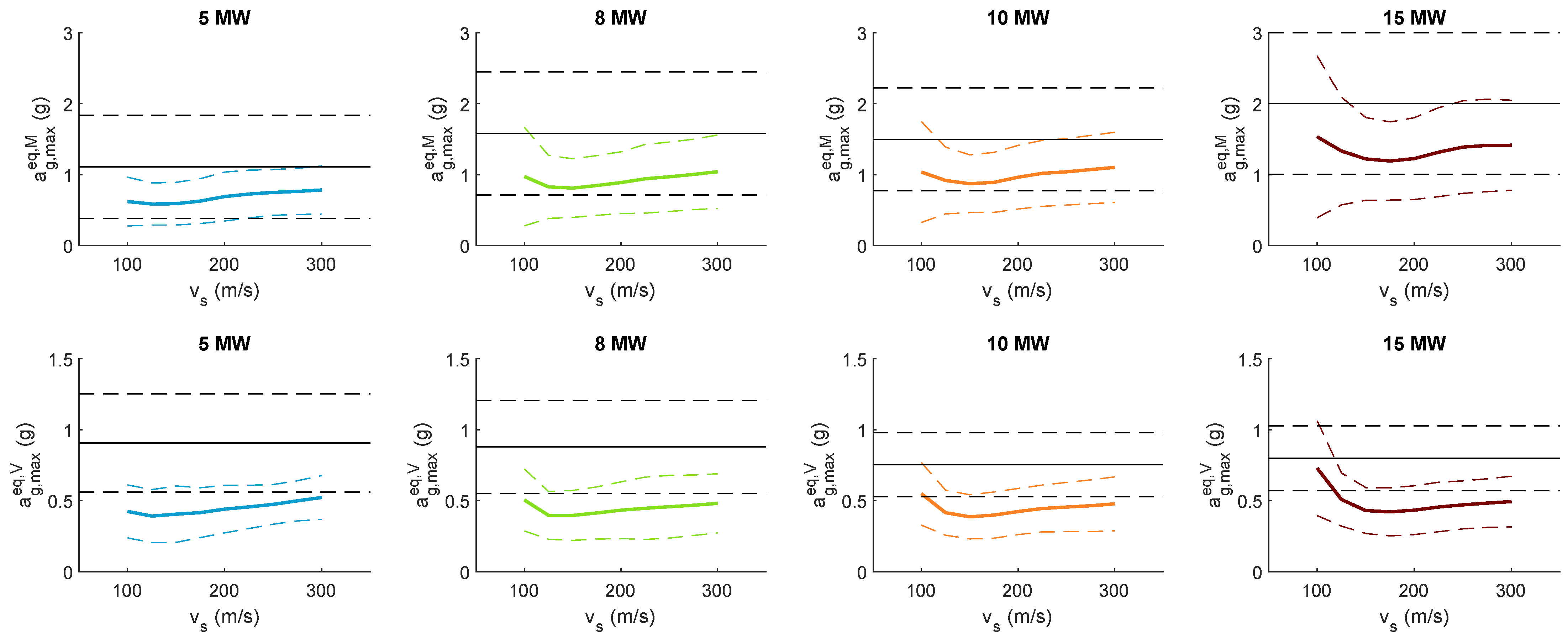
5.1. Variability of the Response Depending on the Seismic Excitation
The high variability of the seismic response observed in the results depicted in
Figure 5 and
Figure 6 can be better understood through the analysis of
