Adaptable Monitoring Package Development and Deployment: Lessons Learned for Integrated Instrumentation at Marine Energy Sites

 ,
, 
 ,
,
Abstract
1. Introduction
- Passive acoustics: broadband hydrophones, fish tag receivers1;
- Active acoustics: multibeam sonars, echosounders, acoustic Doppler current profilers; and
- Optical cameras: high definition machine vision, including artificial illumination.
- Because data rates for some sensors are relatively high (i.e., >1 Gbps), automatic processing and filtering of collected data are necessary to avoid accruing an unmanageable volume of data (i.e., discarding data that are not of specific interest between acquisition and archival)2;
- Deployment, maintenance, and recovery operations for instrumentation must be compatible with marine energy site characteristics (weather and current windows, depth); and
- Systems must be able to operate effectively in waves and currents conducive to marine energy generation.
- What are the functional ranges and detection capabilities for sensors when deployed in the energetic environments at marine energy sites?
- What is the risk of individual sensors interfering with each other when combined in a single package?
- What are the benefits of including multiple types of sensors on the same package?
- Can automatic target detection and classification reduce the volume of data produced by continuous observation?
- is integrated instrumentation reliable enough to be incorporated into monitoring plans for permitting/consenting of marine energy projects?
- How much mitigation effort should be expended to prevent corrosion and biofouling?
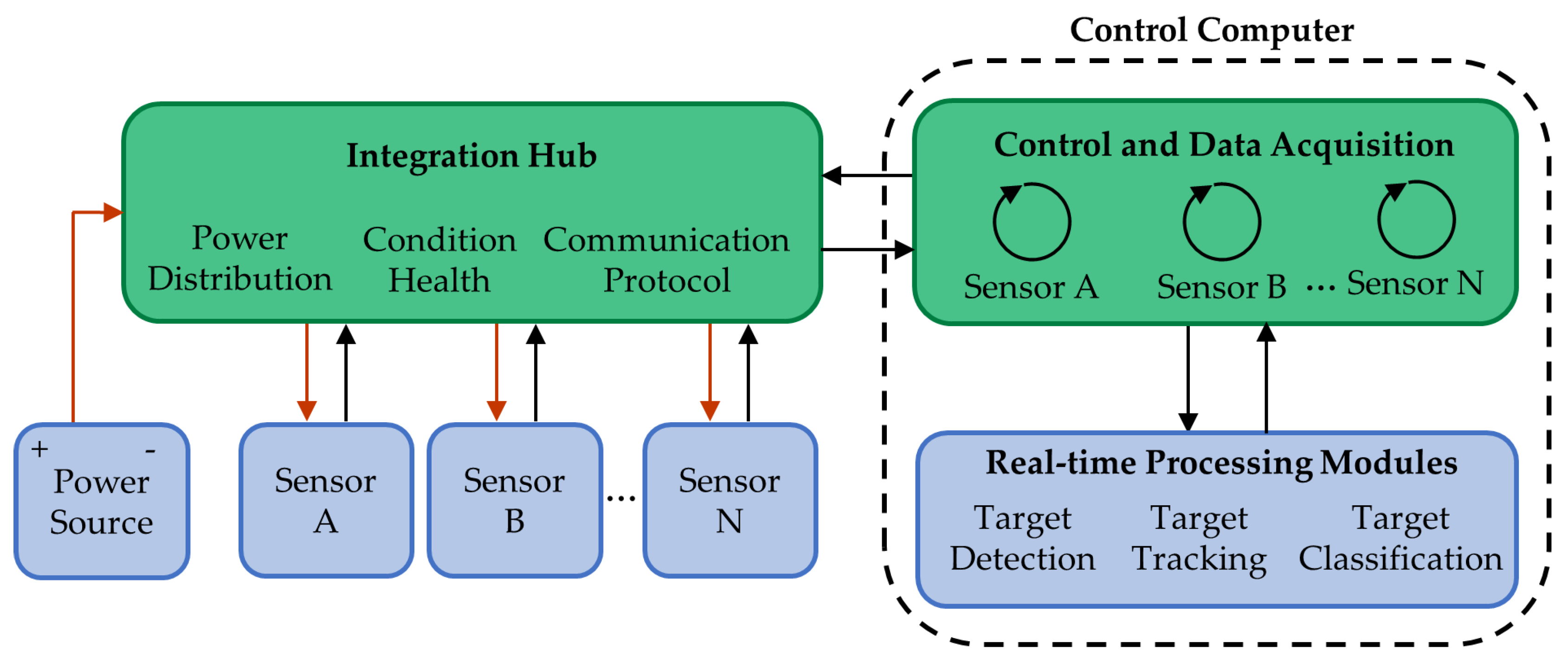
2. System Architecture
2.1. Integration Hub
2.2. Mechanical Components
2.3. Sensor Hardware
2.4. Sensor Software
2.5. Biofouling Mitigation Measures
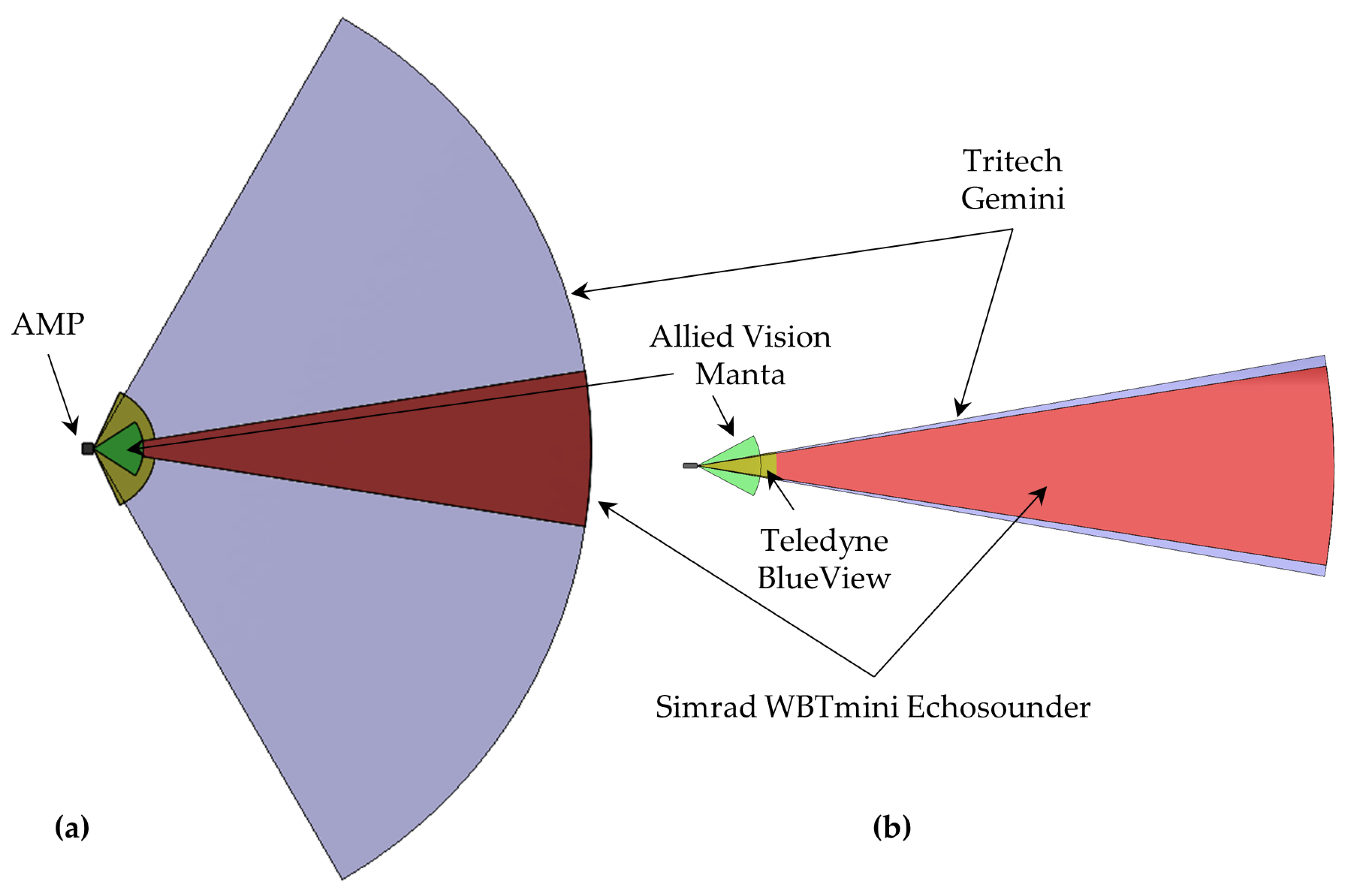
