
Underwater Image Restoration via Non-Convex Non-Smooth Variation and Thermal Exchange Optimization




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- •
- A transmission map optimization model combining non-convex and non-smooth is proposed;
- •
- A method for adaptively selecting regularization parameters is proposed, which can update parameters while optimizing transmission maps;
- •
- An iteratively reweighted l1 (IRL1) algorithm and alternate multiplier method (ADMM) are used to solve the proposed non-convex and non-smooth model quickly and accurately;
- •
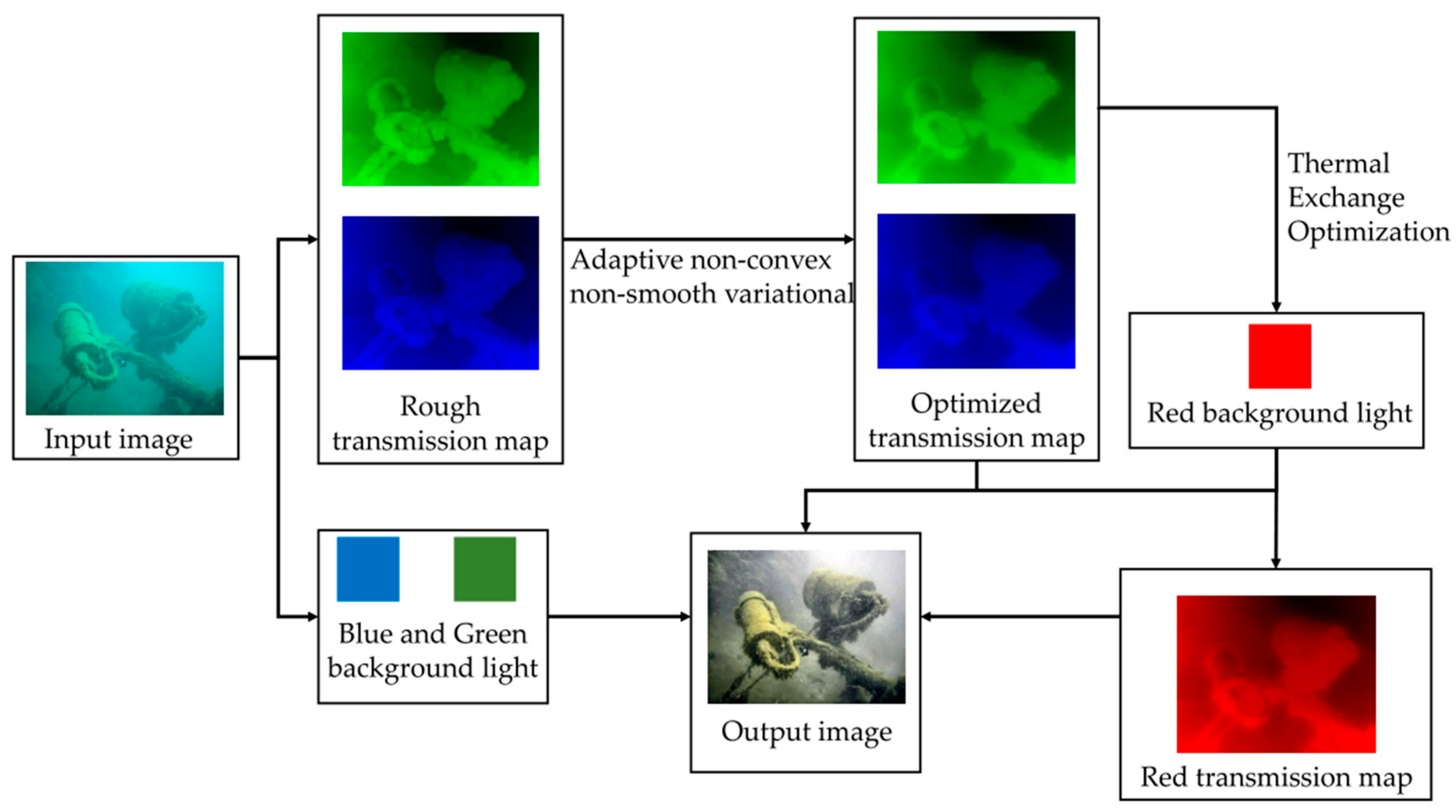
- A transmission map and the background light of the red channel compensation method is designed based on Thermal Exchange Optimization. Because the attenuation of absorption and scattering for red light is the fastest, there are errors when using the fastest attenuating channel (red channel) to estimate the transmission maps of other channels.
