Reduction of Hydrodynamic Noise of 3D Hydrofoil with Spanwise Microgrooved Surfaces Inspired by Sharkskin


Abstract
:1. Introduction
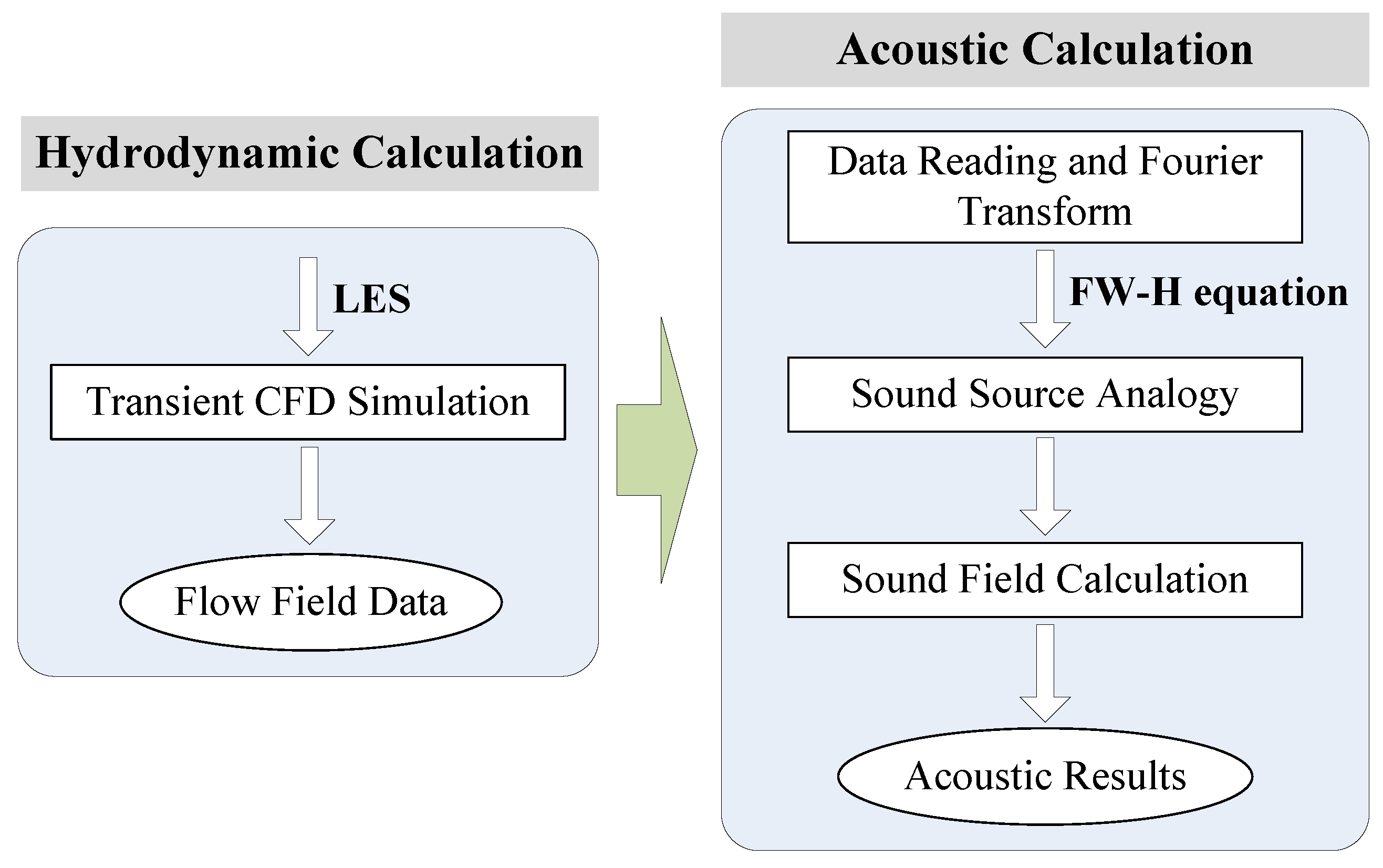
2. Computational Methods
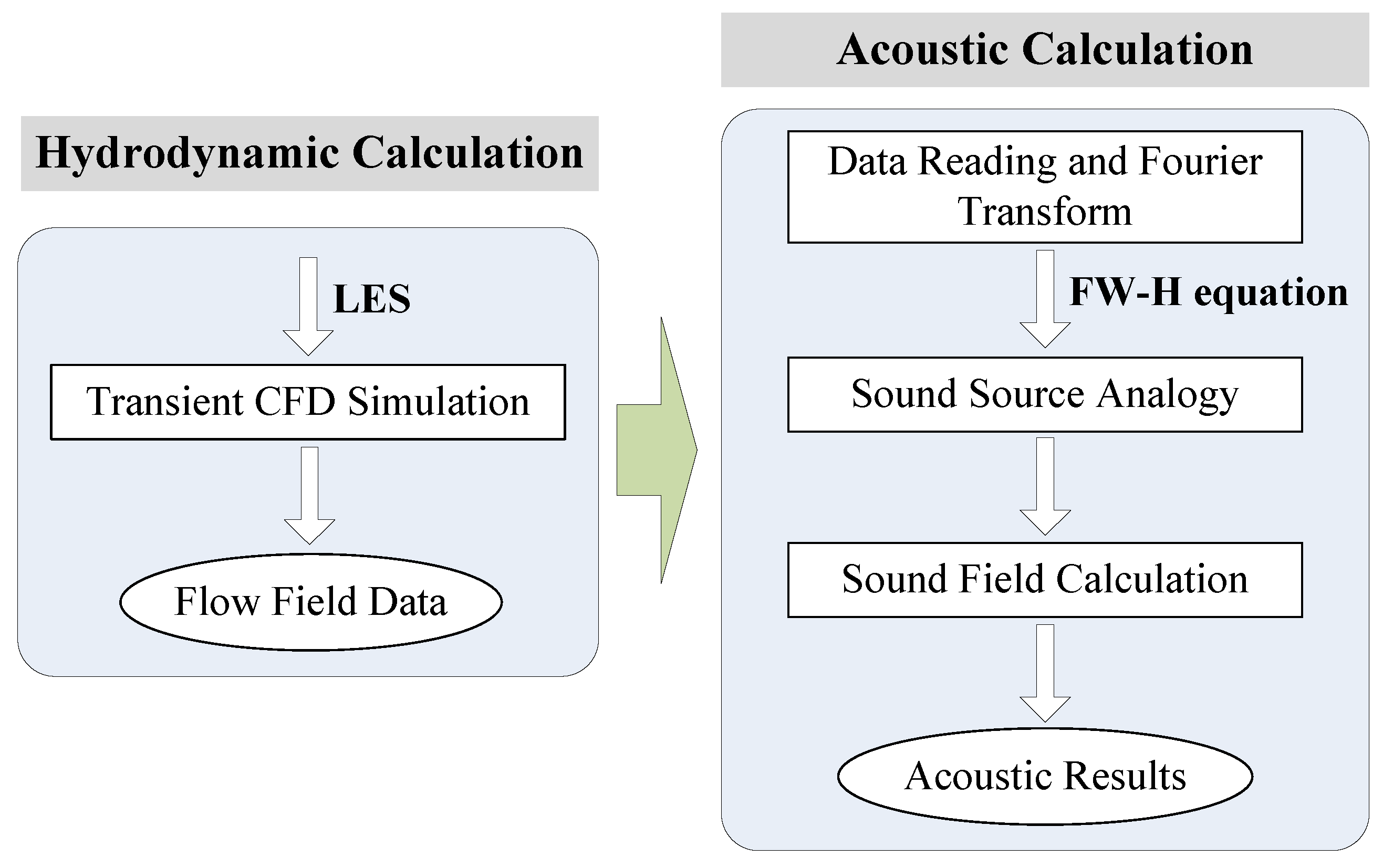
2.1. Large Eddy Simulation Model
2.2. Ffowcs-Williams and Hawkings Acoustics Model
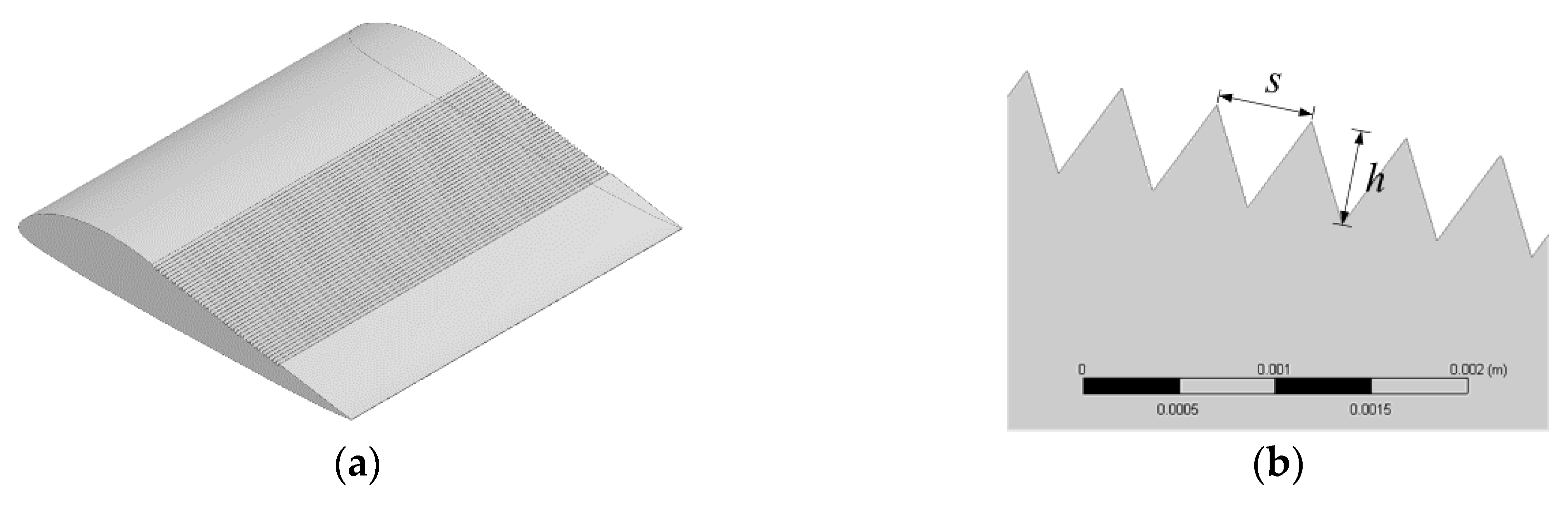
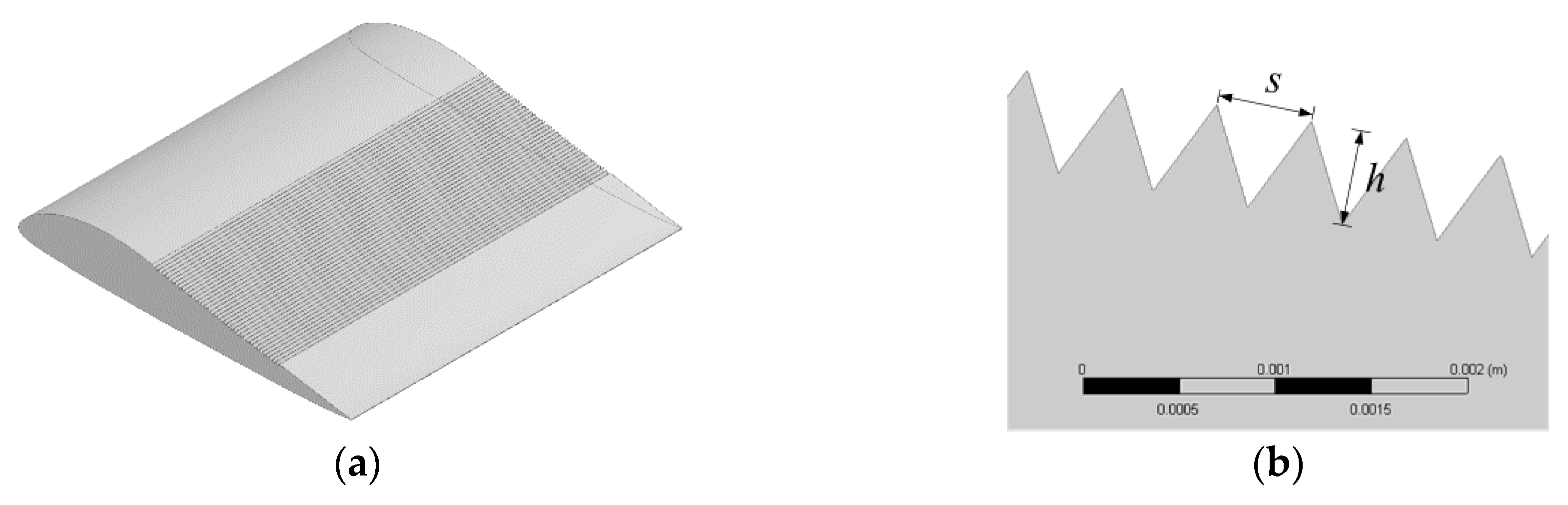