2.6. Adjustable Field of View
3. Representative Deployments
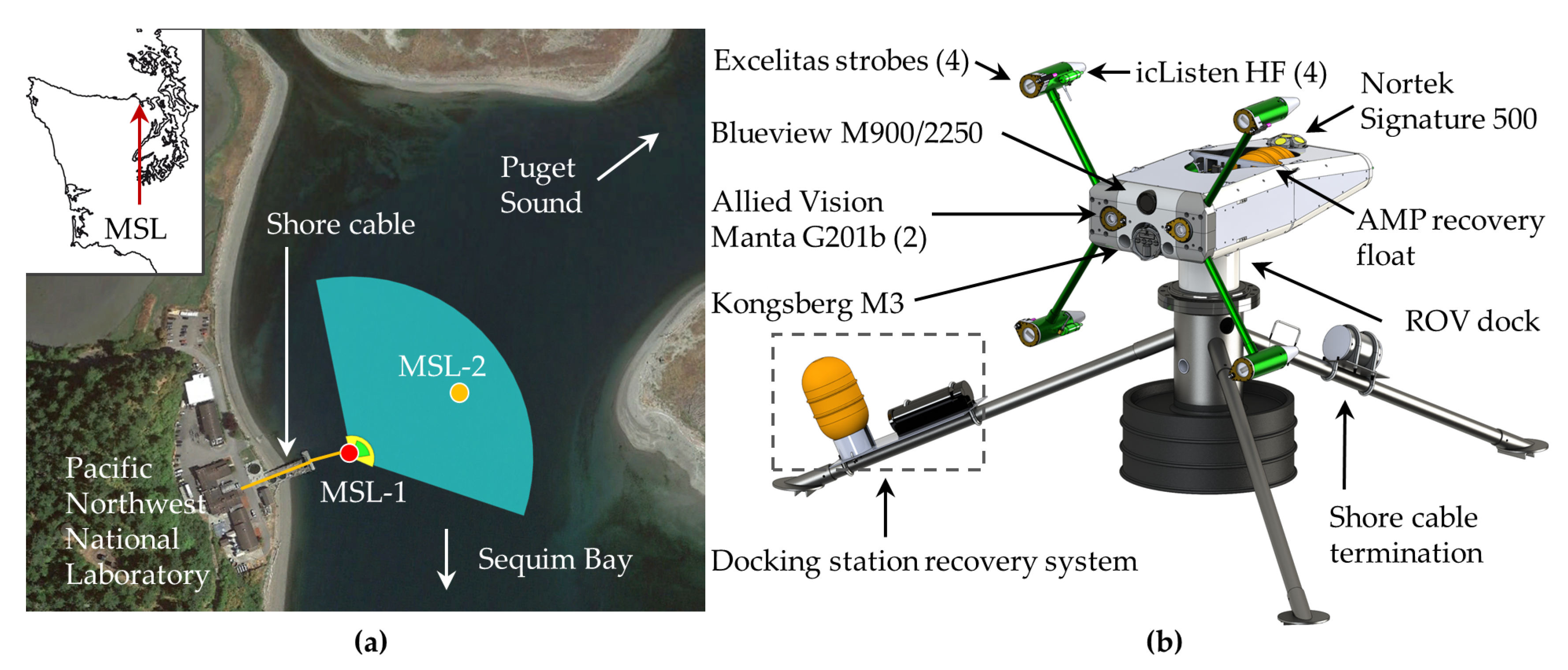
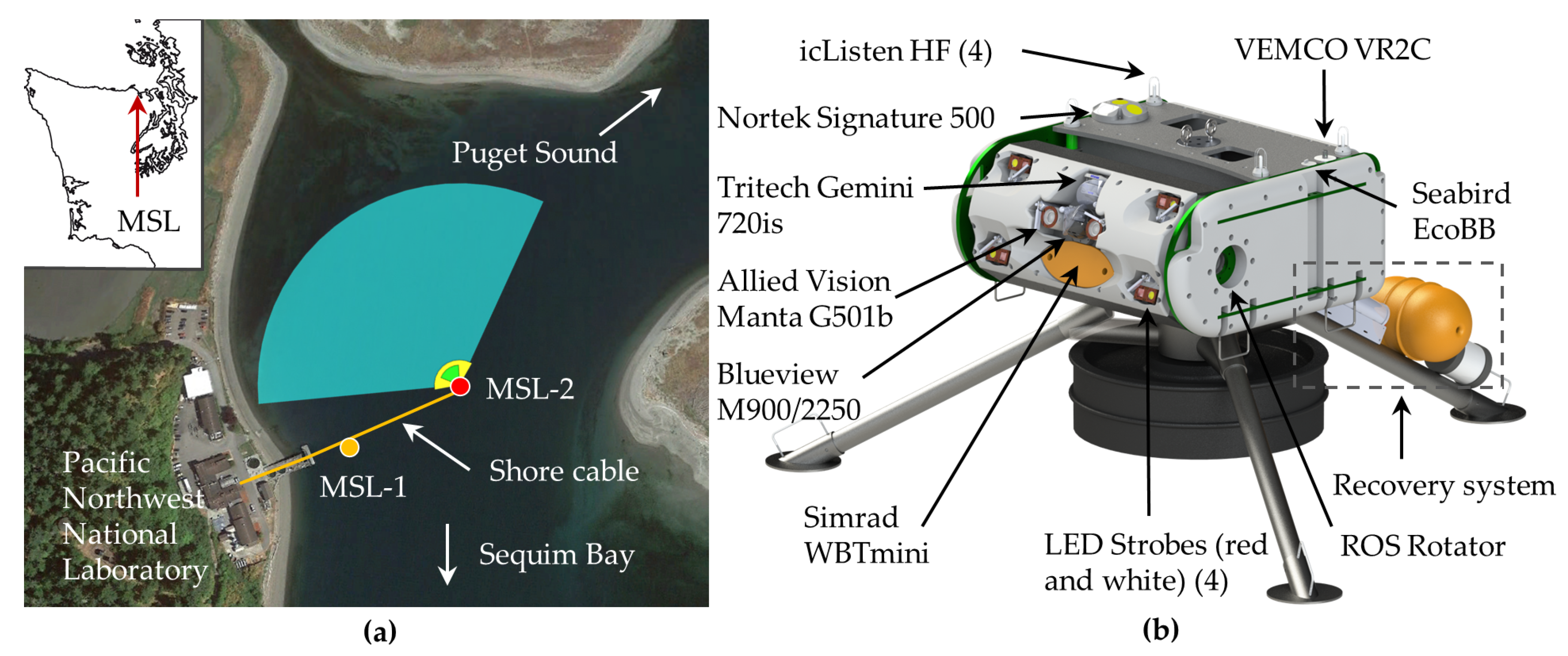
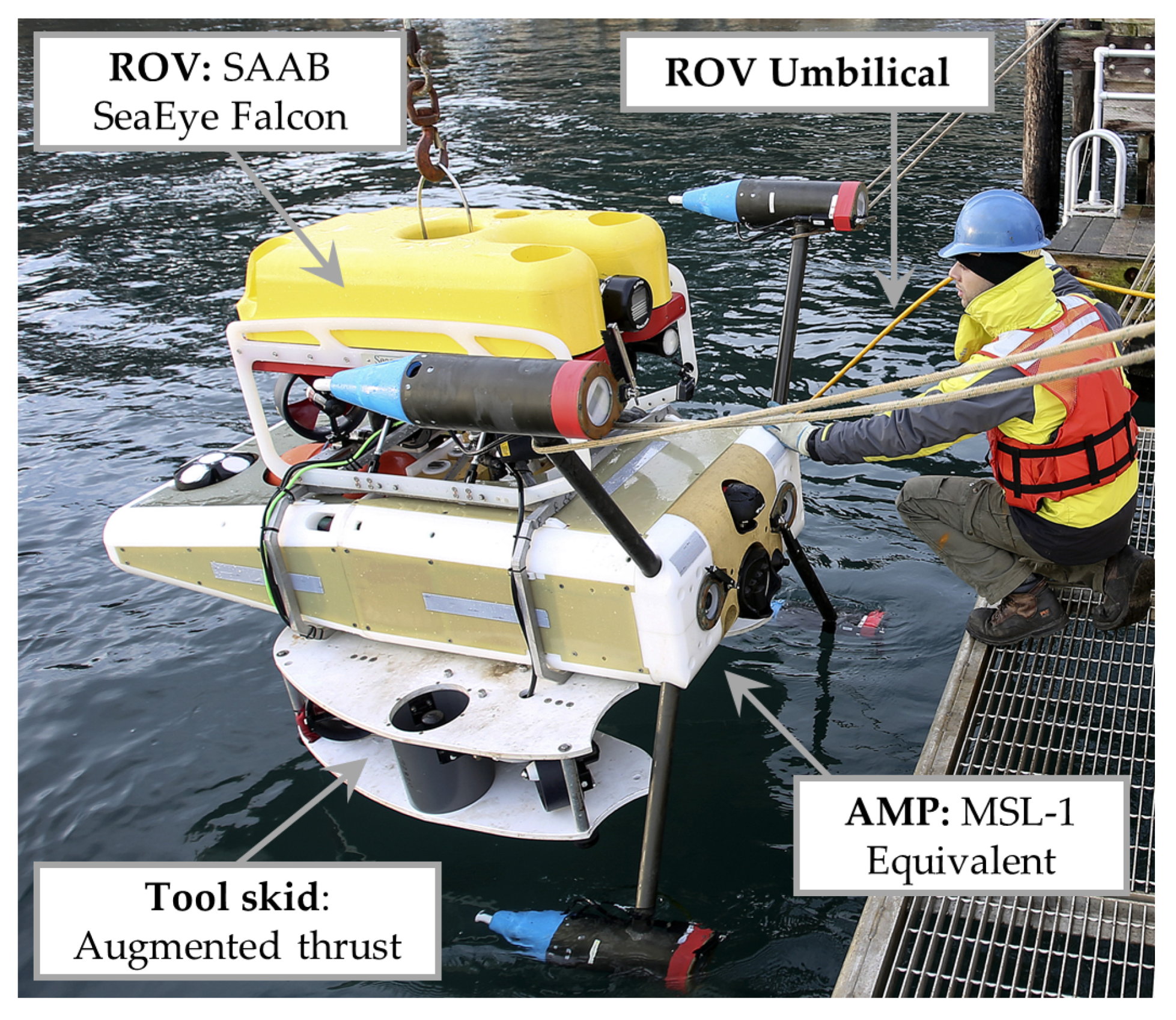
3.1. MSL-1 Demonstration
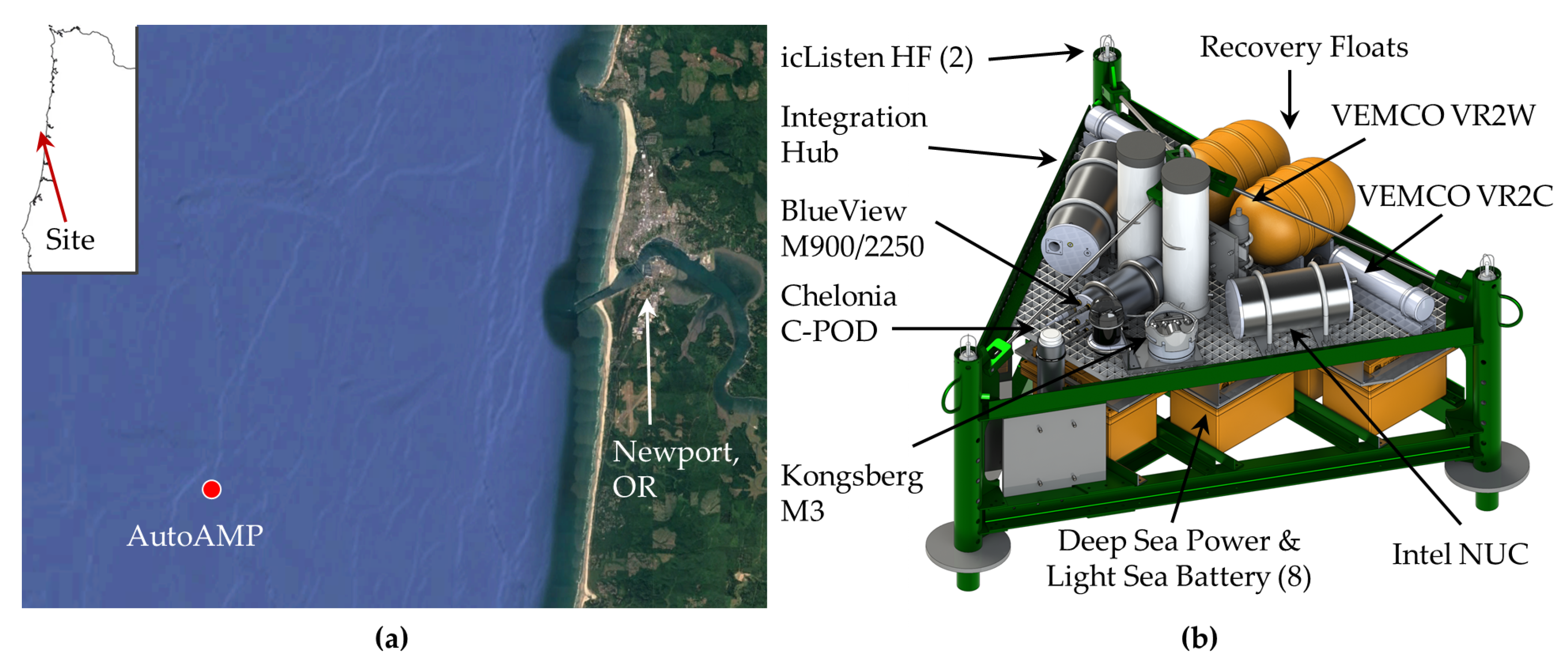
3.2. Autonomous Adaptable Monitoring Package (AutoAMP)
3.3. Wave-Powered Adaptable Monitoring Package (WAMP)
3.4. MSL-2 Demonstration
4. Results
4.1. Practical Considerations
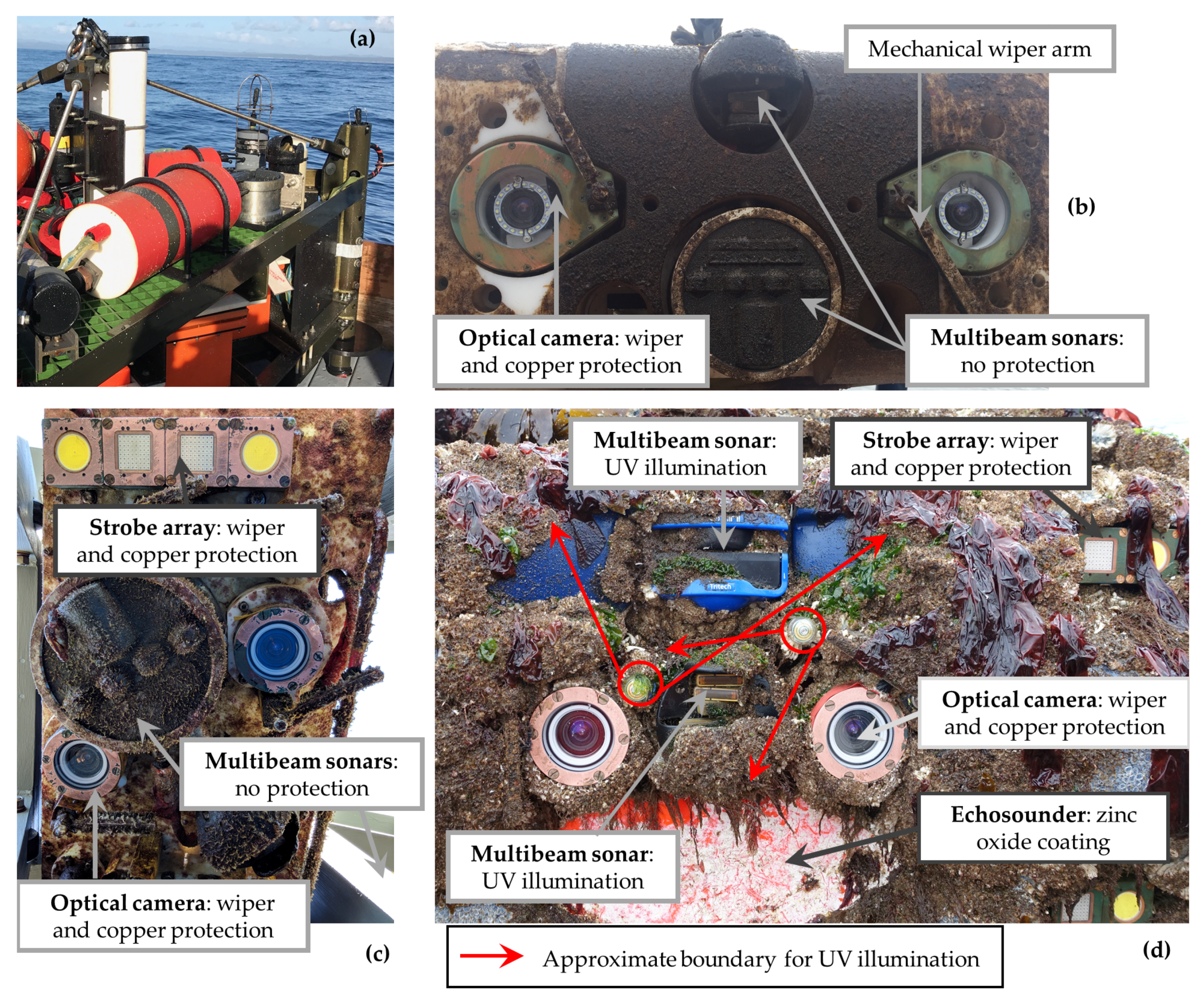
4.1.1. Biofouling and Mitigation
4.1.2. Corrosion
4.1.3. Adjustable Field of View
4.2. Sensor Performance
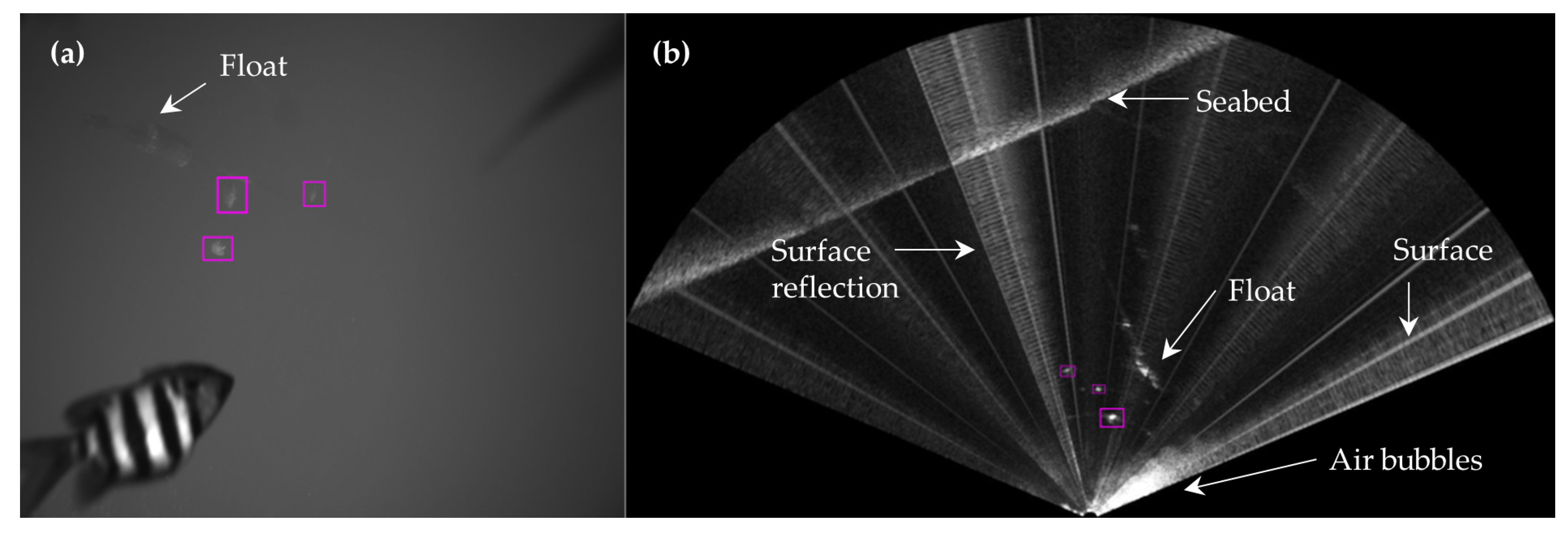
4.2.1. Optical Cameras
