System Modeling and Simulation of an Unmanned Aerial Underwater Vehicle


Abstract
1. Introduction
- (1)
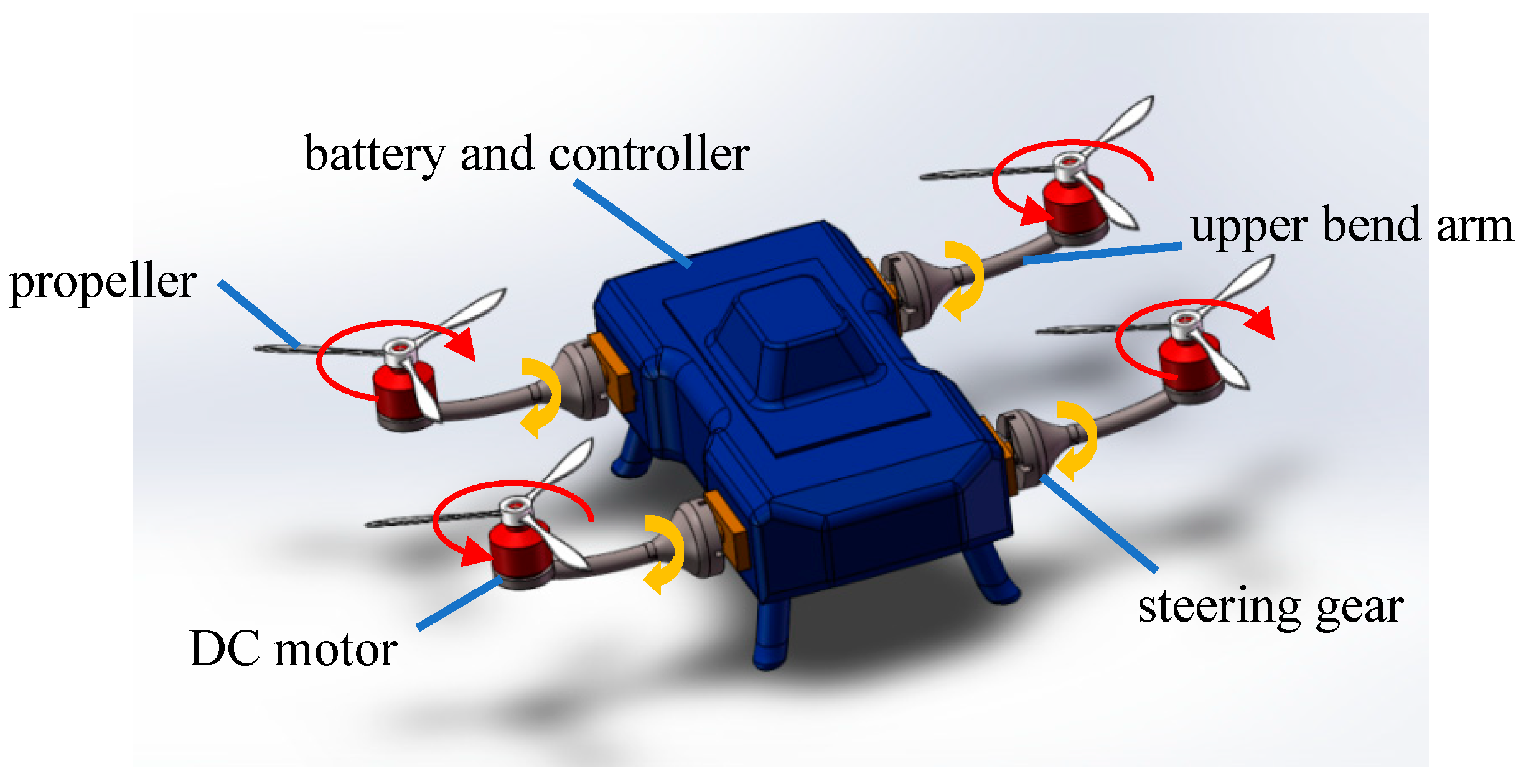
- A four-rotor vehicle with adjustable arms is designed to be used in the switching operation of propulsion direction. The simple mechanism makes the vehicle more flexible and reliable. The use of only a single set of aerial rotors in both mediums greatly reduces cost, weight, and complexity compared to the other aerial underwater vehicle.
- (2)
- Mathematical models of the UAUV are deduced, the continuous dynamics are modeled by the Newton–Euler formalism, taking into account the effects of some additional variables, such as water resistance, buoyancy and their corresponding moments, normally neglected in aerial vehicles. Furthermore, a critical coefficient for air-to-water switching is presented to model the changed mass, force and moment in the cross-medium motion process.
- (3)
- Robust sliding mode switching controllers are designed for effectively handling the cross-medium motion and achieving precise trajectory tracking. Finally, as a proof of concept, some simulation results for the trajectory tracking control are provided for the cross-medium unmanned vehicle.
2. Preliminaries
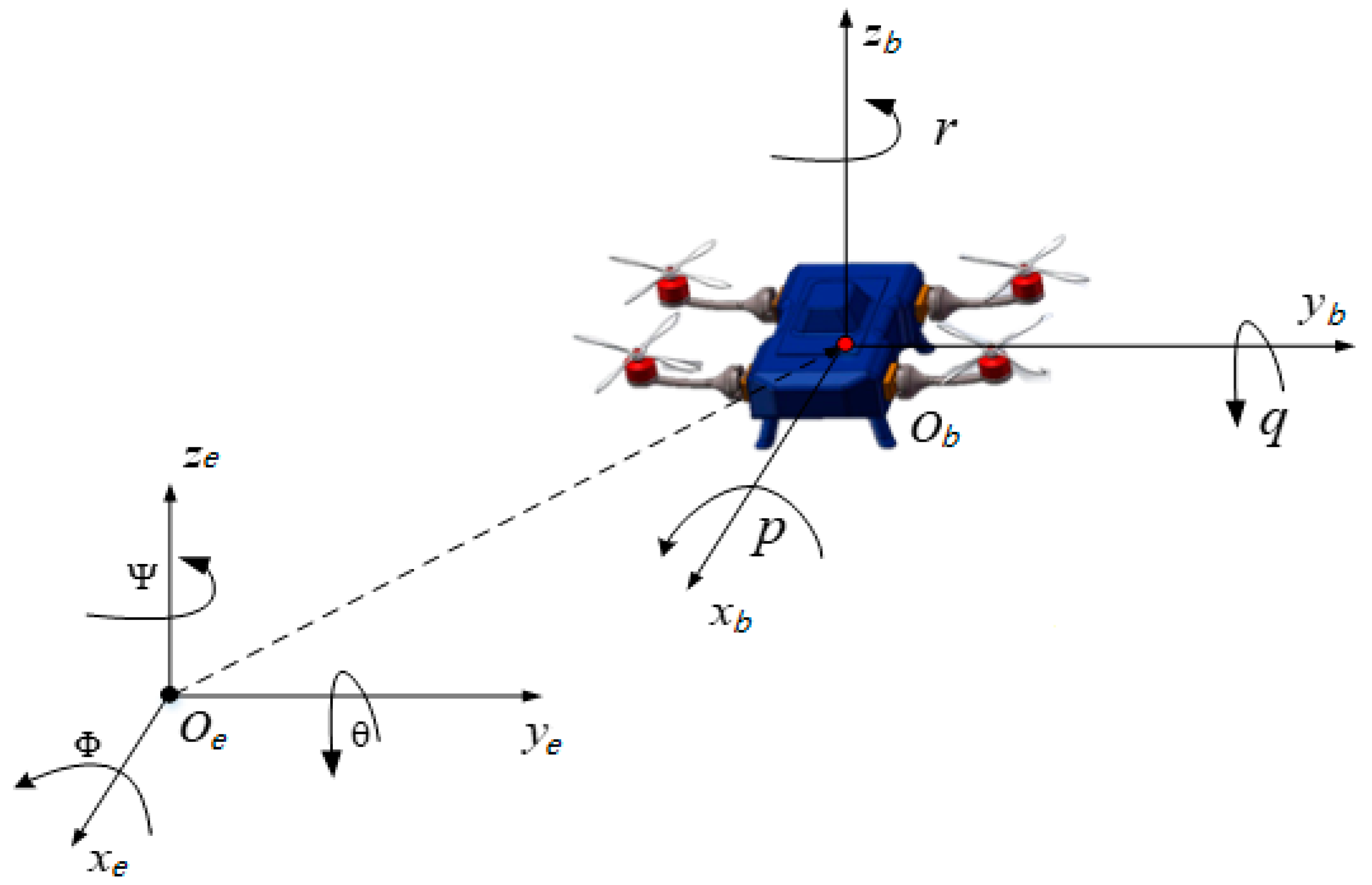
