Test-Bed Performance of an Ice-Coring Drill Used with a Hot Water Drilling System

Abstract
1. Introduction
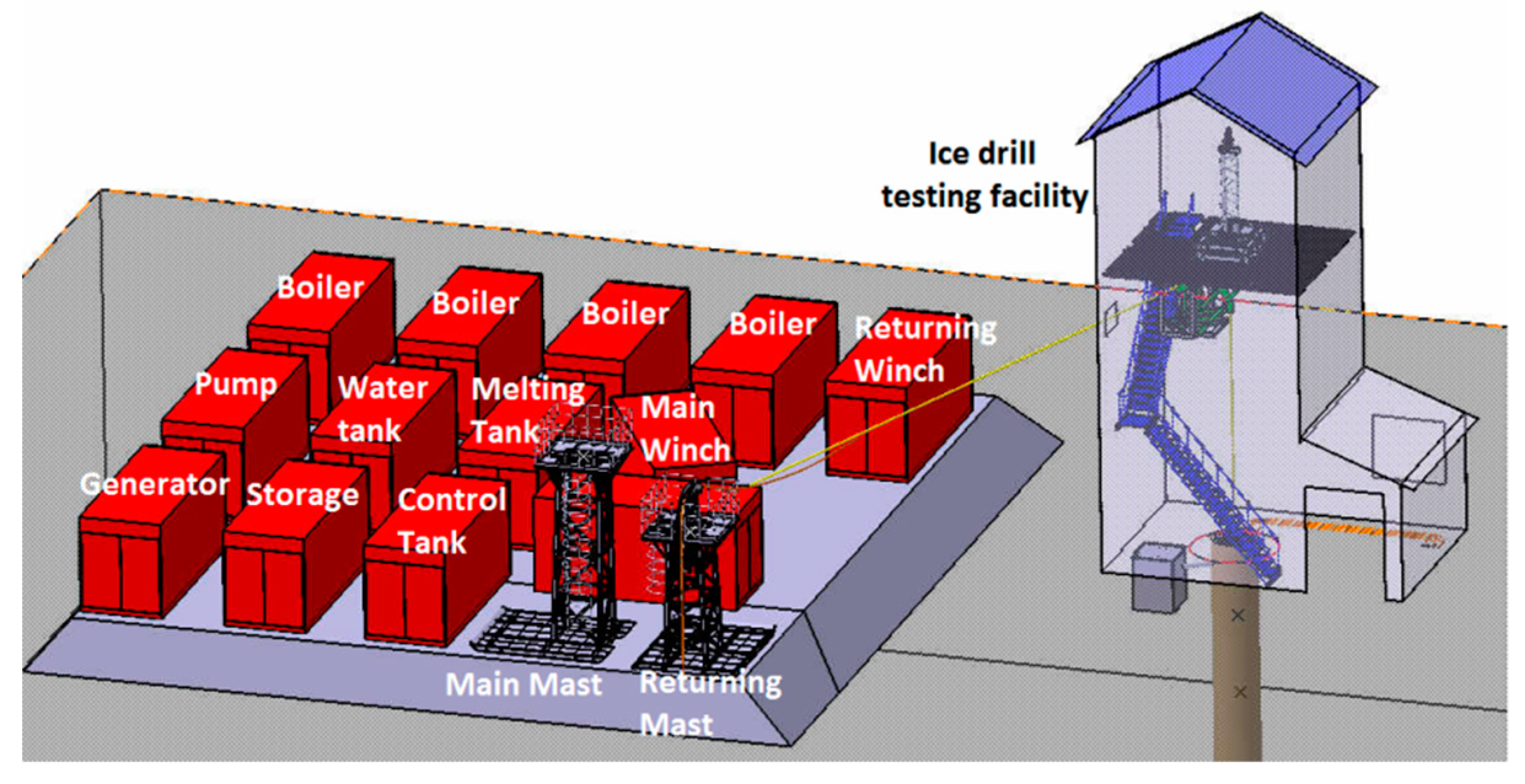
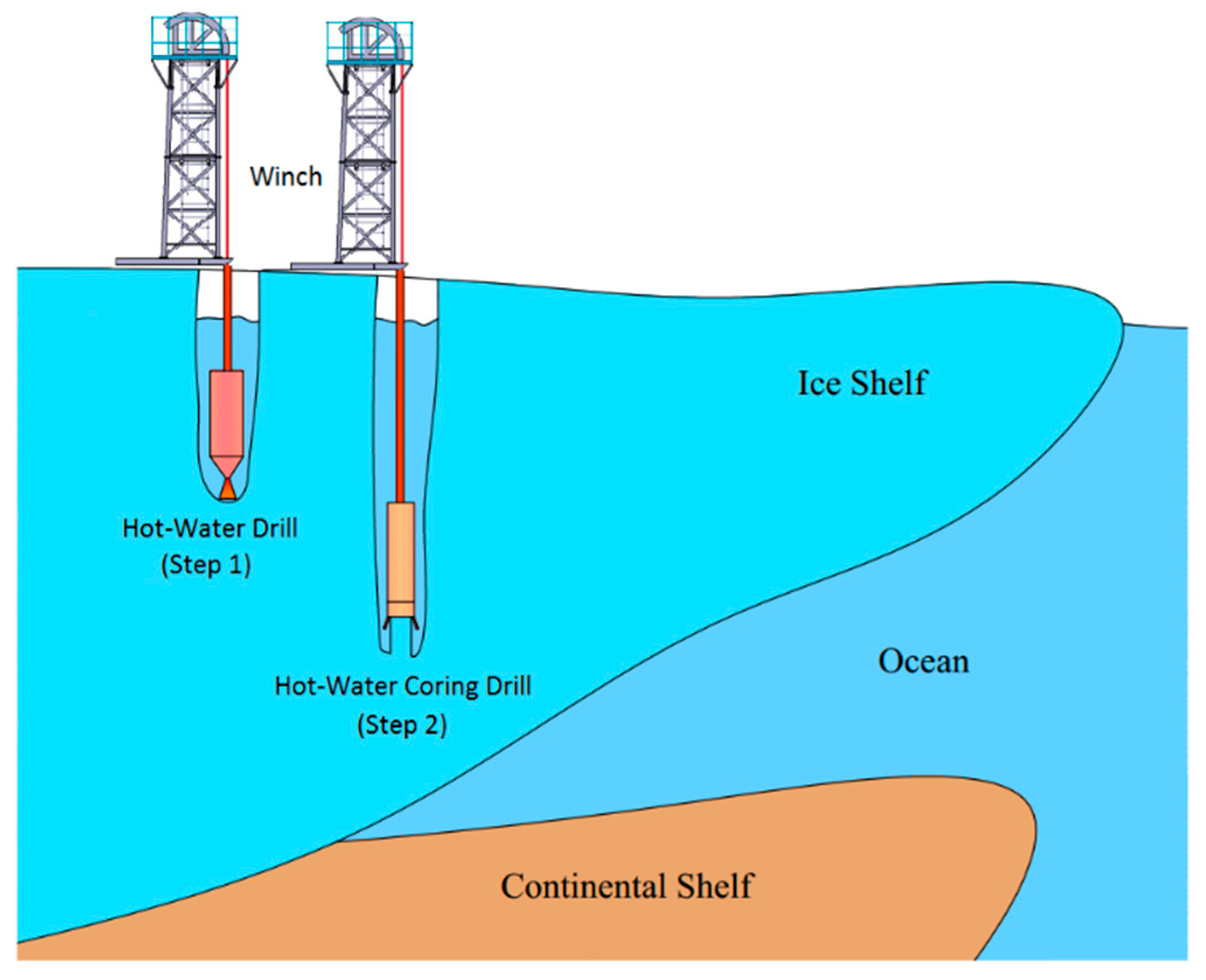
