Using Flexible Blades to Improve the Performance of Novel Small-Scale Counter-Rotating Self-Adaptable Wave Energy Converter for Unmanned Marine Equipment


 , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Conceptual Design and Implementation of Flexible Blade WEC
2.1. Initial Design of Rigid Blade WEC and Expected Application
2.2. Using Flexible Blades to Replace Rigid Ones
2.3. Structural Implement and Working Principle of Flexible Blade WEC
3. Theoretical and Numerical Analyses of Performance Characteristics
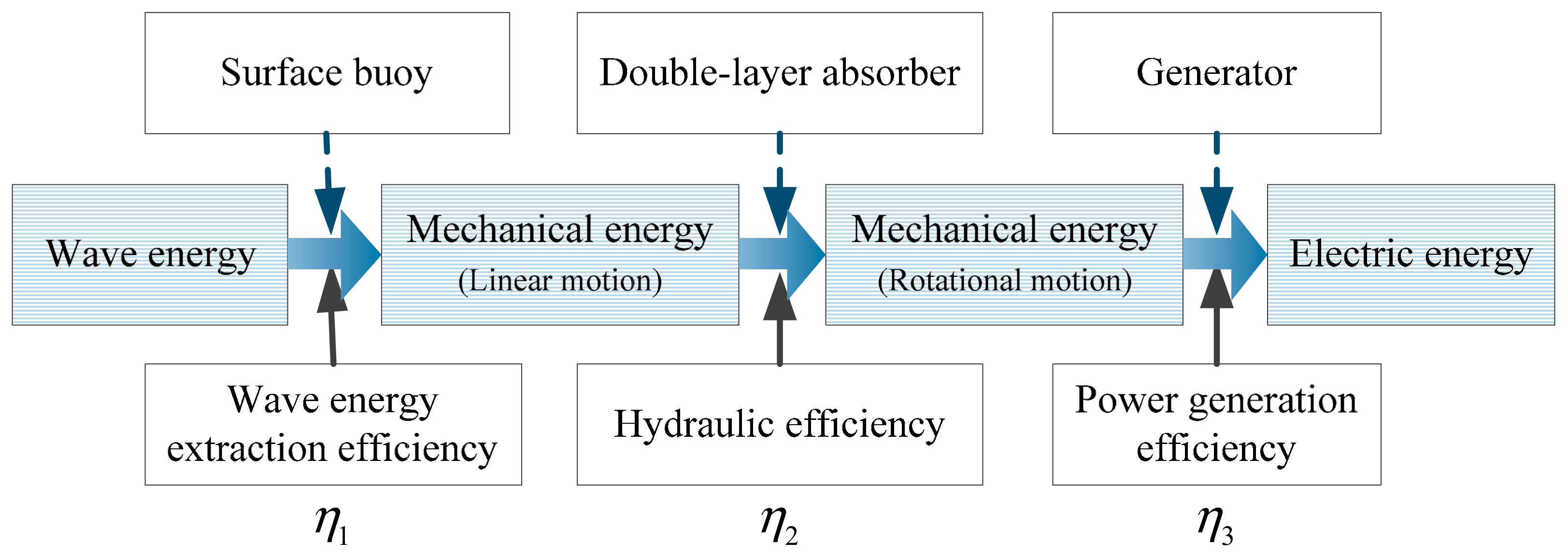
3.1. Analysis of Output Power and Efficiency Characteristics of the Absorber
3.2. Preliminary Analysis of Factors Affecting the Performance of WEC
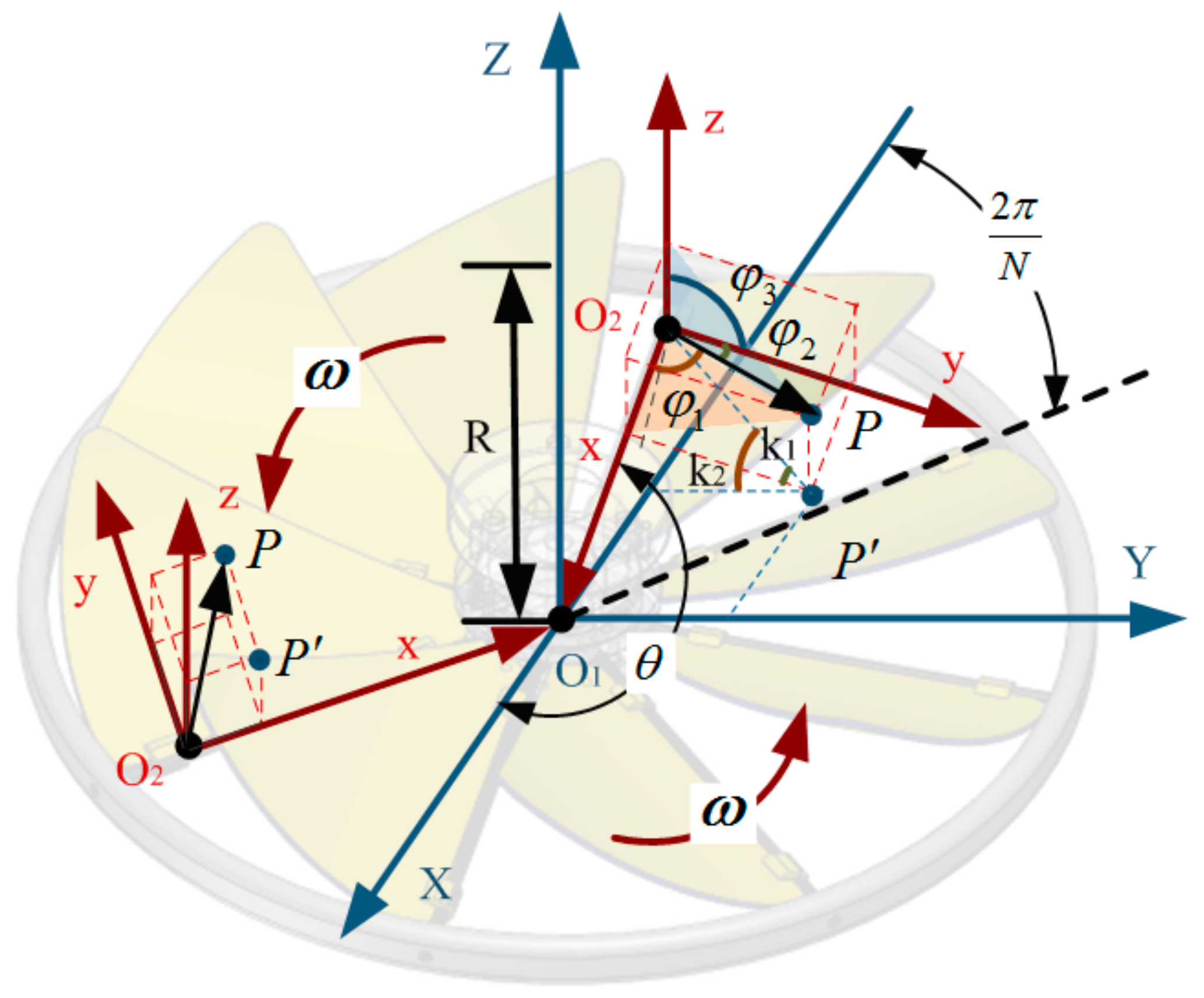
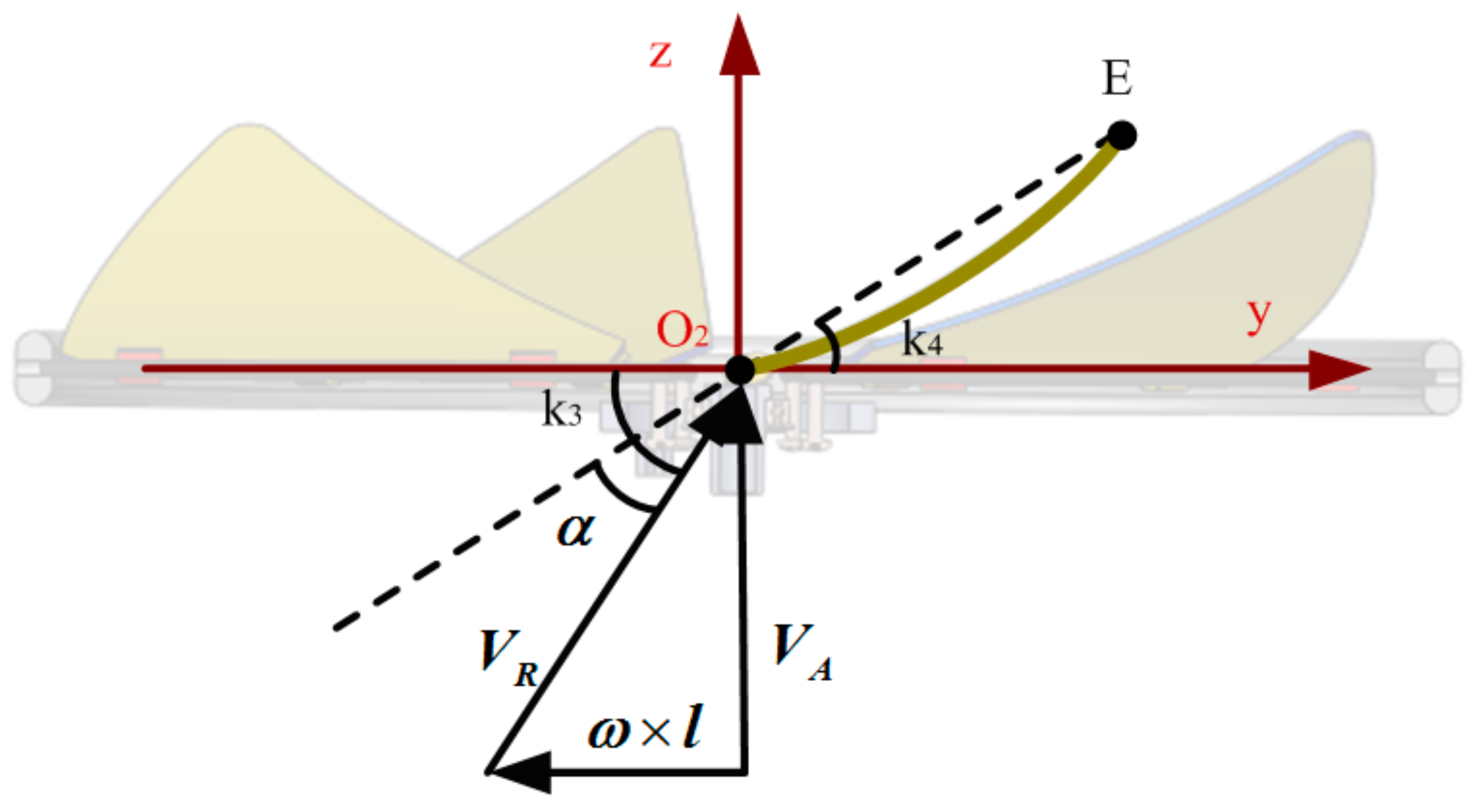
3.3. Theoretical Analysis of Kinematic Characteristics
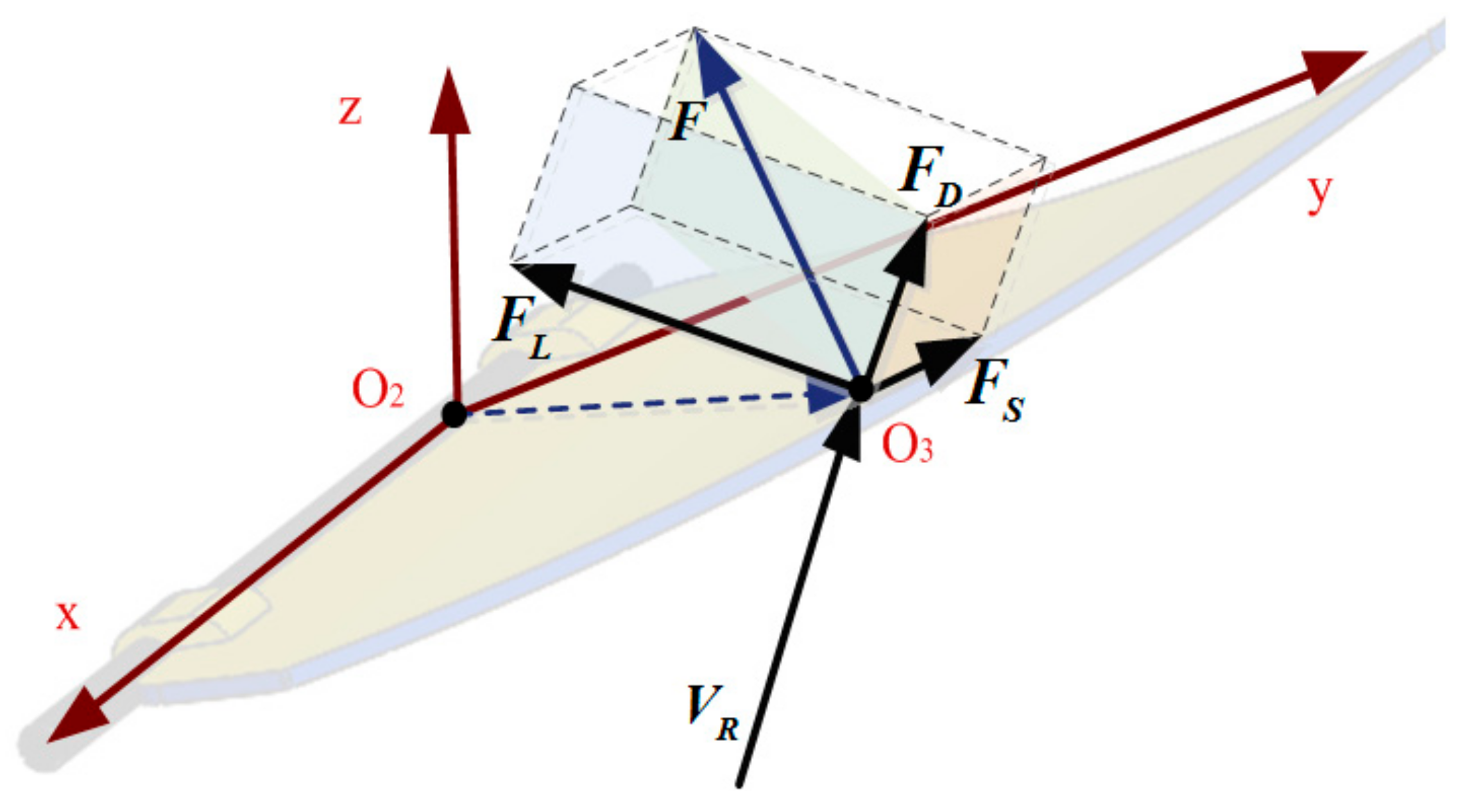
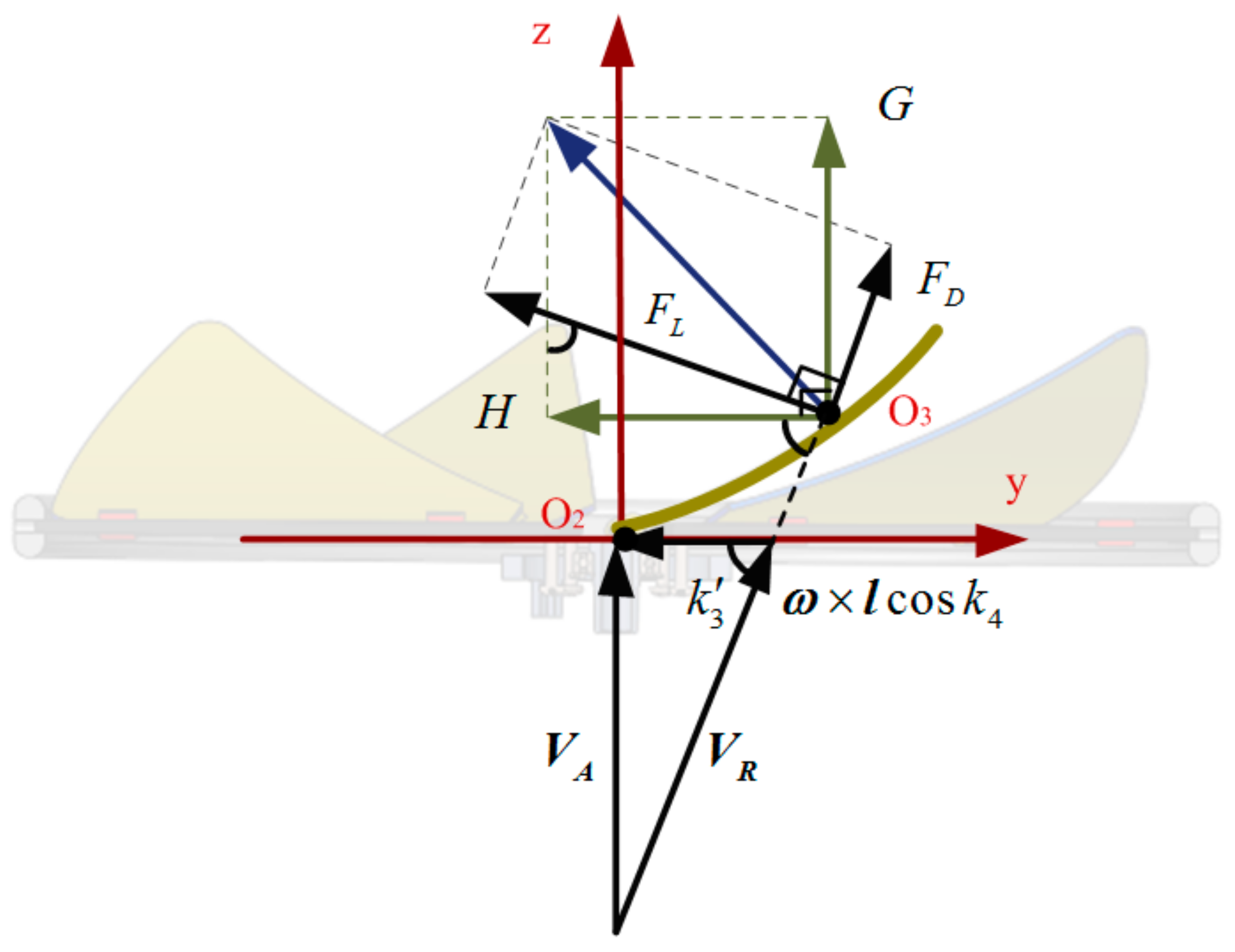