2.1. Reference Frames
2.2. Modeling of Multi-Rotor Vehicles
3. Dynamics of Cross-Medium Unmanned Aerial Underwater Vehicles (UAUVs)
3.1. Dynamics when
3.2. Dynamics when
3.3. Dynamics when
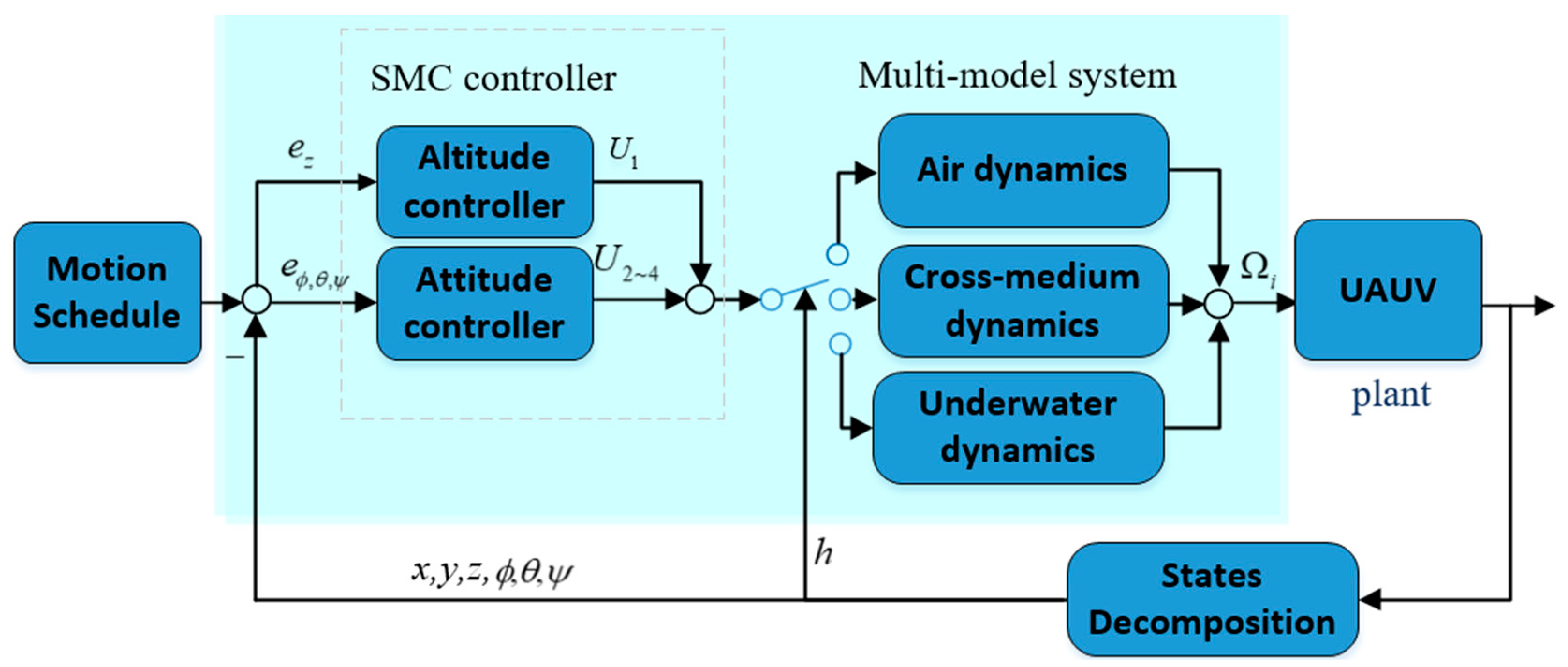
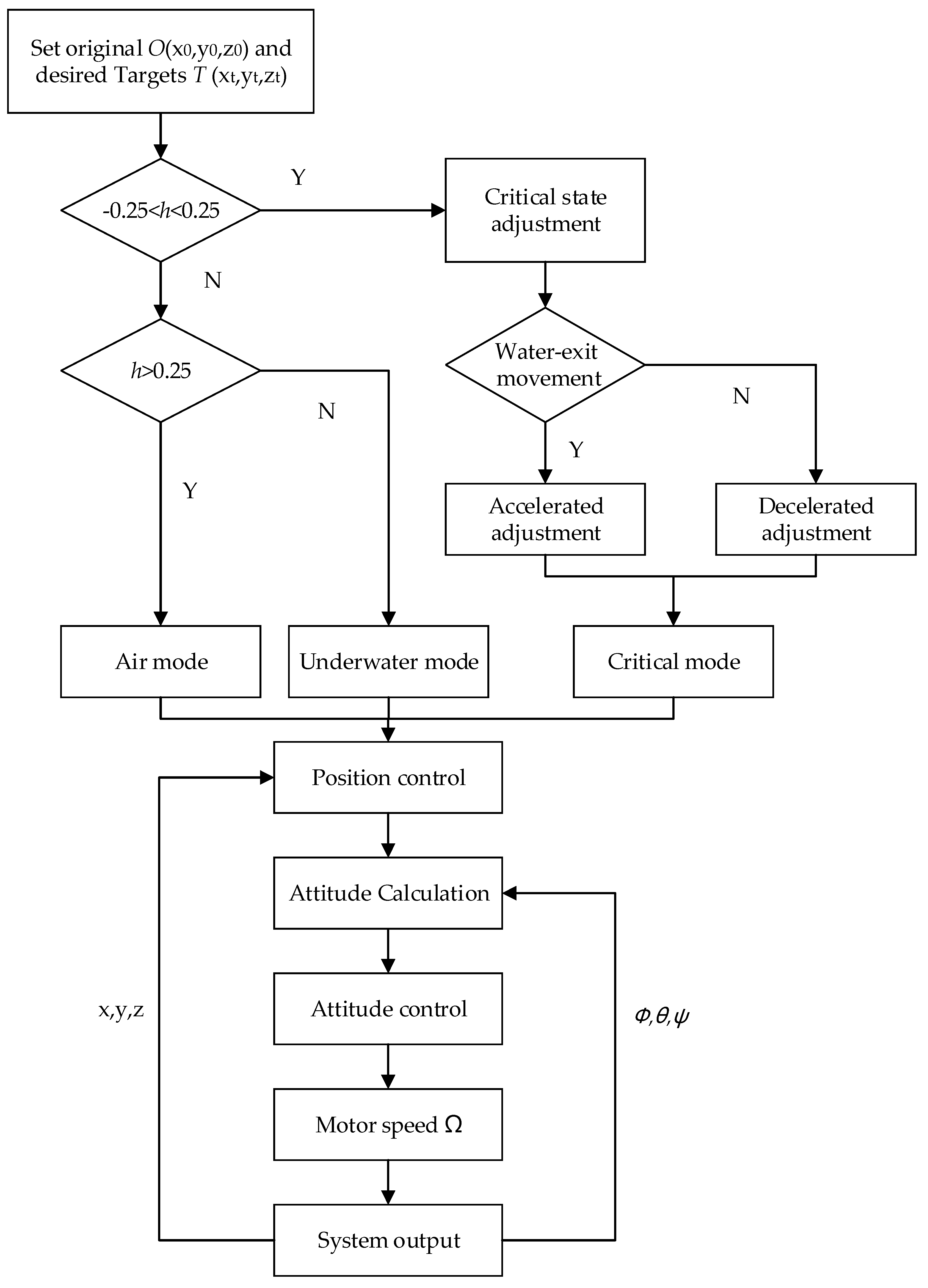
4. Controller Design
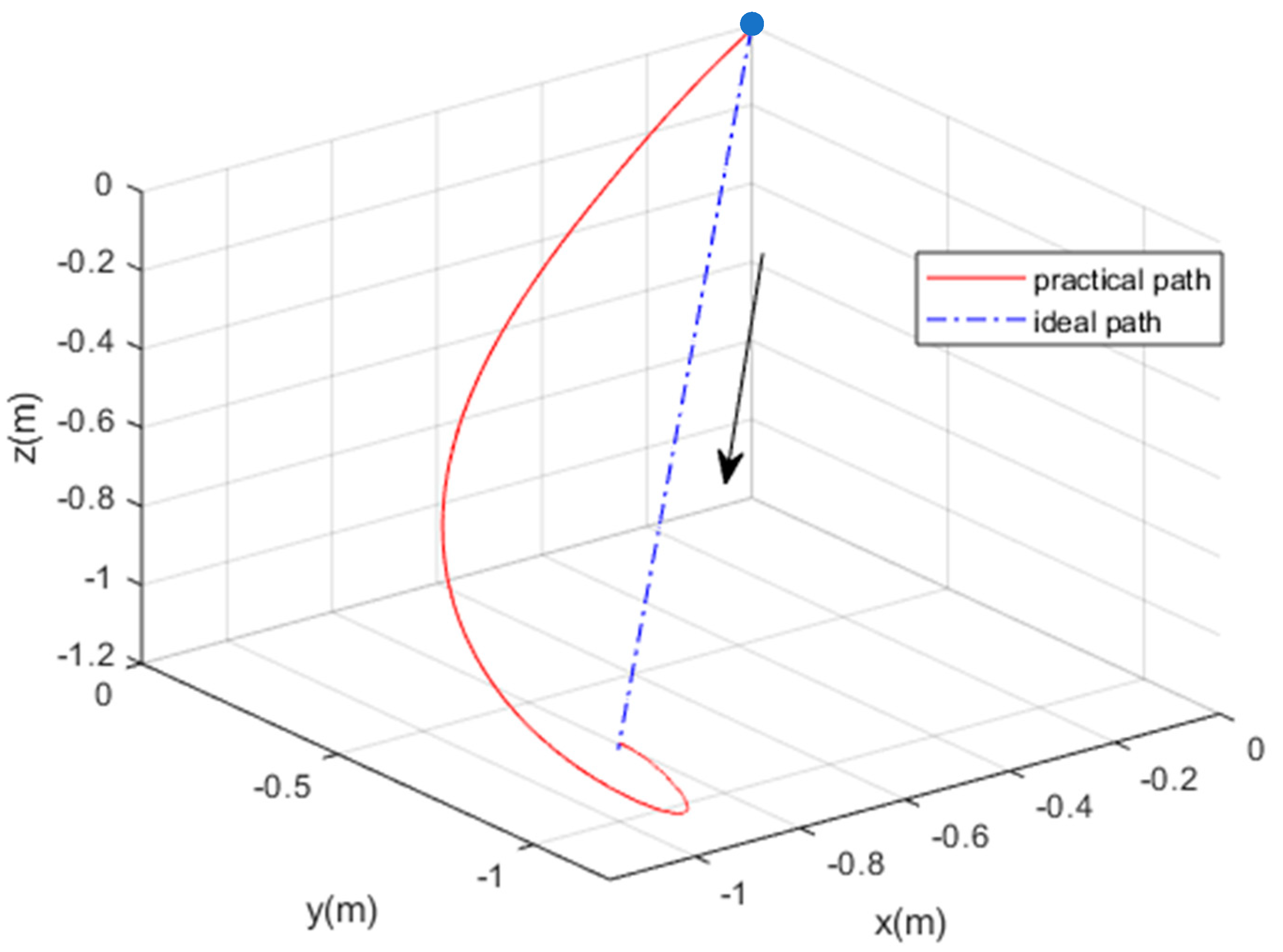
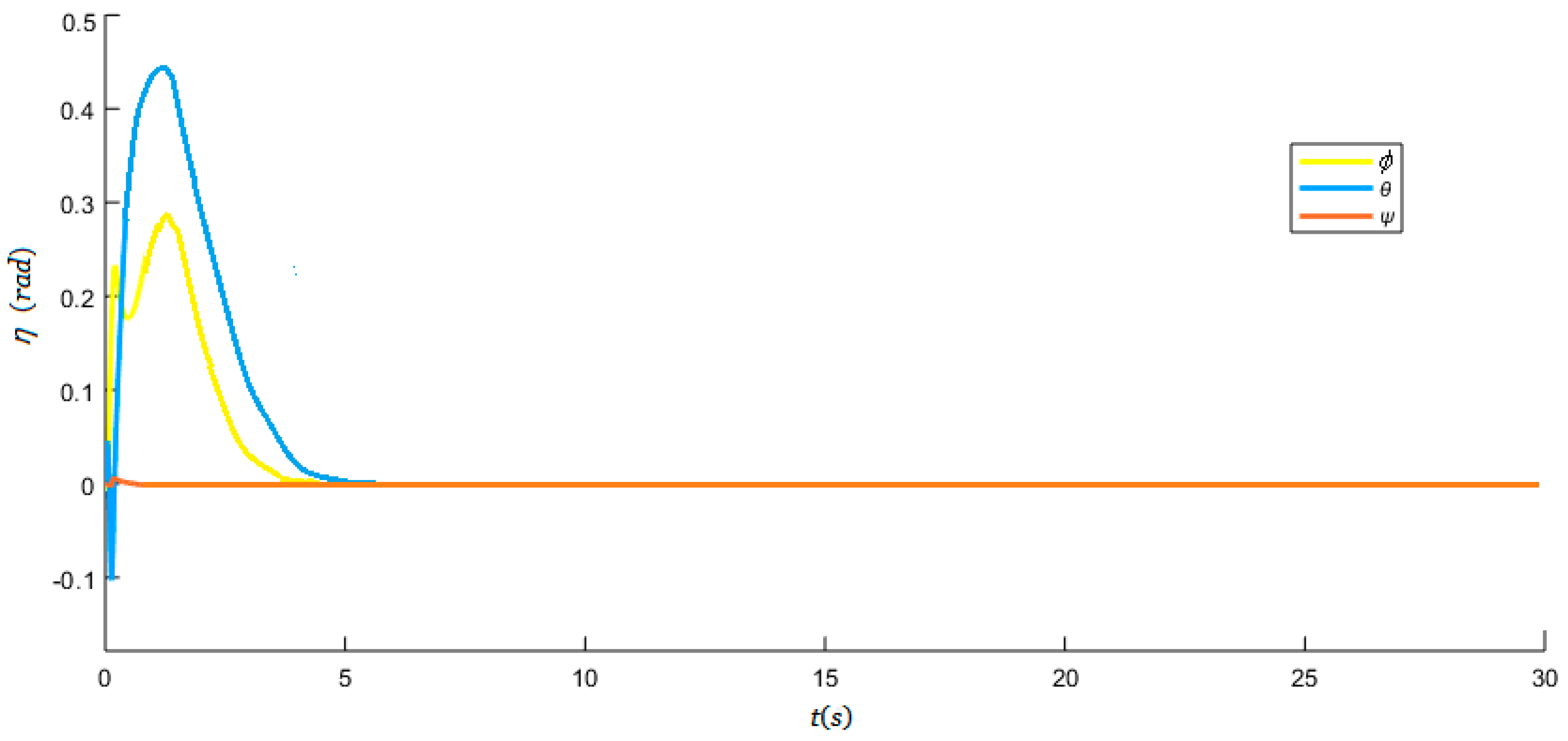
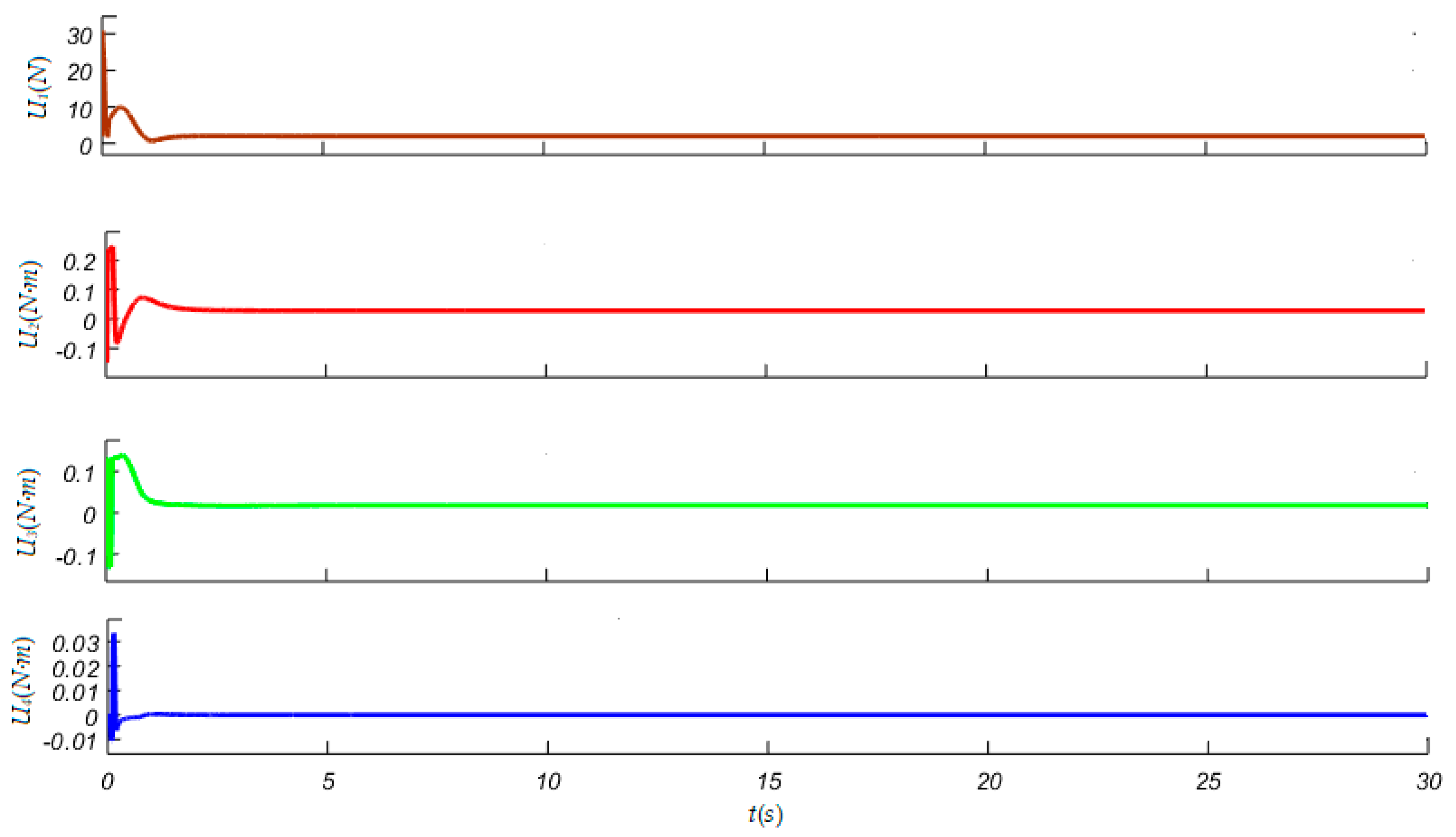
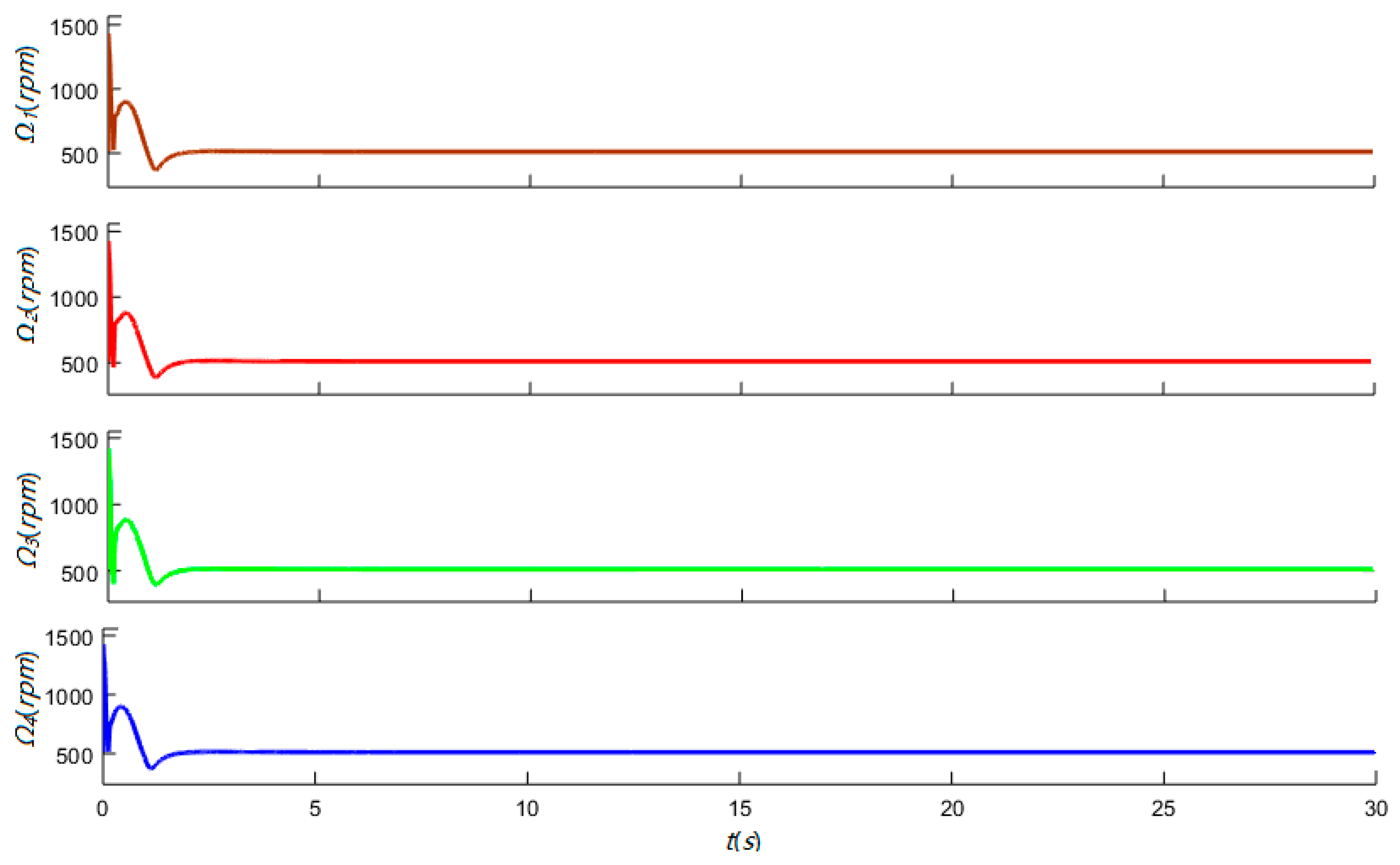
5. Simulations
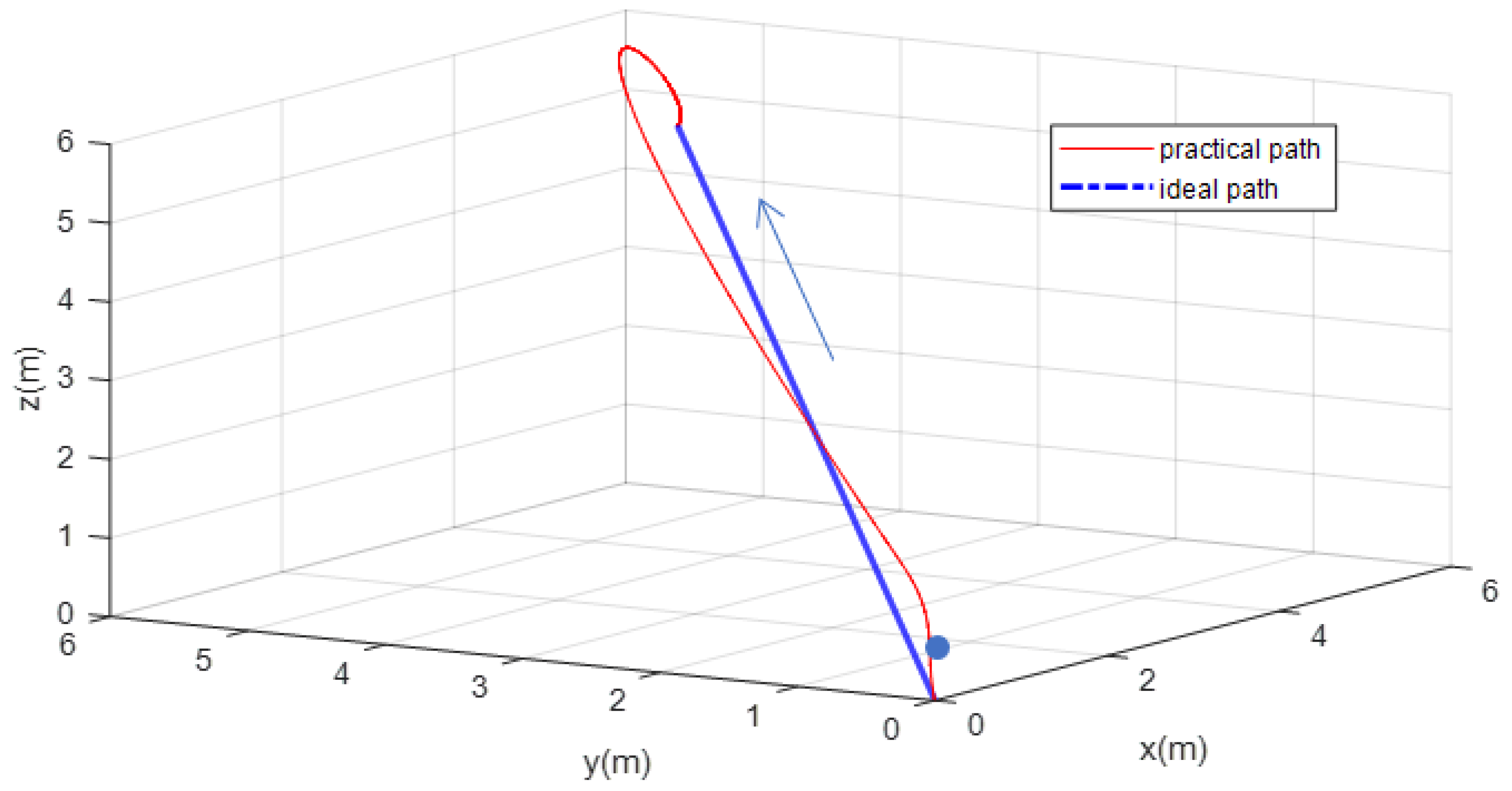
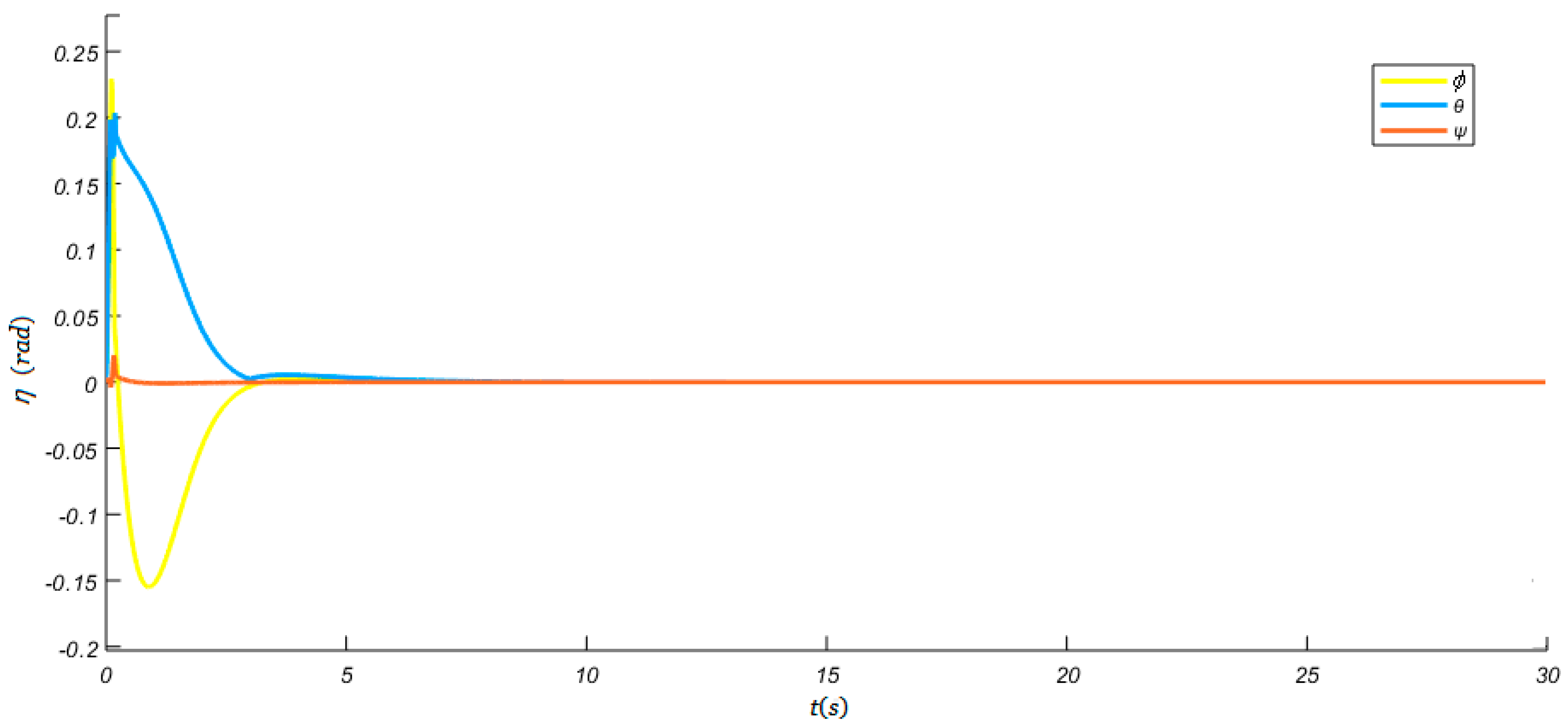
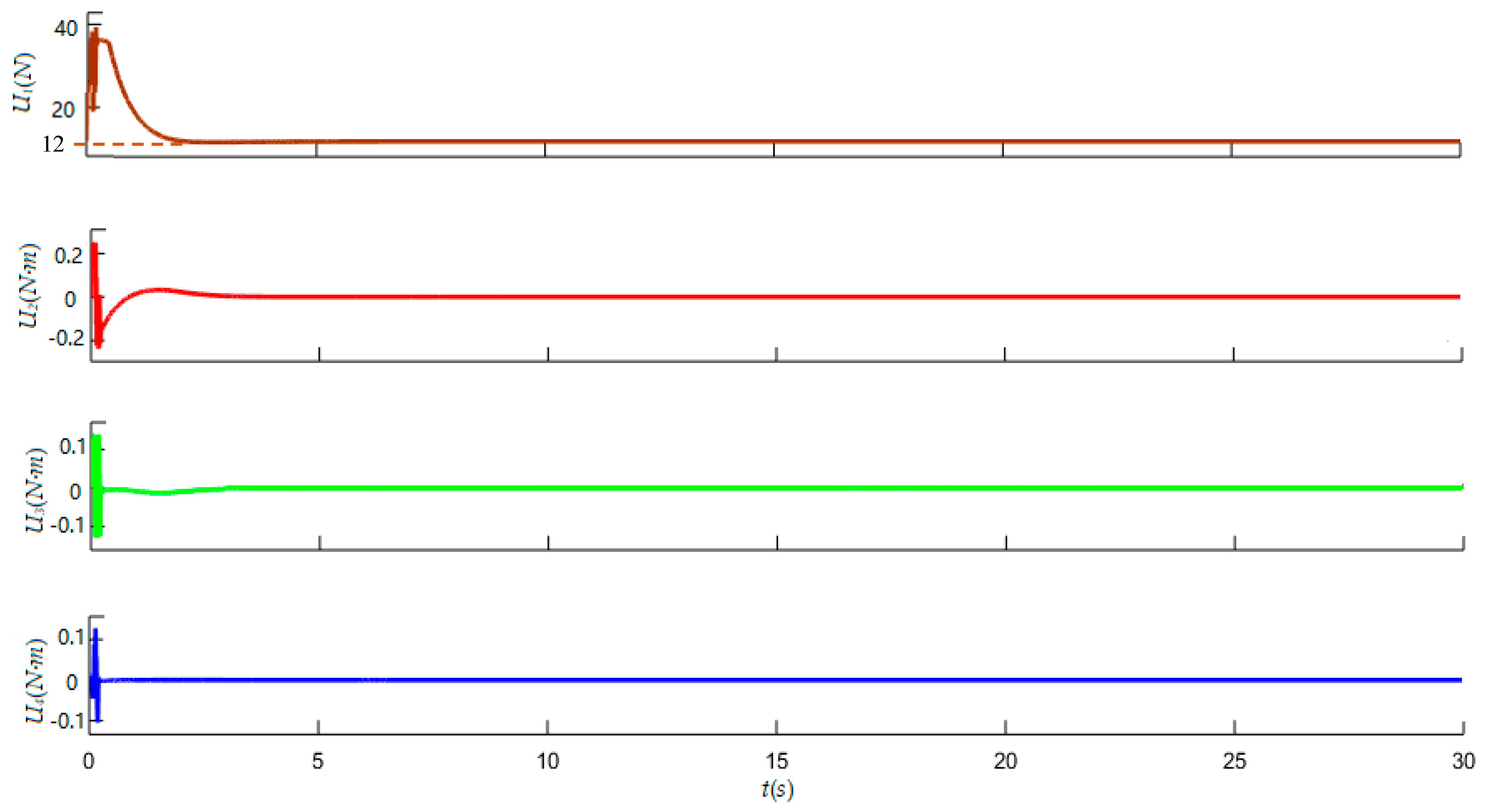
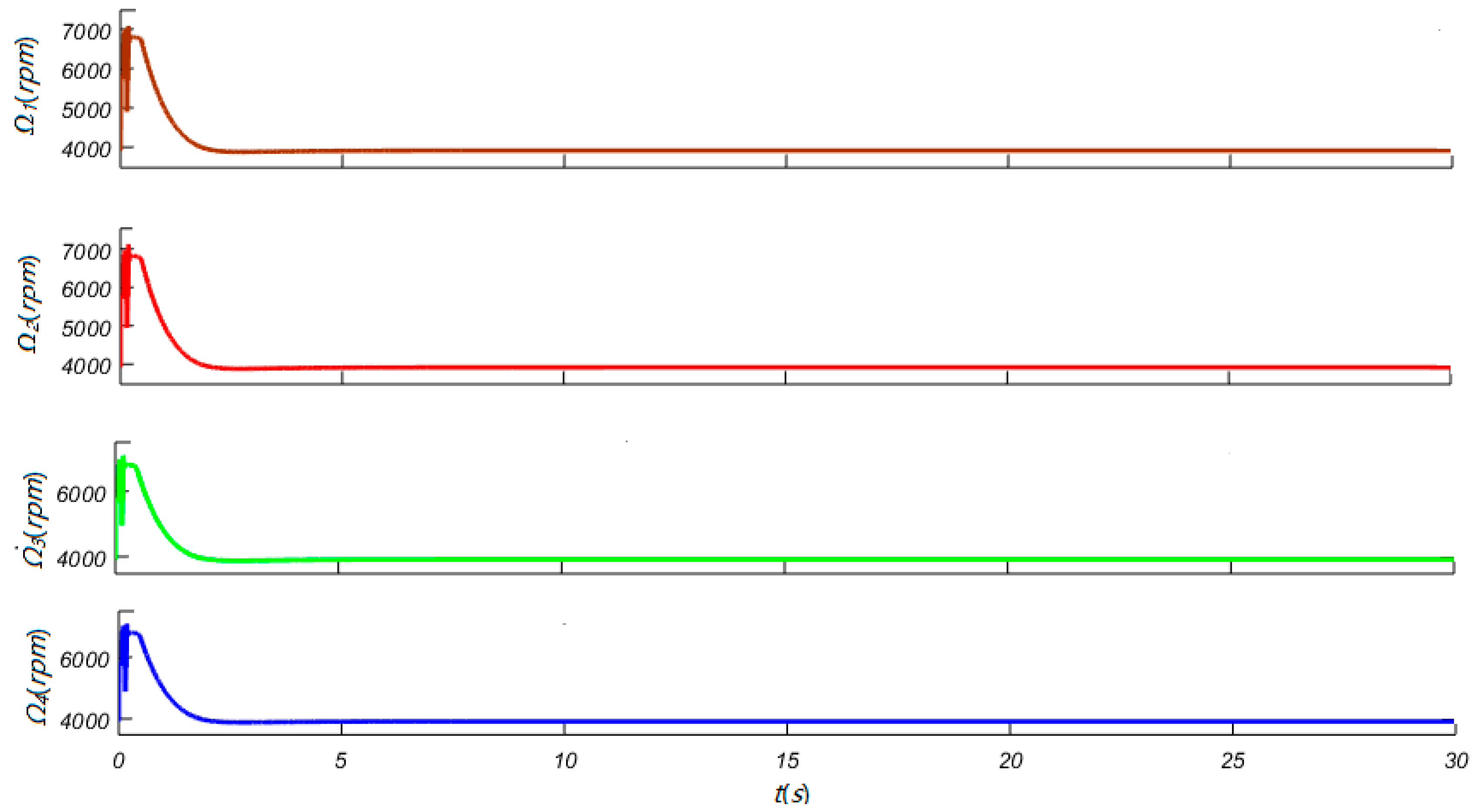
5.1. Air Position Response
5.2. Underwater Position Response
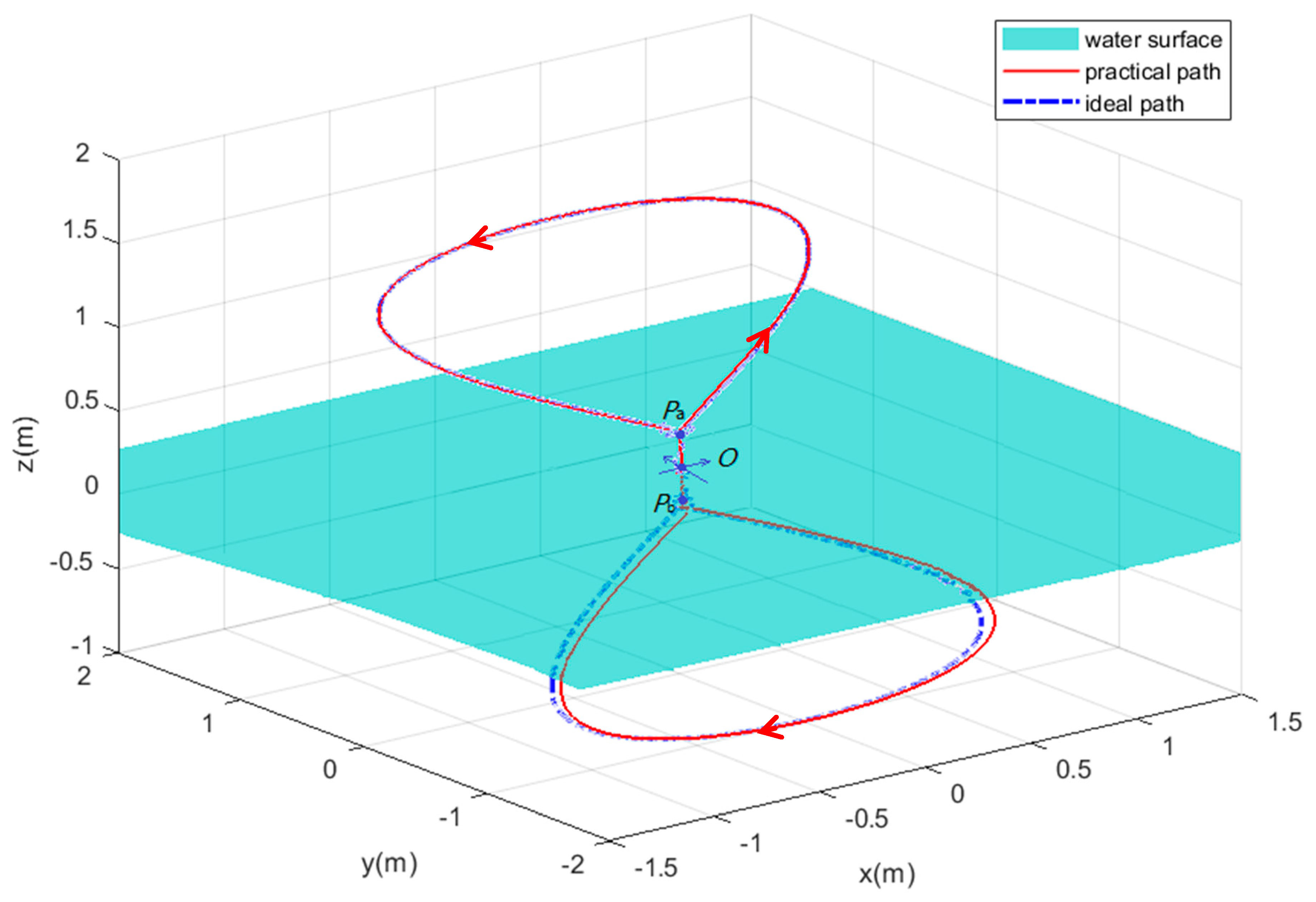
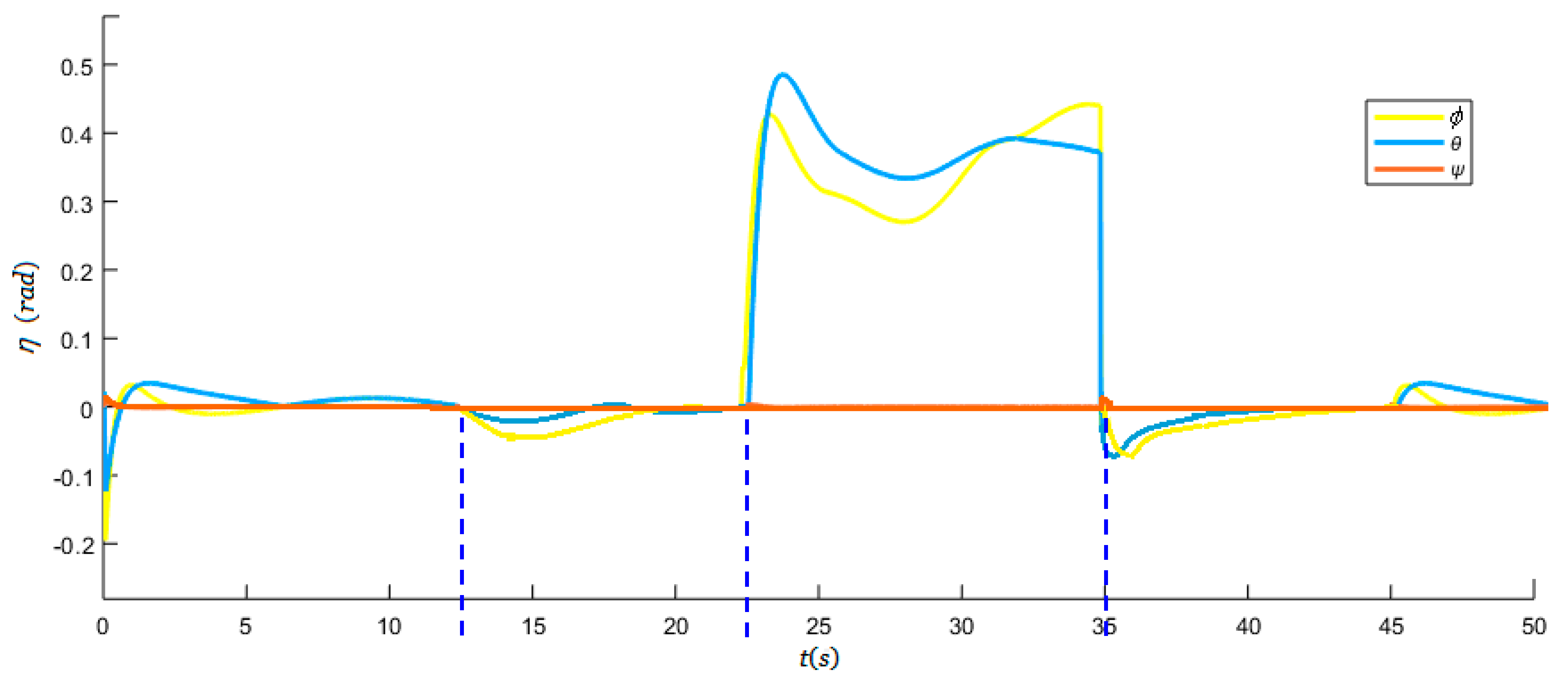
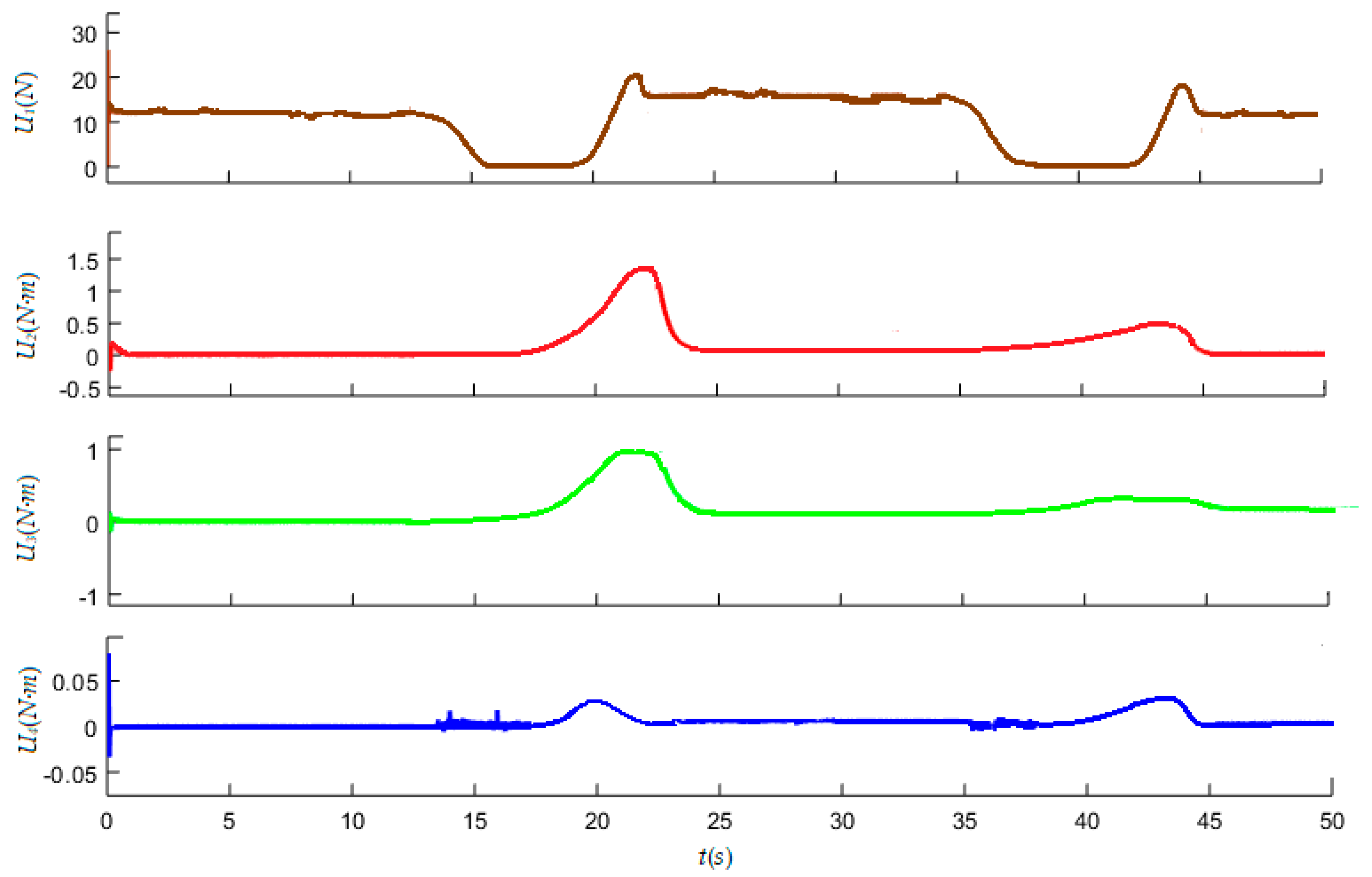
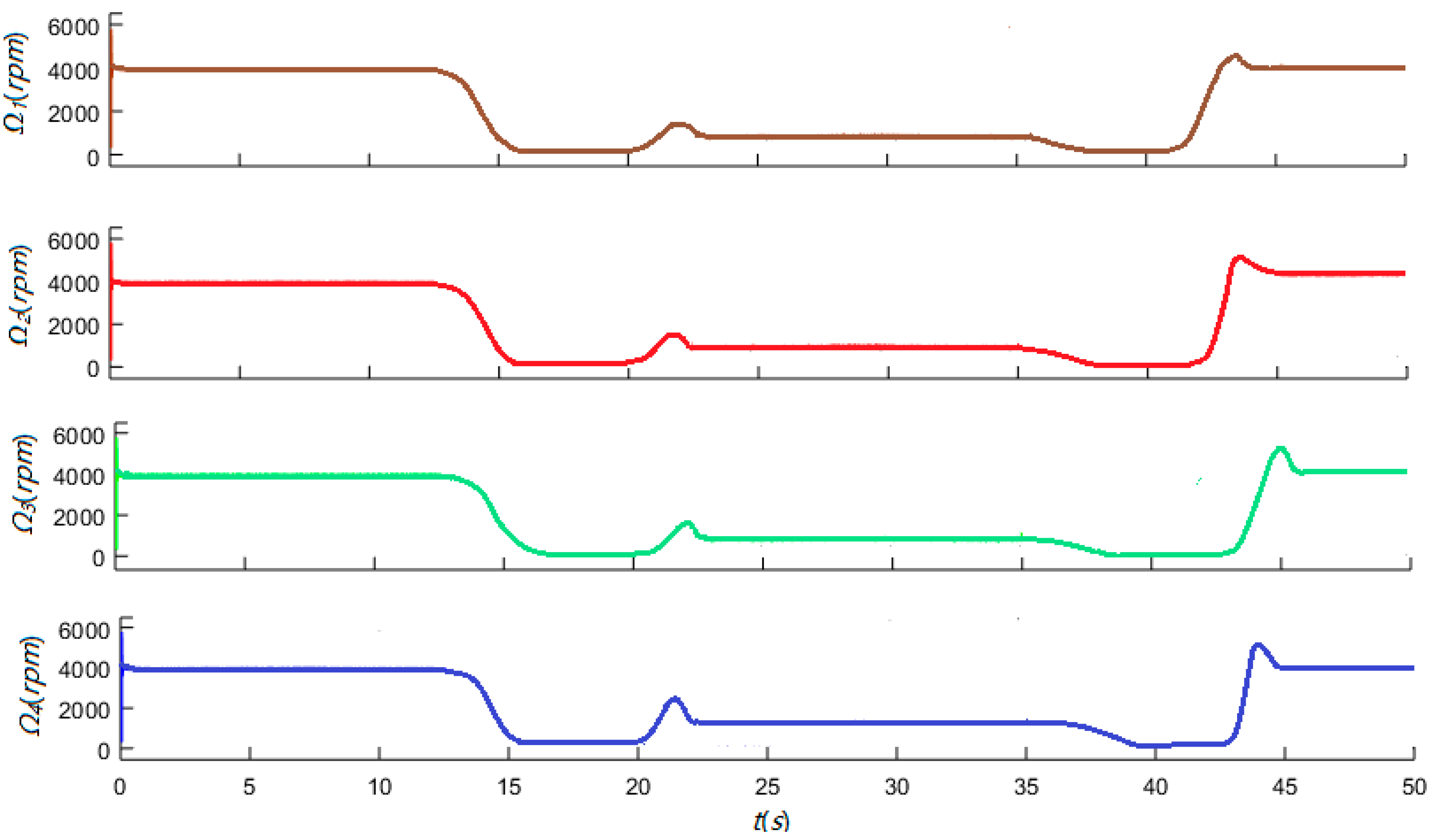
5.3. Aerial Underwater Vehicle Cross-Media Response
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Numerical Value |
|---|---|---|
| Mass of platform | 1.2 kg | |
| r | Radius of the propeller | 0.15 m |
| Length of arm | 0.19 m | |
| Propeller torque coefficient in air | 1.126 × 10−4 | |
| Propeller lift coefficient in air | 3.5 × 10−2 | |
| Propeller lift coefficient in water | 4.97 × 10−6 | |
