Effect of Top Tension on Vortex-Induced Vibration of Deep-Sea Risers


Abstract
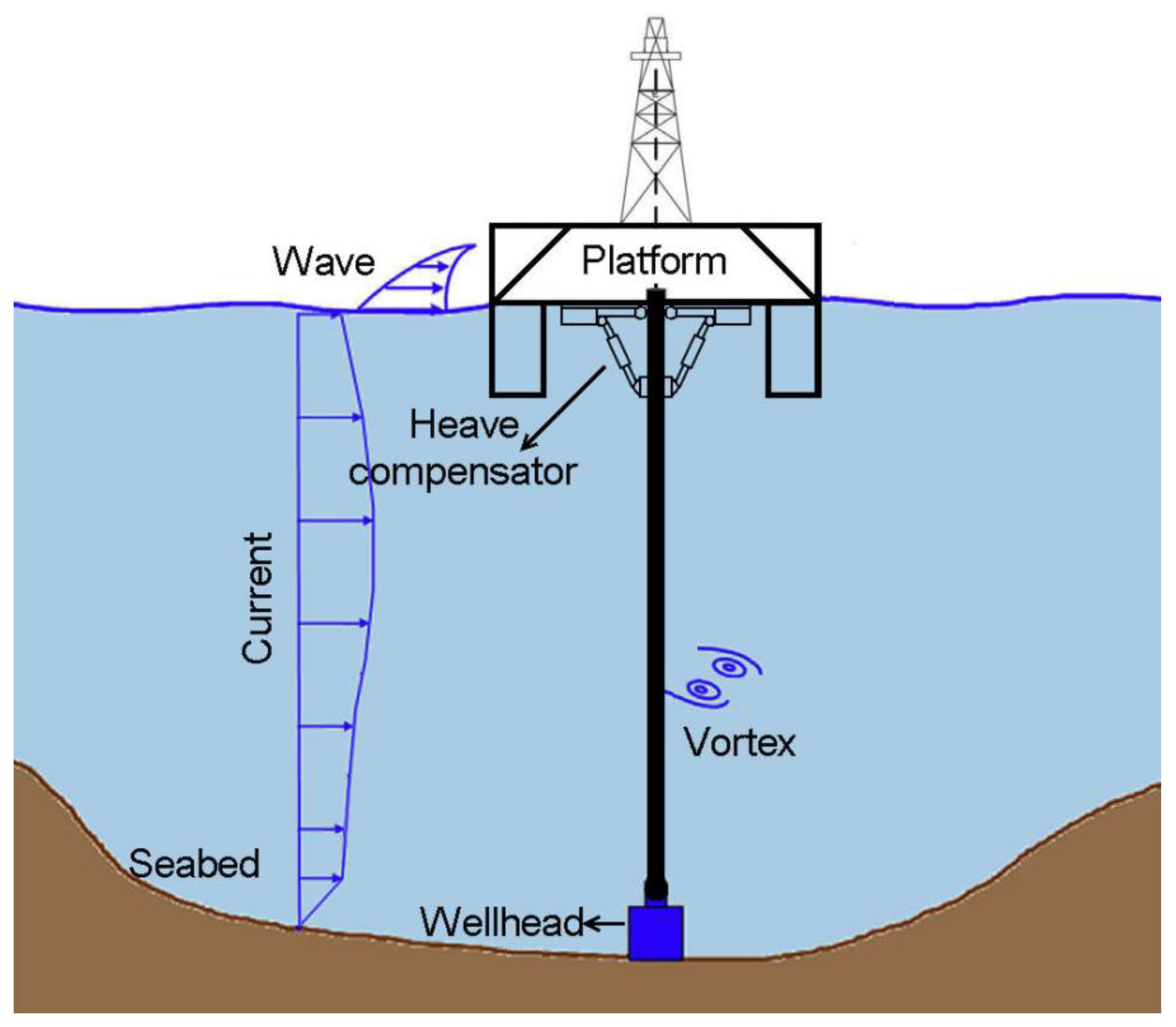
1. Introduction
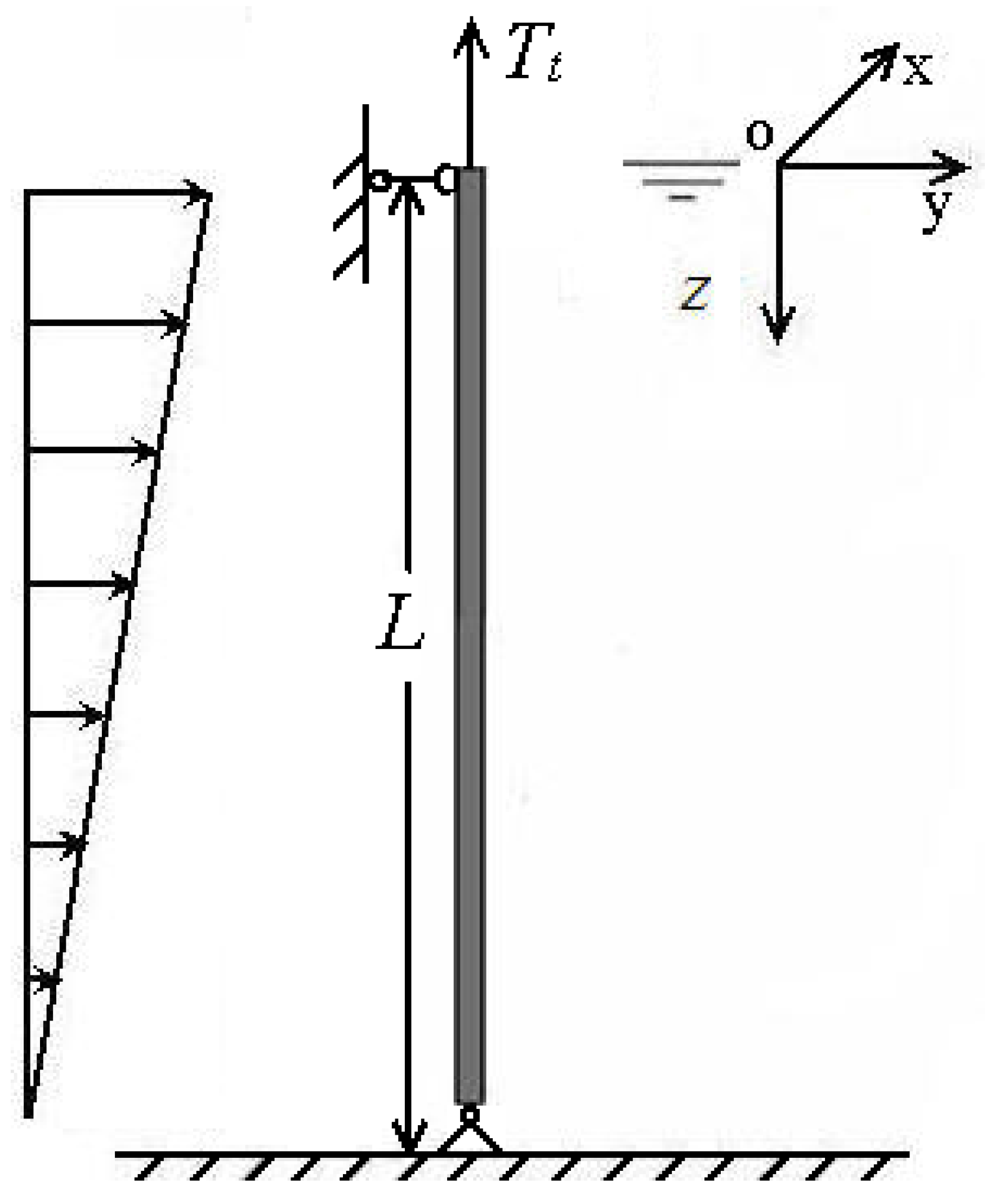
2. Governing Equations
3. Effect of Top Tension on Natural Vibration of TTR
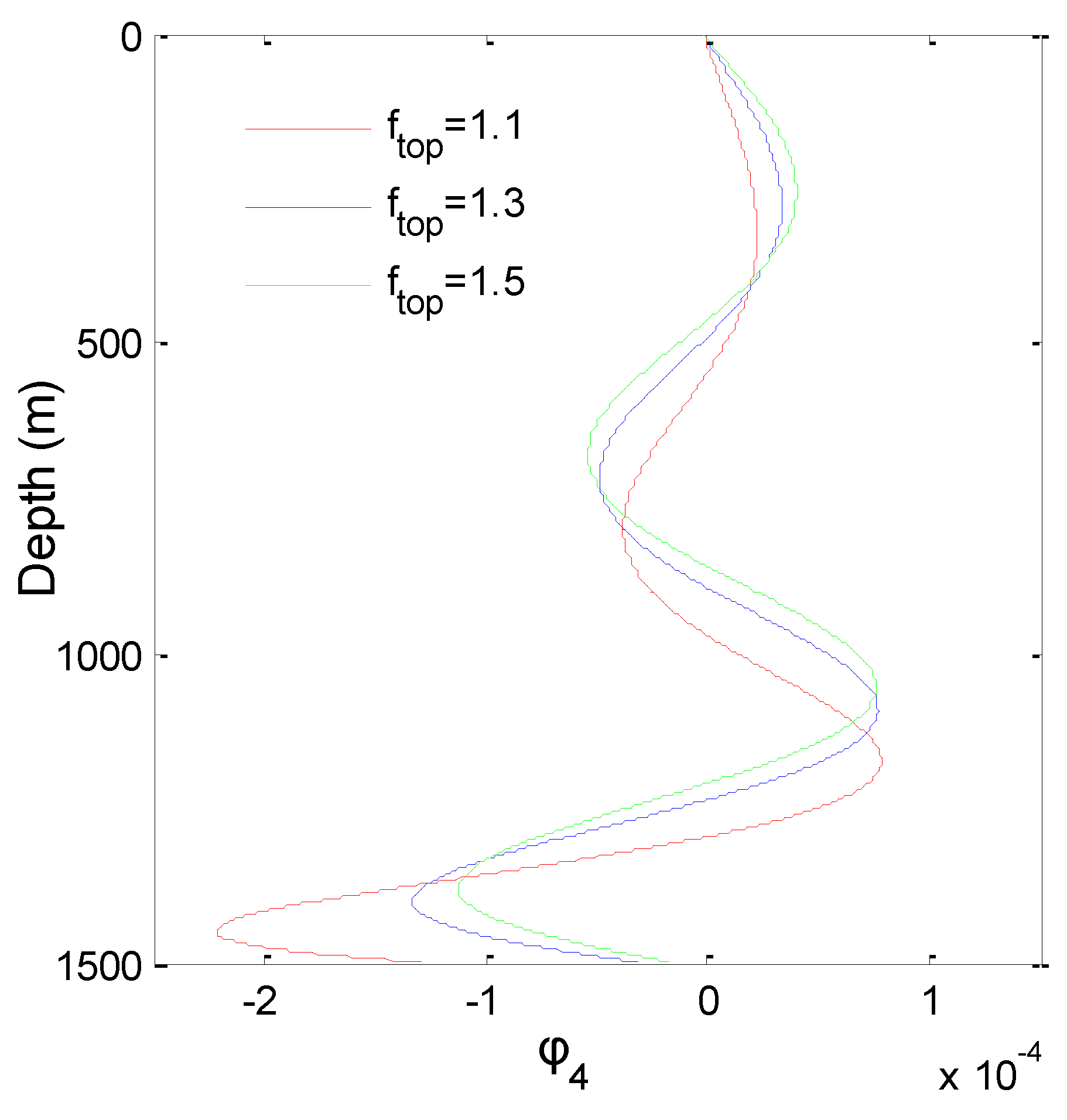
3.1. Natural Frequencies and Mode Shapes
3.2. System Parameters and Basic Calculations
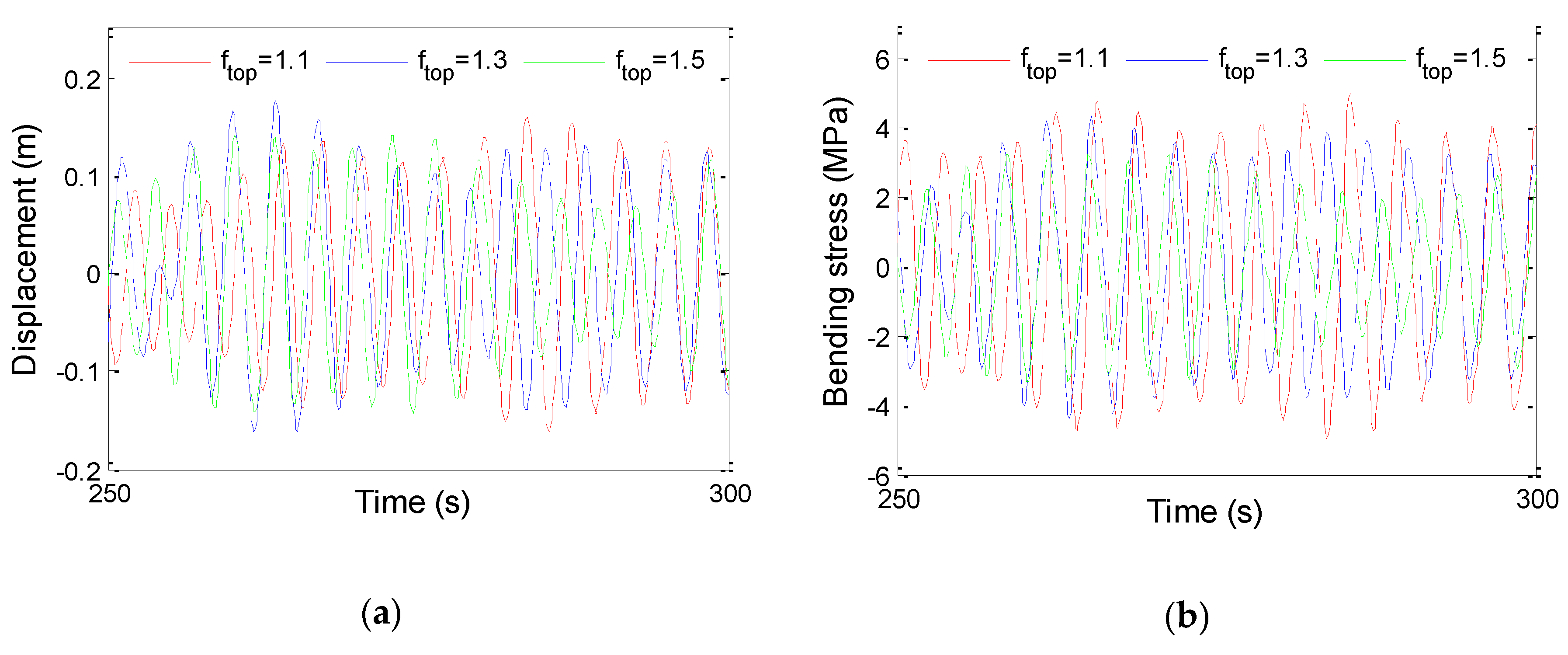
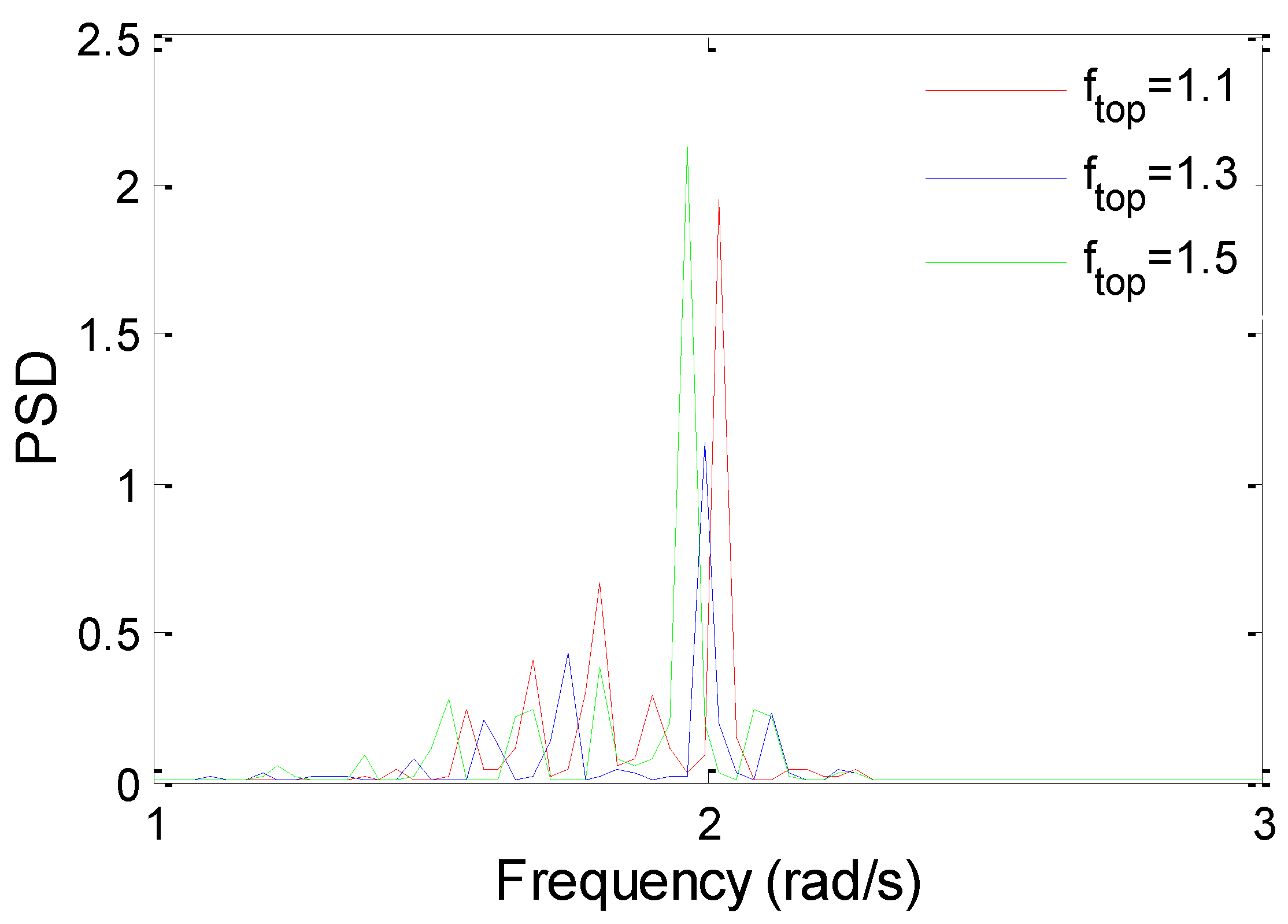
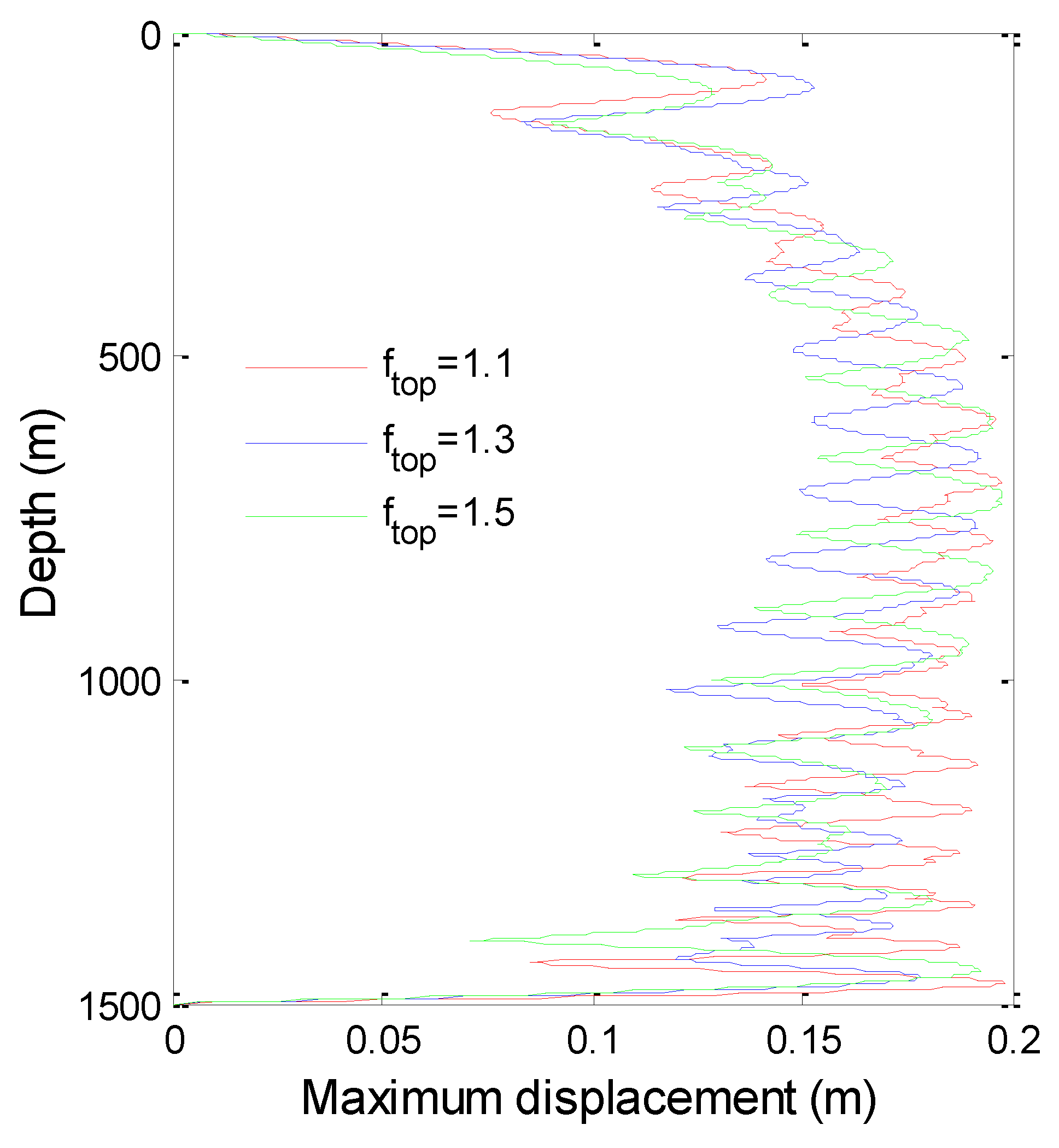
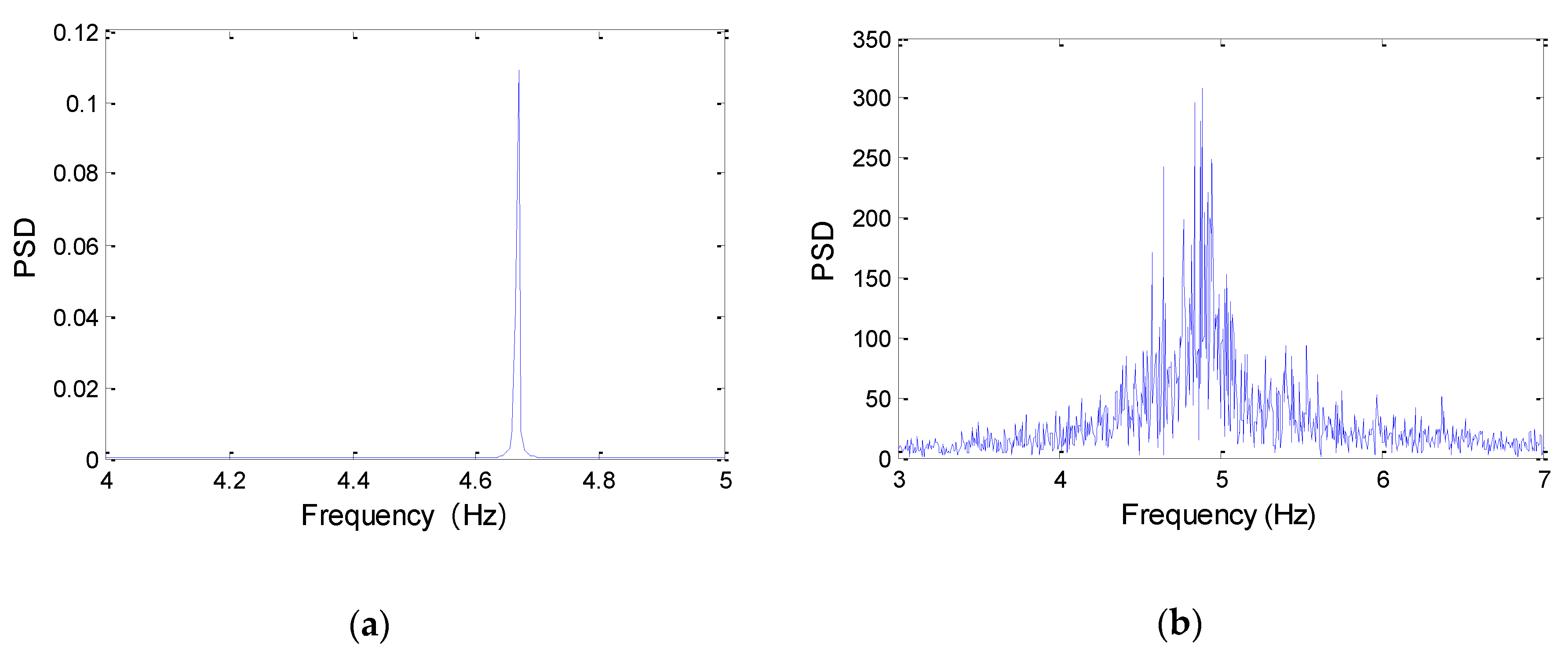
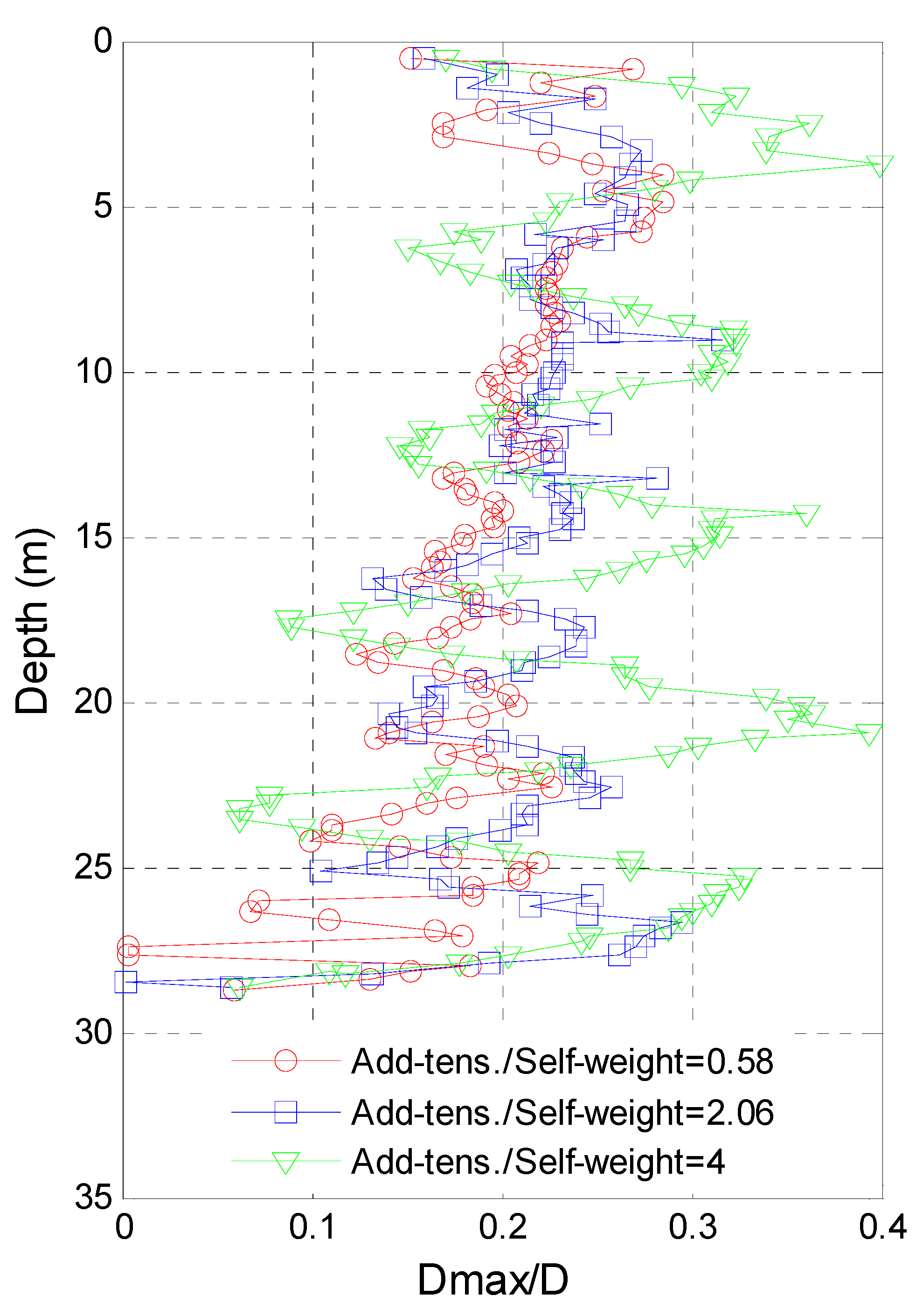
4. Effect of Top Tension on VIV of TTR
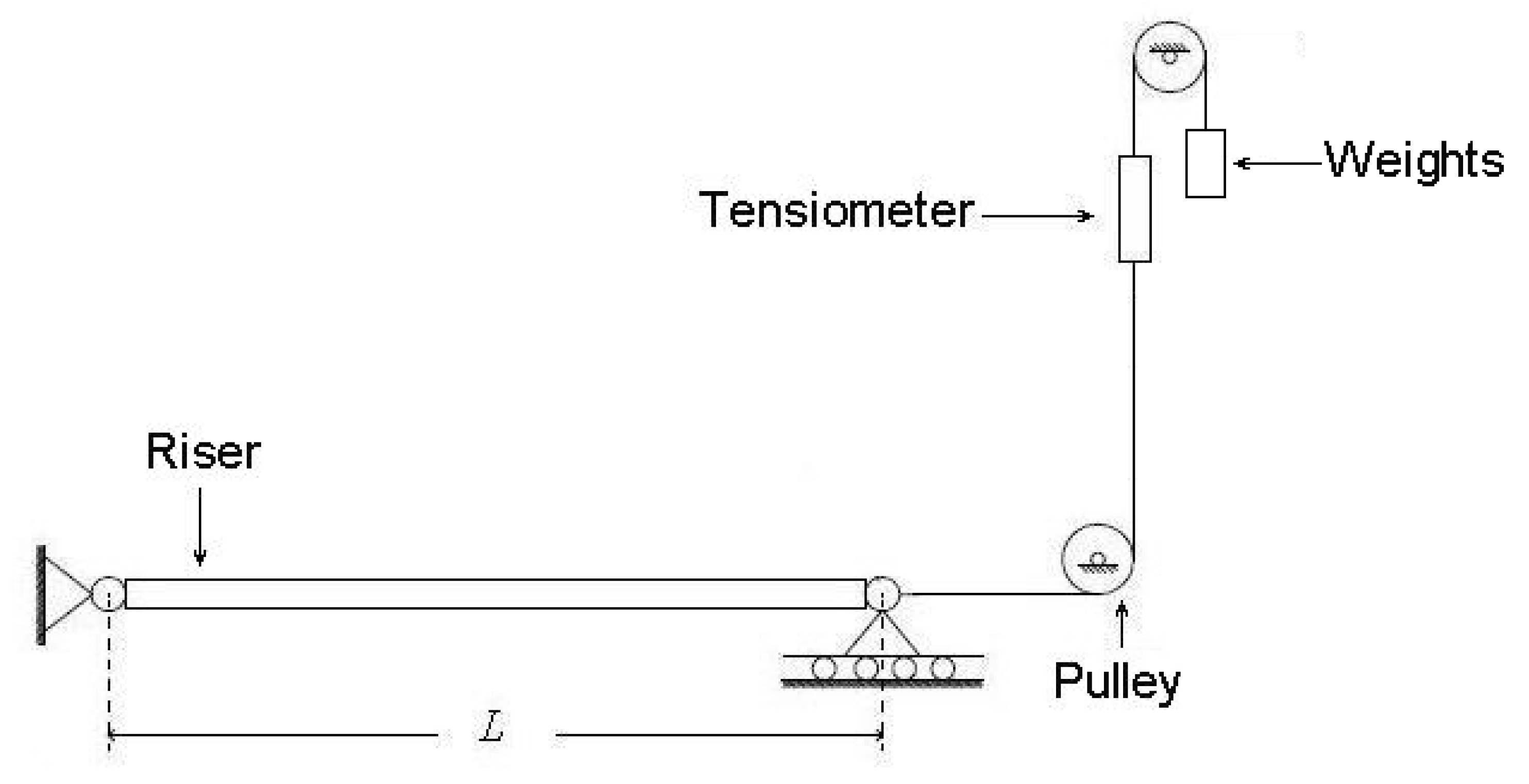
5. VIV Experiment
5.1. Test Introduction
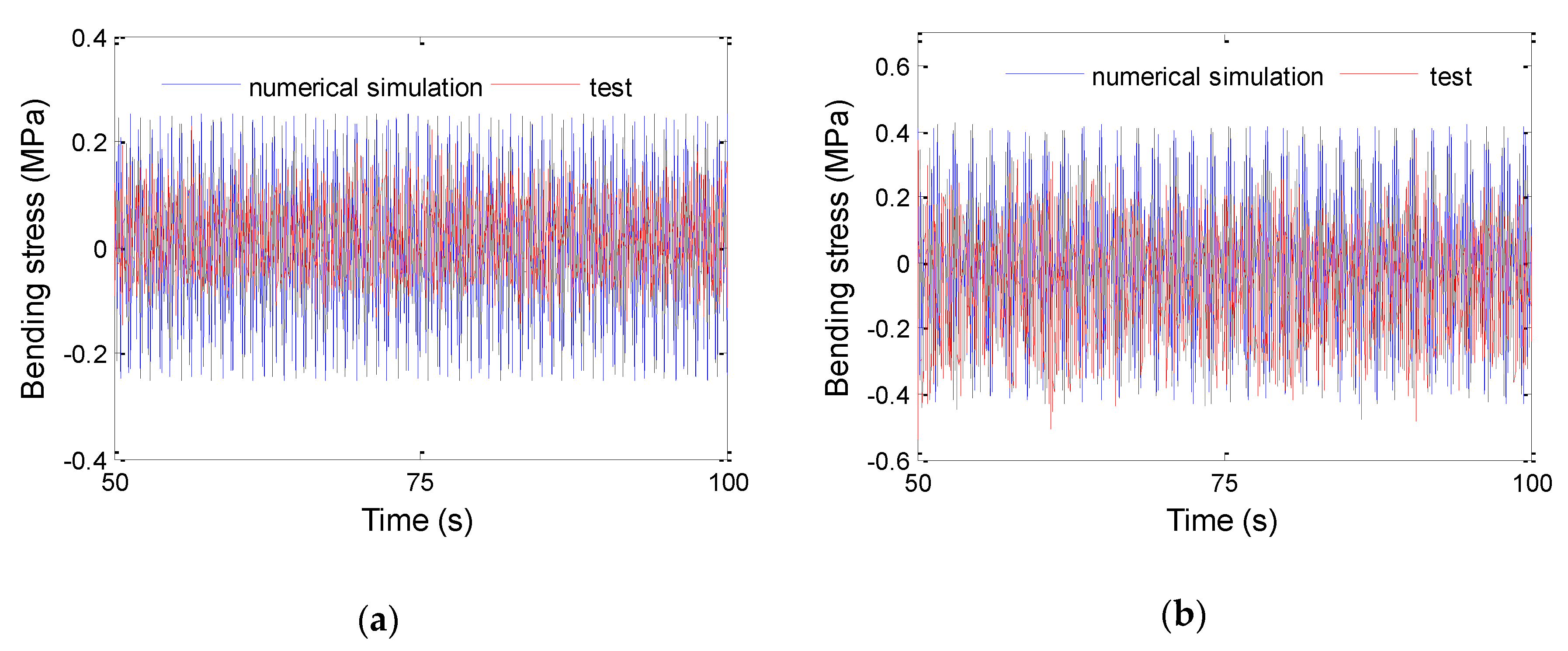
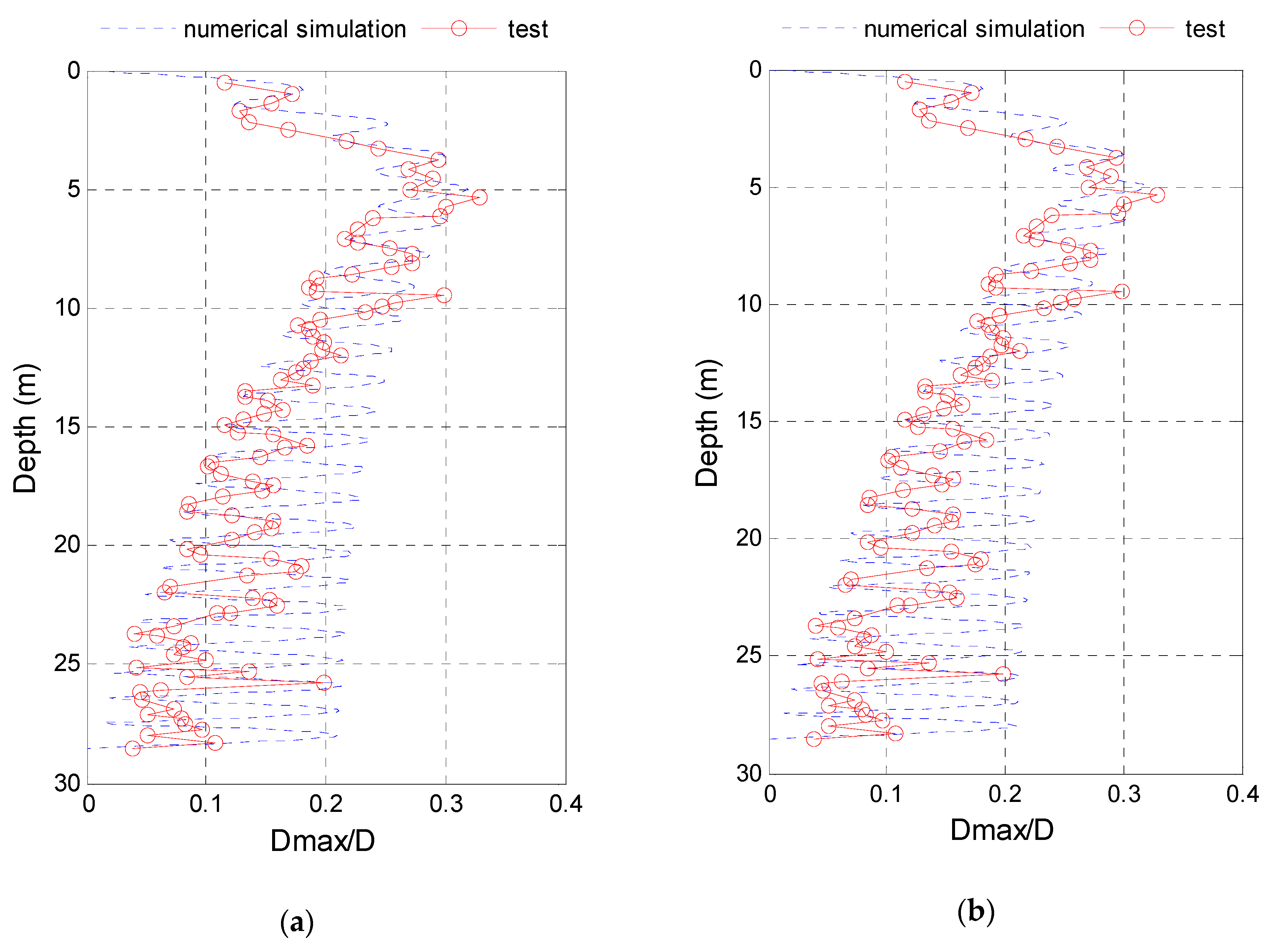
5.2. Verification for Numerical Simulation
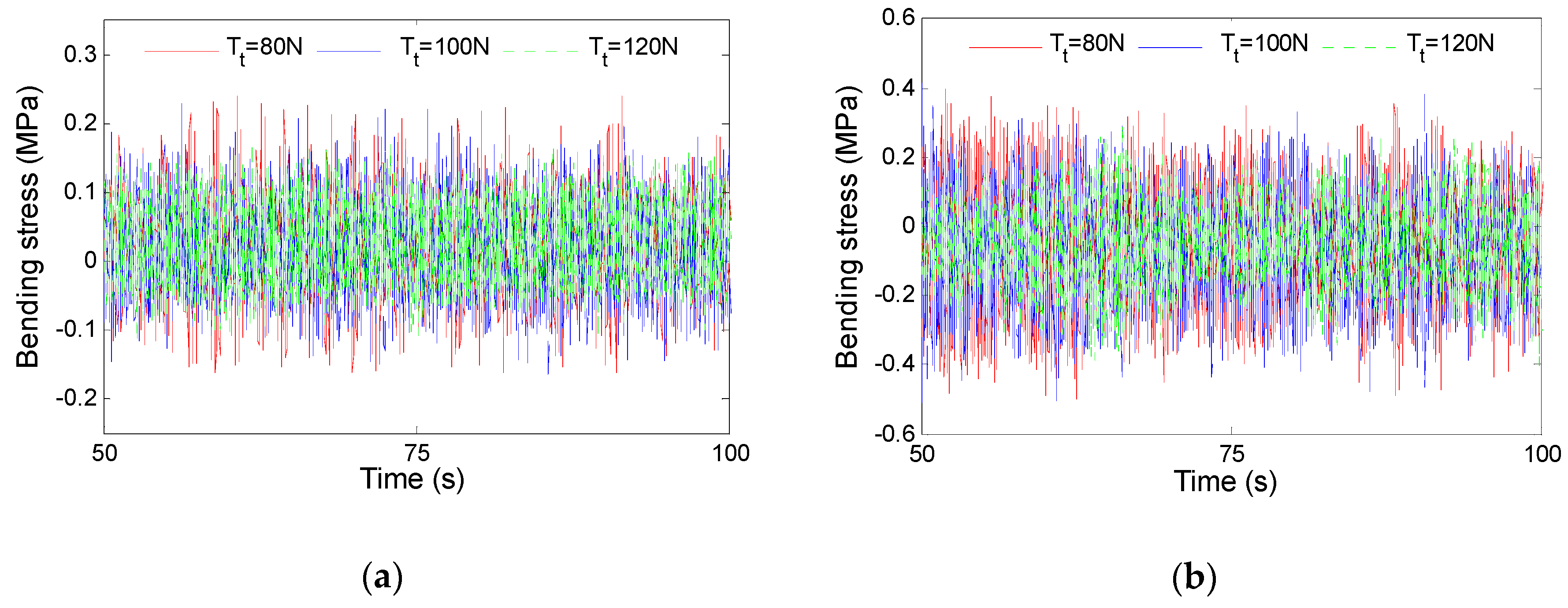
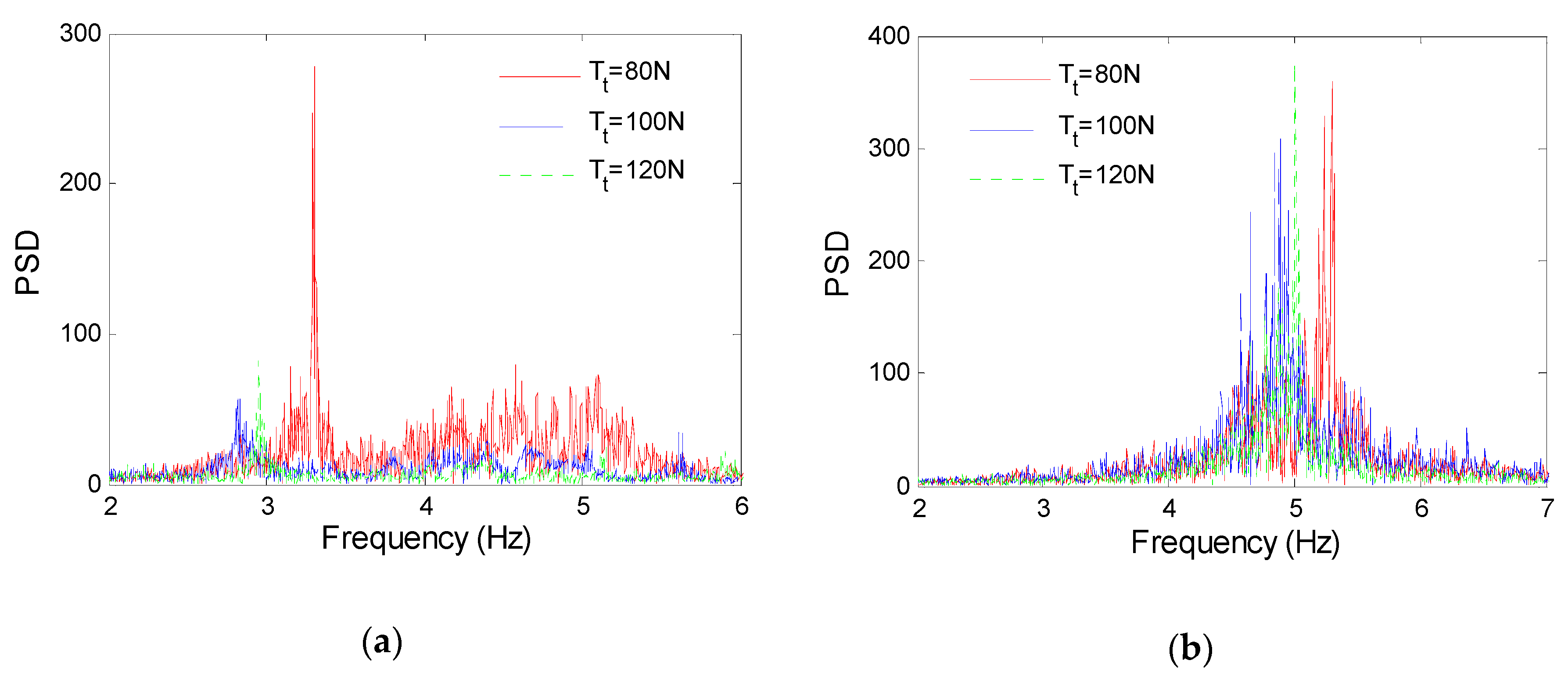
5.3. Effect of Top Tension on VIV of TTR
