1. Introduction
Roll-on/Roll-off (Ro-Ro) passenger vessels are crucial for regional transportation across coastal areas, straits, and rivers due to their efficiency and environmental benefits [
1]. These vessels allow vehicles to drive on and off using ramps, providing flexibility for both passengers and cargo. With the global rise in electric vehicle (EV) adoption, roll-on/roll-off passenger vessels that transport electric vehicles (Ro-Ro EVs) have become increasingly important.
Transporting EVs introduces unique safety and operational challenges due to the specific risks associated with lithium-ion batteries and vessel design. Unlike conventional vehicles, EVs are equipped with high-capacity lithium-ion batteries that are susceptible to thermal runaway, posing significant fire and explosion risks. These risks are amplified in the confined spaces of Ro-Ro vessels. Limited ventilation and restricted fire suppression capabilities on Ro-Ro vessels can lead to rapid heat buildup and the accumulation of toxic gasses during a fire. Additionally, the special loading and securing requirements of EVs, combined with their battery sensitivity to physical impacts, complicate safety protocols. The integration of charging infrastructure on board further adds electrical and safety complexities. These factors demand tailored and advanced risk assessment methodologies, and improved emergency response strategies, to ensure the safe transportation of EVs on Ro-Ro vessels.
The growing number of passengers and EVs on board these vessels significantly increases fire hazards. This is further underscored by recent fire incidents. For instance, in November 2023, a fire aboard a Ro-Ro EV vessel, triggered by a lithium-ion battery, caused severe damage to the vessel and resulted in the death of a crew member. Similarly, in July 2023, a fire during EV loading led to fatalities and injuries among firefighters. These incidents highlight the severe and potentially catastrophic nature of EV-related fires on ships. These shipboard fires not only endanger personnel but also pose substantial risks to the vessel’s integrity [
2,
3]. While past incidents may be few, the potential consequences of an EV fire or explosion on a Ro-Ro passenger vessel are severe and difficult to control once initiated. As the number of EVs continues to grow, the frequency of such events is likely to increase. This intensifies the need for a comprehensive and proactive risk assessment. The unique fire hazards posed by lithium-ion batteries significantly impact fire dynamics and emergency response strategies in maritime environments. The critical safety concerns and increasing frequency of such incidents, alongside the growing adoption of EVs, make it crucial to assess the full fire hazard chain risks of transporting EVs on Ro-Ro vessels.
Although significant research has focused on shipboard fires in tankers, bulk carriers, and conventional Ro-Ro vessels, the specific fire risks associated with Ro-Ro EVs remain underexplored. The unique nature of lithium-ion batteries, combined with the presence of both vehicles and passengers, complicates firefighting and evacuation procedures. Therefore, it is crucial to understand how fire risks evolve at different stages and identify key risk factors to enhance safety measures on Ro-Ro EVs.
Furthermore, the transportation of EVs on Ro-Ro vessels is still a relatively new practice, with limited fire incident data compared to other cargo types. As a result, traditional fire risk assessment methods, such as fault tree analysis (FTA), Bayesian networks (BNs), and Monte Carlo Simulation, are inadequate for addressing the complex AND/OR relationships among fire causation factors. These methods are also limited in evaluating risk probabilities throughout the fire hazard chain, based solely on accident reports.
To address these gaps, this study proposes an integrated approach that combines FTA with fuzzy Bayesian network (FBN) to assess fire risks at each stage of a fire hazard chain for Ro-Ro EVs. Fault trees are developed to map and decompose the complex fire causation pathways of Ro-Ro EVs with logical gates. These fault tress visualize the multi-stage progression of fire events. This structured analysis forms the basis for the FBN, which incorporates fuzzy theory and expert knowledge to estimate probabilities in cases where data on multi-stage fire incidents are limited. The integration of FTA and FBN allows for a precise risk propagation analysis, and identification of critical failure points at each stage, and supports targeted prevention strategies. This methodology is particularly well suited to addressing the emerging and complex fire hazard chain risks associated with Ro-Ro EVs. The key questions guiding this research are as follows: (1) What are the main causal chains of fire hazards on Ro-Ro EVs across all stages of an incident? (2) How do fire risk probabilities evolve at each stage of an incident on Ro-Ro EVs? (3) What are the critical risk factors at each stage? (4) How should stakeholders mitigate and control fire hazards on Ro-Ro EVs?
This study contributes theoretically by integrating fault tree analysis (FTA) and fuzzy Bayesian network (FBN) to model fire hazard chain mechanisms and assess risk probability for Ro-Ro EVs. It offers a comprehensive framework that addresses the complexities of fire risk propagation and uncertainties related to emerging EV fire hazards in maritime environments. This research is crucial for improving safety protocols, emergency response strategies, and regulatory frameworks for the safe transportation of EVs on Ro-Ro vessels. By addressing potential fire hazards in a proactive and systematic way, our work provides essential insights into ensuring the safe integration of EVs in maritime operations.
The remainder of this paper is organized as follows.
Section 2 reviews the relevant literature.
Section 3 outlines the data and methodology.
Section 4 and
Section 5 present the results and their implications.
Section 6 concludes the paper.
2. Literature Review
Table 1 summarizes studies on fire risk assessment relevant to Ro-Ro vessels.
2.1. Fire Risk Assessment of Ro-Ro Vessels
Most research has assessed overall fire hazard risk for conventional ship types, including tankers [
4,
17], bulk carriers [
8,
16], container ships [
7], general vessels [
6,
15], cruise ships [
20], and ship engine rooms [
9]. Recent studies have begun to investigate fire risks in Ro-Ro vessels [
10,
14,
21], but the integration of EVs into fire risk models is still limited. Fire risks associated with Ro-Ro vessels, particularly those transporting EVs, remain underexplored. The unique hazards of lithium-ion batteries on the confined spaces of Ro-Ro vessels are not addressed. Many studies fail to incorporate multi-stage hazard chain risk assessments, which consider the entire lifecycle of the fire event, from ignition to propagation, particularly in the case of lithium-ion battery fires.
This study seeks to fill this gap by identifying fire hazard chain risk factors and providing a comprehensive risk assessment for Ro-Ro vessels transporting EVs. The transportation of EVs introduces new challenges to fire risk assessment. The unique hazards of lithium-ion batteries can significantly affect fire dynamics and complicate emergency response strategies. Therefore, integrated risk assessment models are urgently needed to address both the specific fire hazards of EVs and the multi-stage evaluation of fire incidents on Ro-Ro vessels.
2.2. Key Factors in Shipboard Fire Risk Assessment
Current research on fire risk assessment has primarily focused on factors related to the vessel and crew [
6,
18]. Some studies also consider environmental factors like weather and sea waves [
14], ventilation [
11,
21], and geographical location (latitude/longitude) [
19]. A few studies considered the impact of cargo, such as cargo distribution [
11], or vehicle arrangement on fire risk [
21]. However, factors related to cargo securing have received less attention. Additionally, some studies on fire risks in Ro-Ro passenger vessels have addressed crew- and passenger-related risk factors. Bao et al. (2023) considered the impact of vehicle owner behavior, but their study did not focus on electric vehicles [
10]. The transportation of EVs introduces unique fire risks, such as thermal runaway in lithium-ion batteries, battery malfunctions, charging issues, and fire spread. These new risks are not fully captured by existing models.
This study aims to address these gaps by introducing a comprehensive, multi-stage fire hazard chain risk assessment model. The model integrates traditional fire risks with those specific to EV transportation. It also incorporates risk factors related to passenger and vehicle owner behaviors, the surrounding environment, and vehicle securing methods. This approach allows for the development of a more complete fire risk profile for EV transportation on Ro-Ro vessels.
2.3. Ship Fire Risk Assessment Methods
The primary methods for assessing shipboard fire hazard chain risks include fault tree analysis (FTA) [
22], Bayesian networks (BNs) [
16], and Monte Carlo Simulation (MCS) [
11]. Each of these approaches offers unique advantages. But they also have limitations when applied to the complex, multi-stage fire risks associated with Ro-Ro EVs.
FTA is widely used for identifying and evaluating system failures by analyzing events that lead to an undesirable outcome. It provides a clear visualization of risk factors and their relationships, making it effective for qualitative assessment. However, FTA struggles to quantify probabilities for emerging risks, such as EV fires, due to the lack of sufficient historical accident data.
BN models the probability of different outcomes based on conditional dependencies. This allows for the inclusion of uncertainty in risk assessment. Nevertheless, BN alone may fall short in capturing the complex, multi-stage causal relationships involved in fire escalation, especially in novel scenarios like EV transportation, where data are limited.
MCS offers an additional advantage by modeling complex systems with random variables. It is useful for modeling environmental factors like weather and sea waves. However, MCS struggles to model the interactions between new risk factors and their impact on the fire hazard chain.
To address these limitations, this study proposes an integrated approach using FTA and a fuzzy Bayesian networks (FBN) to evaluate the fire hazard chain risk involving Ro-Ro vessels transporting EVs. This combined approach is driven by several key factors.
FTA effectively integrates the three fundamental fire elements—fuel, heat, and oxygen—using logical gates. This enables precise modeling of their interdependencies and facilitates targeted risk mitigation strategies.
The clear and systematic visualization of accident causal paths provided by FTA helps break down complex fire hazards into intermediate and basic events. This decomposition enhances the understanding of risk factors and aids in the development of the FBN.
The FBN enables the estimation of fire hazard chain risk probabilities, particularly for emerging risks with limited historical data. Given the newness of Ro-Ro vessels carrying EVs, expert opinions are crucial for identifying unique risk factors, understanding causal relationships, and estimating probabilities.
2.4. Summary
(1) Limited Focus on Ro-Ro Vessels with EVs.
Existing research on fire risk assessment primarily focused on conventional vessels such as bulk carriers, container ships, and cruise ships, addressing overall fire hazards and mitigation strategies. Research specific to Ro-Ro vessels transporting EVs is still limited. This gap is particularly evident when considering the unique fire hazards associated with lithium-ion batteries and the confined spaces typical of Ro-Ro vessels.
(2) Inadequate Fire Hazard Chain Risk Assessment.
Many existing studies do not incorporate multi-stage hazard chain risk assessments, which are crucial for understanding the entire lifecycle of a fire event—from ignition to propagation. This is especially important in the case of lithium-ion battery fires, which introduce new complexities that current models fail to address comprehensively.
(3) Limitations of Current Fire Risk Models.
FTA: While FTA is effective for identifying system failures and visualizing risk factors, it struggles to quantify probabilities for emerging risks, such as EV fires, due to the lack of sufficient historical accident data.
BN: BN is valuable for incorporating uncertainty in risk assessments, but it may not fully capture the complex, multi-stage causal relationships involved in fire escalation, especially in novel scenarios like EV transportation.
MCS: MCS is useful for modeling uncertain environmental factors, but it has difficulty in modeling the interactions between new risk factors (such as EV-specific hazards) and their impact on the fire hazard chain.
This study addresses the limitations of current fire risk assessment models by proposing an integrated approach that combines FTA with FBN to evaluate the complete fire hazard chain risk for Ro-Ro vessels transporting EVs. The key advantages of the FTA-FBN model include
Effective Integration of Key Fire Elements: FTA enables precise modeling of the interdependencies between the three fundamental fire elements (fuel, heat, and oxygen), facilitating targeted risk mitigation strategies.
Clear Visualization of Causal Paths: FTA helps break down complex fire risk scenarios into intermediate and basic events, enhancing the understanding of risk factors and aiding the development of the FBN model.
Detailed Analysis of Fire Hazard Chain Risk Propagation: The FBN model enables a thorough examination of fire risk chain probability.
Incorporation of Expert Opinions: Given the lack of detailed historical data on Ro-Ro vessels carrying EVs, expert opinions are essential for identifying unique risk factors and estimating probabilities. This helps fill gaps in the current risk assessment models and strengthens the overall evaluation.
By integrating traditional fire risks with those specific to EV transportation, this study offers a more comprehensive and dynamic risk assessment approach for Ro-Ro vessels, making a significant contribution to the existing body of research.
3. Materials and Methods
This paper examines the fire hazard chain mechanisms of Ro-Ro EVs and evaluates the associated risks using FTA and FBN, as illustrated in
Figure 1.
