
Ship Bridge OOW Activity Status Detection Using Wi-Fi Beamforming Feedback Information

Abstract
1. Introduction
- Hull deformation and vibrations significantly impact the propagation of Wi-Fi signals indoors, affecting the reliability of signal-feature-based estimation [9]. Designing robust Wi-Fi sensing methodologies for indoor ship environments, particularly under low signal-to-noise ratios, is crucial for accurate and stable sensing of ship driver states.
- Current driving behavior research lacks in-depth understanding and comprehensive modeling of the subtle behavioral patterns of ship drivers [10]. How to accurately interpret and recognize the mechanism of driving state and its modeling in ship environments has not been adequately addressed, representing a second challenge in improving the accuracy and effectiveness of ship driving safety monitoring.
- Current research on the state of OOWs mostly focuses on the analysis of single indicators, such as fatigue level or attention concentration [11,12]. This single-dimension research method fails to comprehensively reveal the complexity and dynamic changes of OOW status, making how to comprehensively perceive and evaluate OOW driving status a third challenge.
- To address the problem of traditional Wi-Fi CSI sensing methods being insufficiently accurate in indoor ship environments, this study uses BFI-based wireless sensing technology for cockpit watchman detection. Thanks to the directional advantages of BFI, the impact of the complex indoor ship environment on the accuracy of wireless sensing is reduced.