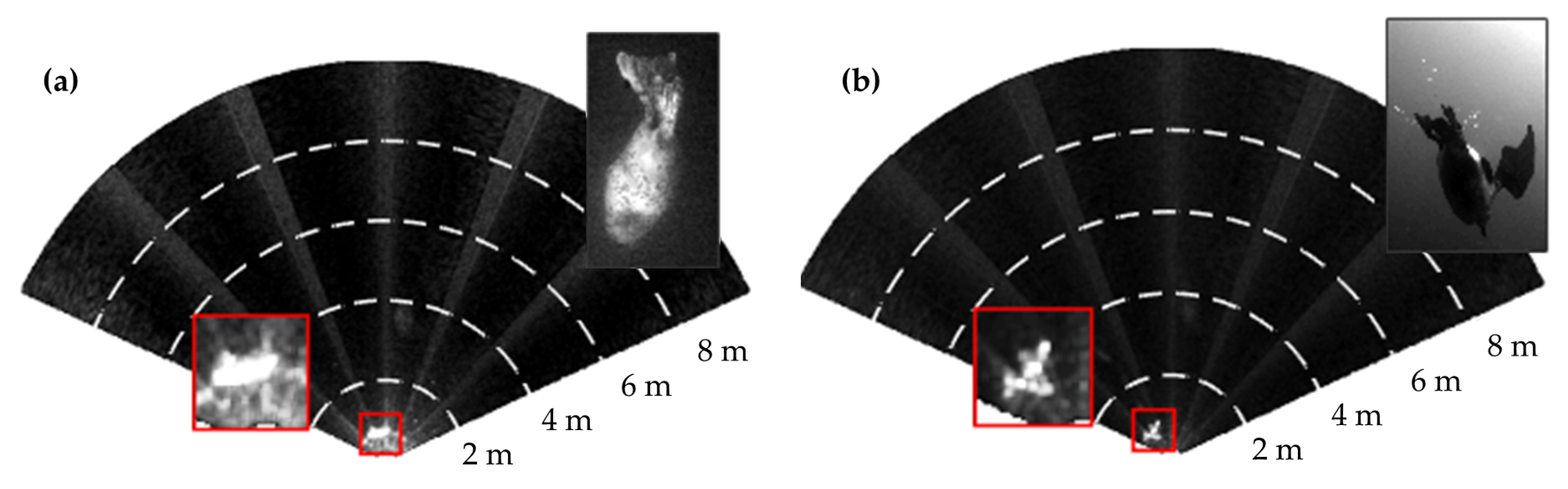
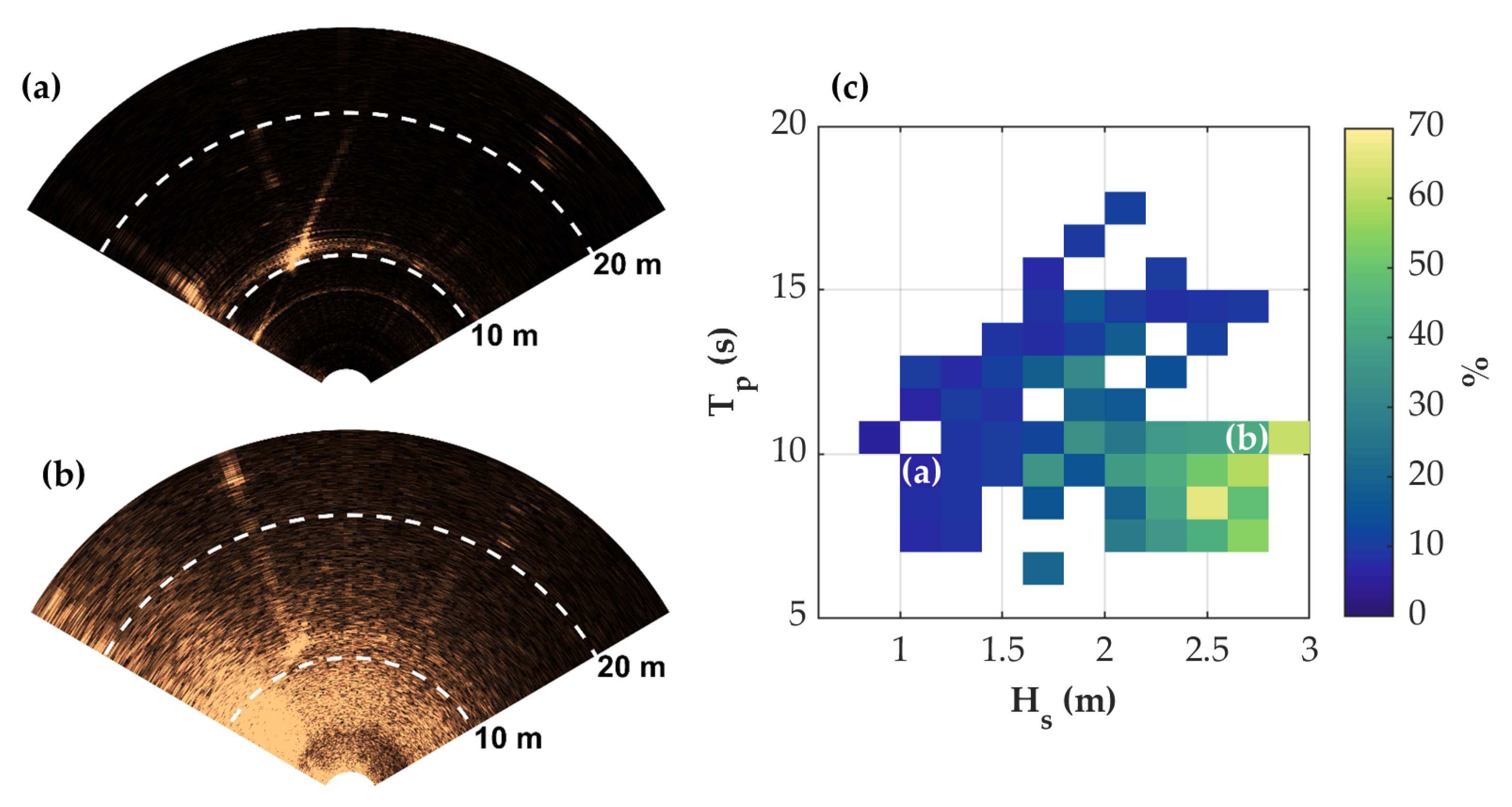
4.2.2. Multibeam Sonars
4.2.3. Passive Acoustics
4.3. Automatic Target Detection and Classification
4.3.1. Multibeam Sonar
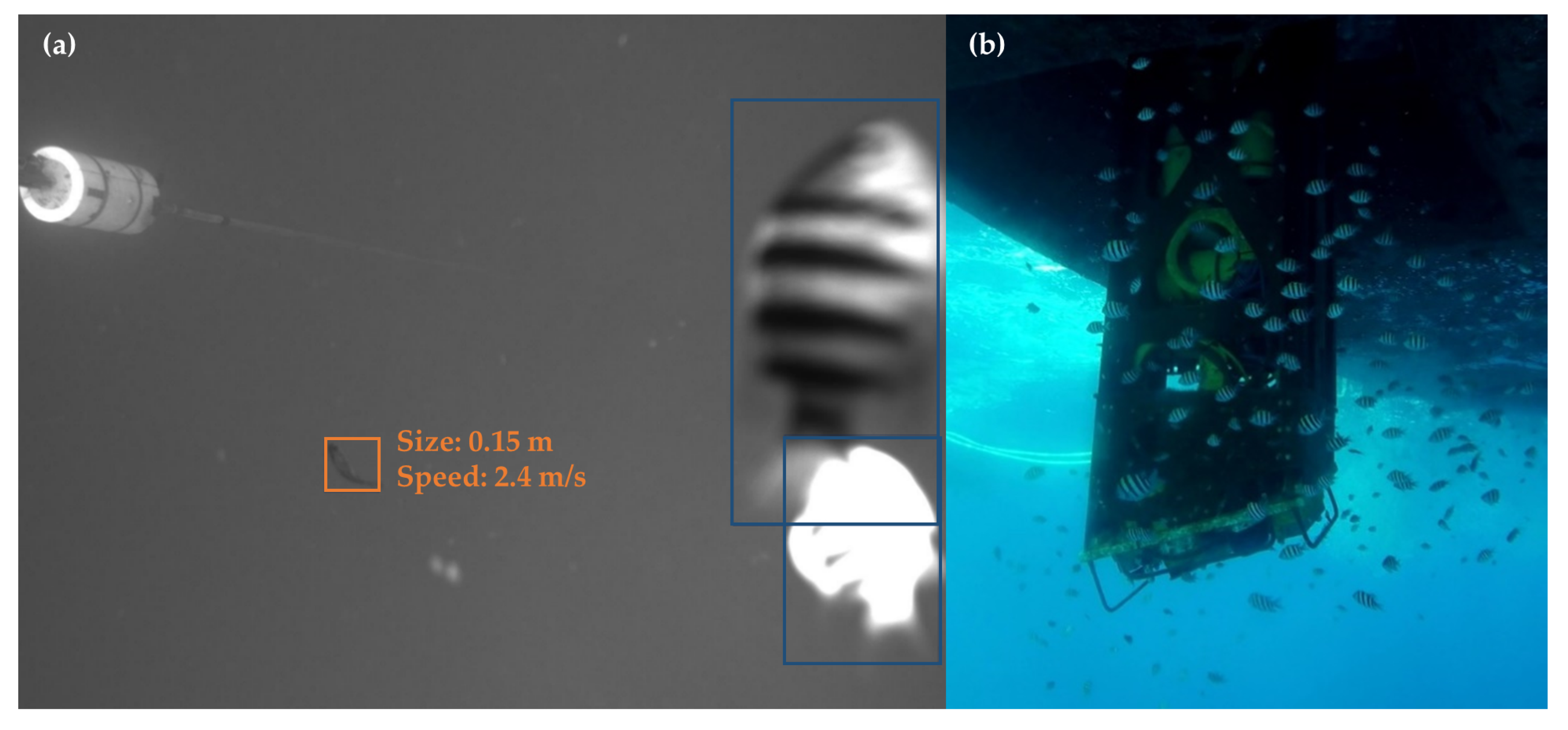
4.3.2. Optical Cameras
5. Discussion
5.1. Evidenced Requirements for Integrated Instrumentation
5.2. Operational Concepts for Integrated Instrumentation
- Securement strategy: integrated with a MEC and independent structure;
- Position in the water column: surface, mid-water, and seabed; and
- Marine energy resource: waves, oscillating tidal currents, and continuous ocean currents.