2. Materials and Methods
2.1. Underwater imaging and Dark Channel Prior
2.2. Thermal Exchange Optimization
2.3. Adaptive non-convex and non-smooth variational models
2.4. IRL1 and ADMM for proposed models
2.5. Red Channel Compensation Based on TEO
3. Results
3.1. Metrics
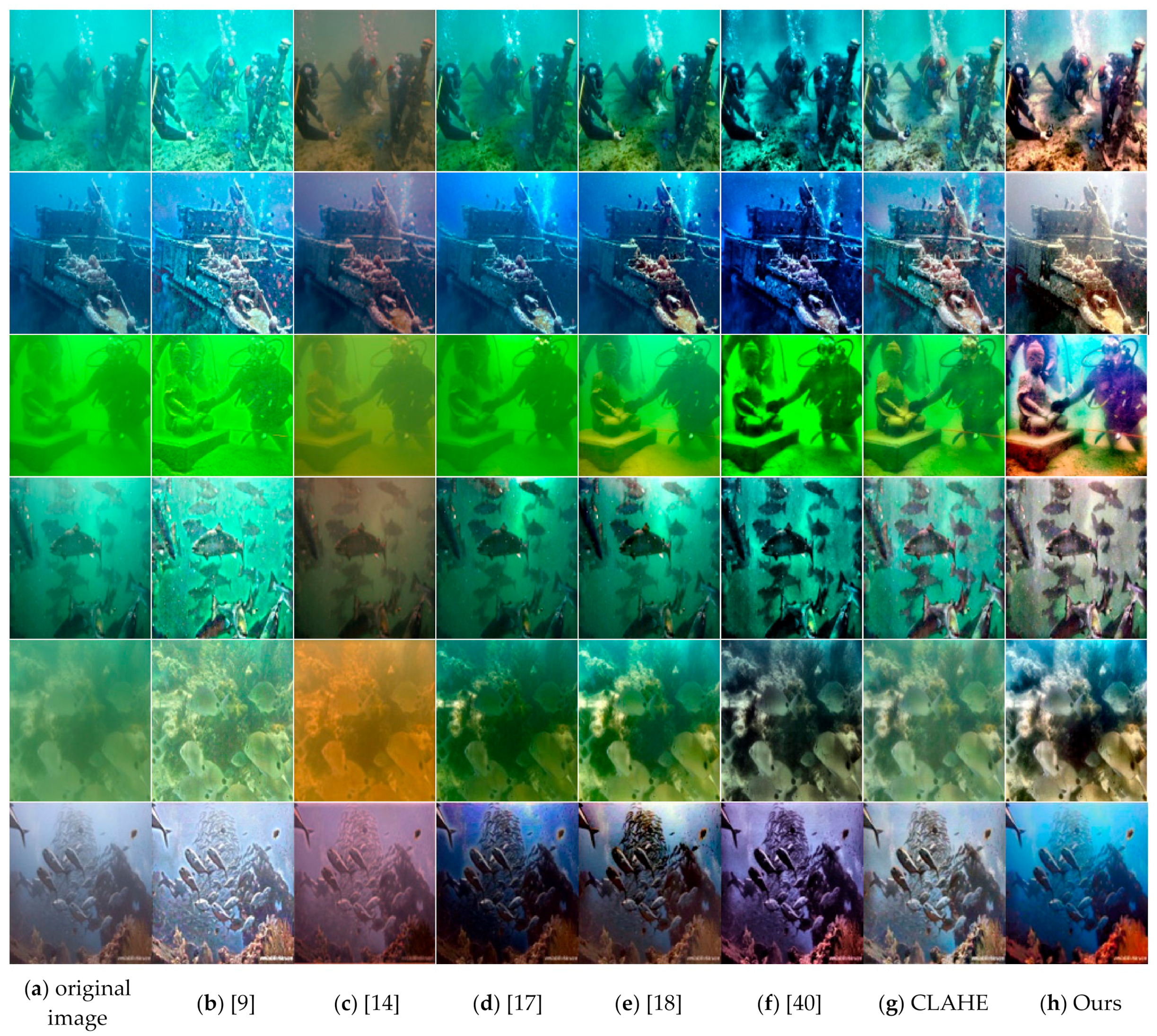
3.2. Qualitative Analysis
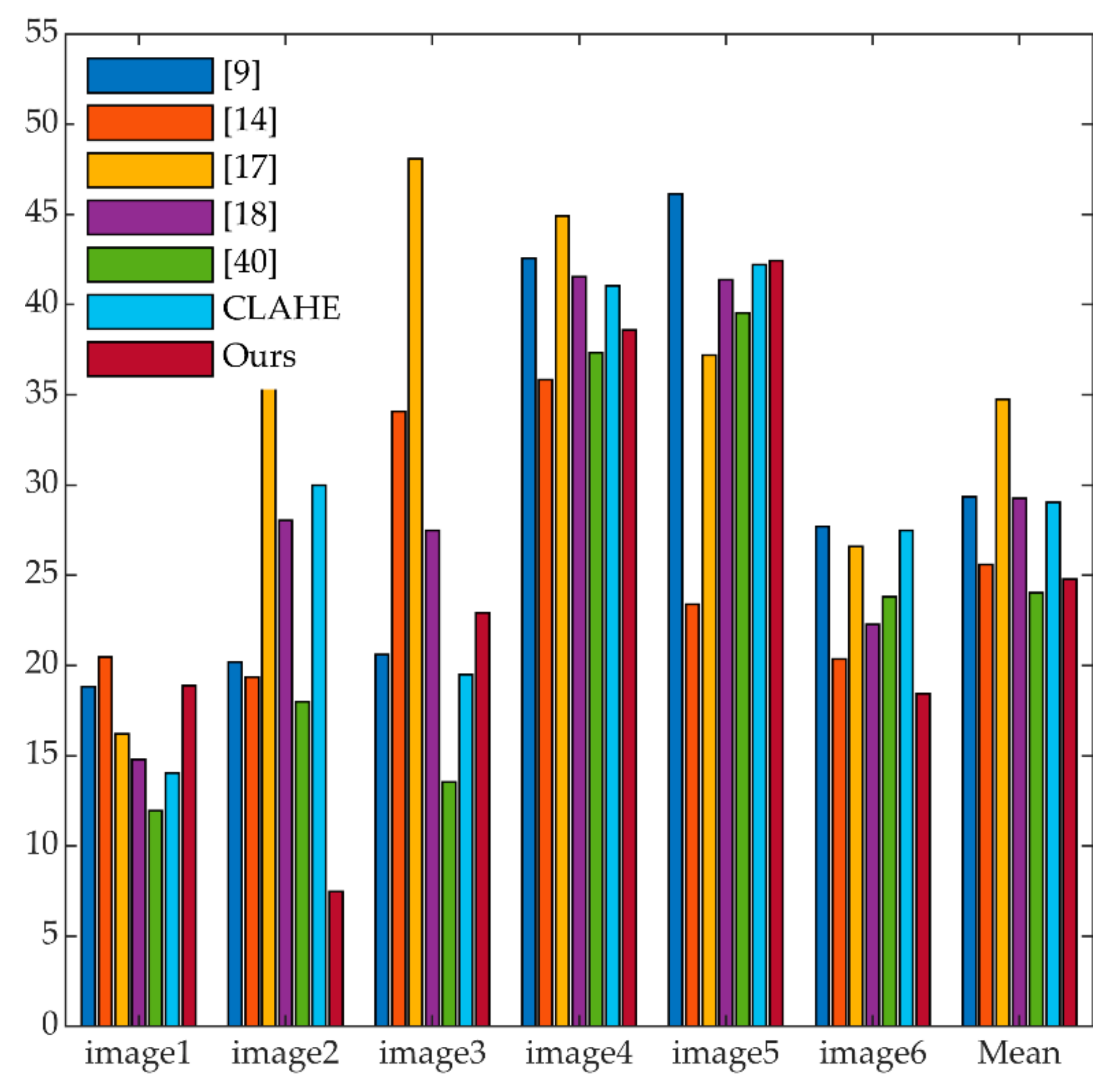
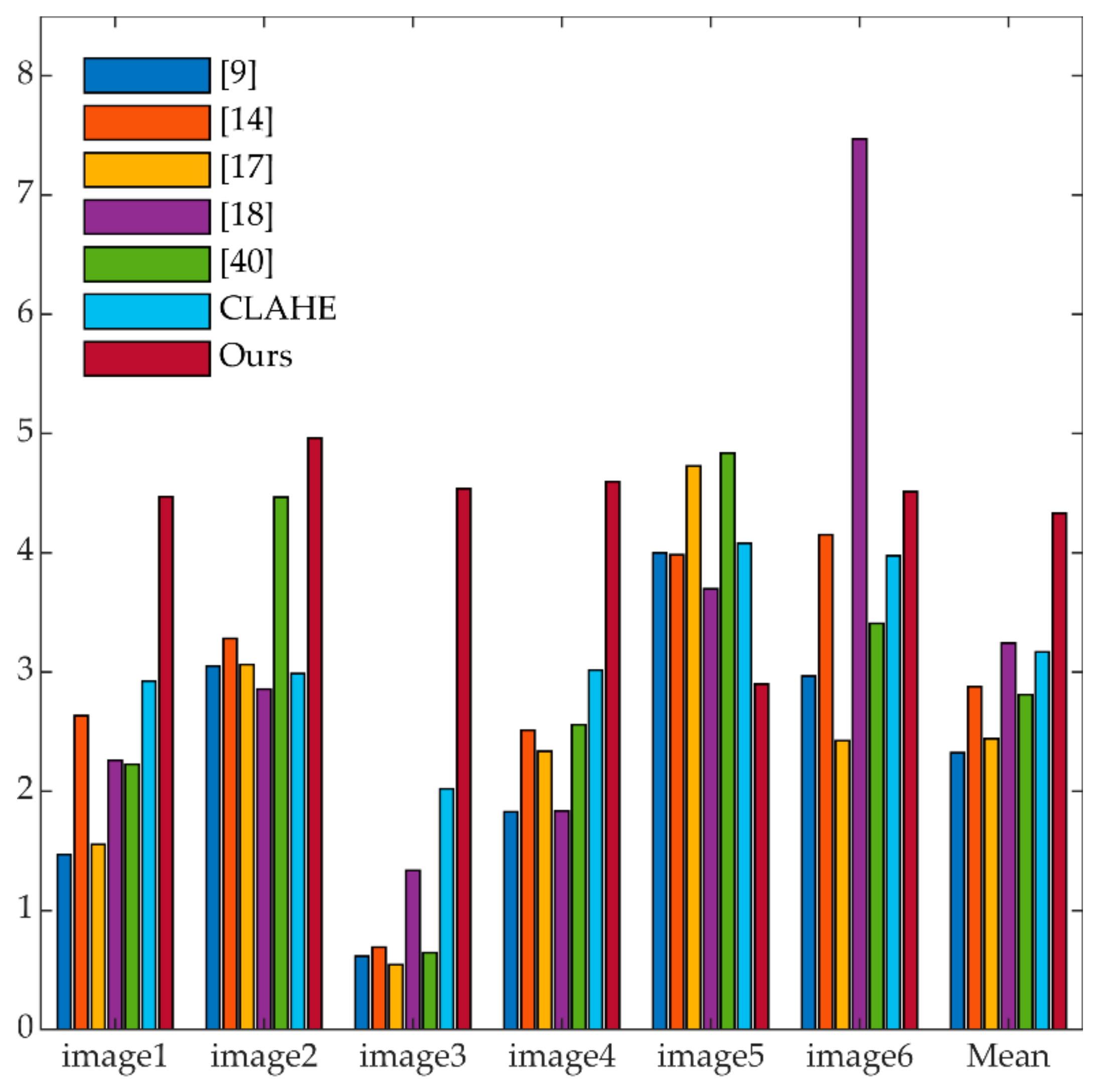
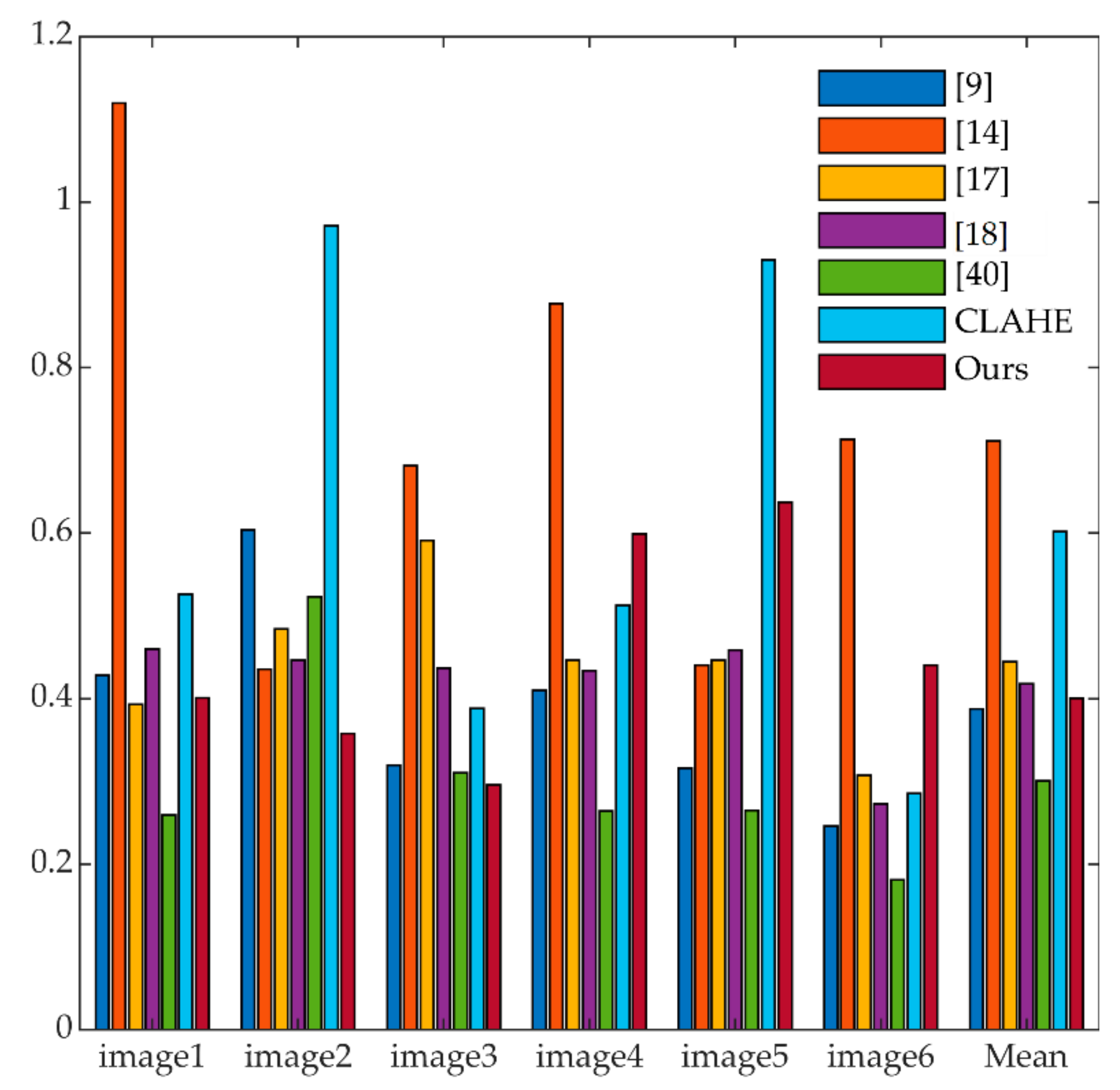
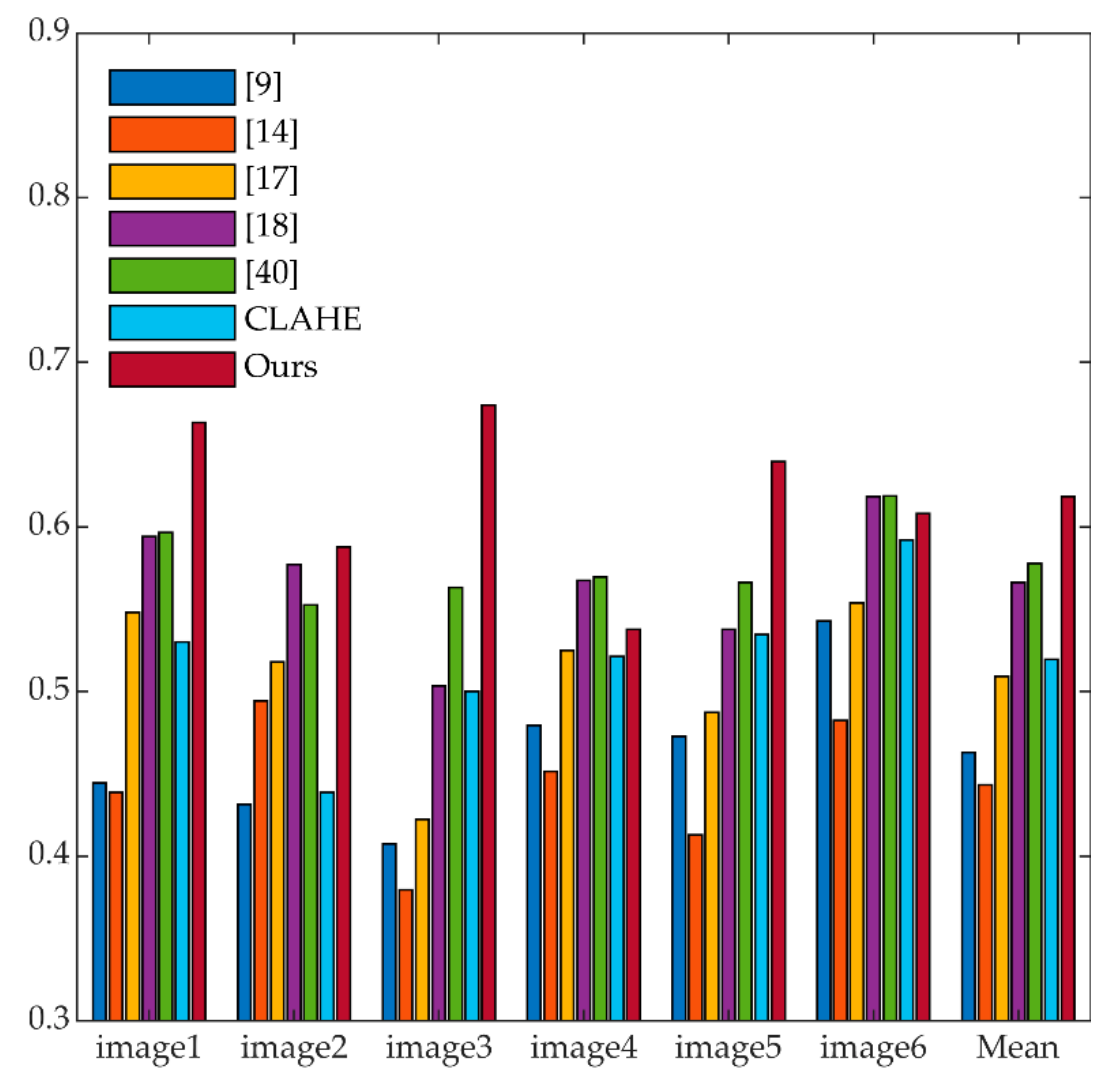
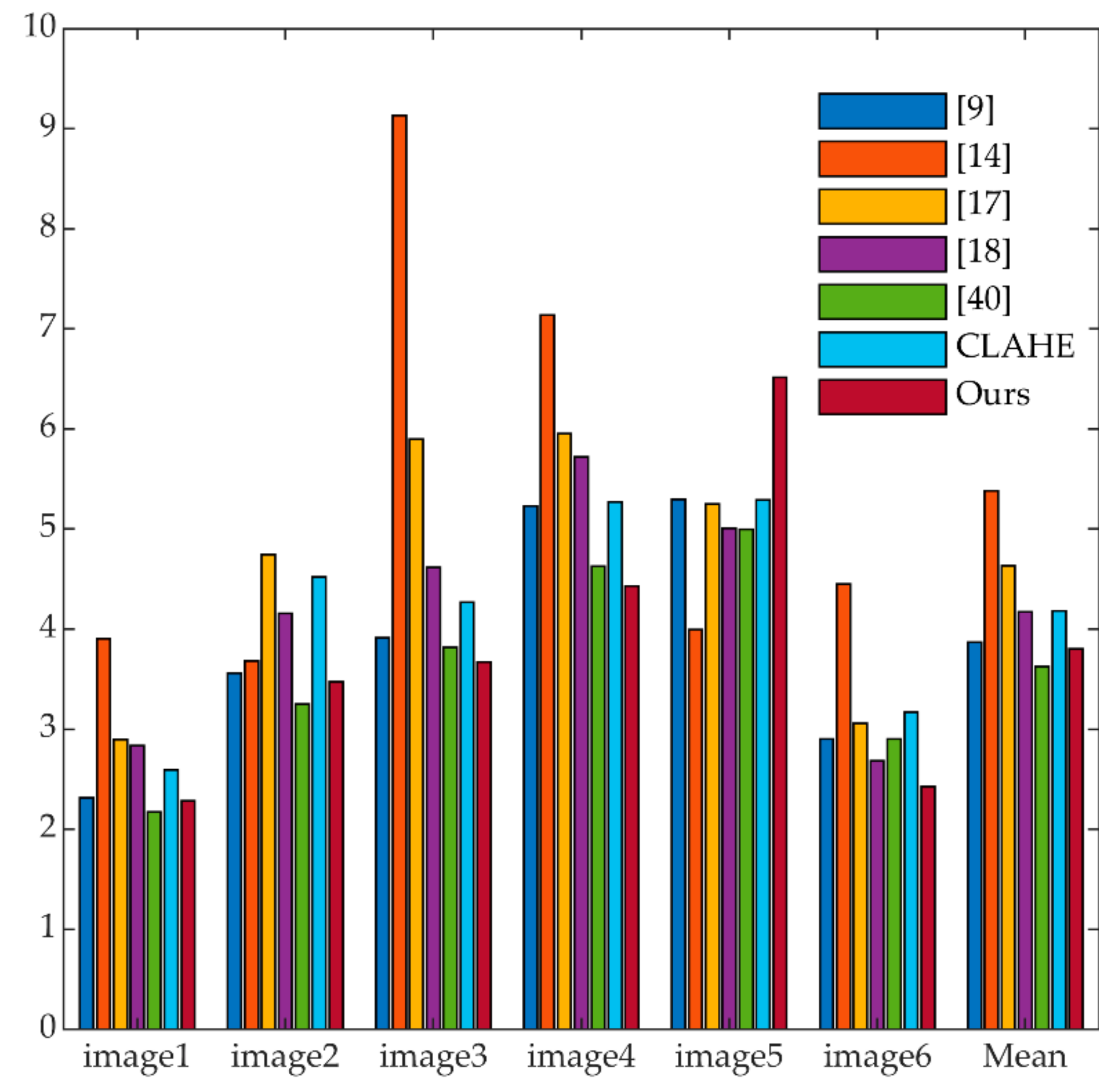
3.3. Quantitative Analysis
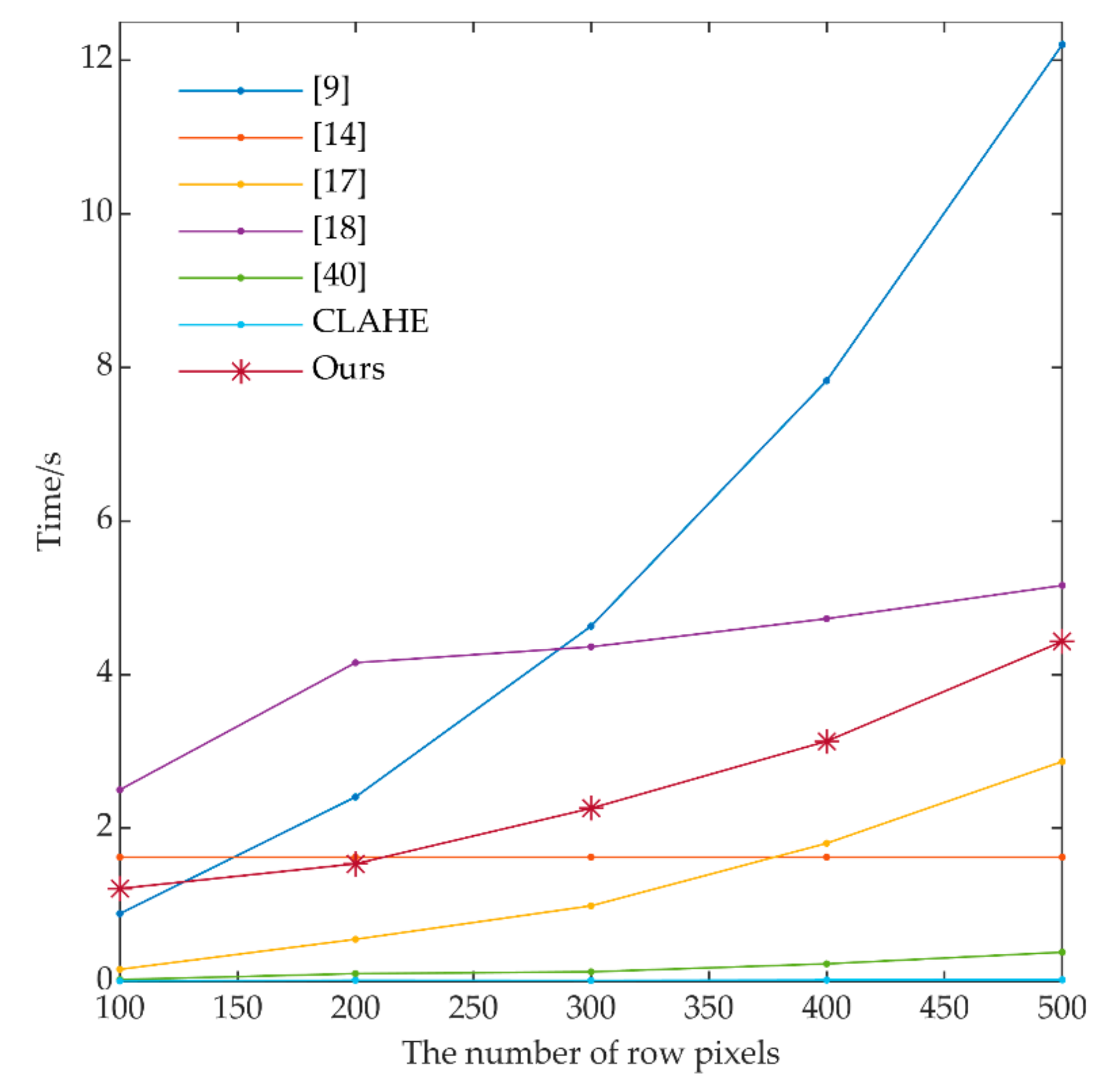
3.4. Runtime Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hu, H.F.; Qi, P.F.; Li, X.B.; Cheng, Z.Z.; Liu, T.G. Underwater imaging enhancement based on a polarization filter and histogram attenuation prior. J. Phys. D. Appl. Phys. 2021, 54, 175102. [Google Scholar] [CrossRef]
- Lu, J.Y.; Li, N.; Zhang, S.Y.; Yu, Z.B.; Zheng, H.Y.; Zheng, B. Multi-scale adversarial network for underwater image restoration. Opt. Laser Technol. 2019, 110, 105–113. [Google Scholar] [CrossRef]
- Chen, T.; Qu, X.R.; Zhang, Z.; Liang, X. Region-Searching of Multiple Autonomous Underwater Vehicles: A Distributed Cooperative Path-Maneuvering Control Approach. J. Mar. Sci. Eng. 2021, 9, 355. [Google Scholar] [CrossRef]
- Narasimhan, S.G.; Nayar, S.K. Contrast restoration of weather degraded images. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 713–724. [Google Scholar] [CrossRef]