- To address the problem of only a single index being considered in current approaches to detecting the state of OOWs, this study introduces multiple indexes, such as the number of active people, action entropy, action time, etc., which can comprehensively assess the activity degree of OOWs from multiple perspectives while providing a more scientific and comprehensive evaluation method to ensure the safety of ship driving.
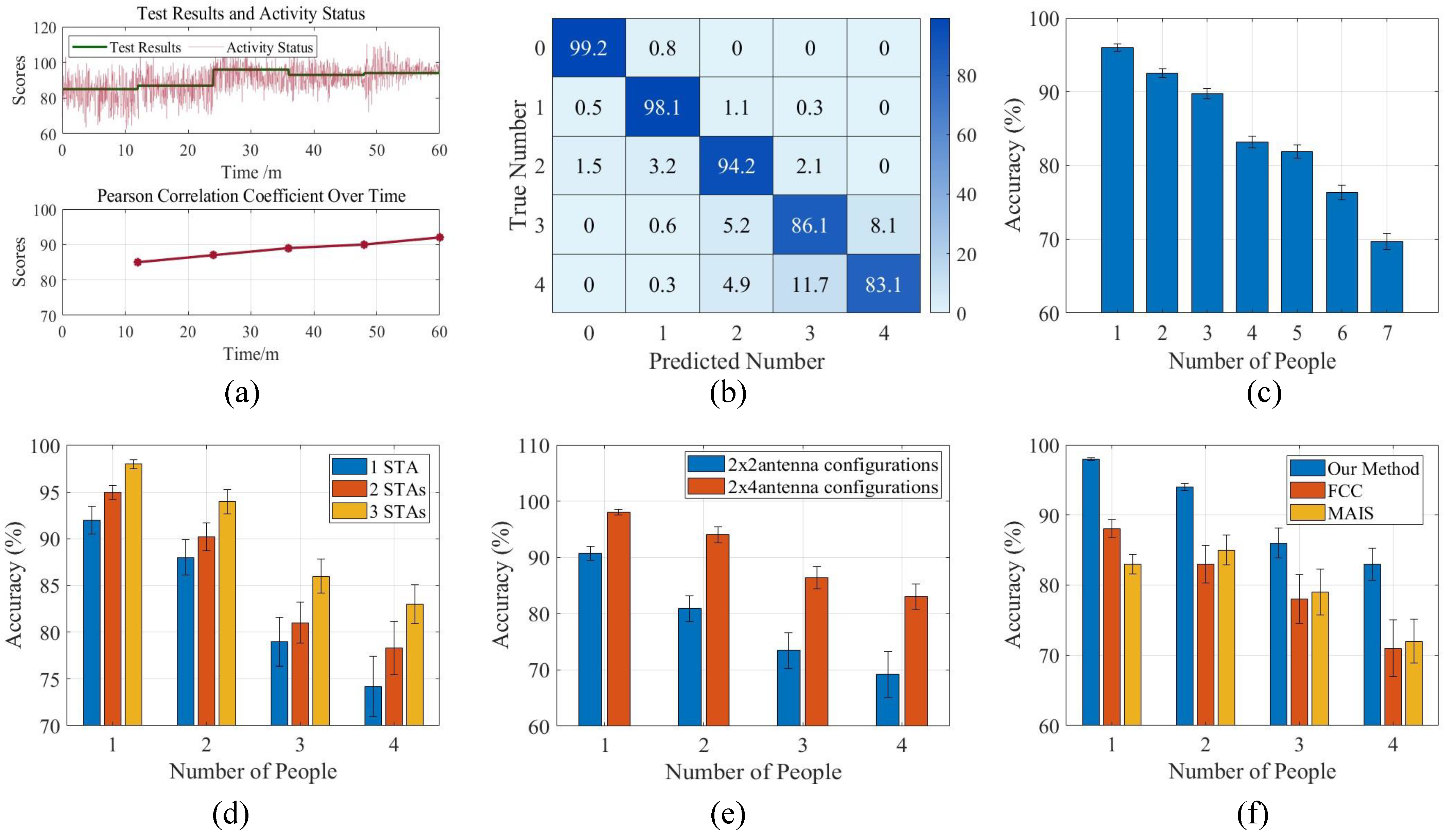
- Finally, this study conducts extensive experiments of the proposed method on a real-world ship bridge, with the experimental results showing that the overall recognition accuracy of the method reaches 92.4%.
2. Related Work and Background
2.1. Related Work
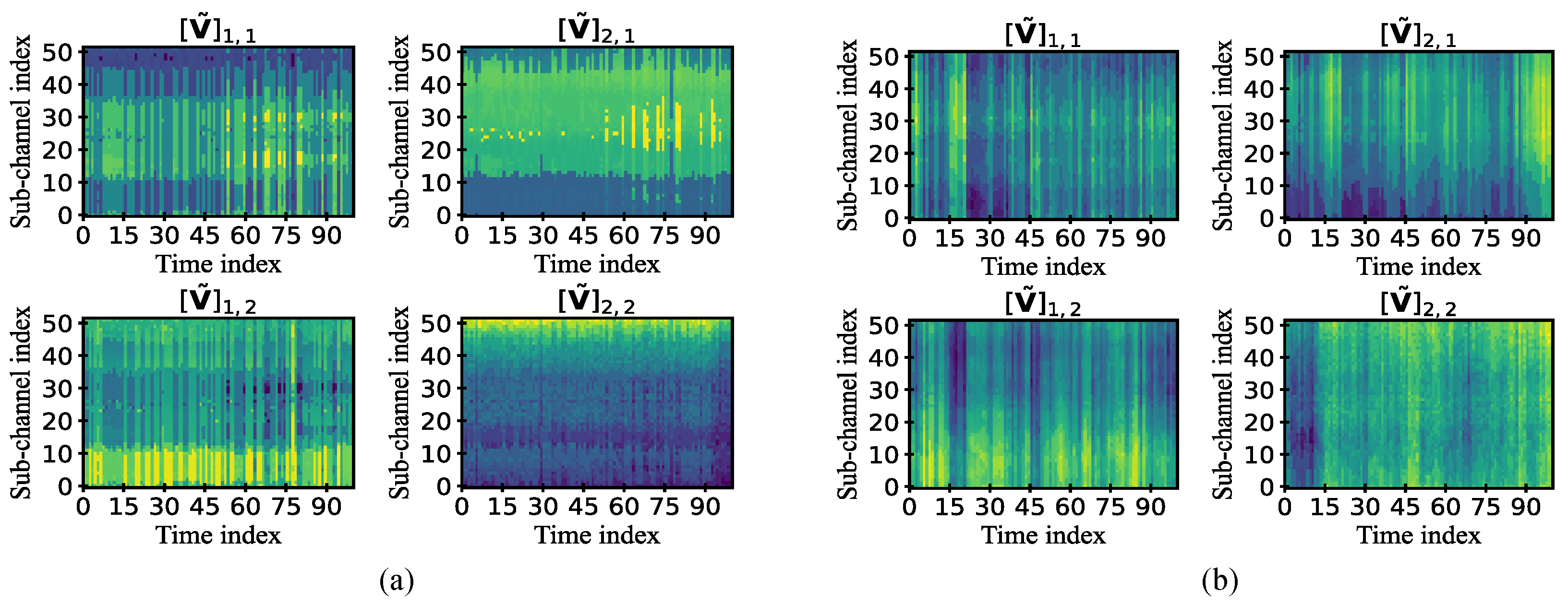
2.2. Wi-Fi BFI Sensing
3. Methodology
3.1. Overview of the Methodology
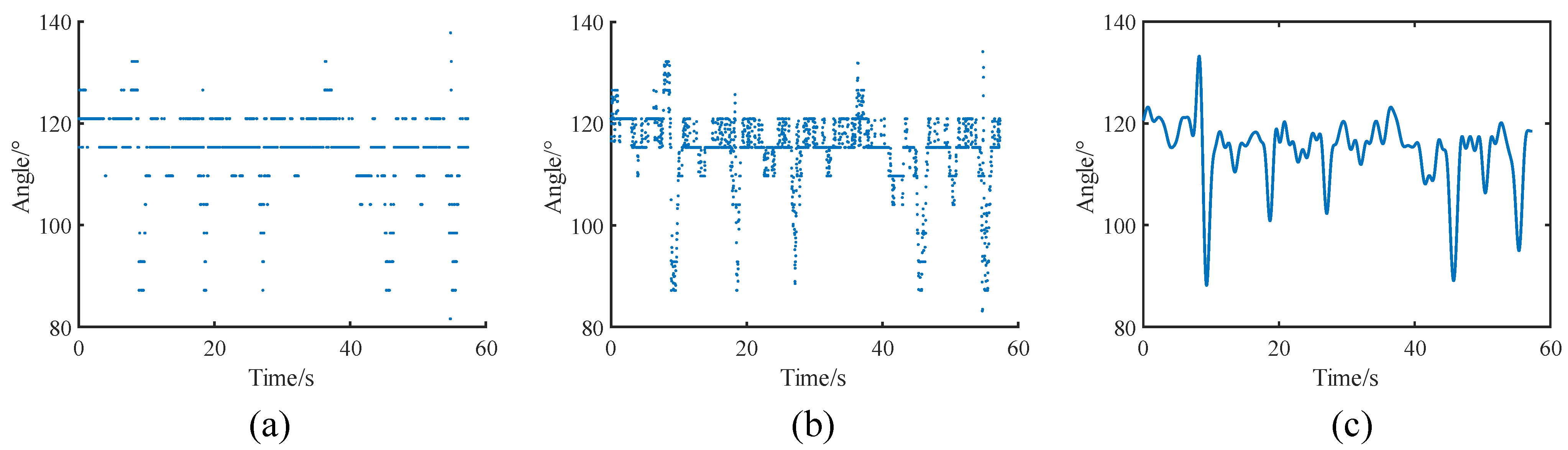
3.2. Data Collection and Preprocessing
3.3. Activity Feature Extraction
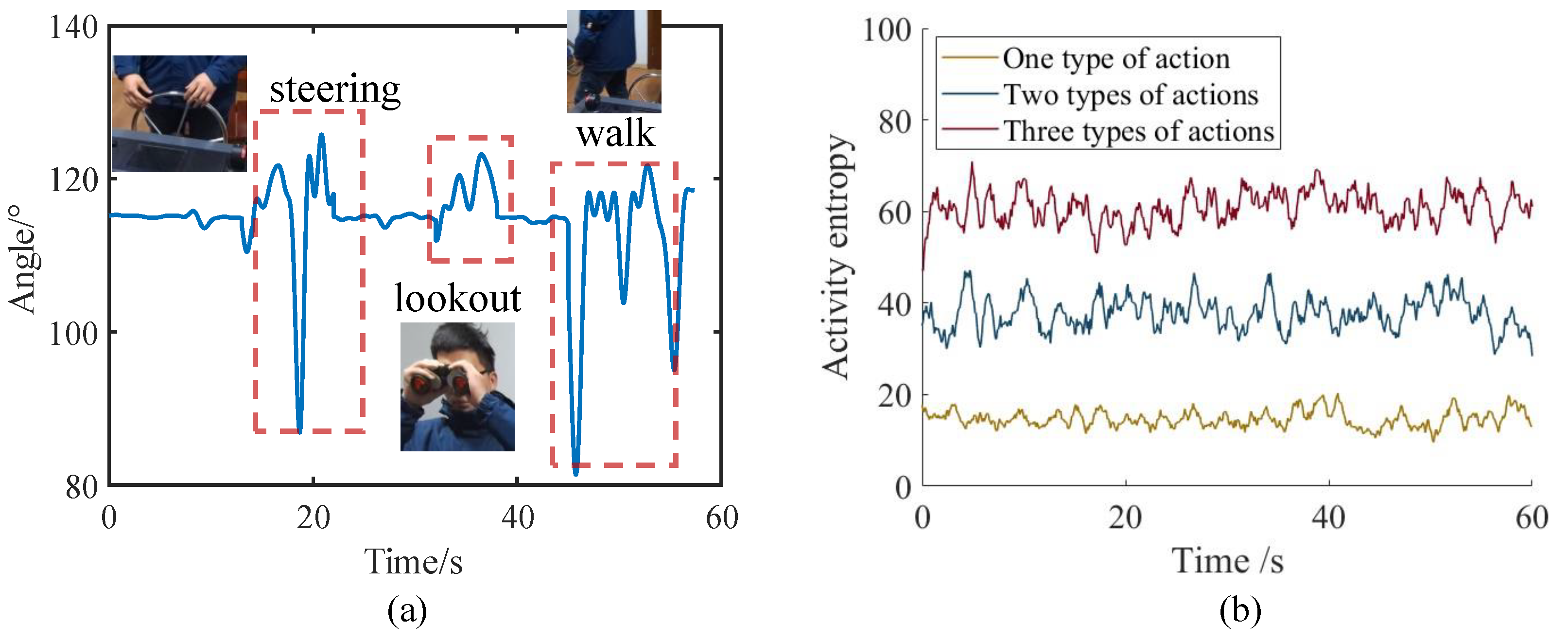
3.3.1. Activty Entropy
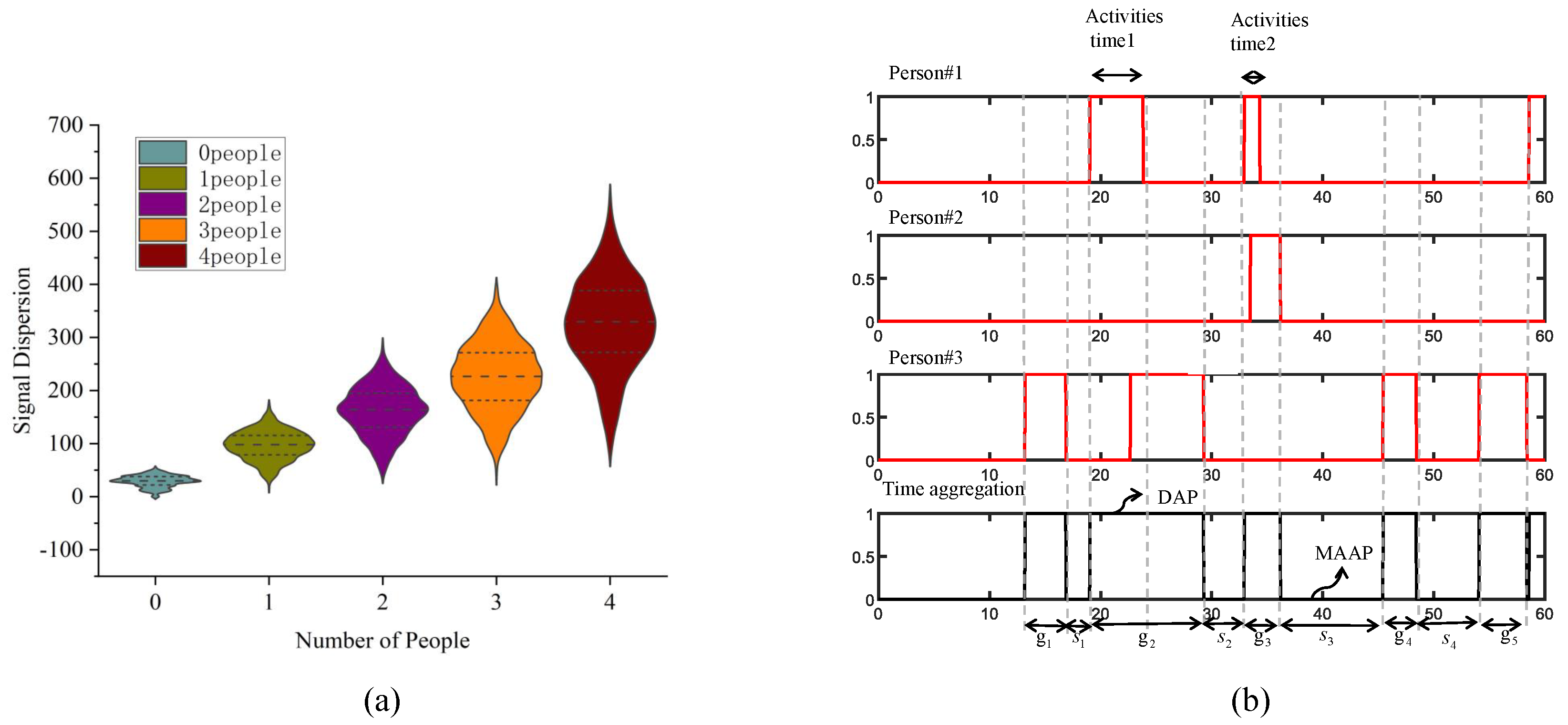
3.3.2. Number of Active OOWs
3.3.3. Total Number of People on Duty
3.4. Driving Activity Evaluation
4. Experiments
4.1. Experimental Setup
4.2. Experimental Procedures
4.3. Detection Performance
5. Conclusions