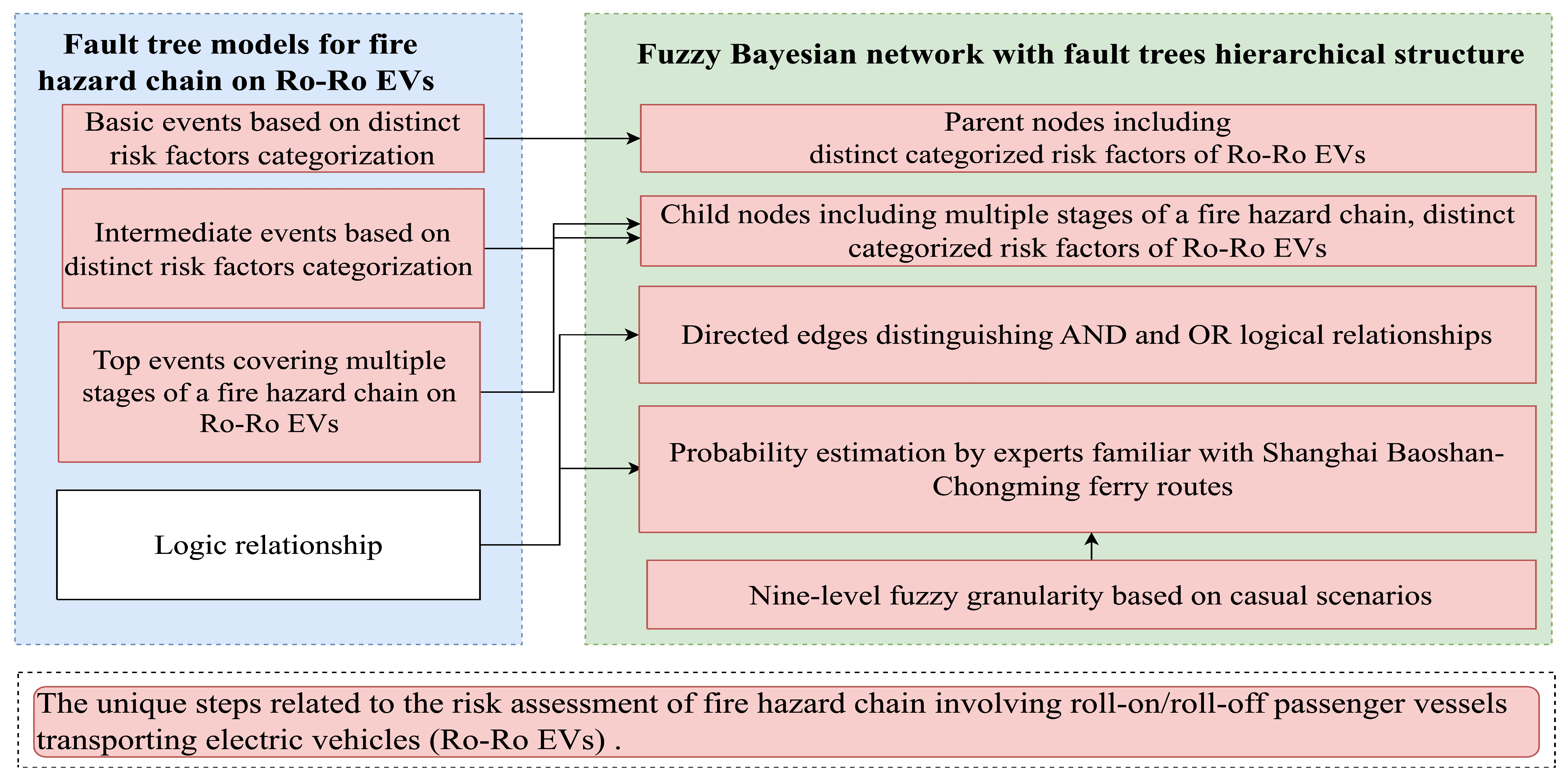
The steps and distinctive features of the FTA-FBN model for evaluating the fire hazard chain risk of Ro-Ro EVs are outlined below:
Stage 1: Data Preparation
Given the novelty of transporting EVs on Ro-Ro vessels and limited accident data, it is challenging to analyze the fire hazard chain mechanism and estimate risk probabilities. Thus, a two-step data preparation process is employed:
(1) Collection of Fire Accident Reports: Fire accident reports from all vessels operating in Chinese waters between 2013 and 2023 are collected. These reports serve as the foundation for constructing the fault trees and establishing the FBN structure.
(2) Expert Consultation: Five experts from the Shanghai Maritime Safety Administration, with extensive knowledge of the Shanghai Baoshan–Chongming Ro-Ro ferry route transporting EVs, are consulted. Their expertise is crucial for identifying the unique fire risks associated with Ro-Ro EVs, distinguishing them from risks posed by other vessel types and cargo. These experts also assist in refining the fault tree events and their logical relationships (AND/OR), based on both expert knowledge and the existing literature.
Stage 2: Fault Tree Analysis (FTA)
FTA is employed to identify and analyze fire hazard chain mechanisms at various stages on Ro-Ro EVs. The fault tree models are subsequently converted into an FBN for a fire hazard chain risk analysis.
The key advantages of using FTA and its conversion into an FBN for fire hazard chain risk assessment are as follows. (1) Integration of Key Fire Elements: The FTA systematically incorporates the three key fire elements—fuel, heat, and oxygen—through logical gates to model their interdependencies. This facilitates precise risk mitigation. (2) Clear Visualization of Accident Casual Paths: The FTA breaks down complex casual paths into intermediate and basic events, providing a clear and visual representation. This decomposition aids in the construction of the FBN [
23]. (3) Analysis of Hazard Chain Risk Propagation: The model allows for a detailed analysis of how risks propagate over time, identifying critical failure points where preventive interventions can be applied.
The novelty of the FTA model lies in its comprehensive, multi-dimensional approach to modeling the fire hazard chain on Ro-Ro EVs. (1) Unlike traditional models that focus on a single phase or fault tree, this study develops multiple fault trees that capture the various stages of the fire hazard chain—from ignition to the full involvement of the vessel. (2) The model goes beyond conventional risk factors, which typically consider only the vessel, crew, and environmental factors. It also incorporates risks unique to EVs, such as lithium-ion batteries, chargers, and vehicle-specific components. Additionally, the model accounts for risks stemming from owner behavior, passenger actions, vehicle securing practices, and the performance of fire detection and suppression systems. (3) Expert opinions are integrated to refine the analysis of top events, intermediate events, and bottom events across multi-stage fault trees, providing a holistic understanding of the fire risk dynamics in the context of Ro-Ro EVs.
Stage 3: FBN Development
The fault tree models are used to construct an FBN, incorporating fuzzy theory to gather expert opinions and estimate the probabilities of network nodes, which are crucial for assessing fire hazard chain risks on Ro-Ro EVs.
The FBN model is characterized by several distinctive features.
Network Structure: (1) The FBN is structured to evaluate risks across multiple stages of the fire hazard chain, rather than focusing on a single phase. (2) It combines multi-stage fault trees into a hierarchical structure, as opposed to a single-layer or cyclic structure. (3) Different colors are used to categorize risk factors, enabling the clearer visualization of their roles at each stage. (4) The FBN also employs both straight and curved arrows to represent the logical relationships between factors, illustrating both “AND” and “OR” connections.
Probability Estimation: (1) Due to the limited number of fire accident reports involving Ro-Ro EVs, the model incorporates fuzzy evaluations of prior and conditional probabilities. These are based on expert opinions from five professionals familiar with the Shanghai Baoshan–Chongming Ro-Ro route. (2) Unlike traditional 5-level fuzzy scoring methods, a more granular 9-level fuzzy scoring method is employed. This approach provides a finer resolution, offering a more accurate representation of causal relationships.
3.1. Data Preparation
This study adopts a two-step approach to collect and validate data to construct Ro-Ro EV fire fault trees and estimate FBN node probabilities.
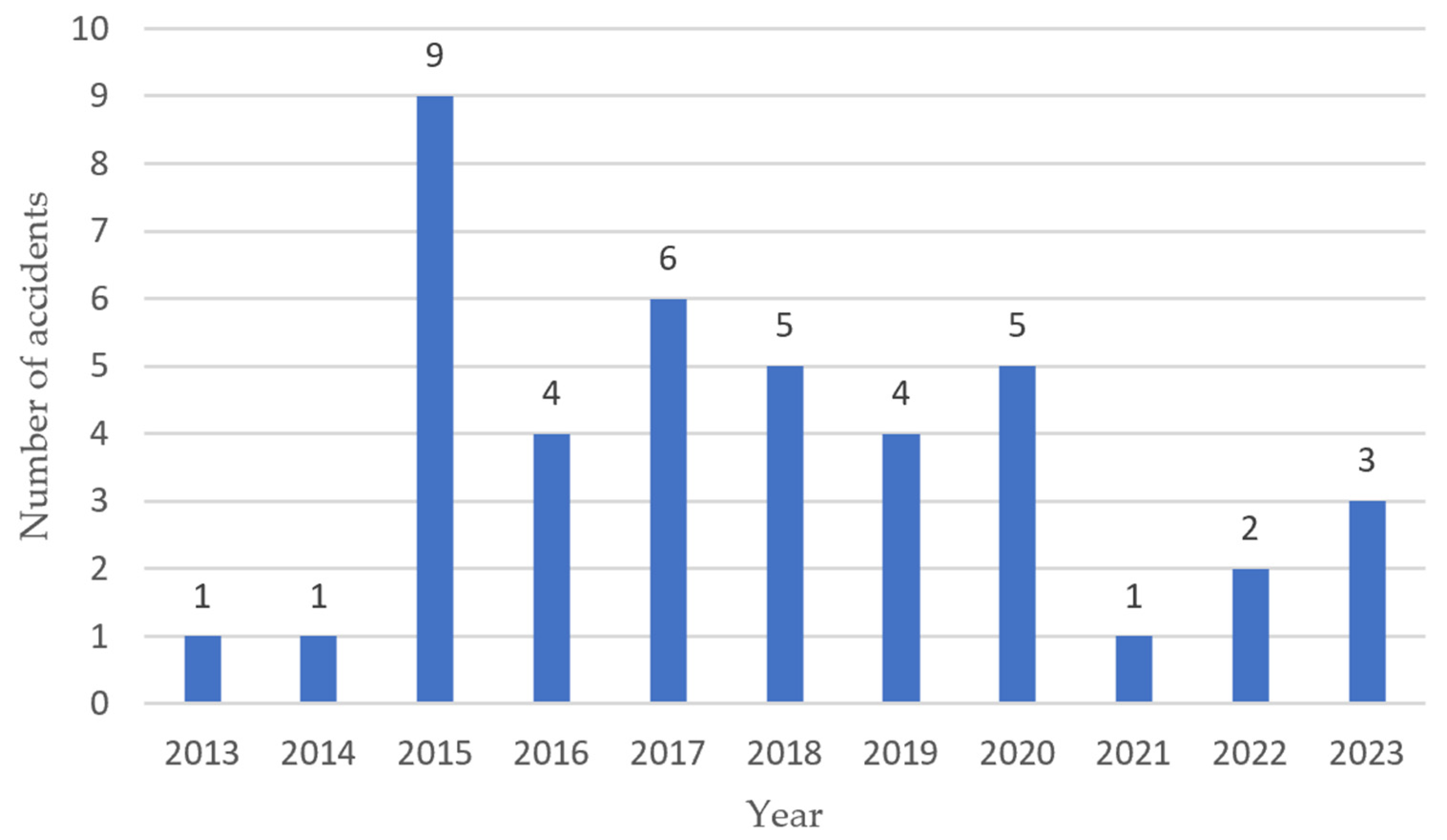
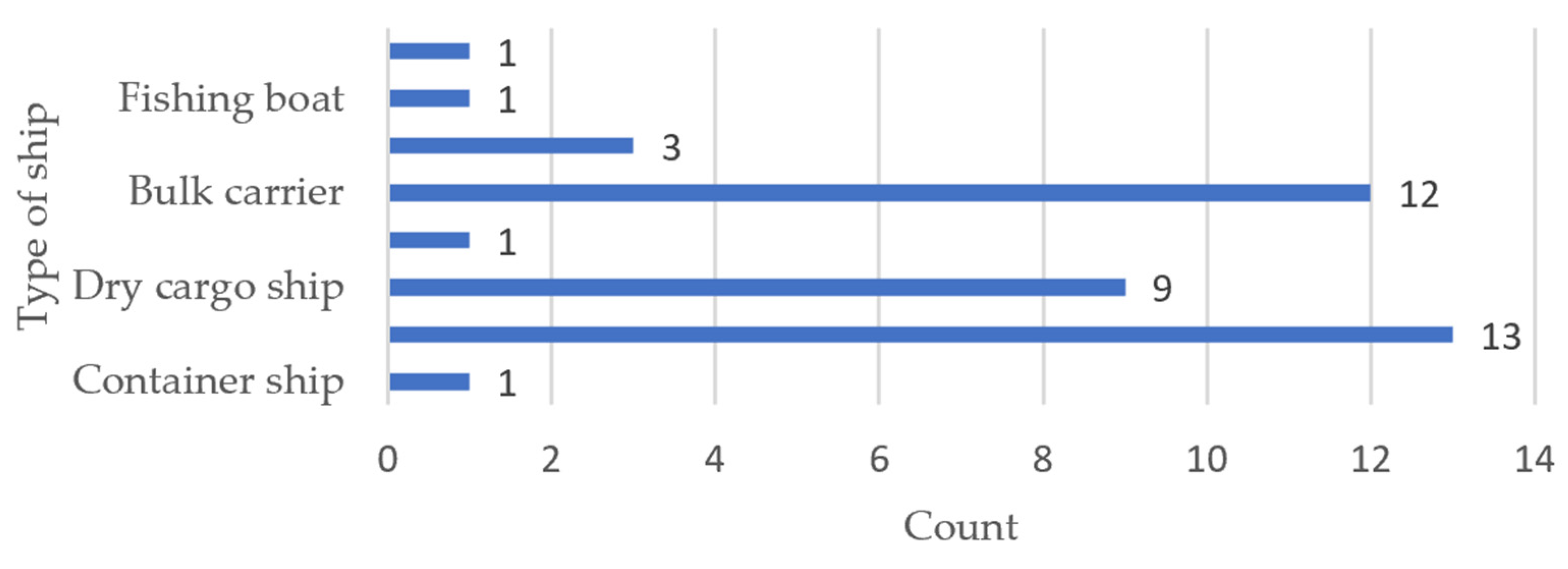
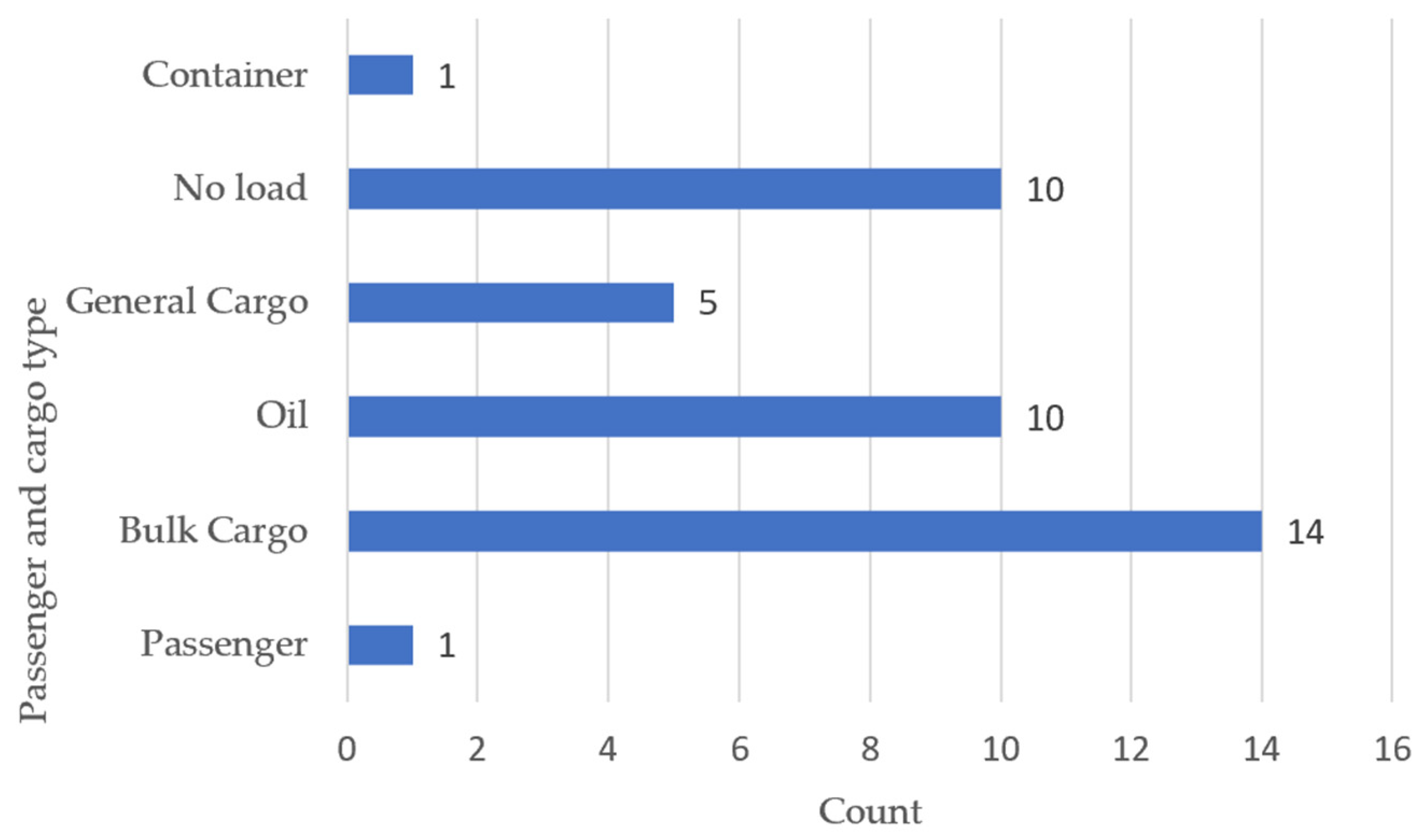
(1) Shipboard fire hazard report collection
A total of 41 shipboard fire reports covering 2013 to 2023 were gathered from Shanghai and China Maritime Safety Administration (
Figure A1). These reports cover various ship types (
Figure A2), passenger and cargo types (
Figure A3).
While the number of detailed fire incident reports involving Ro-Ro EVs between 2013 and 2023 may be limited, this does not diminish the broader significance of this issue. The core motivation for this study arises from the severe and catastrophic consequences from a fire or explosion involving an EV on a Ro-Ro passenger vessel. Such incidents may result in significant loss of life and extensive vessel damage. Even though the occurrence of such incidents has been limited to date, the risk of such events remains substantial, particularly in light of the growing use of lithium-ion batteries in EVs.
