
Ionospheric Clutter Suppression with an Auxiliary Crossed-Loop Antenna in a High-Frequency Radar for Sea Surface Remote Sensing


Abstract
:1. Introduction
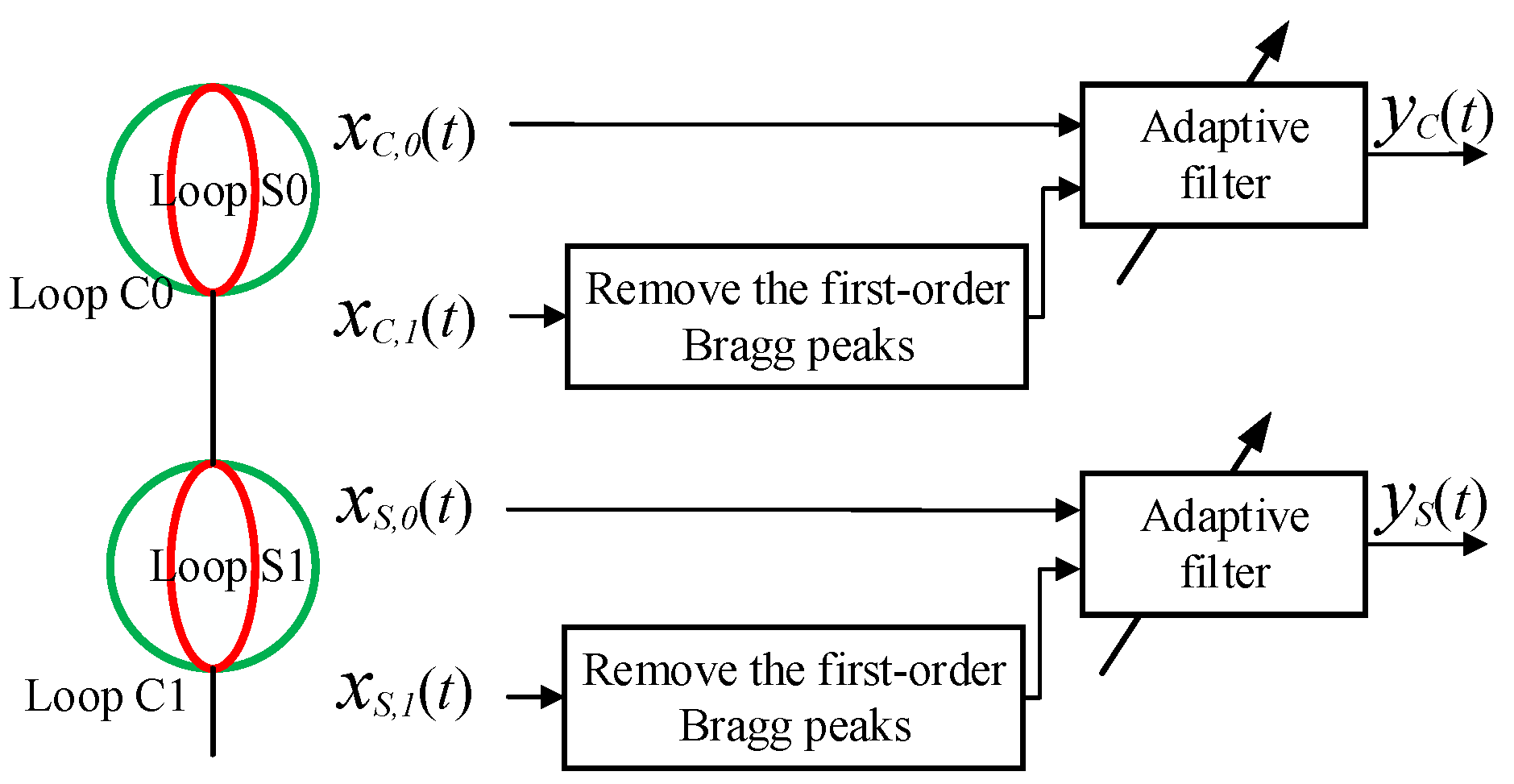
2. Signal Model and Adaptive Filter
3. Experimental Results
3.1. System Parameters
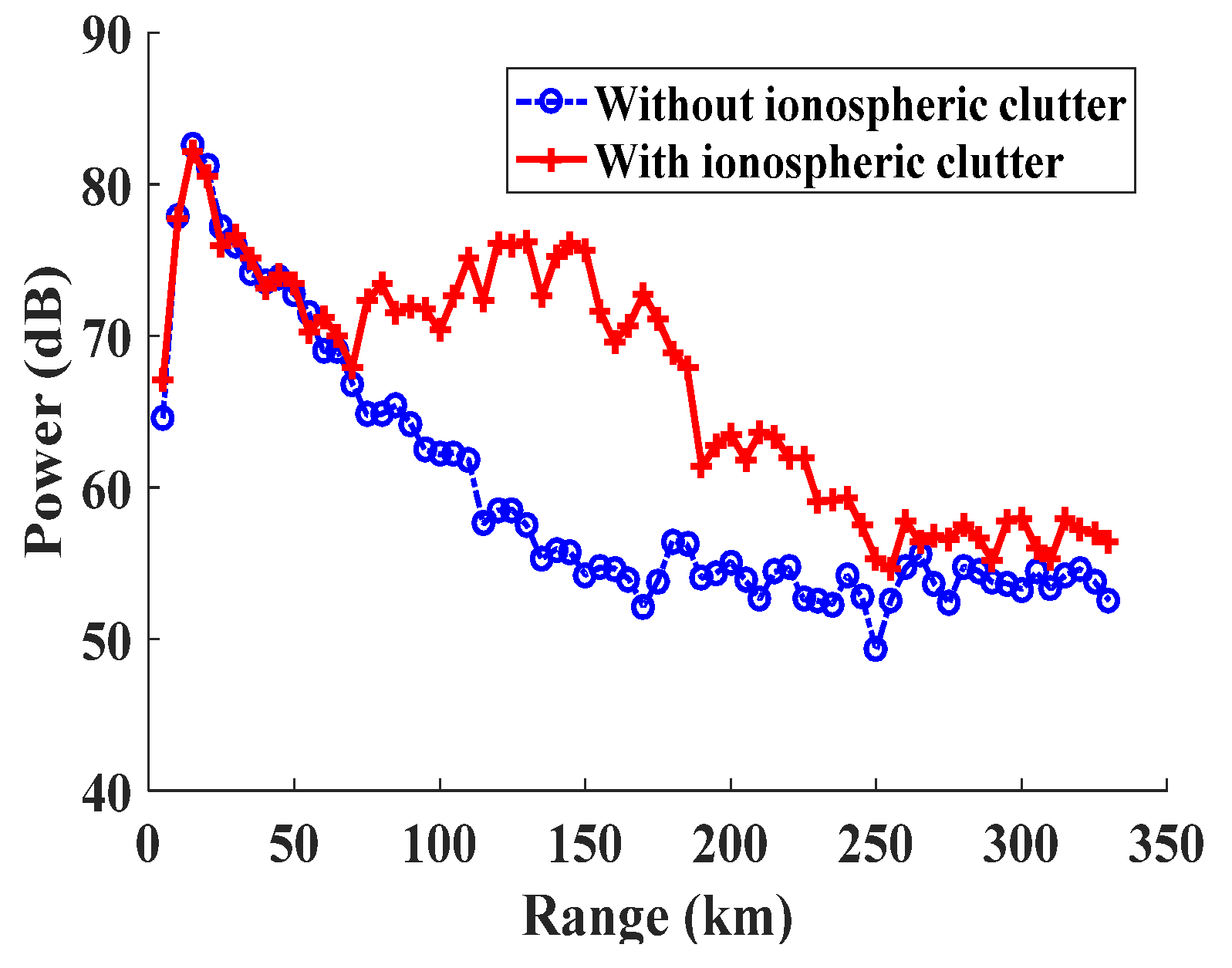
3.2. Detection of Ionospheric Clutter
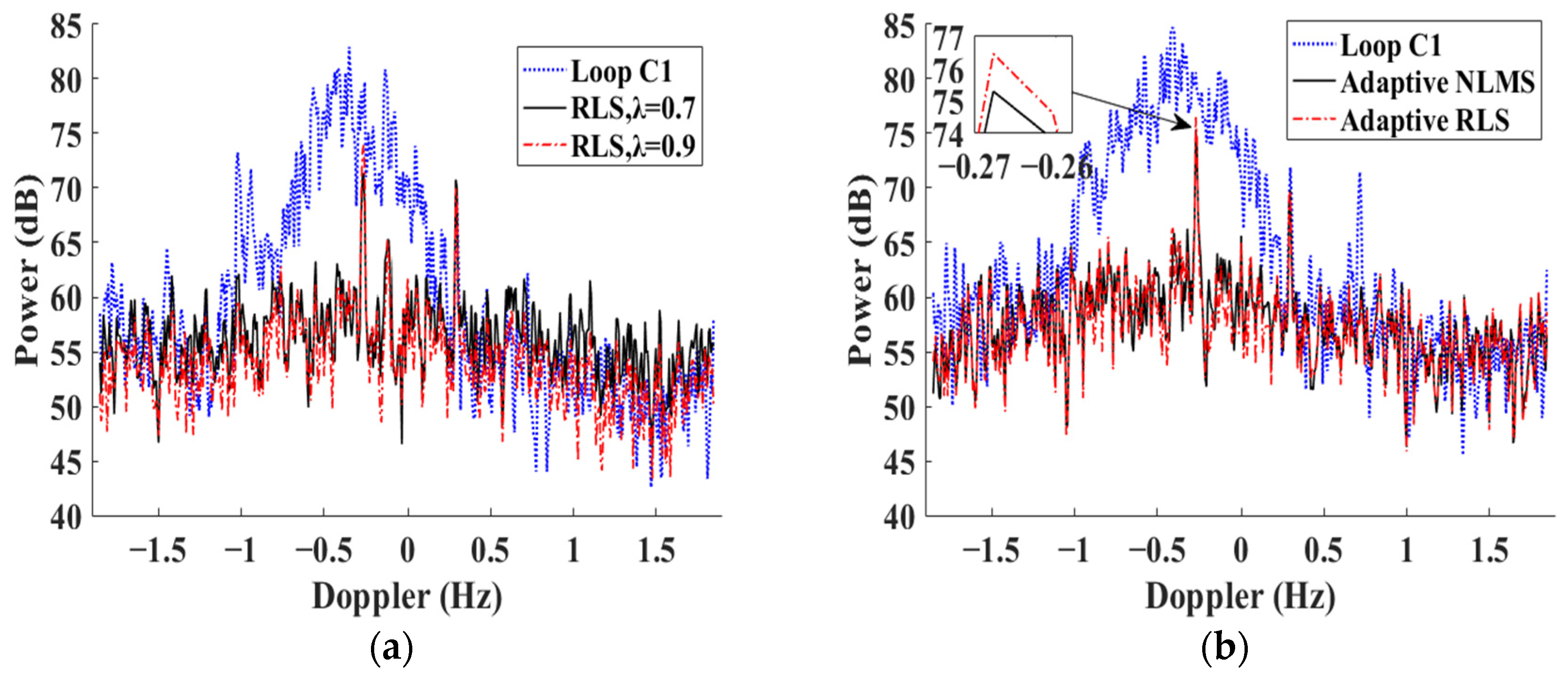
3.3. RLS Adaptive Filter
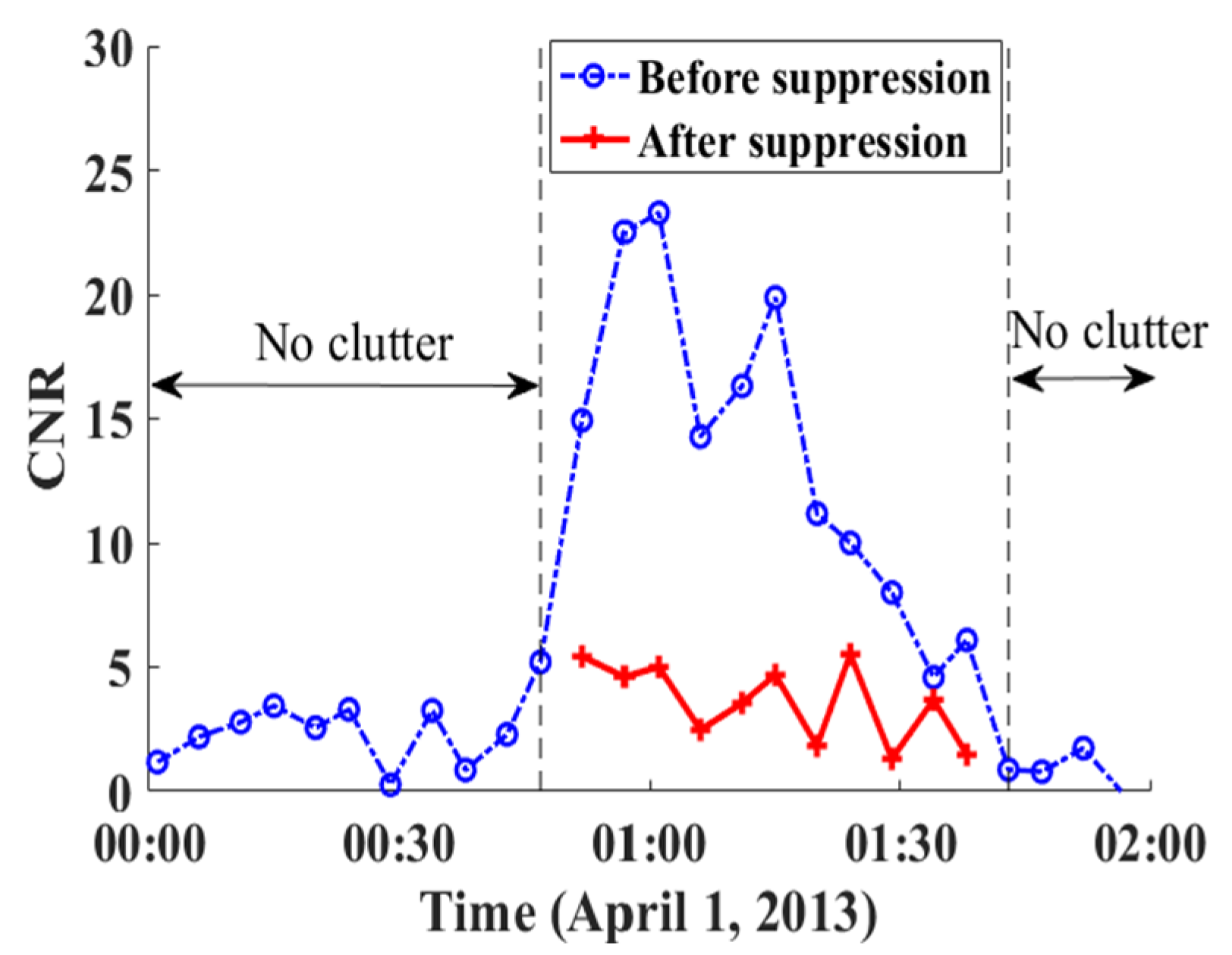
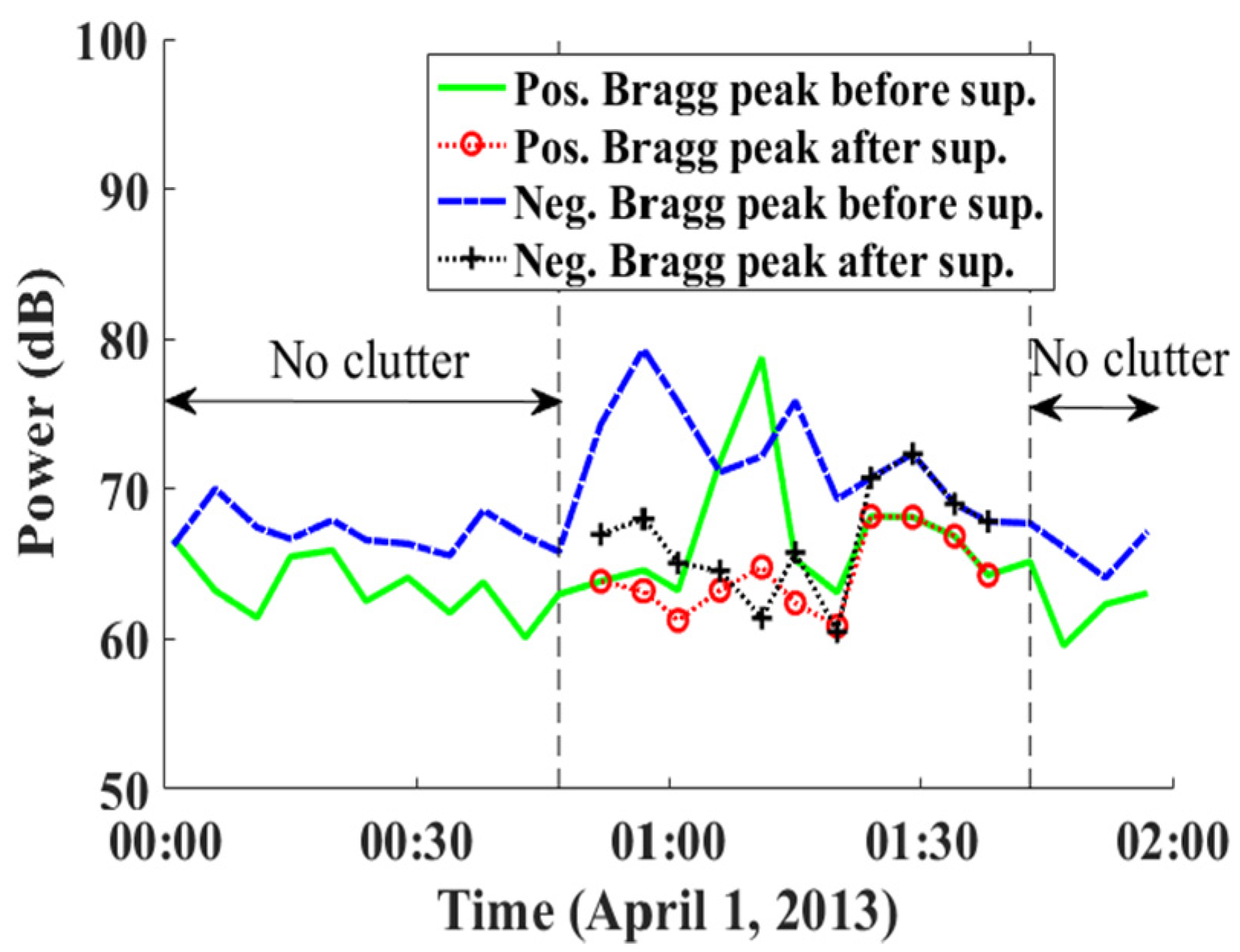
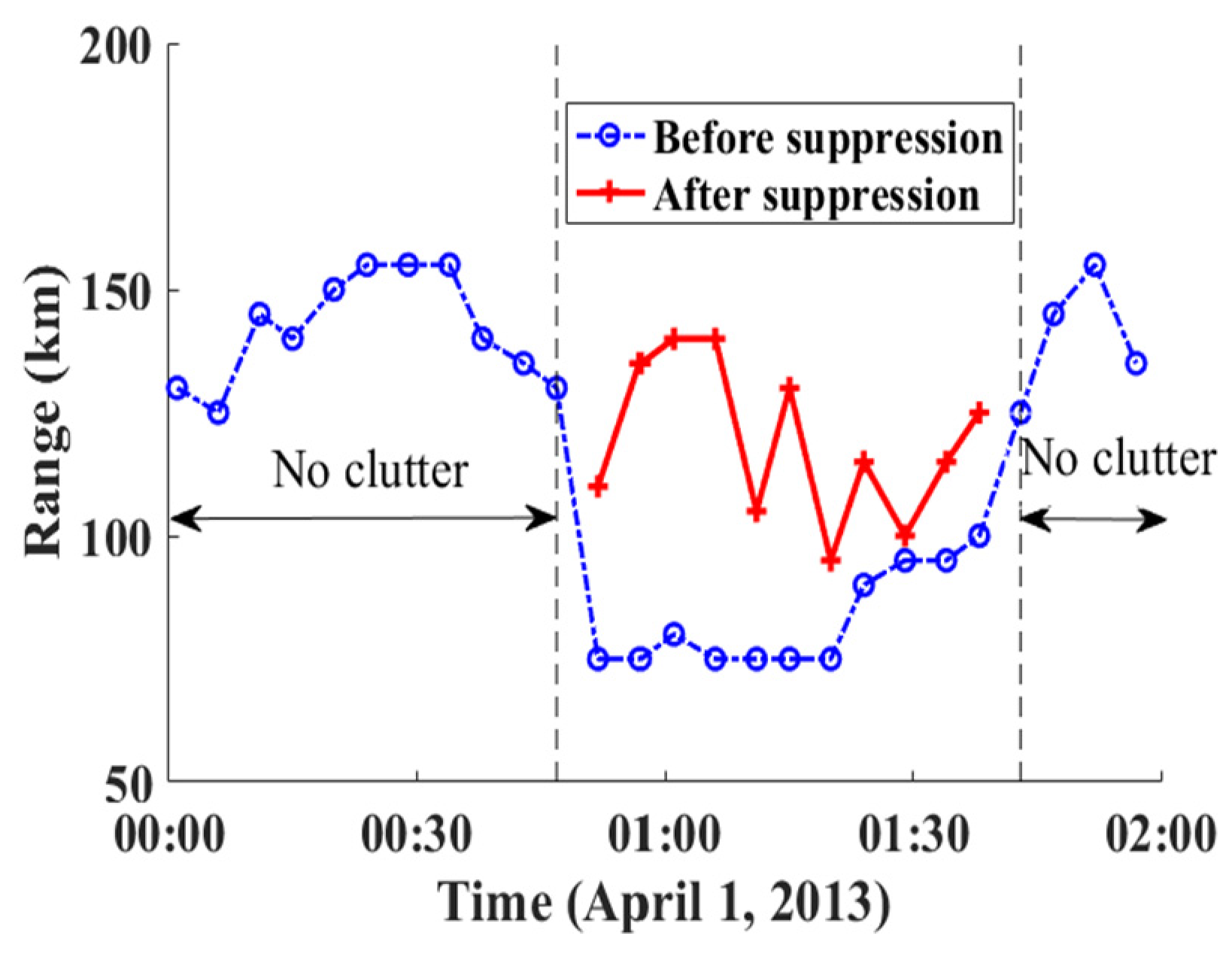
3.4. Suppression Performance
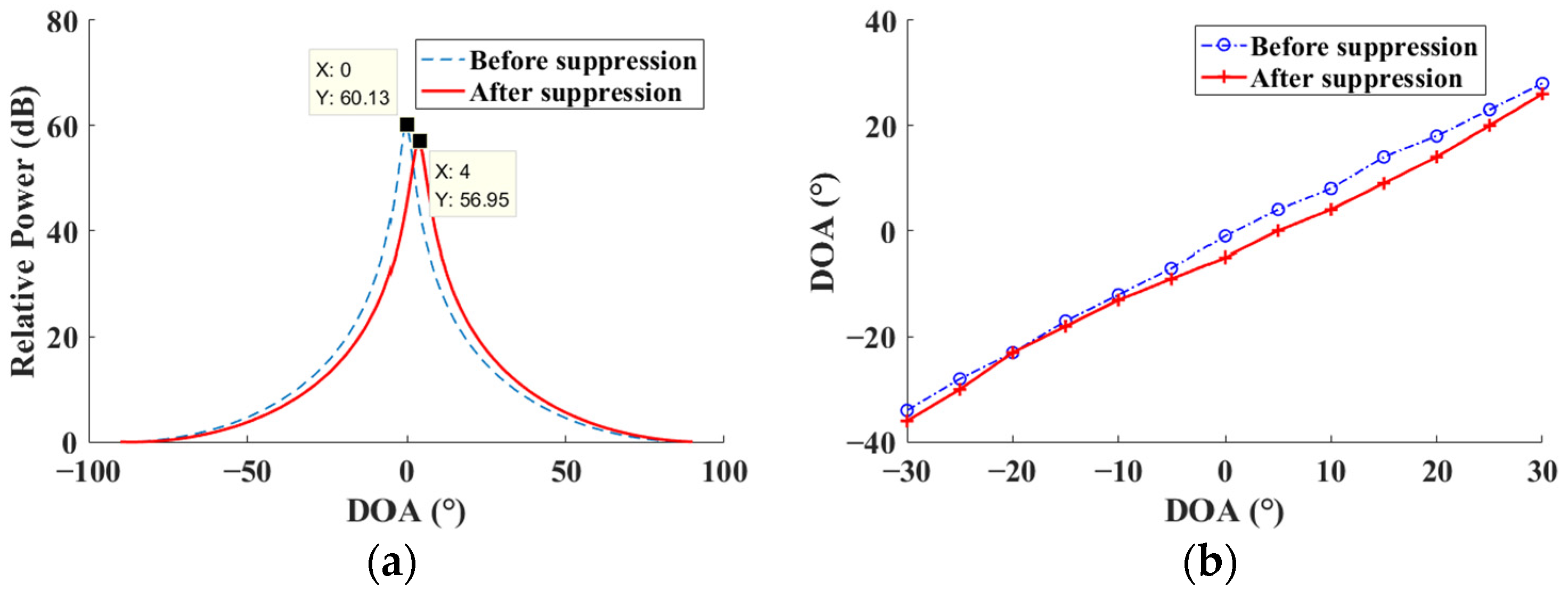
3.5. DOA Estimation
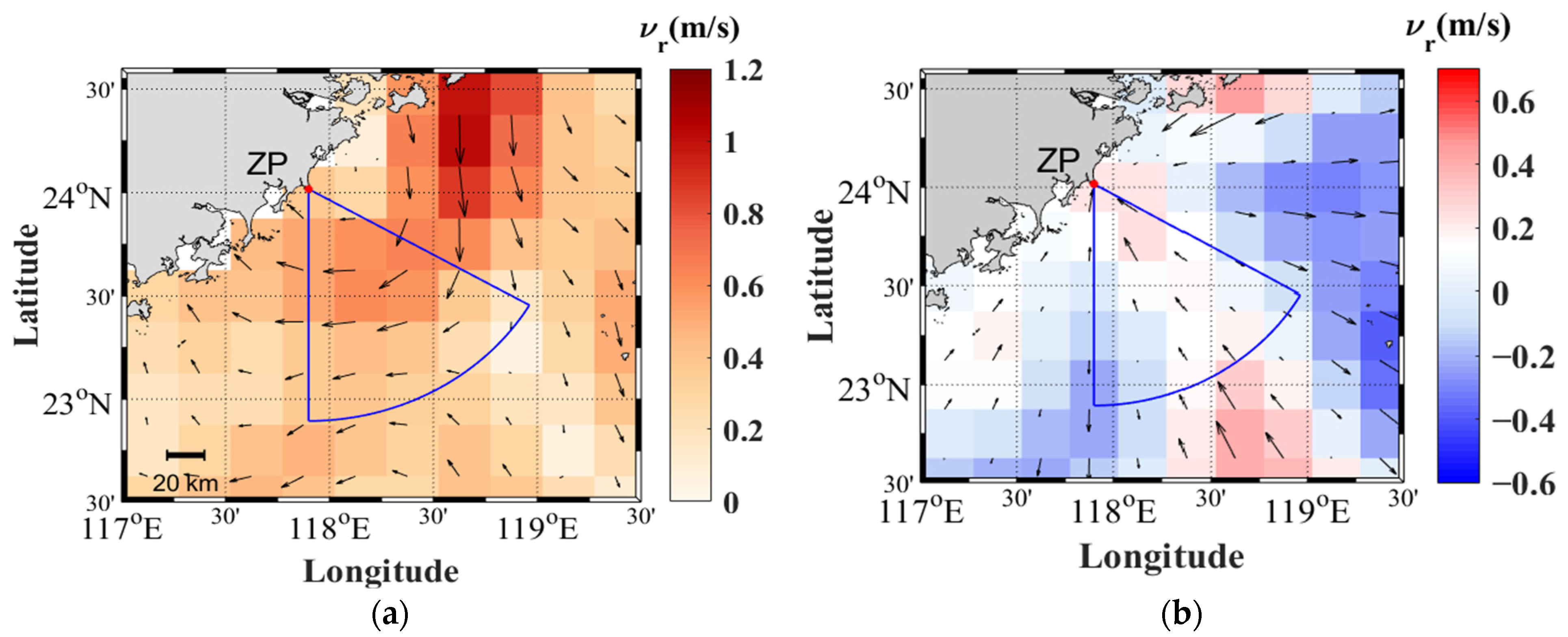
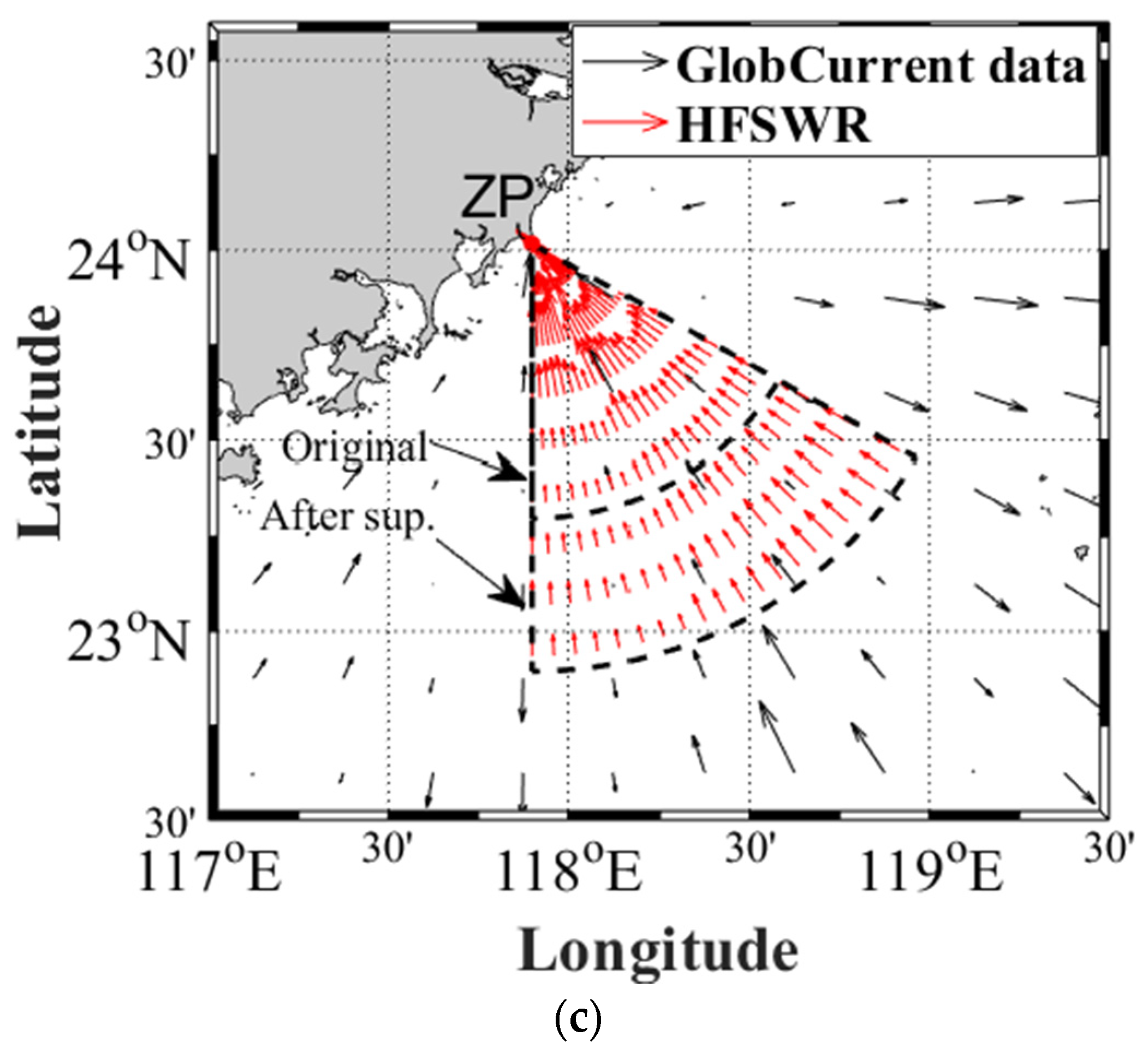
3.6. Recovered Current Map
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Barrick, D.E. Remote sensing of sea state by radar. In Proceedings of the Ocean 72nd IEEE International Conference on Engineering in the Ocean Environment, Newport, RI, USA, 13–15 September 1972; pp. 186–192. [Google Scholar] [CrossRef]
