Sea Urchins as an Inspiration for Robotic Designs


Abstract

1. Echinoderm Motor and Nervous Systems and How They Could Inspire Robotics
1.1. Central Nervous System
1.2. Tube Feet and Their Nervous Control
1.3. Spines and Their Nervous Control
1.4. Catch Apparatus
1.5. Pedicellariae
1.6. Nervous Control of Pedicellariae
1.7. Non-Centralized Nervous Control
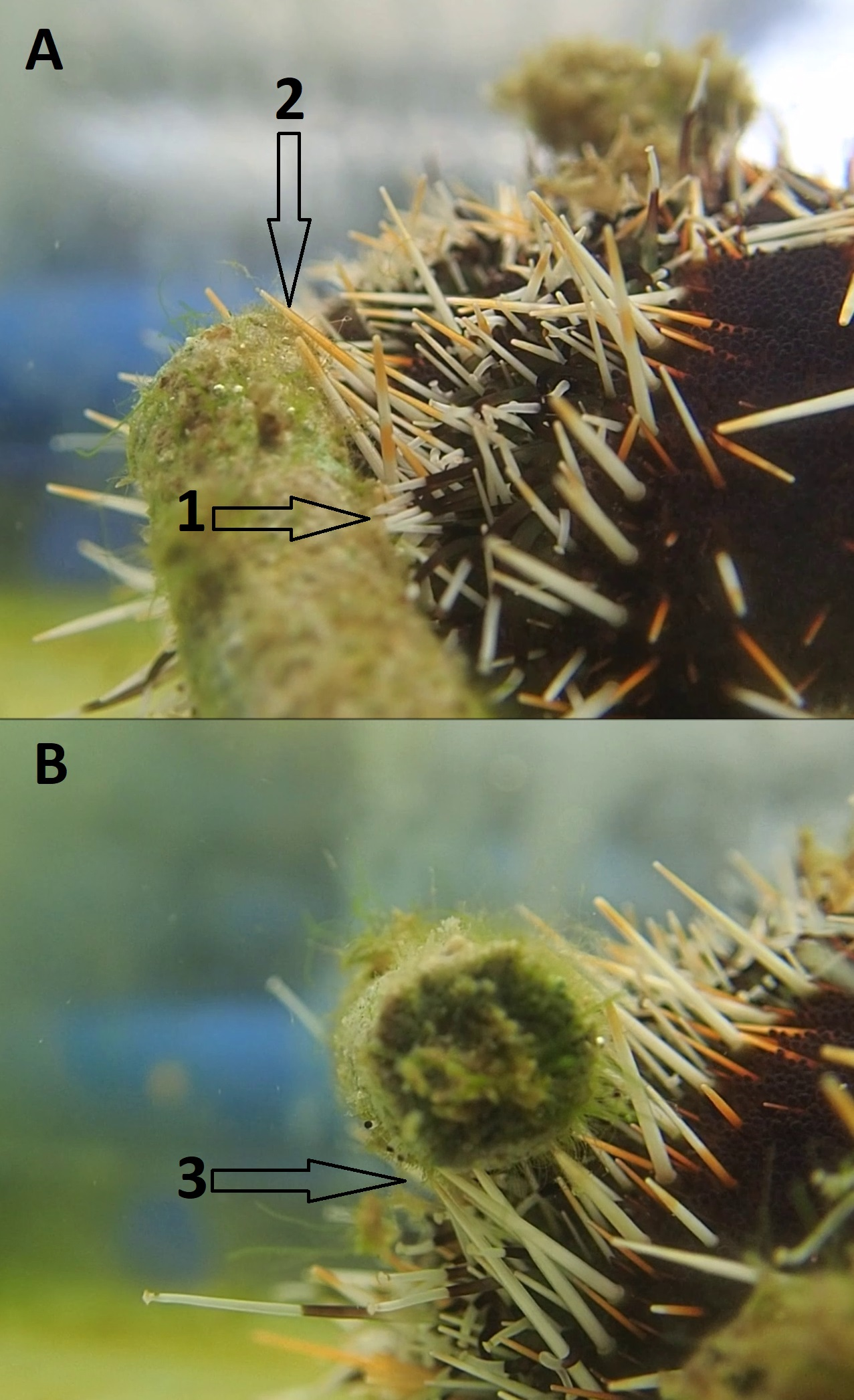
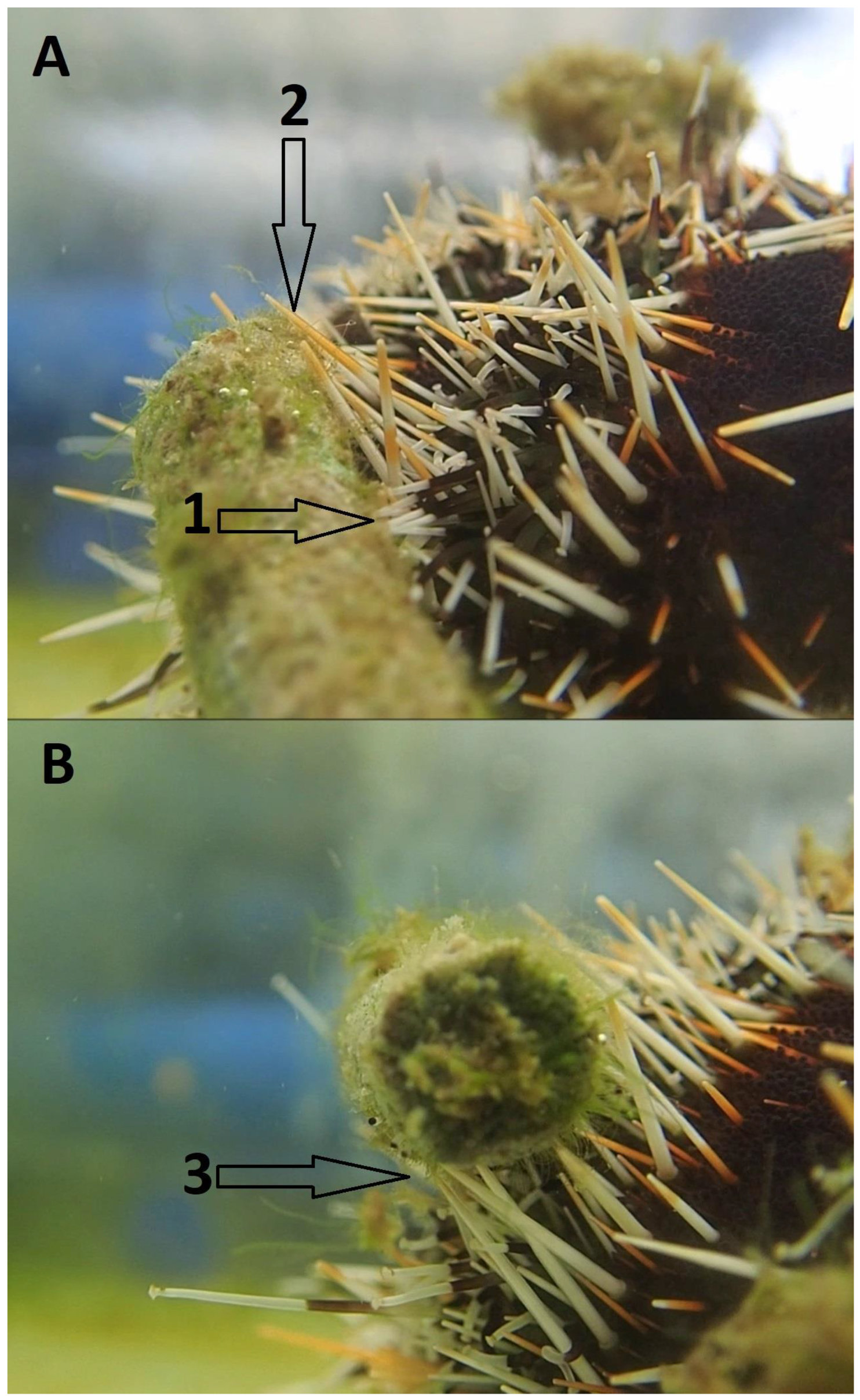
1.8. Covering Behavior
2. Current Echinoderm-Inspired Robotics
3. Interesting Principles from Sea Urchins to Adapt in Robotics
4. Possible Limitations
4.1. Restriction to Marine Environments
4.2. Slow Speed
4.3. Limited Size
5. Summary
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Allen, P.L. Feeding behaviour of Asterias rubens (L.) on soft bottom bivalves: A study in selective predation. J. Exp. Mar. Biol. Ecol. 1983, 70, 79–90. [Google Scholar] [CrossRef]
- Byrne, M.; Fontaine, A.R. The feeding behaviour of Florometra serratissima (Echinodermata: Crinoidea). Can. J. Zool. 1981, 59, 11–18. [Google Scholar] [CrossRef]
- Arendt, D.; Tosches, M.A.; Marlow, H. From nerve net to nerve ring, nerve cord and brain-evolution of the nervous system. Nat. Rev. Neurosci. 2016, 17, 61–72. [Google Scholar] [CrossRef] [PubMed]
- Smith, J. On the nervous system of the starfish Marthasterias glacialis (L.). Philos. Trans. R. Soc. Lond. B Biol. Sci. 1937, 227, 111–173. [Google Scholar] [CrossRef]
- Mashanov, V.S.; Zueva, O.R.; Heinzeller, T.; Aschauer, B.; Naumann, W.W.; Grondona, J.M.; Cifuentes, M.; Garcia-Arraras, J.E. The central nervous system of sea cucumbers (Echinodermata: Holothuroidea) shows positive immunostaining for a chordate glial secretion. Front. Zool. 2009, 6, 11. [Google Scholar] [CrossRef] [PubMed]
- Lowe, C.J.; Wray, G.A. Radical alterations in the roles of homeobox genes during echinoderm evolution. Nature 1997, 389, 718–721. [Google Scholar] [CrossRef] [PubMed]
- Sumrall, C.D.; Wray, G.A. Ontogeny in the fossil record: Diversification of body plans and the evolution of “aberrant” symmetry in Paleozoic echinoderms. Paleobiology 2007, 33, 149–163. [Google Scholar] [CrossRef]
- Mooi, R.; David, B. Radial symmetry, the anterior/posterior axis, and echinoderm Hox genes. Annu. Rev. Ecol. Evol. Syst. 2008, 39, 43–62. [Google Scholar] [CrossRef]