| Propeller torque coefficient in water | 2.012 × 10−5 | |
| g | acceleration of gravity | 9.81 m/s2 |
| Motor and propeller moment of inertia | 8.61 × 10−4 kg/m2 | |
| Air density | 1.29 kg/m3 | |
| X direction area | 1.05 × 10−2 m2 | |
| Y direction area | 1.96 × 10−2 m2 | |
| Z direction area | 4.2 × 10−2 m2 | |
| Rotational inertia around the x-axis | 2.365 × 10−2 kg/m2 | |
| Rotational inertia around the y-axis | 1.318 × 10−2 kg/m2 | |
| Rotational inertia around the z-axis | 1.318 × 10−2 kg/m2 | |
| Water density | 1000 kg/m3 | |
| (xf, yf, zf) | Buoyancy center coordinates | (0, 0, −0.02) |
| No dimension resistance coefficient in water | 0.9 | |
| Resistance coefficient of rotation around the x-axis in water | 0.8 | |
| ky | Resistance coefficient of rotation around the y-axis in water | 1 |
| Resistance coefficient of rotation around the z-axis in water | 0.8 | |
| Volume | 2 × 10−3 m3 |
References
- Hildreth, E. Capturing Images of a Game by An Unmanned Autonomous Vehicle. U.S. Patent 15/397,286, 4 April 2019. [Google Scholar]
- Moud, H.I.; Shojae, A.; Flood, I. Current and Future Applications of Unmanned Surface, Underwater and Ground Vehicles in Construction. In Proceedings of the Construction Research Congress, New Orleans, LA, USA, 2–4 April 2018; pp. 106–115. [Google Scholar]