- Park, S.; Cho, C.J.; Ku, B.; Lee, S.; Ko, H. Compact HF Surface Wave Radar Data Generating Simulator for Ship Detection and Tracking. IEEE Geosci. Remote Sens. Lett. 2017, 14, 969–973. [Google Scholar] [CrossRef]
- Lipa, B.; Nyden, B. Directional wave information from the SeaSonde. IEEE J. Ocean. Eng. 2005, 30, 221–231. [Google Scholar] [CrossRef] [Green Version]
- Wyatt, L.R.; Mantovanelli, A.; Heron, M.L.; Roughan, M.; Steinberg, C.R. Assessment of Surface Currents Measured With High-Frequency Phased-Array Radars in Two Regions of Complex Circulation. IEEE J. Ocean. Eng. 2018, 43, 484–505. [Google Scholar] [CrossRef] [Green Version]
- Lai, Y.; Zhou, H.; Zeng, Y.; Wen, B. Accuracy Assessment of Surface Current Velocities Observed by OSMAR-S High-Frequency Radar System. IEEE J. Ocean. Eng. 2018, 43, 1068–1074. [Google Scholar] [CrossRef]
- Yang, X.; Wang, M.; Huang, W.; Yu, C. Experimental Observation and Analysis of Ionosphere Echoes in the Mid-Latitude Region of China Using High-Frequency Surface Wave Radar and Ionosonde. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2020, 13, 4599–4606. [Google Scholar] [CrossRef]
- Anthony, P.; Rick, M.K.; Zhen, D.; Peter, M.; Derek, Y. Towards a Cognitive Radar: Canada’s Third-Generation High Frequency Surface Wave Radar (HFSWR) for Surveillance of the 200 Nautical Mile Exclusive Economic Zone. Sensors 2017, 17, 1588–1601. [Google Scholar]
- Zhang, X.; Yao, D.; Yang, Q.; Dong, Y.; Deng, W. Knowledge-Based Generalized Side-Lobe Canceller for Ionospheric Clutter Suppression in HFSWR. Remote Sens. 2018, 10, 104. