
Enhancing Physical Spatial Resolution of Synthetic Aperture Sonar Images Based on Convolutional Neural Network


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Theory and Model
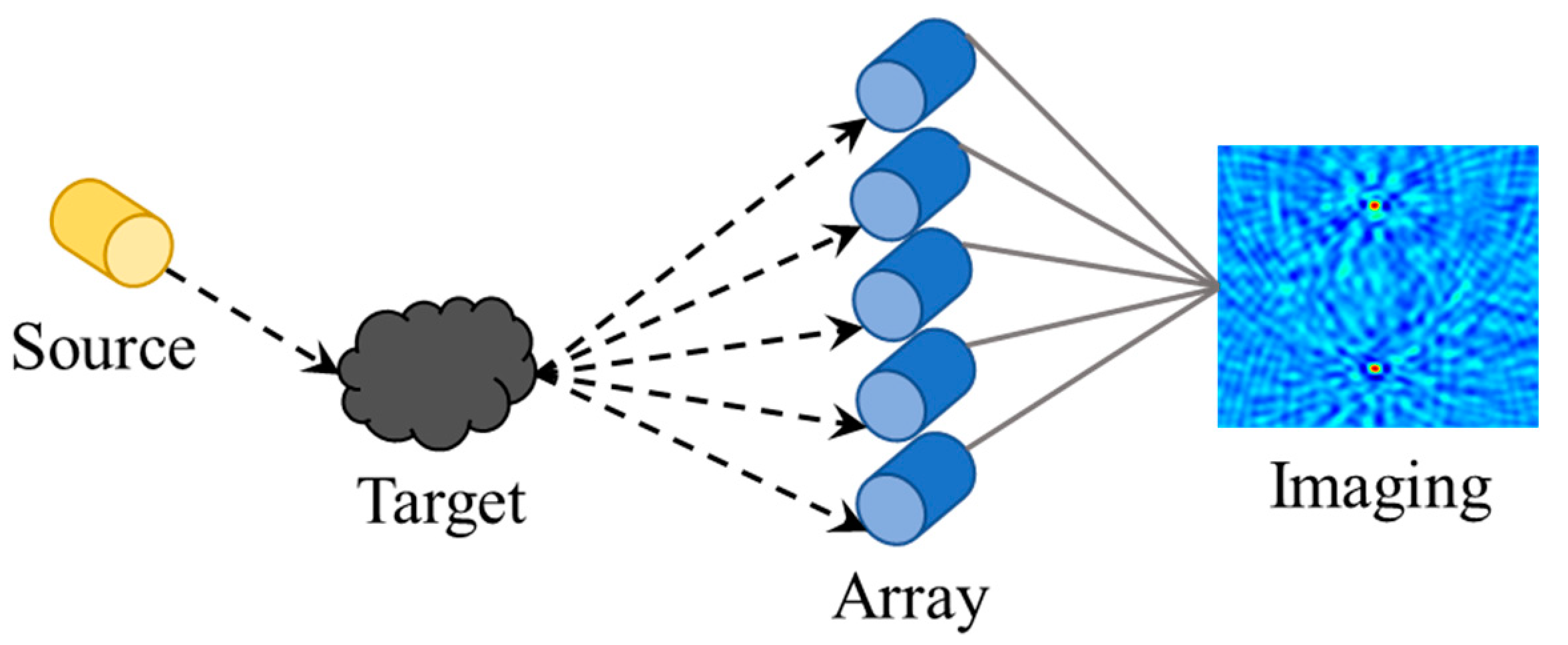
2.1. Synthetic Aperture Sonar Imaging Model
2.2. The End-to-End Neural Networks
2.3. The Construction of Simulated Dataset
3. Results and Discussion
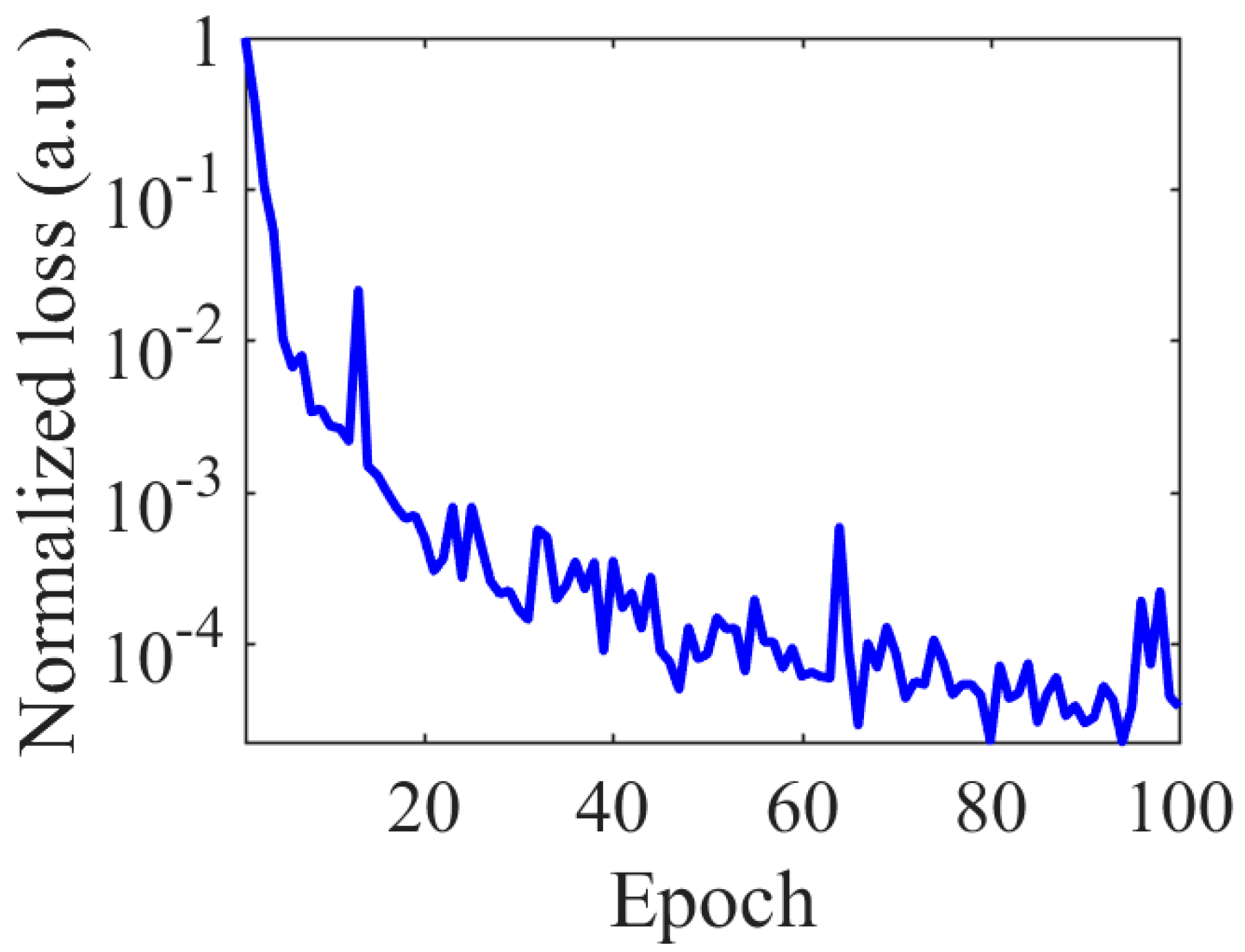
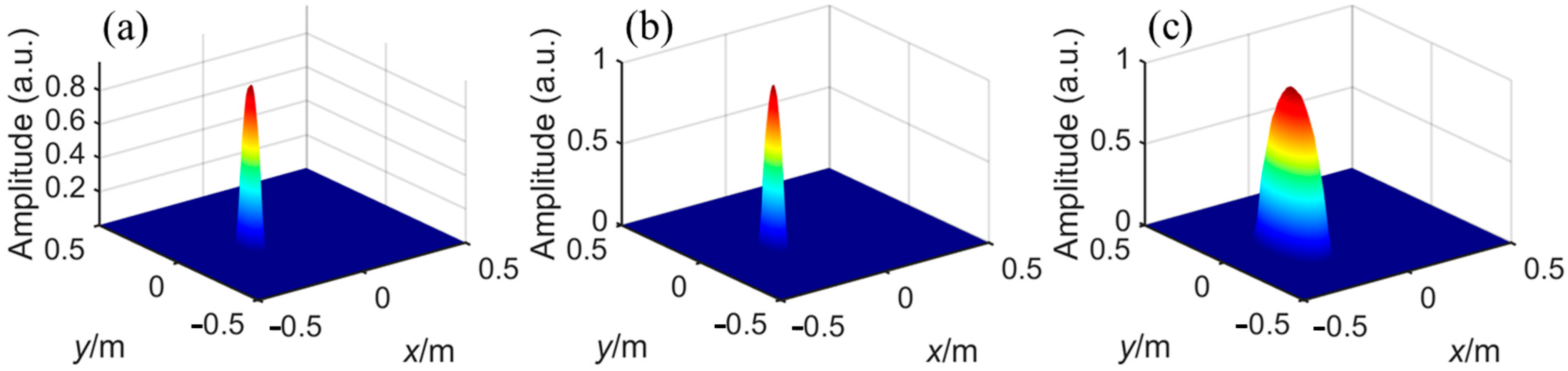
3.1. Resolution Enhancing in the Single Target Case
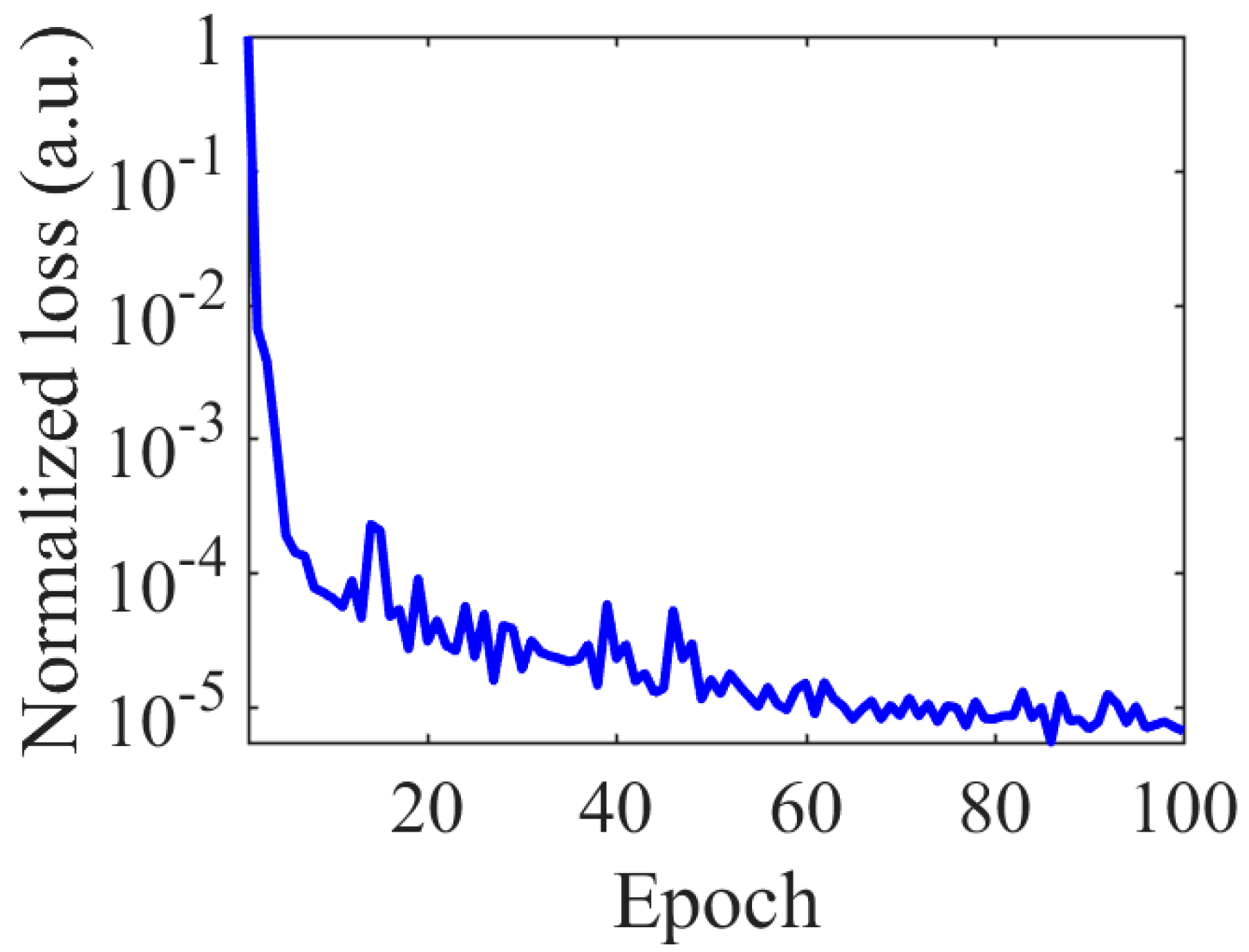
3.2. Resolution Enhancing in the Multiple Targets Case
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hayes, M.P.; Gough, P.T. Synthetic aperture sonar: A review of current status. IEEE J. Ocean. Eng. 2009, 34, 207–224. [Google Scholar] [CrossRef]
- Ning, M.; Zhong, H.; Tang, J.; Wu, H.; Zhang, J.; Zhang, P.; Ma, M. A Novel Chirp-Z Transform Algorithm for Multi-Receiver Synthetic Aperture Sonar Based on Range Frequency Division. Remote Sens. 2024, 16, 3265. [Google Scholar] [CrossRef]
- Zhang, J.; Cheng, G.; Tang, J.; Wu, H.; Tian, Z. A Subaperture Motion Compensation Algorithm for Wide-Beam, Multiple-Receiver SAS Systems. J. Mar. Sci. Eng. 2023, 11, 1627. [Google Scholar] [CrossRef]
- Marston, M.T.; Hall, R.B.; Bassett, C.; Plotnick, D.S.; Kidwell, A.N. Motion tracking of fish and bubble clouds in synthetic aperture sonar data. J. Acoust. Soc. Am. 2024, 155, 2181–2191. [Google Scholar] [CrossRef]
- Zhang, X.; Heald, G.; Lyons, P.A.; Hansen, R.E.; Hunter, A.J. Guest editorial: Recent advances in synthetic aperture sonar technology. Electron. Lett. 2023, 59, e12881. [Google Scholar] [CrossRef]