2. General View of Chinese Hot Water Drilling Engineering on Amery Ice Shelf
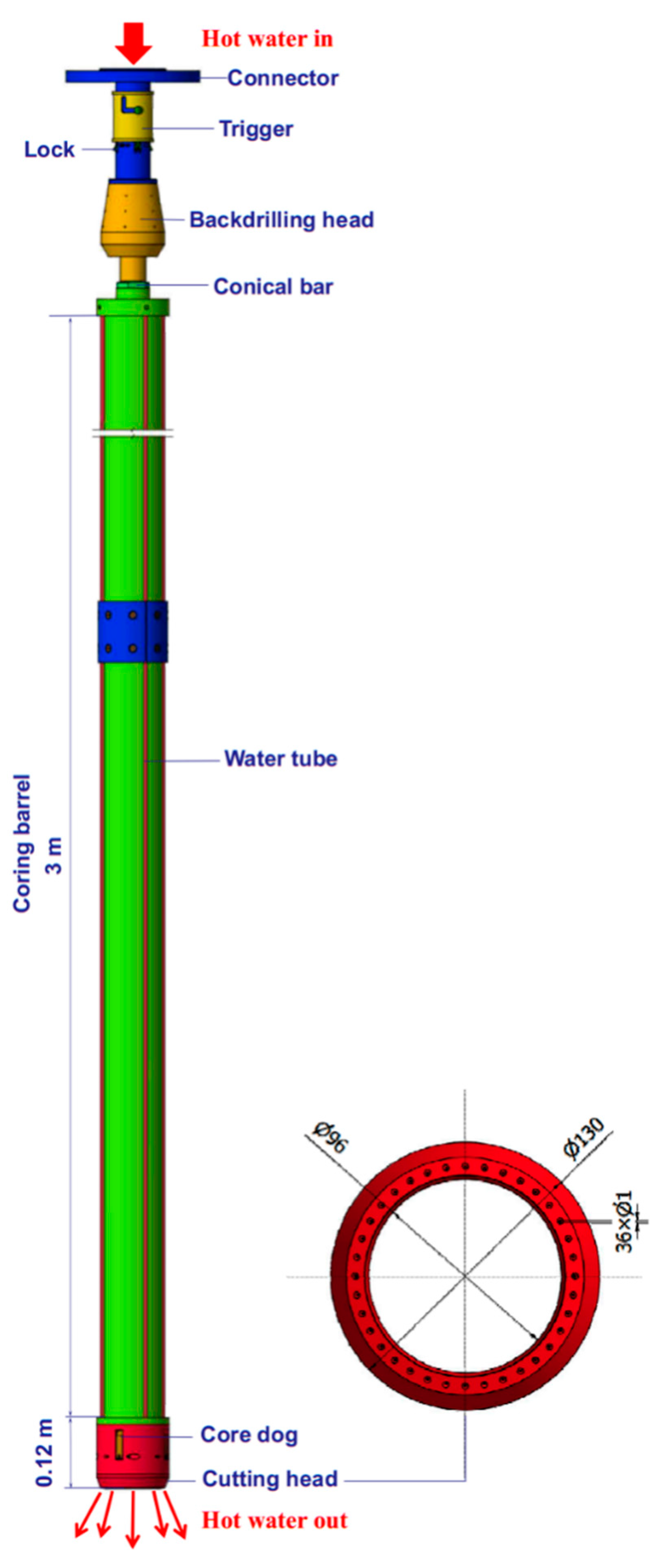
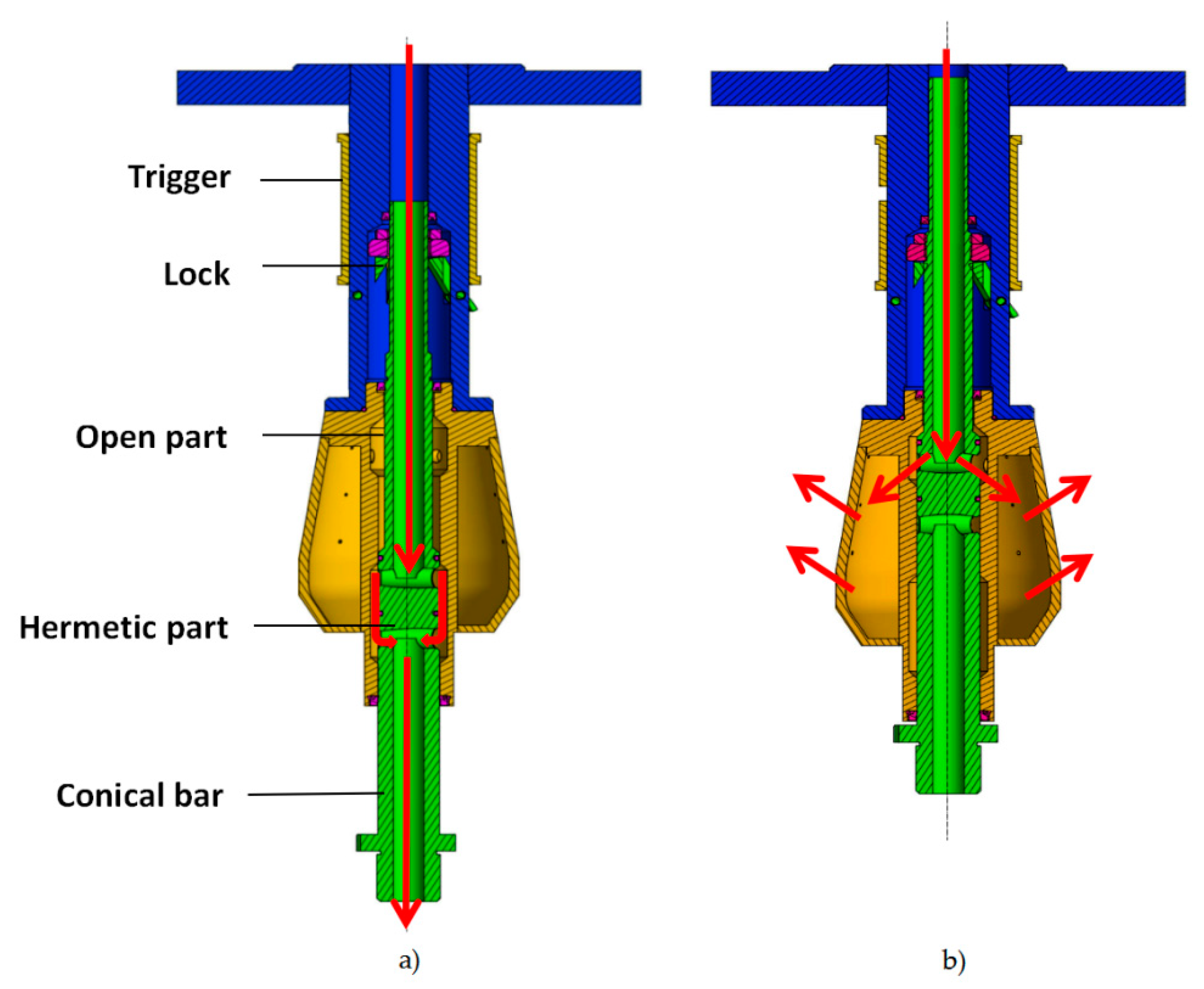