The integration of EVs into maritime transport is a direct response to global energy-saving and emission-reduction policies, making it a key trend for the future. As the number of EVs continues to rise, the likelihood of encountering fire-related incidents on Ro-Ro vessels may increase as well. Moreover, beyond Ro-Ro vessels, EVs and lithium-ion batteries are also being transported in containers, with recent incidents of fire and explosion highlighting the increasing risks associated with their transportation in confined spaces.
Our model aims to proactively address these risks by evaluating the fire hazard chain risks on Ro-Ro vessels, integrating advanced methodologies. These approaches allow us to model and predict potential scenarios that may not yet be fully represented by existing incident data, particularly given the rapidly evolving nature of the EV industry and its integration into maritime transport. The absence of sufficient incident data is not a limitation but rather reinforces the importance of building a robust framework that can identify and mitigate risks before they materialize.
Given that transporting EVs on Ro-Ro passenger vessels is an emerging practice with limited accident reports, it is challenging to establish the fire hazard chain mechanism and extract node probabilities. Therefore, shipboard fire accident reports were analyzed to identify the top events for the fault trees and define the stages of the fire hazard chain.
(2) Expert Verification, Refinement, and Probability estimation
In the second step, experts familiar with Ro-Ro EVs operating in the Shanghai Baoshan to Chongming passenger ferry route were consulted to refine the hazard chain stages, risk factors, and fault tree events. These experts also estimated the prior and conditional probabilities of the FBN nodes based on the actual data from the Baoshan to Chongming passenger ferry route. This approach ensures a comprehensive and accurate risk assessment.
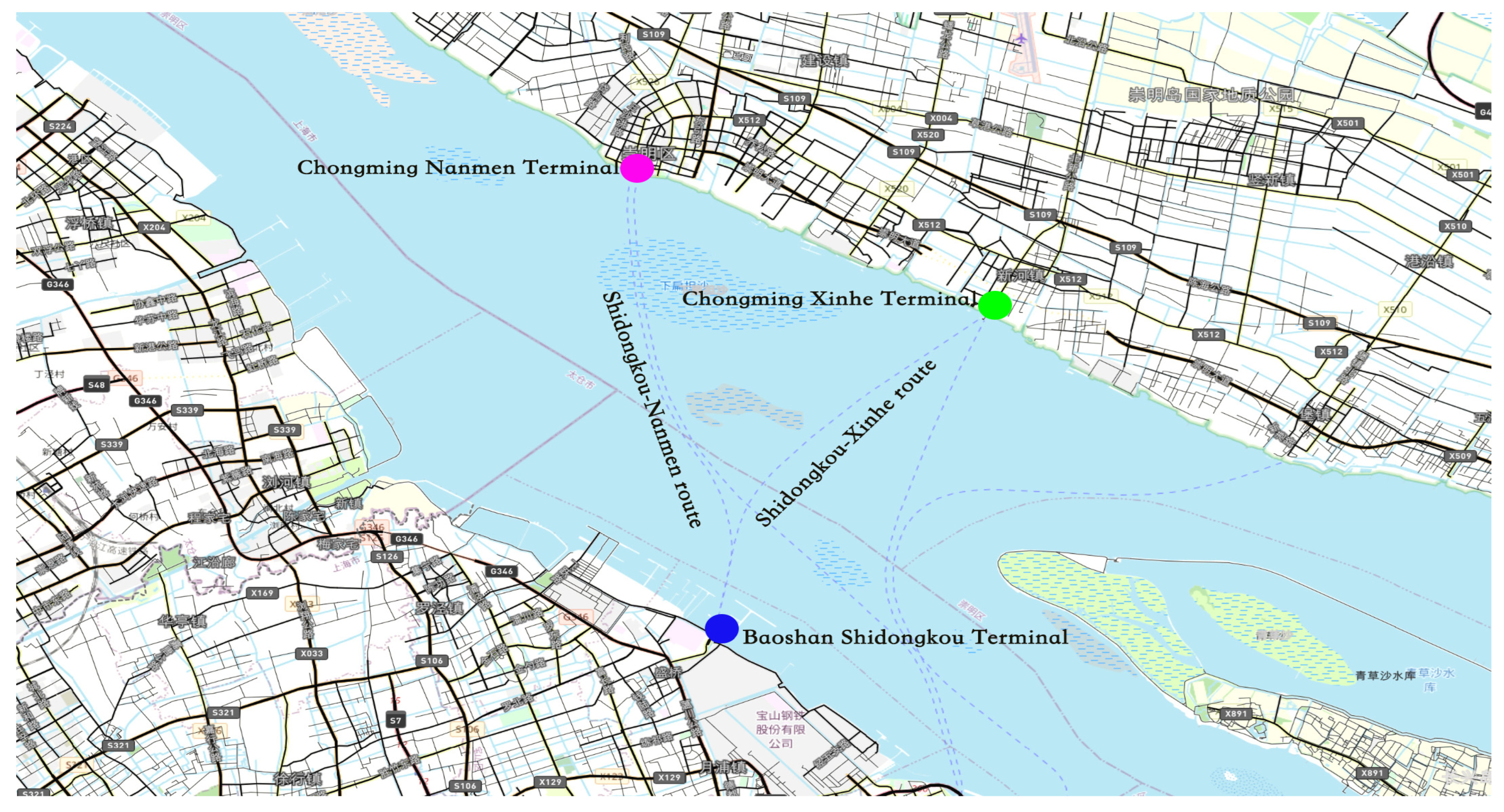
We invited five experts familiar with the Baoshan–Chongming passenger ferry route in Shanghai due to its high passenger traffic and the increasing prevalence of EVs on board. These make it an ideal case study for understanding the unique risks and challenges associated with Ro-Ro EVs. Shanghai leads globally in EV ownership, with 1.288 million new EVs by the end of 2023. In 2023 alone, over 50% of newly registered private vehicles in the city were fully electric. The route includes two lines: from Shanghai Baoshan Shidongkou Terminal to Chongming Nanmen Terminal, and to Chongming Xinhe Terminal (see
Figure 2). The Shidongkou Terminal is the only Ro-Ro terminal serving vehicle and passenger transport to Chongming Island, providing a convenient option for self-driving passengers. Passenger volume surges during holidays and major events, with many travelers bringing their EVs onto the ferry, thus increasing fire risks.
To address the variability in expert estimates of FBN node probabilities, we assign weights to the experts according to the criteria outlined in
Table 2. This weighting system ensures that experts with greater relevance, experience, and contributions to the field have a higher influence on the final assessments. The selected criteria for weighting are designed to be complementary, offering a well-rounded evaluation of expert capabilities without redundancy. This specifically involves the following:
(1) Expertise Field Relevance: Experts with specialized knowledge and extensive experience in the relevant fields are more likely to provide accurate and reliable probability estimates for the FBN nodes. Their deep understanding of the subject matter ensures informed judgments [
24].
(2) Educational Background: Experts with advanced education bring a comprehensive understanding of complex systems, which enhances the quality and precision of their assessments. This criterion accounts for the expert’s theoretical grounding in the relevant discipline [
25].
(3) Service Years: The longer the tenure, the more likely experts are to have encountered a wide range of real-world situations, fostering a depth of practical knowledge. This criterion ensures that experience gained over time is valued in decision making [
25].
(4) Academic and Research Achievements: Experts with significant academic contributions demonstrate their authority in the field. Extensive publications in related areas indicate an active engagement with the latest advancements, enhancing the credibility and depth of their assessments [
26].
(5) Position and Role: High-ranking officials often hold substantial influence and possess broad practical experience in maritime safety and fire risk management. Their leadership roles further contribute to their ability to provide robust insights into the risk assessment process [
25].
By assigning weights based on these factors, we ensure that the expert estimates are both balanced and reliable. This approach gives greater weight to experts with higher expertise, experience, and academic contributions in relevant areas, while also minimizing bias and ensuring the robustness of the final probability estimates. Each of these criteria addresses a distinct aspect of expertise, and together they form a complementary system that captures a full spectrum of knowledge, from theoretical understanding to practical experience and scholarly contribution.
Table 3 presents profiles and the assigned weight scores of the experts, which reflects their overall contribution to the final assessment. The five experts are all from the Shanghai Maritime Safety Administration, each contributing a unique set of qualifications and expertise in maritime safety.