5.3. Cost-Benefit of Integration
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| 3D | Three-dimensional |
| AMP | Adaptable Monitoring Package |
| API | Application Programming Interface |
| AutoAMP | Autonomous AMP |
| DC | Direct Current |
| MSL | Marine Science Laboratory |
| PNNL | Pacific Northwest National Laboratory |
| ROV | Remotely Operated Vehicle |
| SDK | Software Development Kit |
| WAMP | Wave-powered AMP |
| WETS | Wave Energy Test Site |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component Function | Manufacturer | Model(s) |
|---|---|---|
| DC-DC power conversion | Vicor, MA, USA | DCM 200-400 VDC, DCM 48-48 VDC, Mini 48-24 VDC, Mini 48-12 VDC |
| Media conversion | Moxa, Taiwan | EDS-G516E Series |
| Serial to Ethernet conversion | Moxa, Taiwan | NPort-5200 Series |
| Sensor | Setting |
|---|---|
| Nortek Signature 500 | 0.5 m resolution and range of 8 m (MSL-1 and MSL-2) |
| BlueView M900-2250 | Compressed JPEG image format in polar coordinates (range and transducer agnostic) |
| Tritech Gemini | Compressed JPEG image format in Cartesian coordinates (range and transducer agnostic) |
| Kongsberg M3 | ASCII format with arc resolution of 0.95 (15 vertical beam angle), range resolution of 0.03 m, and range of 50 m (MSL-1 and WAMP) |
| Simrad WBTmini | Single operational channel logging to a range of 75 m with the smallest file configuration (narrowband operation with high data compression). The data rate is sensitive to signal types (broadband vs. narrowband), data compression options, and logging range [29]. The use of broadband signals with minimal compression increases the data rate by approximately two orders of magnitude. |
| Allied Vision Manta G507b | Compressed JPEG from 8-bit, monochrome image (5 Mpx) |
References
- Copping, A.; Sather, N.; Hanna, L.; Whiting, J.; Zydlewski, G.; Staines, G.; Gill, A.; Hutchison, I.; O’Hagan, A.; Simas, T.; et al. Annex IV 2016 State of the Science Report: Environmental Effects of Marine Renewable Energy Development around the World; Technical Report; International Energy Agency Ocean Energy Systems: Lisbon, Portugal, 2016.
- Copping, A.; Hemery, L. OES-Environmental 2020 State of the Science Report: Environmental Effects of Marine Renewable Energy Development Around the World; Technical Report; International Energy Agency Ocean Energy Systems: Lisbon, Portugal, 2020.
- Gunn, K.; Stock-Williams, C. Quantifying the global wave power resource. Renew. Energy 2012, 44, 296–304. [Google Scholar] [CrossRef]
- Falnes, J.; Kurniawan, A. Ocean Waves and Oscillating Systems: Linear Interactions Including Wave-Energy Extraction; Cambridge University Press: Cambridge, UK, 2020; Volume 8. [Google Scholar]
- Barnier, B.; Domina, A.; Gulev, S.; Molines, J.M.; Maitre, T.; Penduff, T.; Le Sommer, J.; Brasseur, P.; Brodeau, L.; Colombo, P. Modelling the impact of flow-driven turbine power plants on great wind-driven ocean currents and the assessment of their energy potential. Nat. Energy 2020, 5, 240–249. [Google Scholar] [CrossRef]
- Karsten, R.; Swan, A.; Culina, J. Assessment of arrays of in-stream tidal turbines in the Bay of Fundy. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2013, 371, 20120189. [Google Scholar] [CrossRef] [PubMed]
- Polagye, B.; Thomson, J. Tidal energy resource characterization: Methodology and field study in Admiralty Inlet, Puget Sound, WA (USA). Proc. Inst. Mech. Eng. Part A J. Power Energy 2013, 227, 352–367. [Google Scholar] [CrossRef]
- Lewis, M.; Neill, S.; Robins, P.; Hashemi, M. Resource assessment for future generations of tidal-stream energy arrays. Energy 2015, 83, 403–415. [Google Scholar] [CrossRef]
- Bassett, C.; Thomson, J.; Polagye, B. Sediment-generated noise and bed stress in a tidal channel. J. Geophys. Res. Ocean. 2013, 118, 2249–2265. [Google Scholar] [CrossRef]
- Polagye, B.; Copping, A.; Suryan, R.; Kramer, S.; Brown-Saracino, J.; Smith, C. Instrumentation for Monitoring around Marine Renewable Energy Converters: Workshop Final Report; Technical Report PNNL-23100; Pacific Northwest National Laboratory: Seattle, WA, USA, 2014.
- Hasselman, D.; Barclay, D.; Cavagnaro, R.; Chandler, C.; Cotter, E.; Gillespie, D.; Hastie, G.; Horne, J.; Joslin, J.; Long, C.; et al. Environmental Monitoring Technologies and Techniques for Detecting Interactions of Marine Animals with Marine Renewable Energy Devices. In OES-Environmental 2020 State of the Science Report: Environmental Effects of Marine Renewable Energy Development Around the World; Copping, A.E., Hemery, L.G., Eds.; International Energy Agency Ocean Energy Systems: Lisbon, Portugal, 2020; pp. 177–212. [Google Scholar]
- Williamson, B.J.; Blondel, P.; Armstrong, E.; Bell, P.S.; Hall, C.; Waggitt, J.J.; Scott, B.E. A self-contained subsea platform for acoustic monitoring of the environment around Marine Renewable Energy Devices–Field deployments at wave and tidal energy sites in Orkney, Scotland. IEEE J. Ocean. Eng. 2015, 41, 67–81. [Google Scholar]
- Hastie, G.D.; Gillespie, D.M.; Gordon, J.C.; Macaulay, J.D.; McConnell, B.J.; Sparling, C.E. Tracking technologies for quantifying marine mammal interactions with tidal turbines: Pitfalls and possibilities. In Marine Renewable Energy Technology and Environmental Interactions; Springer: Berlin, Germany, 2014; pp. 127–139. [Google Scholar]
- Cotter, E.; Murphy, P.; Bassett, C.; Williamson, B.; Polagye, B. Acoustic characterization of sensors used for marine environmental monitoring. Mar. Pollut. Bull. 2019, 144, 205–215. [Google Scholar] [CrossRef]
- Marchesan, M.; Spoto, M.; Verginella, L.; Ferrero, E.A. Behavioural effects of artificial light on fish species of commercial interest. Fish. Res. 2005, 73, 171–185. [Google Scholar] [CrossRef]
- Widder, E.; Robison, B.; Reisenbichler, K.; Haddock, S. Using red light for in situ observations of deep-sea fishes. Deep. Sea Res. Part I Oceanogr. Res. Pap. 2005, 52, 2077–2085. [Google Scholar] [CrossRef]
- Wiesebron, L.E.; Horne, J.K.; Hendrix, A.N. Characterizing biological impacts at marine renewable energy sites. Int. J. Mar. Energy 2016, 14, 27–40. [Google Scholar] [CrossRef]
- Wilding, T.A.; Gill, A.B.; Boon, A.; Sheehan, E.; Dauvin, J.C.; Pezy, J.P.; O’beirn, F.; Janas, U.; Rostin, L.; De Mesel, I. Turning off the DRIP (‘Data-rich, information-poor’)—Rationalising monitoring with a focus on marine renewable energy developments and the benthos. Renew. Sustain. Energy Rev. 2017, 74, 848–859. [Google Scholar] [CrossRef]
- Cotter, E.; Murphy, P.; Polagye, B. Benchmarking sensor fusion capabilities of an integrated instrumentation package. Int. J. Mar. Energy 2017, 20, 64–79. [Google Scholar] [CrossRef]
- Cowles, T.; Delaney, J.; Orcutt, J.; Weller, R. The ocean observatories initiative: Sustained ocean observing across a range of spatial scales. Mar. Technol. Soc. J. 2010, 44, 54–64. [Google Scholar] [CrossRef]
- Hayes, S.; Mangum, L.; Picaut, J.; Sumi, A.; Takeuchi, K. TOGA-TAO: A moored array for real-time measurements in the tropical Pacific Ocean. Bull. Am. Meteorol. Soc. 1991, 72, 339–347. [Google Scholar] [CrossRef]
- Kohler, P.C.; LeBlanc, L.; Elliott, J. SCOOP-NDBC’s new ocean observing system. In Proceedings of the IEEE OCEANS 2015-MTS/IEEE, Washington, DC, USA, 19–22 October 2015; pp. 1–5. [Google Scholar]
- Cotter, E.; Polagye, B. Automatic classification of biological targets in a tidal channel using a multibeam sonar. J. Atmos. Ocean. Technol. 2020. [Google Scholar] [CrossRef]
- Cotter, E.; Polagye, B. Biological detection and classification capabilities of two multibeam sonars. Limnol. Oceanogr. Methods. In revision.