- Kaub, L.; Seruge, C.; Chopra, S.D.; Glen, J.M.G.; Teodorescu, M. Developing an autonomous unmanned aerial system to estimate field terrain corrections for gravity measurements. Lead. Edge 2018, 37, 584–591. [Google Scholar] [CrossRef]
- Zhong, Y.; Wang, X.; Xu, Y.; Wang, S.; Jia, T.; Hu, X.; Zhao, J.; Wei, L.; Zhang, L. Mini-UAV-Borne Hyperspectral Remote Sensing: From Observation and Processing to Applications. IEEE Geosci. Remote Sens. Mag. 2018, 6, 46–62. [Google Scholar] [CrossRef]
- Soriano, T.; Pham, H.A.; Ngo, V.H. Analysis of coordination modes for multi-UUV based on Model Driven Architecture. In Proceedings of the 2018 12th France-Japan and 10th Europe-Asia Congress on Mechatronics, Tsu, Japan, 10–12 September 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 189–194. [Google Scholar]
- Morishima, S.; Hatano, M.; Sugeta, K.; Kozasa, T.; Momose, T.C.; Tani, T.; Ojika, H.; Matsuhashi, M.; Azuma, T. Design Method, Design Device, and Design Program for Cross-Sectional Shape of Fuselage. U.S. Patent 16/099,468, 21 March 2019. [Google Scholar]
