1. Introduction
With the development of human science and technology, the exploration process of the ocean is gradually expanding to include deeper depths and more remote locations, and the research on the structure and the internal dynamics of the deep earth has become critical. The detection of ocean seismic waves serves to notice the thermal or compositional anomalies in Earth’s mantle and core [
1,
2,
3], and to image the mantle plume [
4]. However, the lack of the ocean seismic stations poorly constrained the unveiling of the earth structure due to its 70% coverage by water. The formation of the ocean seismograph network is of great significance and value to scientific research [
5], and floating ocean seismographs (FOS) can exactly realize such value [
6]. It is a vertical underwater vehicle used to observe
P waves (primary waves, the first signal from an earthquake) in ocean earthquakes [
7,
8].
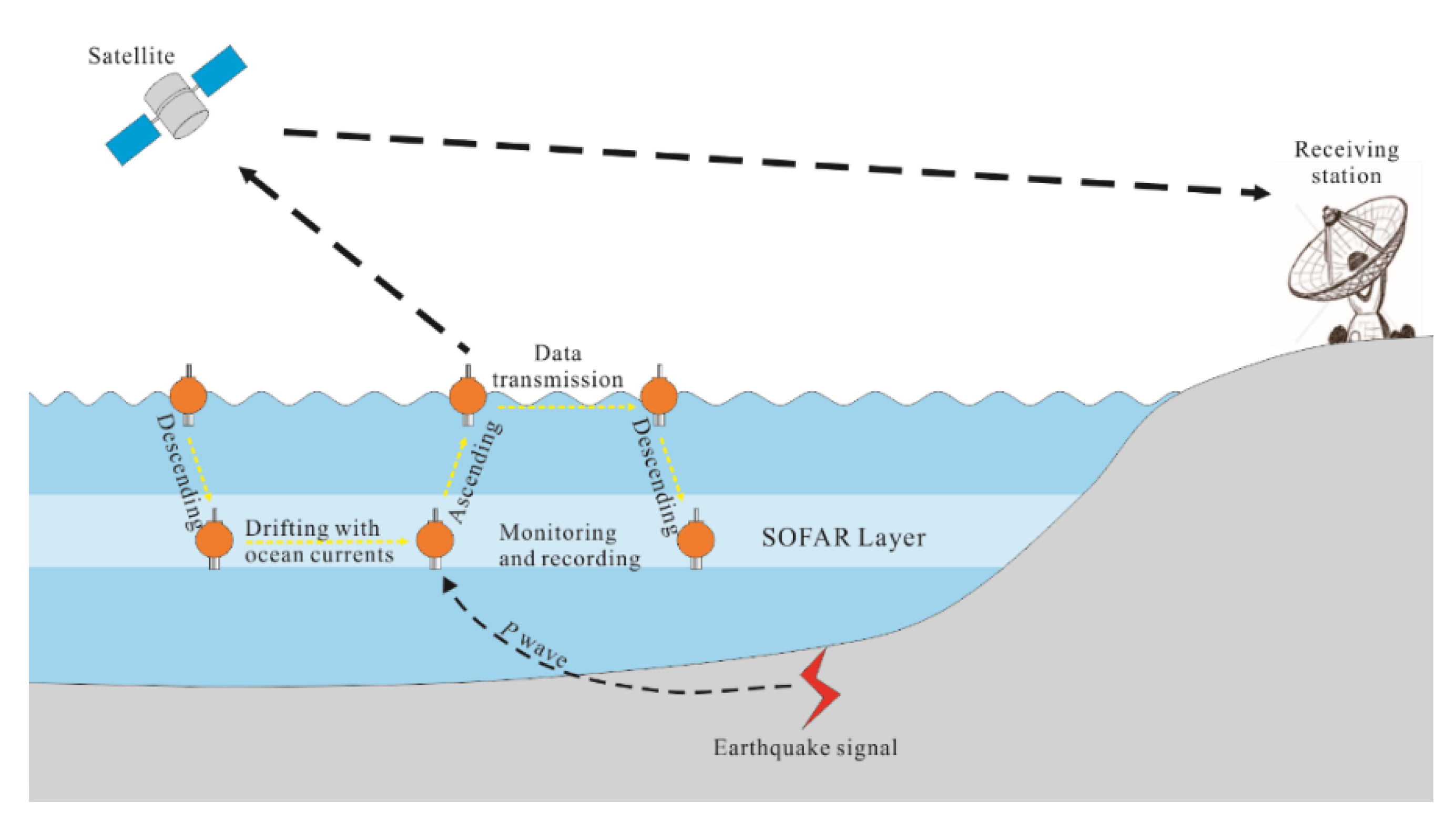
Unlike the conventional stationary land seismic stations and submersible ocean bottom seismographs (OBS), FOS is suspended in the water column during its work time after diving to the desired parking depth set in the SOFAR (sound fixing and ranging channel) layer shown in
Figure 1 [
1]. It is used to detect seismic waves and record seismic signals while drifting with ocean currents. It rises to the surface and transmits the data to the satellite when
P waves are detected or the memory card is full. Then, it dives and another cycle starts. After a number of FOSs are densely deployed, they drift along with ocean currents with no need of a horizontal thruster or any other form of power engine and spread over the oceanic area, forming a global scope of seismic monitoring network [
9]. Its global positioning system (GPS) makes the real-time transmission of data more convenient [
2]. Its buoyancy control system controls its dive to the preset parking depth and float to the surface to communicate with satellite.
In the working process, FOS fluctuates with flows and currents at the water depth of 1000 m and may be subject to disturbance forces from flows, currents, sea animals, and other uncertain objects. This would affect the real depth of FOS resulting in lower measurement accuracy and even lead to bottoming out with unsatisfactory depth control. It is also known that as the depth of the FOS increases, its buoyancy varies due to the density change of seawater. While the variable buoyancy system (VBS) is used to adjust FOS drainage volume to change its buoyancy, mainly depending on its design is difficult to achieve the accurate depth control. Furthermore, to reduce the impact caused by the disturbing forces, the response performance of FOS under the disturbing forces should also be critical and be