3.4. Theoretical Analysis of Dynamic Characteristic
3.5. Configuration of Numerical Simulations
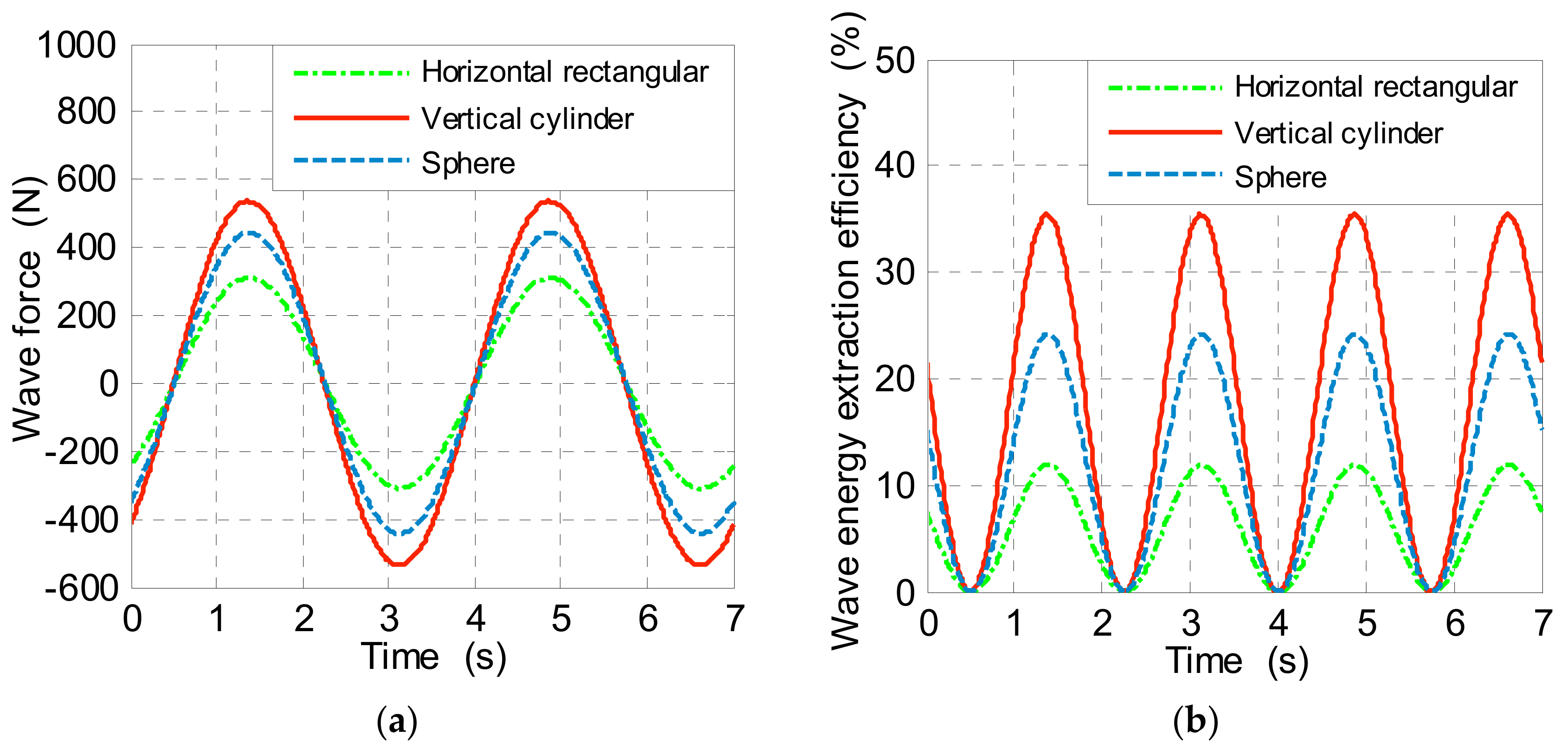
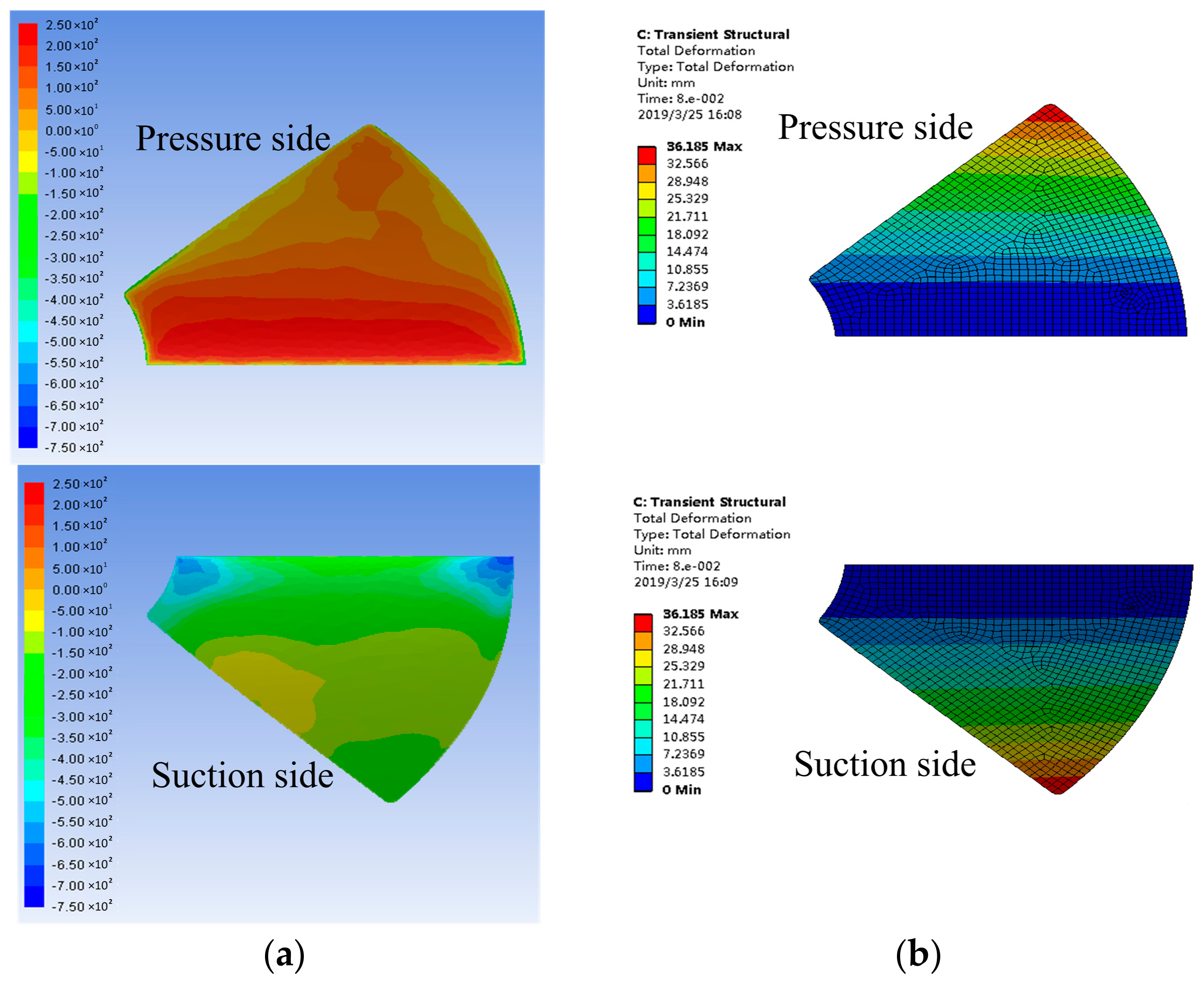
3.6. Analysis Results and Discussions
4. Experimental Results and Discussions
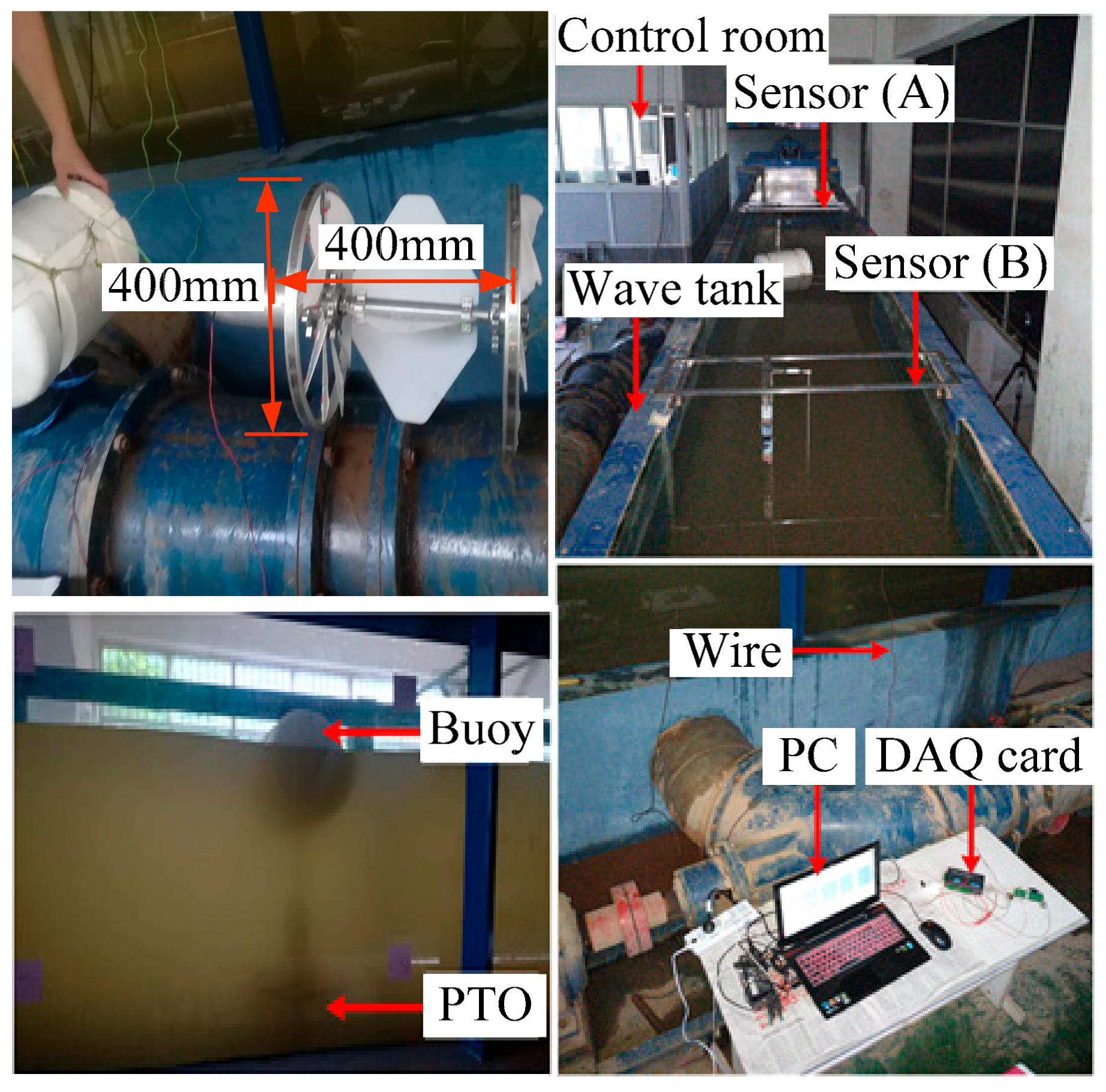
4.1. Experiments in Wave Tank
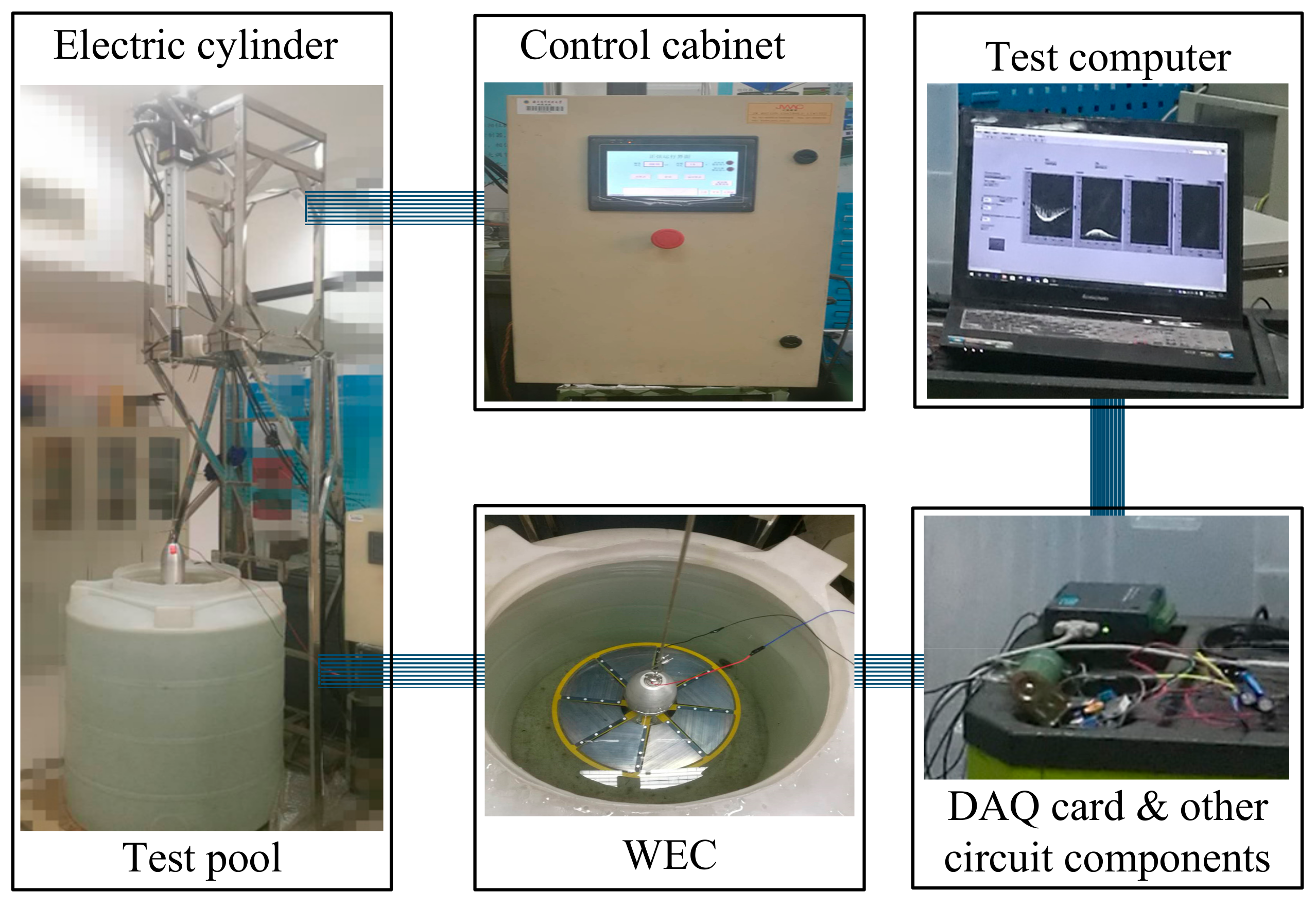
4.2. Experiments in Test Pool
5. Conclusions
- (1)
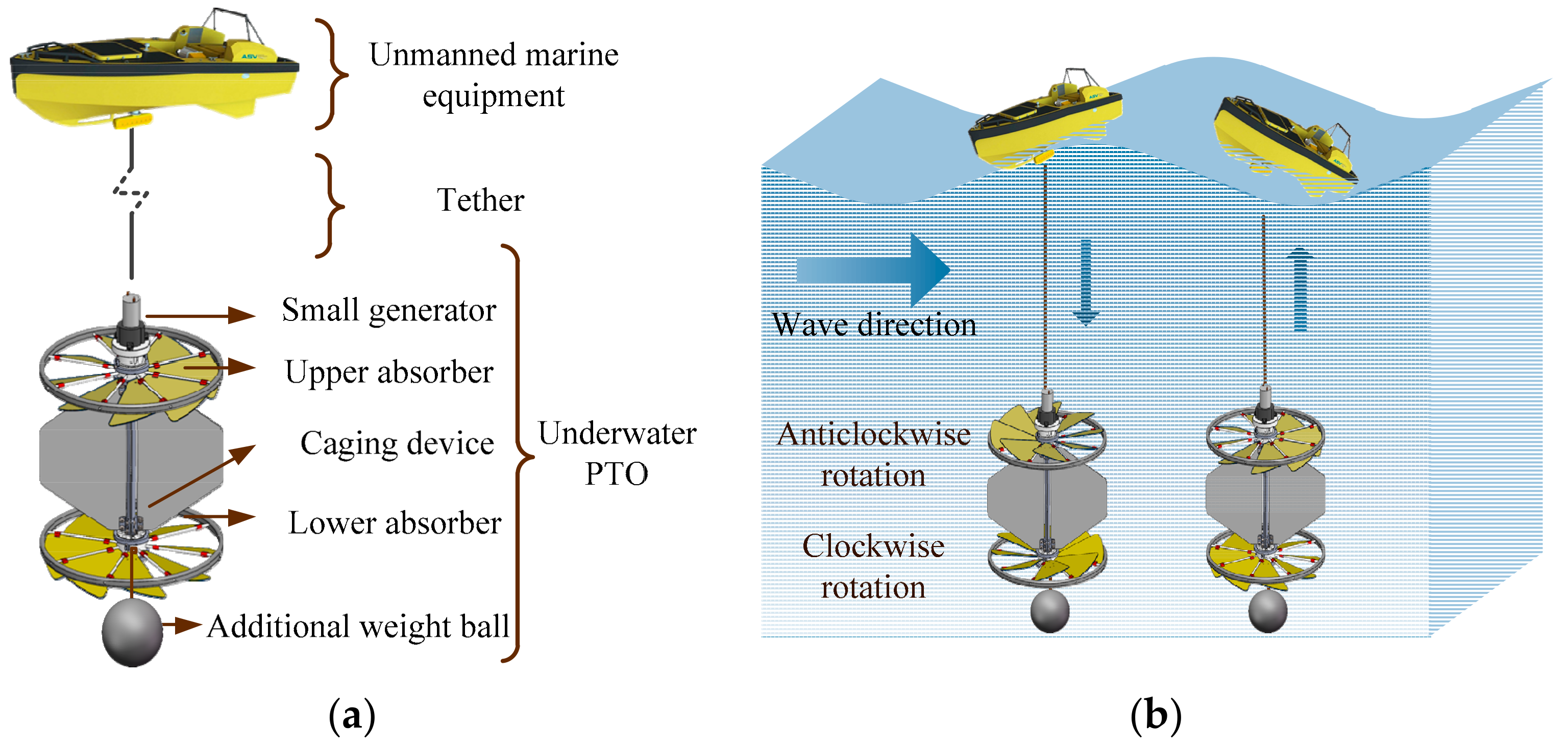