3.2. Fault Tree Analysis (FTA)
FTA is a deductive, top-down approach that identifies and analyzes the root causes of accidents by modeling causal relationships using logical gates (AND/OR). FTA is a widely used methodology for modeling uncertainties. It decomposes the factors leading to a critical event by mapping its progression through different levels: the top event, intermediate events, basic events, and logical gates. Top events represent the critical accidents that we aim to prevent. Intermediate events serve as the link between basic events and the top event, illustrating the escalation of failures. Basic events represent the root causes or conditions at the lowest level that contribute directly to higher-level failures. Logical gates define the relationships between events. An “AND” gate indicates that the top event occurs only if all connected events take place, whereas an “OR” gate signifies that the top event can occur if any connected event occurs [
27,
28].
3.2.1. Top Events in Fire Hazard Chain of Ro-Ro EVs
The fire evolution stages on Ro-Ro EVs are identified as the top events in the fault trees. These stages represent the ultimate consequences that we aim to understand and mitigate.
Table 4 outlines the fire evolution stages specific to Ro-Ro EVs, based on the International Safety Management (ISM) Code and fire dynamics particular to these vessels. The unique features of Ro-Ro EVs—such as thermal runaway risks, high battery energy densities, flammable materials, and confined storage conditions—create a complex and dynamic fire risk evolution. The interrelated nature of these stages demands a specialized approach to fire detection, prevention, and mitigation for Ro-Ro EVs.
3.2.2. Intermediate and Bottom Events of Stage 1
The fault tree analysis traces the causes of top events to identify underlying factors, progressing through intermediate and basic events.
The intermediate and bottom events contribute to the “Fire hazard and initial ignition” phase on Ro-Ro EVs, as detailed in
Table 5 and
Table 6.
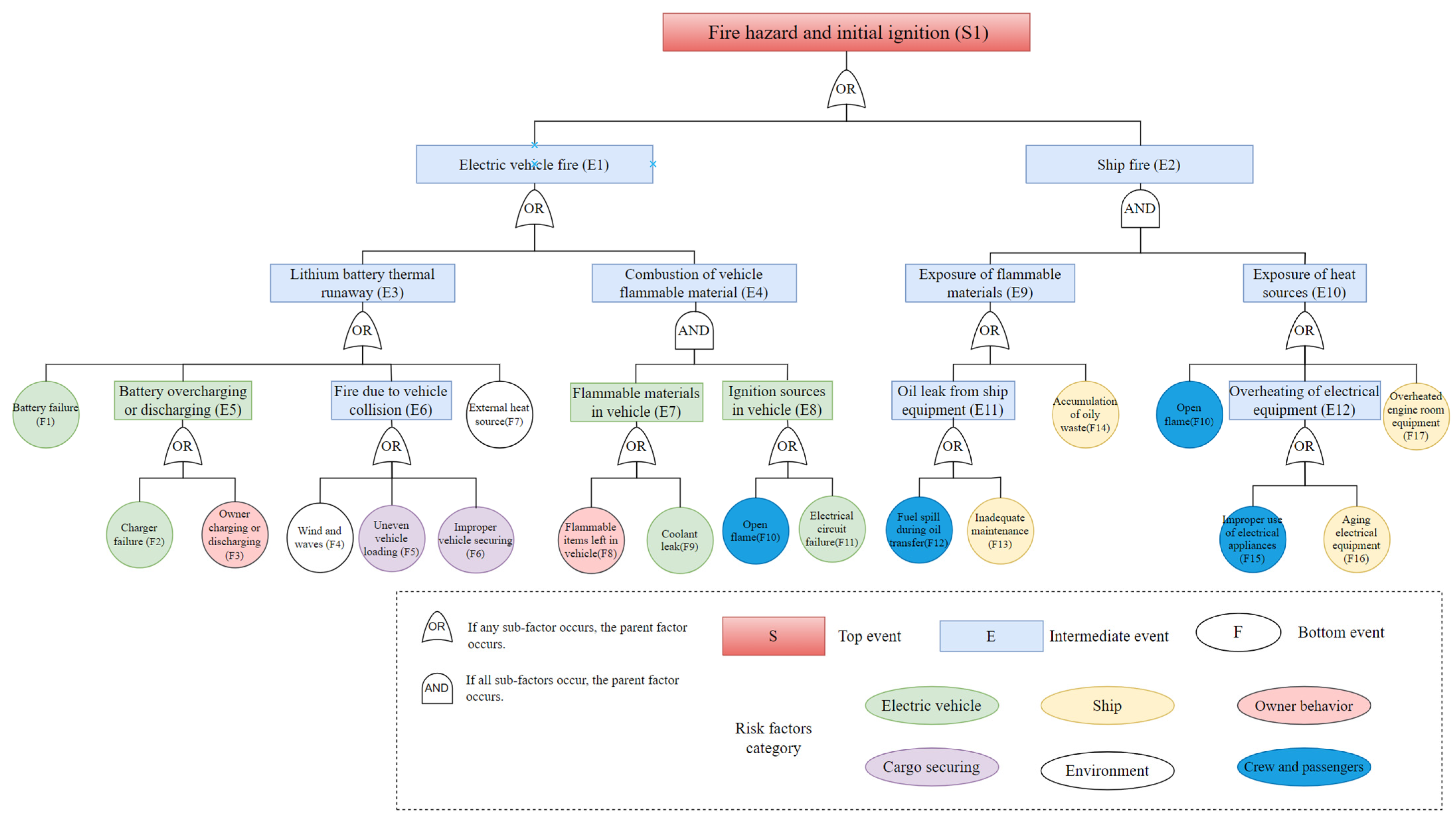
The fire hazard and initial ignition phase on Ro-Ro EVs presents unique and elevated risks compared to traditional cargo ships, owing to the specific characteristics of EVs and their integration into confined, high-density Ro-Ro shipboard spaces.
(1) Lithium-ion Battery Risks: The presence of lithium-ion batteries in EVs significantly increases fire risks, such as thermal runaway (E3), overcharging or deep discharging (E5), and battery damage during transit (E6). These risks are heightened in Ro-Ro vessels, where vehicles are packed closely together, and ventilation is often limited. The confined space can facilitate rapid fire escalation, making containment more difficult.
(2) Flammable Materials and Ignition Sources: In addition to battery-related risks, the combustion of flammable materials inside EVs (E4) and the presence of ignition sources like electrical sparks (E8) pose significant threats in these cramped environments. Further complicating the situation is the potential presence of flammable liquids or leaking coolants (E7), which can ignite easily when near other vehicles, increasing the likelihood of fire spreading across multiple EVs.
(3) Ship-related Hazards: Shipboard fire risks, such as improper storage of flammable materials (E9) or uncontrolled heat sources (E10), can exacerbate fire hazards when interacting with the high-energy components of EVs. Oil leaks from ship equipment (E11) and overheating electrical equipment (E12) also contribute to the overall risk, highlighting the complex and hazardous environment on Ro-Ro vessels.
The combination of these factors creates a more intricate and dangerous fire risk scenario on Ro-Ro ships compared to conventional cargo vessels. This makes fire management more challenging and requires specific mitigation strategies.
The fire ignition risks during the transport of EVs on Ro-Ro vessels are significantly higher and more complex compared to traditional vessels. This is due to several unique factors related to EV batteries, charging systems, vehicle owner behaviors, and environmental conditions.
(1) High-Voltage Batteries and Charging Infrastructure: The primary risk factor is the presence of high-voltage battery systems and their associated charging infrastructure. These are not typically found with conventional internal combustion engine (ICE) vehicles. Malfunctions in EV batteries, such as internal short circuits or aging, can result in catastrophic failures, especially in the confined, poorly ventilated spaces of Ro-Ro vessels. This increases the likelihood of fire ignition.
(2) Improper Charging and Vehicle Movement: In addition to battery malfunctions, improper charging or discharging by vehicle owners—along with potential charger failures—further exacerbates the fire risk. Ro-Ro vessels may lack the appropriate charging systems for EVs, adding to the hazard. Furthermore, during transit, vehicle movement can cause improper securing or uneven loading, potentially leading to damage that triggers electrical failures or short circuits.
(3) External Environmental Factors: Exposure to external heat sources, such as intense sunlight or high ambient temperatures, further increases the risk of battery overheating, which can escalate the potential for fire. Combined with the challenges posed by the Ro-Ro vessel’s operational environment—such as rolling motions, confined spaces, and the presence of mixed cargo—these factors make fire ignition risks on vessels transporting EVs far more challenging to manage than those posed by vessels carrying conventional cargo.
3.2.3. Intermediate and Bottom Events of Stage 2
Table 7 and
Table 8 outline the intermediate and bottom events associated with the “Fire Propagation and Intensification” phase (S2) on Ro-Ro EVs.
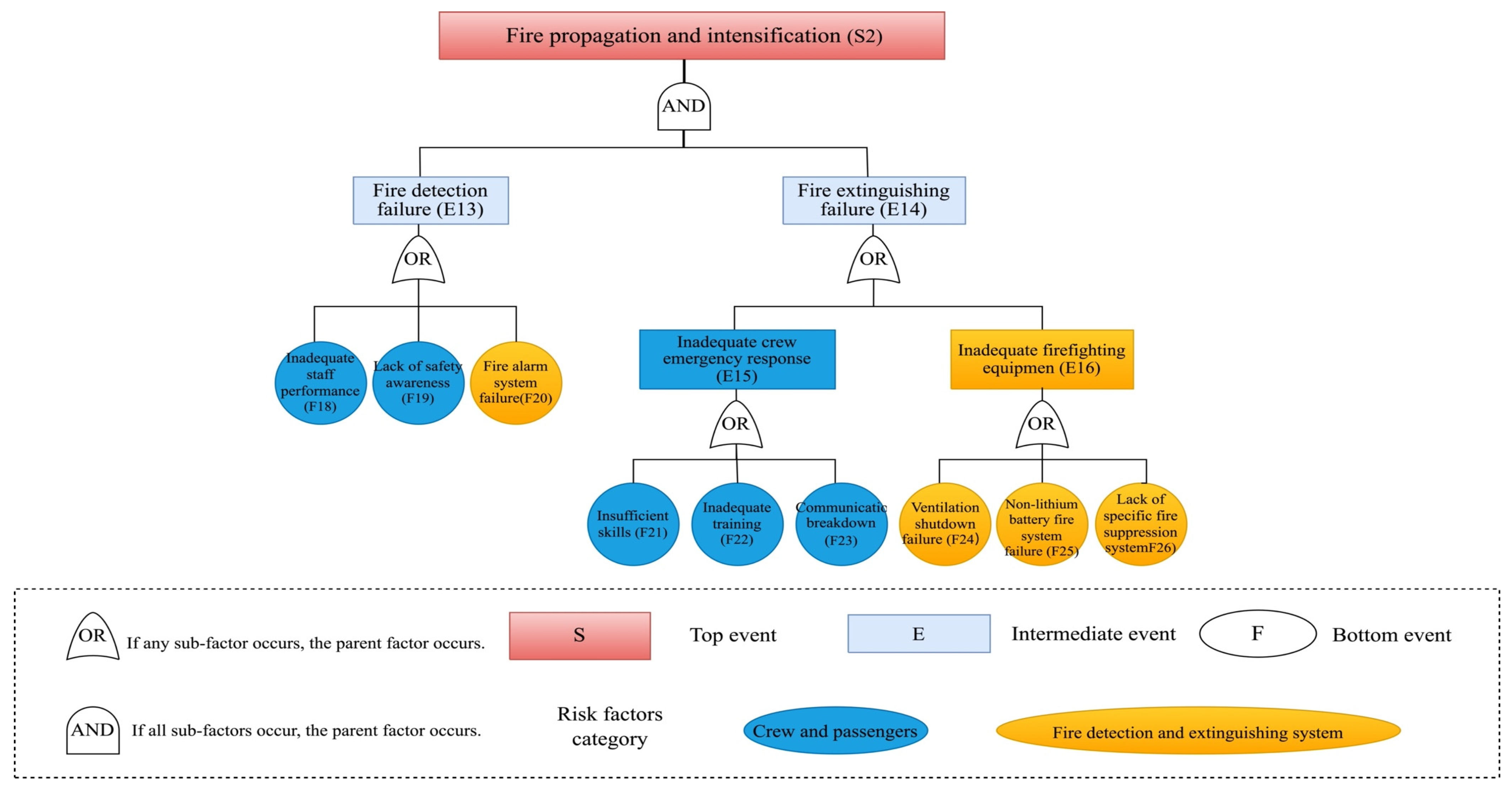
The “Fire Propagation and Intensification” phase (S2) on Ro-Ro EVs introduces specific challenges due to the unique risks associated with EVs and their operating environment.
Intermediate events, such as fire detection and extinguishing failures (E13, E14), are critical in Ro-Ro vessels due to the confined spaces and high vehicle density. Delays in detecting or suppressing a fire can result in rapid escalation, making early intervention crucial. Additionally, inadequate crew response (E15) and insufficient firefighting equipment (E16) complicate fire control. Ro-Ro vessels may lack systems tailored to the needs of EV fires, such as those for lithium-ion battery incidents.