verified, as well. Therefore, to tackle the abovementioned challenges, this paper mainly proposes the design of a depth controller for FOS with fast response, zero overshoot, nearly no steady-state error, and high robustness, so that when FOS detects a seismic wave, it could respond accurately, rising to the surface and sending the data signal to satellite, and then quickly diving to the desired parking depth to resume the detection work without accidental bottoming damage. In addition, precise depth position can keep different FOSs at different depths so that they would not collide with each other in the future network control research.
At present, the existing basic control methods mainly include proportional–integral–derivative (PID) control [
10], sliding mode control (SMC) [
11], neural network control [
12], predictive control [
13], and fuzzy logic control (FLC) [
14,
15]. Their advantages and disadvantages are as shown in
Table 1 [
16].
With the consideration that FOS requires long-term steady work under water and the movement of diving and surfacing to transmit signals cannot be too slow, neural network control and predictive control are not considered because they need a long time to train and calculate. The PID control method is widely used in marine industrial products because of its simple structure and easy operation [
17,
18], the fuzzy logic control method is renowned for its simplicity, robustness, and anti-interference ability [
14,
19], and sliding mode control is useful for nonlinear system despite its tendency to cause “tremor” (small, rapid fluctuations in position). Two of these three control methods could be incorporated to control nonlinear systems such as FOS, and such controllers are mainly fuzzy PID controller (F-PID) [
20,
21] and fuzzy sliding mode controller (F-SMC) [
22,
23]. To some extent, the fuzzy logic method can improve the weak points of PID control and sliding mode control, but we do not know which is better. To deal with the problem that which one of the controllers is the most suitable for the FOS depth control, different controllers should be designed and analyzed. In addition, the controller to be designed for FOS thereupon is required to be able to achieve the following four goals:
Satisfy the depth control requirements, especially the ability to maintain position at a parking depth.
Control FOS with sufficient stability, shorter adjustment time, smaller overshoot, and smaller steady-state error approaching zero while hovering in the sea.
Have better dynamic characteristics compared with a traditional PID controller and a sliding mode controller (fuzzy logic control has certain steady-state error, so it is not taken into consideration).
Have good anti-interference ability and robustness.
