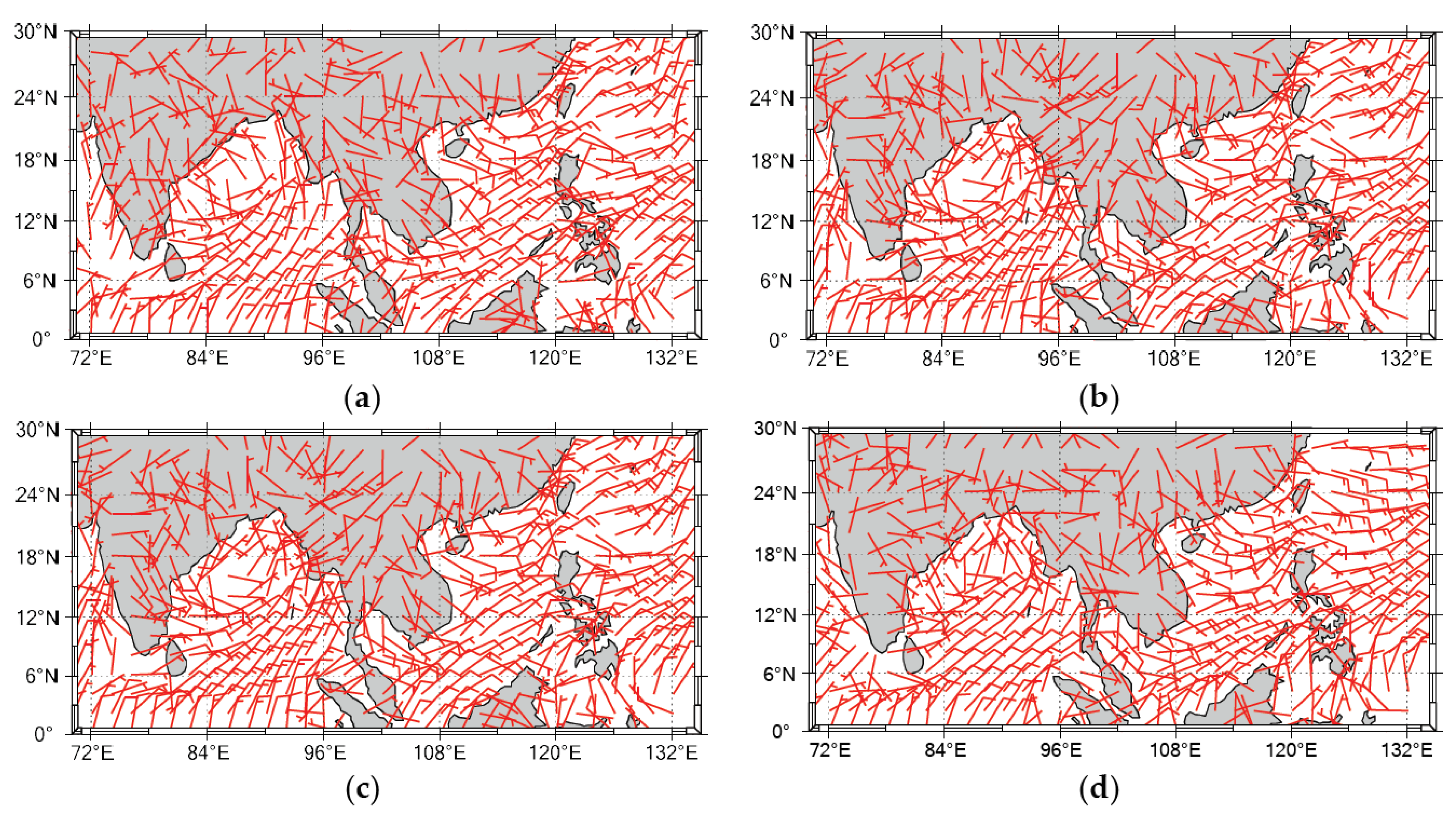
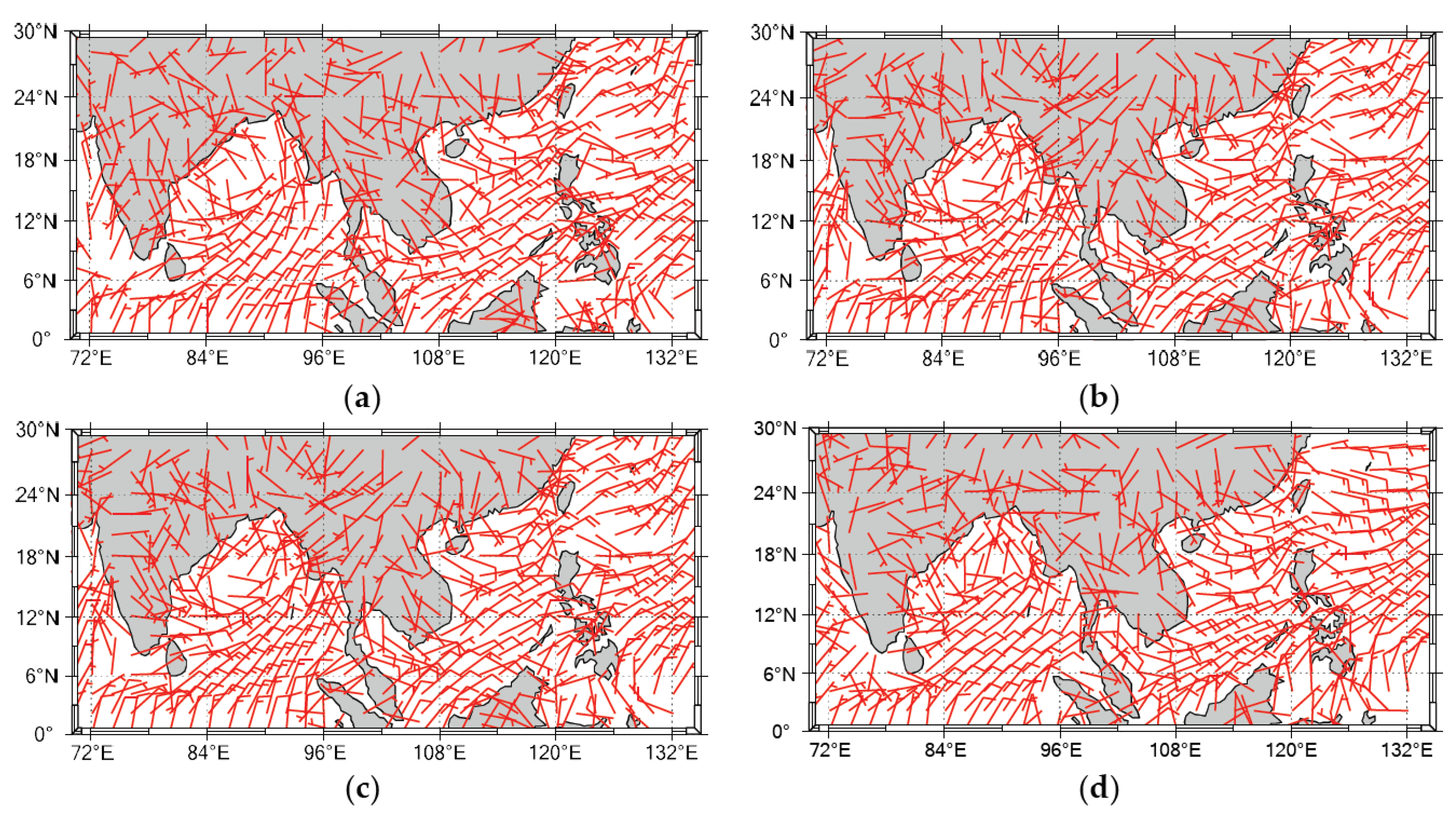
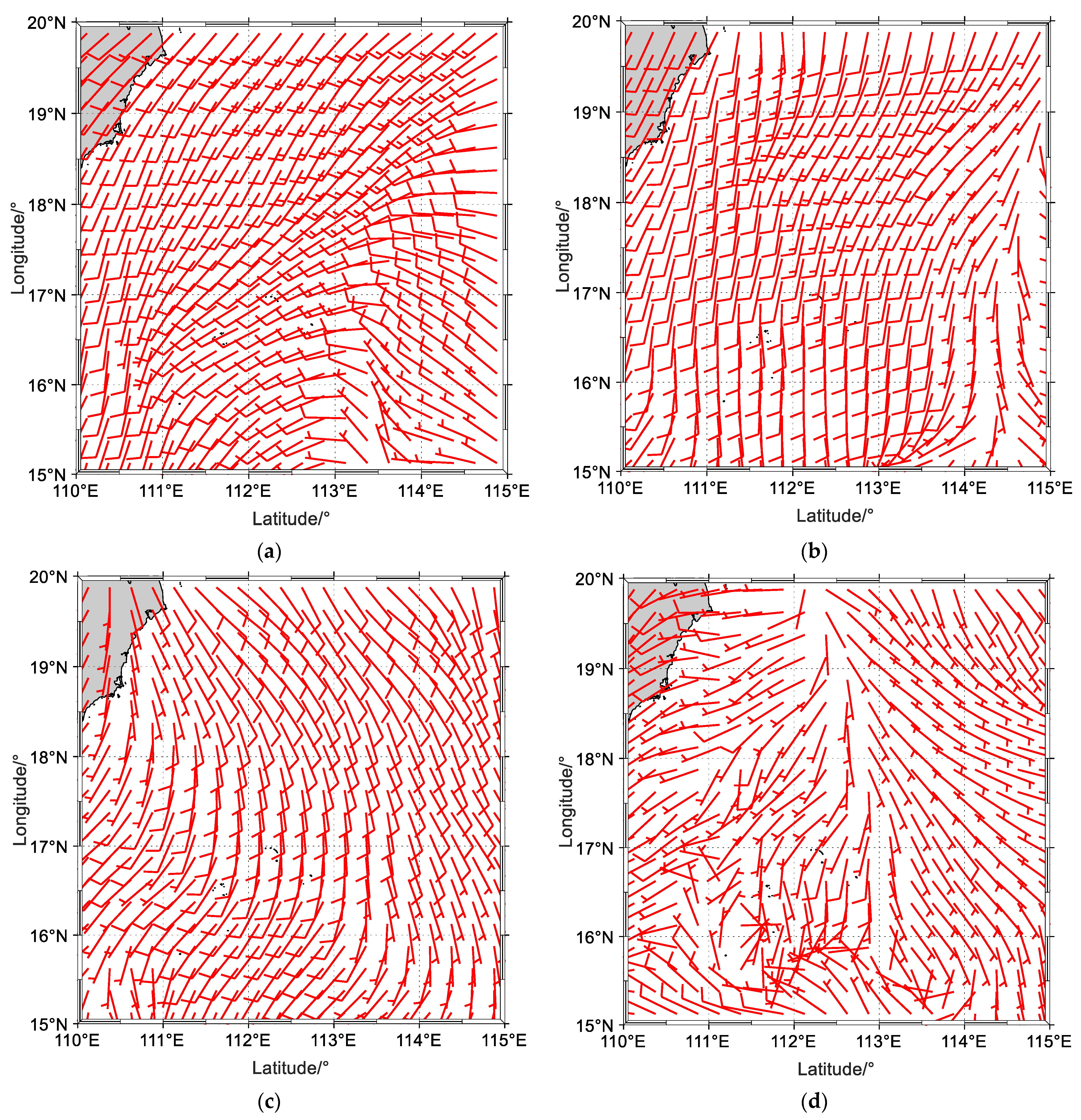
2.1. Time-Varying Ocean Wind Field Visualization Modeling
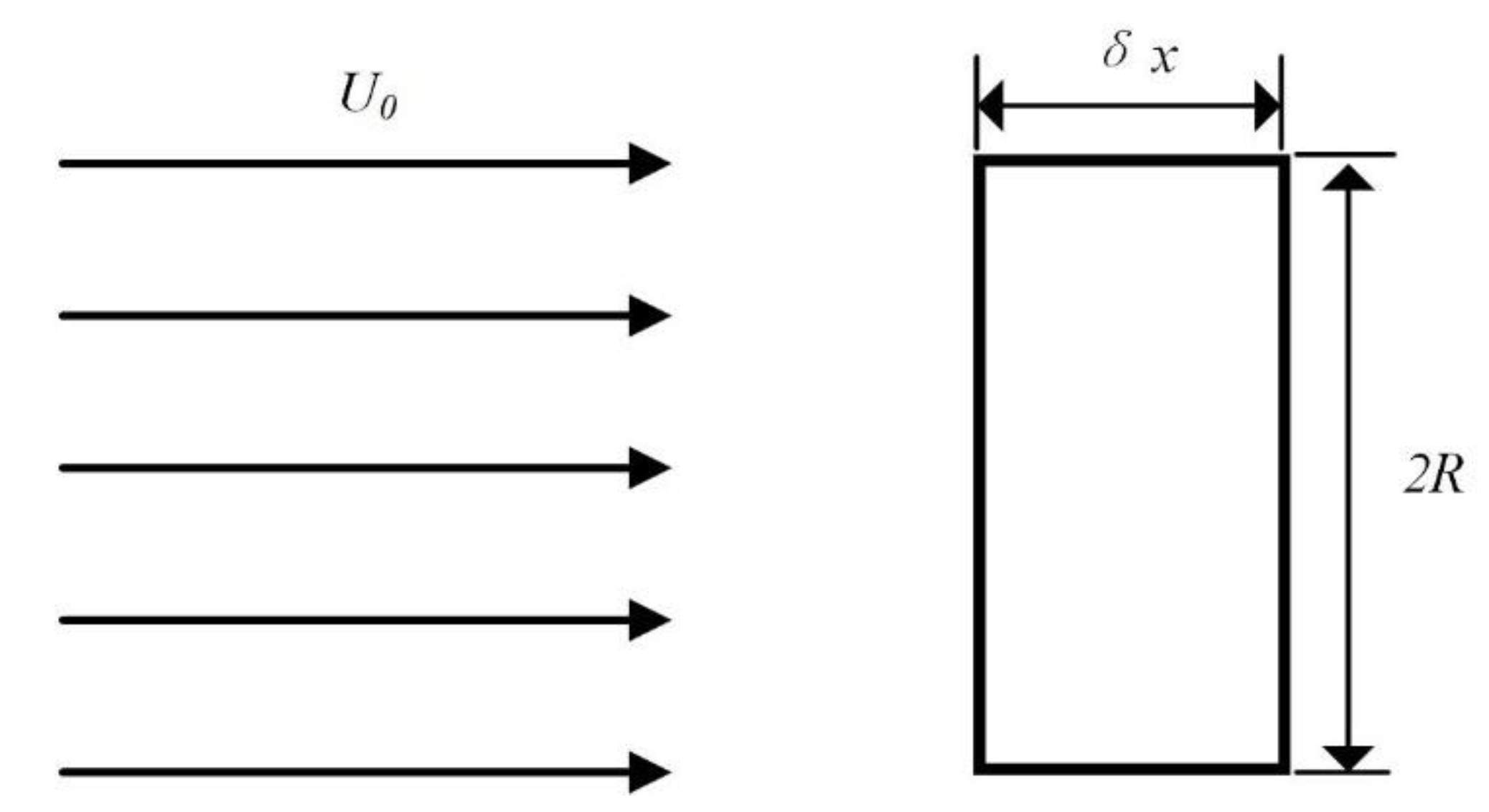
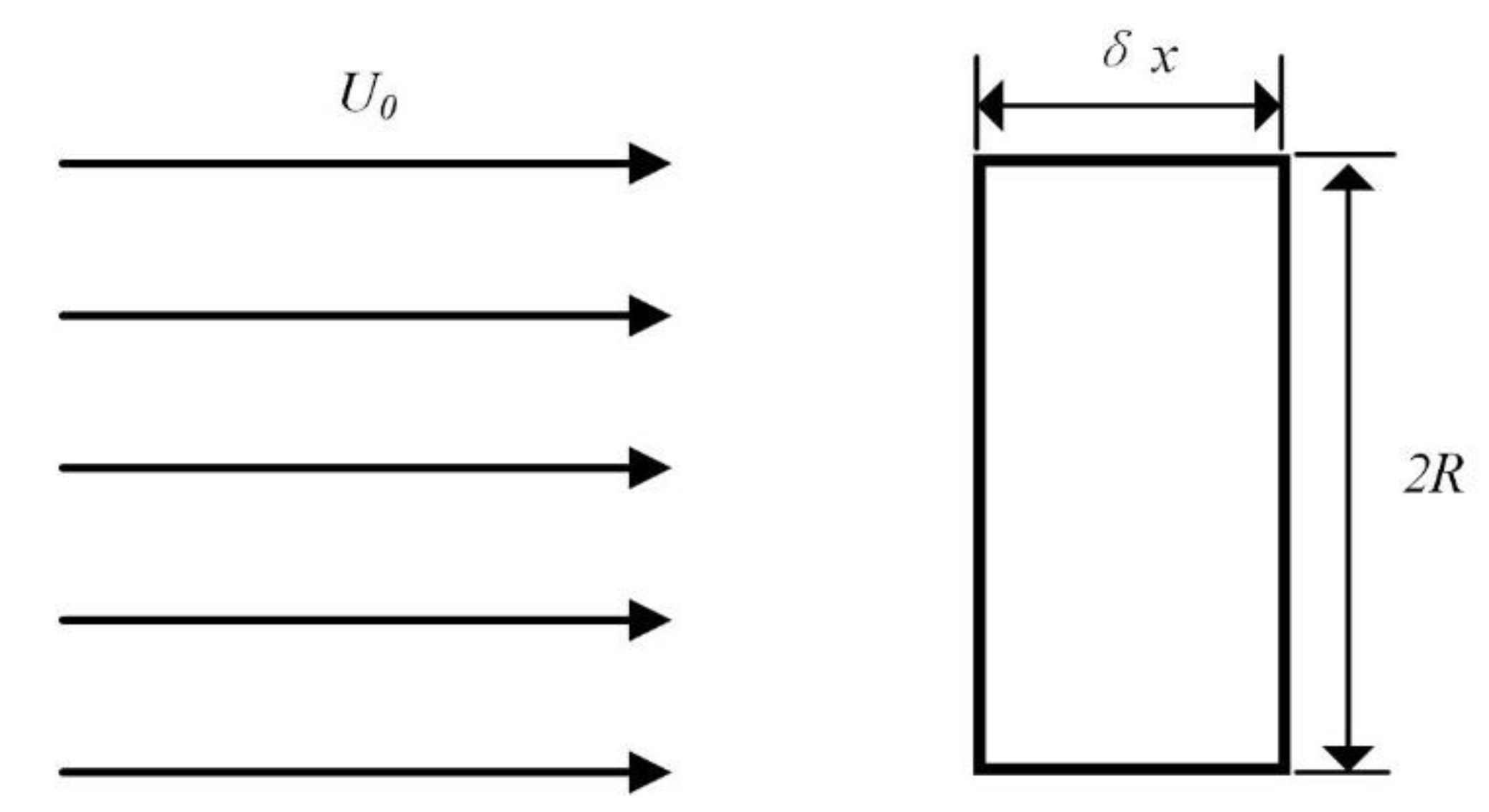
2.2. Airflow Power Density Model for Offshore Wind Field
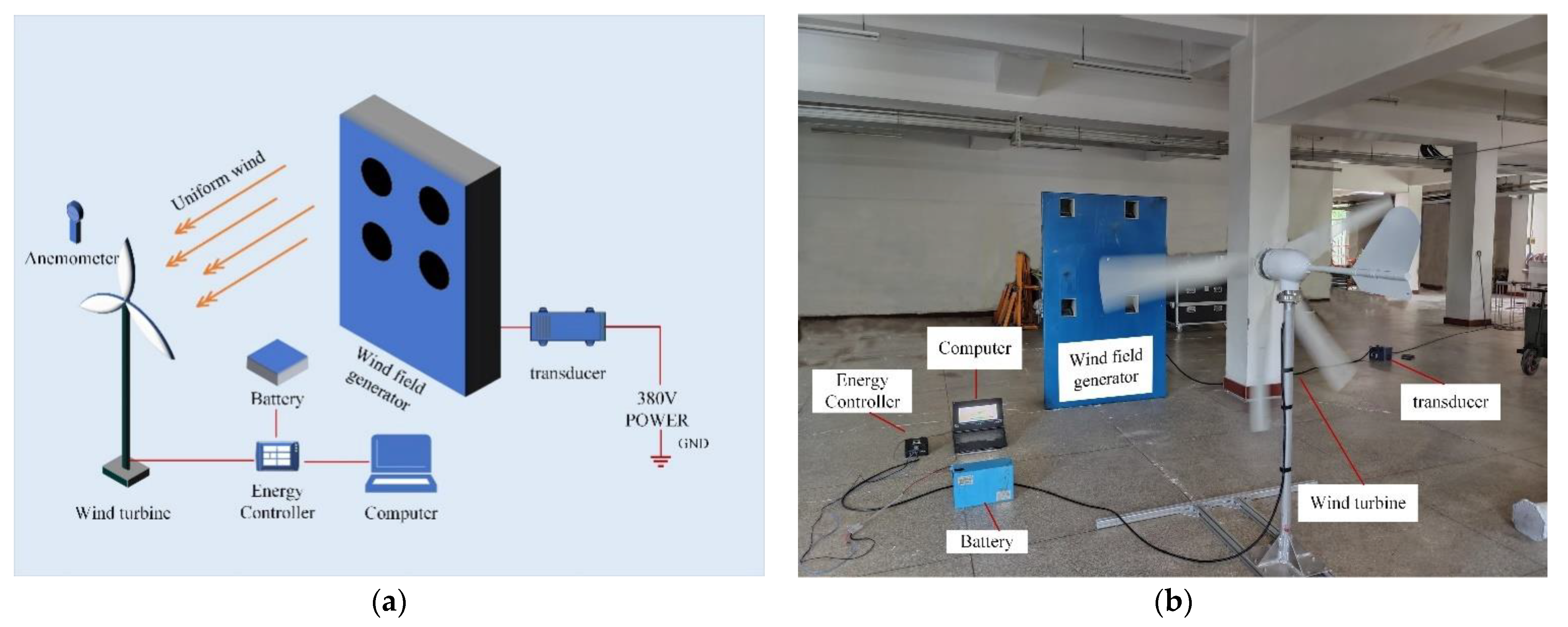
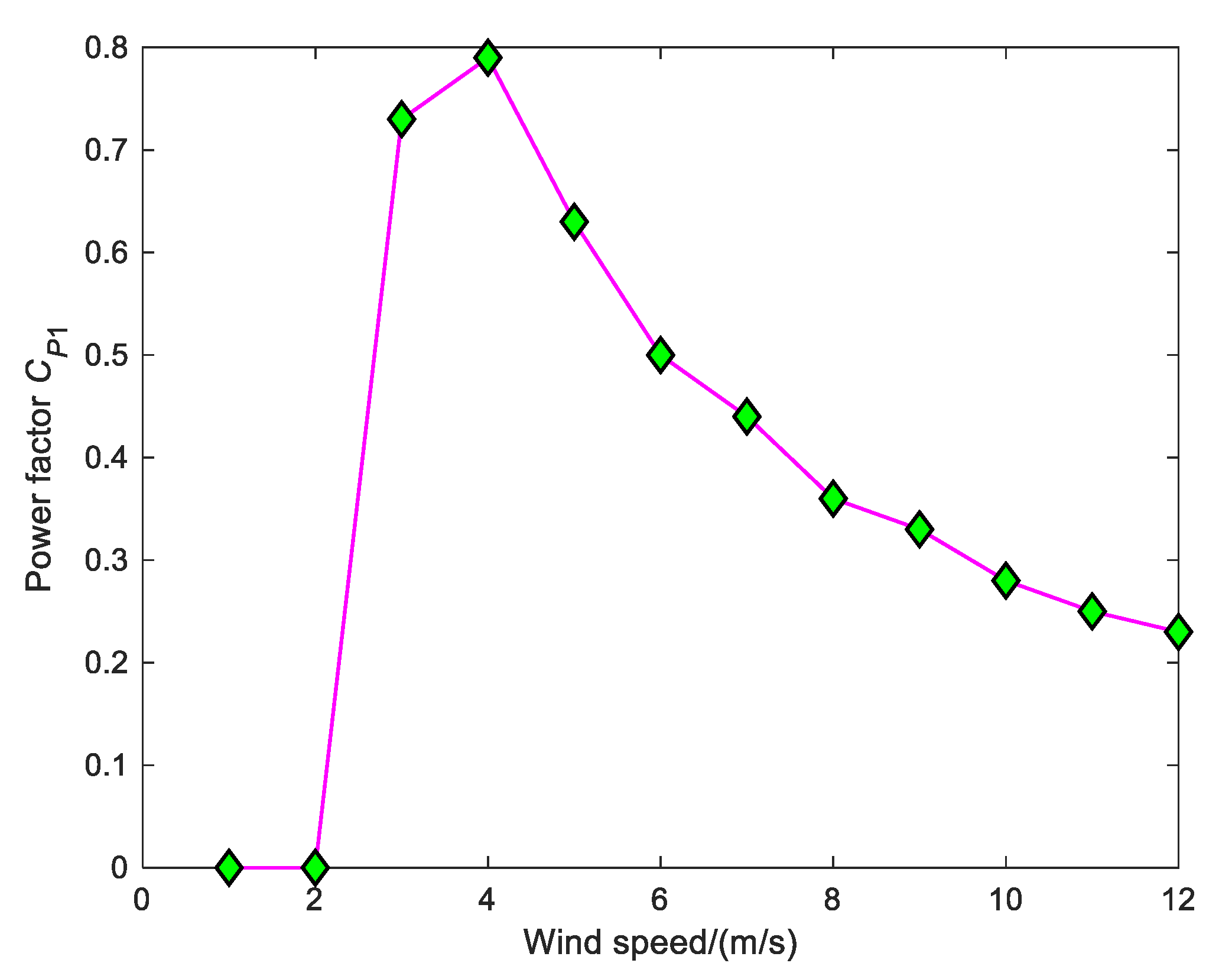
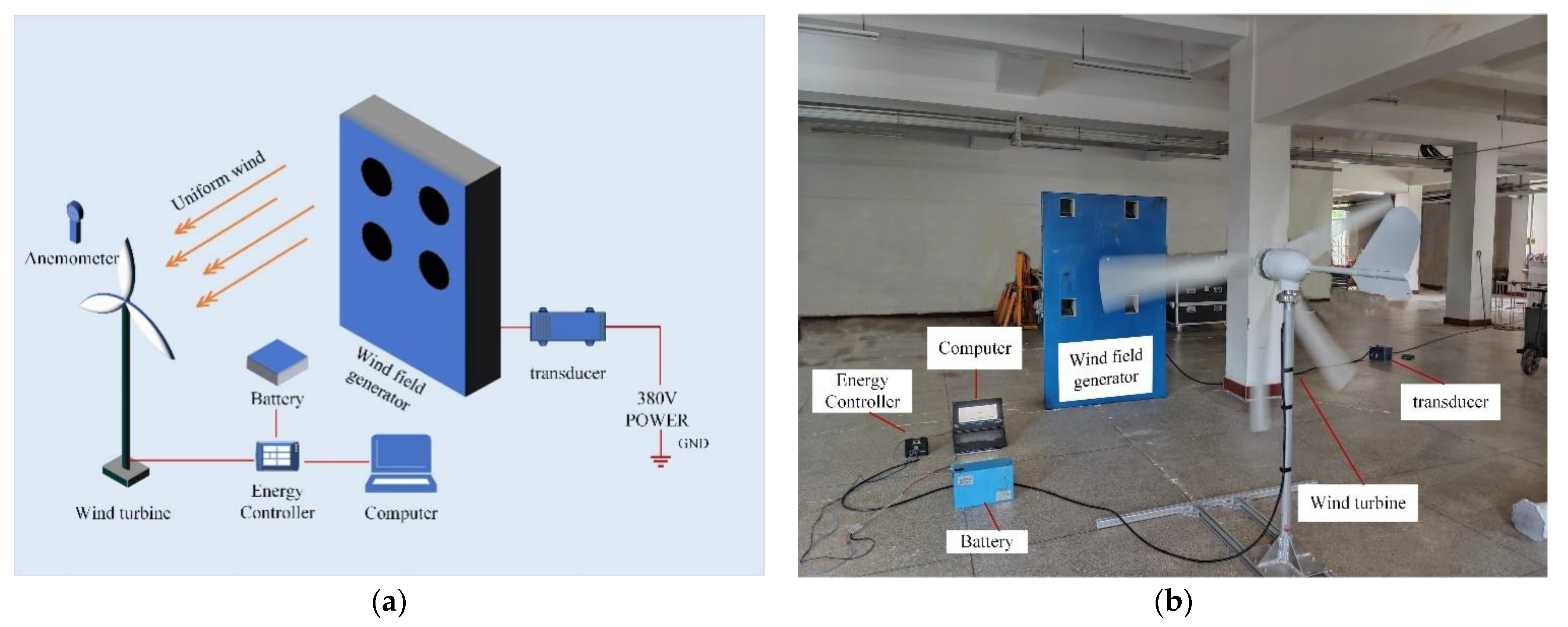
2.3. Wind Energy Capture Experiment
3. Design of Path Planning Method Considering Wind Energy Capture
3.1. Energy Input and Output Model of NSV System Considering Wind Energy Capture
3.1.1. NSV System Energy Input Model
3.1.2. NSV System Energy Output Model