- Matthieu, B.; Frederic, G.; Allais, A.G. Influence of polarization filtering on image registration precision in underwater conditions. Opt. Lett. 2012, 37, 3273–3275. [Google Scholar] [CrossRef]
- Amer, K.O.; Elbouz, M.; Alfalou, A.; Brosseau, C.; Hajjami, J. Enhancing underwater optical imaging by using a low-pass polarization filter. Opt. Express 2019, 27, 621–643. [Google Scholar] [CrossRef]
- Hu, K.; Zhang, Y.W.; Lu, F.Y.; Deng, Z.L.; Liu, Y.P. An underwater image enhancement algorithm based on MSR parameter optimization. J. Mar. Sci. Eng. 2020, 8, 741. [Google Scholar] [CrossRef]
- Hou, G.J.; Pan, Z.K.; Huang, B.X.; Wang, G.D.; Xin, L. Hue preserving-based approach for underwater colour image enhancement. IET Image Process. 2018, 12, 292–298. [Google Scholar] [CrossRef]
- Marques, T.P.; Albu, A.B. L2UWE: A Framework for the Efficient Enhancement of Low-Light Underwater Images Using Local Contrast and Multi-Scale Fusion. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 14–19 June 2020. [Google Scholar] [CrossRef]
- Ancuti, C.O.; Ancuti, C.; Vleeschouwer, C.D.; Bekaert, P. Color balance and fusion for underwater image enhancement. IEEE Trans. Image Process. 2018, 27, 379–393. [Google Scholar] [CrossRef]
- Park, J.H.; Han, D.K.; Ko, H. Adaptive Weighted Multi-Discriminator CycleGAN for Underwater Image Enhancement. J. Mar. Sci. Eng. 2019, 7, 200. [Google Scholar] [CrossRef]
- Wang, K.Y.; Hu, Y.; Chen, J.; Wu, X.Y.; Zhao, X.; Li, Y.S. Underwater Image Restoration Based on a Parallel Convolutional Neural Network. Remote Sens. 2019, 11, 1591. [Google Scholar] [CrossRef]