After a brief introduction, this paper is organized as follows.
Section 2 analyzes the forces that FOS is subject to and derives its dynamic model as the controller design basis with the consideration of the influence of seawater density change on the buoyancy.
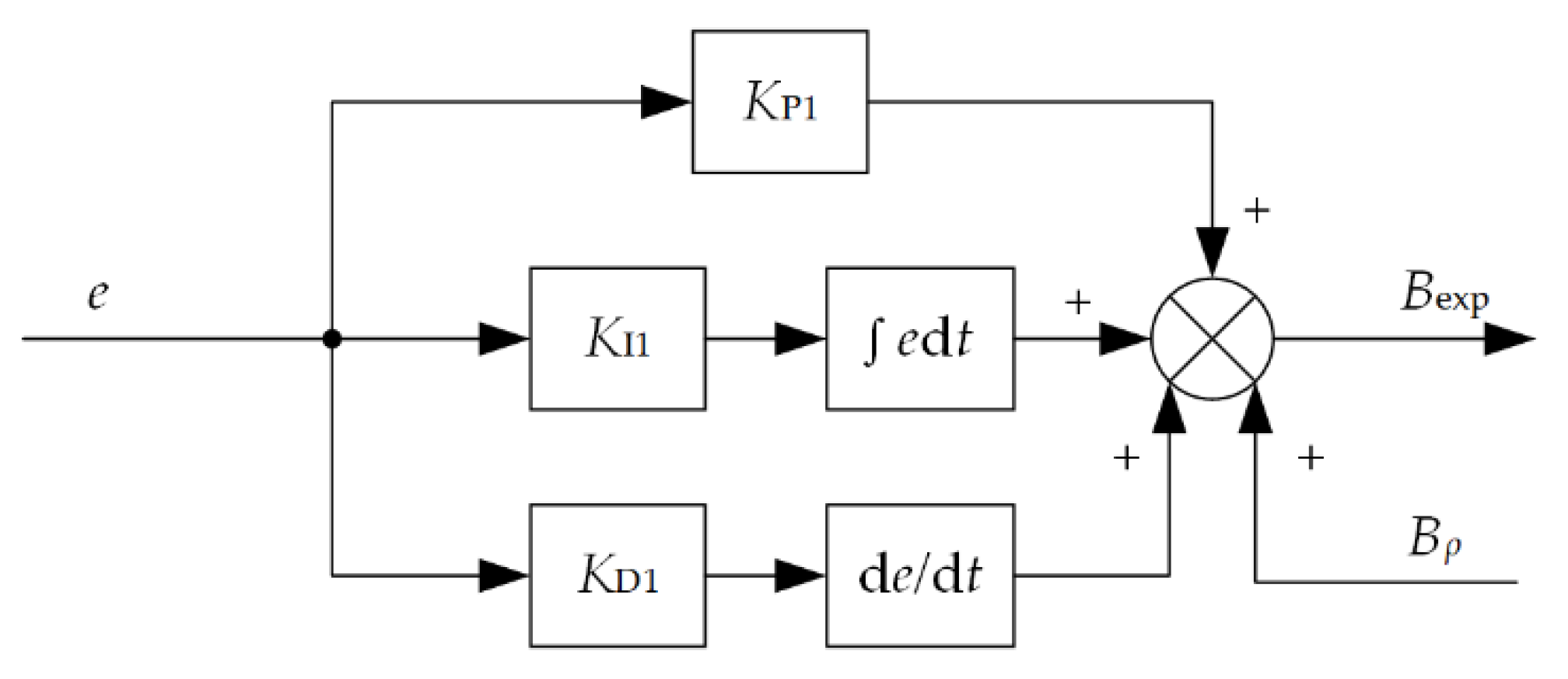
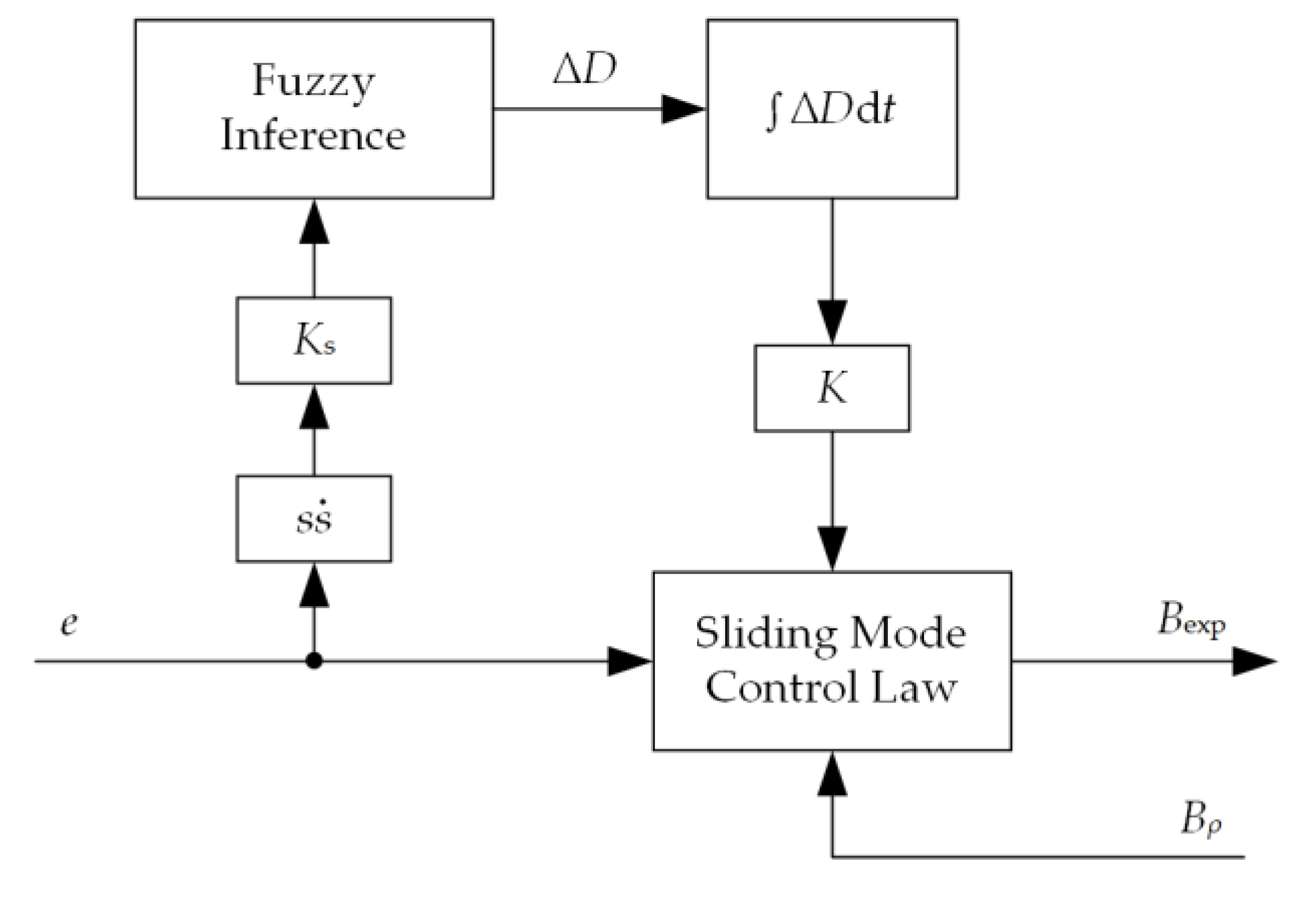
Section 3 describes the design of different controllers for FOS depth control, including PID controller, fuzzy PID controller, sliding mode controller, and fuzzy sliding mode controller. In
Section 4, the simulation comparisons and the analysis results are elaborated and conclusions are presented in
Section 5.
4. Simulation Results and Analysis
The different depth controllers designed in
Section 3 are implemented and simulated in MATLAB/SIMULINK, and their performance is compared with each other.
To analyze the effect of seawater density change, the PID controller is used to compare the two cases with and without the variation of buoyancy caused by the change of seawater density
Bρ, and the response curves are shown in
Figure 10.