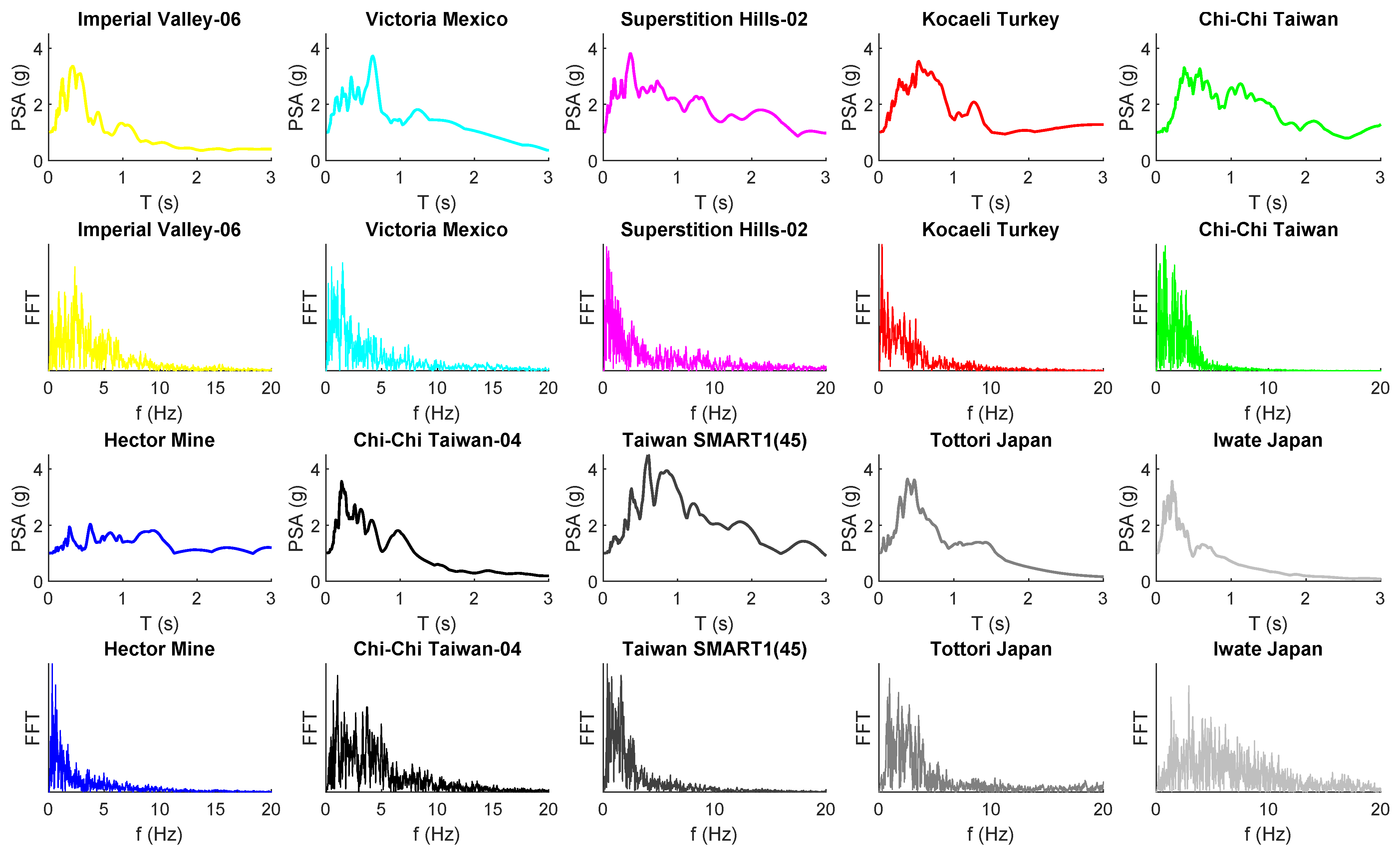
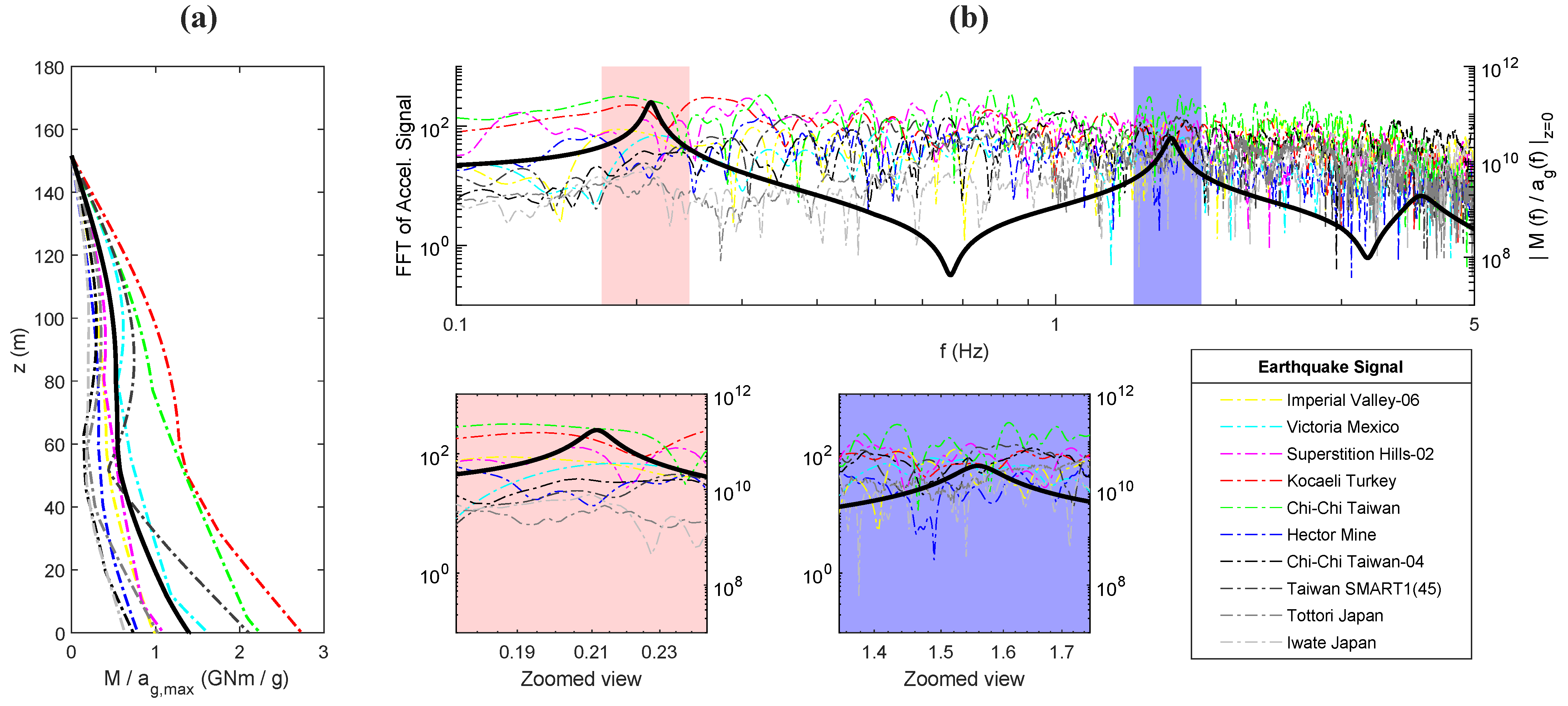
Figure 9 in which a comparison of the seismic response obtained from different accelerograms is illustrated. The presented results correspond to the 10 MW OWT supported on its monopile embedded in a soil with
m/s.