3. Design of the Hot Water Ice-Coring Drill
4. Theoretical Estimations of the Hot Water Ice-Coring Drilling Parameters
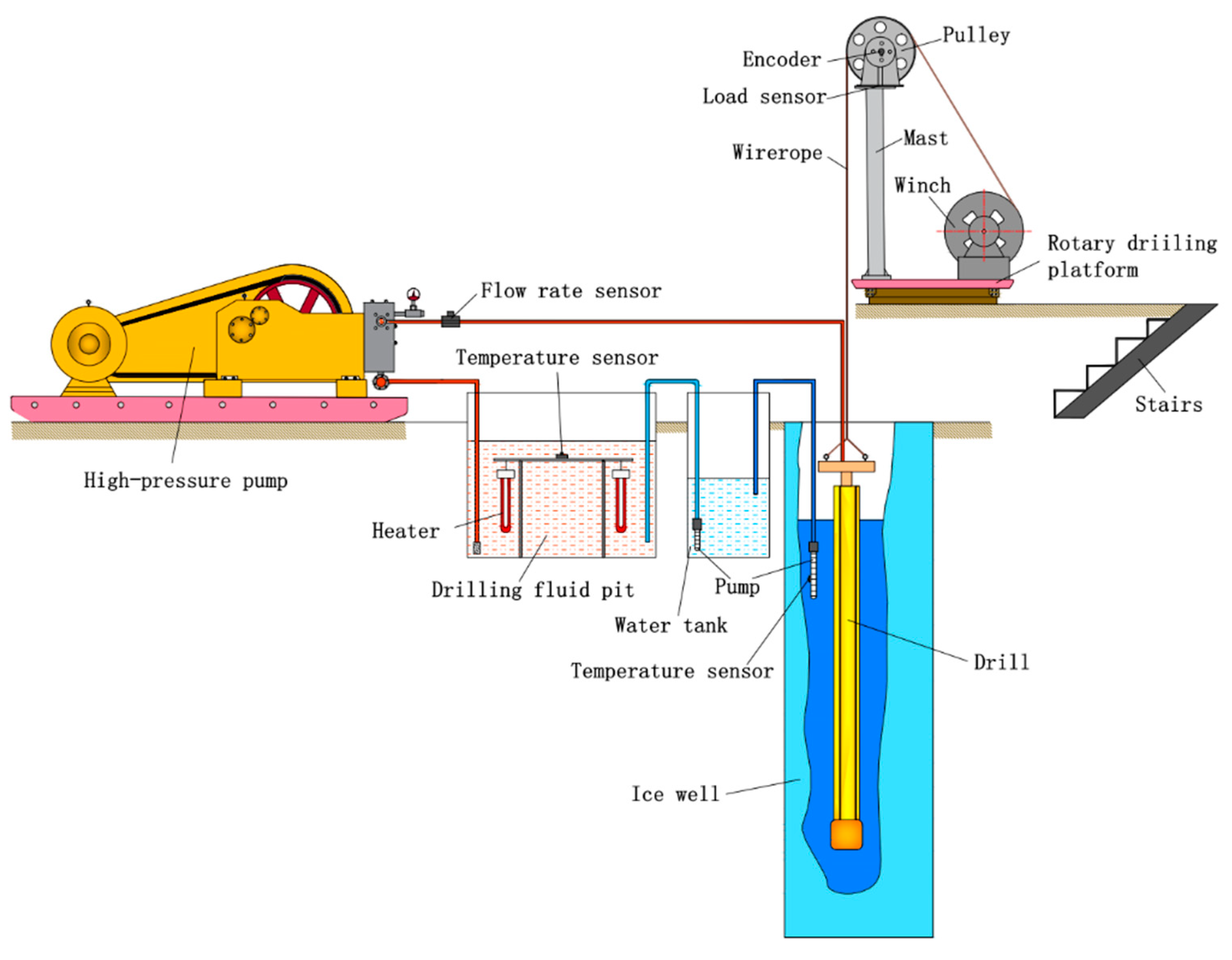
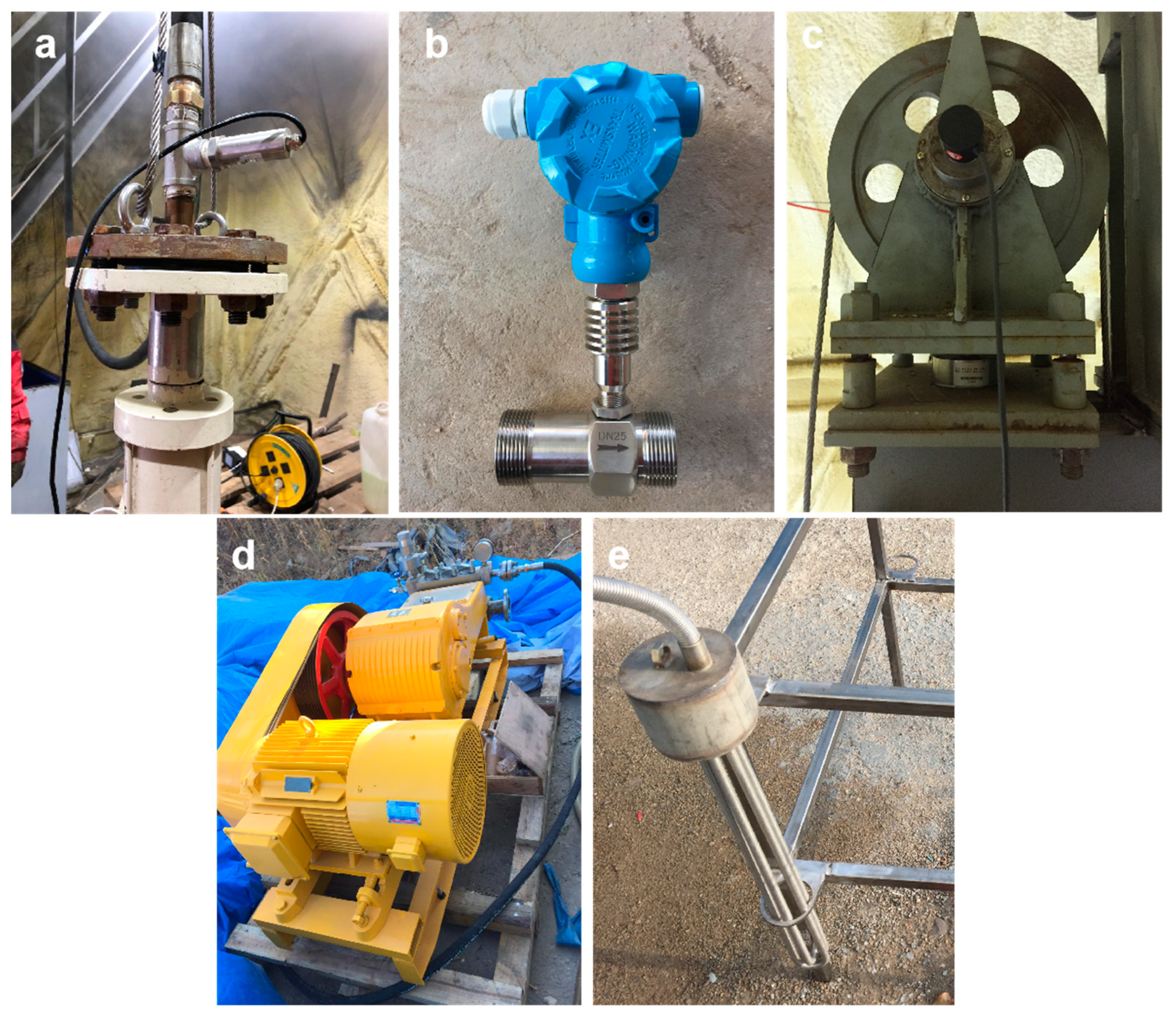