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.; Wei, Y.; Xu, R. A Clutter Sample Selection-Based Generalized Sidelobe Canceller Algorithm for Ionosphere Clutter Suppression in HFSWR. In Proceedings of the 2018 International International Conference on RADAR, Harbin, China, 1 August 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Li, Z.; Wen, B.; Tian, Y. Design and Implementation of a Dual-Frequency Compact Antenna System for HF Radar. IEEE Antennas Wireless Propag. Lett. 2017, 16, 1887–1890. [Google Scholar] [CrossRef]
- Chen, Z.; Li, H.; Cui, G.; Rangaswamy, M. Adaptive Transmit and Receive Beamforming for Interference Mitigation. IEEE Signal Process. Lett. 2014, 21, 235–239. [Google Scholar] [CrossRef]
- Guo, Y.; Wei, Y.; Xu, R.; Lei, Y. Fast-time STAP based on BSS for heterogeneous ionospheric clutter mitigation in HFSWR. IET Radar Sonar Navigat. 2020, 14, 927–934. [Google Scholar] [CrossRef]
- Mao, X.; Hong, H.; Deng, W.; Liu, Y. Research on polarization cancellation of nonstationary ionosphere clutter in HF radar system. Int. J. Antennas Propag. 2015, 2015, 631217. [Google Scholar]