Figure 9a presents the envelopes of maximum seismic bending moment per maximum ground acceleration for each one of the earthquake signals considered in this work (dashed lines) and their mean value (solid black line). Although the evolution of the maximum bending moments along the superstructure follows nearly the same trend, their magnitude significantly differs from one seismic signal to another. This results in the relatively high dispersion obtained in
Figure 5 and
Figure 6.
This variability on the seismic signal can be explained attending to the variable and different frequency content of each excitation signal and the sharp shape of the Frequency Response Function of the structural response variables, which are basically determined by the first two modes. This fact is illustrated in
Figure 9b, in which the Fourier Transform of the seismic signals and the Frequency Response Function of the seismic bending moments at the mudline level (black line) are presented for the frequency range of interest. Please note the logarithm scale used both for the frequency and plotted variables. The frequency content of the different accelerograms in the range of the first two modes are highlighted with different colors and zoomed views are provided below. It is found that, depending on the frequency content on the seismic input, its peaks can coincide with the structural modes amplifying the system response (see, e.g., “Kocaeli Turkey” or “Chi-Chi Taiwan” signals) or not (see, e.g., “Hector Mine” or “Iwate Japan”).
This variability of the the seismic response depending on the excitation signal is a well known effect that seismic codes typically handle through the use of several input signals. In this work, following the DNV Recommended Practice DNV-RP-0585 for the seismic design of wind power plants [