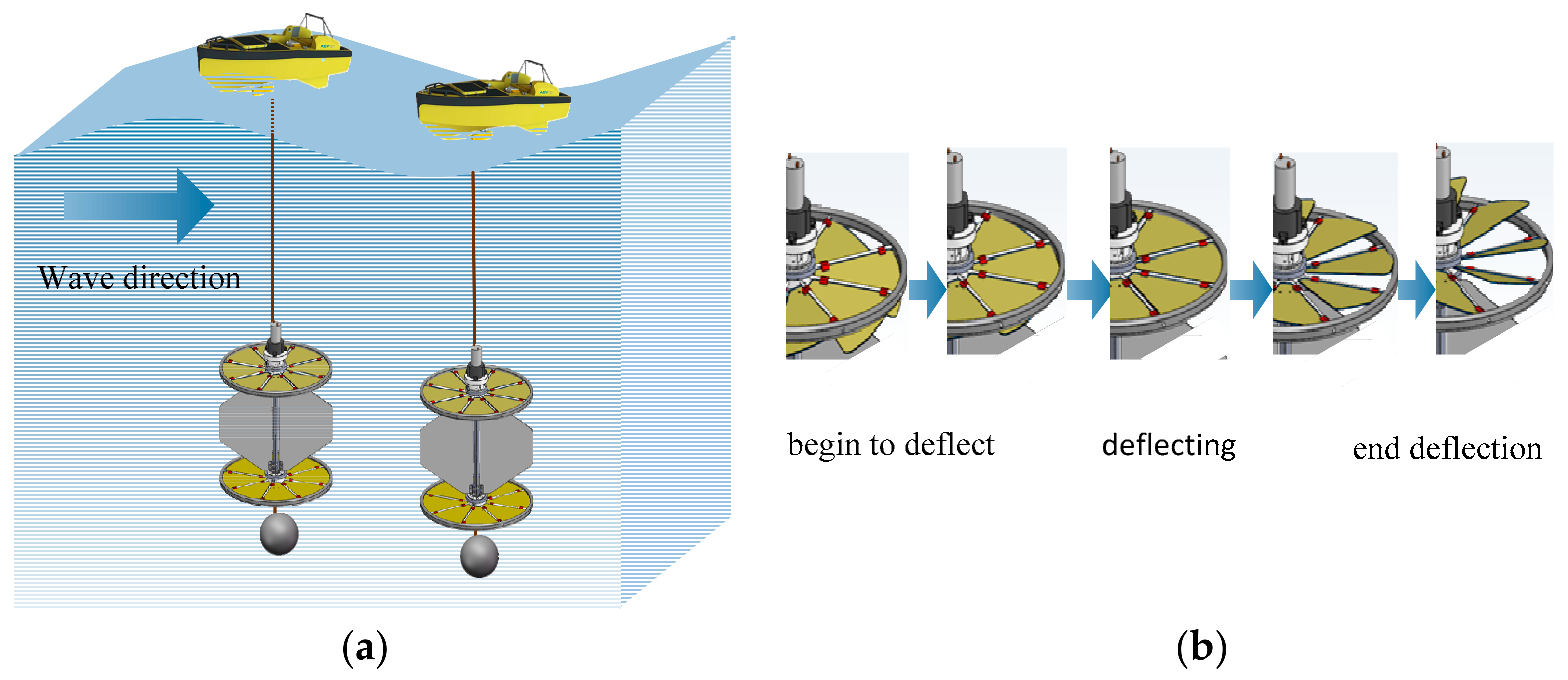
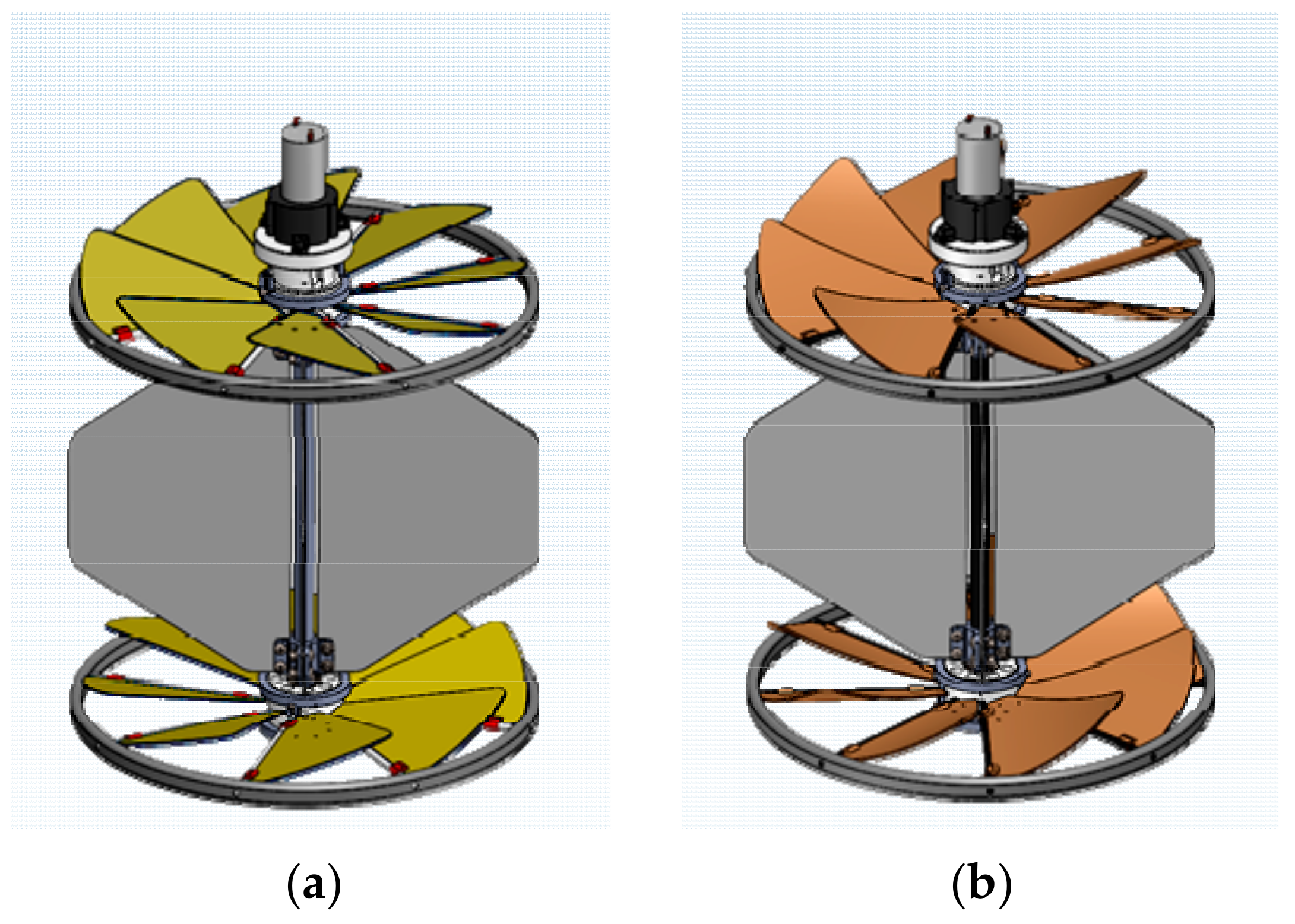
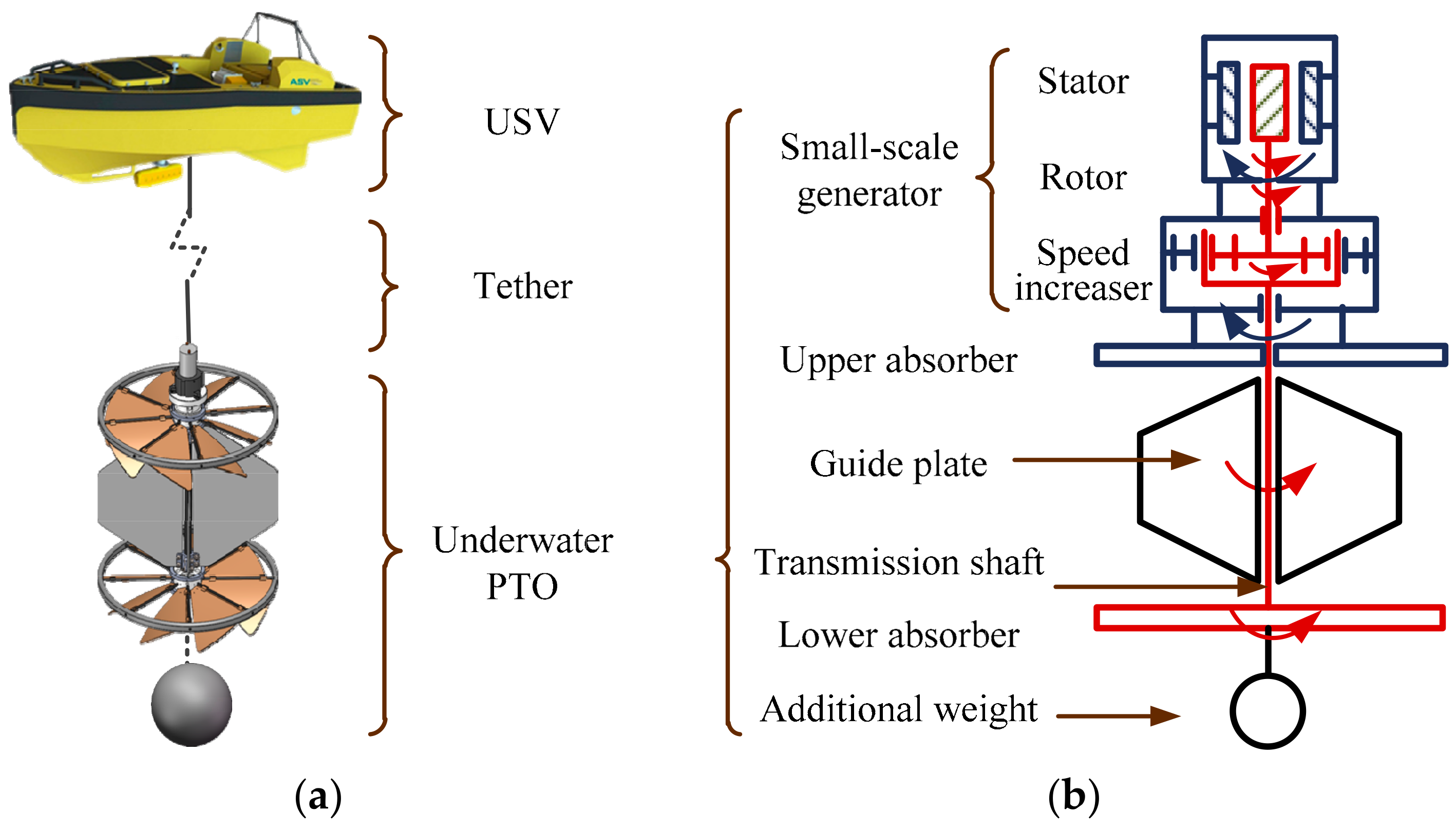
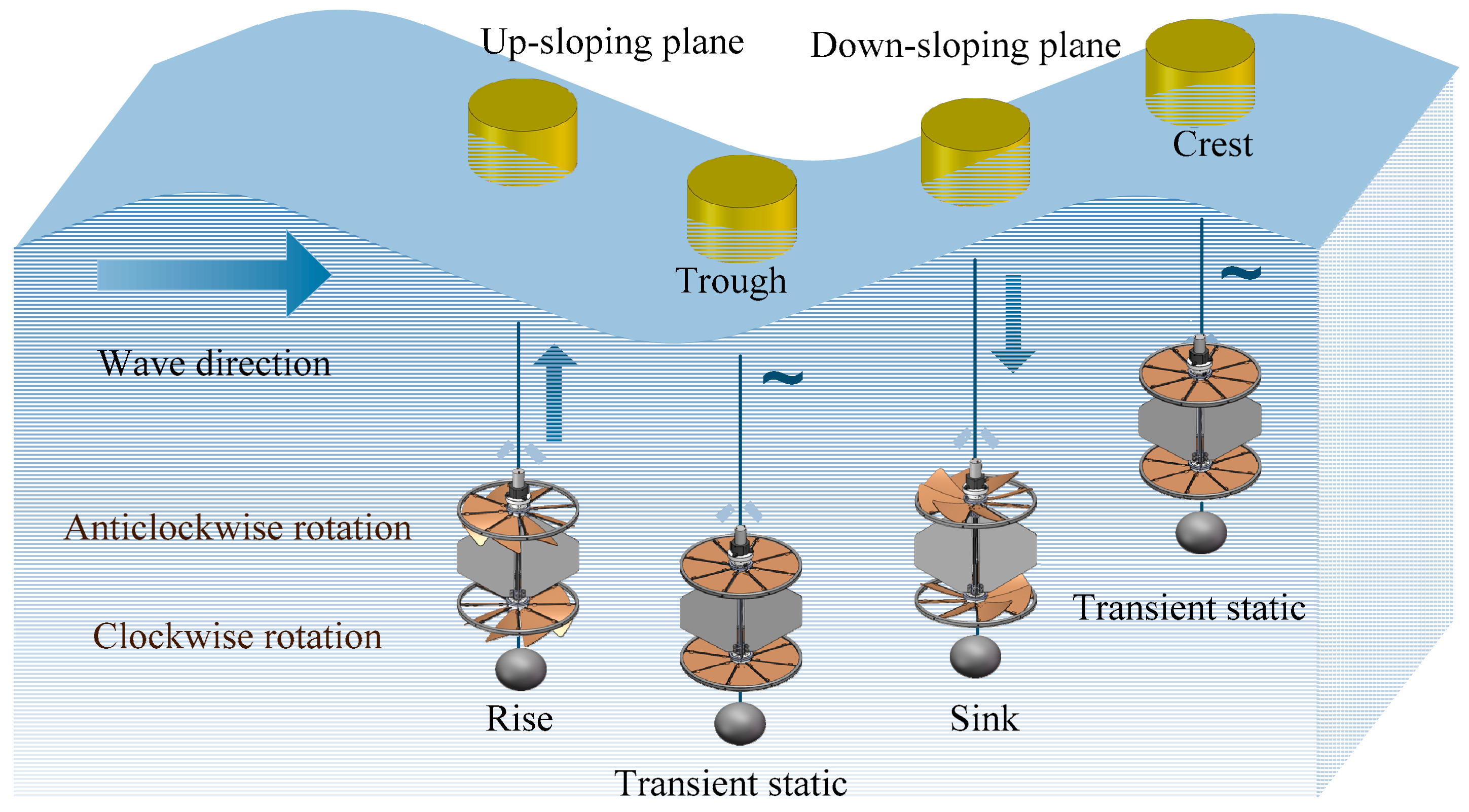
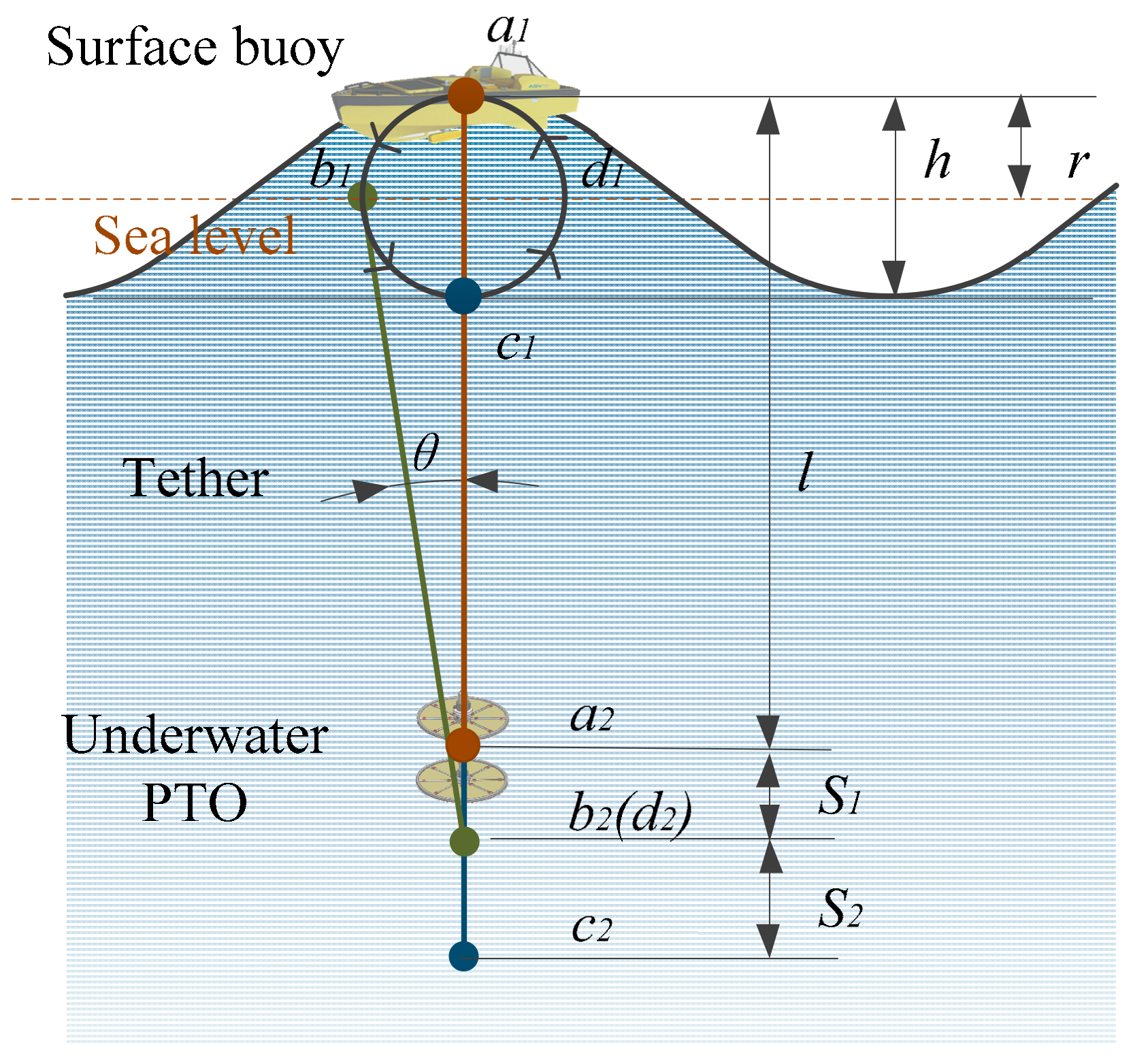
- The working principle of the small flexible blade WEC is feasible. The change in the deflection direction of the absorber blade is achieved by self-adaptable bending deformation of the flexible blade itself, which provides the required persistent