An Approach for Diver Passive Detection Based on the Established Model of Breathing Sound Emission



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
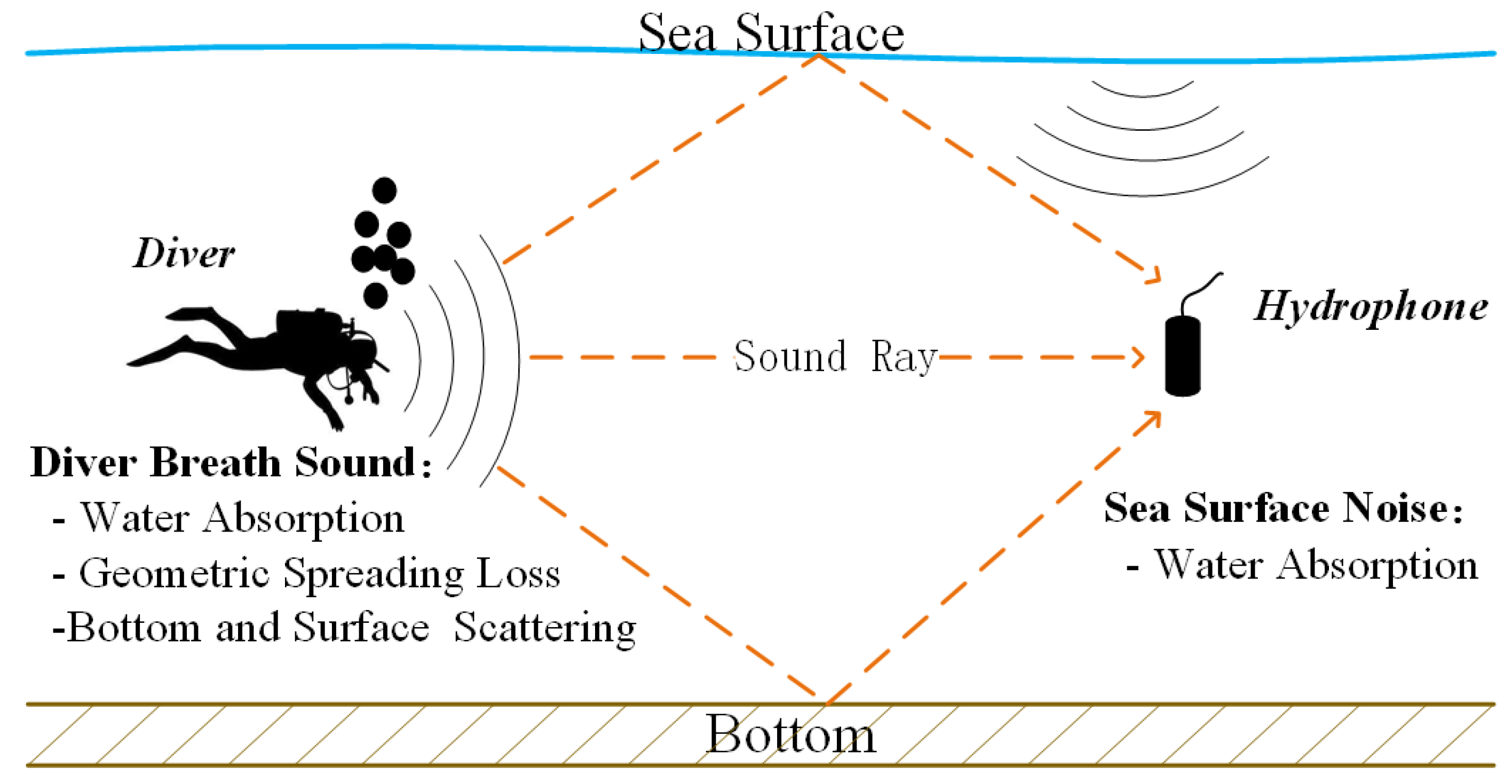
2. Underwater Acoustic Channel Model
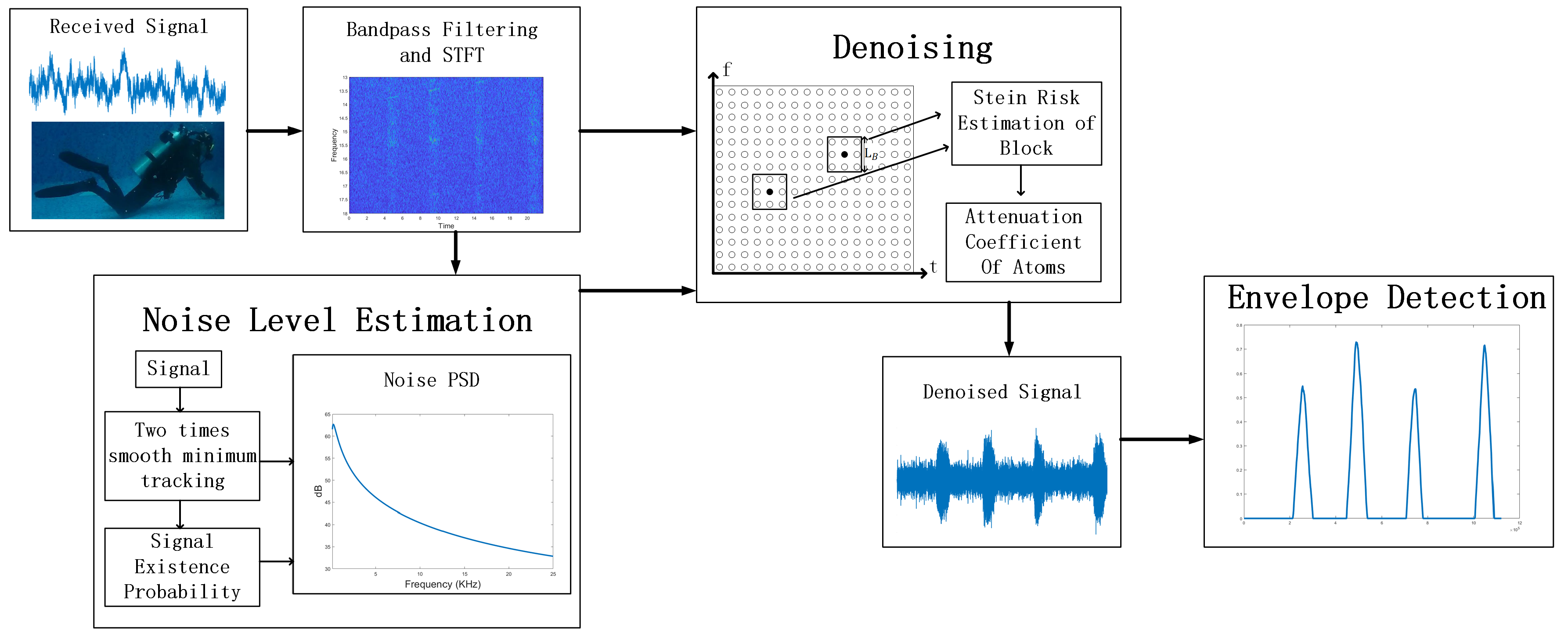
3. Noise Reduction and Detection Methodology
3.1. Noise Reduction
3.2. Noise Level Estimation
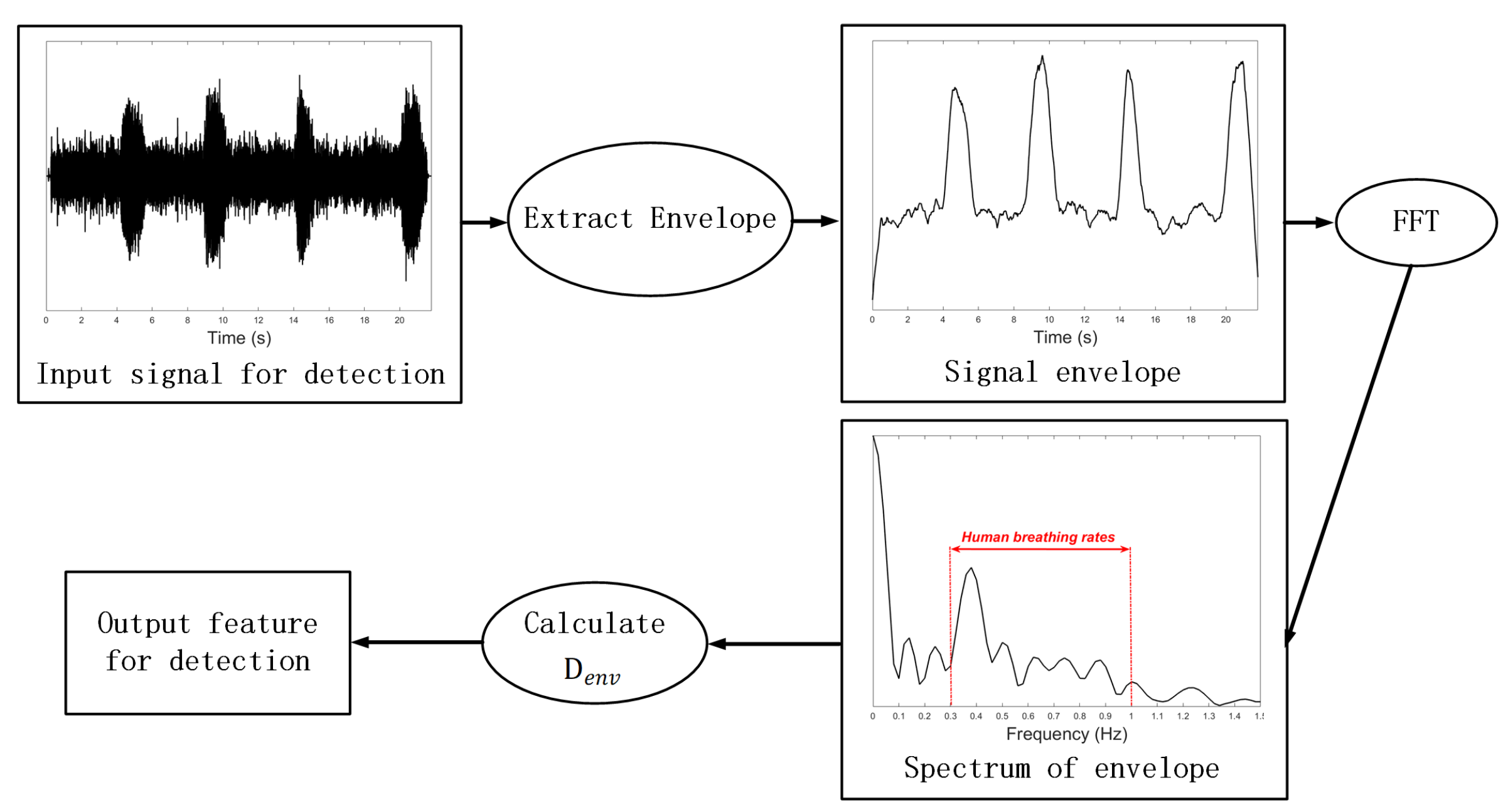
3.3. Detection Method
| Algorithm 1 Diver detection algorithm BIED based on BT and IMCRA. |
Input: Observed signal |
|
Output: Probability of the diver’s presence. |
4. Data and Analysis
5. Results and Analysis
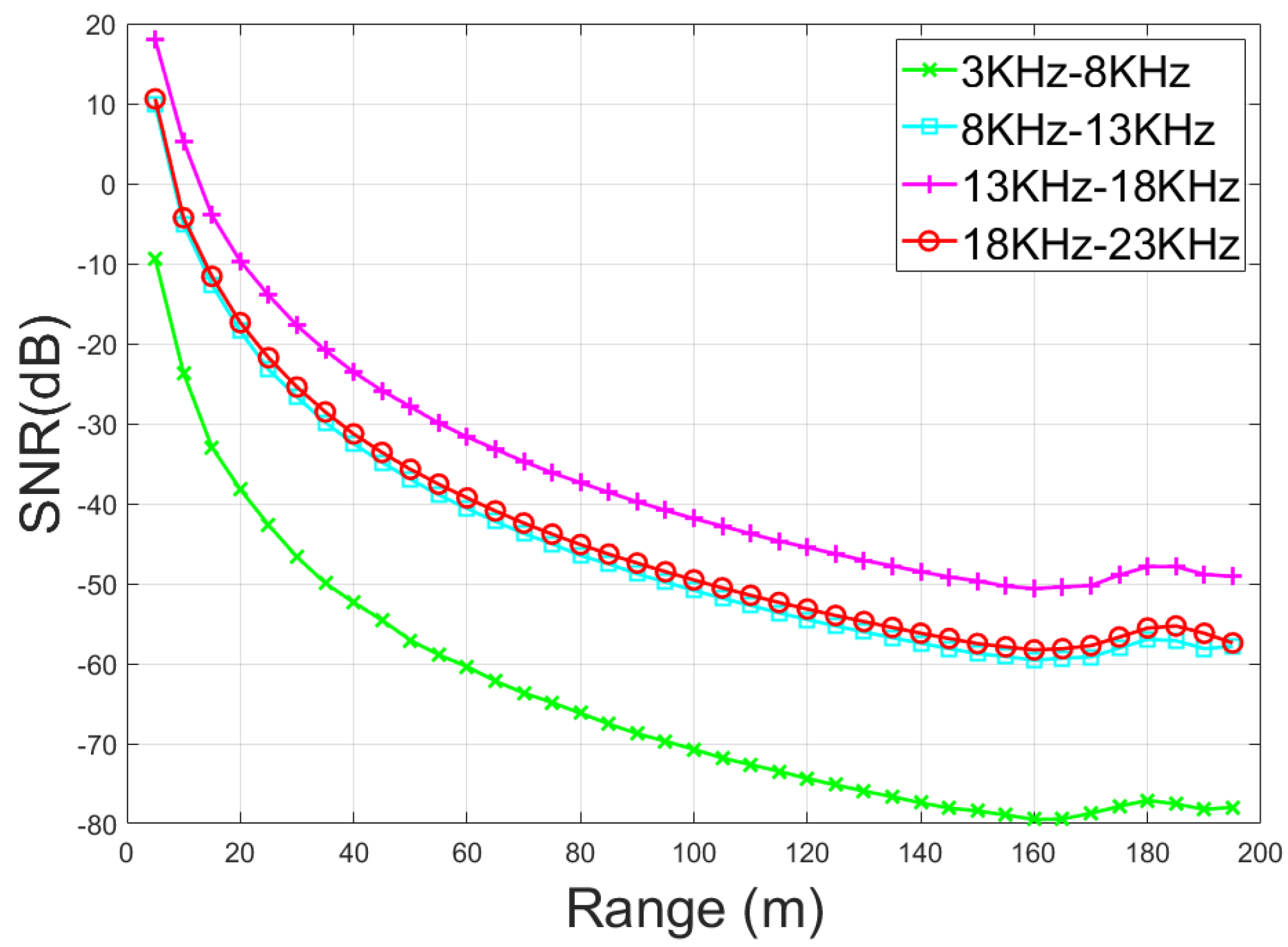
5.1. Impacts of Underwater Environment
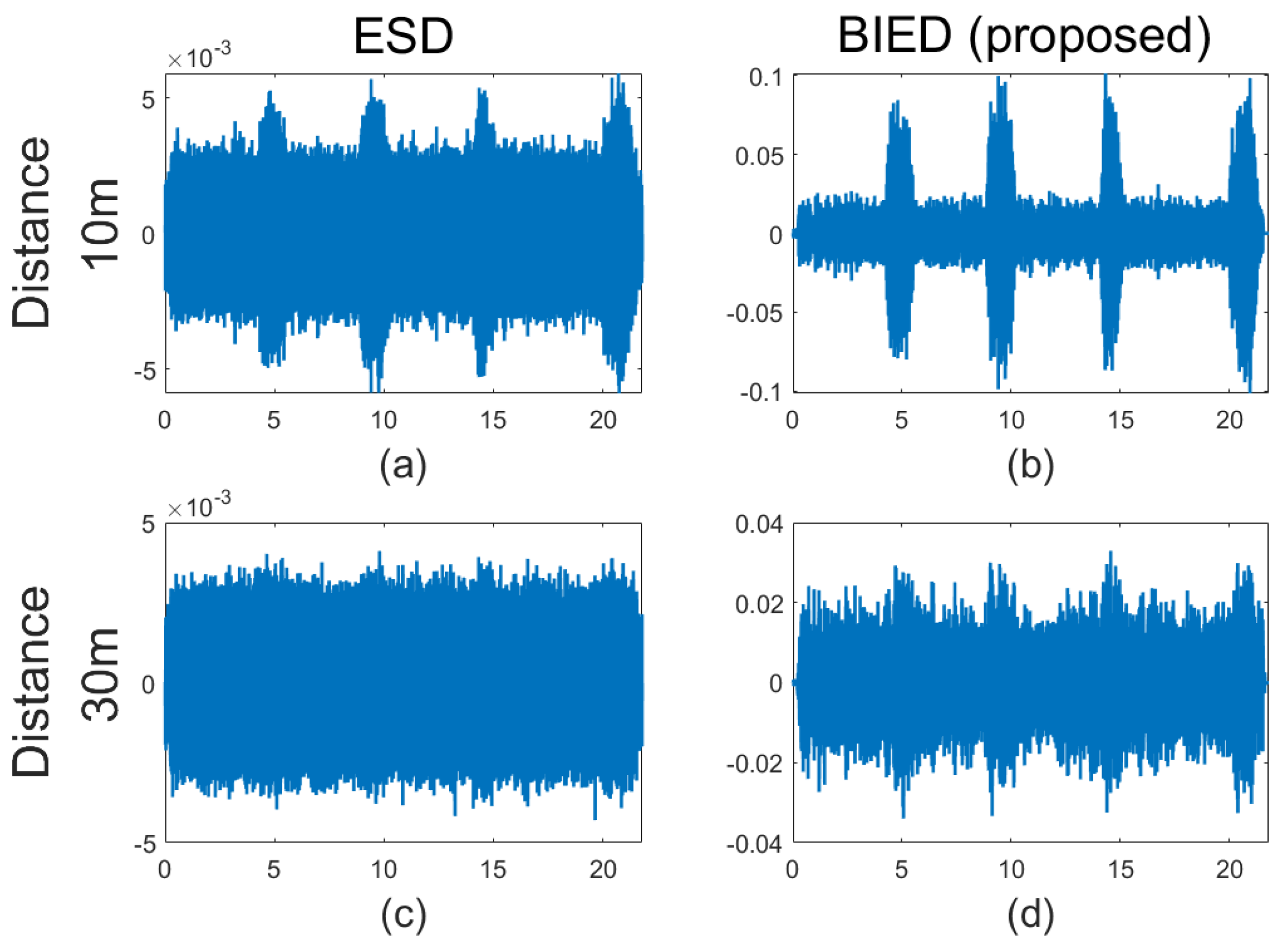
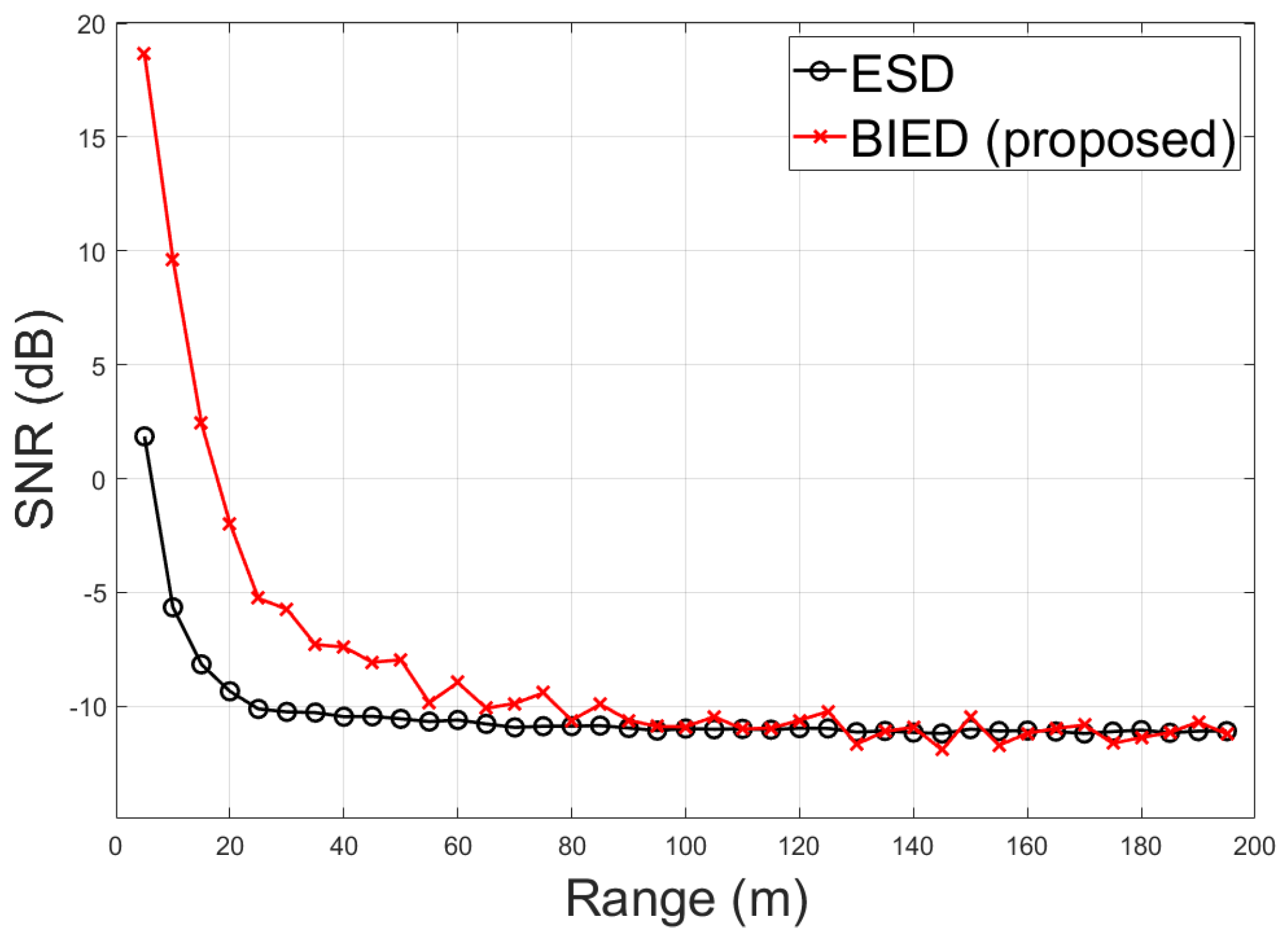
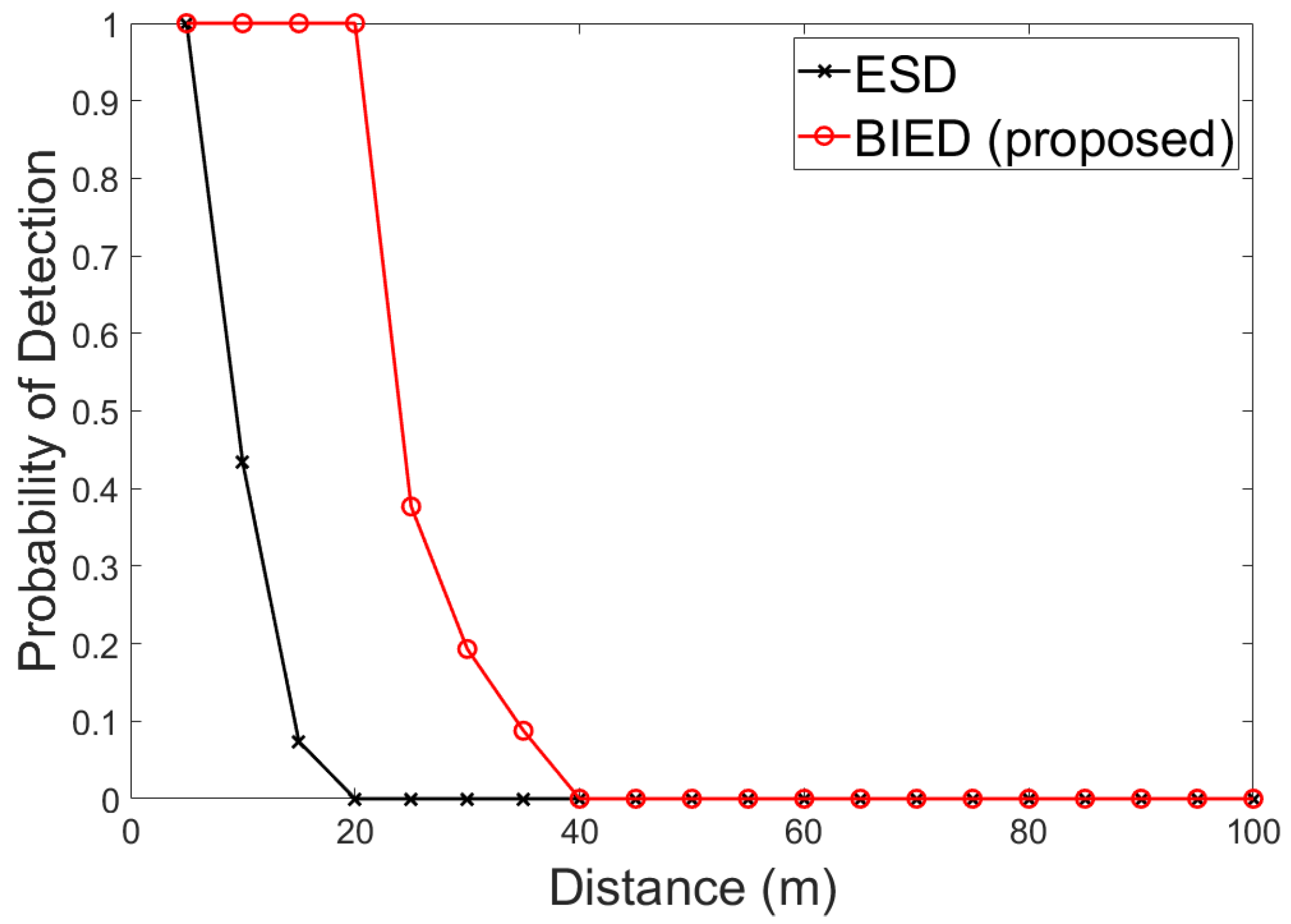
5.2. Detection System Performance