9], the average of the response is used to analyse the OWT superstructure seismic behaviour as more than seven earthquakes have been considered (see Guidance note 4).
5.2. Analysis of the SSI Effects on the Seismic Response
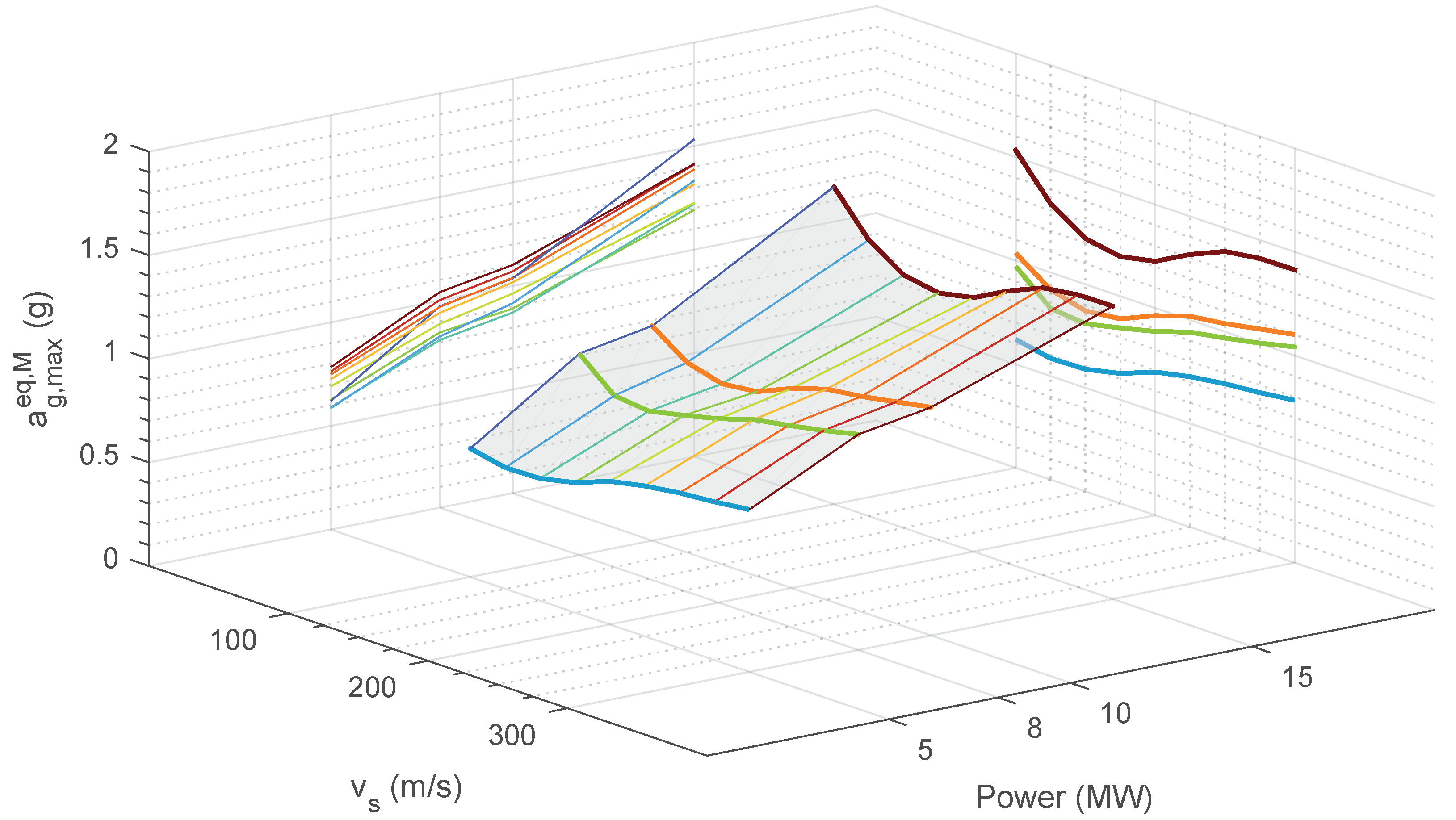
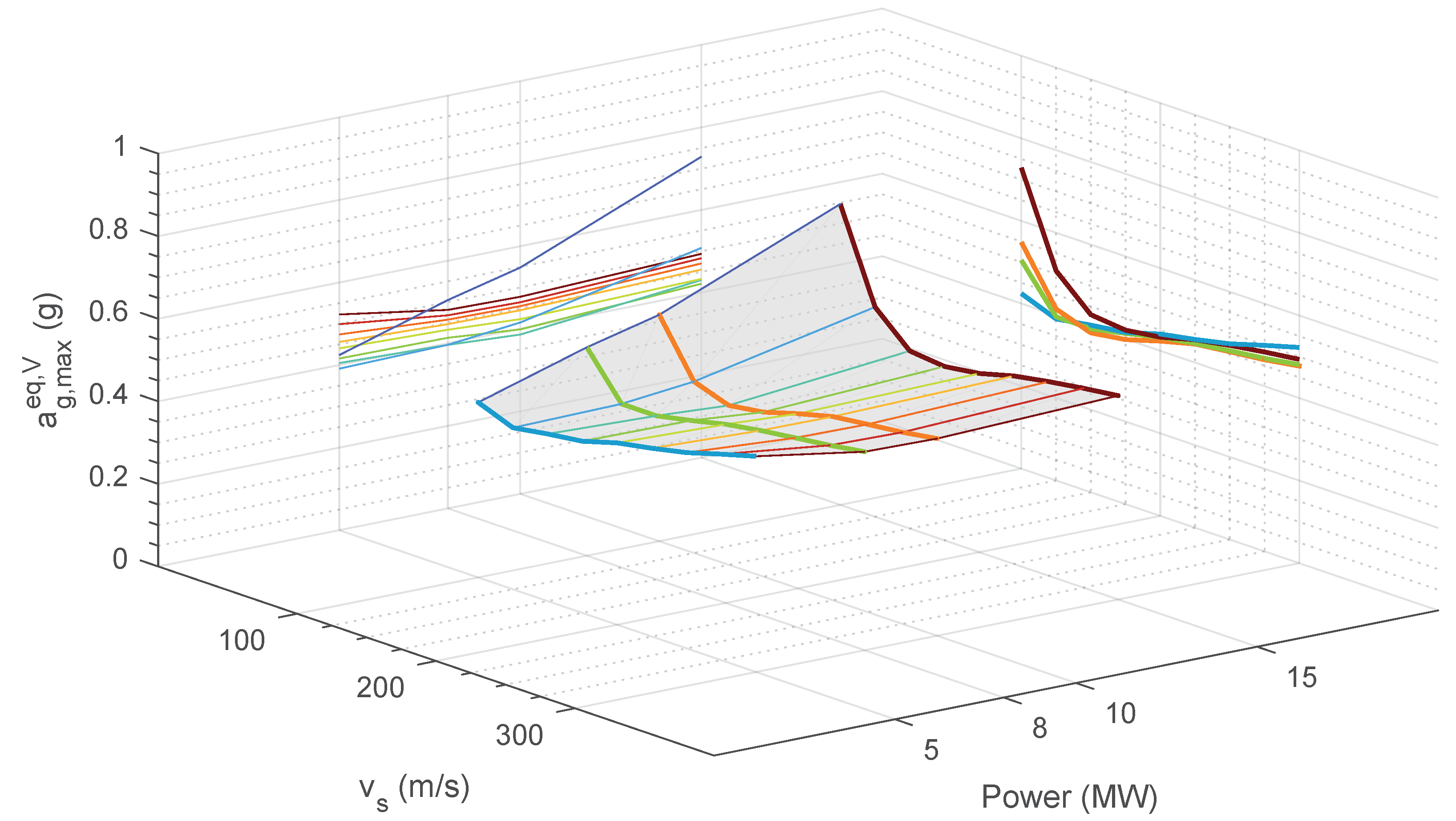
The change of trend observed in the variation of the equivalent ground maximum acceleration for the bending moment at the mudline level with the soil shear wave propagation velocity (
) in
Figure 7 occurs as a consequence of SSI effects associated with the kinematic interaction and the soil stiffness. In order to better explain this behaviour,
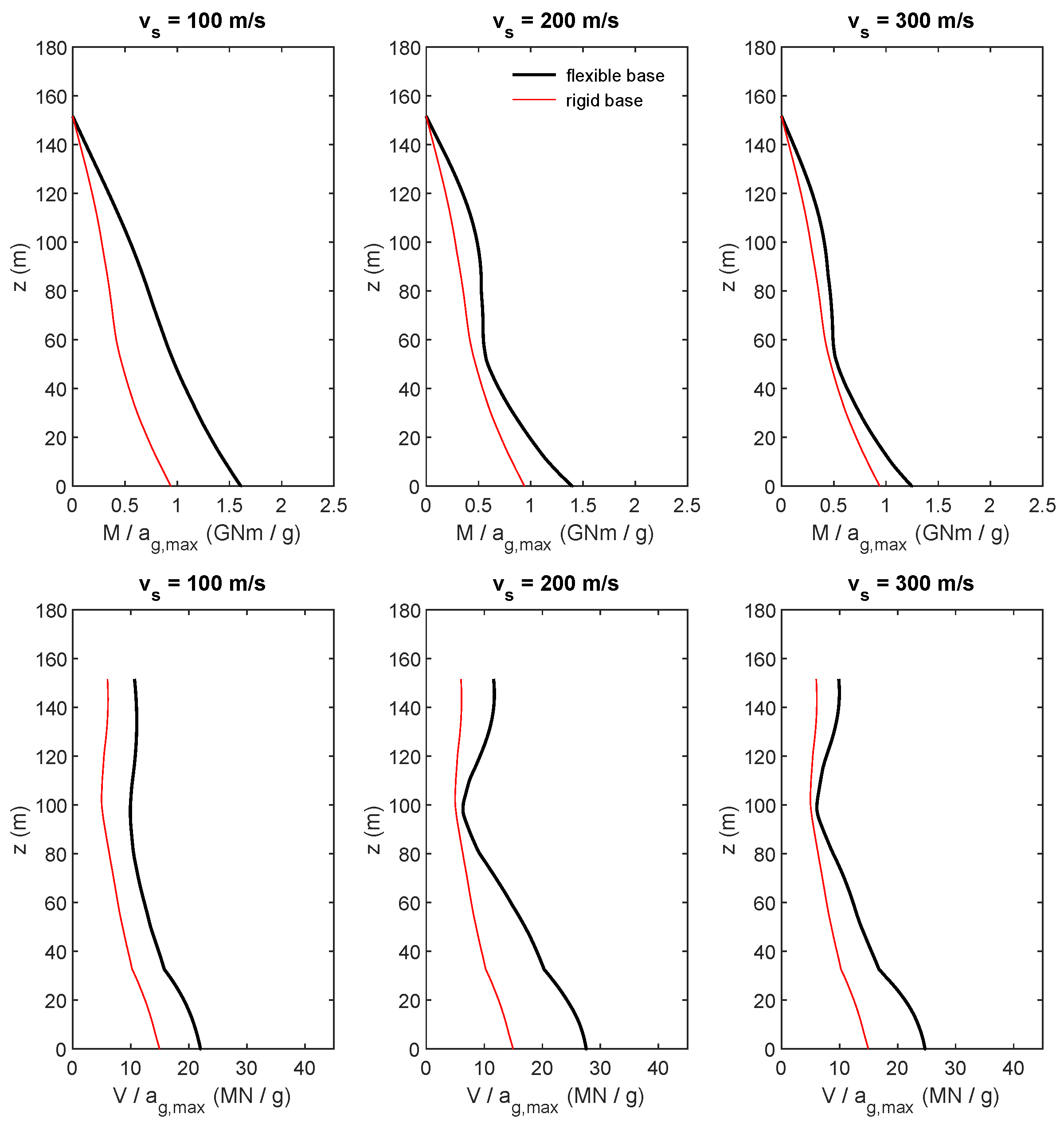
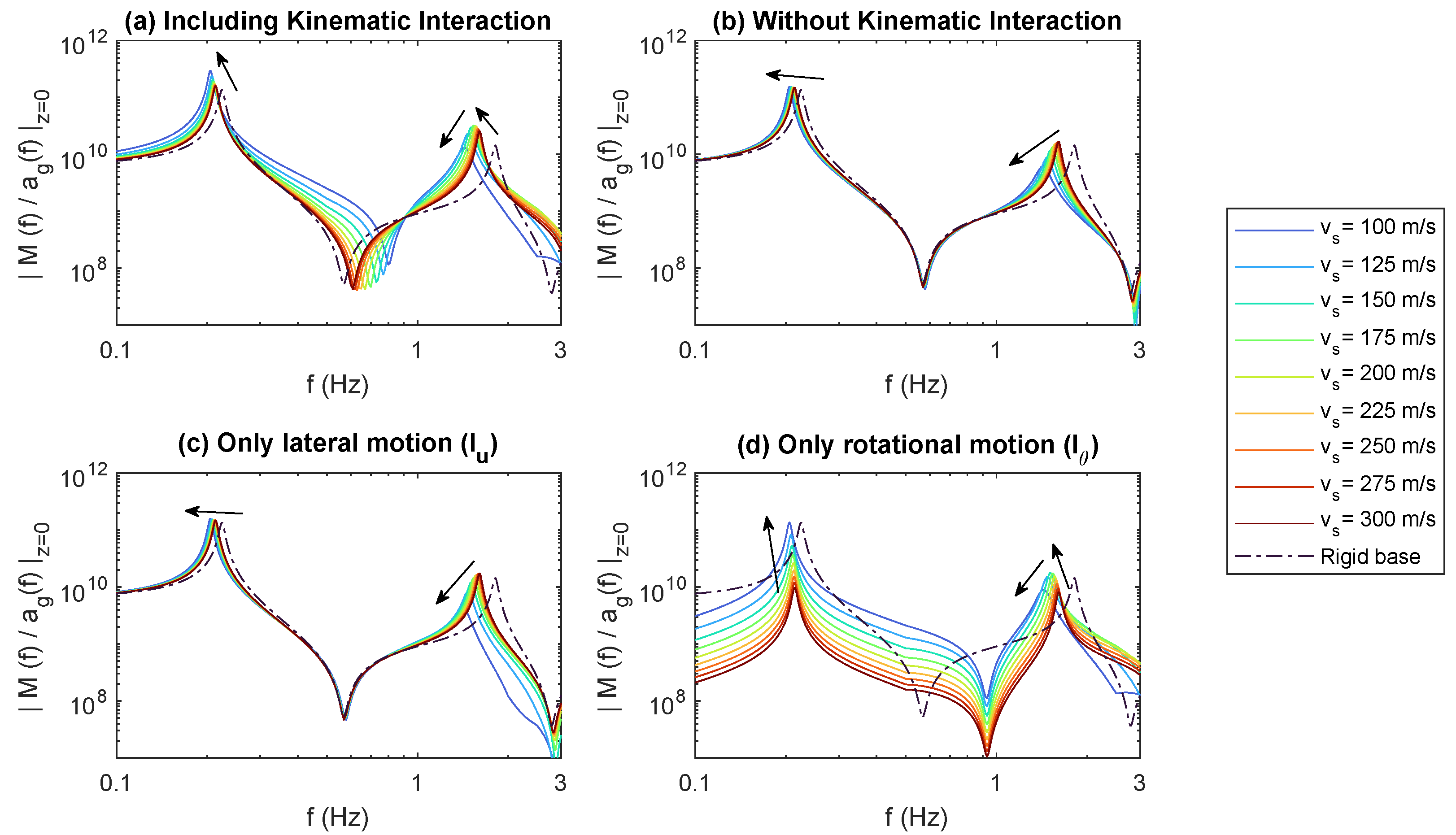
Figure 10 shows different Frequency Response Functions for the bending moment at the mudline level in the frequency range including the first two modes. In order to separate the contribution of the different variables involved in the SSI problem, four scenarios are studied.
Figure 10a presents the results including kinematic interaction, i.e., the results corresponding to the SSI system.
Figure 10c,d presents the contribution of each kinematic interaction term, i.e., lateral
and rotational
kinematic interaction factors, to the total response.
Figure 10b presents the response without including the filtering effect of the kinematic interaction, i.e., assuming
and
. Results corresponding to several values of the shear wave velocity are depicted in different colors. The results obtained under the rigid base condition are also included as a common reference between graphs (black dashed line). The trend of the peak value for each mode when reducing the soil stiffness is indicated by the arrows. For illustration purposes, only the results for the 10 MW OWT system are presented.