torque for the unidirectional rotating motion of the single-layer absorber. The design of double-layer absorber balances the overall torque of underwater PTO well and provides the counter-rotating motion required for power generation.
- (2)
- The theoretical analysis results of the dynamic characteristics of the absorber and its flexible blades clarifies the influence of the structural parameters, operating parameters and the force acting on the blade surface on the performance characteristics of the WEC. This also provides a calculation basis for the data processing in the subsequent numerical simulations and verification experiments.
- (3)
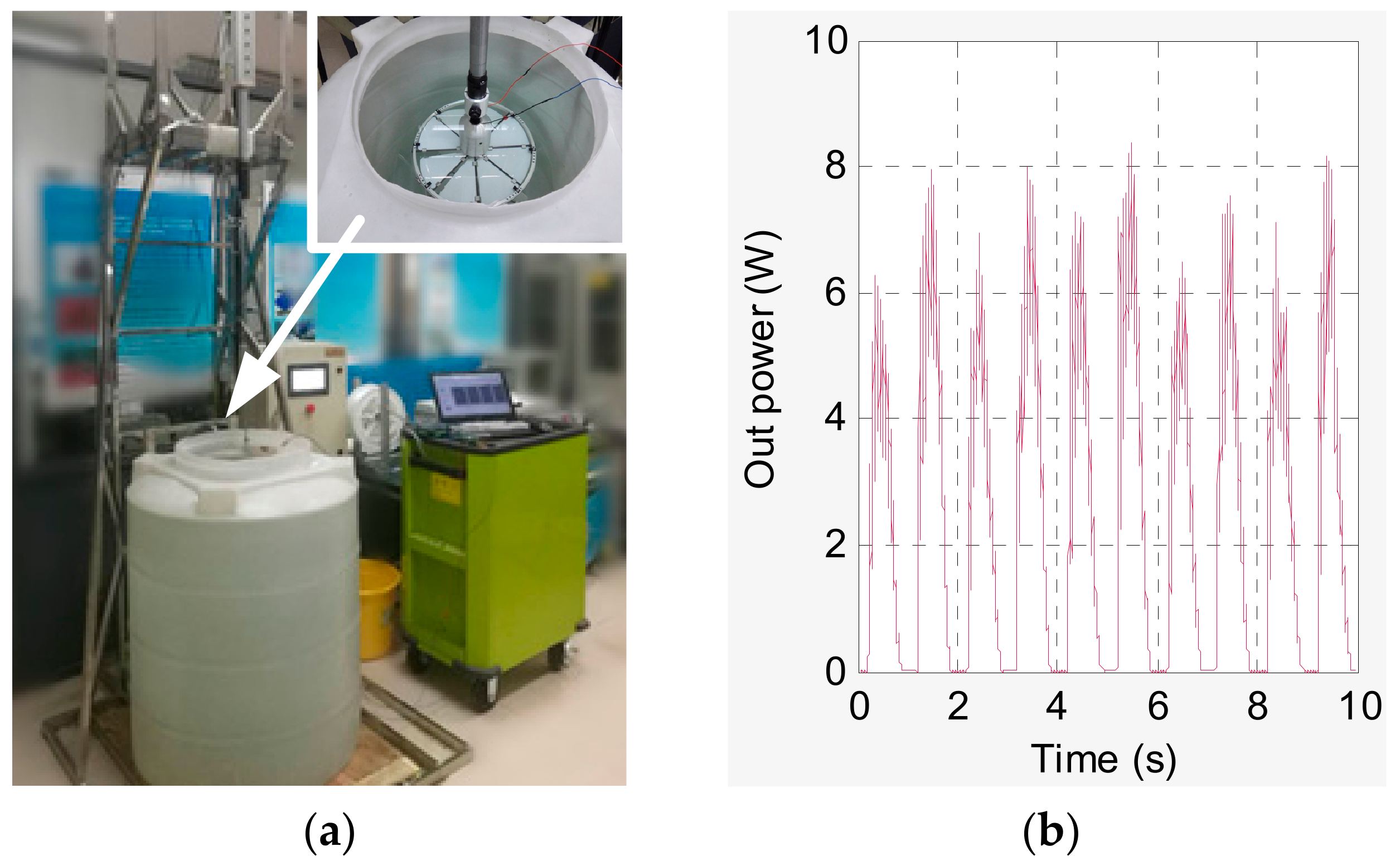
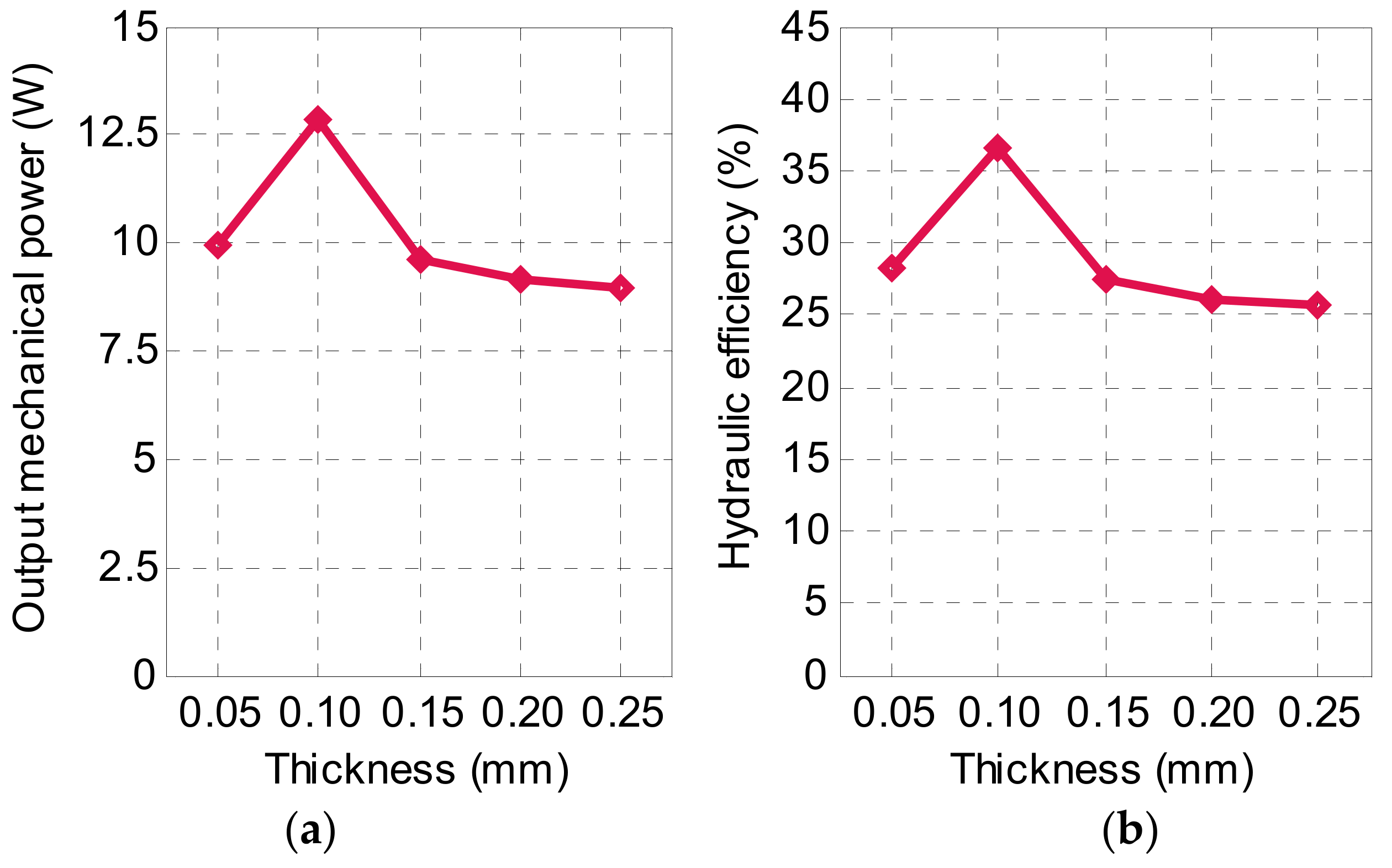
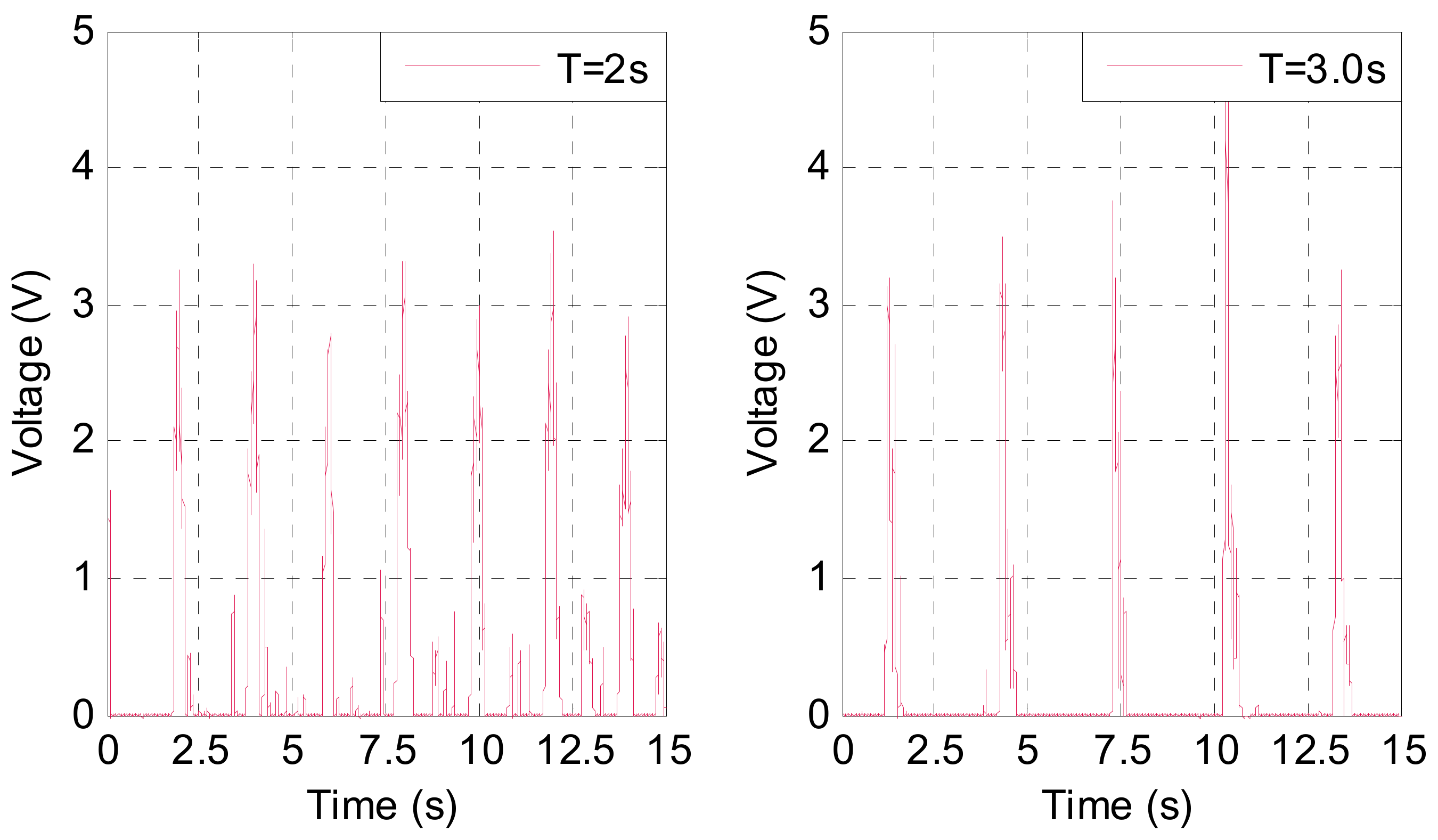
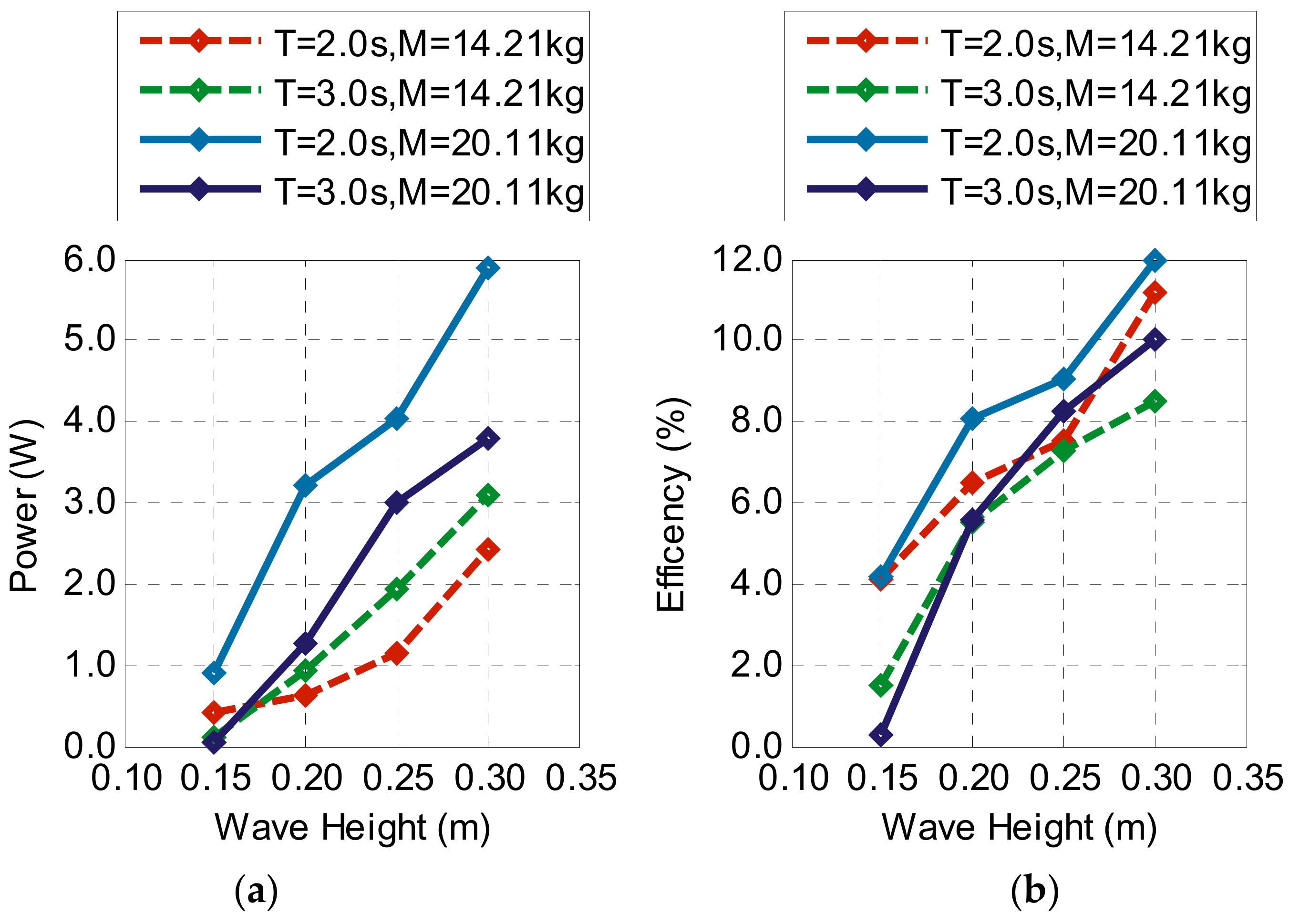
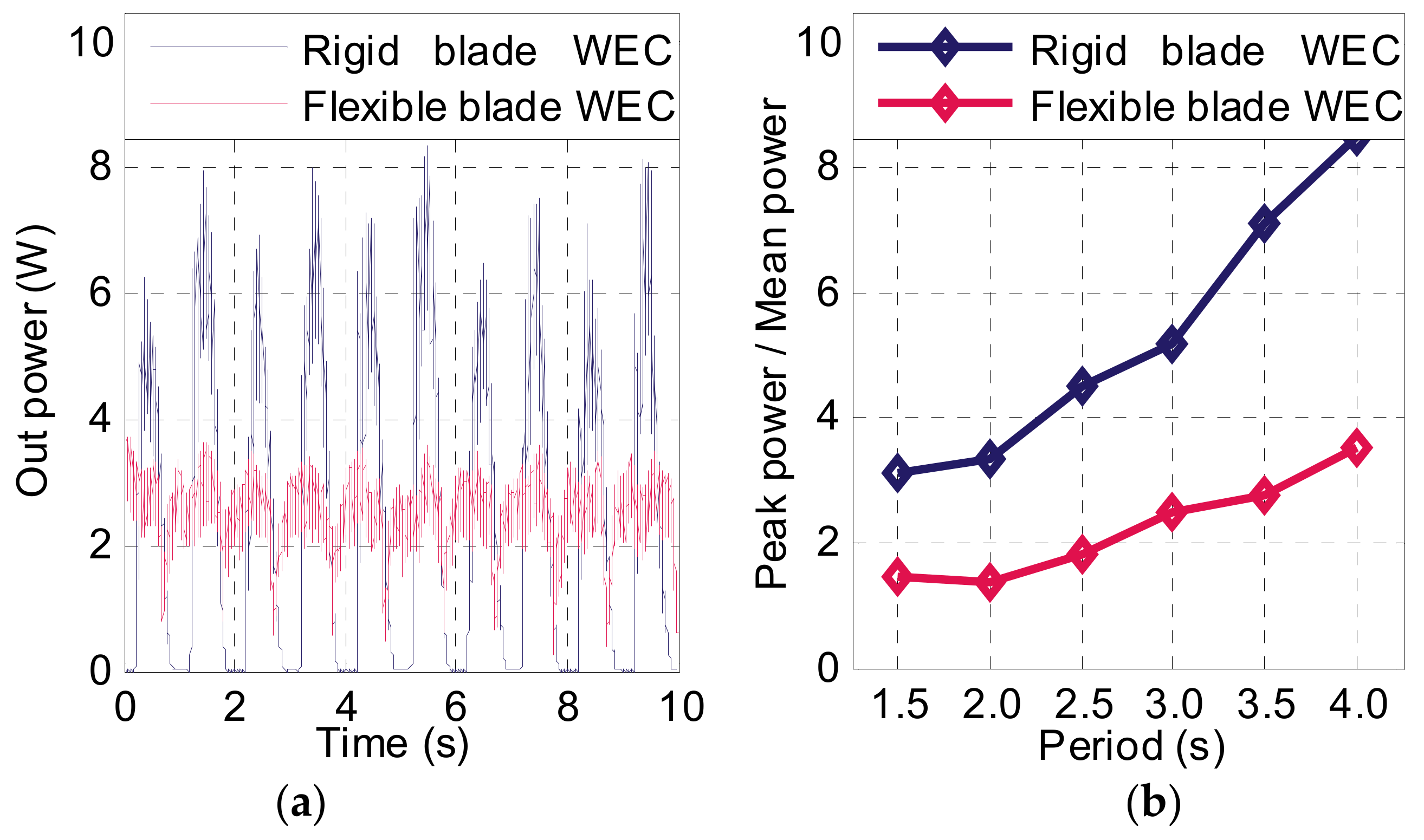
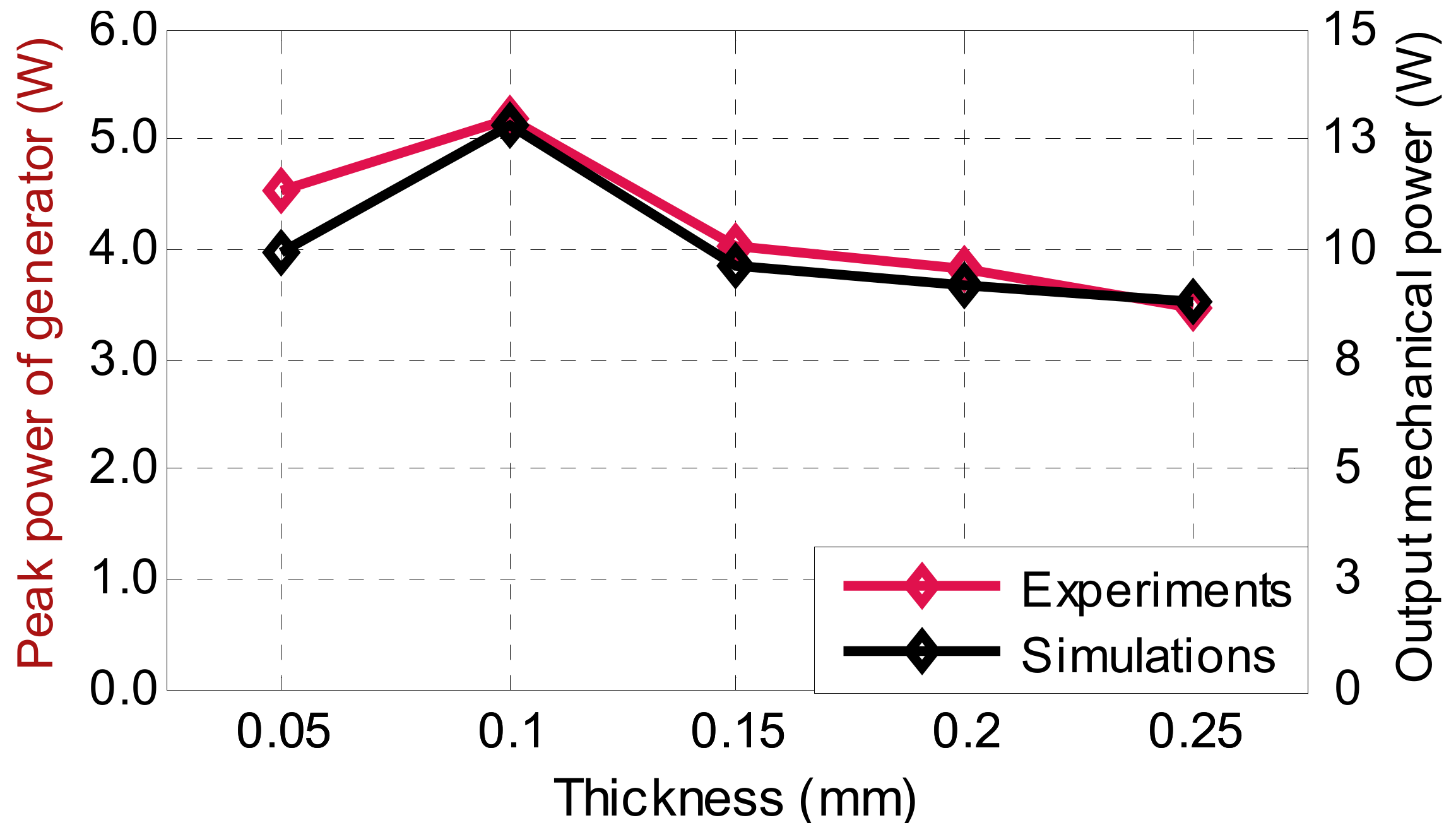
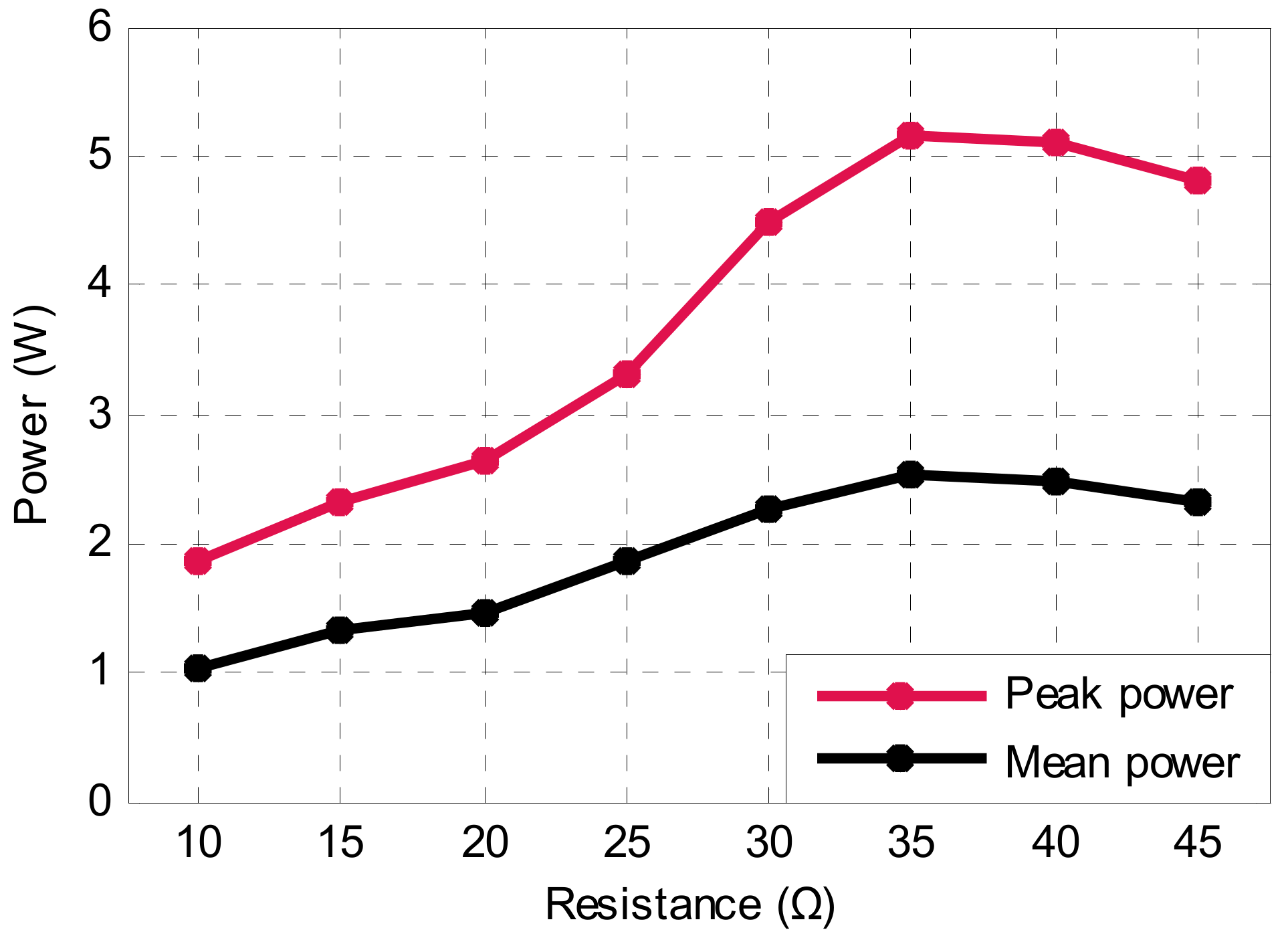