3.1.3. NSV System Energy Net Output Model
3.2. Dynamic Path Planning in A Time-Varying Wind Field Environment
3.3. DW–Dijkstra Algorithm Design
| Algorithm 1: DW–Dijkstra algorithm pseudo code. | |
| Input: start node, end node | |
| 1. | while Sea state is change do |
| 2. | = , = , update , , Path_search( ) |
| 3. | function Path_list = Path_search(, , , ) |
| 4. | According to the forecast define: wind state( ), wave state( ) |
| 5. | OPEN_list:= , where |
| 6. | CLOSE_list:= { } |
| 7. | while OPEN_list is not empty do |
| 8. | current node := the node in the OPEN_list with the lowest |
| 9. | if break |
| 10. | Remove from OPEN_list and add it to CLOSE_list |
| 11. | for each adjacent node, of do |
| 12. | if ‖ CLOSE_list continue |
| 13. | if OPEN_list |
| 14. | add into OPEN_list |
| 15. | the parent node of , |
| 16. | calculate |
| 17. | if OPEN_list |
| 18. | |
| 19. | if continue |
| 20. | else |
| 21. |
|
| 22. | Resort and keep OPEN_list sorted by values |
| 23. | |
| 24. | Path_list: = |
| 25. | While do |
| 26. | |
| 27. | Path_list={Path_list,} |
| 28. | flip(Path_list) |
| 29. | Return: Path_list |
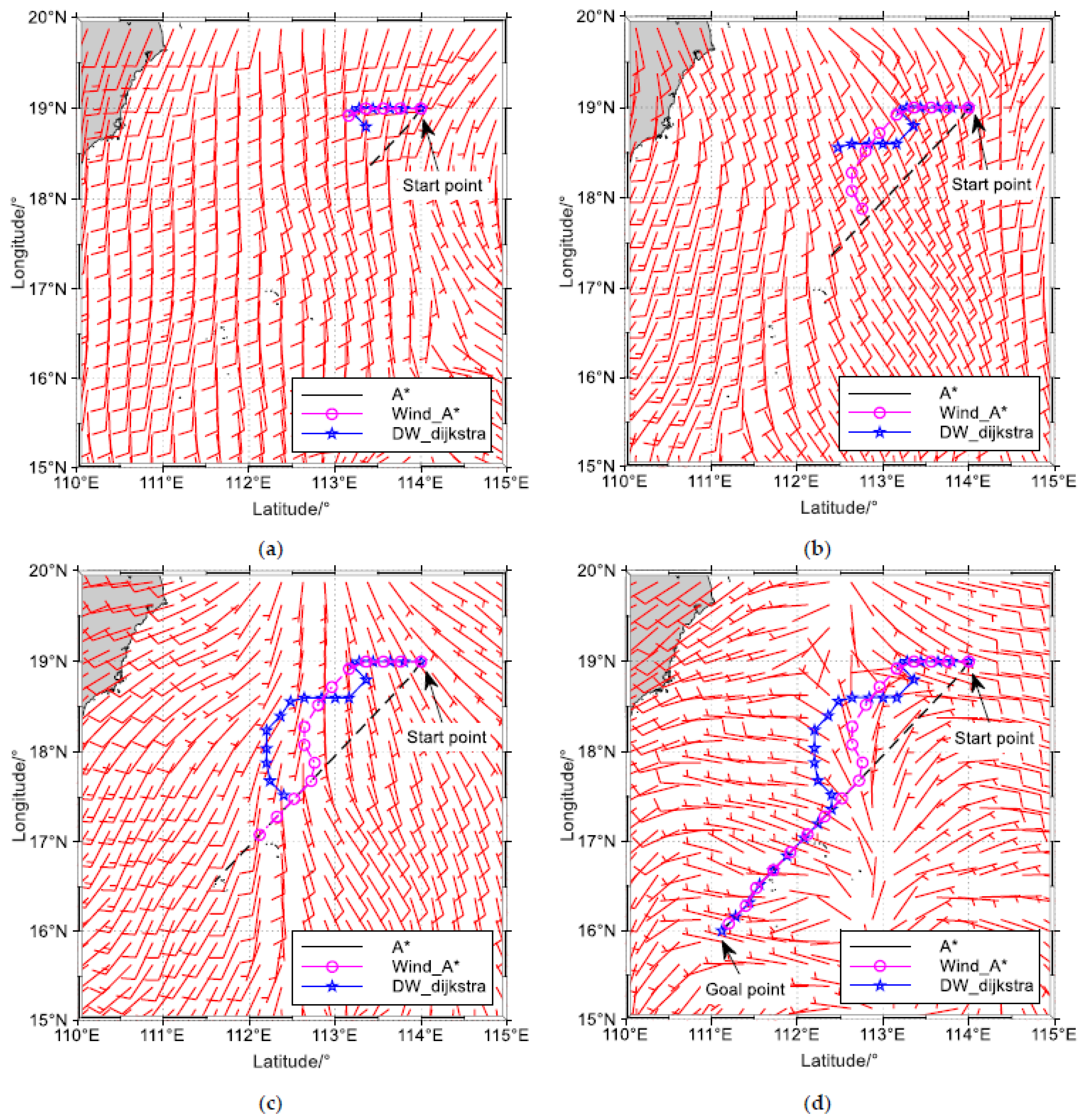
4. Algorithm Comparison Simulation Research
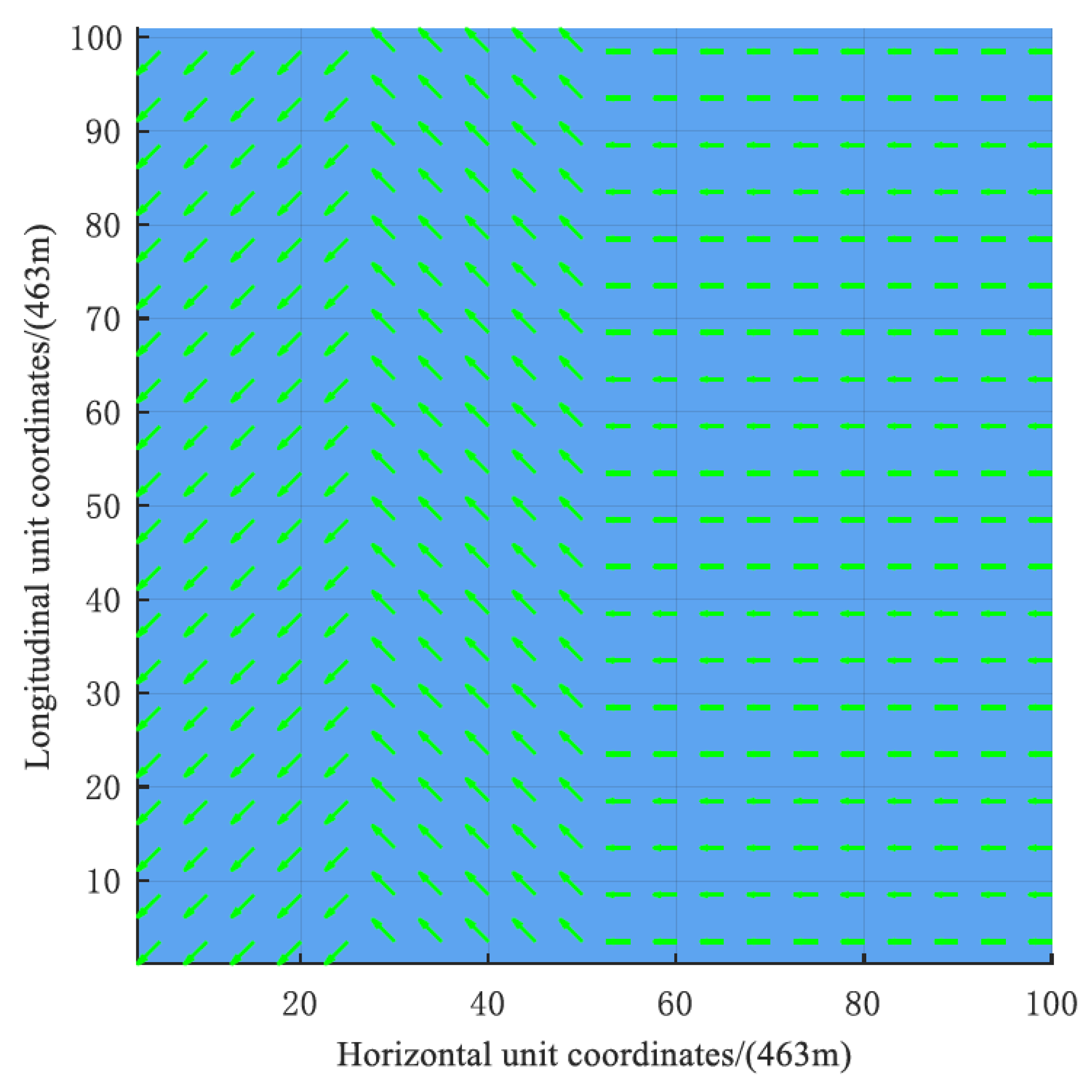
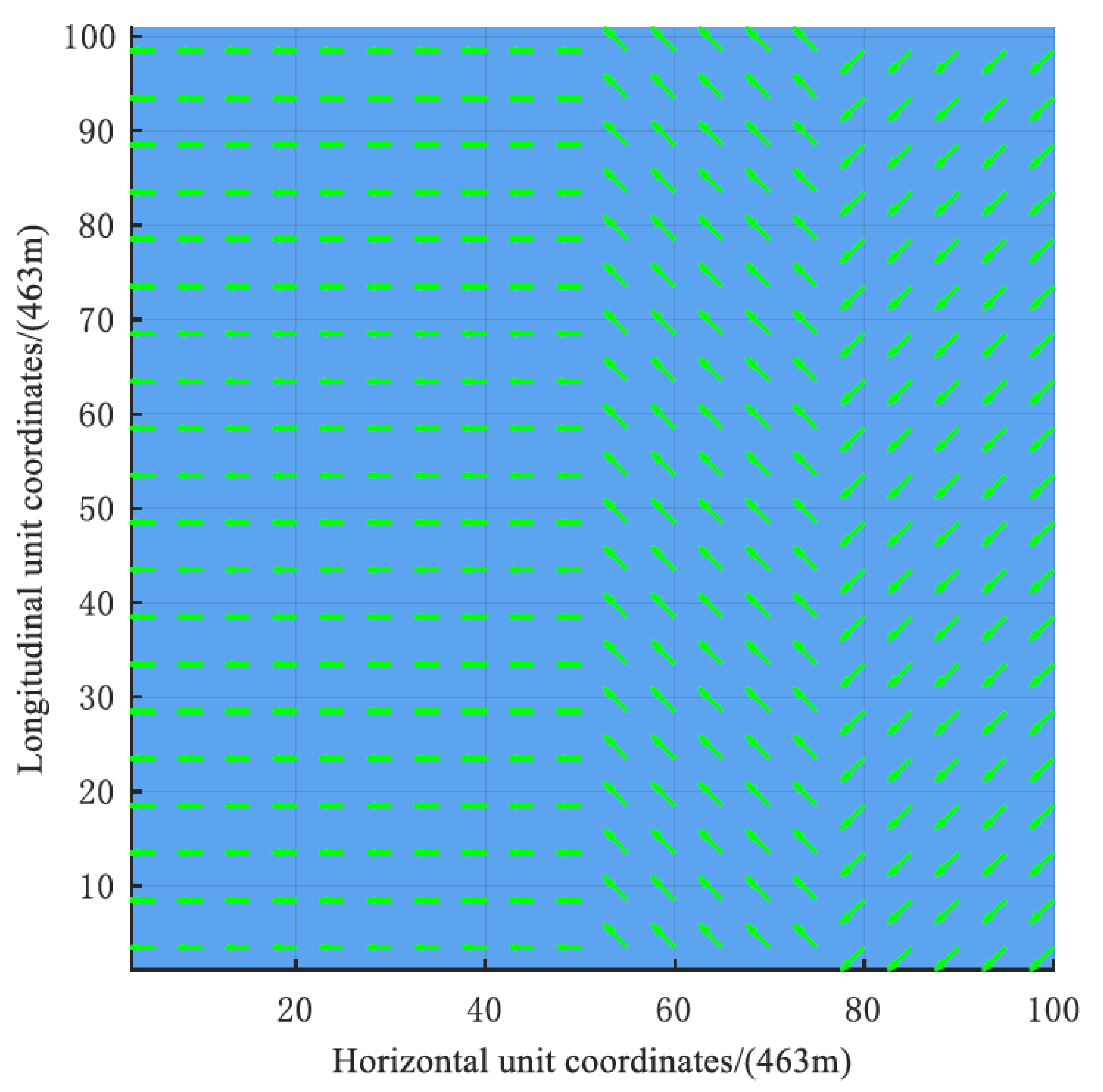
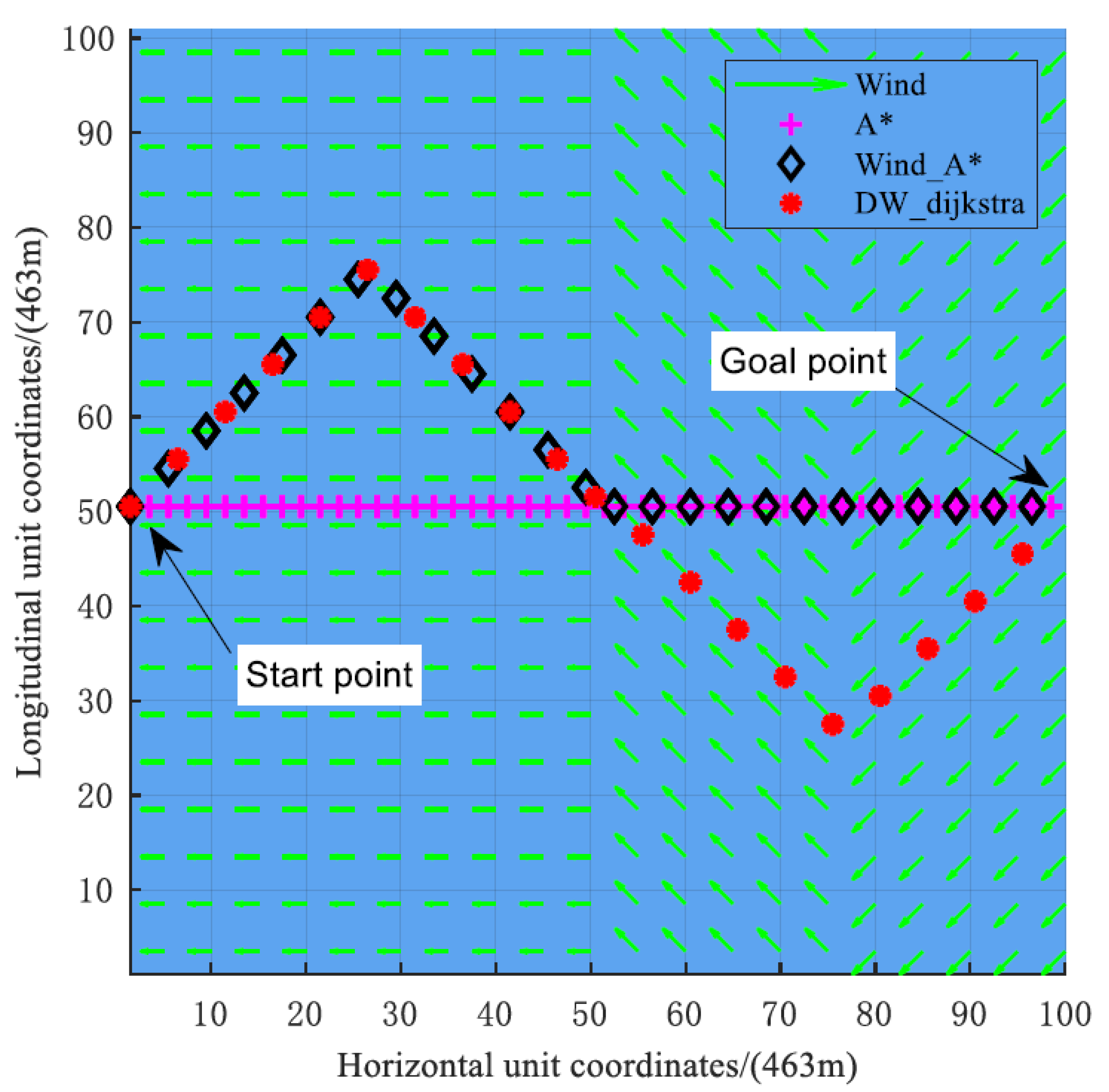
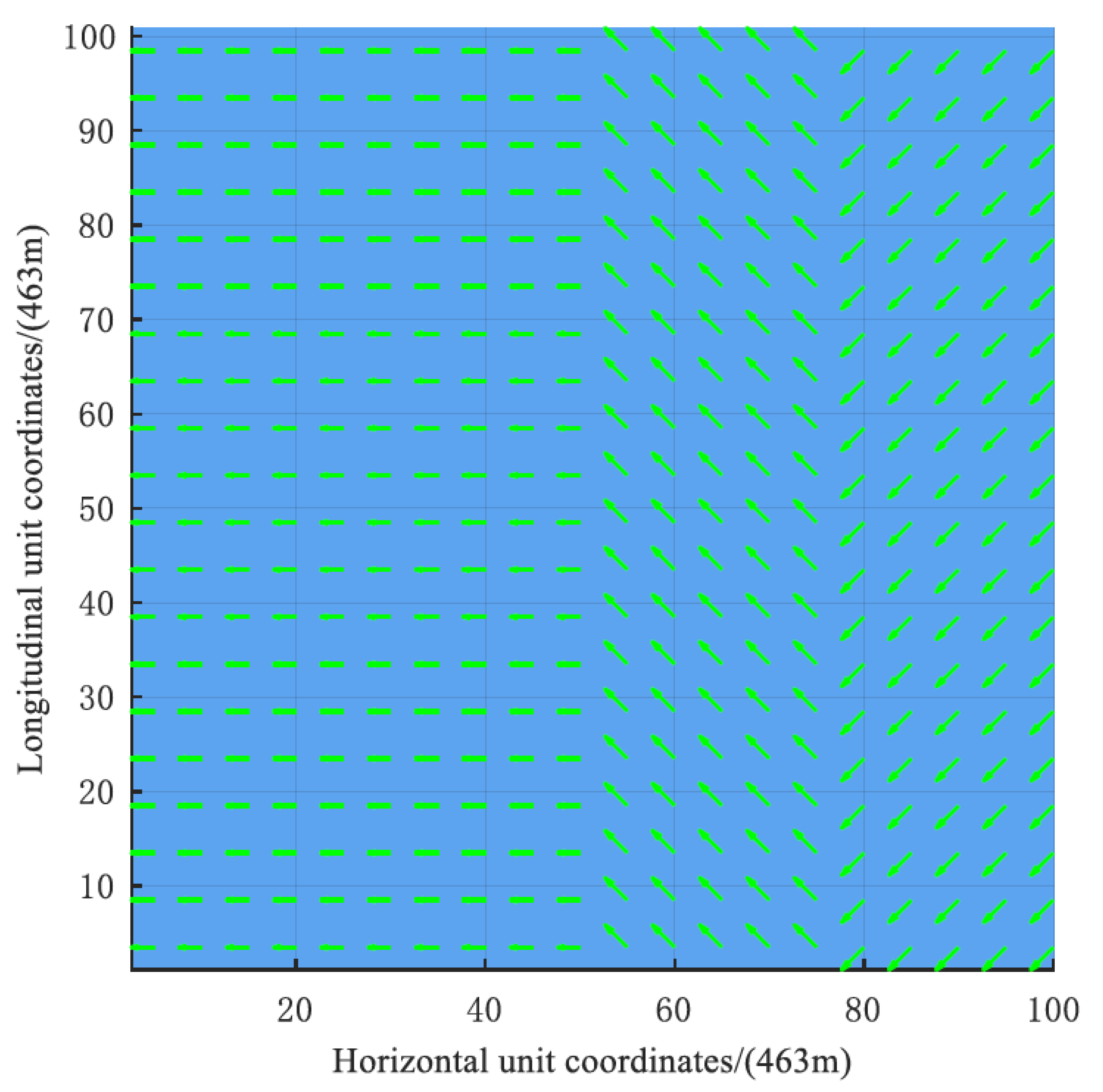