- Ziegler, A.; Faber, C.; Mueller, S.; Bartolomaeus, T. Systematic comparison and reconstruction of sea urchin (Echinoidea) internal anatomy: A novel approach using magnetic resonance imaging. BMC Biol. 2008, 6, 33. [Google Scholar] [CrossRef] [PubMed]
- Saucède, T.; Mooi, R.; David, B. Combining embryology and paleontology: Origins of the anterior-posterior axis in echinoids. Comptes. Rendus. Palevol. 2003, 2, 399–412. [Google Scholar] [CrossRef]
- Barras, C.G. Morphological innovation associated with the expansion of atelostomate irregular echinoids into fine-grained sediments during the Jurassic. Palaeogeogr. Palaeoclimatol. Palaeoecol. 2008, 263, 44–57. [Google Scholar] [CrossRef]
- Hejnol, A.; Lowe, C.J. Embracing the comparative approach: How robust phylogenies and broader developmental sampling impacts the understanding of nervous system evolution. Philos. Trans. R. Soc. B Biol. Sci. 2015, 370, 20150045. [Google Scholar] [CrossRef] [PubMed]
- Burke, R.D.; Angerer, L.M.; Elphick, M.R.; Humphrey, G.W.; Yaguchi, S.; Kiyama, T.; Liang, S.; Mu, X.; Agca, C.; Klein, W.H.; et al. A genomic view of the sea urchin nervous system. Dev. Biol. 2006, 300, 434–460. [Google Scholar] [CrossRef] [PubMed]
- Díaz-Balzac, C.A.; Lázaro-Peña, M.I.; Vázquez-Figueroa, L.D.; Díaz-Balzac, R.J.; García-Arrarás, J.E. Holothurian nervous system diversity revealed by neuroanatomical analysis. PLoS ONE 2016, 11, e0151129. [Google Scholar] [CrossRef] [PubMed]
- Weber, W.; Grosmann, M. Ultrastructure of the basiepithelial nerve plexus of the sea urchin, Centrostephanus longispinus. Cell Tissue Res. 1977, 175, 551–562. [Google Scholar] [CrossRef] [PubMed]
- Mashanov, V.S.; Zueva, O.R.; Garcia-Arraras, J.E. Organization of glial cells in the adult sea cucumber central nervous system. Glia 2010, 58, 1581–1593. [Google Scholar] [CrossRef] [PubMed]
- Märkel, K.; Röser, U. Functional anatomy of the valves in the ambulacral system of sea urchins (Echinodermata, Echinoida). Zoomorphology 1992, 111, 179–192. [Google Scholar] [CrossRef]
- Santos, R.; Hennebert, E.; Coelho, A.V.; Flammang, P. The echinoderm tube foot and its role in temporary underwater adhesion. In Functional Surfaces in Biology; Springer: Dordrecht, The Netherlands, 2009; pp. 9–41. [Google Scholar]
- Hennebert, E.; Haesaerts, D.; Dubois, P.; Flammang, P. Evaluation of the different forces brought into play during tube foot activities in sea stars. J. Exp. Biol. 2010, 213, 1162–1174. [Google Scholar] [CrossRef] [PubMed]