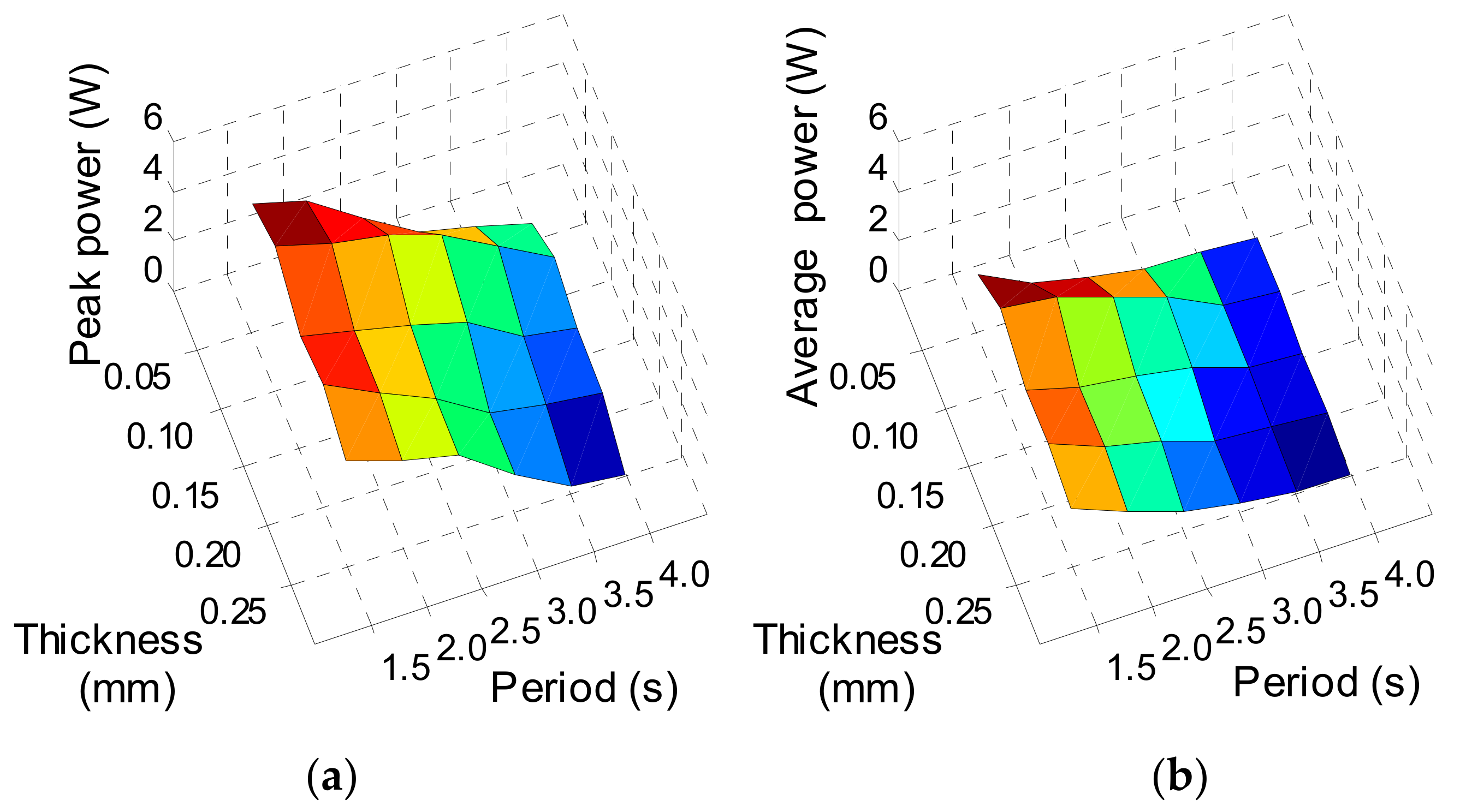
- The simulation and experiment results under laboratory conditions show that the mechanical power of the small WEC can reach 12.8 W and the hydraulic efficiency is 36.3%; the peak power of electricity generation is 5.8 W, and the average power is 3.2 W. In most heaving motion periods, the WEC with 65Mn flexible blades achieves the best performance characteristics when the blade thickness is 0.10 mm.