For bottom events, factors such as inadequate staff performance (F18), lack of safety awareness (F19), and insufficient training (F22) are particularly dangerous. Crew members may be unprepared for the specific challenges posed by EV fires. Communication breakdowns (F23) and failure to control ventilation (F24) can accelerate fire spread within the tightly packed spaces of Ro-Ro decks. Importantly, the absence of specialized EV fire suppression systems (F26) highlights a significant gap in safety protocols, complicating fire management compared to conventional cargo vessels.
3.2.4. Bottom Events of Stage 3
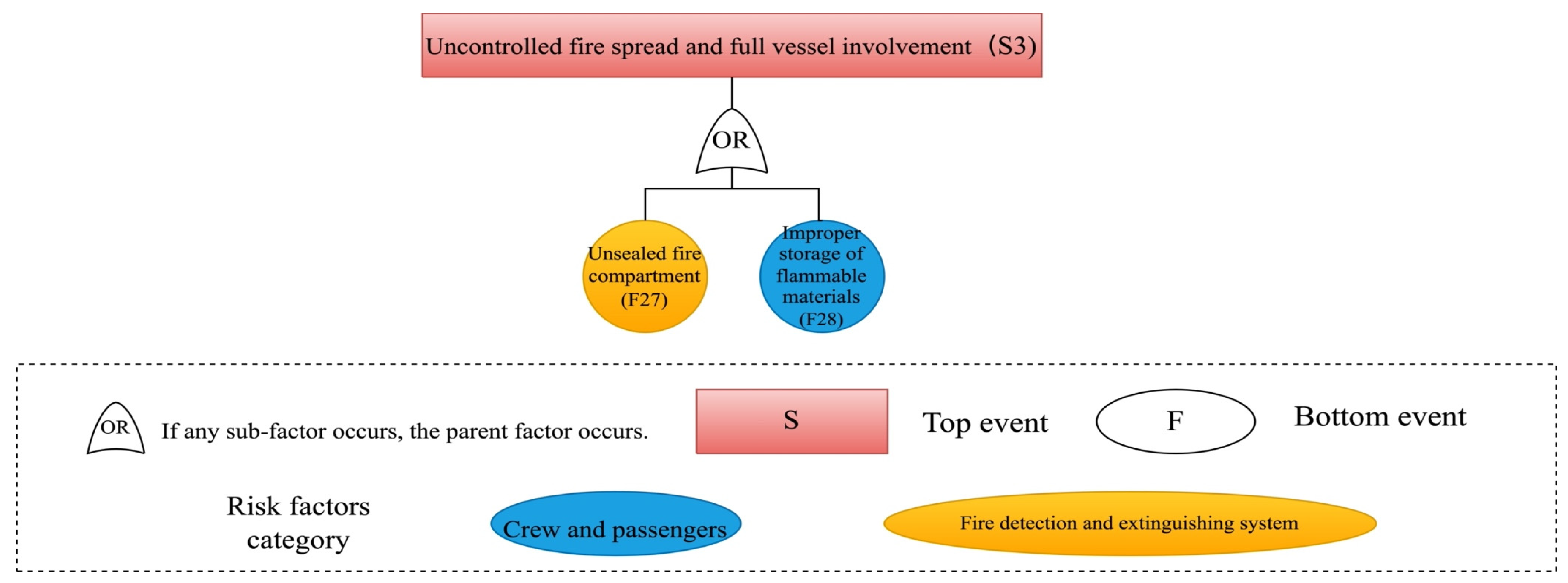
The “Uncontrolled Fire Spread and Full Vessel Involvement” phase (S3) in the fault tree consists solely of bottom events, rather than intermediate events. At this stage, the fire has already progressed beyond the point where intermediate factors influence its development. The fire has spread uncontrollably, with the primary risks stemming from failures in fire containment and the management of flammable materials. Critical factors, such as failure to seal fire compartments or improper storage of flammable materials, directly contribute to the rapid spread of the fire throughout the vessel. Since the fire is no longer controllable or manageable at this point, the focus shifts to the underlying failure points (bottom events) that facilitate the escalation, rather than factors that may have influenced earlier stages of fire development. Therefore, the fault tree in this phase highlights these final failure points, which allow the fire to spread uncontrollably.
Table 9 lists the bottom events for the “Uncontrolled Fire Spread and Full Vessel Involvement” phase (S3).
The “Uncontrolled Fire Spread and Full Vessel Involvement” phase (S3) on Ro-Ro EVs presents unique risks compared to conventional vessels and cargo. The risk of unsealed fire compartments (F27) is particularly critical on Ro-Ro ships due to their confined and interconnected spaces. If these spaces are not promptly sealed, fire and smoke can spread rapidly across the vessel. The high vehicle density and specific fire hazards associated with electric vehicles—especially those involving lithium-ion batteries—make it essential to quickly contain the fire within affected compartments to prevent further escalation.
Additionally, improper storage of flammable materials (F28) in passageways or unprotected areas presents a heightened concern in Ro-Ro vessels. The presence of EVs introduces additional ignition sources, such as lithium-ion batteries, which significantly increase the fire risk. This differs from conventional cargo vessels, where fire spread may be more manageable due to lower cargo density and fewer specific fire hazards associated with the cargo.
3.3. Fuzzy Bayesian Network (FBN)
BN, a probabilistic graphical model, excels at managing uncertainty and interdependencies between variables. It updates outcome probabilities based on new evidence. An FBN is a probabilistic model that combines Bayesian networks with fuzzy logic to manage uncertainty in risk assessments. In an FBN, nodes represent risk factors, and directed edges indicate causal relationships between these factors. Probabilities are expressed as fuzzy sets, which helps manage the inherent imprecision in assessing complex risks [
25]. This is especially valuable in scenarios like fire incidents on Ro-Ro EVs, where exact probability data are often unavailable.
3.3.1. Converting FTA into FBN Structure
The integration of FTA with FBN improves the comprehensiveness of risk evaluation throughout the fire hazard chain on Ro-Ro EVs. FTA identifies the root causes of possible failures, while the FBN incorporates expert judgment to estimate probabilities, compensating for the lack of historical data. This combined methodology allows for an in-depth assessment of risk, covering all stages from fire ignition to the full involvement of the vessel.
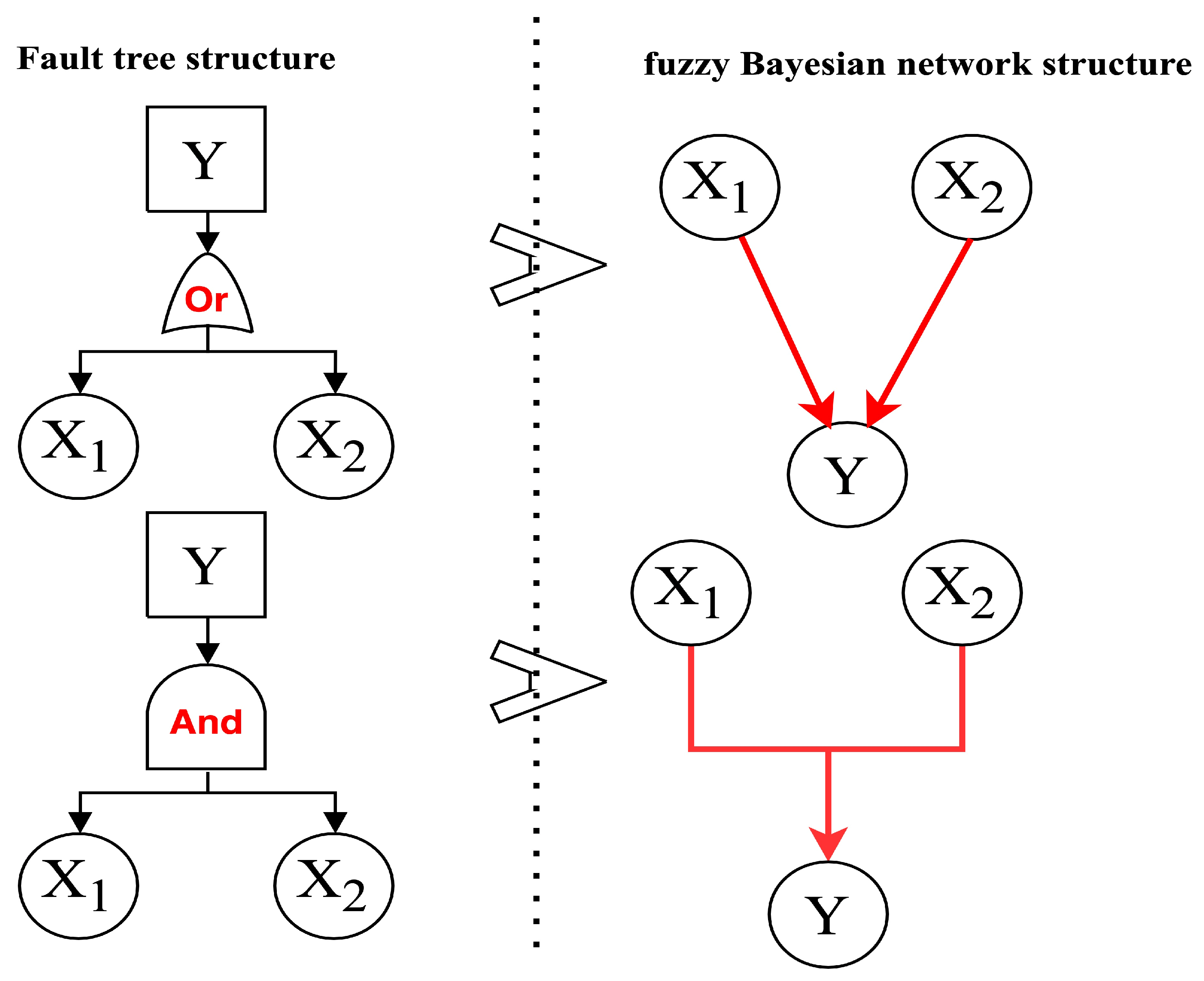
Figure 3 illustrates how the FTA model is converted into an FBN. In this conversion, each event identified in the FTA is represented as a node in the FBN, reflecting the system’s key variables. Similar events in the FTA are consolidated into single nodes in the FBN. The logical relationships from the FTA are mapped as directed edges, with probabilities assigned through a combination of logic gate mapping (
Figure 4) and fuzzy theory.
3.3.2. Prior Probability Estimation
The prior probabilities of parent nodes and the conditional probabilities of child nodes in a BN are estimated using fuzzy theory by experts based on the Shanghai Baoshan–Chongming Ro-Ro ferry route transporting EVs. In a BN, the prior probability of a parent node represents the likelihood of an independent event occurring, unaffected by other nodes. The conditional probability of a child node reflects the likelihood of the event occurring, given the state of its parent nodes. These relationships are represented in conditional probability tables (CPTs), which quantify how different parent node states influence the probabilities of child nodes.
To estimate the prior probabilities of parent nodes in an FBN for fire hazards involving Ro-Ro EVs, the following steps are implemented:
(1) Design of fuzzy scoring levels based on the causal relationships in the fault trees.
The fuzzy levels represent the likelihood of parent node events. Multiple experts (as detailed in
Section 3.1) provide evaluations of the likelihood of parent node events. Due to the inherent uncertainty in expert judgments, these evaluations are expressed using fuzzy numbers.
The fuzzy assessments are represented as triangular fuzzy numbers (TFNs), denoted as (
a, b, c).
a is the minimum likelihood value,
b is the most likely value, and
c is the maximum likelihood value. TFNs were selected for their balance between simplicity and flexibility, as well as their wide acceptance in uncertainty modeling [
42,
43]. With only three parameters, TFNs are computationally efficient and easier to interpret compared to other fuzzy number representations. Furthermore, TFNs align seamlessly with the centroid method for defuzzification, producing a single crisp value that effectively captures uncertainty.
To enhance the precision of scoring parent nodes and CPTs, we defined nine likelihood levels, each associated with specific TFNs (
Table 10). This approach provides a granular yet manageable framework for expert scoring.
The use of a 9-level TFN system is well suited for modeling fire risks on Ro-Ro EVs. It strikes a balance between granularity and practicality, accommodating the complexity of a multi-stage fault tree analysis and the diverse causal relationships involved. In the FTA for Ro-Ro EV fire incidents, each BN node can have up to 16 conditional probability scenarios. Fewer likelihood levels would hinder experts’ ability to accurately distinguish subtle differences in probabilities, potentially leading to overly generalized estimates. Conversely, using more than 9 levels could introduce excessive complexity, making it difficult for experts to provide consistent and reliable judgments, especially considering the inherent uncertainty in the system. By adopting a 9-level scale, this approach ensures nuanced probability estimates without overwhelming the scoring process. This level of detail supports accurate, practical assessments of fire risks while maintaining clarity and usability for the experts involved in modeling.
(2) Calculate Weighted Averages to Aggregate Multiple Expert Opinions
To aggregate the fuzzy values provided by multiple experts, we compute the weighted average of the TFNs for each parent node, considering the expertise of each expert. Let
m represent the number of experts, and
wi represent the weight assigned to the
i-th expert. For each expert, the TFN consists of three values,
ai,
bi, and
ci, which represent the minimum, most likely, and maximum values provided by the
i-th expert, respectively. The weighted average of the TFNs is calculated using the following formulas [
23]:
These formulas ensure that the aggregated fuzzy values reflect the expert opinions, weighted by their respective expertise.