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lennartsson, R.; Dalberg, E.; Johansson, A.; Persson, L.; Petrović, S.; Rabe, E. Fused passive acoustic and electric detection of divers. In Proceedings of the IEEE 2010 International WaterSide Security Conference, Carrara, Italy, 3–5 November 2010; pp. 1–8. [Google Scholar]
- Stolkin, R.; Sutin, A.; Radhakrishnan, S.; Bruno, M.; Fullerton, B.; Ekimov, A.; Raftery, M. Feature based passive acoustic detection of underwater threats. In Photonics for Port and Harbor Security II; International Society for Optics and Photonics, Defense and Security Symposium: Orlando, FL, USA, 2006; Volume 6204, p. 620408. [Google Scholar]
- Stolkin, R.; Florescu, I. Probabilistic analysis of a passive acoustic diver detection system for optimal sensor placement and extensions to localization and tracking. In Proceedings of the OCEANS 2007 MTS/IEEE, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–6. [Google Scholar]
- Donskoy, D.M.; Sedunov, N.A.; Sedunov, A.N.; Tsionskiy, M.A. Variability of SCUBA diver’s acoustic emission. In Optics and Photonics in Global Homeland Security IV; International Society for Optics and Photonics, Defense and Security Symposium: Orlando, FL, USA, 2008; Volume 6945, p. 694515. [Google Scholar]
- Harris, A.F., III; Zorzi, M. Modeling the underwater acoustic channel in ns2. In Proceedings of the 2nd International Conference on Performance Evaluation Methodologies and Tools, Nantes, France, 22–27 October 2007; p. 18. [Google Scholar]
- Johansson, A.; Lennartsson, R.; Nolander, E.; Petrovic, S. Improved passive acoustic detection of divers in harbor environments using pre-whitening. In Proceedings of the OCEANS 2010 MTS/IEEE, Seattle, WA, USA, 20–23 September 2010; pp. 1–6. [Google Scholar]
- Hari, V.N.; Chitre, M.; Too, Y.M.; Pallayil, V. Robust passive diver detection in shallow ocean. In Proceedings of the OCEANS 2015 MTS/IEEE, Genoa, Italy, 18–21 May 2015; pp. 1–6. [Google Scholar]