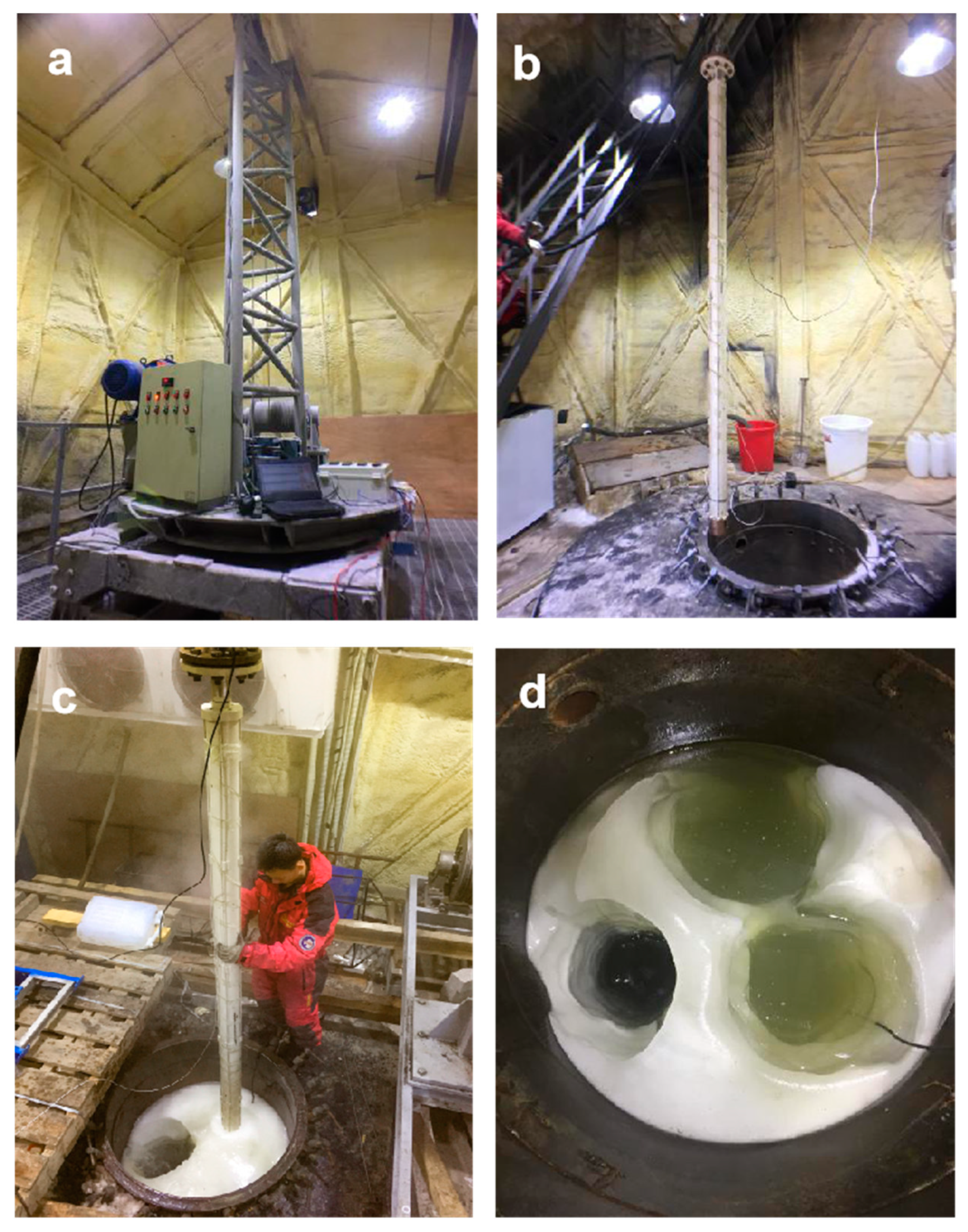
5. Testing Procedure
6. Test Results and Analysis
7. Conclusions
- (1)
- A hot water ice-coring drill was designed with a special mechanism that can redirect the flow of hot water upwards, that allows the borehole to be enlarged during back drilling to prevent borehole closure from happening.