- Santos, R.; Flammang, P. Morphology and tenacity of the tube foot disc of three common European sea urchin species: A comparative study. Biofouling 2006, 22, 173–186. [Google Scholar] [CrossRef] [PubMed]
- Graham, J.B. Ecological and evolutionary aspects of integumentary respiration: Body size, diffusion, and the invertebrata. Am. Zool. 1988, 28, 1031–1045. [Google Scholar] [CrossRef]
- Lesser, M.P.; Carleton, K.L.; Bottger, S.A.; Barry, T.M.; Walker, C.W. Sea urchin tube feet are photosensory organs that express a rhabdomeric-like opsin and PAX6. Proc. R. Soc. B Biol. Sci. 2011, 278, 3371–3379. [Google Scholar] [CrossRef] [PubMed]
- Díaz-Balzac, C.A.; Abreu-Arbelo, J.E.; García-Arrarás, J.E. Neuroanatomy of the tube feet and tentacles in Holothuria glaberrima (Holothuroidea, Echinodermata). Zoomorphology 2010, 129, 33–43. [Google Scholar] [CrossRef] [PubMed]
- Mooi, R. Non-respiratory podia of clypeasteroids (Echinodermata, Echinoides): II. Diversity. Zoomorphology 1986, 106, 75–90. [Google Scholar] [CrossRef]
- Santos, R.; Gorb, S.; Jamar, V.; Flammang, P. Adhesion of echinoderm tube feet to rough surfaces. J. Exp. Biol. 2005, 208, 2555–2567. [Google Scholar] [CrossRef] [PubMed]
- McClintock, J.B.; Baker, B.J.; Slattery, M.; Hamann, M.; Kopitzke, R.; Heine, J. Chemotactic tube-foot responses of a spongivorous sea star Perknaster fuscus to organic extracts from antarctic sponges. J. Chem. Ecol. 1994, 20, 859–870. [Google Scholar] [CrossRef] [PubMed]
- Young, C.M.; Tyler, P.A.; Emson, R.H.; Gage, J.D. Perception and selection of macrophyte detrital falls by the bathyal echinoid Stylocidaris lineata. Deep Sea Res. Part I Oceanogr. Res. Pap. 1993, 40, 1475–1486. [Google Scholar] [CrossRef]
- Ullrich-Lüter, E.M.; Dupont, S.; Arboleda, E.; Hausen, H.; Arnone, M.I. Unique system of photoreceptors in sea urchin tube feet. Proc. Natl. Acad. Sci. USA 2011, 108, 8367–8372. [Google Scholar] [CrossRef] [PubMed]
- Agca, C.; Elhajj, M.C.; Klein, W.H.; Venuti, J.M. Neurosensory and neuromuscular organization in tube feet of the sea urchin Strongylocentrotus purpuratus. J. Comp. Neurol. 2011, 519, 3566–3579. [Google Scholar] [CrossRef] [PubMed]
- Al-Wahaibi, M.K.; Claereboudt, M.R. Extraocular vision in the sea urchin Diadema setosum. Mar. Freshw. Behav. Physiol. 2017, 50, 31–40. [Google Scholar] [CrossRef]