- The proposed method showcases high accuracy, especially in scenarios with fewer personnel, highlighting its potential for monitoring duties typically involving a small number of crew members.
- While the system maintains commendable accuracy across varying group sizes, a decrease in performance is noted as the number of individuals rises, reflecting the intrinsic challenges of dense and active maritime environments.
- Despite the complexities inherent to ship bridges, such as restricted spaces and the presence of operational equipment, the proposed method demonstrates significant effectiveness in distinguishing between different levels of activity.
- The results suggest the applicability of the proposed approach for enhancing operational monitoring and safety management in maritime navigation, providing a foundation for real-time assessment of bridge activities.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Papadimitriou, E.; Schneider, C.; Tello, J.; Damen, W.; Vrouenraets, M.; Ten Broeke, A. Transport safety and human factors in the era of automation: What can transport modes learn from each other? Accid. Anal. Prev. 2020, 144, 105656. [Google Scholar] [CrossRef] [PubMed]
- European Railway Agency. Railway Safety Performance in the European Union; European Commission: Luxembourg, 2011.
- Cao, Y.; Wang, X.; Yang, Z.; Wang, J.; Wang, H.; Liu, Z. Research in marine accidents: A bibliometric analysis, systematic review and future directions. Ocean. Eng. 2023, 284, 115048. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; Chen, P.; Negenborn, R.; Van Gelder, P. Ship collision avoidance methods: State-of-the-art. Saf. Sci. 2020, 121, 451–473. [Google Scholar] [CrossRef]
- Kaplan, S.; Guvensan, M.; Yavuz, A.; Karalurt, Y. Driver behavior analysis for safe driving: A survey. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3017–3032. [Google Scholar] [CrossRef]
- Restuccia, F. IEEE 802.11 bf: Toward ubiquitous Wi-Fi sensing. arXiv 2021, arXiv:2103.14918. [Google Scholar]
- Paik, B.; Cho, S.; Park, B.; Lee, D.; Bae, B. Development of real-time monitoring system using wired and wireless networks in a full-scale ship. Int. J. Nav. Archit. Ocean. Eng. 2010, 2, 132–138. [Google Scholar]
- Heo, S.; Kim, J. Measurements Data-Based Location Determination for Characterizing Indoor Signal Propagations of the Shipboard Sensor Nodes. Wirel. Pers. Commun. 2016, 90, 1405–1412. [Google Scholar] [CrossRef]
- Chen, M.; Liu, K.; Ma, J.; Gu, Y.; Dong, Z.; Liu, C. SWIM: Speed-aware WiFi-based passive indoor localization for mobile ship environment. IEEE Trans. Mob. Comput. 2019, 20, 765–779. [Google Scholar] [CrossRef]
- Wang, W.; Liu, A.; Shahzad, M.; Ling, K.; Lu, S. Understanding and Modeling of WiFi Signal Based Human Activity Recognition. In Proceedings of the 21th Annual International Conference on Mobile Computing and Networking (MobiCom’15), Paris, France, 7–11 September 2015. [Google Scholar]