- Cheng, J.; Ge, J.; Bai, R. Enhanced Multi-Beam Echo Sounder Simulation through Distance-Aided and Height-Aided Sound Ray Marching Algorithms. J. Mar. Sci. Eng. 2024, 12, 913. [Google Scholar] [CrossRef]
- Wei, B.; Zhou, T.; Li, H.; Xing, T.; Li, Y. Theoretical and experimental study on multibeam synthetic aperture sonar. J. Acoust. Soc. Am. 2019, 145, 3177–3189. [Google Scholar] [CrossRef] [PubMed]
- Myers, V.L.; Sternlicht, D.D.; Lyons, A.P.; Hansen, R.E. Automated seabed change detection using synthetic aperture sonar: Current and future directions. In Proceedings of the International Conference on Synthetic Aperture Sonar and Synthetic Aperture Radar, Lerici, Italy, 17–19 September 2014; pp. 1–10. [Google Scholar]
- Gupta, K.S.; Chauhan, S.C.R.; Kumar, V. Channel modelling in underwater media: A wireless communication technique perspective. Phys. Scr. 2024, 99, 112003. [Google Scholar] [CrossRef]
- Wan, L.; Deng, S.; Chen, Y.; Cheng, E. Sparse channel estimation for underwater acoustic OFDM systems with super-nested pilot design. Signal Process. 2025, 227, 109709. [Google Scholar] [CrossRef]
- Xiang, D.; He, D.; Wang, H.; Qu, Q.; Shan, C.; Zhu, X.; Zhong, J.; Gao, P. Attenuated color channel adaptive correction and bilateral weight fusion for underwater image enhancement. Opt. Lasers Eng. 2025, 184, 108575. [Google Scholar] [CrossRef]
- Ji, M.; Ren, G.; Liu, J.; Xu, Q.; Ren, R. Multi-person cooperative positioning of forest rescuers based on inertial navigation system (INS), global navigation satellite system (GNSS), and ZigBee. Measurement 2025, 241, 115669. [Google Scholar] [CrossRef]