Figure 10a shows that the peak value of the first mode increases as softer soils are considered, whereas that of the second mode shows a similar trend only within the high
range, but then decreases with the soil softening for the lower
values. This trend of the second mode coincides with the ones presented by the maximum temporal response, showing an important contribution of the second mode in the system seismic response.
If the kinematic interaction factors are neglected (
Figure 10b), the first mode peak does not change its value with the soil stiffness, while the second mode peak uniformly decreases with the softening soil. This reveals that this trend is only produced by the changes of the soil-foundation impedance with the variation of the soil properties, being the rocking term the one that more influence has on this response. A similar trend is found if only the lateral kinematic interaction factor is considered (
Figure 10c). In this case, a higher reduction of the second mode peak is found due to the filtering effect of the soil lateral motion produced by the pile stiffness.
On the contrary, analysing
Figure 10d where the contribution of the rotational kinematic interaction factor is presented, it can be confirmed that the important increase in the peak value is produced by the increasing value of the pile head rotation obtained for softer soils. For the first mode, this increment is uniform. For the second mode, the rotational kinematic interaction factor and the foundation stiffness induce opposite behaviours, changing the trend of the peak depending on the shear wave velocity value. For soft soils, the influence of the foundation impedance is greater than the one of the rotational motion so the second mode peak decreases with the soil decreasing stiffness. For stiffer soils, on contrary, the influence of the rotational motion overpass the one of the foundation stiffness, so the second mode peak increases with the soil decreasing stiffness.