3. Design of Spanwise Microgrooves on the Surface of Hydrofoils
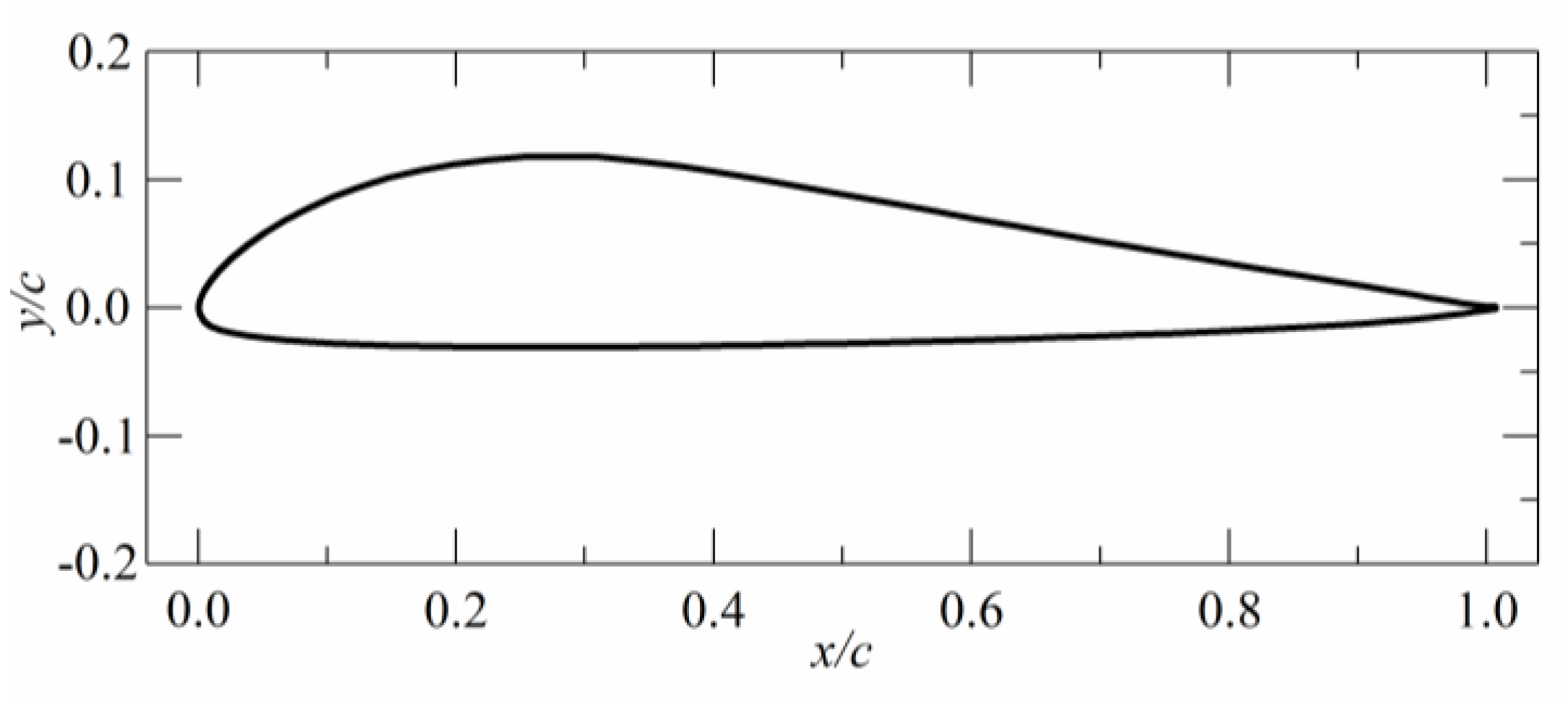
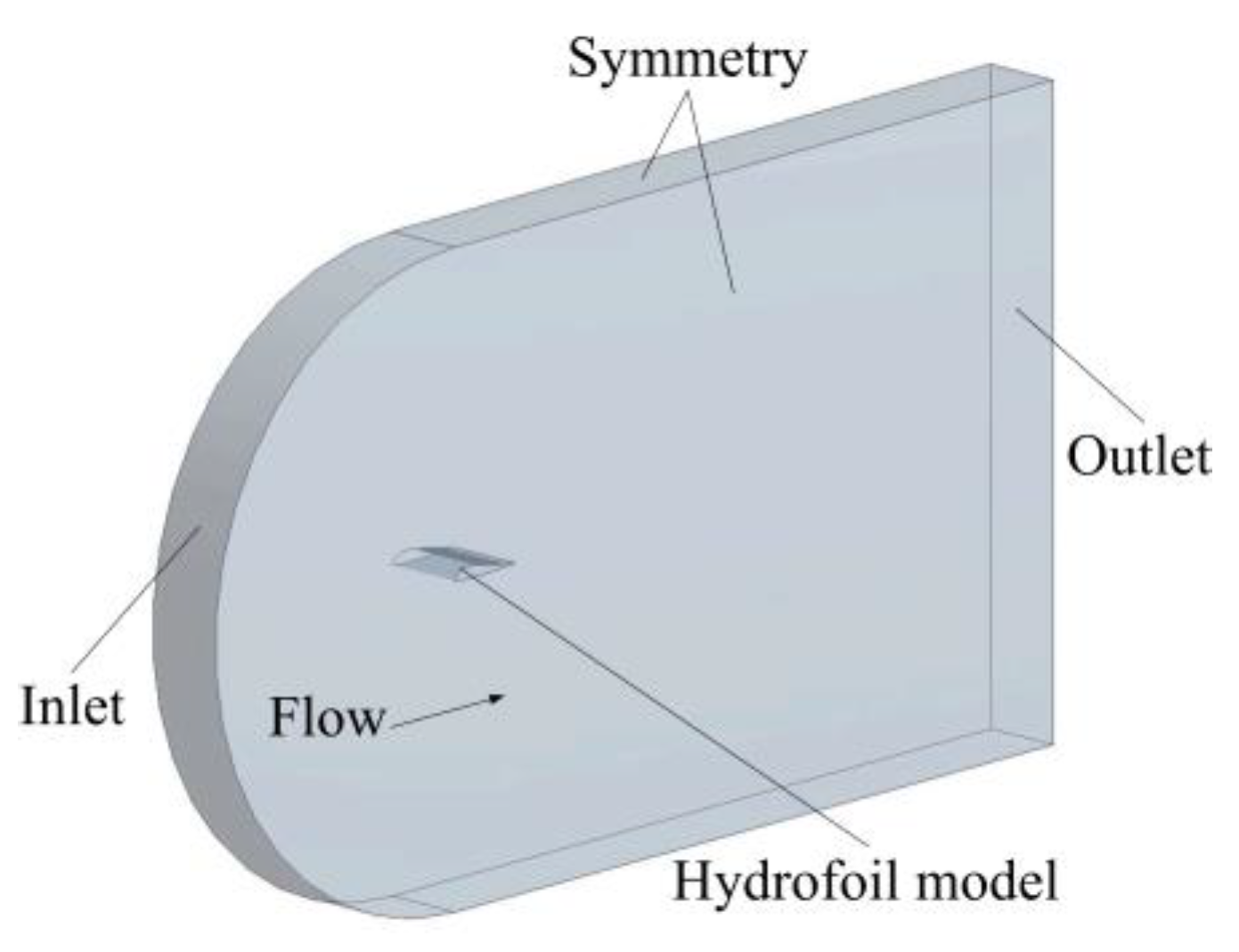
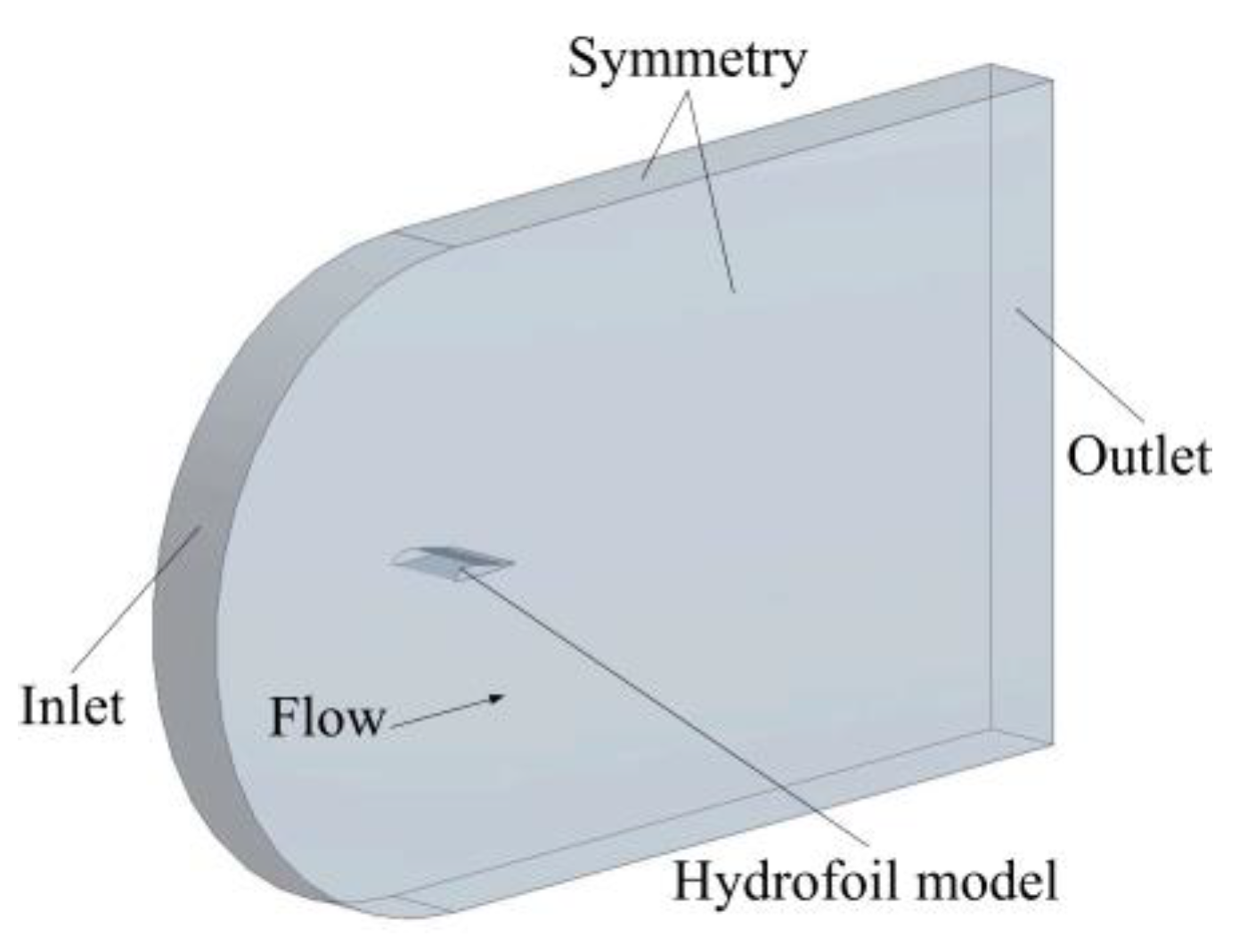
4. Computational Model
5. Numerical Method Verification and Validation
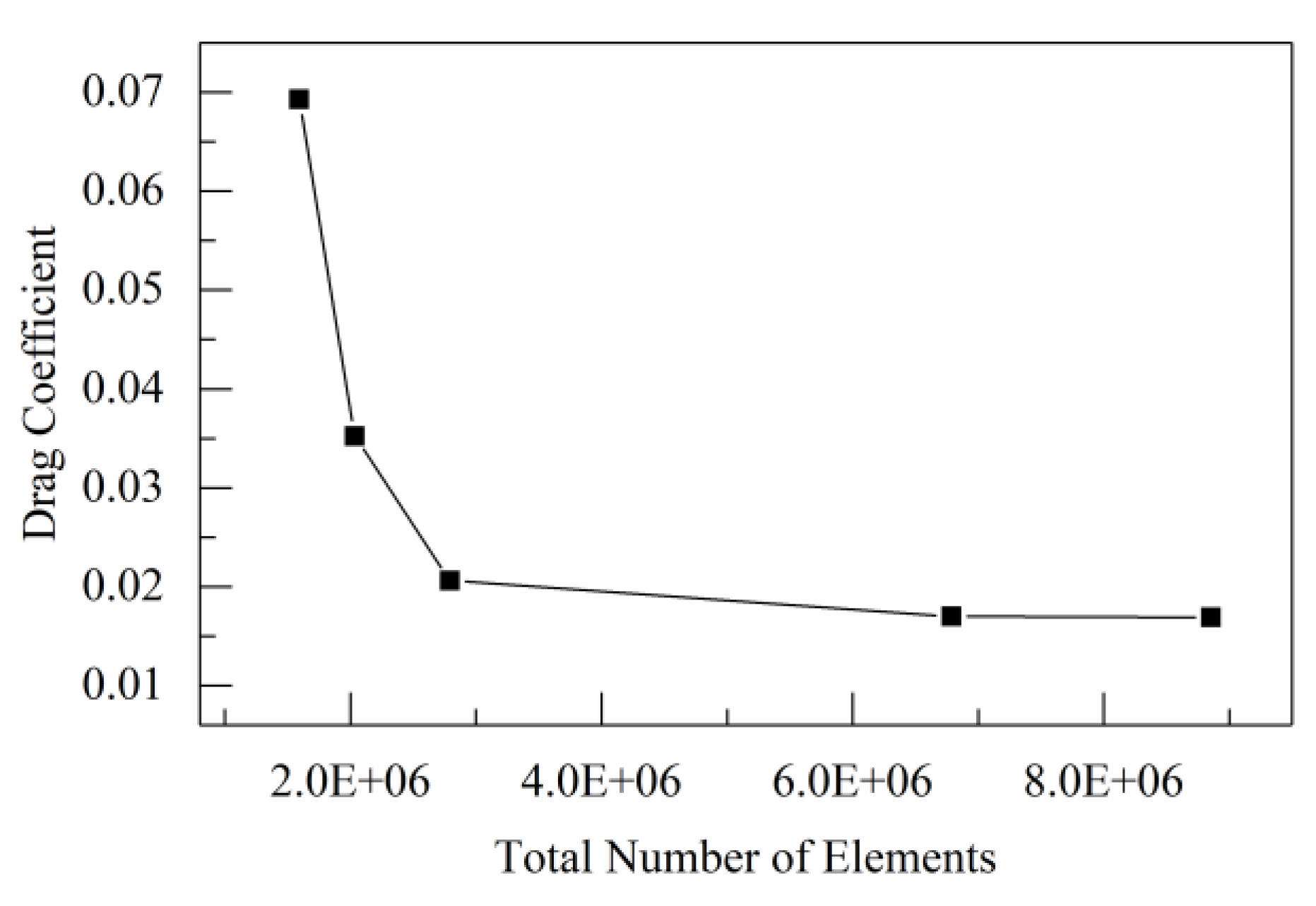
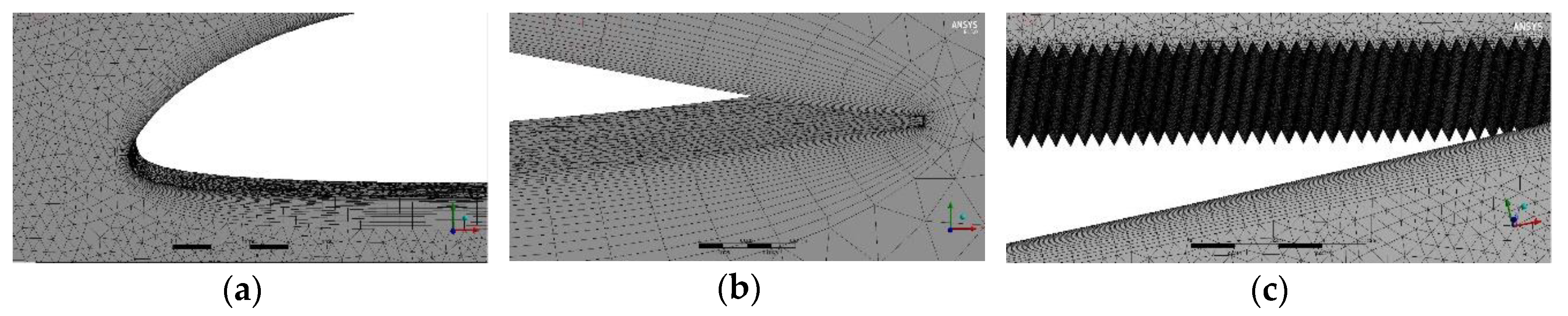
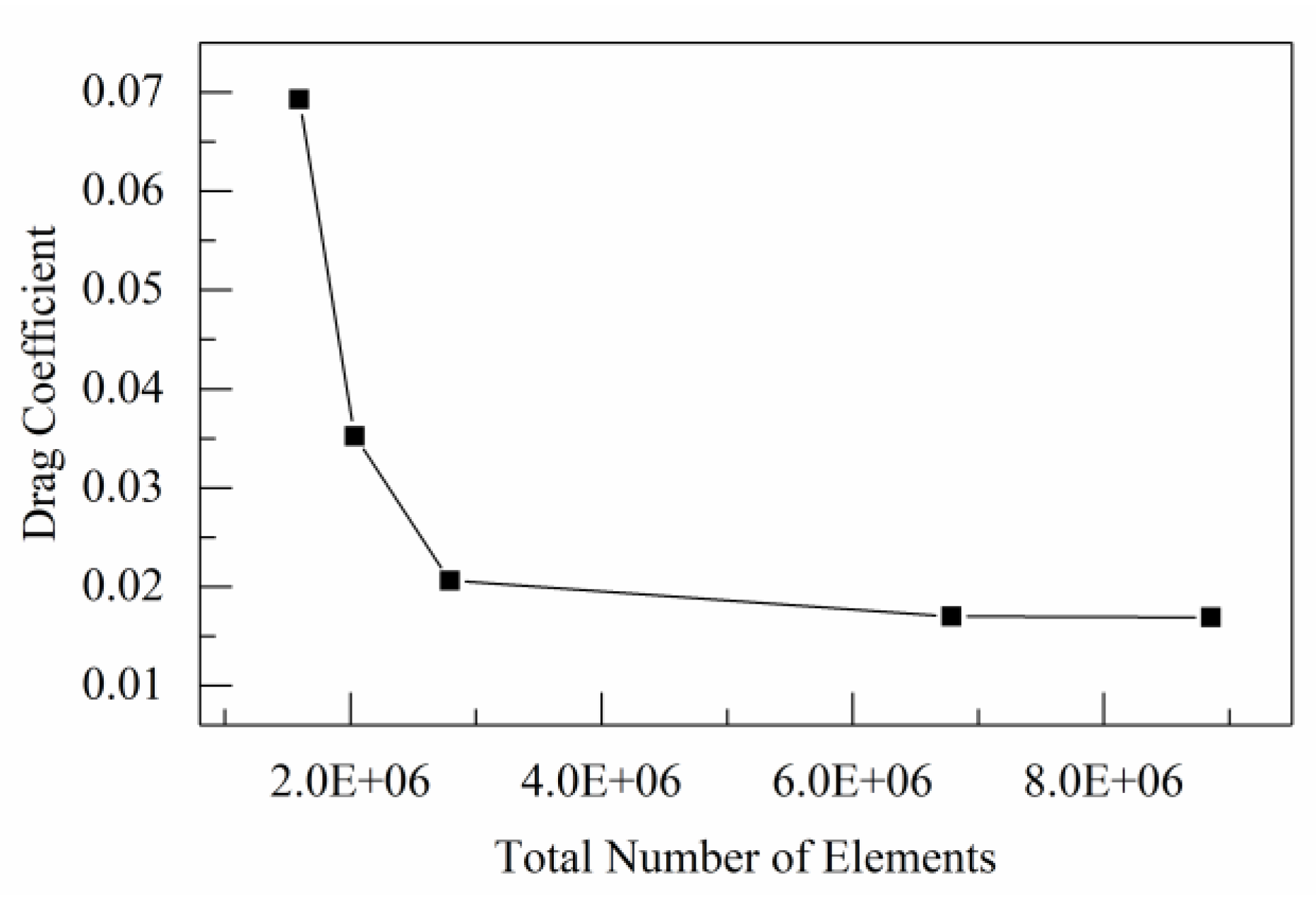
5.1. Verification