- Zheng, T.; Chen, Z.; Cai, C.; Luo, J.; Zhang, X. V2iFi: In-vehicle vital sign monitoring via compact RF sensing. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2020, 4, 70. [Google Scholar] [CrossRef]
- Bai, Y.; Wang, Z.; Zheng, K.; Wang, X.; Wang, J. WiDrive: Adaptive WiFi-based recognition of driver activity for real-time and safe takeover. In Proceedings of the 2019 IEEE 39th International Conference on Distributed Computing Systems (ICDCS), Dallas, TX, USA, 7–10 July 2019; pp. 901–911. [Google Scholar]
- Haque, K.; Meneghello, F.; Restuccia, F. Wi-BFI: Extracting the IEEE 802.11 Beamforming Feedback Information from Commercial Wi-Fi Devices. In Proceedings of the 17th ACM Workshop on Wireless Network Testbeds, Experimental Evaluation & Characterization, Madrid, Spain, 6 October 2023; pp. 104–111. [Google Scholar]
- Bergasa, L.M.; Nuevo, J.; Sotelo, M.A.; Barea, R.; Lopez, M.E. Real-time system for monitoring driver vigilance. IEEE Trans. Intell. Transp. Syst. 2006, 7, 63–77. [Google Scholar] [CrossRef]
- Lützhöft, M.; Dukic, T. Show me where you look and I’ll tell you if you’re safe: Eye tracking of maritime watchkeepers. In Proceedings of the 39th Nordic Ergonomics Society Conference, Lysekil, Sweden, 1–3 October 2007; pp. 75–78. [Google Scholar]
- Youn, I.H.; Park, D.J.; Yim, J.B. Analysis of lookout activity in a simulated environment to investigate maritime accidents caused by human error. Appl. Sci. 2018, 9, 4. [Google Scholar] [CrossRef]