- Pizzuti, L.; dos Santos Guimarães, C.; Iocca, E.G.; de Carvalho, P.H.S.; Martins, C.A. Continuous analysis of the acoustic marine noise: A graphic language approach. Ocean Eng. 2012, 49, 56–65. [Google Scholar] [CrossRef]
- Hildebrand, J.A. Anthropogenic and natural sources of ambient noise in the ocean. Mar. Ecol. Prog. Ser. 2009, 395, 5–20. [Google Scholar] [CrossRef]
- Van Walree, P. Channel Sounding for Acoustic Communications: Techniques and Shallow-Water Examples; Norwegian Defence Research Establishment (FFI), Technical Report FFI-Rapport; FFI: Kjeller, Norway, 2011; Volume 7. [Google Scholar]
- Martin, R. Noise power spectral density estimation based on optimal smoothing and minimum statistics. IEEE Trans. Speech Audio Process. 2001, 9, 504–512. [Google Scholar] [CrossRef]
- Cohen, I.; Berdugo, B. Noise estimation by minima controlled recursive averaging for robust speech enhancement. IEEE Signal Process. Lett. 2002, 9, 12–15. [Google Scholar] [CrossRef]
- Cohen, I. Noise spectrum estimation in adverse environments: Improved minima controlled recursive averaging. IEEE Trans. Speech Audio Process. 2003, 11, 466–475. [Google Scholar] [CrossRef]
- Hendriks, R.C.; Jensen, J.; Heusdens, R. Noise tracking using DFT domain subspace decompositions. IEEE Trans. Audio Speech Lang. Process. 2008, 16, 541–553. [Google Scholar] [CrossRef]
- Taghia, J.; Taghia, J.; Mohammadiha, N.; Sang, J.; Bouse, V.; Martin, R. An evaluation of noise power spectral density estimation algorithms in adverse acoustic environments. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 4640–4643. [Google Scholar]
- Yu, G.; Mallat, S.; Bacry, E. Audio Denoising by Time-Frequency Block Thresholding. IEEE Trans. Signal Process. 2008, 56, 1830–1839. [Google Scholar] [CrossRef]
- Courmontagne, P. The stochastic matched filter and its applications to detection and de-noising. In Stochastic Control; IntechOpen: London, UK, 2010. [Google Scholar]