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Griffin, O.M.; Ramberg, S.E. Some recent studies of vortex shedding with application to marine tubulars and risers. J. Energy Res. Technol. 1982, 104, 2–13. [Google Scholar] [CrossRef]
- Gabbai, R.D.; Benaroya, H. An overview of modeling and experiments of vortex-induced vibration of circular cylinders. J. Sounds Vib. 2005, 282, 575–616. [Google Scholar] [CrossRef]
- Wu, X.D.; Ge, F.; Hong, Y.S. A review of recent studies on vortex-induced vibrations of long slender cylinders. J. Fluids Struct. 2012, 28, 292–308. [Google Scholar] [CrossRef]
- Hong, K.S.; Shah, U.H. Vortex-induced vibrations and control of marine risers: A review. Ocean Eng. 2018, 152, 300–315. [Google Scholar] [CrossRef]
- Srinil, N. Analysis and prediction of vortex-induced vibrations of variable-tension vertical risers in linearly sheared currents. Appl. Ocean Res. 2011, 33, 41–53. [Google Scholar] [CrossRef]
- Wang, E.H.; Xiao, Q. Numerical simulation of vortex-induced vibration of a vertical riser in uniform and linearly sheared currents. Ocean Eng. 2016, 121, 492–515. [Google Scholar] [CrossRef]