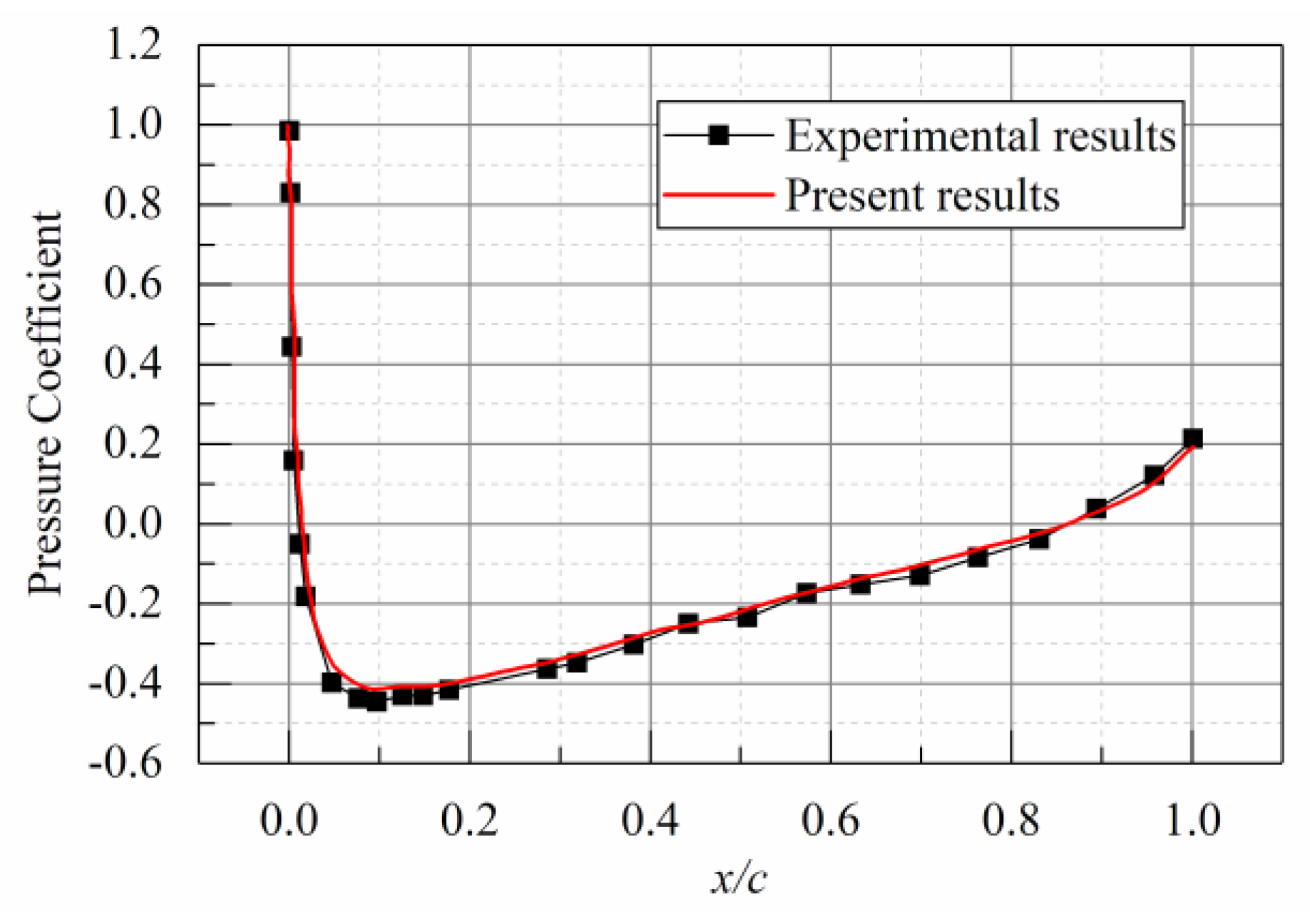
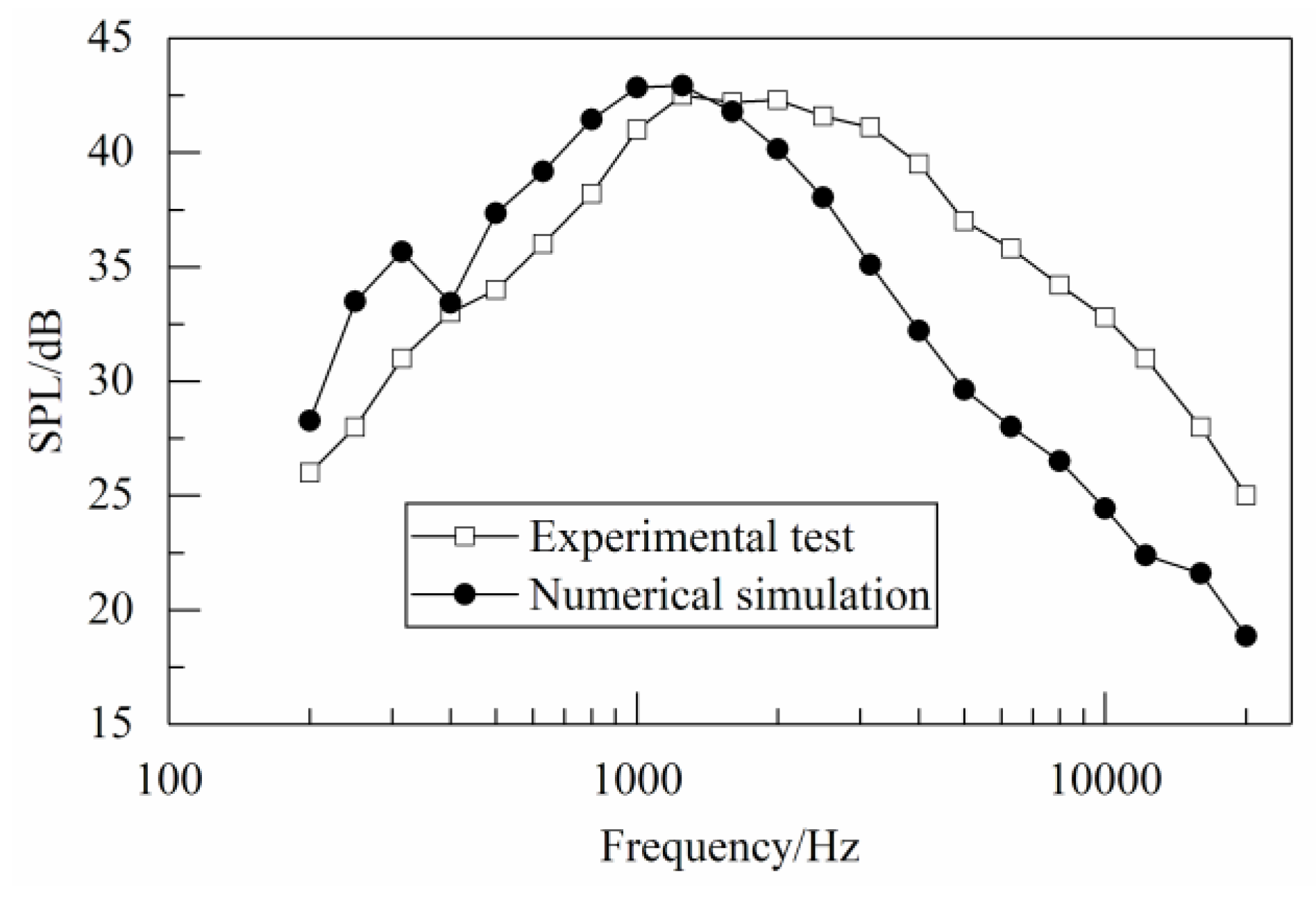
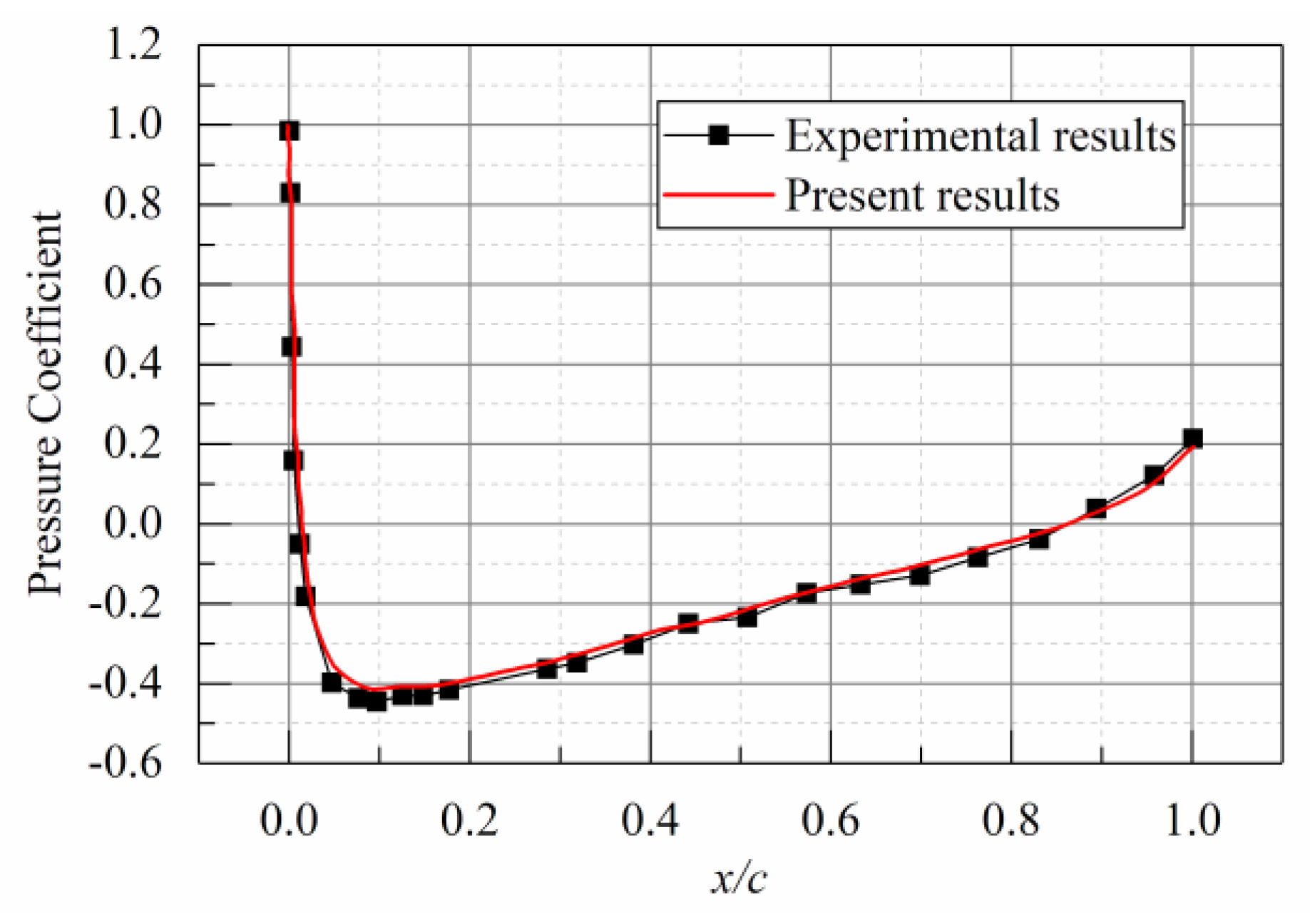
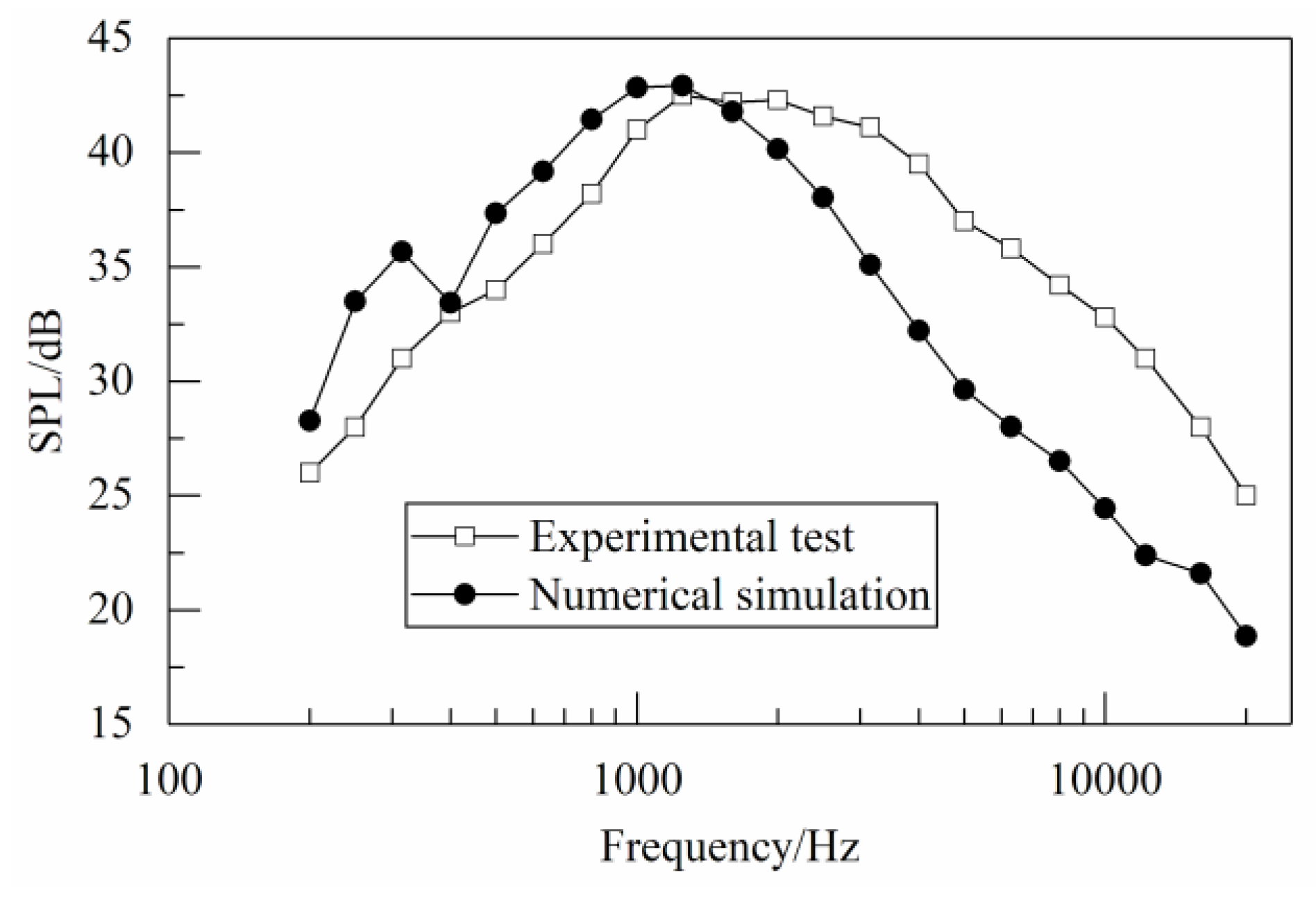
5.2. Validation
6. Results and Discussions
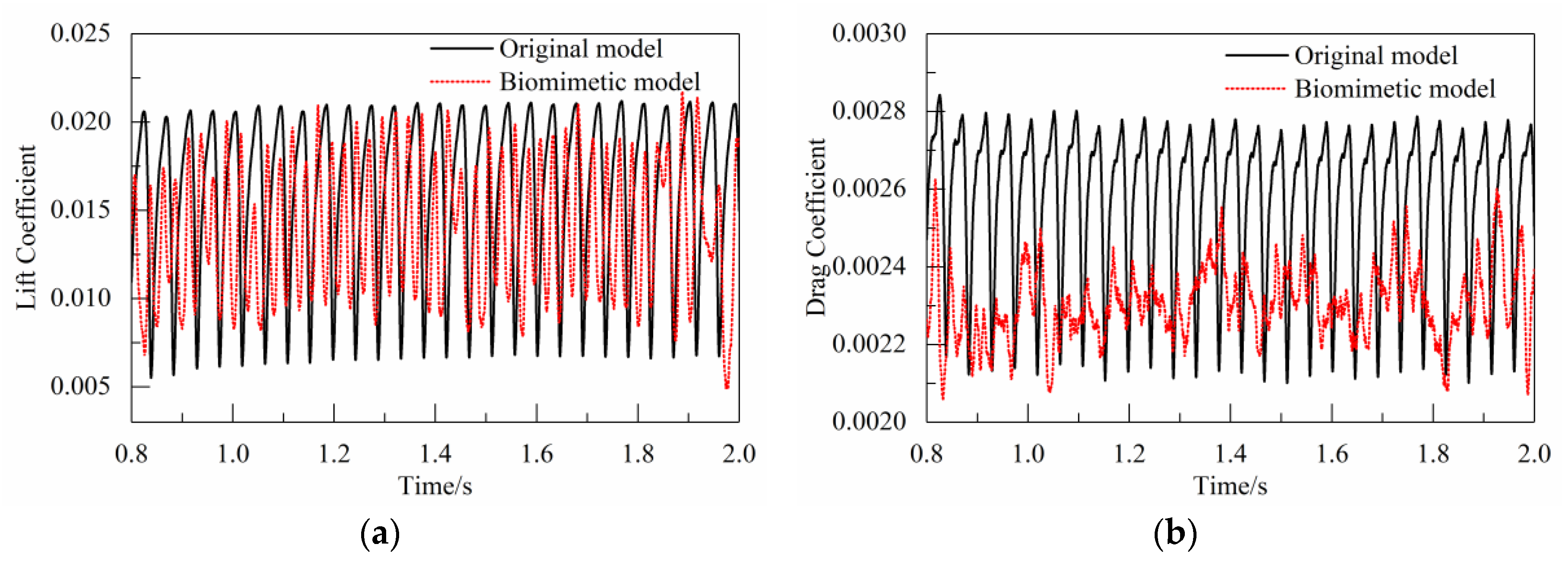
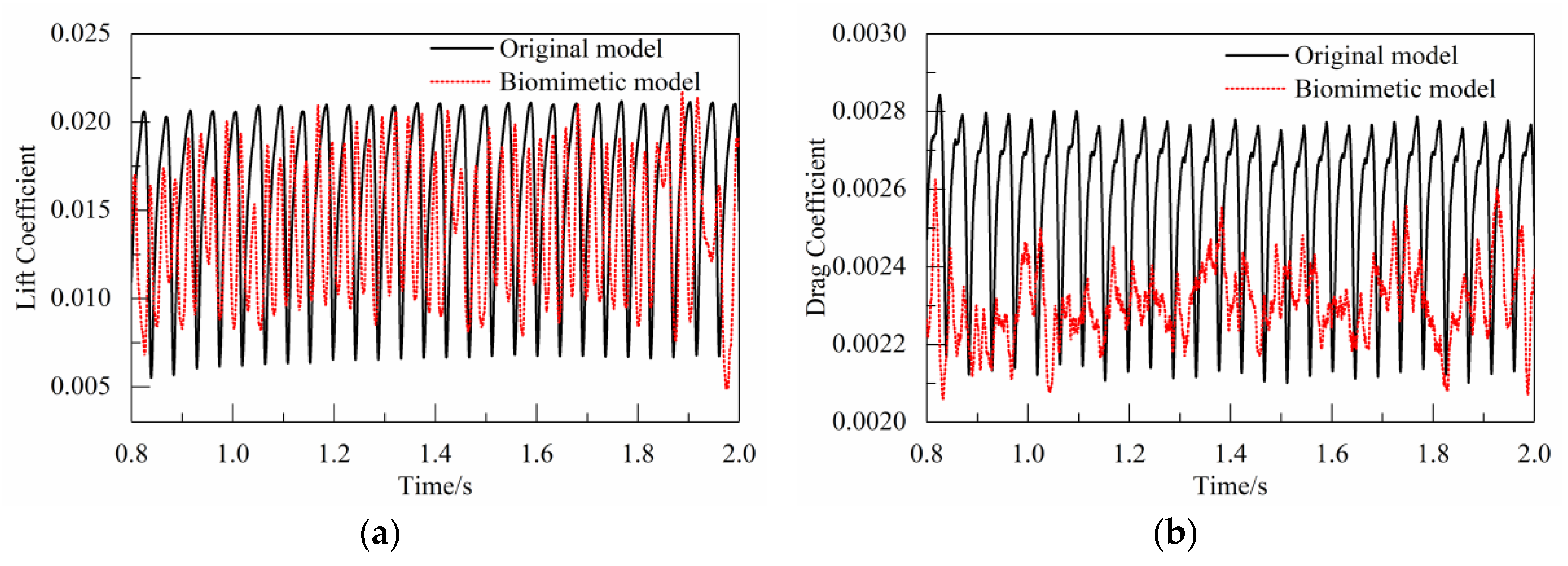
6.1. Analysis of Hydrodynamic Performance
6.2. Analysis of Near-Field Hydrodynamic Noise
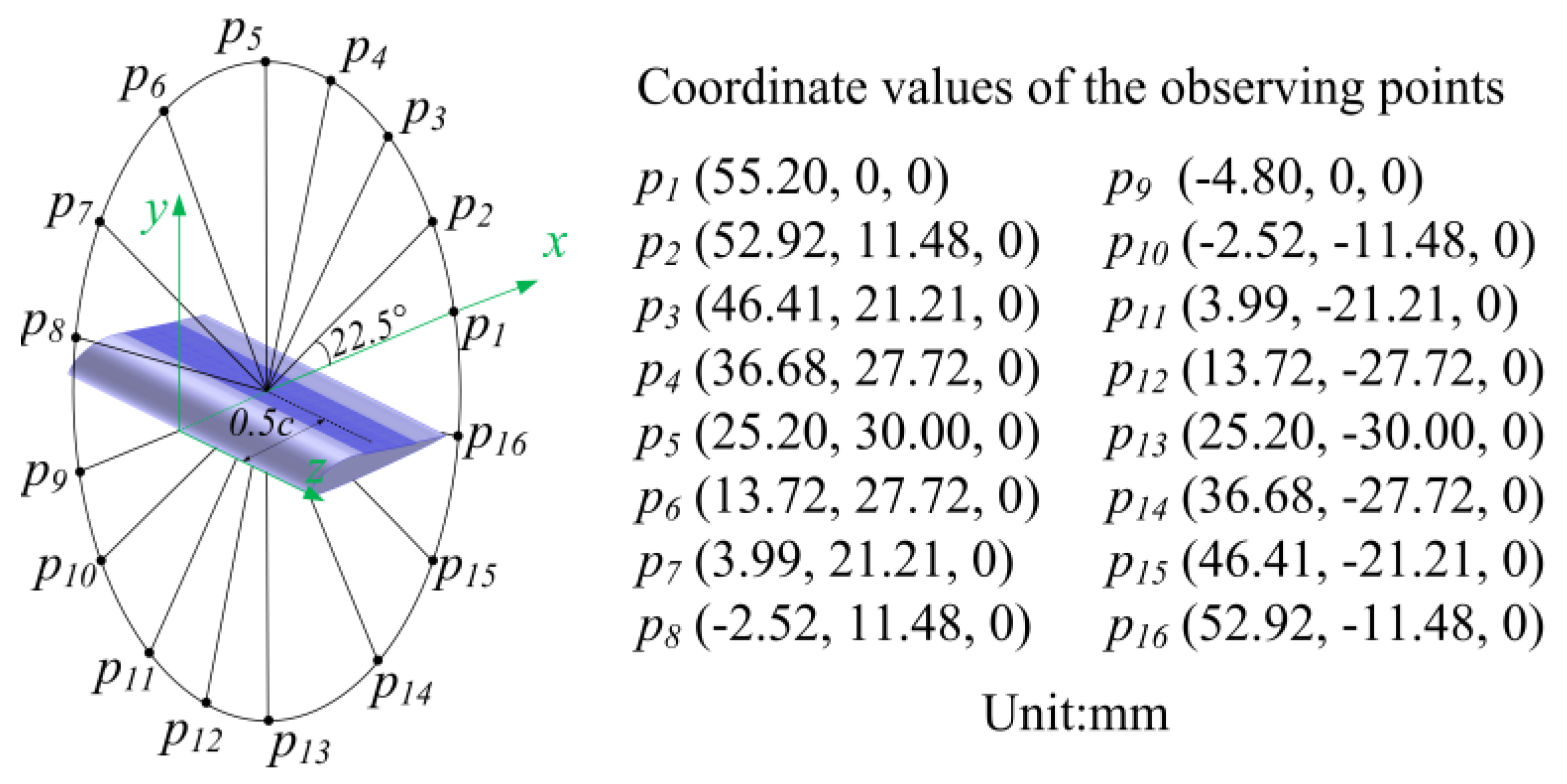