4.1. Simulation Comparison of Artificial Time-Varying Wind Field Environment
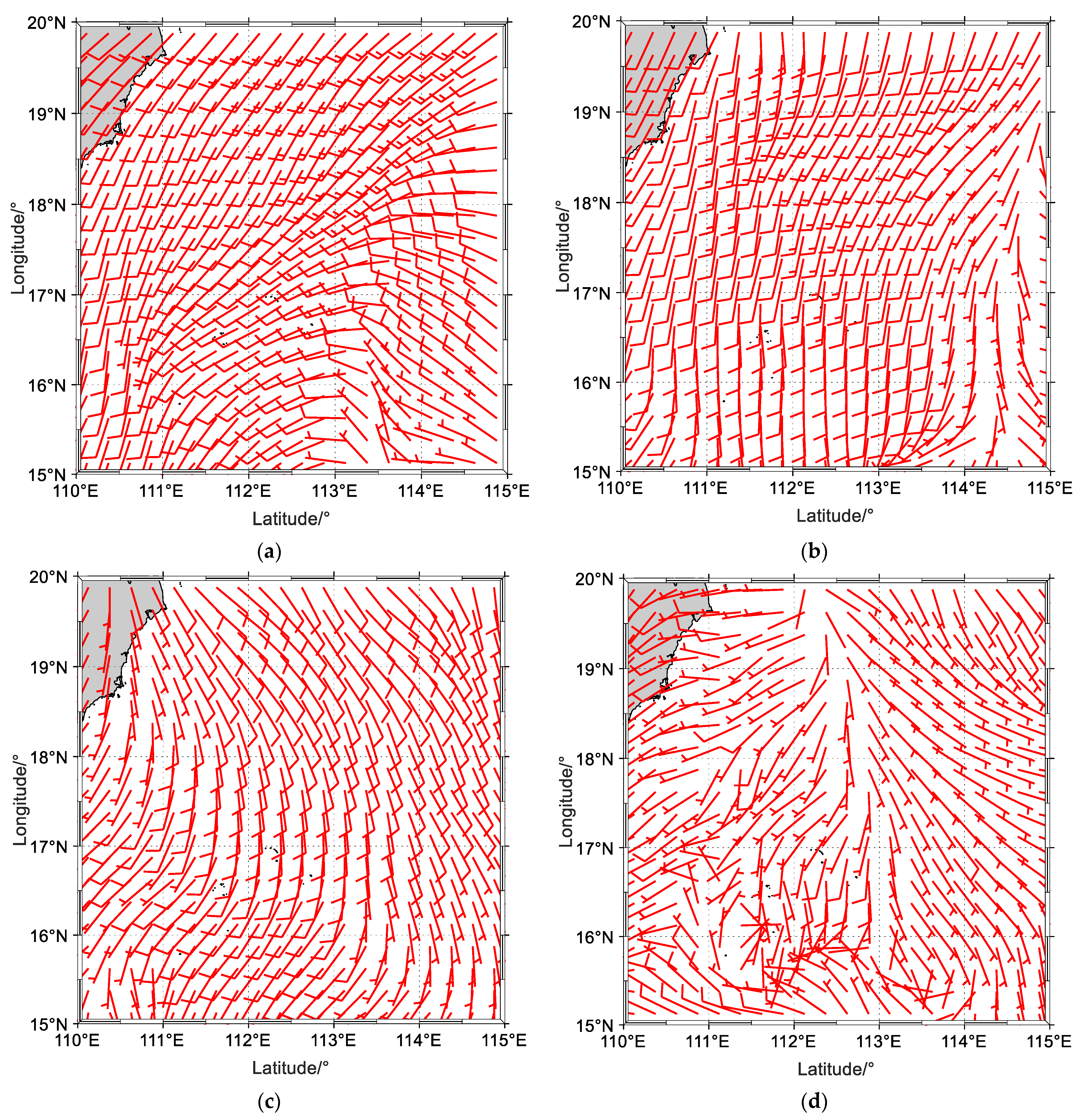
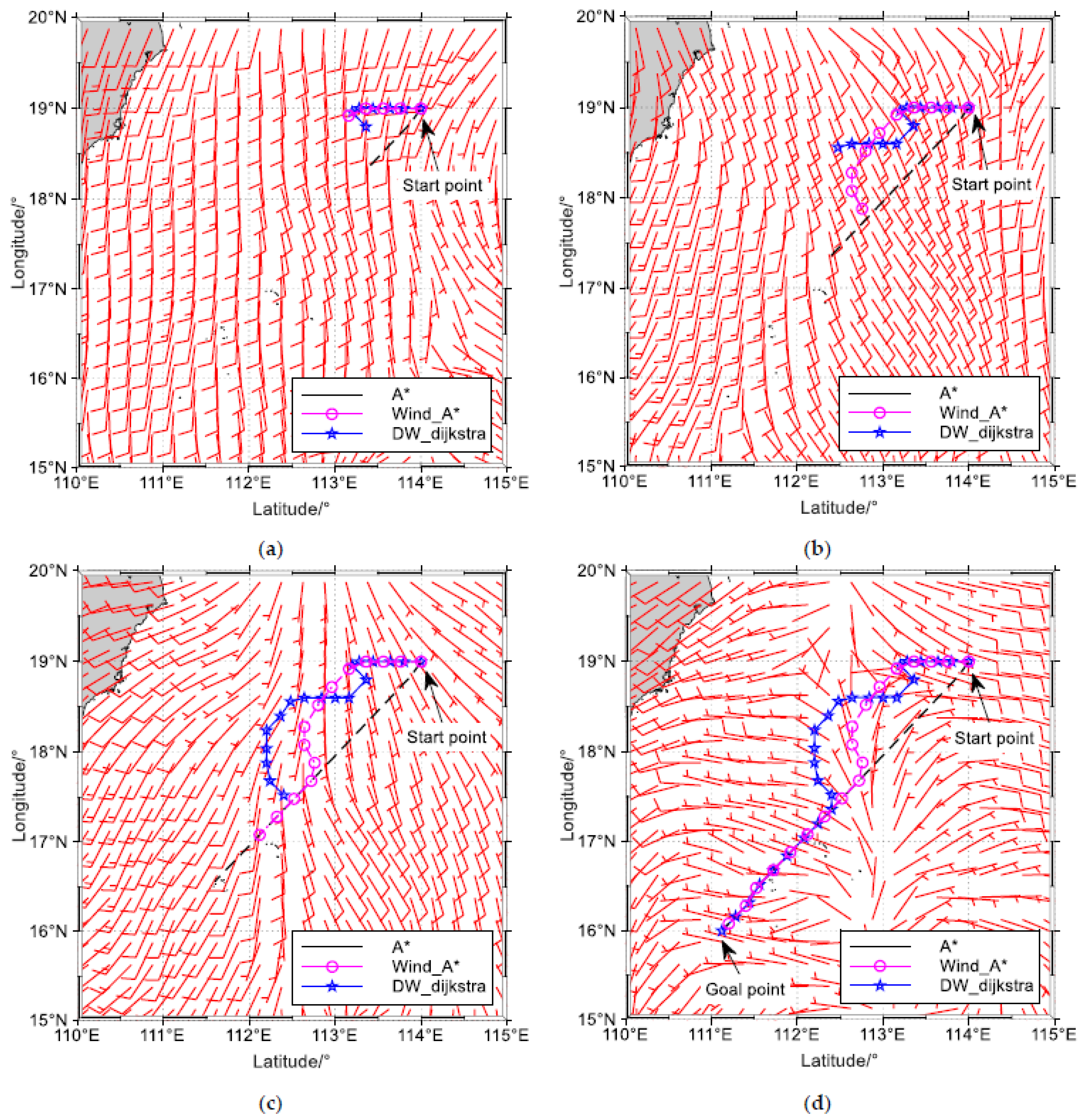
4.2. Semi-Physical Simulation Comparison of Real Time-Varying Wind Field Environment
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable Name | Variable Meaning |
|---|---|
| Wind turbine circular blade disk area | |
| Wind turbine blade radius | |
| Airflow density | |
| Airflow velocity | |
| The kinetic energy passing through the wind wheel | |
| Airflow power of offshore wind field | |
| Airflow power density of offshore wind field | |
| The energy power obtained by the wind energy capture system | |
| Power coefficient | |