- Baarholm, G.S.; Larsen, C.M.; Lie, H. On fatigue damage accumulation from in-line and cross-flow vortex induced vibration on risers. J. Fluids Struct. 2006, 22, 109–127. [Google Scholar] [CrossRef]
- Bourguet, R.; Karniadakis, G.E.; Triantafyllou, M.S. Phasing mechanisms between the in-line and cross-flow vortex-induced vibrations of along tensioned beam in shear flow. Comput. Struct. 2013, 122, 155–163. [Google Scholar] [CrossRef]
- Thorsen, M.J.; Sævik, S.; Larsen, C.M. Fatigue damage from time domain simulation of combined in-line and cross-flow vortex-induced vibrations. Mar. Struct. 2015, 41, 200–222. [Google Scholar] [CrossRef]
- Yuan, Y.C.; Xue, H.X.; Tang, W.Y. An improved time domain coupled model of Cross-Flow and In-Line Vortex-Induced Vibration for flexible risers. Ocean Eng. 2017, 136, 117–128. [Google Scholar] [CrossRef]
- Feng, Y.L.; Li, S.W.; Chen, D.Y.; Xiao, Q. Predictions for combined In-Line and Cross-Flow VIV responses with a novel model for estimation of tension. Ocean Eng. 2019, 191, 106531. [Google Scholar] [CrossRef]