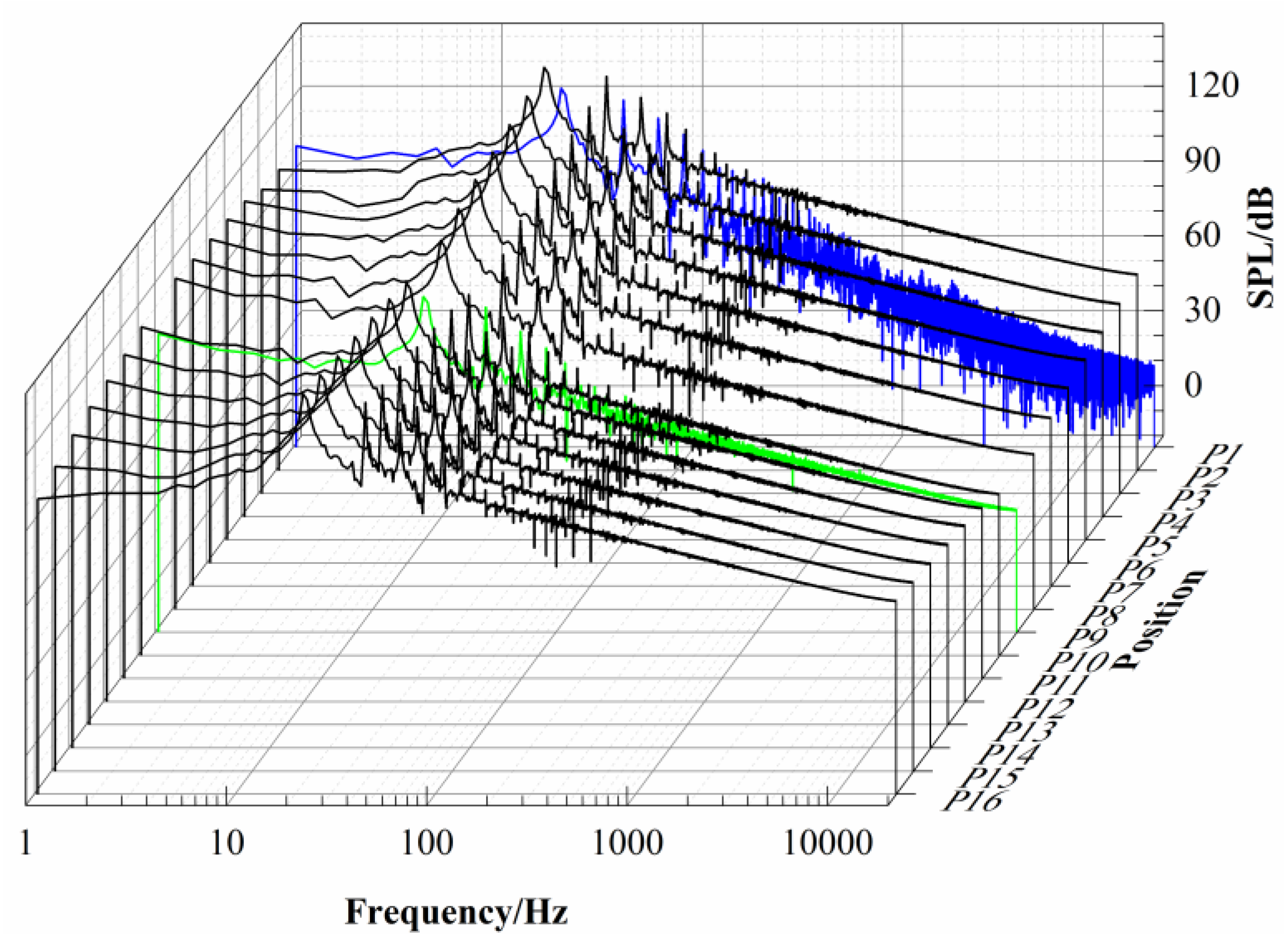
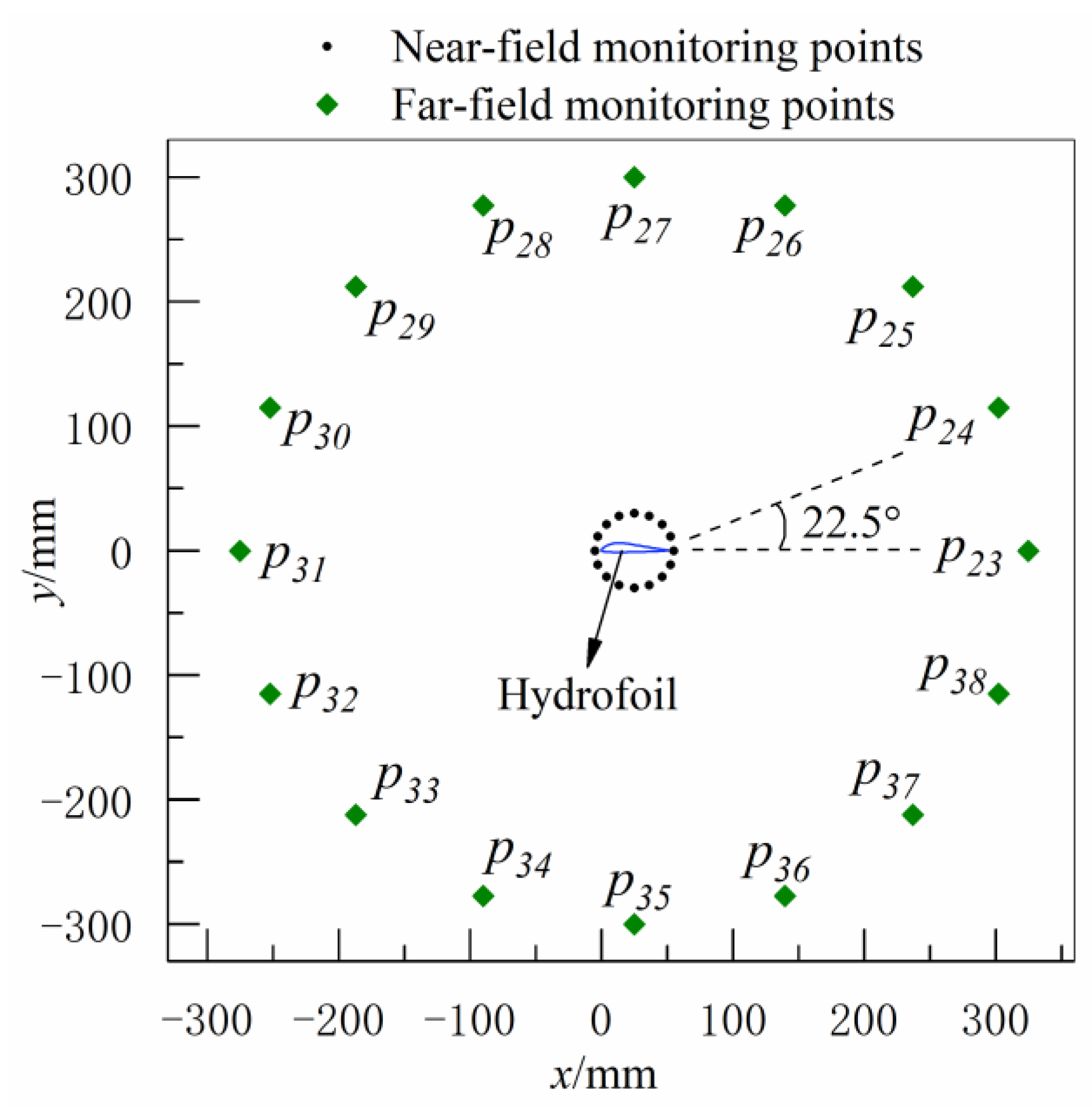
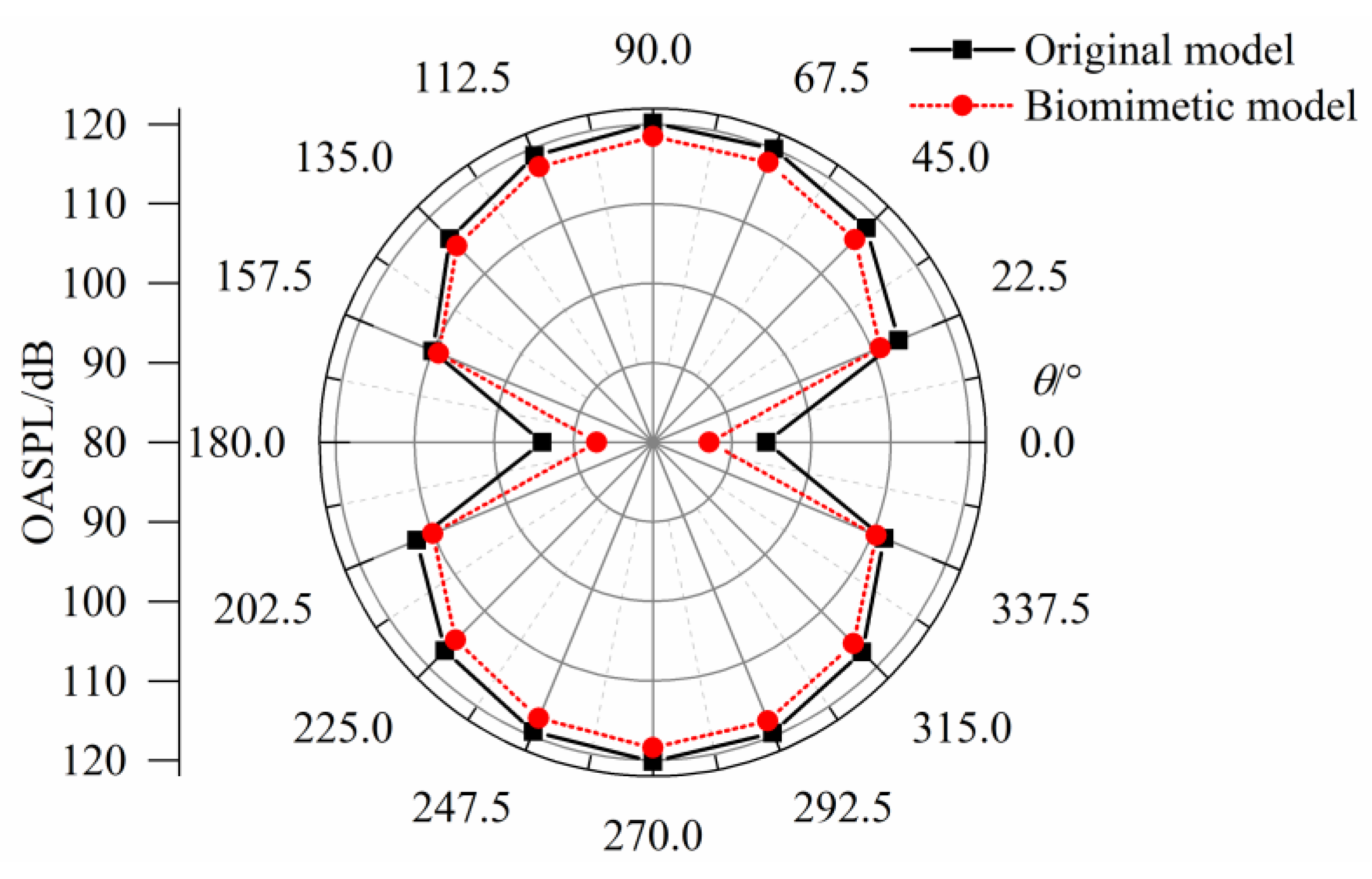
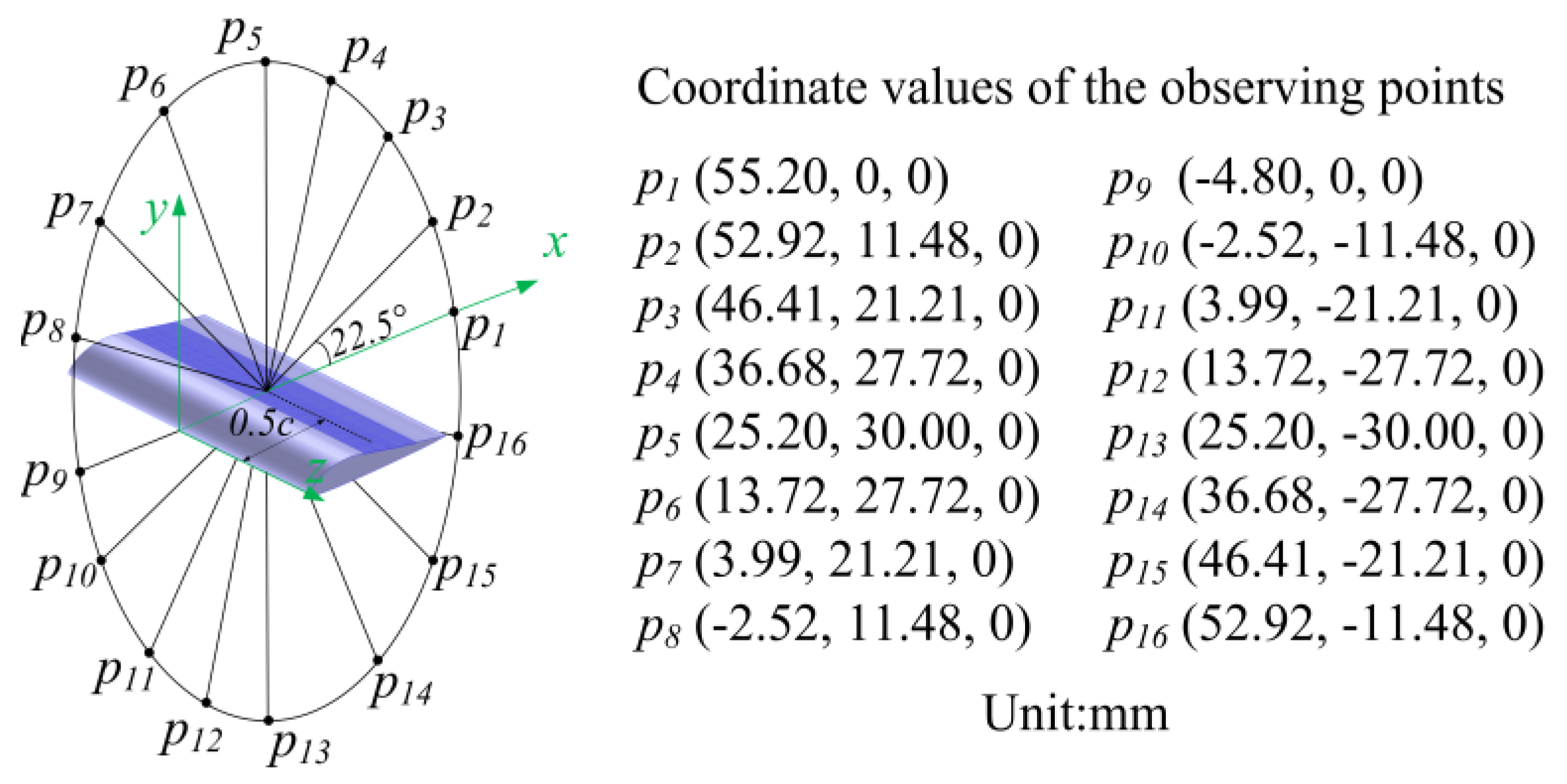
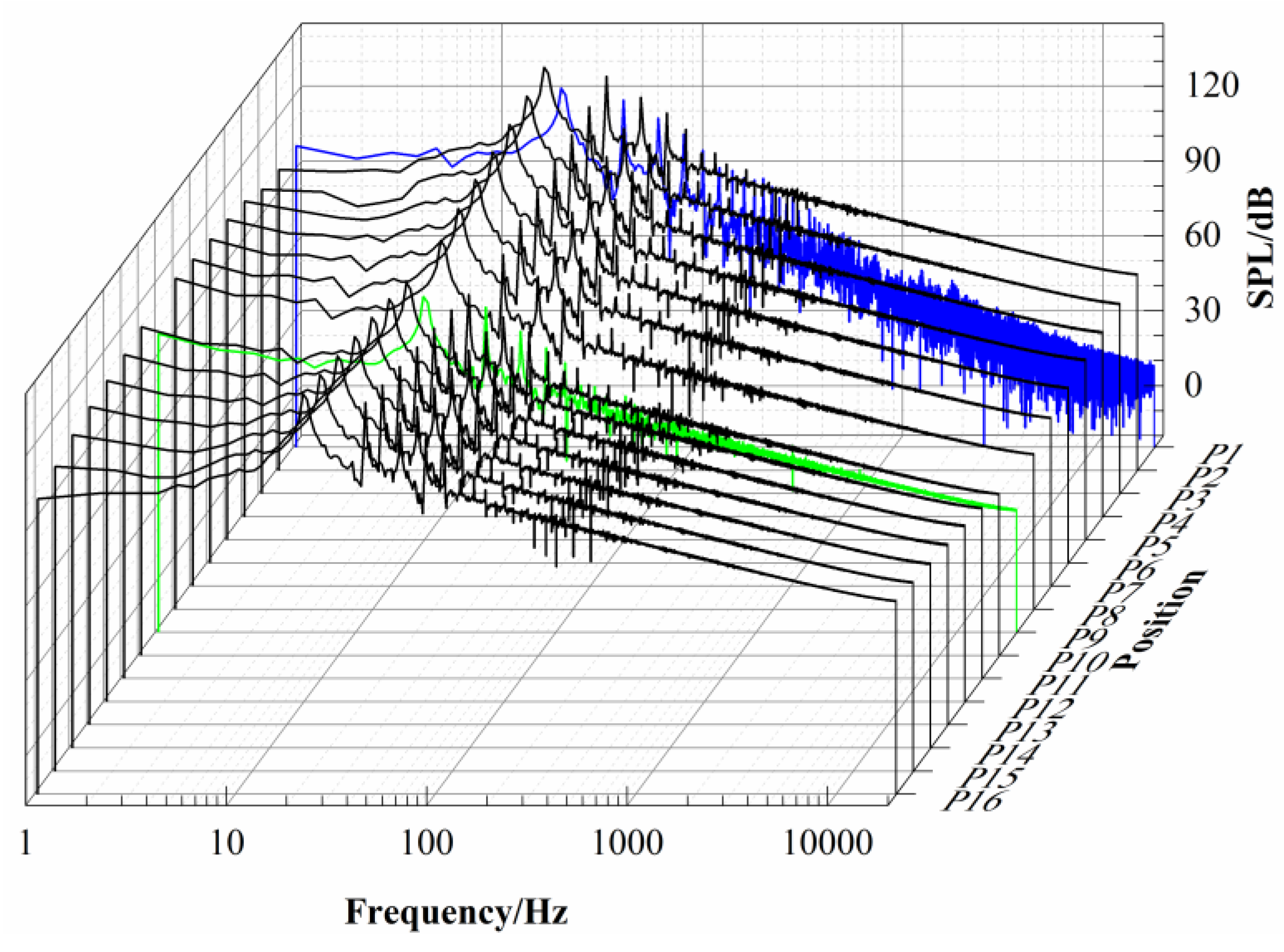
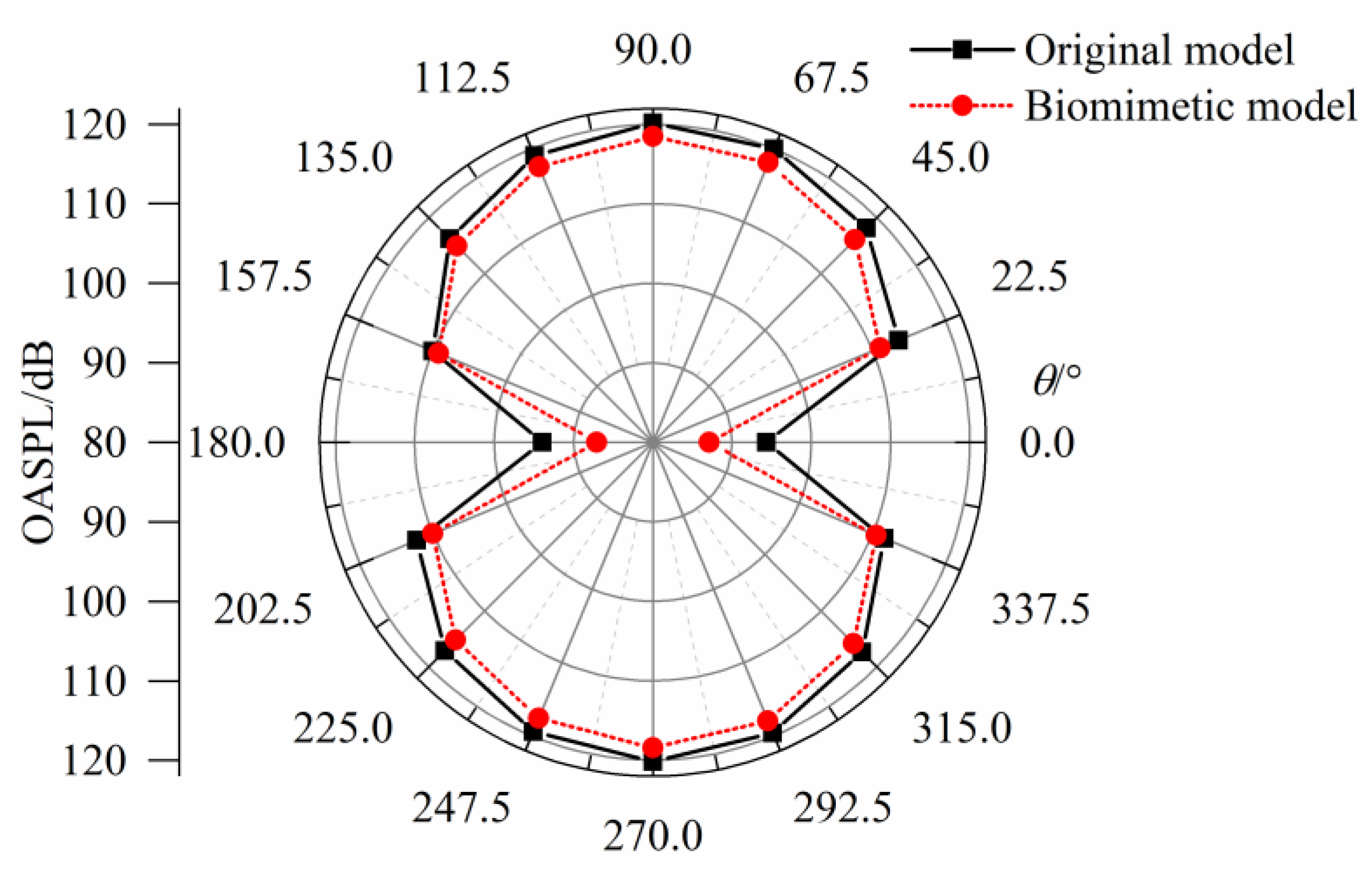
6.2.1. Noise Characteristics along the Circumferential Direction
6.2.2. Noise Characteristics along the Radial Direction
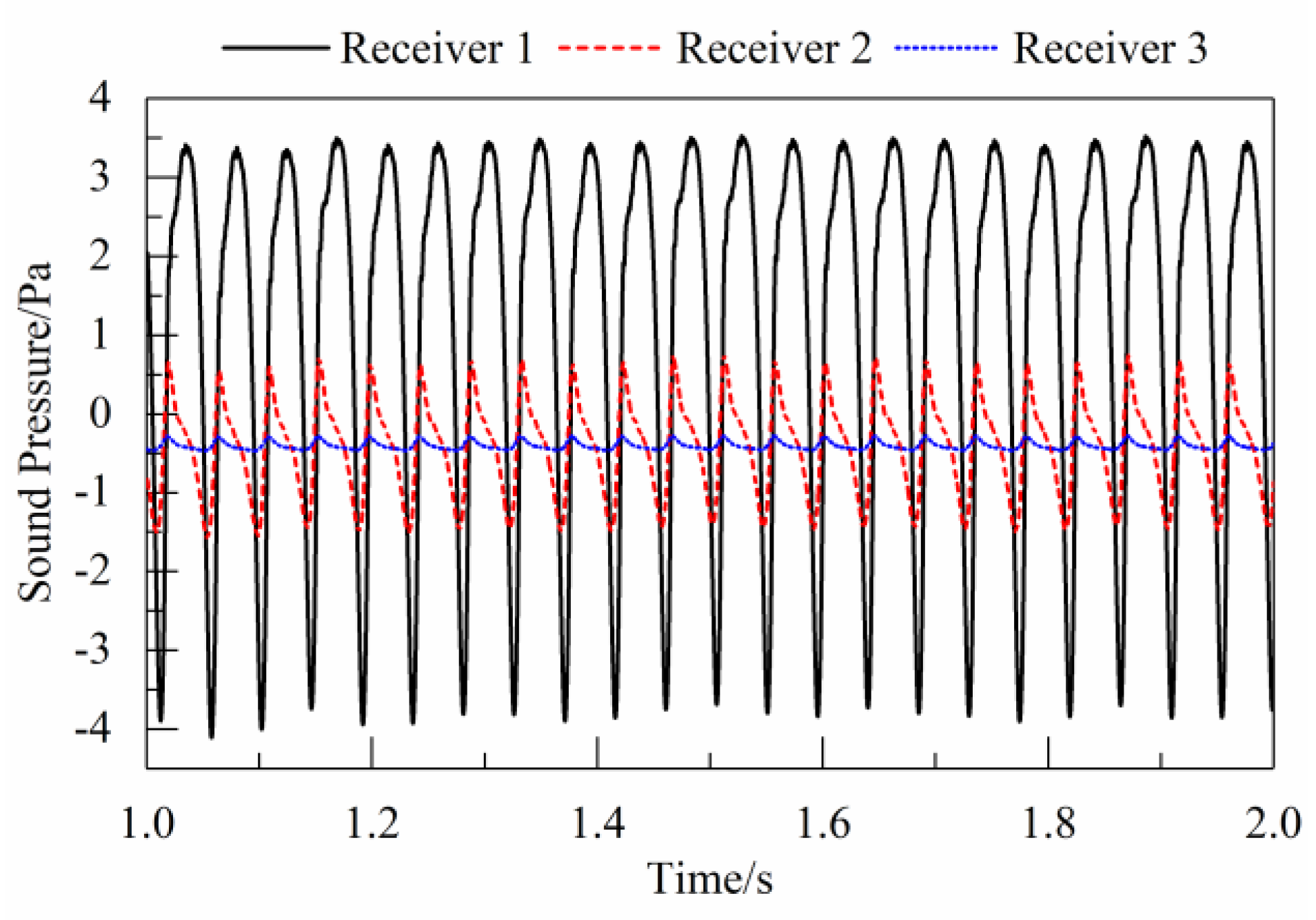