- Liu, P.; Wang, G.Y.; Qi, H.; Zhang, C.F.; Zheng, H.Y.; Yu, Z.B. Underwater Image Enhancement with a Deep Residual Framework. IEEE Access 2019, 7, 94614–94629. [Google Scholar] [CrossRef]
- Li, C.Y.; Anwar, S.; Porikli, F. Underwater scene prior inspired deep underwater image and video enhancement. Pattern Recognit. 2020, 98, 107038. [Google Scholar] [CrossRef]
- Ye, X.C.; Li, Z.; Sun, B.L.; Wang, Z.H.; Xu, R.; Li, H.J.; Xin, F. Deep joint depth estimation and color correction from monocular underwater images based on unsupervised adaptation networks. IEEE Trans. Circuits Syst. Video 2020, 30, 3995–4008. [Google Scholar] [CrossRef]
- Han, J.L.; Shoeiby, M.; Malthus, T.; Botha, E.; Anstee, J.; Anwar, S.; Wei, R.; Petersson, L.; Armin, M.A. Single underwater image restoration by contrastive learning. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Brussels, Belgium, 11–16 July 2021; preprint. Available online: https://arxiv.org/abs/2103.09697 (accessed on 17 May 2021).
- He, K.M.; Sun, J.; Tang, X. Single image haze removal using dark channel prior. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 2341–2353. [Google Scholar] [CrossRef]
- Berman, D.; Treibitz, T.; Avidan, S. Signal image dehazing using haze-lines. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 720–734. [Google Scholar] [CrossRef] [PubMed]