- (2)
- The drill was tested many times in the ice drill testing facility in Jilin University, China. Test results showed that the drill worked adequately to recover ice cores.
- (3)
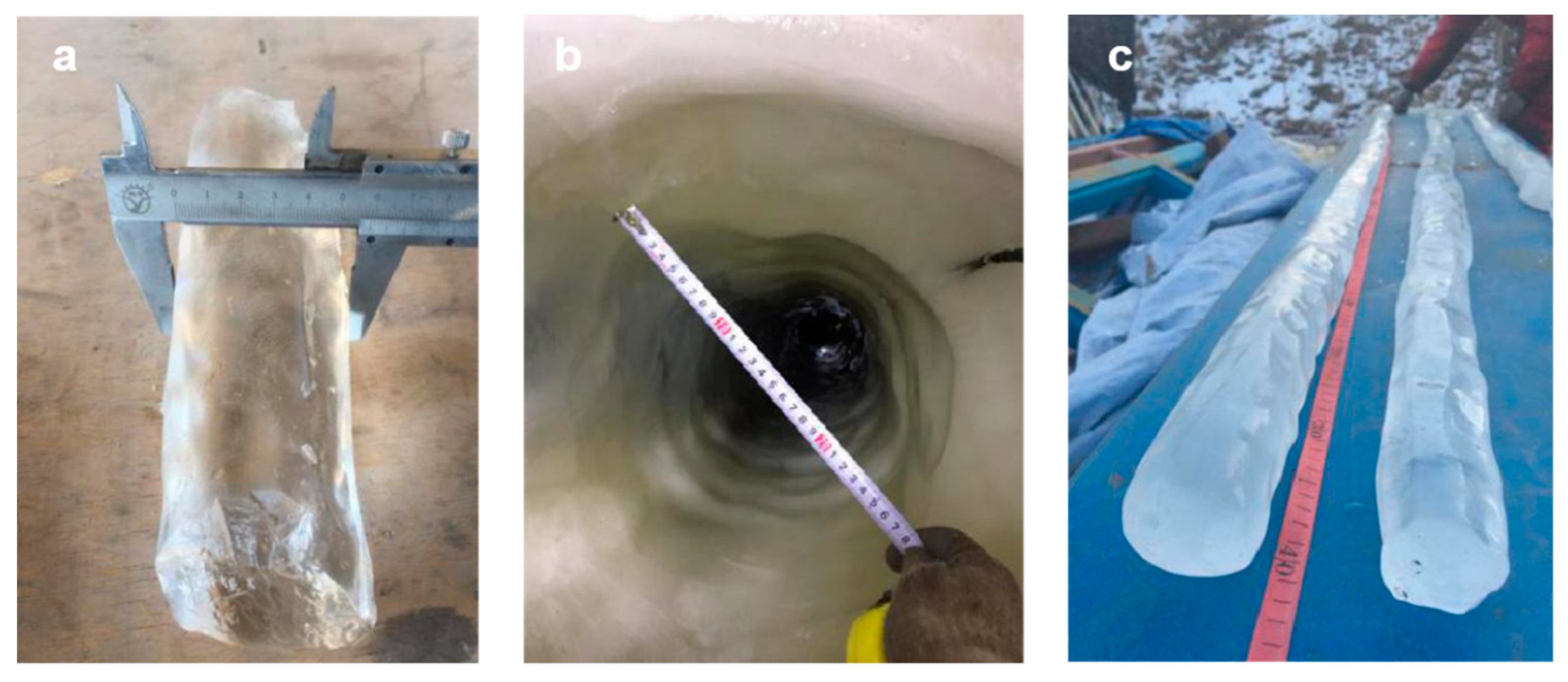
- Relations between ROP and hot water flow rates at different water temperatures were obtained from analysis of the test results. Choosing optimal values for the operation parameters is often a trade-off among different objectives, such as penetration rate and large size of ice cores. The trade-off temperature for the ice-coring drill was 50 °C, and the trade-off water flow rate was between 42 L/min to 55 L/min, which allowed acquisition of ice cores of the best quality (the maximum diameter of ice core).