- Sutton, T.J.; Griffiths, H.D.; Hetet, A.P.; Perrot, Y.; Chapman, S.A. Experimental validation of autofocus algorithms for high-resolution imaging of the seabed using synthetic aperture sonar. IEE Proc.-Radar Sonar Navig. 2003, 150, 78–83. [Google Scholar] [CrossRef]
- Zhao, F.; Mizuno, K.; Tabeta, S.; Hayami, H.; Fujimoto, Y.; Shimada, T. Survey of freshwater mussels using high-resolution acoustic imaging sonar and deep learning-based object detection in Lake Izunuma, Japan. Aquat. Conserv. Mar. Freshw. Ecosyst. 2023, 34, e4040. [Google Scholar] [CrossRef]
- Sung, M.; Joe, H.; Kim, J.; Yu, S.C. Convolutional Neural Network Based Resolution Enhancement of Underwater Sonar Image Without Losing Working Range of Sonar Sensors. In Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–6. [Google Scholar]
- Sung, M.; Kim, J.; Yu, S.C. Image-based Super Resolution of Underwater Sonar Images using Generative Adversarial Network. In Proceedings of the TENCON 2018-2018 IEEE Region 10 Conference, Jeju, Republic of Korea, 28–31 October 2018; pp. 0457–0461. [Google Scholar]
- Islam, M.J.; Enan, S.S.; Luo, P.; Sattar, J. Underwater Image Super-Resolution using Deep Residual Multipliers. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 900–906. [Google Scholar]
- Xu, P.; Xu, S.; Shi, K.; Ou, M.; Zhu, H.; Xu, G.; Gao, D.; Li, G.; Zhao, Y. Prediction of Water Temperature Based on Graph Neural Network in a Small-Scale Observation via Coastal Acoustic Tomography. Remote Sens. 2024, 16, 646. [Google Scholar] [CrossRef]
- Zang, X.; Yin, T.; Hou, Z.; Mueller, R.P.; Deng, Z.D.; Jacobson, P.T. Deep Learning for Automated Detection and Identification of Migrating American Eel Anguilla rostrata from Imaging Sonar Data. Remote Sens. 2021, 13, 2671. [Google Scholar] [CrossRef]