(3) Defuzzification to estimate prior probabilities of parent nodes
To convert the aggregated fuzzy numbers into crisp values, we apply the centroid method [
23]. The center of gravity of a fuzzy number is calculated as follows:
Here, b is weighted twice as much as a and c, which ensures a balanced representation of the fuzzy number’s range. This method effectively captures both the central tendency and the uncertainty inherent in the fuzzy number. By using the centroid method, we avoid biases that might arise from relying solely on the maximum membership value or the midpoint. As a result, the centroid method provides a more robust and accurate crisp value, making it particularly useful in risk assessments where managing uncertainty is crucial.
(4) Update Bayesian Network
The defuzzified prior probabilities are then incorporated into the BN, updating the likelihood estimates of the parent nodes accordingly. This ensures that the network reflects the most accurate and up-to-date probabilistic information for the subsequent analysis.
3.3.3. Conditional Probability Estimation
Estimating the conditional probabilities of child nodes requires a different approach compared to estimating the prior probabilities of parent nodes. This process captures the casual relationships between nodes and relies on expert judgment to quantify these dependencies. Let
E represent the child node for which the conditional probability is being calculated. The parent nodes, denoted as
A,
B, …,
N, each influence
E. The specific values of the parent nodes are represented as (
Ai,
Bj, …,
Nk) [
10].
(1) Define Conditional Relationships using FTA and Expert Judgements
For each child node in the fault tree-based BN structure, establish logical relationships with its parent nodes (e.g., OR, AND). All possible combinations of parent node values (Ai, Bj, …, Nk) are identified. Experts are then consulted to evaluate the influence of these relationships on the probabilities of the child node. Fuzzy numbers are used to capture uncertainties in these assessments. The expert judgments are expressed as TFNs, represented by the lower, middle, and upper bounds of the conditional probabilities (am, bm, cm).
(2) Aggregate Multiple Expert Opinions using Weighted Averages
To aggregate expert opinions, the weighted average of the TFNs for each CPT is calculated. Experts’ weights are incorporated in the aggregation process. The weighted averages for each value of the TFNs are computed as follows:
where
aij…k,
bij…k, and
cij…k are the lower, middle, and upper values of the TFNs, respectively, for each combination of parent node values.
(3) Defuzzification to Estimate Conditional Probabilities
The centroid method is employed to defuzzify the aggregated TFNs and obtain crisp conditional probabilities. This method identifies the center of gravity of the fuzzy numbers, providing precise probabilities for each child node given its parent nodes. Each node in the BN is assigned two possible states, state 1 (true) and state 2 (false), based on accident reports and expert evaluations. The conditional probabilities of child node
E being in each state are calculated as follows:
(4) Update the Bayesian Network
The defuzzified conditional probabilities are incorporated into the BN to accurately model the dependencies between parent and child nodes. This step ensures that the network reflects expert assessments and allows for updates as new data or insights are gathered.
3.3.4. Handling Consensus and Divergence in Expert Ratings
To assess the consistency and robustness of expert fuzzy ratings, statistical metrics are applied (
Table 11), including Cohen’s kappa, mean, median, standard error, standard deviation, range, confidence interval, skewness, and kurtosis [
11,
19]. These statistical metrics will be used in
Section 4.1 to assess the consistency and robustness of experts’ fuzzy ratings for probabilities.
(1) Cohen’s kappa helps assess whether the experts agree on the same set of ratings, providing a robust measure of inter-expert consistency. It directly helps measure the reliability of the assessment.
(2) The mean and median show the general trend in expert ratings, with the median being particularly useful in the case of skewed distributions. A mean close to the median indicates that expert opinions are generally aligned.
(3) Standard error and standard deviation provide insights into how consistent the ratings are across experts. Standard deviation gives a direct measure of variation, whereas standard error provides insight into the precision of the estimate.
(4) The sample variance and coefficient of variation indicate the dispersion of expert scores, which indirectly reflects consistency and robustness.
(5) The confidence interval provides an interval within which the true values are likely to fall, helping gauge how robust and reliable the expert assessments are.
(6) Skewness and kurtosis provide insights into the shape of the distribution of ratings. Skewness tells us if the ratings are biased in one direction, while kurtosis informs us about the concentration of ratings around the mean.
These metrics, collectively, ensure that the expert assessments are not only consistent but also represent a robust and reliable set of opinions, while identifying and addressing discrepancies or biases in expert judgment.
Three core axioms and sensitivity analyses are employed to strengthen the robustness and reliability of the expert-derived FBN model while addressing potential inconsistencies [
25]. These three axioms will be used in
Section 4.3 to validate the FBN model.
Axiom 1 ensures that significant changes in the prior probabilities of parent nodes lead to proportionate adjustments in the posterior probabilities of child nodes, maintaining logical consistency in causal links.
Axiom 2 verifies that changes in parent node probabilities consistently influence child nodes, providing a stable framework for evaluating interdependencies.
Axiom 3 confirms that the combined effect of multiple parent nodes outweighs the influence of any single node, validating the logical structure of multi-factor causation.
A sensitivity analysis further identifies critical factors and quantifies the impact of parent nodes on child nodes, enabling the detection and resolution of inconsistencies in expert ratings. The results of the sensitivity analysis will be discussed in
Section 4.4.
4. Results
4.1. Data Description and Consistency
The estimates of the parent nodes and conditional probabilities of the FBN by the five experts based on Ro-Ro EVs operating in the Shanghai Baoshan to Chongming passenger ferry route are shown in
Table 12 and
Table 13.
To assess the consistency and robustness of experts’ fuzzy ratings for prior probabilities and conditional probabilities, several statistical measures were calculated: Cohen’s kappa coefficient (
Table 14), mean, median (
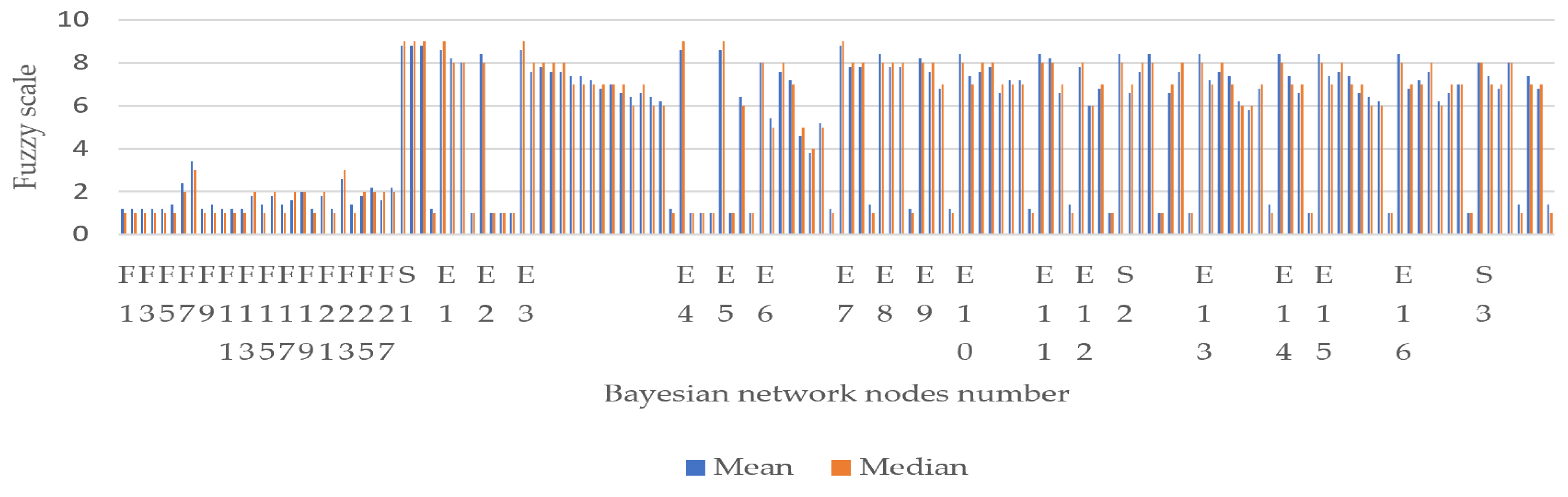
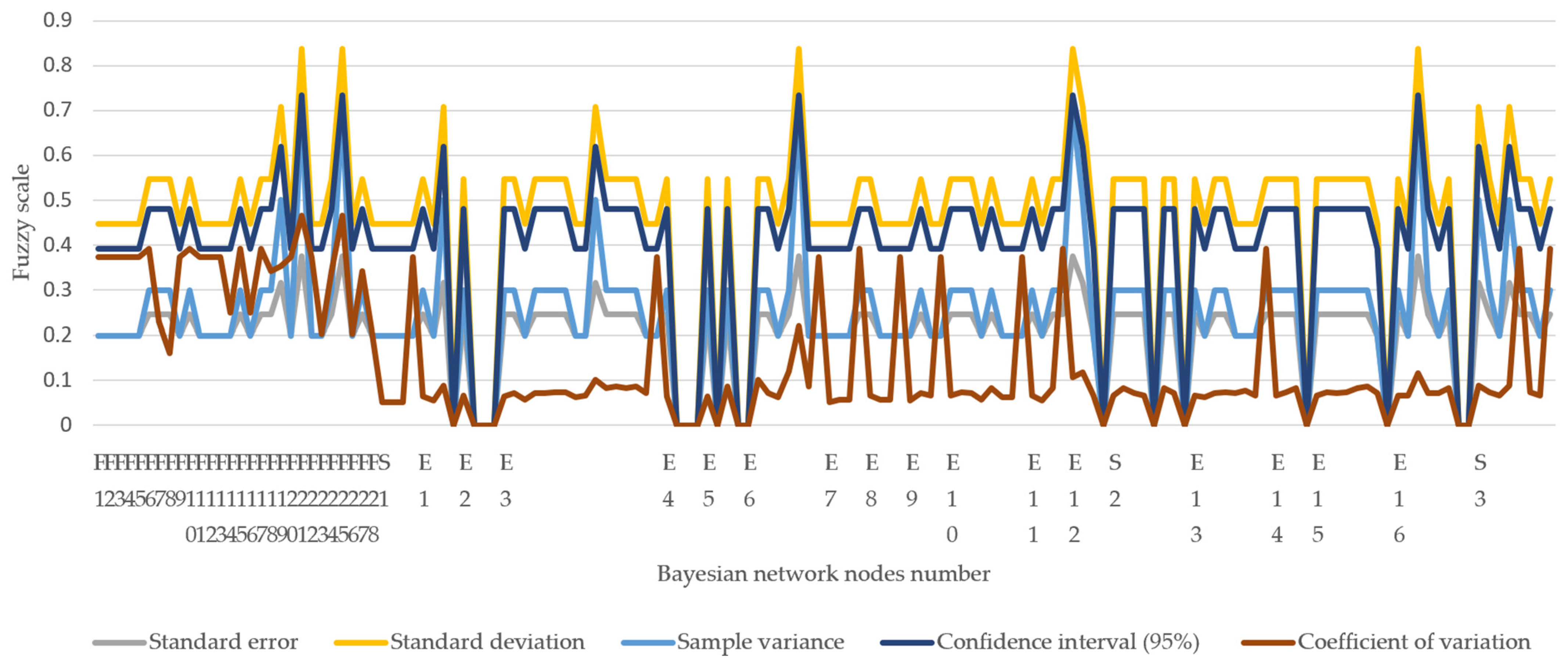
Figure 5), standard error, standard deviation, confidence level (95%), coefficient of variation (
Figure 6), skewness, and kurtosis (
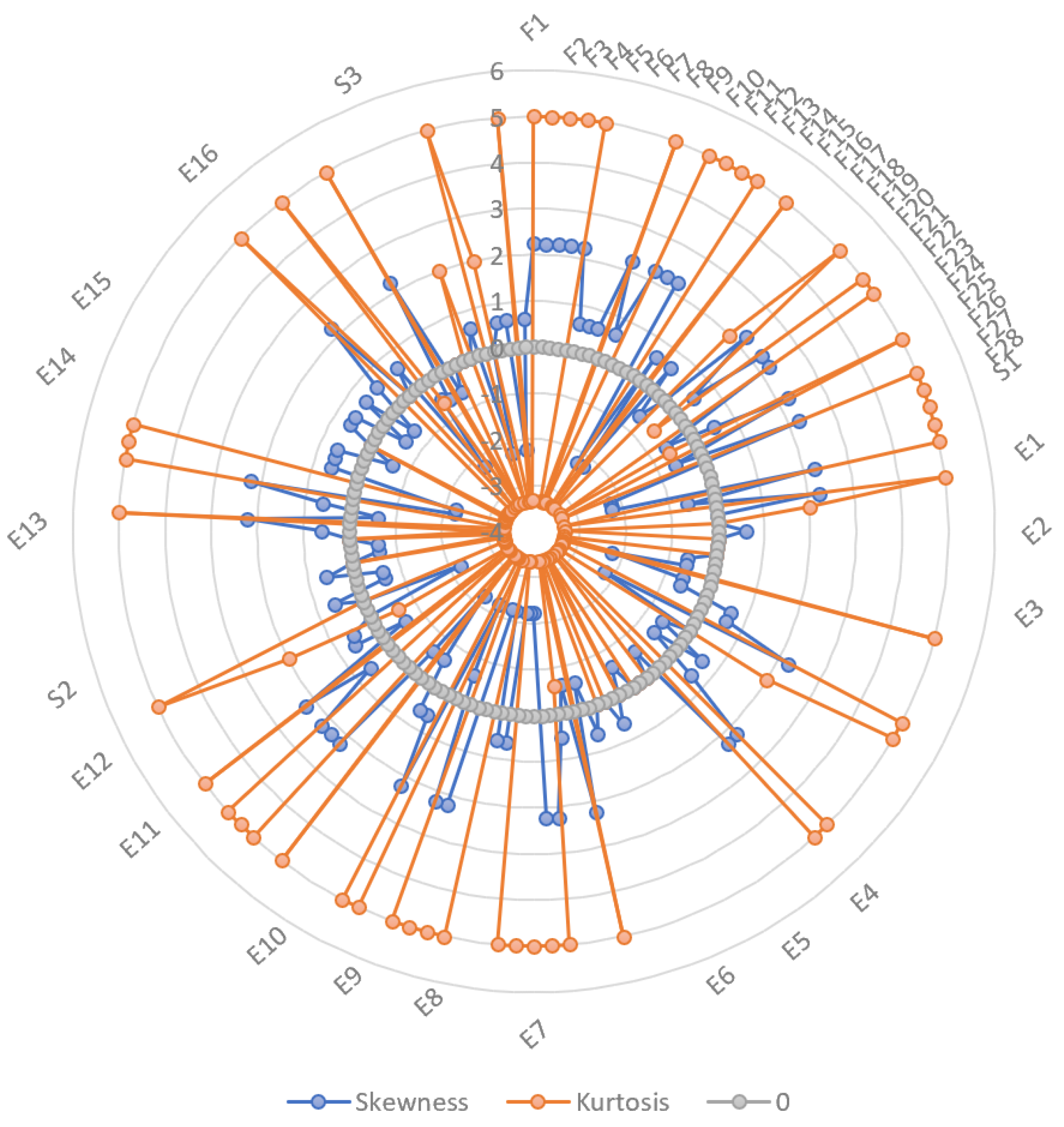
Figure 7).