| Power coefficient considering the conversion loss of kinetic energy produced by air to electric energy | |
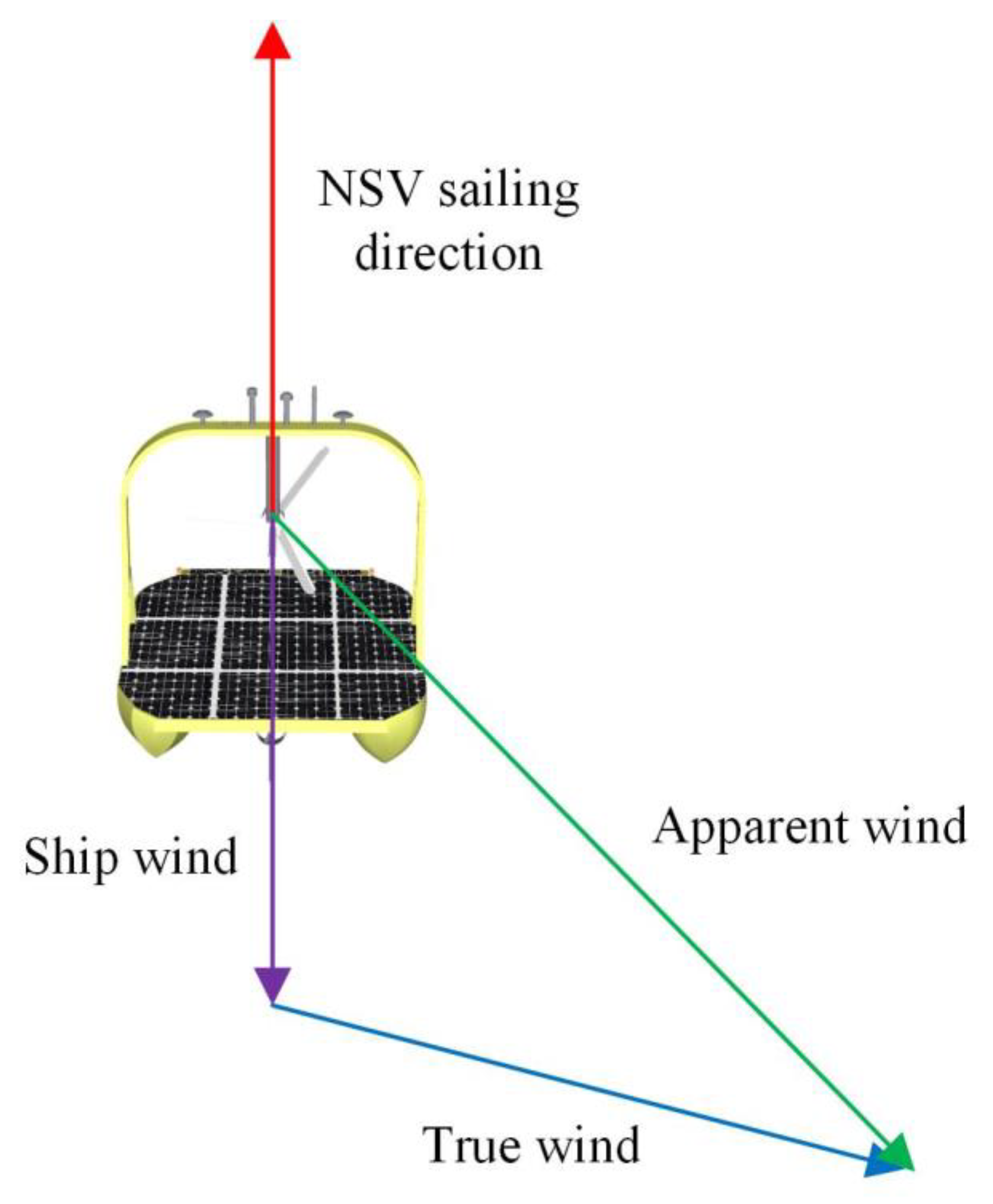
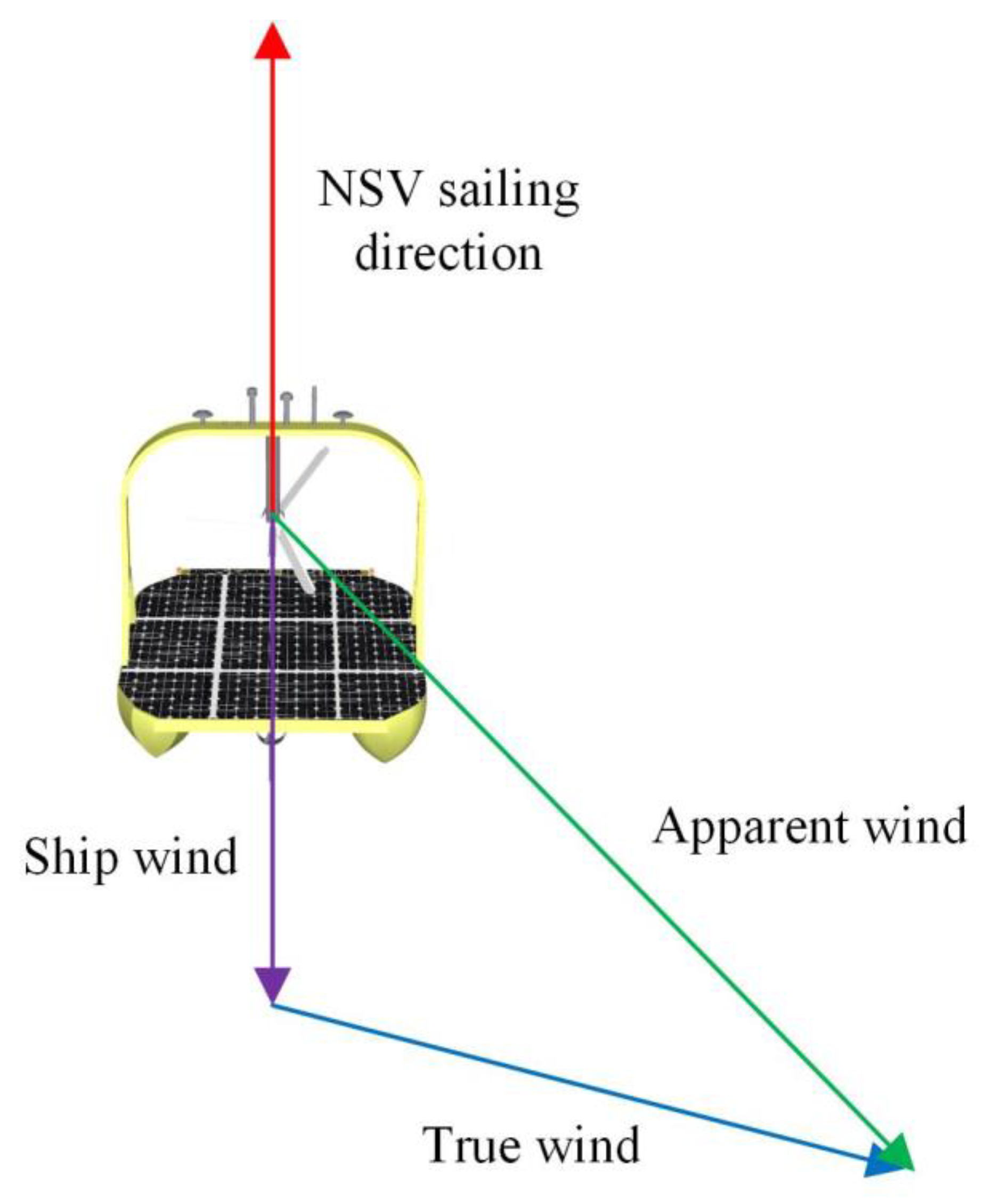
| Apparent wind | |
| Ship wind | |
| True wind | |
| The energy input power of NSV | |
| The angle between the apparent wind and the bow of NSV | |
| The longitudinal wind force on the NSV | |
| Gravitational acceleration | |
| The longitudinal wave resistance of the NSV | |
| Significant wave height | |
| Average wavelength | |
| Average wave period | |
| The angle between the wave direction and the bow of the NSV | |
| The thrust force generated by the NSV thruster | |
| The average working power of each sensor and control system of NSV | |