- Zhu, Z.; Guo, H.; Ma, J. Aerodynamic layout optimization design of a barrel-launched UAV wing considering control capability of multiple control surfaces. Aerosp. Sci. Technol. 2019, 93. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, G.; Zhuang, Y.; Hu, H. Autonomous Flight Control for Multi-Rotor UAVs Flying at Low Altitude. IEEE Access 2019, 7, 42614–42625. [Google Scholar] [CrossRef]
- Basri, M.A.M. Robust backstepping controller design with a fuzzy compensator for autonomous hovering quadrotor UAV. Iran. J. Sci. Technol. Trans. Electr. Eng. 2018, 42, 379–391. [Google Scholar] [CrossRef]
- Owen, M.; Beard, R.W.; McLain, T.W. Implementing dubins airplane paths on fixed-wing uavs. In Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2014; pp. 1677–1701. [Google Scholar] [CrossRef]
- Nguyen, H.V.; Chesser, M.; Koh, L.P.; Rezatofighi, S.H.; Ranasinghe, D.C. TrackerBots: Autonomous unmanned aerial vehicle for real-time localization and tracking of multiple radio-tagged animals. J. Field Robot. 2019, 36, 617–635. [Google Scholar] [CrossRef]
- Yuksek, B.; Vuruskan, A.; Ozdemir, U.; Yukselen, M.A.; Inlhan, G. Transition flight modeling of a fixed-wing VTOL UAV. J. Intell. Robot. Syst. 2016, 84, 83–105. [Google Scholar] [CrossRef]
- Kamal, A.M.; Serrano, A.R. Design methodology for hybrid (VTOL+ Fixed Wing) unmanned aerial vehicles. Aeronaut. Aerosp. Open Access J. 2018, 2, 165–176. [Google Scholar] [CrossRef]