In
Table 14, Cohen’s kappa values for expert ratings are all above 0.21, with most falling between 0.41 and 0.60. As discussed in
Section 3.3.4, these values indicate good consistency among the experts and minimize subjective bias.
The difference between the mean and median in
Figure 5 is very small. As discussed in
Section 3.3.4, this indicates that the scores are relatively concentrated and the consistency of expert opinions is high. Furthermore, it suggests that the scoring criteria designed in this study are clear.
Figure 6 shows that the trend of standard error and standard deviation is close, and the amplitude is small. As discussed in
Section 3.3.4, this indicates that the accuracy of the sample mean is high. The standard deviation and sample variance are relatively stable with the change in nodes and fluctuate evenly. This indicates that the distribution consistency of the data is high. The confidence level mostly fluctuates between 0.391 and 0.480, demonstrating strong reliability. The coefficient of variation mostly fluctuates below 0.1, indicating that the scoring results are highly robust.
Figure 7 shows the distribution of skewness and kurtosis of different nodes (F1 to S3). As discussed in
Section 3.3.4, skewness values near zero indicate symmetry, while deviations highlight asymmetry. Positive kurtosis suggests a concentrated distribution, whereas negative kurtosis points to flatter data. The kurtosis of most node scores in this study fluctuates around 0, and the skewness distribution is relatively concentrated. Overall, the statistical analysis confirms that the expert rating has minimal variability and high consistency, and is reliable and robust.
4.2. Model Results
4.2.1. Fault Tree Models
Figure 8,
Figure 9 and
Figure 10 illustrate the fault tree models for the three stages of the fire hazard chain on Ro-Ro EVs. These models provide a systematic representation of the sequential failures that contribute to fire hazards, offering a clear and structured framework for analyzing fire risks at each stage.
4.2.2. FBN Structure
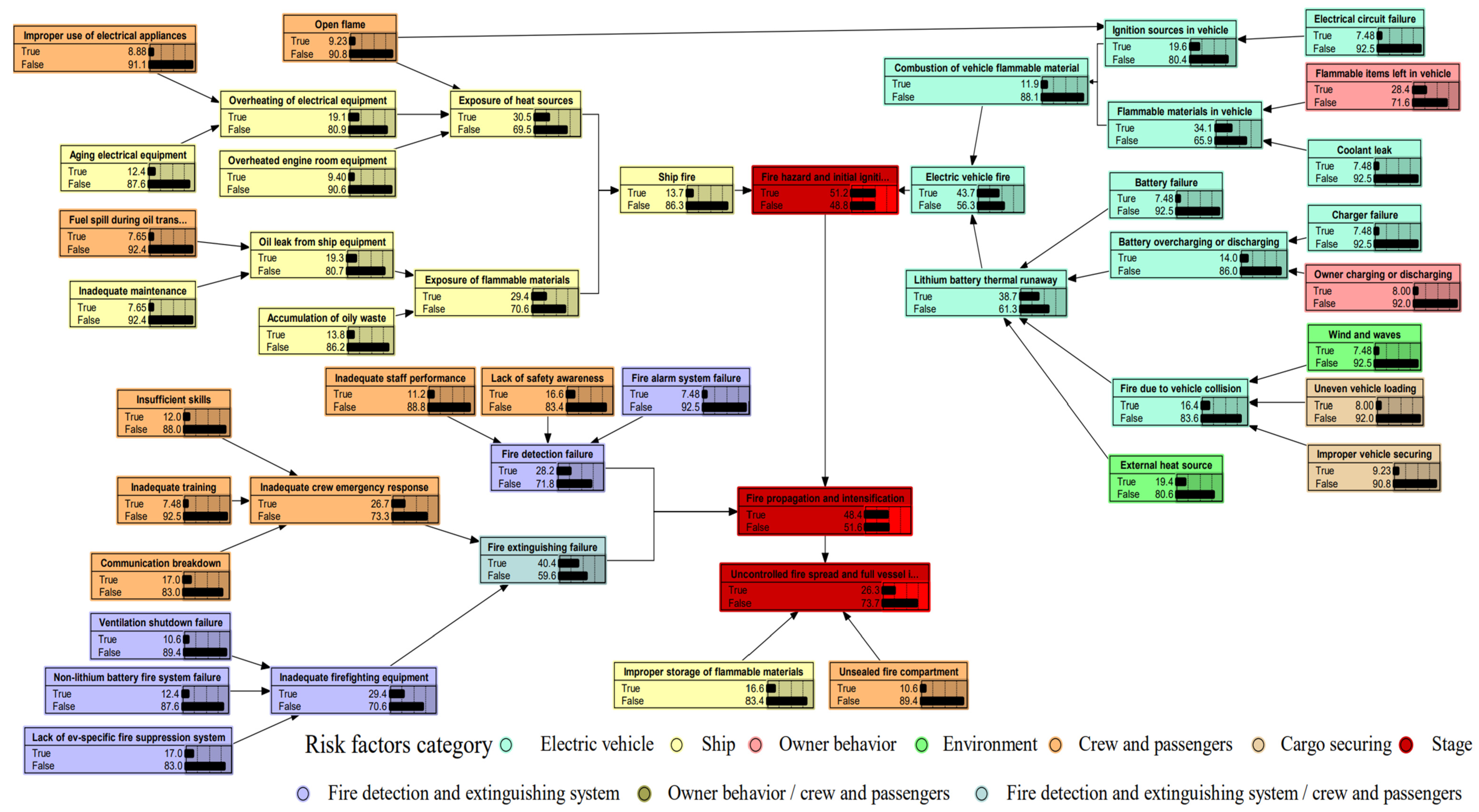
The FBN model was developed using NETICA software (version 5.18.0.0), and its structure is illustrated in
Figure 11.
4.3. Validation of FBN Model
The validation process is critical to ensure the reliability and accuracy of the FBN model. A robust FBN model must adhere to three key axioms [
25,
44].
Axiom 1. Significant changes in the prior probabilities of parent nodes must result in meaningful changes in the posterior probabilities of their child nodes.
This relationship is quantified in
Table 15. It demonstrates how variations in the prior probabilities of the parent nodes (e.g., “Wind and waves,” “Uneven vehicle loading,” and “Improper vehicle securing”) affect the posterior probability of the child node “Cargo shift (E6).” For instance, when the parent node “Improper vehicle securing (F6)” is true with a probability of 100%, the posterior probability of “E6” in the true state increases to 55.9%, compared to only 12.4% when the parent node is in a false state. These results confirm that the model responds appropriately to changes in parent node probabilities.
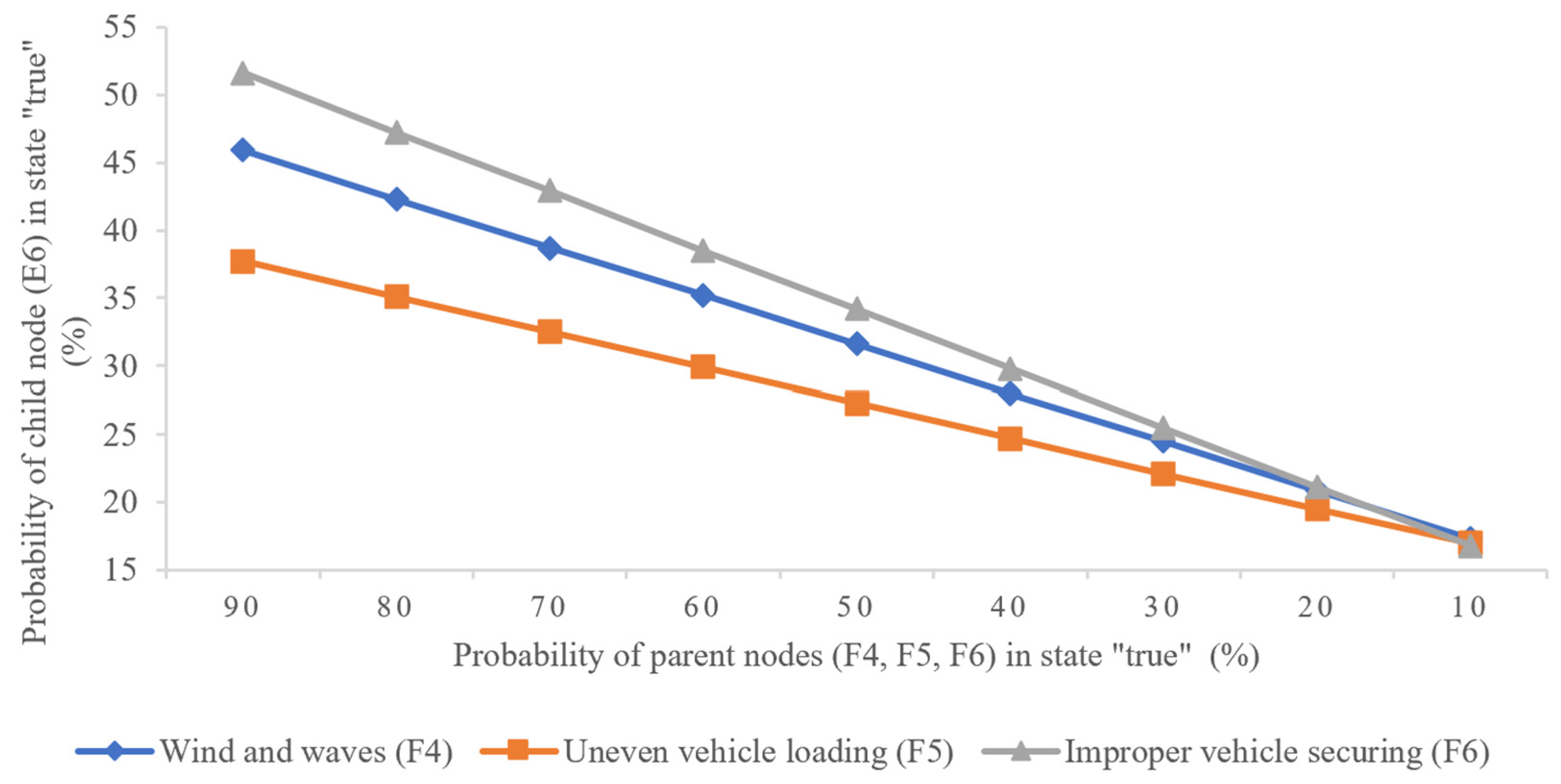
Axiom 2. Changes in the prior probabilities of parent nodes should consistently influence the probabilities of their child nodes.
Figure 12 shows how variations in the prior probabilities of parent nodes impact the probability of the child node “E6”. The trends confirm that the model maintains consistency in propagating changes across nodes.
Axiom 3. For a child node influenced by multiple parent nodes, the combined effect of all parent nodes should exceed the effect of any single parent node.
The results presented in
Table 16 confirm that the model adheres to this requirement.
The results demonstrate that the child node’s probability in state 1 (E10) increases significantly when all parent nodes are in state 1, exceeding the influence of any individual parent node alone. This confirms the FBN model’s compliance with Axiom 3.
In summary, the FBN model successfully passed all three axiom tests, validating its robustness and reliability for fire hazard chain risk assessment.