- Duan, J.L.; Chen, K.; You, Y.X.; Li, J.L. Numerical investigation of vortex-induced vibration of a riser with internal flow. Appl. Ocean Res. 2018, 72, 110–121. [Google Scholar] [CrossRef]
- Guo, H.Y.; Lou, M. Effect of internal flow on vortex induced vibration of risers. J. Fluids Struct. 2008, 24, 496–504. [Google Scholar] [CrossRef]
- Chen, W.M.; Li, M.; Zheng, Z.Q.; Guo, S.X.; Gan, K. Impacts of top-end vessel sway on vortex-induced vibration of the submarine riser for a floating platform in deep water. Ocean Eng. 2015, 99, 1–8. [Google Scholar] [CrossRef]
- Wang, J.G.; Xiang, S.; Fu, S.X.; Cao, P.M.; Yang, J.M.; He, J.X. Experimental investigation on the dynamic responses of a free-hanging water intake riser under vessel motion. Mar. Struct. 2016, 50, 1–19. [Google Scholar] [CrossRef]
- Yin, D.C.; Passano, E.; Lie, H.; Grytøyrb, G.; Aronsenb, K.; Tognarellic, Mi.; Kebadze, E.B. Experimental and numerical study of a top tensioned riser subjected to vessel motion. Ocean Eng. 2019, 171, 565–574. [Google Scholar] [CrossRef]