- Campbell, A.C.; Laverack, M.S. The responses of pedicellariae from Echinus esculentus (L.). J. Exp. Mar. Biol. Ecol. 1968, 2, 191–214. [Google Scholar] [CrossRef]
- Florey, E.; Cahill, M.A.; Rathmayer, M. Excitatory actions of GABA and of acetylcholine in sea urchin tube feet. Comp. Biochem. Physiol. Part C Comp. Pharmacol. 1975, 51, 5–12. [Google Scholar] [CrossRef]
- Berrios, A.; Brink, D.; del Castillo, J.; Smith, D.S. Some properties of the action potentials conducted in the spines of the sea urchin Diadema antillarum. Comp. Biochem. Physiol. A Comp. Physiol. 1985, 81, 15–23. [Google Scholar] [CrossRef]
- Peters, B.H. The innervation of spines in the sea-urchin Echinus esculentus L. Cell Tissue Res. 1985, 239, 219–228. [Google Scholar] [CrossRef]
- Santos, R.; Haesaerts, D.; Jangoux, M.; Flammang, P. The tube feet of sea urchins and sea stars contain functionally different mutable collagenous tissues. J. Exp. Biol. 2005, 208, 2277–2288. [Google Scholar] [CrossRef] [PubMed]
- Birenheide, R.; Tamori, M.; Motokawa, T.; Ohtani, M.; Iwakoshi, E.; Muneoka, Y.; Fujita, T.; Minakata, H.; Nomoto, K. Peptides controlling stiffness of connective tissue in sea cucumbers. Biol. Bull. 1998, 194, 253–259. [Google Scholar] [CrossRef] [PubMed]
- Yamada, A.; Tamori, M.; Iketani, T.; Oiwa, K.; Motokawa, T. A novel stiffening factor inducing the stiffest state of holothurian catch connective tissue. J. Exp. Biol. 2010, 213, 3416–3422. [Google Scholar] [CrossRef] [PubMed]
- Motokawa, T.; Fuchigami, Y. Coordination between catch connective tissue and muscles through nerves in the spine joint of the sea urchin Diadema setosum. J. Exp. Biol. 2015, 218, 703–710. [Google Scholar] [CrossRef] [PubMed]
- Díaz-Balzac, C.A.; Santacana-Laffitte, G.; San Miguel-Ruíz, J.E.; Tossas, K.; Valentín-Tirado, G.; Rives-Sánchez, M.; Mesleh, A.; Torres, I.I.; García-Arrarás, J.E. Identification of nerve plexi in connective tissues of the sea cucumber Holothuria glaberrima by using a novel nerve-specific antibody. Biol. Bull. 2007, 213, 28–42. [Google Scholar] [CrossRef] [PubMed]
- Mohd Jani, J.; Leary, M.; Subic, A.; Gibson, M.A. A review of shape memory alloy research, applications and opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Coppard, S.E.; Kroh, A.; Smith, A.B. The evolution of pedicellariae in echinoids: An arms race against pests and parasites. Acta Zool. 2012, 93, 125–148. [Google Scholar] [CrossRef]