- Watkins, W.A.; Schevill, W.E. Sound source location by arrival-times on a non-rigid three-dimensional hydrophone array. Deep. Sea Res. Oceanogr. Abstr. 1972, 19, 691–706. [Google Scholar] [CrossRef]
- Wahlberg, M.; Møhl, B.; Teglberg Madsen, P. Estimating source position accuracy of a large-aperture hydrophone array for bioacoustics. J. Acoust. Soc. Am. 2001, 109, 397–406. [Google Scholar] [CrossRef]
- Jaffe, J.S. Underwater optical imaging: The design of optimal systems. Oceanography 1988, 1, 40–41. [Google Scholar] [CrossRef][Green Version]
- Joslin, J.; Polagye, B.; Parker-Stetter, S. Development of a stereo-optical camera system for monitoring tidal turbines. J. Appl. Remote. Sens. 2014, 8, 083633. [Google Scholar] [CrossRef]
- Demer, D.; Andersen, L.; Bassett, C.; Berger, L.; Chu, D.; Condiotty, J.; Cutter, G. Evaluation of a Wideband Echosounder for Fisheries and Marine Ecosystem Science; Technical Report 336; ICES Cooperative Research Report; ICES: Copenhagen, Denmark, 2017. [Google Scholar]
- Joslin, J.; Polagye, B. Demonstration of biofouling mitigation methods for long-term deployments of optical cameras. Mar. Technol. Soc. J. 2015, 49, 88–96. [Google Scholar] [CrossRef]
- Joslin, J.B.; Cotter, E.D.; Murphy, P.G.; Gibbs, P.J.; Cavagnaro, R.J.; Crisp, C.R.; Stewart, A.R.; Polagye, B.; Cross, P.S.; Hjetland, E.; et al. The wave-powered adaptable monitoring package: Hardware design, installation, and deployment. In Proceedings of the 13th European Wave and Tidal Energy Conference, Napoli, Italy, 1–6 September 2019. [Google Scholar]
- Mundon, T.R. Performance evaluation and analysis of a micro-scale wave energy system. In Proceedings of the 13th European Wave and Tidal Energy Conference, Napoli, Italy, 1–6 September 2019; pp. 1686-1–1686-8. [Google Scholar]
- Freeman, S.E.; Rohwer, F.L.; D’Spain, G.L.; Friedlander, A.M.; Gregg, A.K.; Sandin, S.A.; Buckingham, M.J. The origins of ambient biological sound from coral reef ecosystems in the Line Islands archipelago. J. Acoust. Soc. Am. 2014, 135, 1775–1788. [Google Scholar] [CrossRef]
- Roberge, P.R. Handbook of Corrosion Engineering; McGraw-Hill: New York, NY, USA, 2000. [Google Scholar]
- Malinka, C.E.; Gillespie, D.M.; Macaulay, J.D.; Joy, R.; Sparling, C.E. First in situ passive acoustic monitoring for marine mammals during operation of a tidal turbine in Ramsey Sound, Wales. Mar. Ecol. Prog. Ser. 2018, 590, 247–266. [Google Scholar] [CrossRef]
- D. Rosa, I.M.; Marques, A.T.; Palminha, G.; Costa, H.; Mascarenhas, M.; Fonseca, C.; Bernardino, J. Classification success of six machine learning algorithms in radar ornithology. Ibis 2016, 158, 28–42. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Xu, W.; Matzner, S. Underwater fish detection using deep learning for water power applications. In Proceedings of the IEEE International Conference on Computational Science and Computational Intelligence (CSCI), Las Vegas, NV, USA, 13–15 December 2018; pp. 313–318. [Google Scholar]
- Papadimitriou, D.V.; Dennis, T.J. Epipolar line estimation and rectification for stereo image pairs. IEEE Trans. Image Process. 1996, 5, 672–676. [Google Scholar] [CrossRef]
- Hartley, R.I.; Sturm, P. Triangulation. Comput. Vis. Image Underst. 1997, 68, 146–157. [Google Scholar] [CrossRef]
- Rush, B.; Joslin, J.; Stewart, A.; Polagye, B. Development of an Adaptable Monitoring Package for marine renewable energy projects Part I: Conceptual design and operation. In Proceedings of the 2nd Marine Energy Technology Symposium, Seattle, WA, USA, 15–18 April 2014. [Google Scholar]
- Joslin, J.; Polagye, B.; Rush, B.; Stewart, A. Development of an adaptable monitoring package for marine renewable energy projects Part II: Hydrodynamic performance. In Proceedings of the 2nd Marine Energy Technology Symposium, Seattle, WA, USA, 15–18 April 2014. [Google Scholar]
- Sheehan, E.V.; Bridger, D.; Nancollas, S.J.; Pittman, S.J. PelagiCam: A novel underwater imaging system with computer vision for semi-automated monitoring of mobile marine fauna at offshore structures. Environ. Monit. Assess. 2020, 192, 11. [Google Scholar] [CrossRef]
| 1. | Specialized hydrophones that continuously monitor for unique identifiers that are acoustically broadcast by tags attached to or implanted in fish. |
| 2. | This is common practice for some autonomous sensors. For example, one passive acoustic sensor for quantifying cetacean presence-absence, the C-POD-F (Chelonia Ltd., Cornwall, UK) continuously monitors frequencies between 20 kHz and 160 kHz by sampling at 1 MHz, but processes the data in real time to identify candidate echolocation clicks and archives only statistical information about those clicks for post-recovery analysis. Similar principles apply to fish tag receivers. The Vemco VR2W (Innovasea, Bainbridge Island, WA, USA) continuously monitors for tags with a transmit frequency of 69 kHz, but only stores the time and unique tag identifier of decoded detections. |
| 3. | As a specific example, the load on the primary Vicor DC-DC power converters in the integration hub (Table A1) had a measureable effect on the noise floor for the WBTmini echosounder, even though the power busses were nominally independent. In passive mode, the WBTmini noise floor varied by more 14 dB, based on which instruments were energized, including mechanical wipers and UV lights. This change in noise floor has the effect of reducing the echosounder’s operational range and signal-to-noise ratio. |













| Category | Sensor | Input Voltage [VDC] | Maximum Acquisition Rate (Stand-Alone / AMP Synchronized) [Hz] | Power Requirement (Synchronized Acquisition Rate) [W] | Data Rate (Single Instrument) | Comms Protocol | Field of View | Maximum Range [m] |
|---|---|---|---|---|---|---|---|---|
| Acoustic Doppler current profiler | Nortek Signature 500 (Norway) | 12–48 | 8/5 | 23 | <3 × 10 | RS-232 or Ethernet | 2.9 beam width | 70 |
| Multibeam sonar | BlueView M900-2250 (U.S.) | 12–48 | 15/10 | 19.2 | <0.1 MB/frame | Ethernet | 130 × 20 swath | 200 kHz: 10 900 kHz: 100 |
| Tritech Gemini (U.K.) | 19–72 | 97/19 | 16–27 | <0.1 MB/frame | Ethernet | 130 × 20 swath | 120 | |
| Kongsberg M3 (Norway) | 12–36 | 40/10 | 24.0 | < 1.3 MB/frame | Ethernet | 120 × 3,7,15, or 30 swath | 150 | |