- Bai, Y.; Bai, Q. Subsea Pipelines and Risers; Elsevier: Amsterdam, The Netherlands, 2005; pp. 423–436. [Google Scholar]
- Kuiper, G.L.; Brugmans, J.; Metrikine, A.V. Destabilization of deep-water risers by a heaving platform. J. Sound Vib. 2008, 310, 541–557. [Google Scholar] [CrossRef]
- Yang, J.; Meng, W.; Yao, M.B.; Gao, D.L.; Zhou, B.; Xu, Y.J. Calculation method of riser top tension in deep water drilling. Petroleum Explor. Dev. 2015, 42, 119–122. [Google Scholar] [CrossRef]
- Moghiseh, A.; Chaloshtory, H.R.; Rahi, A. Effect of middle tension on dynamic behaviour of marine risers. J. Marit. Res. 2012, 9, 63–70. [Google Scholar]
- Fujiwara, T.; Uto, S.; Kanada, S. An Experimental Study of the Effects that Change the Vibration Mode of Riser VIV. In Proceedings of the 30th International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011. [Google Scholar]
- Le Cunff, C.; Biolley, F.; Fontaine, E.; Etienne, S.; Facchinetti, M.L. Vortex-induced vibrations of risers: Theoretical, numerical and experimental investigation. Oil Gas Sci. Technol. 2002, 57, 59–69. [Google Scholar] [CrossRef]