- Cobb, J.L.S. The fine structure of the pedicellariae of Echinus esculentus (L.). J. R. Microsc. Soc. 1968, 88, 223–233. [Google Scholar] [CrossRef]
- Jangoux, M.; Lawrence, J.M. Echinoderm Studies Volume 1; Balkema; CRC Press: Boca Raton, FL, USA, 1983. [Google Scholar]
- Smith, D.P.B.; Bullock, T.H. Model nerve net can produce rectilinear, non-diffuse propagation as seen in the skin plexus of sea urchins. J. Theor. Biol. 1990, 143, 15–40. [Google Scholar] [CrossRef]
- Bullock, T.H. Comparative aspects of superficial conduction systems in echinoids and asteroids. Am. Zool. 1965, 5, 545–562. [Google Scholar] [CrossRef] [PubMed]
- Lees, D.C.; Carter, G.A. The covering response to surge, sunlight, and ultraviolet light in Lytechinus Anamesus (Echinoidea). Ecology 1972, 53, 1127–1133. [Google Scholar] [CrossRef]
- James, D.W. Diet, movement, and covering behavior of the sea urchin Toxopneustes roseus in rhodolith beds in the Gulf of California, México. Mar. Biol. 2000, 137, 913–923. [Google Scholar] [CrossRef]
- Dumont, C.P.; Drolet, D.; Deschênes, I.; Himmelman, J.H. Multiple factors explain the covering behaviour in the green sea urchin, Strongylocentrotus droebachiensis. Anim. Behav. 2007, 73, 979–986. [Google Scholar] [CrossRef]
- Barrett, G.; Revell, D.; Harding, L.; Mills, I.; Jorcin, A.; Stiefel, K.M. Tool use by four species of Indo-Pacific sea urchins. bioRxiv 2018, 347914. [Google Scholar] [CrossRef]
- Brothers, C.; Smith, K.; Amsler, M.; Aronson, R.; Singh, H.; McClintock, J. Covering behavior of deep-water echinoids in Antarctica: Possible response to predatory king crabs. Mar. Ecol. Prog. Ser. 2016, 553, 155–162. [Google Scholar] [CrossRef]
- Amato, K.R.; Emel, S.L.; Lindgren, C.A.; Sullan, K.M.; Wright, P.R.; Gilbert, J.J. Covering behavior of two co-occurring Jamaican sea urchins: Differences in the amount of covering and selection of covering material. Bull. Mar. Sci. 2008, 82, 255–261. [Google Scholar]
- Belleza, D.; Abao, R.; Taguba, C.; Dy, D. Effects of UV-C on the masking behavior of the green urchin Salmacis sphaeroides (Linnaeus, 1758). Philipp. Sci. 2013, 34–43. [Google Scholar]
- Pinckney, J.L.; Micheli, F. Microalgae on seagrass mimics: Does epiphyte community structure differ from live seagrasses? J. Exp. Mar. Biol. Ecol. 1998, 221, 59–70. [Google Scholar] [CrossRef]
- St Amant, R.; Horton, T.E. Revisiting the definition of animal tool use. Anim. Behav. 2008, 75, 1199–1208. [Google Scholar] [CrossRef]