- Qiao, J.; Li, D.; Zheng, M.; Liu, Z.; Yang, H. Neural network-based adaptive tracking control for denitrification and aeration processes with time delays. IEEE Trans. Neural Netw. Learn. Syst. 2024, 35, 15507–15516. [Google Scholar] [CrossRef] [PubMed]
- Dao, P.N.; Phung, M.H. Nonlinear robust integral based actor–critic reinforcement learning control for a perturbed three-wheeled mobile robot with mecanum wheels. Comput. Electr. Eng. 2025, 121, 109870. [Google Scholar] [CrossRef]
- Christensen, H.J.; Mogensen, V.L.; Ravn, O. Side-Scan Sonar Imaging: Real-Time Acoustic Streaming. IFAC-Pap. 2021, 54, 458–463. [Google Scholar] [CrossRef]
- Sung, M.; Kim, J.; Lee, M.; Kim, B.; Kim, T.; Kim, J.; Yu, S. Realistic Sonar Image Simulation Using Deep Learning for Underwater Object Detection. Int. J. Control. Autom. Syst. 2020, 18, 523–534. [Google Scholar] [CrossRef]
- Haahr, J.C.; Valdemar, L.M.; Ravn, O. Deep Learning based Segmentation of Fish in Noisy Forward Looking MBES Images. IFAC-Pap. 2020, 53, 14546–14551. [Google Scholar]
- Cui, H.; Zhao, W.; Wang, Y.; Fan, Y.; Qiu, L.; Zhu, K. Improving spatial resolution of confocal raman microscopy by super-resolution image restoration. Opt. Express 2016, 24, 10767–10776. [Google Scholar] [CrossRef] [PubMed]
- Pacifici, F.; Longbotham, N.; Emery, W.J. The Importance of Physical Quantities for the Analysis of Multitemporal and Multiangular Optical Very High Spatial Resolution Images. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6241–6256. [Google Scholar] [CrossRef]