- MahmoudZadeh, S.; Powers, D.M.W.; Zadeh, R.B. Introduction to autonomy and applications. In Autonomy and Unmanned Vehicles; Springer: Singapore, 2019; pp. 1–15. ISBN 978-981-13-2244-0. [Google Scholar]
- He, Y.; Zhu, L.; Sun, G.; Dong, M. Study on formation control system for underwater spherical multi-robot. Microsyst. Technol. 2019, 25, 1455–1466. [Google Scholar] [CrossRef]
- Bian, J.; Xiang, J. QUUV: A quadrotor-like unmanned underwater vehicle with thrusts configured as X shape. Appl. Ocean Res. 2018, 78, 201–211. [Google Scholar] [CrossRef]
- Aminur, R.B.A.M.; Hemakumar, B.; Prasad, M.P.R. Robotic Fish Locomotion & Propulsion in Marine Environment: A Survey. In Proceedings of the 2018 2nd International Conference on Power, Energy and Environment: Towards Smart Technology (ICEPE), Haryana, India, 2 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Kemp, M. Underwater Thruster Fault Detection and Isolation. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 1959. [Google Scholar] [CrossRef]
- Jin, S.; Kim, J.; Kim, J.; Seo, T. Six-degree-of-freedom hovering control of an underwater robotic platform with four tilting thrusters via selective switching control. IEEE/ASME Trans. Mechatron. 2015, 20, 2370–2378. [Google Scholar] [CrossRef]