- Su, Y.; Wei, Y.; Xu, R.; Liu, Y. Ionospheric clutter suppression using wavelet oblique projecting filter. In Proceedings of the 2017 IEEE Radar Conference, Seattle, WA, USA, 8–12 May 2017; pp. 1552–1556. [Google Scholar] [CrossRef]
- Jangal, F.; Saillant, S.; Hélier, M. Ionospheric clutter mitigation using one-dimensional or two-dimensional wavelet processing. IET Radar Sonar Navigat. 2009, 3, 112–121. [Google Scholar] [CrossRef]
- Zhou, H.; Wen, B.; Wu, S. Ionospheric Clutter Suppression in HFSWR Using Multilayer Crossed-Loop Antennas. IEEE Geosci. Remote Sens. Lett. 2014, 11, 429–433. [Google Scholar] [CrossRef]
- Lai, Y.; Zhou, H.; Wen, B. Surface Current Characteristics in the Taiwan Strait Observed by High-Frequency Radars. IEEE J. Ocean Eng. 2017, 42, 449–457. [Google Scholar] [CrossRef]
- Shao, W.; Yin, T.; Meng, F.; Qian, Z. A novel unitary beamspace recursive least squares algorithm for fast adaptive beamforming. In Proceedings of the 2013 6th International Congress on Image and Signal Processing, Hangzhou, China, 16–18 December 2013; pp. 1236–1240. [Google Scholar] [CrossRef]
- Eleftheriou, E.; Falconer, D.D. Tracking Properties and Steady-State Performance of RLS Adaptive Filter Algorithms. IEEE Trans. Acoust. Speech Signal Process. 1986, 34, 1097–1110. [Google Scholar] [CrossRef]
- Cancet, M.; Griffin, D.; Cahill, M.; Chapron, B.; Johannessen, J.; Donlon, C. Evaluation of GlobCurrent surface ocean current products: A case study in Australia. Remote Sens. Environ. 2019, 220, 71–93. [Google Scholar] [CrossRef] [Green Version]
- Danielson, R.E.; Johannessen, J.A.; Quartly, G.D.; Rio, M.H.; Chapron, B.; Collard, F.; Donlon, C. Exploitation of error correlation in a large analysis validation: GlobCurrent case study. Remote Sens. Environ. 