- Peng, Y.T.; Cosman, P.C. Underwater image restoration based on image blurriness and light absorption. IEEE Trans. Image Process. 2017, 26, 1579–1594. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.H.; Peng, J.H. Underwater image restoration based on a new underwater image formation model. IEEE Access 2018, 6, 58634–58644. [Google Scholar] [CrossRef]
- Dai, C.G.; Lin, M.X.; Wu, X.J.; Wang, Z.; Guan, Z.G. Single underwater image restoration by decomposing curves of attenuating color. Opt. Laser Technol. 2020, 123, 105947. [Google Scholar] [CrossRef]
- Azmi, K.Z.M.; Ghani, A.S.A.; Yusof, Z.M.; Ibrahim, Z. Deep underwater image enhancement through color cast removal and optimization algorithm. Imaging Sci. J. 2019, 67, 330–342. [Google Scholar] [CrossRef]
- Zhao, X.W.; Jin, T.; Qu, S. Deriving inherent optical properties from background color and underwater image enhancement. Ocean Eng. 2015, 94, 163–172. [Google Scholar] [CrossRef]
- Galdran, A.; Pardo, D.; Picon, A.; Alvarez, G.A. Automatic Red-Channel underwater image restoration. J. Vis. Commun. Image Represent. 2015, 26, 132–145. [Google Scholar] [CrossRef]
- He, K.M.; Sun, J.; Tang, X.O. Guided Image Filtering. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 35, 1397–1409. [Google Scholar] [CrossRef]
- Zhou, J.C.; Liu, Z.Z.; Zhang, W.D.; Zhang, D.H.; Zhang, W.S. Underwater image restoration based on secondary guided transmission map. Multimed. Tools Appl. 2021, 80, 7771–7788. [Google Scholar] [CrossRef]
- Hou, G.J.; Pan, Z.K.; Wang, G.D.; Yang, H.; Duan, J.M. An efficient nonlocal variational method with application to underwater image restoration. Neurocomputing 2019, 369, 106–121. [Google Scholar] [CrossRef]