4.4. Sensitivity Analysis
Table 17,
Table 18 and
Table 19 present the sensitivity analysis of the key risk factors influencing the fire hazard probabilities across three stages: S1 (fire hazard and initial ignition), S2 (fire propagation and intensification), and S3 (uncontrolled fire spread and full vessel involvement) (Fusion, 2017). To evaluate the impact of extreme conditions, the probabilities for each stage are set to 0% (no fire hazard) or 100% (certain fire hazard). The findings will be discussed in
Section 5.3.
5. Discussion
5.1. Fire Hazard Chain Mechanisms of Ro-Ro EVs
To identify the key causal chains in the fire hazard chain process for Ro-Ro EVs, reverse reasoning is employed. This method involves setting the target nodes (S1, S2, and S3) to their “true” state (i.e., 1), then calculating the posterior probabilities of the child nodes.
In the first stage (S1: fire hazard and initial ignition),
Figure 13 illustrates the primary causal chain, External heat source (25.6%) → Lithium battery thermal runaway (63.3%) → Electric vehicle fire (78.9%) → Fire hazard and initial ignition (100%), denoted as F7-E3-E1-S1. A secondary chain is also identified, Improper vehicle securing (10.7%) → Fire due to vehicle collision (22.1%) → Lithium battery thermal runaway (63.3%) → Electric vehicle fire (78.9%) → Fire hazard and initial ignition (100%), represented as F6-E6-E3-E1-S1.
In the second stage (S2: fire propagation and intensification), the key causal chain is Lack of EV-specific fire suppression systems (21.9%) → Inadequate firefighting equipment (42.1%) → Fire extinguishing failure (69.7%) → Fire propagation and intensification (100%), denoted as F26-E16-E14-S2. This sequence highlights the inadequacy of current fire suppression systems, underscoring the need for advanced suppression technologies tailored for EVs on ships.
In the third stage (S3: uncontrolled fire spread and full vessel involvement), the critical causal chain is Improper storage of flammable materials (47.3%) → Uncontrolled fire spread and full vessel involvement (100%), represented as F27-S3. This sequence emphasizes the importance of proper storage practices, calling for stricter management protocols to ensure that flammable materials are stored safely and removed from high-risk areas.
5.2. Fire Hazard Chain Risk Probability of Ro-Ro EVs
Figure 11 highlights the probabilities of key stages in the fire hazard chain for Ro-Ro EVs. The probability of “Fire hazard and initial ignition” (S1) is notably high at 51.2%, driven by a 43.7% likelihood of EV fires and a 13.7% likelihood of shipboard fires. The primary causes of EV fires include lithium battery thermal runaway, triggered by external heat sources (19.4%), vehicle collisions (16.4%), battery overcharging or discharging (14%), and battery failure (7.48%).
The probability of “Fire propagation and intensification” (S2) is 48.4%. The most significant contributing factors are fire extinguishing failure (40.4%) and fire detection failure (28.2%). Failures in extinguishing systems are often attributed to inadequate crew emergency response (26.7%) and inadequate firefighting equipment (29.4%).
The likelihood of “Uncontrolled fire spread and full vessel involvement” (S3) is 26.3%. Key contributors include improper storage of flammable materials (16.6%) and unsealed fire compartments (10.6%).
These findings underscore the critical need for targeted risk mitigation strategies, such as enhancing battery management, improving firefighting systems, and enforcing stricter storage protocols to address vulnerabilities at each stage of the fire hazard chain.
5.3. Key Risk Factors at Each Stage of Fires on Ro-Ro EVs
Table 17 identifies EV-related risks, particularly “EV fire” and “Lithium battery thermal runaway”, as the most significant contributors to fire hazards. While secondary factors, such as external heat sources and onboard fires, also play an important role, their impact is comparatively less but still critical. Effective mitigation strategies should prioritize the management of flammable materials and the implementation of enhanced battery safety protocols. Although collision-related risks are less prominent, they remain relevant and should not be overlooked. Overall, fire hazard mitigation should focus on addressing EV- and battery-specific risks.
Table 18 highlights that fire extinguishing failures are the most critical factor in fire propagation and intensification, followed by fire detection failures. Human factors, such as inadequate crew emergency response, communication failures, and insufficient safety awareness and firefighting skills, significantly exacerbate these risks. Furthermore, inadequate firefighting equipment and fire suppression systems unsuited for lithium battery fires complicate containment efforts. These findings underscore the importance of robust fire suppression and detection systems alongside a well-trained, coordinated crew response to mitigate propagation risks effectively.
Table 19 reveals that improper storage of flammable materials is the primary factor contributing to uncontrolled fire spread (S3). To mitigate this risk, strict protocols for handling, storage, and disposal of flammable materials are essential. Additionally, the failure to maintain sealed fire compartments significantly contributes to S3, emphasizing the importance of regular inspections and adherence to compartmentalization standards. Effective fire safety management must address both the proper storage of flammable materials and the structural integrity of fire containment systems on board.
5.4. Implications
5.4.1. Fire Prevention Strategies for Ro-Ro EVs
The high probability of “Fire hazard and initial ignition” (S1) at 51.2%, compared to “Fire propagation and intensification” (S2) at 48.4% and “Uncontrolled fire spread and full vessel involvement” (S3) at 26.3%, highlights the need to prioritize measures targeting the initial ignition phase. Effective interventions at this stage can significantly mitigate overall fire risks.
Based on the key risk factor analysis in
Section 5.3 and main casual chains in
Section 5.1, recommendations for preventing fires on Ro-Ro EVs are proposed. For shipping companies, the following applies:
(1) Battery Level Monitoring: Inspect EV battery levels before boarding, focusing on vehicles with levels below 30% or above 80%, which pose a higher risk of thermal runaway. These checks address early ignition risks from EV-related battery failures identified in
Section 5.3.
(2) Charging Restrictions: Prohibit onboard EV charging to avoid electrical malfunctions in confined Ro-Ro spaces, which exacerbate fire risks.
(3) Enhanced Ventilation and Cooling: Upgrade deck ventilation and cooling systems to prevent battery overheating, especially in high ambient temperatures, as a major contributor to initial fire risks.
(4) Explosion-Proof Electrical Installations: Install explosion-proof lighting and fire detection systems on vehicle decks to reduce ignition risks from electrical malfunctions.
(5) Smoking and Appliance Ban: Enforce strict prohibitions on smoking and high-power electrical appliance use in EV storage areas to eliminate potential ignition sources.
(6) Flammable Item Restrictions: Prohibit storage of flammable items (e.g., perfumes, power banks, lighters) inside EVs, which can exacerbate ignition and fire spread.
Recommendations for Crew Members:
(1) Proper Vehicle Securing: Ensure that EVs are correctly secured to prevent damage during transit, particularly from collisions or vibrations that could trigger battery failures.
(2) Routine Maintenance and Inspections: Regularly inspect fire detection systems, electrical installations, and fuel storage to identify and resolve potential hazards.
(3) Engine Room Cleaning: Maintain engine rooms to prevent oil leaks from contacting hot surfaces, which can lead to fires. Regular cleaning minimizes ignition risks.
5.4.2. Fire Mitigation Strategies for Ro-Ro EVs
The analysis in
Section 5.1 and 5.3 reveals that the failure of fire suppression systems, particularly for lithium battery fires, is a critical factor in fire propagation. Additionally, improper storage of flammable materials and inadequate fire compartment sealing contribute significantly to fire escalation risks.
To mitigate the risks of the fire propagation and intensification of Ro-Ro EVs, we propose the following recommendations for shipping companies:
(1) Specialized Lithium Battery Fire Suppression Systems: Install advanced suppression systems tailored for lithium battery fires, with regular maintenance and testing to ensure functionality during emergencies.
(2) Enhanced Crew Training: Train crew members in EV-specific fire suppression techniques, including isolating fire zones and containing battery fires. Conduct regular joint drills to improve response coordination.
(3) Integrated Fire Systems and Crew Response: Ensure that fire detection and suppression systems are well integrated with crew operations. Regular drills should verify the effectiveness of this integration, enabling swift and coordinated actions.
(4) Routine Testing of Fire Suppression Systems: Establish protocols for periodic testing of suppression systems to ensure reliability, particularly during initial fire outbreaks.
Recommendations for Crew Members:
(1) Flammable Material Management: Ensure that flammable materials are stored in designated areas away from EV zones, with routine checks before departure to prevent escalation risks.
(2) Inspection of Fire Compartments: Regularly inspect fire-resistant doors and compartments to maintain structural integrity and prevent fire spread. Drills should include the prompt sealing of compartments in EV storage areas.
(3) Safety Awareness Training: Conduct regular training to equip crew members with skills to manage EV-specific fire risks, emphasizing evacuation procedures and proper firefighting equipment use.
5.4.3. Regulatory Actions
A comprehensive analysis highlights the need for enhanced safety standards and enforcement measures to ensure effective fire prevention and mitigation. Recommendations for Maritime Regulators are as follows:
(1) Develop Technical Standards: Establish specific guidelines for transporting EVs on Ro-Ro vessels, including requirements for equipment configurations, charging protocols, and fire suppression technologies tailored for lithium battery fires.
(2) Ensure Compliance: Conduct regular inspections of vessel certifications and seafarer training records to verify adherence to fire safety regulations, particularly those addressing EV-specific risks.
(3) Awareness Campaigns: Collaborate with shipping companies to launch fire safety campaigns targeting the crew and passengers. These campaigns should promote best practices for transporting EVs, such as securing vehicles and adhering to onboard safety rules.
6. Conclusions
This study integrates fault tree analysis (FTA) and fuzzy Bayesian network (FBN) to examine the fire hazard chain mechanisms and associated risk probabilities for Ro-Ro vessels transporting electric vehicles (EVs). The highest risk probability is for “Fire hazard and initial ignition” (51.2%), followed by “Fire propagation and intensification” (48.4%). The probability of “Uncontrolled fire spread and full vessel involvement” is lower (26.3%). Lithium battery thermal runaway is the primary trigger for initial fire ignition, caused by external heat sources (19.4%), vehicle collisions (16.4%) due to improper securing, battery overcharging or discharging (14%), and battery failure (7.48%). In the fire propagation stage, failures in extinguishing and detecting lithium battery fires, due to crew and equipment issues, are critical risk factors. Uncontrolled fire is mainly caused by improper storage of flammable materials (16.6%) and unsealed fire compartments (10.6%). These findings underscore the need for targeted EV-related risk prevention measures, including strict storage protocols, improved detection technologies, and enhanced fire suppression systems on Ro-Ro passenger vessels.
The main contributions of this paper are as follows:
(1) Fault tree modeling of fire hazard chain mechanisms for roll-on/roll-off passenger vessels transporting electric vehicles (Ro-Ro EVs): This study systematically analyzes fire risk mechanisms using maritime accident reports and expert insights. It develops fault tree models that specifically address fire hazards unique to Ro-Ro EVs. The models incorporate factors such as electric vehicle characteristics, passenger and vehicle owner behaviors, and vessel-specific features.
(2) Fire hazard chain risk assessment for Ro-Ro EVs integrating fault tree analysis (FTA) and fuzzy Bayesian network (FBN): FTA models the interdependencies among key fire elements and visualizes causal mechanisms through hierarchical structures. FBN addresses the limitations of historical data for emerging risks by incorporating expert opinions. It analyzes the propagation of hazard chain risks. The approach uses a nine-level fuzzy scoring system and categorizes risk factors with AND/OR logical relationships. This integrated FTA-FBN method provides a robust framework for assessing fire hazard chain risks in Ro-Ro EV transportation.
(3) Identification of key risk factors and practical recommendations: This study identifies critical risk factors at different stages of the fire hazard chain. It also quantifies the evolution of fire hazard chain risks and provides practical fire prevention and mitigation measures specifically tailored to Ro-Ro EVs.
We acknowledge that the type of lithium-ion batteries, such as those with nickel manganese cobalt (NMC) cathodes versus lithium iron phosphate (LFP) cathodes, could significantly impact fire hazard risk assessments for Ro-Ro EVs. The current FTA-FBN model does not incorporate specific battery parameters due to limited historical data and expert knowledge. These factors may influence the fire dynamics and failure mechanisms.
Lithium-ion battery properties, including energy density, thermal stability, and susceptibility to thermal runaway, can affect failure modes like battery failure (F1) and overcharging/discharging (E5). NMC batteries, with higher energy density, are more prone to thermal runaway, potentially increasing the risk of short circuits and fires. In contrast, LFP batteries, known for their stable thermal properties, may exhibit different failure characteristics.
Future research should integrate these battery-specific parameters into the risk model for more accurate assessments. This will require additional empirical data, consultations with battery experts, and refining fault tree and Bayesian network models to reflect the distinct behaviors of different battery chemistries in maritime fire scenarios. In addition, future studies could address the uncertainties in the fire evolution process of Ro-Ro EVs, specifically focusing on a risk analysis over extended periods. Since the case study in this paper is based on a route with a sailing time of less than one hour, it does not account for how the probability of risk factors might change over longer voyages. Future research could utilize dynamic Bayesian networks to model these time-dependent risks. Furthermore, expanding the dataset to include fire incident reports from other regions would help increase the generalizability of these findings.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}