- (4)
- Theoretical estimations were also performed and compared with the test data. Comparison showed that there was a good agreement between theoretical calculation and experimental results, which indicates that the theoretical estimation can be a good reference when preliminary assessment of the Chinese Hot Water Drilling System is performed in the field.
Author Contributions
Funding
Conflicts of Interest
References
- Langway, C.C., Jr. The history of early polar ice cores. Cold Reg. Sci. Technol. 2008, 52, 101–117. [Google Scholar] [CrossRef]
- Árnason, B.; Björnsson, H.; Theodórsson, P. Mechanical drill for deep coring in temperate ice. J. Glaciol. 1974, 13, 133–139. [Google Scholar] [CrossRef]
- Kudryashov, B.B.; Vasiliev, N.I.; Vostretsov, R.N.; Dmitriev, A.N.; Zubkov, V.M.; Krasilev, A.V. Deep ice coring at Vostok Station (East Antarctica) by an electromechanical drill. Mem. Natl. Inst. Polar Res. Spec. Issue 2002, 56, 91–102. [Google Scholar]
- Talalay, P.G. Perspectives for development of ice drilling technology: A discussion. Ann. Glaciol. 2014, 55, 339–350. [Google Scholar] [CrossRef]
- Gundestrup, N.S.; Johnsen, S.J.; Reeh, N. ISTUK: A Deep Ice Core Drill System. In Proceedings of the Second International Workshop/Symposium on Ice Drilling Technology, Calgary, AB, Canada, 30–31 August 1982; pp. 7–19. [Google Scholar]
- Hansen, S.B.; Steffensen, J.P.; Augustin, L.; Journé, P.; Alemany, O.; Rufli, H.; Motoyama, H.; Popp, T.; Talalay, P.; Zagorodnov, V.; et al. The Hans Tausen drill: Design, performance, further developments and some lessons learned. Ann. Glaciol. 2007, 47, 89–98. [Google Scholar]
- Talalay, P.; Yang, C.; Cao, P.; Wang, R.; Zhang, N.; Fan, X.; Yang, Y.; Sun, Y. Ice-core drilling problems and solutions. Cold Reg. Sci. Technol. 2015, 120, 1–20. [Google Scholar] [CrossRef]
- Gillet, F.; Donnou, D.; Girard, C.; Manouvrier, A.; Rado, C. Ice Core Quality in Electromechanical Drilling. In Proceedings of the Second International Workshop/Symposium on Ice Drilling Technology, Calgary, AB, Canada, 30–31 August 1982; pp. 73–80. [Google Scholar]
- Talalay, P.; Fan, X.; Xu, H.; Yu, D.; Han, L.; Han, J.; Sun, Y. Drilling fluid technology in ice sheets: Hydrostatic pressure and borehole closure considerations. Cold Reg. Sci. Technol. 2014, 98, 47–54. [Google Scholar] [CrossRef]
- Zagorodnov, V.S.; Thompson, L.G.; Mosley-Thompson, E.; Kelley, J.J. Ice core drilling complications. Mem. Natl. Inst. Polar Res. Spec. Issue 2002, 56, 196–205. [Google Scholar]
- Zagorodnov, V.; Thompson, L. Thermal electric ice-core drills: History and new design options for intermediate-depth drilling. Ann. Glaciol. 2014, 55, 322–330. [Google Scholar] [CrossRef]
- Zagorodnov, V.S. Antifreeze-thermodrilling of cores in arctic sheet glaciers. In Proceedings of the 3rd International Workshop on Ice Drilling Technology, Grenoble, France, 10–14 October 1988; pp. 97–109. [Google Scholar]
- Schwikowski, M.; Jenk, T.M.; Stampfli, D.; Stampfli, F. A new thermal drilling system for high-altitude or temperate glaciers. Ann. Glaciol. 2017, 55, 131–136. [Google Scholar] [CrossRef]
- Vasiliev, N.I.; Talalay, P.G. Twenty Years of Drilling the Deepest Hole in Ice. Sci. Drill. 2011, 11, 41–45. [Google Scholar] [CrossRef]
- Talalay, P.; Vasiliev, N.; Bobin, N.; Chistyakov, V.; Zubkov, V.; Krasilev, A.; Dmitriev, A.; Yankilevich, S.; Lipenkov, V. Deep drilling at Vostok station, Antarctica: History and recent events. Ann. Glaciol. 2007, 47, 10–23. [Google Scholar]
- Iken, A.; Rothlisberger, H.; Hutter, K. Deep drilling with a hot water jet. Z. Gletscherk. Glazialgeol. 1976, 12, 143–156. [Google Scholar]
- Browning, J.A.; Bigl, R.A.; Somerville, D.A. Hot-water drilling and coring at site J-9, Ross Ice Shelf. Antarct. J. USA 1979, 14, 60–61. [Google Scholar]
- Makinson, K.; Anker, P.G. The BAS ice-shelf hot-water drill: Design, methods and tools. Ann. Glaciol. 2014, 55, 44–52. [Google Scholar] [CrossRef]
- Fountain, A.G.; Walder, J.S. Water flow through temperate glaciers. Rev. Geophys. 1998, 36, 299–328. [Google Scholar] [CrossRef]
- Engelhardt, H.; Kamb, B.; Bolsey, R. A hot-water ice- coring drill. J. Glaciol. 2000, 46, 341–345. [Google Scholar] [CrossRef]
- Gow, A.J.; Engelhardt, H. Preliminary analysis of ice cores from Siple Dome, West Antarctica. In Proceedings of the International Symposium on Physics of Ice Core Records, Hokkaido, Japan, 14–17 September 1998; pp. 63–82. [Google Scholar]
- Li, Y.; (Polar Research Center of China, China); Pavel, T.G.; (Polar Research Center of Jilin University, China). Personal communication, 2017.