| Thruster power when thrust is | |
| The total output power of NSV | |
| The net energy consumption of NSV |
References
- Xu, P.F.; Cheng, C.; Cheng, H.X. Identification-based 3 DOF model of unmanned surface vehicle using support vector machines enhanced by cuckoo search algorithm. Ocean Eng. 2020, 197, 1–11. [Google Scholar] [CrossRef]
- Peng, Z.H.; Wang, J.; Wang, D. An overview of recent advances in coordinated control of multiple autonomous surface vehicles. IEEE Trans. Ind. Inform. 2020, 17, 732–745. [Google Scholar] [CrossRef]
- Zheng, C.W.; Pan, J. Assessment of the global ocean wind energy resource. Renew. Sustain. Energy Rev. 2014, 33, 382–391. [Google Scholar] [CrossRef]
- Rynne, P.F.; Ellenrieder, K.D.V. Unmanned Autonomous Sailing: Current Status and Future Role in Sustained Ocean Observations. Mar. Technol. Soc. J. 2009, 43, 21–30. [Google Scholar] [CrossRef]
- Yu, J.C.; Sun, Z.Y.; Zhang, A.Q. The Present Status of Environmental Energy Harvesting and Utilization Technology of marine Robots. Robot 2018, 40, 91–103. [Google Scholar]
- Rynne, P.F.; Von Ellenrieder, K.D. A Wind and Solar-Powered Autonomous Surface Vehicle for Sea Surface Measurements; OCEANS: Piscataway, NJ, USA, 2008; pp. 2110–2115. [Google Scholar]
- ELKAIMGH. System Identification for Precision Control of a Wing Sailed GPS-Guided Catamaran. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2002.