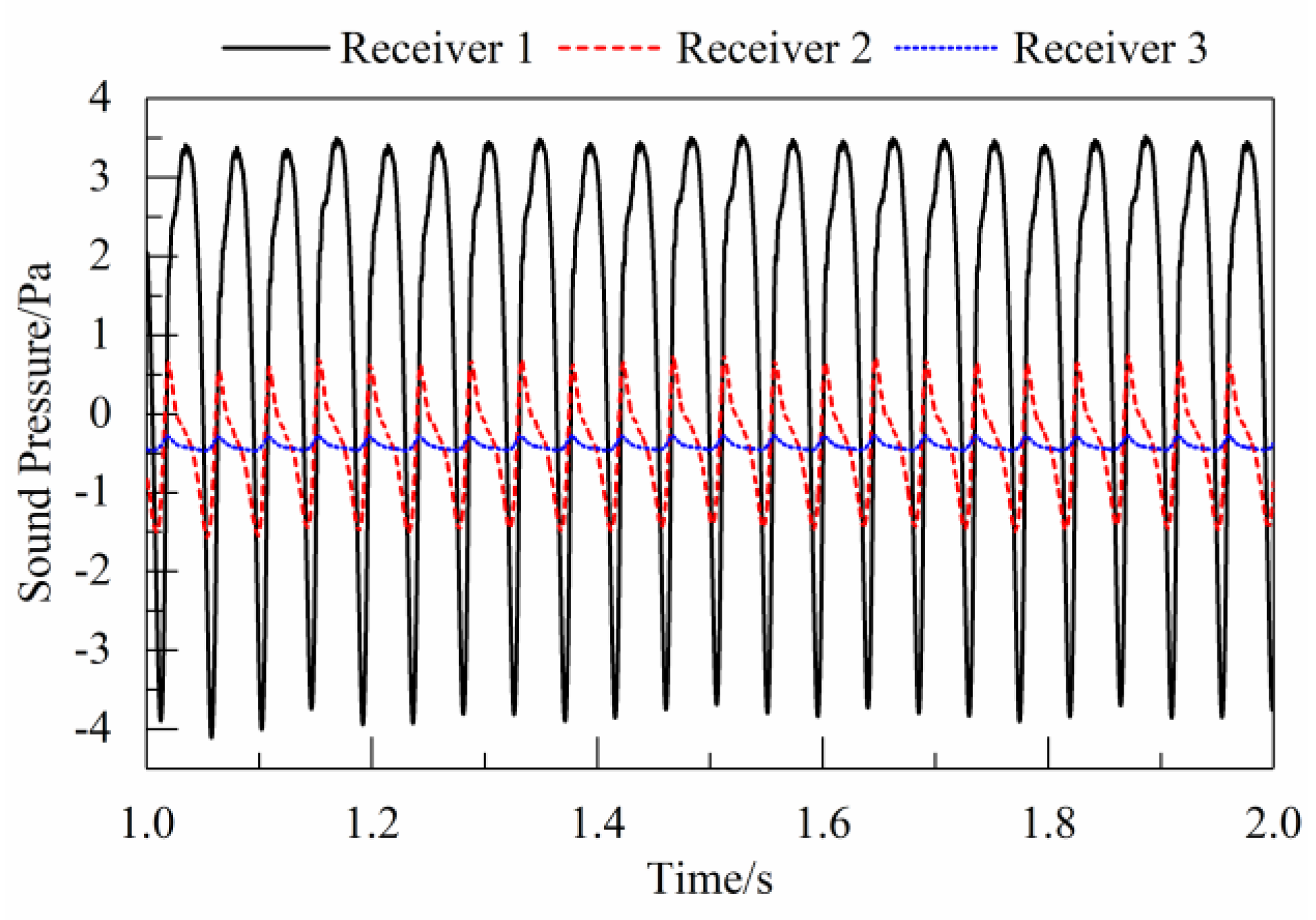
6.3. Analysis of Far-Field Hydrodynamic Noise
6.4. Noise Reduction Mechanism
7. Conclusions
- The change of the lift coefficient and drag coefficient had no obvious cycle. Compared with the characteristics of original hydrofoil, the lift coefficient of the biomimetic model was almost unchanged, and the drag coefficient of the biomimetic model was slightly decreased.