- Mao, S.; Dong, E.; Xu, M.; Jin, H.; Li, F.; Yang, J. Design and development of starfish-like robot: Soft bionic platform with multi-motion using SMA actuators. In Proceedings of the IEEE Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 91–96. [Google Scholar]
- Prihastono, P.; Wicaksono, H.; Anam, K.; Effendi, R.; Adji, I.; Kuswadi, S.; Jazidie, A.; Sampei, M. Autonomous five legs robot navigation in cluttered environment using fuzzy q-learning and hybrid coordination node. In Proceedings of the IEEE Conference on 2009 ICCAS-SICE, Fukuoka, Japan, 18–21 August 2009; pp. 2871–2874. [Google Scholar]
- Watanabe, W.; Suzuki, S.; Kano, T.; Ishiguro, A. Moving right arm in the right place: Ophiuroid-inspired omnidirectional robot driven by coupled dynamical systems. In Proceedings of the IEEE/REJ Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 1895–1900. [Google Scholar]
- He, J.; Xu, L.; Song, X.; Luo, M.; Chu, J. The driving mechanism research of six unit soft robots. In Proceedings of the IEEE Conference on Robotics, Automation and Mechatronics (RAM), Shenzhen, China, 12–14 December 2013; pp. 79–83. [Google Scholar]
- Bell, M.A.; Pestovski, I.; Scott, W.; Kumar, K.; Jawed, M.K.; Paley, D.A.; Majidi, C.; Weaver, J.C.; Wood, R.J. Echinoderm-inspired tube feet for robust robot locomotion and adhesion. IEEE Robot. Autom. Lett. 2018, 3, 2222–2228. [Google Scholar] [CrossRef]
- Sadeghi, A.; Beccai, L.; Mazzolai, B. Design and development of innovative adhesive suckers inspired by the tube feet of sea urchins. In Proceedings of the IEEE Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 24–27 June 2012; pp. 617–622. [Google Scholar]
- Ocampo-Jiménez, J.; Muñoz-Meléndez, A.; Rodríguez-Gómez, G. Extending a spherical robot for dealing with irregular surfaces: A sea urchin-like robot. Adv. Robot. 2014, 28, 1475–1485. [Google Scholar] [CrossRef]
- Foxe, J.J.; Wylie, G.R.; Martinez, A.; Schroeder, C.E.; Javitt, D.C.; Guilfoyle, D.; Ritter, W.; Murray, M.M. Auditory-somatosensory multisensory processing in auditory association cortex: An fMRI study. J. Neurophysiol. 2002, 88, 540–543. [Google Scholar] [CrossRef] [PubMed]
- Beauchamp, M.S.; Argall, B.D.; Bodurka, J.; Duyn, J.H.; Martin, A. Unraveling multisensory integration: Patchy organization within human STS multisensory cortex. Nat. Neurosci. 2004, 7, 1190–1192. [Google Scholar] [CrossRef] [PubMed]