- Alzu’bi, H.; Akinsanya, O.; Kaja, N.; Mansour, L.; Rawashdeh, O. Evaluation of an aerial quadcopter power-plant for underwater operation. In Proceedings of the 2015 10th International Symposium on Mechatronics and its Applications (ISMA), Sharjah, UAE, 8–10 December 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Maia, M.M.; Mercado, D.A.; Diez, F.J. Design and implementation of multirotor aerial-underwater vehicles with experimental results. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 961–966. [Google Scholar]
- Mercado, D.; Maia, M.; Diez, F.J. Aerial-underwater systems, a new paradigm in unmanned vehicles. J. Intell. Robot. Syst. 2019, 95, 229–238. [Google Scholar] [CrossRef]
- Neto, A.A.; Mozelli, L.A.; Drews, P.L.J.; Campos, M.F.M. Attitude control for an hybrid unmanned aerial underwater vehicle: A robust switched strategy with global stability. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 395–400. [Google Scholar]
- Ravell, D.A.M.; Maia, M.M.; Diez, F.J. Modeling and control of unmanned aerial/underwater vehicles using hybrid control. Control Eng. Pract. 2018, 76, 112–122. [Google Scholar] [CrossRef]
- Drews, P.L.J.; Neto, A.A.; Campos, M.F.M. Hybrid unmanned aerial underwater vehicle: Modeling and simulation. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 4637–4642. [Google Scholar]