- Hou, G.J.; Li, J.M.; Wang, G.D.; Pan, Z.K.; Zhao, X. Underwater image dehazing and denoising via curvature variation regularization. Multimed. Tools Appl. 2020, 79, 20199–20219. [Google Scholar] [CrossRef]
- Tang, L.M.; Zhang, H.L.; He, C.J.; Fang, Z. Non-convex and Non-smooth Variational Decomposition for Image Restoration. Appl. Math. Model. 2019, 69, 355–377. [Google Scholar] [CrossRef]
- Jung, M.Y.; Kang, M. Efficient Nonsmooth Nonconvex Optimization for Image Restoration and Segmentation. J. Sci. Comput. 2015, 62, 336–370. [Google Scholar] [CrossRef]
- Ren, Y.J.; Tang, L.M. A nonconvex and nonsmooth anisotropic total variation model for image noise and blur removal. Multimed. Tools Appl. 2020, 79, 1445–1473. [Google Scholar] [CrossRef]
- Geman, S.; Gaman, D. Stochastic Relaxation, Gibbs Distributions, and the Bayesian Restoration of Images. IEEE Trans. Pattern Anal. Mach. Intell. 1984, 6, 721–741. [Google Scholar] [CrossRef] [PubMed]
- Kang, M.; Kang, M.; Jung, M. Nonconvex higher-order regularization based Rician noise removal with spatially adaptive parameters. J. Vis. Commun. Image Represent. 2015, 32, 180–193. [Google Scholar] [CrossRef]
- Oh, S.; Hoo, H.; Yun, S.; Kang, M. Non-convex hybrid total variation for image denoising. J. Vis. Commun. Image Represent. 2013, 24, 332–344. [Google Scholar] [CrossRef]
- Miao, Y.; Sowmya, A.; Wei, Z.Q.; Zheng, B. Offshore underwater image restoration using reflection-decomposition-based transmission map estimation. IEEE J. Ocean. Eng. 2020, 45, 521–533. [Google Scholar] [CrossRef]