- Lakatos, P.; Chen, C.-M.; O’Connell, M.N.; Mills, A.; Schroeder, C.E. Neuronal oscillations and multisensory interaction in primary auditory cortex. Neuron 2007, 53, 279–292. [Google Scholar] [CrossRef] [PubMed]
- Engel, A.K.; Fries, P.; Singer, W. Dynamic predictions: Oscillations and synchrony in top–down processing. Nat. Rev. Neurosci. 2001, 2, 704–716. [Google Scholar] [CrossRef] [PubMed]
- Wilkie, I.C. Autotomy as a prelude to regeneration in echinoderms. Microsc. Res. Tech. 2001, 55, 369–396. [Google Scholar] [CrossRef] [PubMed]
- Arrichiello, F.; Liu, D.N.; Yerramall, S.; Pereira, A.; Das, J.; Mitra, U.; Sukhatme, G. Effects of underwater communication constraints on the control of marine robot teams. In Proceedings of the IEEE Conference on Robotic Communication and Coordination, Odense, Denmark, 31 March–2 April 2009; pp. 1–8. [Google Scholar]
- Seto, M.L.; Paull, L.; Saeedi, S. Marine Robot Autonomy; Springer: New York, NY, USA, 2013. [Google Scholar] [CrossRef]
- Domenici, P.; Gonzlez-Caldern, D.; Ferrari, R.S. Locomotor performance in the sea urchin Paracentrotus lividus. J. Mar. Biol. Assoc. UK 2003, 83, 285–292. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
| Advantage | Reason | Disadvantage | Reason |
|---|---|---|---|
| Graceful degradation in the face of damage. | Skin-based elements semi-autonomous. | Slow speed | Difficulties in coordinating semi-autonomous elements quickly. |
| Scalability | Skin-based elements semi-autonomous. | Limited maximum size | Difficulties in coordinating large numbers of semi-autonomous elements. |
| Ease of programming. | Need to optimize a limited number of elements. | - | - |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stiefel, K.M.; Barrett, G.A. Sea Urchins as an Inspiration for Robotic Designs. J. Mar. Sci. Eng. 2018, 6, 112. https://doi.org/10.3390/jmse6040112
Stiefel KM, Barrett GA. Sea Urchins as an Inspiration for Robotic Designs. Journal of Marine Science and Engineering. 2018; 6(4):112. https://doi.org/10.3390/jmse6040112
Chicago/Turabian StyleStiefel, Klaus M., and Glyn A. Barrett. 2018. "Sea Urchins as an Inspiration for Robotic Designs" Journal of Marine Science and Engineering 6, no. 4: 112. https://doi.org/10.3390/jmse6040112
APA StyleStiefel, K. M., & Barrett, G. A. (2018). Sea Urchins as an Inspiration for Robotic Designs. Journal of Marine Science and Engineering, 6(4), 112. https://doi.org/10.3390/jmse6040112