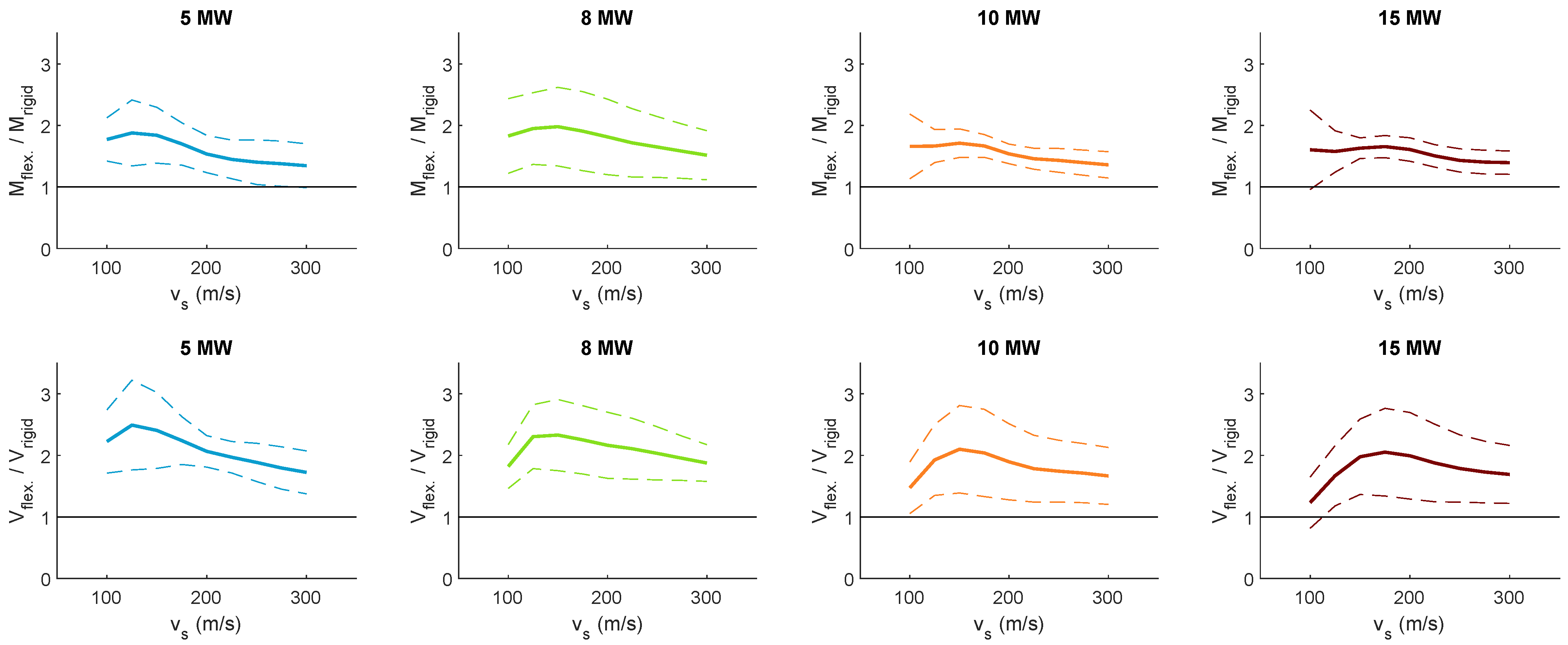
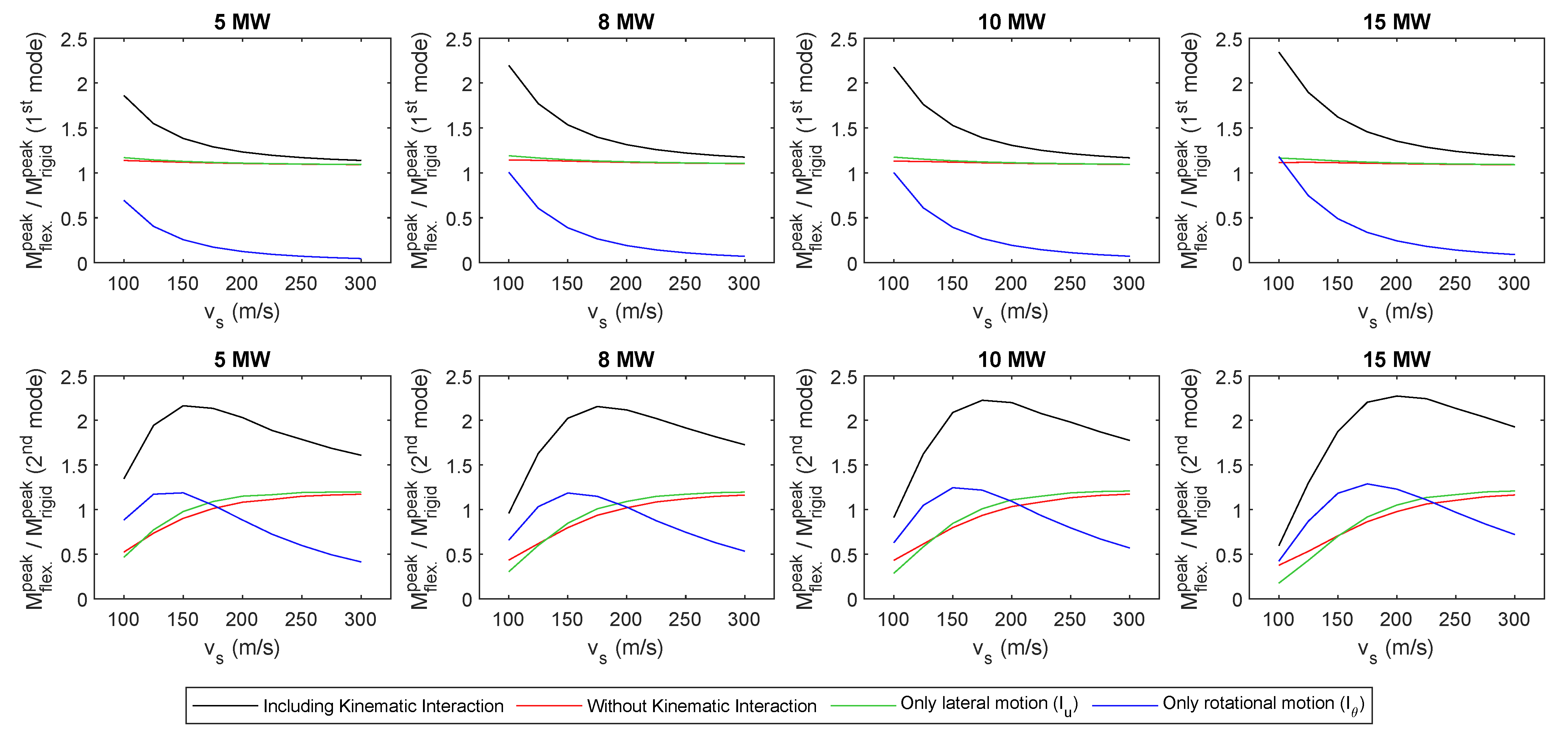
For the purpose of illustrating these effects on the seismic response of the four OWT systems analysed in this work,
Figure 11 provides the peak values of the Frequency Response Functions for the bending moment at the mudline level corresponding to the first two modes. Results computed under flexible base assumption are normalized with those corresponding to rigid base condition in order to have a common scale and are plotted against the soil shear wave propagation velocity. In all cases, the same trend is observed.
For the first mode peak, its changes are governed by the rotational motion, lowering its value as the soil stiffness increases. At these small frequencies, the filtering effect of the lateral kinematic interaction is almost negligible.
For the second mode peak, also the rotational motion presents a high contribution to its dependence with the soil stiffness. The two aforementioned trends are clearly observed: for the softest soils, the peak bending moment is reduced as the soil stiffness decreases, while the opposite effect is found for stiffer soils. This produces a maximum value located around 150 m/s for the studied cases. The contribution of the lateral motion for this mode amplifies the reduction of the peak value for the smallest shear wave velocities. Also, for the softest media, the filtering effect of the foundation start to appear, reducing even more the response with respect to the case without kinematic interaction.
Regarding the influence of the OWT size on these effects, it should be noted that, as the size of the turbine (and, consequently, that of the monopile) grows, a larger influence of the shear wave velocity on the system seismic response is found.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}