- Pan, J.S.; Sun, D.Q.; Pfister, H.; Yang, M.H. Deblurring Images via Dark Channel Prior. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 2315–2328. [Google Scholar] [CrossRef] [PubMed]
- Kaveh, A.; Dadras, A. A novel meta-heuristic optimization algorithm: Thermal exchange optimization. Adv. Eng. Softw. 2017, 110, 69–84. [Google Scholar] [CrossRef]
- Xing, Z.K.; Jia, H.M. An improved thermal exchange optimization based GLCM for multi-level image segmentation. Multimed. Tools Appl. 2020, 79, 12007–12040. [Google Scholar] [CrossRef]
- Guo, H.; Chen, J.Y.; Yang, X.; Jiao, Q.L.; Liu, M. Visible-Infrared Image Fusion Based on Double- Density Wavelet and Thermal Exchange Optimization. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12 March 2021. [Google Scholar] [CrossRef]
- Ma, J.X.; Fan, X.N.; Yang, S.X.; Zhang, X.W.; Zhu, X.F. Contrast Limited Adaptive Histogram Equalization-Based Fusion in YIQ and HSI Color Spaces for Underwater Image Enhancement. Int. J. Pattern Recognit. 2018, 32, 1854018. [Google Scholar] [CrossRef]
- Mittal, A.; Moorthy, A.K.; Bovik, A.C. No-reference image quality assessment in the spatial domain. IEEE Trans. Image Process. 2012, 12, 4695–4708. [Google Scholar] [CrossRef]
- Panetta, K.; Gao, C.; Agaian, S. Human-Visual-System-Inspired Underwater Image Quality Measures. IEEE J. Ocean. Eng. 2016, 41, 541–551. [Google Scholar] [CrossRef]