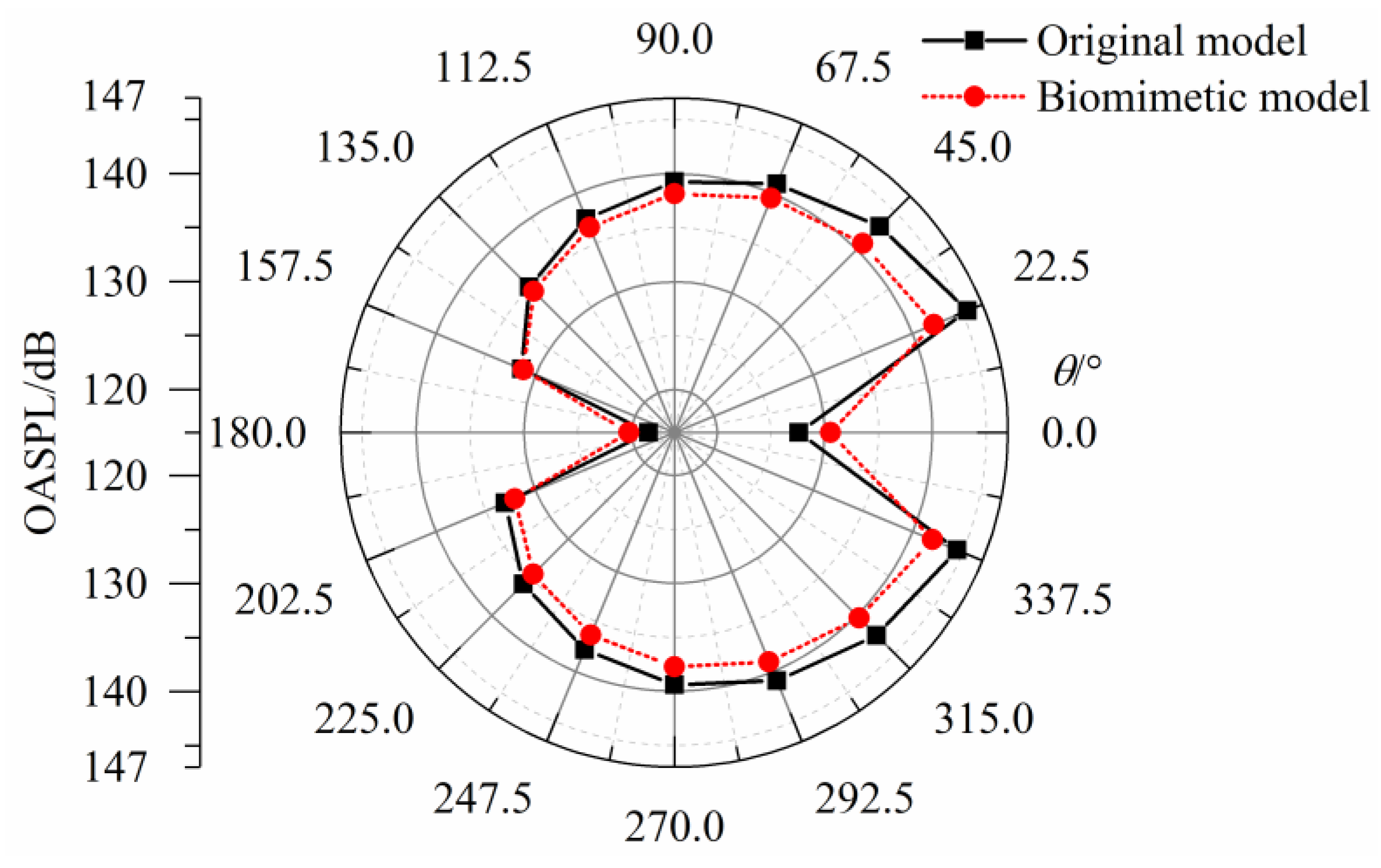
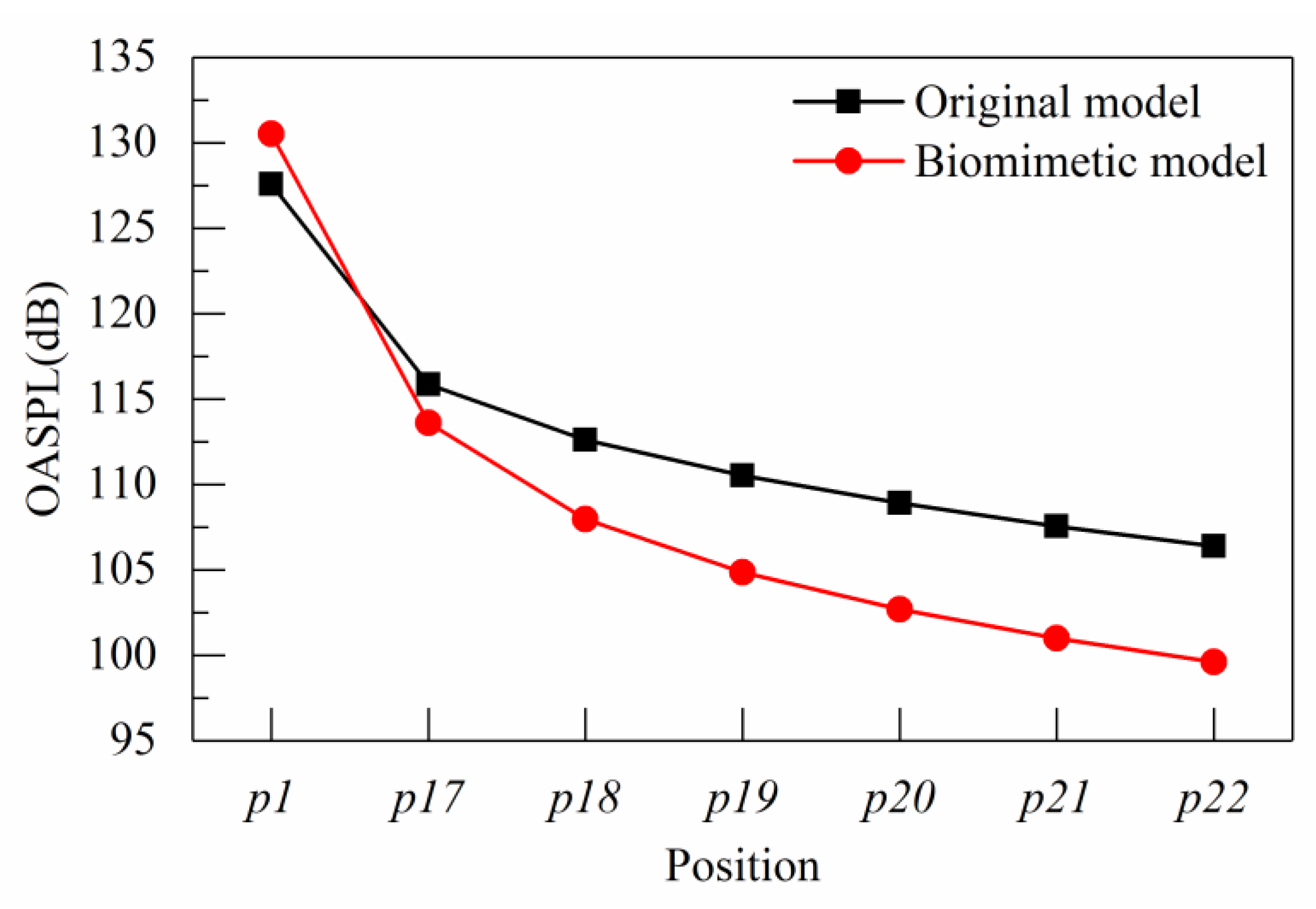
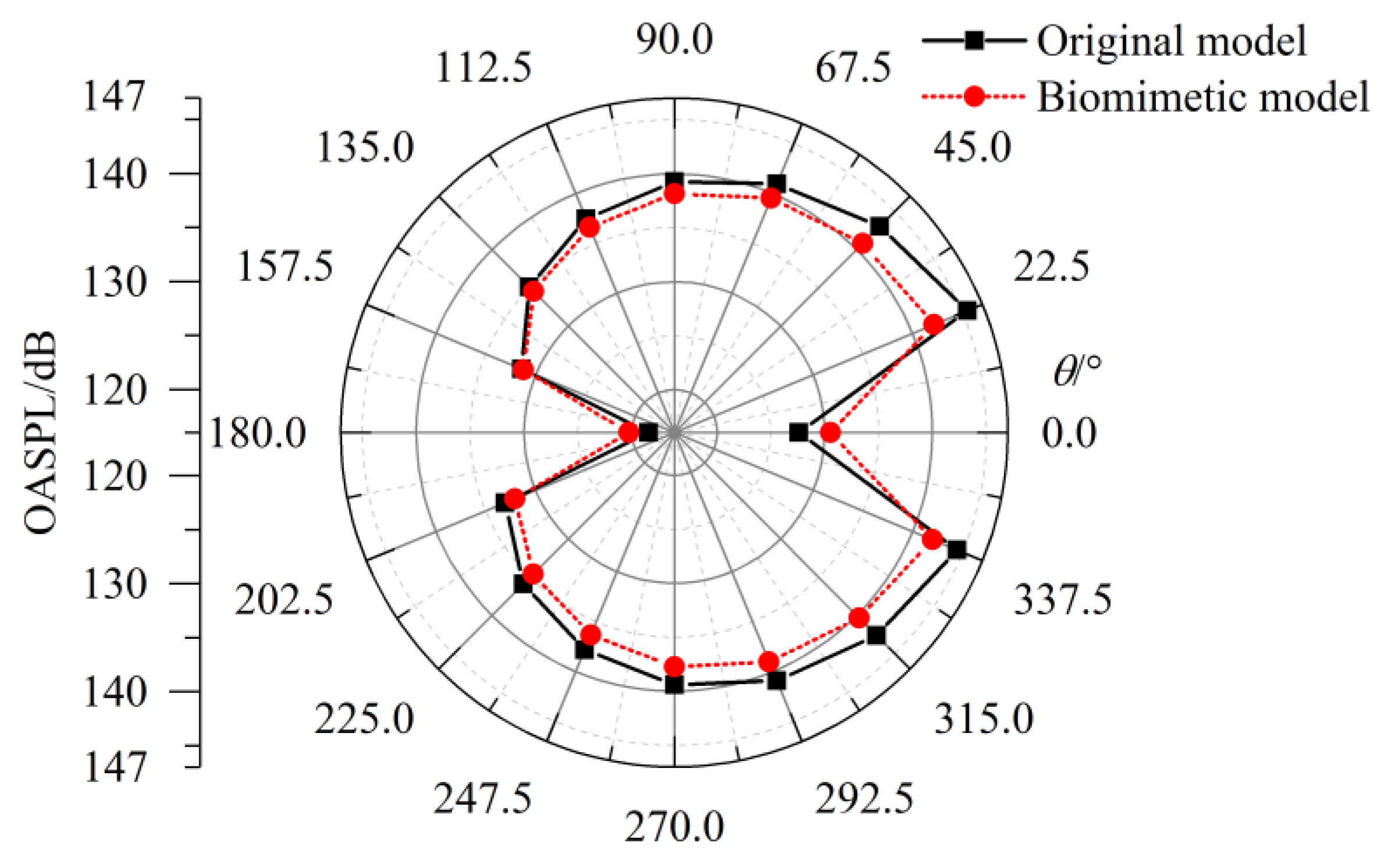
- In near sound field, the OASPLs of the observing points in the 0° and 180° direction of the biomimetic hydrofoil were larger than those of the original model. With the increase of observing distance along the direction, the OASPL of the biomimetic model gradually became lower than that of original model at the same observing positions. In particular, the maximum noise reduction of 7.28 dB could be obtained at the observing point in the 0° direction of the far sound field, which was the optimal position of all the 16 observing points along the circumferential direction.
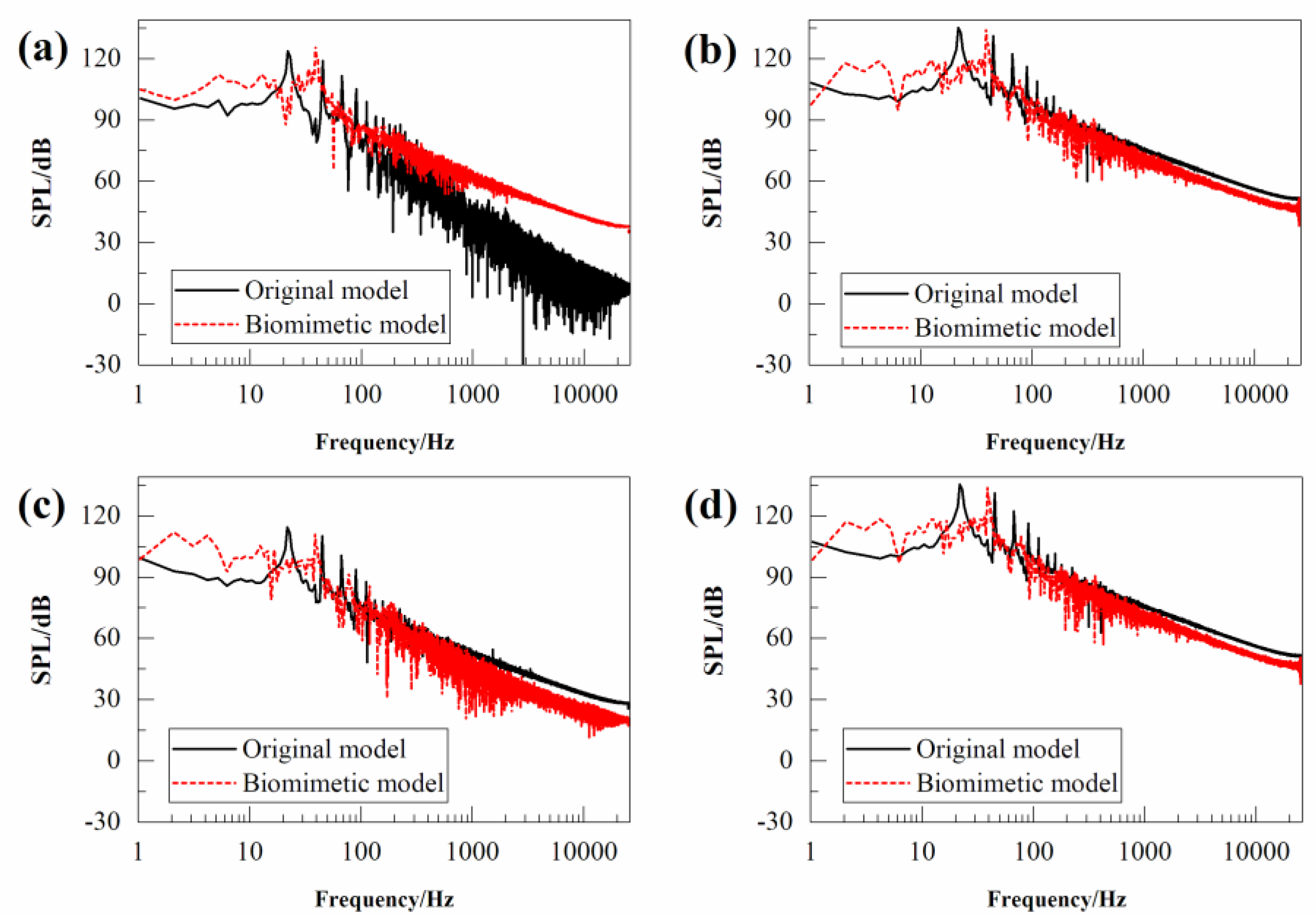
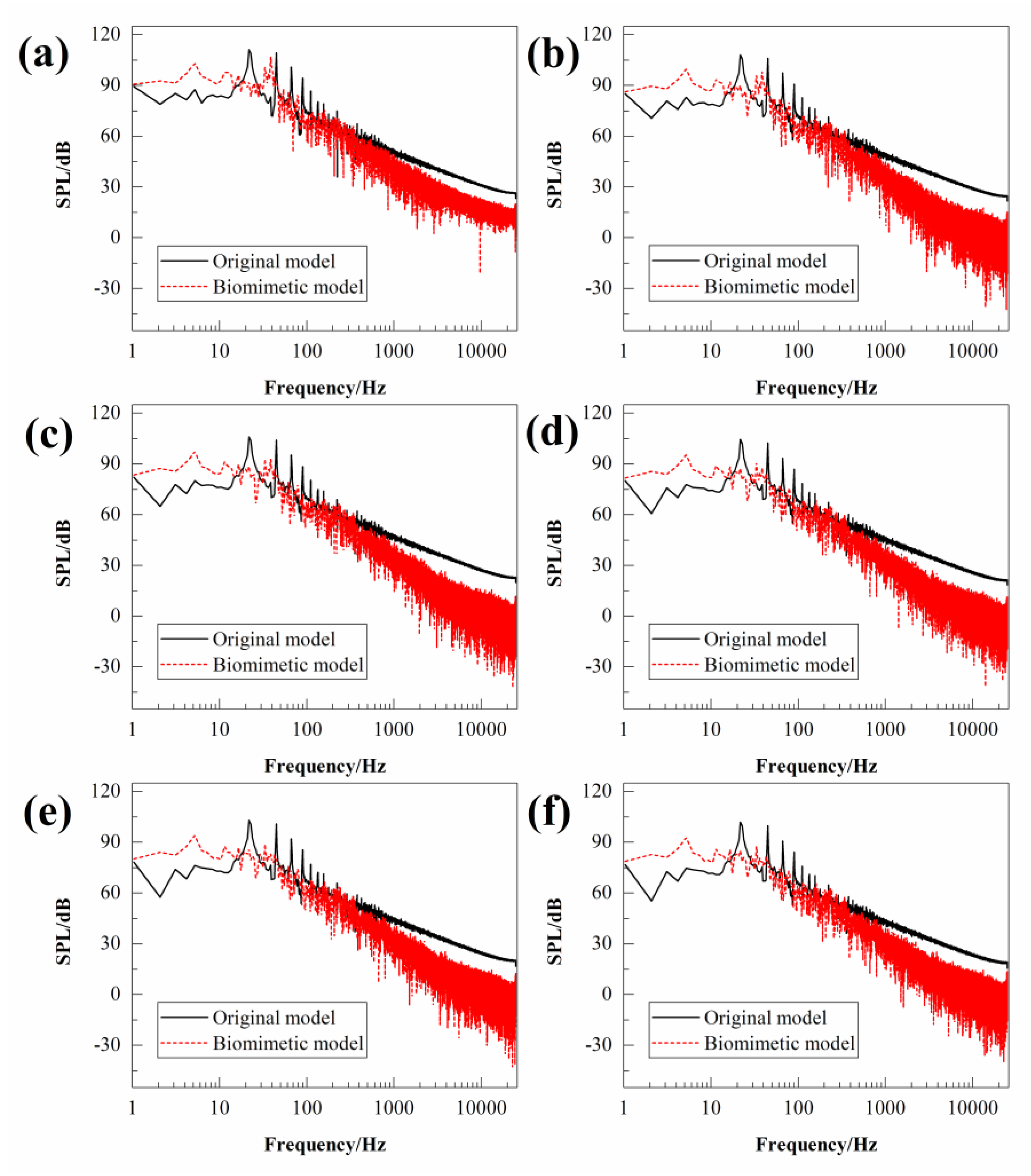
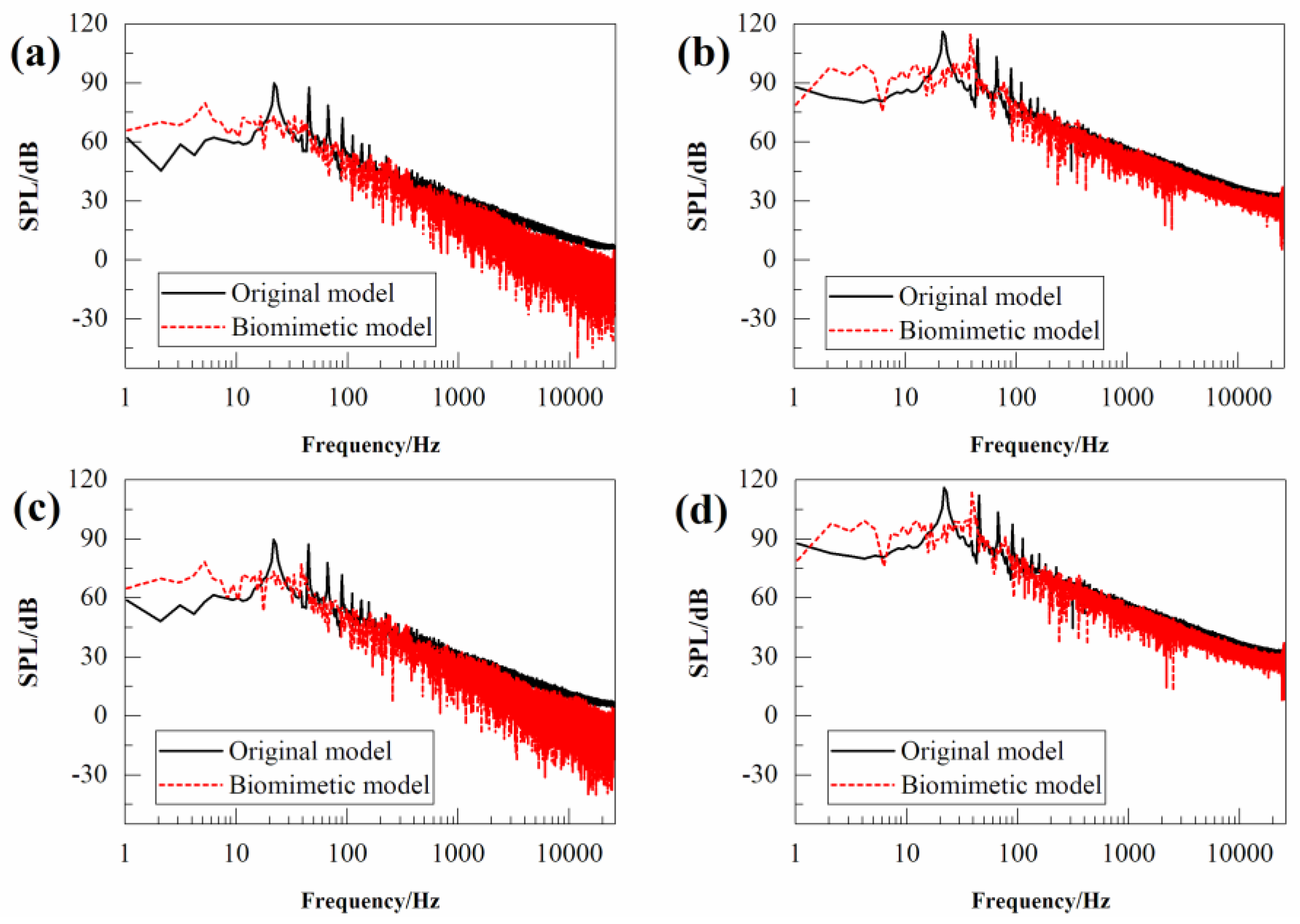