- Alvaro, V.; Karin, R.; Simon, J. A new metric for the assessment of spatial resolution in satellite imagers. Int. J. Appl. Earth Obs. Geoinf. 2022, 114, 103051. [Google Scholar]
- Xu, J.; Zhang, P.; Chen, Y. Surface Plasmon Resonance Biosensors: A Review of Molecular Imaging with High Spatial Resolution. Biosensors 2024, 14, 84. [Google Scholar] [CrossRef]
- Su, Y.; Chen, X.; Cang, C.; Li, F.; Rao, P. A Space Target Detection Method Based on Spatial–Temporal Local Registration in Complicated Backgrounds. Remote Sens. 2024, 16, 669. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, P.; Gao, D.; Yu, S.; Li, G.; Zhao, Y.; Xu, G. Enhancing Physical Spatial Resolution of Synthetic Aperture Sonar Images Based on Convolutional Neural Network. J. Mar. Sci. Eng. 2025, 13, 134. https://doi.org/10.3390/jmse13010134
Xu P, Gao D, Yu S, Li G, Zhao Y, Xu G. Enhancing Physical Spatial Resolution of Synthetic Aperture Sonar Images Based on Convolutional Neural Network. Journal of Marine Science and Engineering. 2025; 13(1):134. https://doi.org/10.3390/jmse13010134
Chicago/Turabian StyleXu, Pan, Dongbao Gao, Shui Yu, Guangming Li, Yun Zhao, and Guojun Xu. 2025. "Enhancing Physical Spatial Resolution of Synthetic Aperture Sonar Images Based on Convolutional Neural Network" Journal of Marine Science and Engineering 13, no. 1: 134. https://doi.org/10.3390/jmse13010134
APA StyleXu, P., Gao, D., Yu, S., Li, G., Zhao, Y., & Xu, G. (2025). Enhancing Physical Spatial Resolution of Synthetic Aperture Sonar Images Based on Convolutional Neural Network. Journal of Marine Science and Engineering, 13(1), 134. https://doi.org/10.3390/jmse13010134