- Facchinetti, M.L.; Langre, E.D.; Biolley, F. Coupling of structure and wake oscillators in vortex-induced vibrations. J. Fluids Struct. 2004, 19, 123–140. [Google Scholar] [CrossRef]
- Senjanovic, I.; Ljustina, A.M.; Parunov, J. Natural vibration analysis of tensioned risers by segmentation method. Oil Gas Sci. Technol. 2006, 61, 647–659. [Google Scholar] [CrossRef]
- Zhang, J.; Tang, Y.G. Further analysis on natural vibration of deep-water risers. J. Ship Mech. 2014, 18, 165–171. (In Chinese) [Google Scholar]
- Basil, T.P. Numerical Simulation of the Truss Spar ‘Horn Moutain’ Using Couple. Master’s Thesis, Texas A&M University, College Station, TX, USA, May 2006. [Google Scholar]
- Gao, Y.; Zong, Z.; Sun, L. Numerical prediction of fatigue damage in steel catenary riser due to vortex-induced vibration. J. Hydrodyn. 2011, 23, 154–163. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Property | Symbol | Value | Unit |
|---|---|---|---|---|
| 1 | Riser length | 1500 | m | |
| 2 | Outer diameter | 0.3048 | m | |
| 3 | Wall thickness | 0.0136 | m | |
| 4 | Young’s modulus | 2.1E11 | Pa | |
| 5 | Density of steel | 7850 | kg/m3 | |
| 6 | Density of seawater | 1025 | kg/m3 | |
| 7 | Density of internal fluid | 800 | kg/m3 | |
| 8 | Added mass coefficient | 1.0 | - | |
| 9 | Drag coefficient | 1.0 | - |
| 0.1075 | 0.2149 | 0.3224 | 0.4298 | 0.5373 | |
| 0.1329 | 0.2658 | 0.3986 | 0.5315 | 0.6644 | |
| 0.1521 | 0.3042 | 0.4563 | 0.6083 | 0.7604 |
| No. | Property | Value | Unit |
|---|---|---|---|
| 1 | Length | 5 | m |
| 2 | Outer diameter | 0.016 | m |
| 3 | Wall thickness | 0.001 | m |
| 4 | Young’s modulus | 7.38 × 108 | Pa |
| 5 | Material | Teflon | - |
| 6 | Density of Teflon | 2178 | kg/m3 |
| 7 | Density of seawater | 1000 | kg/m3 |
| 8 | Density of internal fluid | 1000 | kg/m3 |
| No. | Current Velocity (U) | |
|---|---|---|
| 1 | 0.3 m/s | 80 N |
| 2 | 0.3 m/s | 100 N |
| 3 | 0.3 m/s | 120 N |
| 4 | 0.5 m/s | 80 N |
| 5 | 0.5 m/s | 100 N |
| 6 | 0.5 m/s | 120 N |