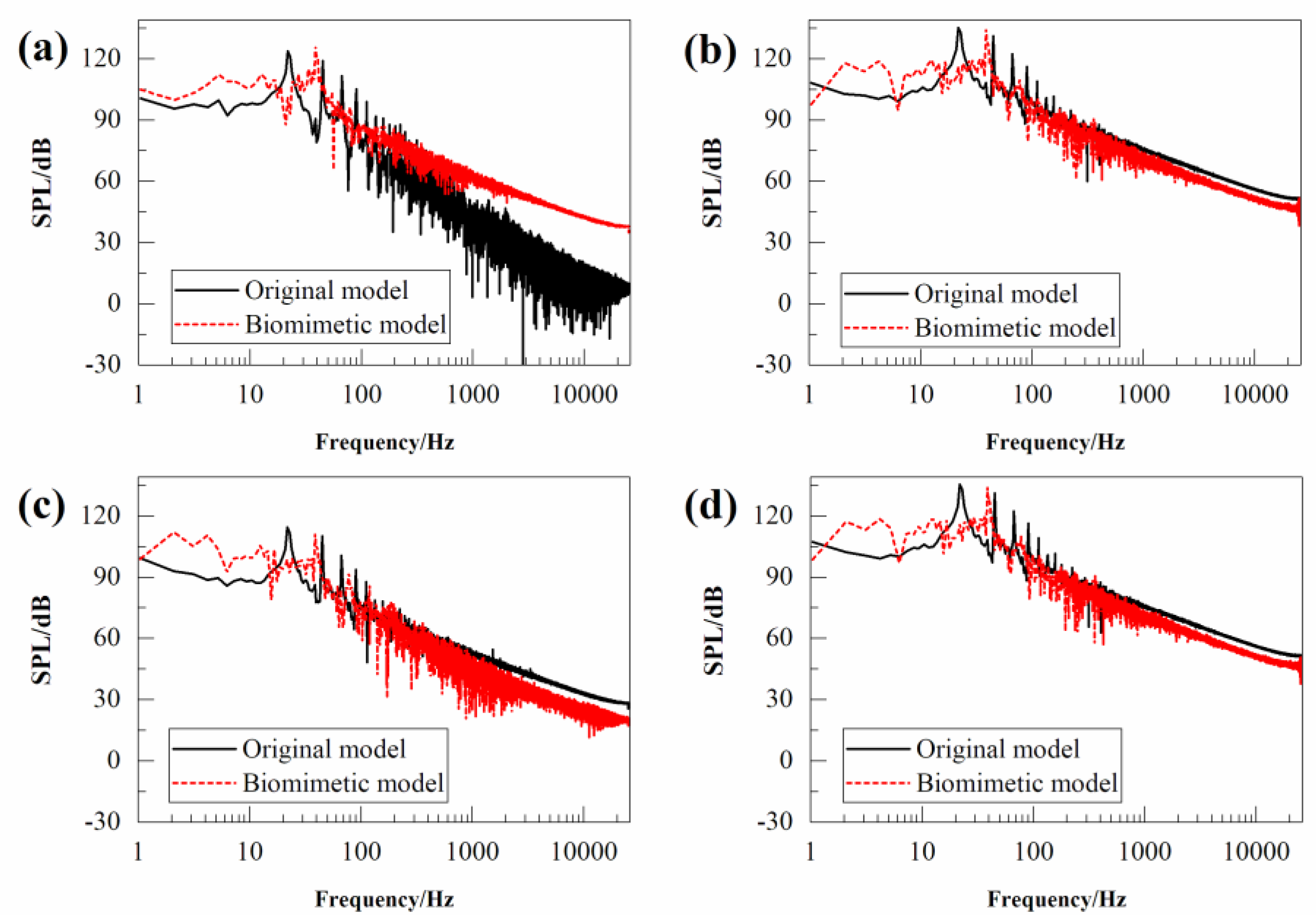
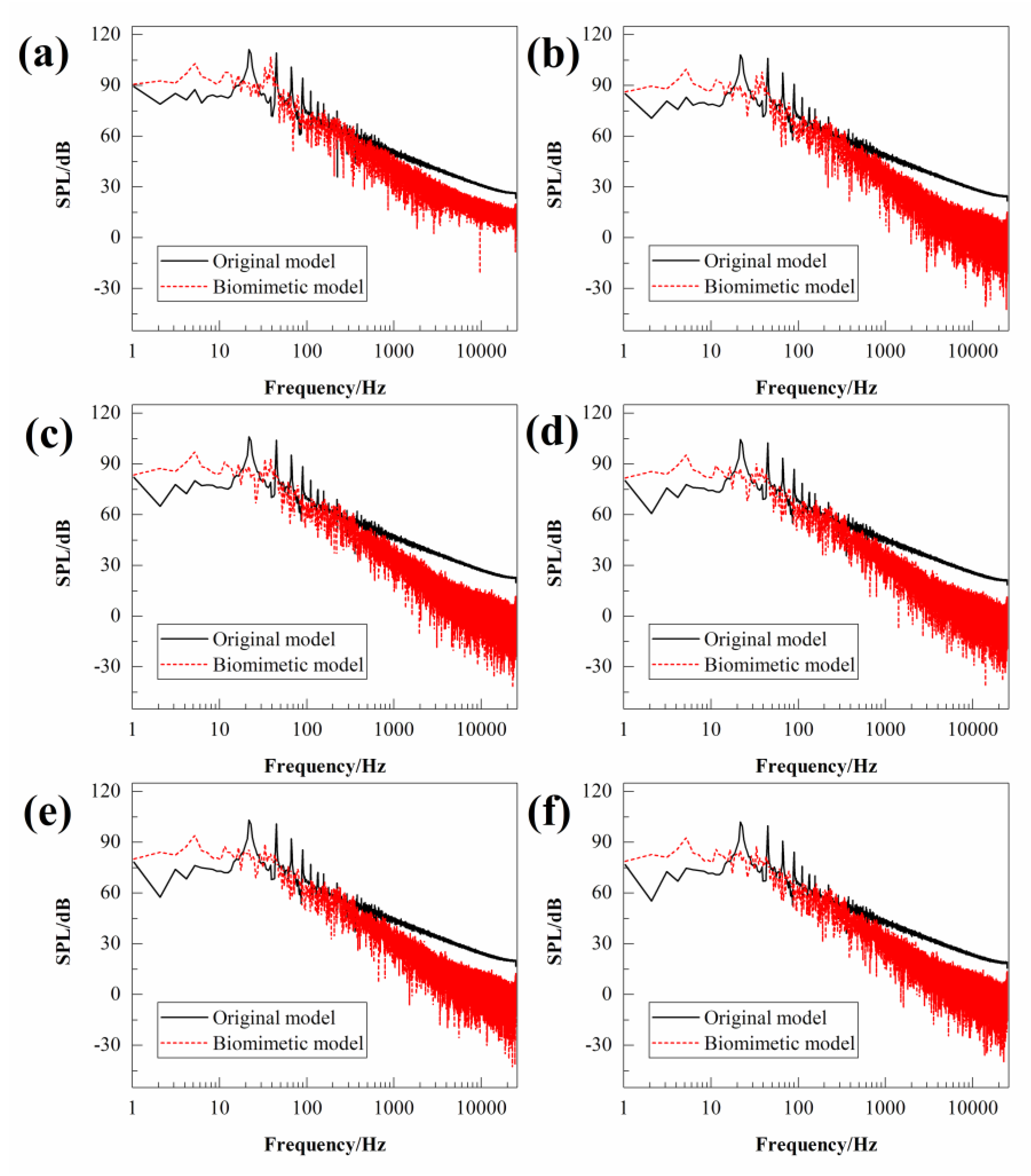
- Compared with the noise spectra of the biomimetic hydrofoil and the original hydrofoil, it can be seen that the SPL of the biomimetic model is higher at low frequencies. In the near sound field, the main peaks in the noise spectrum shifted to a higher frequency, while in the far sound field, it was observed that the main peaks in the noise spectrum almost disappeared, which resulted in a favorable noise reduction effect.
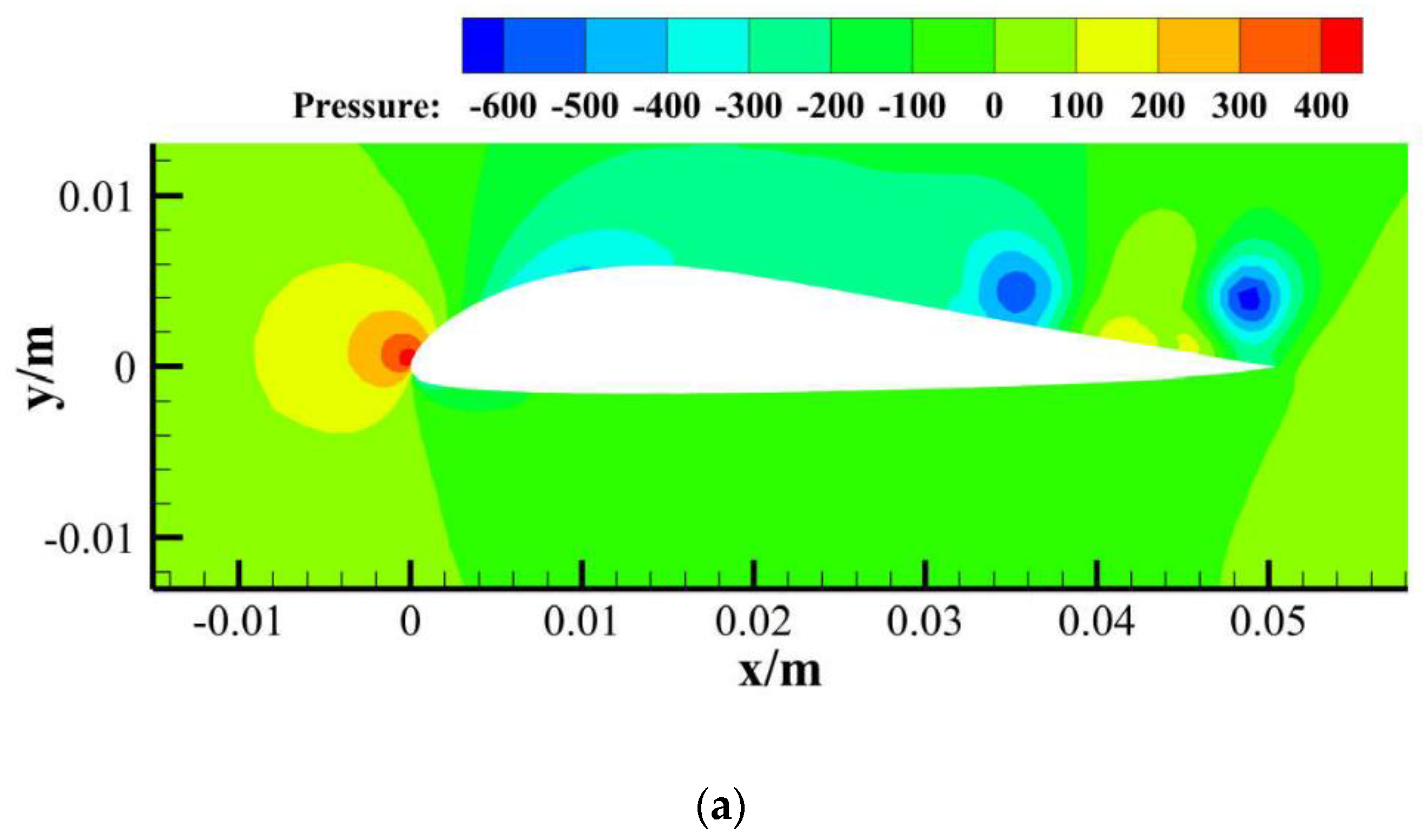
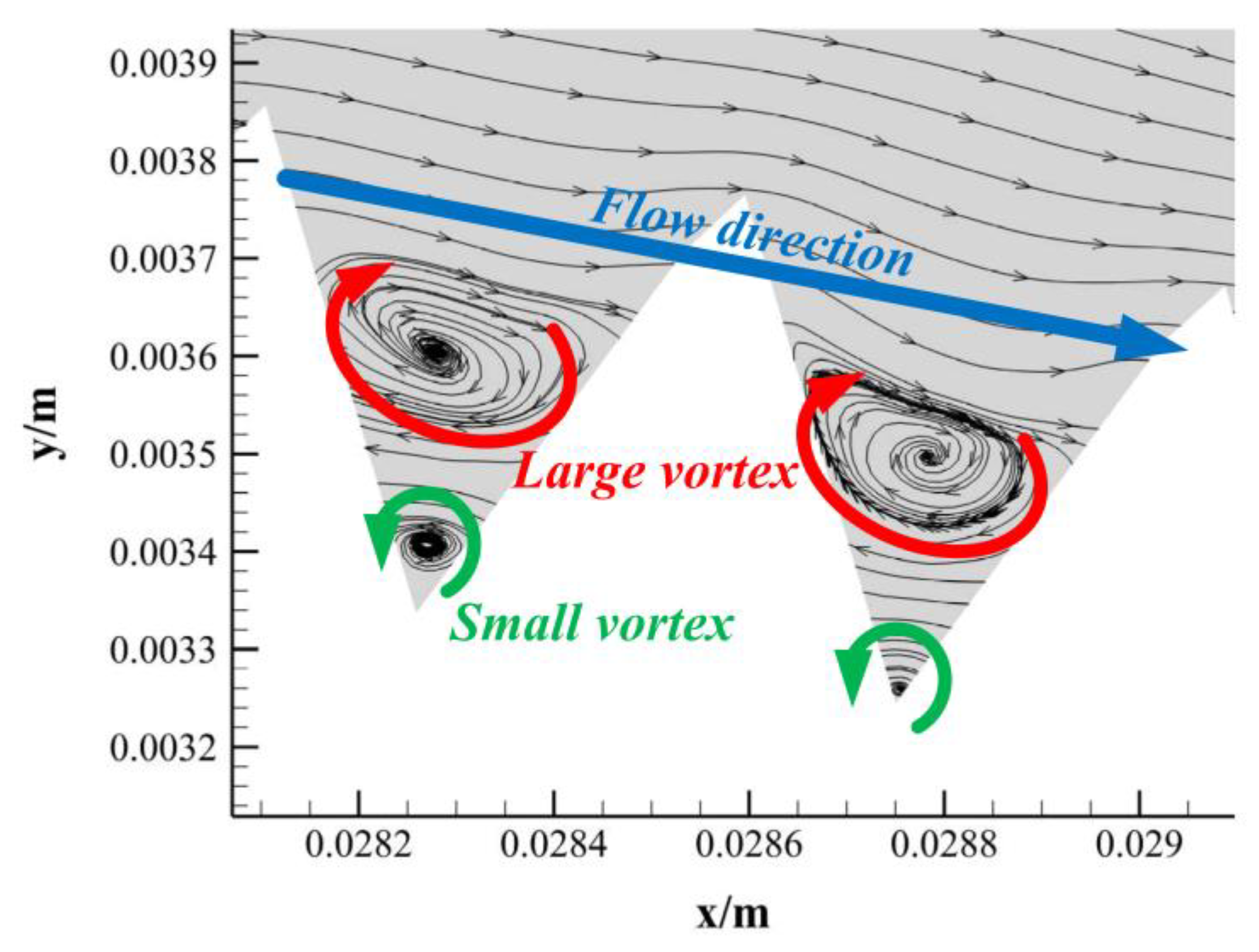
- The key to noise reduction was the generation of the secondary vortex in the microgrooves. These secondary flow vortices played a similar role to “roller bearings”, which improved the flow field around the hydrofoil and flow in the wake field.