- (4)
- The study results in this paper show that the new generation of flexible blade WEC effectively overcomes the performance disadvantage of the excessive fluctuation of the previous generation of rigid blade WEC. The smooth power output curve facilitates the high-efficient utilization and storage of electric energy, and also makes the load torque fluctuation of the WEC smaller. This is conducive to smooth the operation of WEC and improve the self-adaptable power generation capability of the WEC under low sea states.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Incer, I. Renewable energy and sustainable development: A crucial review. Renew. Sustain. Energy Rev. 2000, 4, 157–175. [Google Scholar] [CrossRef]
- Etersen, S.; Krätschell, A.; Augustin, N.; Jamieson, J.; Hein, J.R.; Hannington, M.D. News from the seabed–Geological characteristics and resource potential of deep-sea mineral resources. Mar. Policy 2016, 70, 175–187. [Google Scholar] [CrossRef]
- Neill, S.P.; Vögler, A.; Goward-Brown, A.J.; Baston, S.; Lewis, M.J.; Gillibrand, P.A.; Waldman, S.; Woolf, D.K. The wave and tidal resource of Scotland. Renew. Energy 2017, 114, 3–17. [Google Scholar] [CrossRef]
- Ildow, J.T.; Mcilgorm, A. The importance of estimating the contribution of the oceans to national economies. Mar. Policy 2010, 34, 367–374. [Google Scholar]
- Lindemuth, M.; Murphy, R.; Steimle, E.; Armitage, W.; Dreger, K.; Elliot, T.; Hall, M.; Kalyadin, D.; Kramer, J.; Palankar, M. Sea robot-assisted inspection. IEEE Robot. Autom. Mag. 2011, 18, 96–107. [Google Scholar] [CrossRef]
- Seto, M.L. (Ed.) Marine Robot Autonomy; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Riksen, C.C.; Seaglider, A. Long-Range Autonomous Underwater Vehicle for Oceanographic Research. IEEE J. Ocean. Eng. 2001, 26, 424–436. [Google Scholar] [CrossRef]
- Ang, X.; Shang, J.; Luo, Z.; Tang, L.; Zhang, X.; Li, J. Reviews of power systems and environmental energy conversion for unmanned underwater vehicles. Renew. Sustain. Energy Rev. 2012, 16, 1958–1970. [Google Scholar]
- Insey, J.C.; Eustice, R.M.; Whitcomb, L.L. A survey of underwater vehicle navigation: Recent advances and new challenges. In Proceedings of the IFAC Conference of Manoeuvering and Control of Marine Craft, Lisbon, Portugal, 20–22 September 2006; Volume 88, pp. 1–12. [Google Scholar]
- Enderson, E.; Pantelakis, T.; An, E. Energy systems for FAU AUVs [autonomous underwater vehicles]. In Proceedings of the 2002 Workshop on Autonomous Underwater Vehicles, San Antonio, TX, USA, 21–21 June 2002; pp. 5–10. [Google Scholar]
- Ai, Q.; Brett, D.J.L.; Browning, D.; Brandon, N.P. A sizing-design methodology for hybrid fuel cell power systems and its application to an unmanned underwater vehicle. J. Power Sources 2010, 195, 6559–6569. [Google Scholar]
- Endez, A.; Leo, T.; Herreros, M. Current state of technology of fuel cell power systems for autonomous underwater vehicles. Energies 2014, 7, 4676–4693. [Google Scholar] [CrossRef]
- Alter, S.H. Wave power. Nature 1974, 249, 720–724. [Google Scholar] [CrossRef]
- Lément, A.; McCullen, P.; Falcão, A.; Fiorentino, A.; Gardner, F.; Hammarlund, K.; Lemonis, G.; Lewis, T.; Nielsen, K.; Petroncini, S. Wave energy in Europe: Current status and perspectives. Renew. Sustain. Energy Rev. 2002, 6, 405–431. [Google Scholar] [CrossRef]
- Egnier, E. Oil and energy price volatility. Energy Econ. 2007, 29, 405–427. [Google Scholar] [CrossRef]
- Ntonio, F.O. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar]
- Rew, B.; Plummer, A.R.; Sahinkaya, M.N. A review of wave energy converter technology. J. Power Energy 2009, 223, 887–902. [Google Scholar]
- Alcão, A.F.O.; Henriques, J.C.C. Oscillating-water-column wave energy converters and air turbines: A review. Renew. Energy 2016, 85, 1391–1424. [Google Scholar]
- Ópez, I.; Andreu, J.; Ceballos, S.; de Alegría, I.M.; Kortabarria, I. Review of wave energy technologies and the necessary power-equipment. Renew. Sustain. Energy Rev. 2013, 27, 413–434. [Google Scholar]
- Iles, L.F. A Permanent-Magnet Linear Generator Wave Energy Converter for Low Power Ocean Sensors. Master’s Thesis, Oregon State University, Corvallis, OR, USA, 27 June 2017. [Google Scholar]
- Lean Energy from Ocean Waves-Ongoing Projects. Available online: https://wello.eu (accessed on 24 May 2019).
- Racco, G.; Cagninei, A.; Giorcelli, E.; Mattiazzo, G.; Poggi, D.; Raffero, M. Experimental validation of the ISWEC wave to PTO model. Ocean Eng. 2016, 120, 40–51. [Google Scholar]
- Ave for Energy Srl R&D DEVELOPMENT. Available online: http://www.waveforenergy.com/tech/iswec (accessed on 24 May 2019).
- Power PRODUCT DEVELOPMENT. Available online: https://columbiapwr.com/product-development/ (accessed on 24 May 2019).
- U.S. Department of Energy Awards $25 Million for Next-Generation Marine Energy Research Projects. Available online: https://www.energy.gov/articles/us-department-energy-awards-25-million-next-generation-marine-energy-research-projects (accessed on 24 May 2019).
- Orbach, A.; Fjetland, K.B.; Hestetun, G.V.; Impelluso, T.J. Gyroscopic Wave Energy Generator for Fish Farms and Rigs. In Proceedings of the ASME 2018 International Mechanical Engineering Congress and Exposition, Pittsburgh, PA, USA, 9–15 November 2018; American Society of Mechanical Engineers: New York, NY, USA, 2018; p. V06BT08A021. [Google Scholar]
- Usu, E.; Onea, F. A review of the technologies for wave energy extraction. Clean Energy 2018, 2, 10–19. [Google Scholar]
- Ang, L.; Engström, J.; Göteman, M.; Isberg, J. Constrained optimal control of a point absorber wave energy converter with linear generator. J. Renew. Sustain. Energy 2015, 7, 043127. [Google Scholar]
- Bdelkhalik, O.; Zou, S. Control of small two-body heaving wave energy converters for ocean measurement applications. Renew. Energy 2019, 132, 587–595. [Google Scholar] [CrossRef]
- Roducts of OPT. Available online: https://www.oceanpowertechnologies.com/product (accessed on 20 April 2019).
- Einstein, A.; Fredrikson, G.; Parks, M.J.; Nielsen, K. AquaBuOY-the offshore wave energy converter numerical modeling and optimization. In Proceedings of the Oceans’ 04 MTS/IEEE Techno-Ocean’04 (IEEE Cat. No. 04CH37600), Kobe, Japan, 9–12 November 2004; Volume 4, pp. 1854–1859. [Google Scholar]
- Un, C.; Luo, Z.; Shang, J.; Lu, Z.; Zhu, Y.; Wu, G. Design and Numerical Analysis of a Novel Counter-Rotating Self-Adaptable Wave Energy Converter Based on CFD Technology. Energies 2018, 11, 694. [Google Scholar]
- Ong, D.; Shang, J.; Luo, Z.; Sun, C.; Wu, W. Energy Efficiency Analysis of Multi-Type Floating Bodies for a Novel Heaving Point Absorber with Application to Low-Power Unmanned Ocean Device. Energies 2018, 11, 3282. [Google Scholar]
- Ie, O.; Li, B.; Yan, Q. Computational and experimental study on dynamics behavior of a bionic underwater robot with multi-flexible caudal fins. Ind. Robot.-Int. J. Robot. Res. Appl. 2018, 45, 267–274. [Google Scholar]
- Olkoff, S.W. Robotics and Power Measurements of the RoboTuna. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1999. [Google Scholar]
- Iorgi, G.; Ringwood, J.V. Computationally efficient nonlinear Froude–Krylov force calculations for heaving axisymmetric wave energy point absorbers. J. Ocean Eng. Mar. Energy 2017, 3, 21–33. [Google Scholar] [CrossRef]
- Iorgi, G.; Ringwood, J.V. Analytical formulation of nonlinear froude-krylov forces for surging-heaving-pitching point absorbers. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering. American Society of Mechanical Engineers, Madrid, Spain, 17–22 June 2018; p. V010T09A036. [Google Scholar]
- Wamp Group. Ocean Wave Modeling; Springer Science & Business Media: Berlin, Germany, 1985. [Google Scholar]
- Ang, X.; Song, B.; Wang, P.; Sun, C. Hydrofoil optimization of underwater glider using Free-Form Deformation and surrogate-based optimization. Int. J. Naval Archit. Ocean Eng. 2018, 6, 730–740. [Google Scholar]
- Sa, K.; Arshad, M.R.; Ishak, S. A hybrid-driven underwater glider model, hydrodynamics estimation, and an analysis of the motion control. Ocean Eng. 2014, 81, 111–129. [Google Scholar]
- Unus, A.C. Fluid Mechanics: Fundamentals and Applications (Si Units); Tata McGraw Hill Education Private Limited: New York, NY, USA, 2010. [Google Scholar]
- Ebouillat, S.; Liksonov, D. Fluid–structure interaction in partially filled liquid containers: A comparative review of numerical approaches. Comput. Fluids 2010, 39, 739–746. [Google Scholar] [CrossRef]
- Nup, K.C.; Lee, Y.H.; Thapa, B. CFD study on prediction of vortex shedding in draft tube of Francis turbine and vortex control techniques. Renew. Energy 2016, 86, 1406–1421. [Google Scholar]
- Einer-Gundersen, D.H. A novel flexible foil vertical axis turbine for river, ocean, and tidal applications. Appl. Energy 2015, 151, 60–66. [Google Scholar] [CrossRef]
- Dhikari, R.; Vaz, J.; Wood, D. Cavitation inception in crossflow hydro turbines. Energies 2016, 9, 237. [Google Scholar] [CrossRef]
- Atsushima, K.; Murayama, M.; Nakahashi, K. Unstructured dynamic mesh for large movement and deformation. In Proceedings of the 40th AIAA Aerospace Sciences Meeting & Exhibit, Reno, NV, USA, 14–17 January 2002; p. 122. [Google Scholar]
- Rawczewicz, M. Micro Ocean Renewable Energy. Available online: http://www.ericgreeneassociates.com/images/Micro_Ocean_Renewable_Energy.pdf (accessed on 20 April 2019).
- Wu, G.; Lu, Z.; Luo, Z.; Shang, J.; Sun, C.; Zhu, Y. Experimental Analysis of a Novel Adaptively Counter-Rotating Wave Energy Converter for Powering Drifters. J. Mar. Sci. Eng. 2019, 7, 171. [Google Scholar] [CrossRef]
- Atsushita, D.; Okuma, K.; Watanabe, S.; Furukawa, A. Simplified structure of ducted Darrieus-type hydro turbine with narrow intake for extra-low head hydropower utilization. J. Fluid Sci. Technol. 2008, 3, 387–397. [Google Scholar] [CrossRef][Green Version]
- Himokawa, K.; Furukawa, A.; OKuma, K.; Matsushita, D.; Watanabe, S. Side-wall effect of runner casing on performance of Darrieus-type hydro turbine with inlet nozzle for extra-low head utilization. Sci. China Ser. E Technol. Sci. 2010, 53, 93–99. [Google Scholar] [CrossRef]

























© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, C.; Shang, J.; Luo, Z.; Lu, Z.; Wu, G.; Zhu, Y. Using Flexible Blades to Improve the Performance of Novel Small-Scale Counter-Rotating Self-Adaptable Wave Energy Converter for Unmanned Marine Equipment. J. Mar. Sci. Eng. 2019, 7, 223. https://doi.org/10.3390/jmse7070223
Sun C, Shang J, Luo Z, Lu Z, Wu G, Zhu Y. Using Flexible Blades to Improve the Performance of Novel Small-Scale Counter-Rotating Self-Adaptable Wave Energy Converter for Unmanned Marine Equipment. Journal of Marine Science and Engineering. 2019; 7(7):223. https://doi.org/10.3390/jmse7070223
Chicago/Turabian StyleSun, Chongfei, Jianzhong Shang, Zirong Luo, Zhongyue Lu, Guoheng Wu, and Yiming Zhu. 2019. "Using Flexible Blades to Improve the Performance of Novel Small-Scale Counter-Rotating Self-Adaptable Wave Energy Converter for Unmanned Marine Equipment" Journal of Marine Science and Engineering 7, no. 7: 223. https://doi.org/10.3390/jmse7070223
APA StyleSun, C., Shang, J., Luo, Z., Lu, Z., Wu, G., & Zhu, Y. (2019). Using Flexible Blades to Improve the Performance of Novel Small-Scale Counter-Rotating Self-Adaptable Wave Energy Converter for Unmanned Marine Equipment. Journal of Marine Science and Engineering, 7(7), 223. https://doi.org/10.3390/jmse7070223