This figure shows that when the depth is lower than 200 m, whether considering the influence of seawater density has little effect on the response result; while the depth exceeds 200 m, the response time with considering the influence of seawater density is significantly faster than that without consideration of Bρ. Therefore, subsequent simulations are implemented considering the variation of buoyancy caused by the change of sea density Bρ.
4.1. Simulation and Analysis without Disturbing Force
The response of the system can be observed by inputting a step signal with an amplitude of 1000 signifying the target parking depth. The processes of FOS first diving from the surface (z = 0 m) to 1000 m and then suspending are simulated. For discussion, the results are compared with each other based on four performance parameters, which is the rise time, settling time, steady-state error, and maximum overshoot. The descriptions of different controllers are listed in
Table 6.
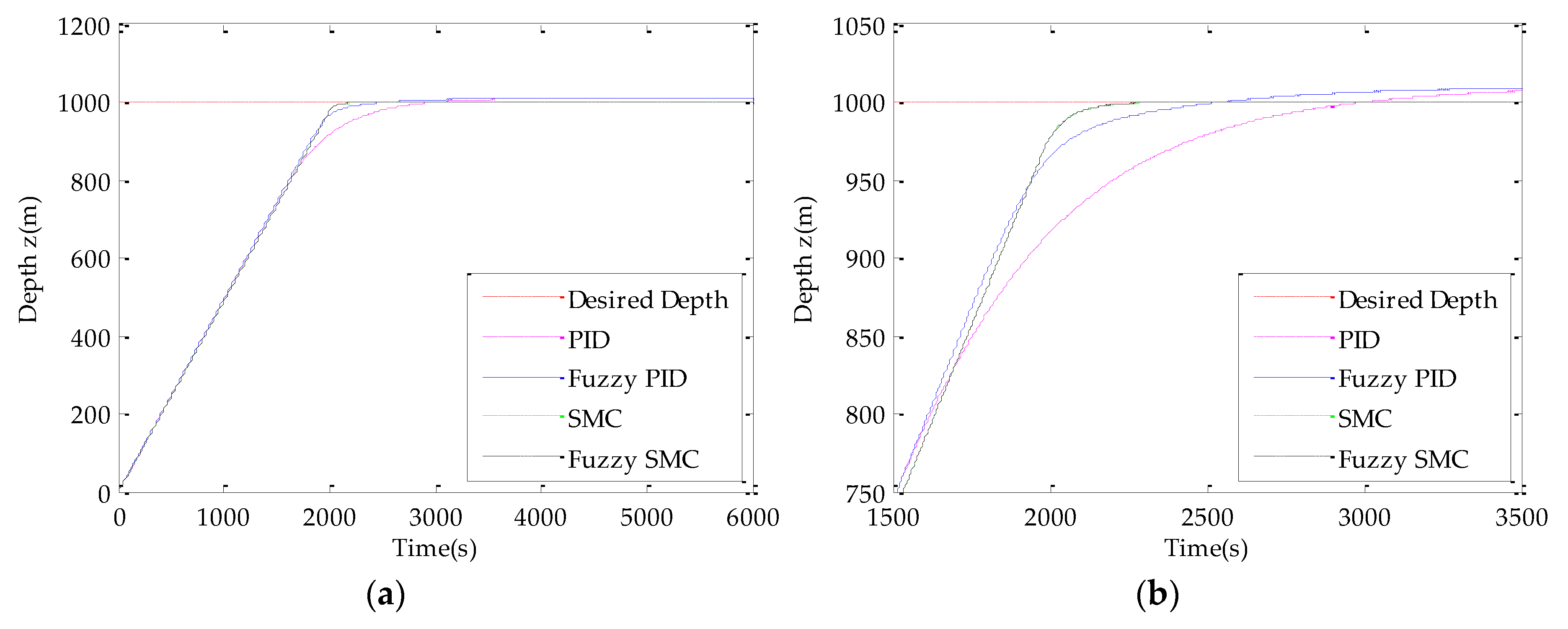
The depth control response curves of FOS with PID, fuzzy PID, sliding mode, and fuzzy sliding mode controllers are shown in
Figure 11. It indicates that the depth response curves of the four control methods have almost no oscillation and tend to be stable. Approximately from 0–1500 s, the curves of the four controllers almost coincide due to the maximum volume flow rate of VBS. The velocity curves based on the four controllers are shown in
Figure 12. It can be seen from the figure that the sinking speeds of the FOS with different controllers are 0.50 m/s (PID, Fuzzy PID), 0.49 m/s (SMC, Fuzzy SMC), respectively. For further analysis, characteristic response parameters obtained from the simulation results are presented in
Table 7. Since the depth curves of SMC and fuzzy SMC methods do not reach 1000 with the steady-state error of -0.2 m, their maximum overshoots are approximately equal to 0.