- The influence of the flow velocity, angle of attack of the hydrofoil, and other parameters on the noise reduction performance.
- The optimal design of the spanwise microgrooves, including its dimensional parameters and suitable positions on the hydrofoils.
Author Contributions
Funding
Conflicts of Interest
References
- Lossent, J.; Lejart, M.; Folegot, T.; Clorennec, D.; Iorio, L.D.; Gervaise, C. Underwater operational noise level emitted by a tidal current turbine and its potential impact on marine fauna. Mar. Pollut. Bull. 2018, 131, 323–334. [Google Scholar] [CrossRef] [PubMed]
- Hafla, E.; Johnson, E.; Johnson, C.N.; Preston, L.; Aldridge, D.; Roberts, J.D. Modeling underwater noise propagation from marine hydrokinetic power devices through a time-domain, velocity-pressure solution. J. Acoust. Soc. Am. 2018, 143, 3242–3253. [Google Scholar] [CrossRef] [PubMed]
- Harris, B.A. Turn Down the Volume: Improved Federal Regulation of Shipping Noise Is Necessary to Protect Marine Mammals. UCLA J. Environ. Law Policy 2017, 35, 206. [Google Scholar]
- Bosschers, J. A semi-empirical prediction method for broadband hull-pressure fluctuations and underwater radiated noise by propeller tip vortex cavitation. J. Mar. Sci. Eng. 2018, 6, 49. [Google Scholar] [CrossRef]
- Viitanen, V.; Hynninen, A.; Sipilä, T.; Siikonen, T. DDES of wetted and cavitating marine propeller for CHA underwater noise assessment. J. Mar. Sci. Eng. 2018, 6, 56. [Google Scholar] [CrossRef]
- Brooks, T.F.; Pope, D.S.; Marcolini, M.A. Airfoil Self-Noise and Prediction; NASA Reference Publication 1218; NASA Langley Research Center: Hampton, VA, USA, 1989.
- Howe, M.S. Aerodynamic noise of a serrated trailing edge. J. Fluid Struct. 1991, 5, 33–45. [Google Scholar] [CrossRef]
- Howe, M.S. Noise produced by a sawtooth trailing edge. J. Acoust. Soc. Am. 1991, 90, 482–487. [Google Scholar] [CrossRef]
- Gruber, M.; Joseph, P.F.; Chong, T.P. On the mechanisms of serrated airfoil trailing edge noise reduction. In Proceedings of the 17th AIAA/CEAS Aeroacoustics Conference, Portland, OR, USA, 5–8 June 2011; p. 2781. [Google Scholar]
- Sandberg, R.D.; Jones, L.E. Direct numerical simulations of low Reynolds number flow over airfoils with trailing-edge serrations. J. Sound Vib. 2011, 330, 3818–3831. [Google Scholar] [CrossRef]
- Chong, T.P.; Joseph, P.F. An experimental study of airfoil instability tonal noise with trailing edge serrations. J. Sound Vib. 2013, 332, 6335–6358. [Google Scholar] [CrossRef]
- Jaron, R.; Moreau, A.; Guérin, S.; Schnell, R. Optimization of trailing-edge serrations to reduce open-rotor tonal interaction noise. J. Fluid Eng. 2018, 140, 021201. [Google Scholar] [CrossRef]
- Lee, H.M.; Lu, Z.; Lim, K.M.; Xie, J.; Lee, H.P. Quieter propeller with serrated trailing edge. Appl. Acoust. 2019, 146, 227–236. [Google Scholar] [CrossRef]
- Chong, T.P.; Joseph, P.F.; Gruber, M. Airfoil self noise reduction by non-flat plate type trailing edge serrations. Appl. Acoust. 2013, 74, 607–613. [Google Scholar] [CrossRef]
- Chong, T.P.; Dubois, E. Optimization of the poro-serrated trailing edges for airfoil broadband noise reduction. J. Acoust. Soc. Am. 2016, 140, 1361–1373. [Google Scholar] [CrossRef]
- León, C.A.; Ragni, D.; Pröbsting, S.; Scarano, F.; Madsen, J. Flow topology and acoustic emissions of trailing edge serrations at incidence. Exp. Fluids 2016, 57, 91. [Google Scholar] [CrossRef]
- Avallone, F.; Van der Velden, W.C.P.; Ragni, D. Benefits of curved serrations on broadband trailing-edge noise reduction. J. Sound Vib. 2017, 400, 167–177. [Google Scholar] [CrossRef]
- Avallone, F.; Van der Velden, W.C.P.; Ragni, D.; Casalino, D. Noise reduction mechanisms of sawtooth and combed-sawtooth trailing-edge serrations. J. Fluid Mech. 2018, 848, 560–591. [Google Scholar] [CrossRef]
- Clair, V.; Polacsek, C.; Garrec, T.L.; Reboul, G.; Gruber, M.; Joseph, P. Experimental and numerical investigation of turbulence-airfoil noise reduction using wavy edges. AIAA J. 2013, 51, 2695–2713. [Google Scholar] [CrossRef]
- Narayanan, S.; Chaitanya, P.; Haeri, S.; Joseph, P.; Kim, J.W.; Polacsek, C. Airfoil noise reductions through leading edge serrations. Phys. Fluids 2015, 27, 025109. [Google Scholar] [CrossRef]
- Chaitanya, P.; Joseph, P.; Narayanan, S.; Kim, J.W. Aerofoil broadband noise reductions through double-wavelength leading-edge serrations: A new control concept. J. Fluid Mech. 2018, 855, 131–151. [Google Scholar] [CrossRef]
- Chen, W.; Qiao, W.; Tong, F.; Wang, L.; Wang, X. Experimental investigation of wavy leading edges on rod-aerofoil interaction noise. J. Sound Vib. 2018, 422, 409–431. [Google Scholar] [CrossRef]
- Shi, W.; Atlar, M.; Rosli, R.; Aktas, B.; Norman, R. Cavitation observations and noise measurements of horizontal axis tidal turbines with biomimetic blade leading-edge designs. Ocean Eng. 2016, 121, 143–155. [Google Scholar] [CrossRef]
- Liu, Y.; Li, Y.; Shang, D. The Hydrodynamic Noise Suppression of a Scaled Submarine Model by Leading-Edge Serrations. J. Mar. Sci. Eng. 2019, 7, 68. [Google Scholar] [CrossRef]
- Wang, C. Trailing edge perforation for interaction tonal noise reduction of a contra-rotating fan. J. Vib. Acoust. 2018, 140, 021016. [Google Scholar] [CrossRef]
- Maizi, M.; Mohamed, M.H.; Dizene, R.; Mihoubi, M.C. Noise reduction of a horizontal wind turbine using different blade shapes. Renew. Energy 2018, 117, 242–256. [Google Scholar] [CrossRef]
- Carpio, A.R.; Martínez, R.M.; Avallone, F.; Ragni, D.; Snellen, M.; Van der Zwaag, S. Experimental characterization of the turbulent boundary layer over a porous trailing edge for noise abatement. J. Sound Vib. 2019, 443, 537–558. [Google Scholar] [CrossRef]
- Arnold, B.; Lutz, T.; Krämer, E.; Rautmann, C. Wind-Turbine Trailing-Edge Noise Reduction by Means of Boundary-Layer Suction. AIAA J. 2018, 5, 1843–1854. [Google Scholar] [CrossRef]
- Walsh, M.; Weinstein, L. Drag and heat transfer on surfaces with small longitudinal fins. In Proceedings of the 11th Fluid and Plasma Dynamics Conference, Seattle, WA, USA, 10–12 July 1978; p. 1161. [Google Scholar]
- Walsh, M. Turbulent boundary layer drag reduction using riblets. In Proceedings of the 20th Aerospace Sciences Meeting, Orlando, FL, USA, 11–14 January 1982; p. 169. [Google Scholar]
- Choi, K.S. Smart Flow Control with Riblets. Adv. Mater. Res. 2013, 745, 27–40. [Google Scholar] [CrossRef]
- Choi, K.S. Near-wall structure of a turbulent boundary layer with riblets. J. Fluid Mech. 1989, 208, 417–458. [Google Scholar] [CrossRef]
- Joslin, R.D.; Thomas, R.H.; Choudhari, M.M. Synergism of flow and noise control technologies. Prog. Aerosp. Sci. 2005, 41, 363–417. [Google Scholar] [CrossRef]
- Gillcrist, M.C.; Reidy, L.W. Drag and Noise Measurements on an Underwater Vehicle with a Riblet Surface Coating; Naval Ocean Systems Center (NOSC): San Diego, CA, USA, 1989. [Google Scholar]
- Shi, X.; Song, B.; Shi, Z. Experimental study on flow-noise reduction by riblets. J. Northwest. Polytech. Univ. 1997, 15, 395–398. (In Chinese) [Google Scholar]
- Fu, Y.F.; Yuan, C.Q.; Bai, X.Q. Marine drag reduction of shark skin inspired riblet surfaces. Biosurf. Biotribol. 2017, 3, 11–24. [Google Scholar] [CrossRef]
- Chen, D.; Liu, Y.; Chen, H.; Zhang, D. Bio-inspired drag reduction surface from sharkskin. Biosurf. Biotribol. 2018, 4, 39–45. [Google Scholar] [CrossRef]
- Luo, Y. Recent progress in exploring drag reduction mechanism of real sharkskin surface: A review. J. Mech. Med. Biol. 2015, 15, 1530002. [Google Scholar] [CrossRef]
- Luo, Y.H.; Li, X.; Zhang, D.Y.; Liu, Y.F. Drag reducing surface fabrication with deformed sharkskin morphology. Surf. Eng. 2016, 32, 157–163. [Google Scholar] [CrossRef]
- Lee, S.J.; Jang, Y.G. Control of flow around a NACA 0012 airfoil with a micro-riblet film. J. Fluid. Struct. 2005, 20, 659–672. [Google Scholar] [CrossRef]
- Chamorro, L.P.; Arndt, R.E.A.; Sotiropoulos, F. Drag reduction of large wind turbine blades through riblets: Evaluation of riblet geometry and application strategies. Renew. Energy 2013, 50, 1095–1105. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, H.; Fu, S.; Dong, W. Numerical study of an airfoil with riblets installed based on large eddy simulation. Aerosp. Sci. Technol. 2018, 78, 661–670. [Google Scholar] [CrossRef]
- Yuan, Y.; Yang, H.; Shi, Y.; Zuo, H. Study on drag reduction characteristics of airfoil for wind turbine with microgrooves on surface. J. Eng. Therm. 2018, 39, 1258–1266. (In Chinese) [Google Scholar]
- Kaakkunen, J.J.; Tiainen, J.; Jaatinen-Värri, A.; Grönman, A.; Lohtander, M. Nanosecond laser ablation of the trapezoidal structures for turbomachinery applications. Procedia Manuf. 2018, 25, 435–442. [Google Scholar] [CrossRef]
- Lam, K.; Lin, Y.F. Large eddy simulation of flow around wavy cylinders at subcritical Reynolds number. Int. J. Heat Fluid Flow 2008, 29, 1071–1088. [Google Scholar] [CrossRef]
- Ffowcs, J.E.; Hawkings, D.L. Sound generated by turbulence and surfaces in arbitrary motion. Philos. Trans. R. Soc. A Math. Phys. Sci. 1969, 264, 321–342. [Google Scholar]
- ANSYS. ANSYS FLUENT User’s Guide; ANSYS Inc.: Canonsburg, PA, USA, 2011. [Google Scholar]
- Hinze, J.O. Turbulence; McGraw-Hill Inc.: New York, NY, USA, 1975. [Google Scholar]
- ANSYS. ANSYS FLUENT Theory Guide; ANSYS Inc.: Canonsburg, PA, USA, 2011. [Google Scholar]
- UIUC Airfoil Coordinates Database. Available online: https://m-selig.ae.illinois.edu/ads/coord_database.html (accessed on 31 March 2019).
- Walsh, M.J. Drag characteristics of V-groove and transverse curvature riblets. In Proceedings of the Symposium on Viscous Flow Drag Reduction, Dallas, TX, USA, 7–8 November 1979. [Google Scholar]
- Walsh, M.J. Riblets as a viscous drag reduction technique. AIAA J. 1983, 21, 485–486. [Google Scholar] [CrossRef]
- Walsh, M.J. Effect of detailed surface geometry on riblet drag reduction performance. J. Aircr. 1990, 27, 572–573. [Google Scholar] [CrossRef]
- Gregory, N.; O’reilly, C.L. Low-Speed Aerodynamic Characteristics of NACA 0012 Aerofoil Section, Including the Effects of Upper-Surface Roughness Simulating Hoar Frost; HM Stationery Office: London, UK, 1973. [Google Scholar]
- Pan, J. The experimental approach to drag reduction of the transverse ribbons on turbulent flow. Acta Aerodyn. Sin. 1996, 14, 304–310. (In Chinese) [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Details of Mesh | Mesh 1 | Mesh 2 | Mesh 3 | Mesh 4 | Mesh 5 |
|---|---|---|---|---|---|
| Total number of elements | 1,593,064 | 2,035,810 | 2,793,386 | 6,788,150 | 8,856,372 |
| Layer number of boundary layers | 10 | 20 | 10 | 20 | 30 |
| Element size of boundary layers (m) | 8.0 × 10−4 | 8.0 × 10−4 | 5.0 × 10−4 | 5.0 × 10−4 | 5.0 × 10−4 |
| Element size along spanwise direction | 2.0 × 10−3 | 2.0 × 10−3 | 2.0 × 10−3 | 1.0 × 10−3 | 1.0 × 10−3 |
| Description | Parameter and Value |
|---|---|
| Temperature | = 20 °C |
| Density | = 998.2 kg/m3 |
| Viscosity | = 0.001003 kg/(m·s) |
| Sound speed | = 1483 m/s |
| Reference acoustic pressure | = 1.0 × 10−6 Pa |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dang, Z.; Mao, Z.; Tian, W. Reduction of Hydrodynamic Noise of 3D Hydrofoil with Spanwise Microgrooved Surfaces Inspired by Sharkskin. J. Mar. Sci. Eng. 2019, 7, 136. https://doi.org/10.3390/jmse7050136
Dang Z, Mao Z, Tian W. Reduction of Hydrodynamic Noise of 3D Hydrofoil with Spanwise Microgrooved Surfaces Inspired by Sharkskin. Journal of Marine Science and Engineering. 2019; 7(5):136. https://doi.org/10.3390/jmse7050136
Chicago/Turabian StyleDang, Zhigao, Zhaoyong Mao, and Wenlong Tian. 2019. "Reduction of Hydrodynamic Noise of 3D Hydrofoil with Spanwise Microgrooved Surfaces Inspired by Sharkskin" Journal of Marine Science and Engineering 7, no. 5: 136. https://doi.org/10.3390/jmse7050136
APA StyleDang, Z., Mao, Z., & Tian, W. (2019). Reduction of Hydrodynamic Noise of 3D Hydrofoil with Spanwise Microgrooved Surfaces Inspired by Sharkskin. Journal of Marine Science and Engineering, 7(5), 136. https://doi.org/10.3390/jmse7050136