- Yu, D.; Deng, L.; Droppo, J.; Wu, J.; Gong, Y.; Acero, A. Robust speech recognition using a cepstral minimum-mean-square-error-motivated noise suppressor. IEEE Trans. Audio Speech Lang. Process. 2008, 16, 1061–1070. [Google Scholar]
- Hu, Y.; Loizou, P.C. Speech enhancement based on wavelet thresholding the multitaper spectrum. IEEE Trans. Speech Audio Process. 2004, 12, 59–67. [Google Scholar] [CrossRef]
- Moreaud, U.; Courmontagne, P.; Chaillan, F.; Mesquida, J.R. Performance assessment of noise reduction methods applied to underwater acoustic signals. In Proceedings of the OCEANS 2016 MTS/IEEE, Monterey, CA, USA, 19–23 September 2016; pp. 1–15. [Google Scholar]
- Stein, M.C. Estimation of the Mean of a Multivariate Normal Distribution. Ann. Stat. 1981, 9, 1135–1151. [Google Scholar] [CrossRef]
- Cai, T.T.; Zhou, H.H. A data-driven block thresholding approach to wavelet estimation. Ann. Stat. 2009, 37, 569–595. [Google Scholar] [CrossRef]
- Li, D.Q.; Hallander, J.; Johansson, T. Predicting underwater radiated noise of a full scale ship with model testing and numerical methods. Ocean Eng. 2018, 161, 121–135. [Google Scholar] [CrossRef]
- Coates, R.F. Underwater Acoustic Systems; Macmillan International Higher Education: London, UK, 1990. [Google Scholar]
- Asolkar, P.; Das, A.; Gajre, S.; Joshi, Y. Comprehensive correlation of ocean ambient noise with sea surface parameters. Ocean Eng. 2017, 138, 170–178. [Google Scholar] [CrossRef]
- Li, J.; White, P.R.; Bull, J.M.; Leighton, T.G. A noise impact assessment model for passive acoustic measurements of seabed gas fluxes. Ocean Eng. 2019, 183, 294–304. [Google Scholar] [CrossRef]
- Porter, M.B. The Bellhop Manual and User’S Guide: Preliminary Draft; Technical Report; Heat, Light, and Sound Research, Inc.: La Jolla, CA, USA, 2011. [Google Scholar]












© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tu, Q.; Yuan, F.; Yang, W.; Cheng, E. An Approach for Diver Passive Detection Based on the Established Model of Breathing Sound Emission. J. Mar. Sci. Eng. 2020, 8, 44. https://doi.org/10.3390/jmse8010044
Tu Q, Yuan F, Yang W, Cheng E. An Approach for Diver Passive Detection Based on the Established Model of Breathing Sound Emission. Journal of Marine Science and Engineering. 2020; 8(1):44. https://doi.org/10.3390/jmse8010044
Chicago/Turabian StyleTu, Qiang, Fei Yuan, Weidi Yang, and En Cheng. 2020. "An Approach for Diver Passive Detection Based on the Established Model of Breathing Sound Emission" Journal of Marine Science and Engineering 8, no. 1: 44. https://doi.org/10.3390/jmse8010044
APA StyleTu, Q., Yuan, F., Yang, W., & Cheng, E. (2020). An Approach for Diver Passive Detection Based on the Established Model of Breathing Sound Emission. Journal of Marine Science and Engineering, 8(1), 44. https://doi.org/10.3390/jmse8010044