- HWT X-3 Production Vessel Design. Available online: http://www.harborwingtech.com/HWT-X-3-Production-Design.htm (accessed on 29 December 2017).
- Submaran™ S10: Wind and Solar-Powered Freedom to go Further and Faster. Available online: http://www.oceanaero.us/Ocean-Aero-Submaran (accessed on 22 October 2017).
- Hook, D.; Daltry, R.; Coelho, R. C-Enduro USV Developed for Offshore Long-Endurance Appllications ASV Designs Vehicle for UK NOC’s LEMUSV Concept. Sea Technol. 2014, 55, 15–17. [Google Scholar]
- Jiang, Q.Q.; Li, K.; Liao, Y.L. Model-free Adaptive Speed Control Method of Natural Energy-driven Unmanned Surface Vehicle. Unmanned Syst. Technol. 2020, 3, 37–42. [Google Scholar]
- You, X.; Ma, F.; Huang, M. Study on the MMG three-degree-of-freedom motion model of a sailing vessel. In Proceedings of the 2017 4th International Conference on Transportation Information and Safety (ICTIS), Banff, AB, Canada, 8–10 August 2017; pp. 395–399. [Google Scholar]
- Luo, X. Conception Researchand Validation of Intelligent Green Autonomous Sailboat. Ph.D. Thesis, Shanghai Jiao Tong University, Shanghai, China, 2017. [Google Scholar]
- Ma, B.Y. Study on Surface Sailing Characteristics of the Wind Powered Vehicle with Deployable/Foldable Wing Sail. Ph.D. Thesis, Tianjin University, Tianjin, China, 2018. [Google Scholar]
- Zhang, H.N. Automatic Generation and Path Planning of Unmanned Boat Routes Based on Ant Colony Optimization Algorithm. Ship Electron. Eng. 2019, 39, 46–49, 97. [Google Scholar]
- Mousazadeh, H.; Kiapey, A. Experimental Evaluation of a New Developed Algorithm for An Autonomous Surface Vehicle and Comparison with Simulink Results. China Ocean Eng. 2019, 33, 268–278. [Google Scholar] [CrossRef]
- Paravisi, M.; Santos, D.H.; Jorge, V. Unmanned Surface Vehicle Simulator with Realistic Environmental Disturbances. Sensors 2019, 19, 68. [Google Scholar] [CrossRef] [Green Version]
- Dos, S.D.H.; Goncalves, L.M.G. A gain-scheduling control strategy and short-term path optimization with genetic algorithm for autonomous navigation of a sailboat robot. Int. J. Adv. Robot. Syst. 2019, 16, 1–15. [Google Scholar]
- Du, M.S.; Xu, J.S. Study of Long-term Route Planning for Autonomous Sailboat. Ship Eng. 2018, 40, 11–14, 88. [Google Scholar]
- Andouglas, G.D.S.J.; Santos, D.H.D.; Negreiros, A.P.F.D. High-Level Path Planning for an Autonomous Sailboat Robot Using Q-Learning. Sensors 2020, 20, 1550–1571. [Google Scholar]
- Yu, J.C.; Sun, Z.Y.; Zhang, A.Q. Research Status and Prospect of Autonomous Sailboats. J. Mech. Eng. 2018, 54, 112–124. [Google Scholar] [CrossRef]
- Niu, H.L.; Lu, Y.; Savvaris, A. Efficient Path Planning Algorithms for Unmanned Surface Vehicle. IFAC Pap. 2016, 49, 121–126. [Google Scholar] [CrossRef]
- Niu, H.L.; Ji, Z.; Savvaris, A. Energy efficient path planning for Unmanned Surface Vehicle in spatially-temporally variant environment. Ocean Eng. 2020, 196, 106766. [Google Scholar] [CrossRef]
- Song, R.; Liu, Y.; Bucknall, R. A multi-layered fast marching method for unmanned surface vehicle path planning in a time-variant maritime environment. Ocean Eng. 2017, 129, 301–317. [Google Scholar] [CrossRef]
- Singh, Y.; Sharma, S.; Sutton, R. Optimal path planning of an unmanned surface vehicle in a real-time marine environment using a Dijkstra algorithm. Marine Navigation. In Proceedings of the International Conference on Marine Navigation and Safety of Sea Transportation, Gdynia, Poland, 21–23 June 2017; Weintrit, A., Ed.; CRC Press/Balkema: Plymouth, UK, 2017; pp. 399–402. [Google Scholar]
- Singh, Y.; Sharma, S.; Sutton, R. A constrained A* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and ocean currents. Ocean Eng. 2018, 169, 187–201. [Google Scholar] [CrossRef] [Green Version]
- Jia, Q.; Liao, Y.L.; Pang, S. Route Planning Method of Natural Energy Driven Unmanned Surface Vehicle Considering Wind Energy Capture. China Patent 2020111040258, 15 October 2020. [Google Scholar]
- Jia, Q.; Liao, Y.L.; Pang, S. NSV long endurance path planning method considering wind energy capture. J. Cent. South Univ. (Nat. Sci. Ed.). in press.
- Liang, X.; Li, L.; Wu, J. Mobile robot path planning based on adaptive bacterial foraging algorithm. J. Cent. South Univ. 2013, 20, 3391–3400. [Google Scholar] [CrossRef]
- Raja, P.; Abhilash, M.; Ravi Shanker, K. Quadrant based incremental planning for mobile robots. J. Cent. South Univ. 2014, 21, 1792–1803. [Google Scholar] [CrossRef]
- Elfes, A. Using occupancy grids for mobile robot perception and navigation. Computer 1989, 22, 46–57. [Google Scholar] [CrossRef]
- A Global Self-Consistent, Hierarchical, High-Resolution Geography Database(GSHHG). Available online: http://www.soest.hawaii.edu/wessel/gshhg/ (accessed on 15 June 2017).
- Atmospheric Model High Resolution 10-Day Forecast (Set I-HRES). Available online: https://www.ecmwf.int/en/forecasts/dataset/atmospheric-model-high-resolution-10-day-forecast (accessed on 12 May 2021).
- Wood, D. Small Wind Turbines: Analysis, Design, and Application; Springer: Berlin, Germany, 2011; pp. 1–29. [Google Scholar]
- Burton, T.; Sharpe, D.; Jenkins, N. Wind Energy Handbook; John Wiley & Sons: Chichester, UK, 2001; pp. 11–39. [Google Scholar]
- Manwell, J.; McGowan, J.; Rogers, A. Wind Energy Explained: Theory, Design and Application; John Wiley & Sons: New York, NY, USA, 2002; pp. 83–140. [Google Scholar]
- The NSV Wind Energy Capture System; Science and Technology on Underwater Vehicle Laboratory, Harbin Engineering University: Harbin, China, 2021.
- Wen, S.C.; Yu, Z.W. Ocean Wave Theory and Calculation Principle; Science Press: Beijing, China, 1985; pp. 305–507. [Google Scholar]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- ERA5 Hourly Data on Single Levels from 1979 to Present. Available online: https://cds.climate.copernicus.eu/cdsapp#!/dataset/reanalysis-era5-single-levels?tab=overview (accessed on 14 June 2018).
- The NSV Control System; Science and Technology on Underwater Vehicle Laboratory, Harbin Engineering University: Harbin, China, 2021.



| 1 | 0 | 0.00 |
| 2 | 0 | 0.00 |
| 3 | 28.62 | 0.73 |
| 4 | 72.48 | 0.79 |
| 5 | 112.84 | 0.63 |
| 6 | 154.73 | 0.50 |
| 7 | 218.46 | 0.44 |
| 8 | 269.36 | 0.36 |
| 9 | 345.82 | 0.33 |
| 10 | 402.33 | 0.28 |
| 11 | 473.29 | 0.25 |
| 12 | 572.81 | 0.23 |
| Algorithm Name | Energy Consumption/MJ | Energy Difference With A* Algorithm/MJ | Save Energy Compared to A* Algorithm/% |
|---|---|---|---|
| A* algorithm | 2.23 | - | - |
| Wind_A* algorithm | 1.46 | 0.77 | 34.62 |
| DW–Dijkstra algorithm | 1.33 | 0.91 | 40.61 |
| Algorithm Name | Energy Consumption/MJ | Energy Difference with A* Algorithm/MJ | Save energy Compared to A* Algorithm/% |
|---|---|---|---|
| A* algorithm | 81.79 | - | - |
| Wind_A* algorithm | 74.05 | 7.74 | 9.46 |
| DW–Dijkstra algorithm | 69.24 | 12.55 | 15.34 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, Q.; Liao, Y.; Xu, P.; Wang, Z.; Pang, S.; Li, X. Long-Endurance Dynamic Path Planning Method of NSV Considering Wind Energy Capture. J. Mar. Sci. Eng. 2021, 9, 878. https://doi.org/10.3390/jmse9080878
Jia Q, Liao Y, Xu P, Wang Z, Pang S, Li X. Long-Endurance Dynamic Path Planning Method of NSV Considering Wind Energy Capture. Journal of Marine Science and Engineering. 2021; 9(8):878. https://doi.org/10.3390/jmse9080878
Chicago/Turabian StyleJia, Qi, Yulei Liao, Peihong Xu, Zixiao Wang, Shuo Pang, and Xiangjie Li. 2021. "Long-Endurance Dynamic Path Planning Method of NSV Considering Wind Energy Capture" Journal of Marine Science and Engineering 9, no. 8: 878. https://doi.org/10.3390/jmse9080878
APA StyleJia, Q., Liao, Y., Xu, P., Wang, Z., Pang, S., & Li, X. (2021). Long-Endurance Dynamic Path Planning Method of NSV Considering Wind Energy Capture. Journal of Marine Science and Engineering, 9(8), 878. https://doi.org/10.3390/jmse9080878