- Yang, Y.; Fan, X.; Pavel, T.; Liu, A.; Yang, W. Research on rapid coring drill by hot water driving for subglacial bedrock in Antarctic. Explor. Eng. 2017, 7, 48–51. [Google Scholar]
- Taylor, P.L. Hot Water Drill for Temperate Ice; CRREL Special Report; US Army Cold Regions Research & Engineering Lab.: Hanover, NH, USA, 1984; pp. 105–117. [Google Scholar]
- Greenler, L.; Benson, T.; Cherwinka, J.; Elcheikh, A.; Feyzi, F.; Karle, A.; Paulos, R. Modeling hole size, lifetime and fuel consumption in hot-water ice drilling. Ann. Glaciol. 2014, 55, 115–123. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Avg Water Temperature (°C) | Avg Water Flow Rate (L/min) | Mean Borehole Diameter (mm) | Max Core Diameter (mm) | Avg Core Diameter (mm) | Length of Core (m) | Avg ROP * (m/h) | Run No. |
|---|---|---|---|---|---|---|---|
| 72 | 53 | 271 | 62 | 49 | 2.8 | 27.7 | 1 |
| 63 | 58 | 269 | 60 | 51 | 2.42 | 27.3 | 2 |
| 50 | 55 | 257 | 63 | 58 | 2.58 | 23.3 | 3 |
| 50 | 54 | 253 | 56 | 47 | 2.55 | 21.8 | 4 |
| 50 | 45 | 241 | 64 | 59 | 1.31 | 18.6 | 5 |
| 50 | 34 | 223 | 43 | 40 | 2.48 | 15.6 | 6 |
| 50 | 46 | 227 | 71 | 57 | 2.57 | 20.4 | 7 |
| 51 | 43 | 229 | 60 | 56 | 1.97 | 17.9 | 8 |
| 60 | 50 | 263 | 57 | 51 | 2.23 | 23.1 | 9 |
| 60 | 43 | 253 | 61 | 54 | 1.98 | 20.1 | 10 |
| 60 | 33 | 245 | 52 | 47 | 2.57 | 17.5 | 11 |
| 60 | 45 | 257 | 66 | 55 | 1.75 | 22.7 | 12 |
| 60 | 44 | 259 | 70 | 55 | 1.65 | 20.5 | 13 |
| 67 | 52 | 273 | 65 | 45 | 1.24 | 25.9 | 14 |
| 69 | 41 | 269 | 44 | 43 | 2.61 | 23.2 | 15 |
| 69 | 48 | 278 | 54 | 46 | 2.34 | 24.3 | 16 |
| 69 | 39 | 275 | 57 | 45 | 1.64 | 21.6 | 17 |
| 68 | 34 | 271 | 59 | 44 | 2.42 | 18.6 | 18 |
| Temperature (°C) | Root Mean Squared Error |
|---|---|
| 70 | 1.23 |
| 60 | 1.20 |
| 50 | 1.21 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, A.; Wang, R.; Fan, X.; Yang, Y.; Li, X.; Wang, L.; Talalay, P. Test-Bed Performance of an Ice-Coring Drill Used with a Hot Water Drilling System. J. Mar. Sci. Eng. 2019, 7, 234. https://doi.org/10.3390/jmse7070234
Liu A, Wang R, Fan X, Yang Y, Li X, Wang L, Talalay P. Test-Bed Performance of an Ice-Coring Drill Used with a Hot Water Drilling System. Journal of Marine Science and Engineering. 2019; 7(7):234. https://doi.org/10.3390/jmse7070234
Chicago/Turabian StyleLiu, An, Rusheng Wang, Xiaopeng Fan, Yang Yang, Xingchen Li, Liang Wang, and Pavel Talalay. 2019. "Test-Bed Performance of an Ice-Coring Drill Used with a Hot Water Drilling System" Journal of Marine Science and Engineering 7, no. 7: 234. https://doi.org/10.3390/jmse7070234
APA StyleLiu, A., Wang, R., Fan, X., Yang, Y., Li, X., Wang, L., & Talalay, P. (2019). Test-Bed Performance of an Ice-Coring Drill Used with a Hot Water Drilling System. Journal of Marine Science and Engineering, 7(7), 234. https://doi.org/10.3390/jmse7070234