- Choi, L.K.; You, J.; Bovik, A.C. Referenceless prediction of perceptual fog density and perceptual image defogging. IEEE Trans. Image Process. 2015, 24, 3888–3901. [Google Scholar] [CrossRef]
- Yang, M.; Sowmya, A. An underwater color image quality evaluation metric. IEEE Trans. Image Process. 2015, 24, 6062–6071. [Google Scholar] [CrossRef] [PubMed]
- Mittal, A.; Soundararajan, R.; Bovik, A.C. Making a “Completely Blind” Image Quality Analyzer. IEEE Signal Process. Lett. 2013, 20, 209–212. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiao, Q.; Liu, M.; Li, P.; Dong, L.; Hui, M.; Kong, L.; Zhao, Y. Underwater Image Restoration via Non-Convex Non-Smooth Variation and Thermal Exchange Optimization. J. Mar. Sci. Eng. 2021, 9, 570. https://doi.org/10.3390/jmse9060570
Jiao Q, Liu M, Li P, Dong L, Hui M, Kong L, Zhao Y. Underwater Image Restoration via Non-Convex Non-Smooth Variation and Thermal Exchange Optimization. Journal of Marine Science and Engineering. 2021; 9(6):570. https://doi.org/10.3390/jmse9060570
Chicago/Turabian StyleJiao, Qingliang, Ming Liu, Pengyu Li, Liquan Dong, Mei Hui, Lingqin Kong, and Yuejin Zhao. 2021. "Underwater Image Restoration via Non-Convex Non-Smooth Variation and Thermal Exchange Optimization" Journal of Marine Science and Engineering 9, no. 6: 570. https://doi.org/10.3390/jmse9060570
APA StyleJiao, Q., Liu, M., Li, P., Dong, L., Hui, M., Kong, L., & Zhao, Y. (2021). Underwater Image Restoration via Non-Convex Non-Smooth Variation and Thermal Exchange Optimization. Journal of Marine Science and Engineering, 9(6), 570. https://doi.org/10.3390/jmse9060570