2018, 217, 476–490. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Tian, Y.; Yang, J.; Zhou, H.; Huang, W. Validation and Intercomparison of Sea State Parameter Estimation With Multisensors for OSMAR-S High-Frequency Radar. IEEE Trans. Instrum. Meas. 2020, 69, 7552–7565. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Waveform | Frequency-modulated interrupted continuous wave (FMICW) |
| Working frequency | 7.75 MHz |
| Bandwidth | 30 kHz |
| Sweep period | 0.27 s |
| Range resolution | 5 km |
| Coherent integration time | 4.6 min (1024 sweeps) |
| Main antenna | Crossed-loop/monopole |
| Auxiliary antenna | Crossed-loop |
| Layer spacing | 2.94 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, S.; Zhou, H.; Tian, Y.; Shen, W. Ionospheric Clutter Suppression with an Auxiliary Crossed-Loop Antenna in a High-Frequency Radar for Sea Surface Remote Sensing. J. Mar. Sci. Eng. 2021, 9, 1165. https://doi.org/10.3390/jmse9111165
He S, Zhou H, Tian Y, Shen W. Ionospheric Clutter Suppression with an Auxiliary Crossed-Loop Antenna in a High-Frequency Radar for Sea Surface Remote Sensing. Journal of Marine Science and Engineering. 2021; 9(11):1165. https://doi.org/10.3390/jmse9111165
Chicago/Turabian StyleHe, Shuqin, Hao Zhou, Yingwei Tian, and Wei Shen. 2021. "Ionospheric Clutter Suppression with an Auxiliary Crossed-Loop Antenna in a High-Frequency Radar for Sea Surface Remote Sensing" Journal of Marine Science and Engineering 9, no. 11: 1165. https://doi.org/10.3390/jmse9111165
APA StyleHe, S., Zhou, H., Tian, Y., & Shen, W. (2021). Ionospheric Clutter Suppression with an Auxiliary Crossed-Loop Antenna in a High-Frequency Radar for Sea Surface Remote Sensing. Journal of Marine Science and Engineering, 9(11), 1165. https://doi.org/10.3390/jmse9111165