Compared with the traditional PID controller, the fuzzy PID controller has better performance with the rise time reduced by 5.37%, the settling time decreased by 17.16%, the steady-state error decreased by 2.94%, and the maximum overshoot decreased by 3.02%. Compared with the sliding mode controller, the characteristic parameters of fuzzy sliding mode controller change a little. However, its velocity is more stable than the SMC method, which greatly saves its energy consumption. These indicate that in the depth control of FOS, the performance of fuzzy PID controller and fuzzy sliding mode controller is significantly better than pure PID controller and SMC controller. Furthermore, except for the rise time, the fuzzy sliding mode controller has shorter settling time (decreased by 7.8%), smaller steady-state error (decreased by 99.02%), and lower maximum overshoot compared with the fuzzy PID controller. The conclusion can be drawn that the designed fuzzy sliding mode controller has the advantages of fast response, high precision, and excellent steady-state performance without disturbing force.
4.2. Simulation and Analysis with Disturbing Force
To analyze the anti-interference ability of the designed controller, a disturbing force as Equation (24) is added to the system. The response curves of the four controllers in the presence of disturbing force are shown in
Figure 13, of which the corresponding characteristic parameters are shown in
Table 8 (due to the existing of the disturbing force, the response curves are fluctuating and the steady-state error does not exist.).
In general, the parameters of these four control methods have changed while adding the disturbing force. To further compare the performance of the four control methods in the presence of disturbing force, the characteristic parameters without external disturbing force are subtracted from that with disturbing force, and the change of each parameter is shown in
Table 9.
It shows that under the same conditions of disturbing force, the changes of parameters for fuzzy PID control, SMC, and fuzzy SMC are less than that for the PID control. While the changes of settling time have only slight differences among the four controllers, the change of rise time for the fuzzy SMC method is the littlest. Additionally, its maximum overshoot is always small. Therefore, the designed fuzzy SMC controller shows better anti-interference capability and robustness and has better dynamic performance.
5. Conclusions
For the depth control of FOS, its mathematical model has been obtained based on the hydrodynamic equation and on the characteristic parameters of the buoyancy control device with considering the variation of seawater density with depth. By simulating the processes of diving and suspending in the cases with and without disturbing force, the designed fuzzy sliding mode controller has been compared with a traditional PID controller, a fuzzy PID controller, and a sliding mode controller. The results demonstrate that in both cases, the fuzzy sliding mode controller could achieve the expected depth in the nearly shortest time with the minimum steady-state error and overshoot, which indicates its rapid response capability, good stability, and high accuracy. In addition, its change of rise time caused by disturbing force is smaller than the other three controllers. This indicates its possession of good robustness and anti-interference ability. Moreover, the consideration of the changes of seawater density with depth in the design of the depth controller for FOS to enable the adaptive adjustment in real time is a highlight for the controller design. Therefore, we carefully draw the conclusion that the proposed fuzzy sliding mode controller could satisfy the depth control requirements of FOS.
In the application of depth control for the similar underwater vehicle, if a PID controller must be used, the fuzzy logic method can be implemented with it as fuzzy PID to reach the stable depth faster. If a sliding mode controller is able to be used, it is better than PID and F-PID, but it cannot guarantee the stability of the actuator. If good depth response performances and actuator stability are required at the same time, the fuzzy sliding mode controller is much better. However, in our research, there remains some issues here that the anti-interference performance of the FOS is still not optimal, so an observer will be considered in our next step work, and the experiments in South Sea shall be carried out to test FOS performances.

 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}