| Echosounder | Simrad WBTmini (w/ 38/200 kHz combi- transducer) (Norway) | 12–16 | 38 kHz: <4/<4 200 kHz: >10/10 Passive: /10 | 38 kHz: 6 200 kHz: 3 Passive: 2 | 0.002 MB/ping | Ethernet | 18 beam width | 38 kHz: >500 200 kHz: >100 |
| Passive acoustic | Vemco VR2C (Canada) | 10–32 | N/A | 0.2 | < 0.001 MB/message | RS-232 | Omni- directional | N/A |
| icListen HF (Ocean Sonics, Canada) | 24 | 512,000/512,000 | 3.6 | 3 × 10 MB/sample | Ethernet | |||
| Optical backscatter | SeaBird ecoBB (650 nm) (U.S.) | 7–15 | 8 | <1 | 3 × 10 MB/sample | RS-232 | N/A | N/A |
| Optical camera | Allied Vision Manta G201b & G507b (Canada) | 12 | 23/10 | 4.8 | <0.3 MB/frame | Ethernet | 65 × 56 | 0–30 |
| Xenon strobe | Excelitas MVS-500 (U.S.) | 12 | 14/10 | 63.6 | N/A | N/A | N/A | N/A |
| LED strobe (red/white) | Custom LED Arrays | 48 | Continuous/ camera-limited | 49 | N/A | N/A | N/A | N/A |
| Deployment | MSL-1 | AutoAMP | WAMP | MSL-2 |
|---|---|---|---|---|
| Location | Sequim Bay, WA, USA (MSL) 484.76’ N, 1232.68’ W | Newport, OR, USA (PacWave) 4432.86’ N, 12413.78’ W | Kaneohe, HI, USA (WETS) 2127.94’ N, 15745.04’ W | Sequim Bay, WA, USA (MSL) 484.79’ N, 1232.60’ W |
| Dates (duration) | 10 January–28 March 2017 (77 days) | 15 August–29 September 2017 (44 days) | 15 October 2018–28 January 2019 (105 days) | 30 January–28 May 2019 (118 days) |
| System availability/activity | ≈90%/90% | >99%/1.7% | 84%/84% | 96%/96% |
| Deployment type | Cabled bottom lander | Autonomous bottom lander | Autonomous surface platform | Cabled bottom lander |
| Distance to shore | 0.1 km | 12.5 km | 1.5 km | 0.2 km |
| Water depth | 8 m (MLLW) | 70 m | 30 m | 7 m (MLLW) |
| Dominant environment | Tidal current | Wave | Wave | Tidal current |
| Power requirement | 373 W | 161 W | 696 W | 240 W |
| Power source | Shore cable | Battery bank (6900 Wh capacity) | Battery-backed wave energy converter | Shore cable |
| Real-time processing | Multibeam sonar triggered acquisition | — | Multibeam sonar triggered acquisition | Multibeam sonar triggered acquisition and classification |
| Primary sensor orientation | Across-channel, fixed | Upward-looking, fixed | Downward-looking, fixed | Across-channel, variable tilt |
| Biofouling mitigation | Camera and strobe wipers | — | Camera and strobe wipers | Camera and strobe wipers UV lights for sonars |
| Optical sensors | ||||
| Cameras | Allied Vision Manta G-201b | — | Allied Vision Manta G-507b | Allied Vision Manta G-507b |
| Illumination | Excelitas MVS-5000 | — | Custom white and red LEDs | Custom white and red LEDs |
| Optical backscatter | — | — | — | Seabird ecoBB |
| Passive acoustic sensors | ||||
| Hydrophone | OceanSonics icListen HF (4) | OceanSonics icListen HF (3) | OceanSonics icListen HF (2) | OceanSonics icListen HF (4) |
| Fish tag receiver | — | Vemco VR2C | — | Vemco VR2C |
| Active acoustic sensors | ||||
| Multibeam sonars | BlueView M900-2250 Kongsberg M3 | BlueView M900-2250 Kongsberg M3 | BlueView M900-2250 Kongsberg M3 | BlueView M900-2250 Tritech Gemini 720is |
| Echosounder | — | — | — | Simrad WBTmini |
| Acoustic Doppler current profiler | Nortek Signature 500 | — | — | Nortek Signature 500 |
| Operations | Maintenance | |||
|---|---|---|---|---|
| Environment | Instrument Location | Integrated with MEC | Independent Platform | |
| Surface (<2 m) | • High structural loads on sensors • Significant platform motion possible • Air bubbles occlude field of view | • Air-side access to sensors | • Air-side access to cable | |
| Waves | Mid-water (25 m) | • Moderate structural loads and limited platform motion | • ROV or diver intervention | • Heavy lift capacity to raise platform and cable to surface (more significant mooring and anchoring requirement than platform on seabed) |
| Seabed (50 m) | • Low structural loads and no platform motion | • ROV intervention | • Moderate lift capacity to raise platform and cable to surface | |
| Surface (<2 m) | • Highest structural loads: strongest currents at surface Air bubbles occlude field of view | • Air-side access to sensors | • Air-side access to cable | |
| Oscillatory Tidal Currents | Mid-water (<2 m) | • Moderate structural loads: currents decrease with depth | • ROV or diver intervention during slack water | • Heavy lift capacity to raise platform and cable to surface during slack water |
| Seabed (50 m) | • Lowest structural loads: currents at minimum near seabed | • ROV intervention during slack water | • Heavy lift capacity to raise platform and cable to surface during slack water | |
| Surface (<2 m) | • Highest structural loads: strongest currents at surface • Air bubbles occlude field of view | • Air-side access to sensors | • Air-side access to cable | |
| Continuous Ocean Currents | Upper water column (50 m) | • Moderate structural loads: currents decrease with depth | • High-thrust ROV required | • Heavy lift capacity vessel with high thrust required |
| Seabed (300 m) | • Stand-off between sensors and turbine exceeds sensor range | • ROV with launch and recovery system to overcome drag in upper water column | • Heavy lift capacity vessel with high thrust required | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Polagye, B.; Joslin, J.; Murphy, P.; Cotter, E.; Scott, M.; Gibbs, P.; Bassett, C.; Stewart, A. Adaptable Monitoring Package Development and Deployment: Lessons Learned for Integrated Instrumentation at Marine Energy Sites. J. Mar. Sci. Eng. 2020, 8, 553. https://doi.org/10.3390/jmse8080553
Polagye B, Joslin J, Murphy P, Cotter E, Scott M, Gibbs P, Bassett C, Stewart A. Adaptable Monitoring Package Development and Deployment: Lessons Learned for Integrated Instrumentation at Marine Energy Sites. Journal of Marine Science and Engineering. 2020; 8(8):553. https://doi.org/10.3390/jmse8080553
Chicago/Turabian StylePolagye, Brian, James Joslin, Paul Murphy, Emma Cotter, Mitchell Scott, Paul Gibbs, Christopher Bassett, and Andrew Stewart. 2020. "Adaptable Monitoring Package Development and Deployment: Lessons Learned for Integrated Instrumentation at Marine Energy Sites" Journal of Marine Science and Engineering 8, no. 8: 553. https://doi.org/10.3390/jmse8080553
APA StylePolagye, B., Joslin, J., Murphy, P., Cotter, E., Scott, M., Gibbs, P., Bassett, C., & Stewart, A. (2020). Adaptable Monitoring Package Development and Deployment: Lessons Learned for Integrated Instrumentation at Marine Energy Sites. Journal of Marine Science and Engineering, 8(8), 553. https://doi.org/10.3390/jmse8080553