| T = 80 N | 1.3273 | 2.6738 | 4.0579 | 5.4976 | 7.0093 |
| T = 100 N | 1.4858 | 2.9887 | 4.5253 | 6.1119 | 7.7637 |
| T = 120 N | 1.6198 | 3.2552 | 4.9217 | 6.6342 | 8.4069 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Guo, H.; Tang, Y.; Li, Y. Effect of Top Tension on Vortex-Induced Vibration of Deep-Sea Risers. J. Mar. Sci. Eng. 2020, 8, 121. https://doi.org/10.3390/jmse8020121
Zhang J, Guo H, Tang Y, Li Y. Effect of Top Tension on Vortex-Induced Vibration of Deep-Sea Risers. Journal of Marine Science and Engineering. 2020; 8(2):121. https://doi.org/10.3390/jmse8020121
Chicago/Turabian StyleZhang, Jie, He Guo, Yougang Tang, and Yulong Li. 2020. "Effect of Top Tension on Vortex-Induced Vibration of Deep-Sea Risers" Journal of Marine Science and Engineering 8, no. 2: 121. https://doi.org/10.3390/jmse8020121
APA StyleZhang, J., Guo, H., Tang, Y., & Li, Y. (2020). Effect of Top Tension on Vortex-Induced Vibration of Deep-Sea Risers. Journal of Marine Science and Engineering, 8(2), 121. https://doi.org/10.3390/jmse8020121