- Shi, D.; Dai, X.; Zhang, X.; Quan, Q. A practical performance evaluation method for electric multicopters. IEEE/ASME Trans. Mechatron. 2017, 3, 1337–1348. [Google Scholar] [CrossRef]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; Wiley: New York, NY, USA, 1996; pp. 28–29. [Google Scholar]

















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Liu, Y.; Meng, Y.; Yu, S.; Zhuang, Y. System Modeling and Simulation of an Unmanned Aerial Underwater Vehicle. J. Mar. Sci. Eng. 2019, 7, 444. https://doi.org/10.3390/jmse7120444
Chen Y, Liu Y, Meng Y, Yu S, Zhuang Y. System Modeling and Simulation of an Unmanned Aerial Underwater Vehicle. Journal of Marine Science and Engineering. 2019; 7(12):444. https://doi.org/10.3390/jmse7120444
Chicago/Turabian StyleChen, Yuqing, Yaowen Liu, Yangrui Meng, Shuanghe Yu, and Yan Zhuang. 2019. "System Modeling and Simulation of an Unmanned Aerial Underwater Vehicle" Journal of Marine Science and Engineering 7, no. 12: 444. https://doi.org/10.3390/jmse7120444
APA StyleChen, Y., Liu, Y., Meng, Y., Yu, S., & Zhuang, Y. (2019). System Modeling and Simulation of an Unmanned Aerial Underwater Vehicle. Journal of Marine Science and Engineering, 7(12), 444. https://doi.org/10.3390/jmse7120444