- Li, K.; Gong, Y.; Ren, Z. A fatigue driving detection algorithm based on facial multi-feature fusion. IEEE Access 2020, 8, 101244–101259. [Google Scholar] [CrossRef]
- Zhao, C.; Zhang, W.; Chen, C.; Yang, X.; Yue, J.; Han, B. Recognition of unsafe onboard mooring and unmooring operation behavior based on improved YOLO-v4 algorithm. J. Mar. Sci. Eng. 2023, 11, 291. [Google Scholar] [CrossRef]
- Ma, Y.; Zhou, G.; Wang, S. WiFi sensing with channel state information: A survey. ACM Comput. Surv. (CSUR) 2019, 52, 1–36. [Google Scholar] [CrossRef]
- Chen, C.; Song, H.; Li, Q.; Meneghello, F.; Restuccia, F.; Cordeiro, C. Wi-Fi sensing based on IEEE 802.11 bf. IEEE Commun. Mag. 2020, 61, 121–127. [Google Scholar] [CrossRef]
- Kanda, T.; Sato, T.; Awano, H.; Kondo, S.; Yamamoto, K. Respiratory rate estimation based on WiFi frame capture. In Proceedings of the 2022 IEEE 19th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 8–11 January 2022; pp. 881–884. [Google Scholar]
- He, Y.; Chen, Y.; Hu, Y.; Zeng, B. WiFi vision: Sensing, recognition, and detection with commodity MIMO-OFDM WiFi. IEEE Internet Things J. 2020, 7, 8296–8317. [Google Scholar] [CrossRef]
- Haque, K.; Zhang, M.; Meneghello, F.; Restuccia, F. BeamSense: Rethinking Wireless Sensing with MU-MIMO Wi-Fi Beamforming Feedback. arXiv 2023, arXiv:2303.09687. [Google Scholar]
- Liu, K.; Chen, M.; Cai, E.; Ma, J.; Liu, S. Indoor localization strategy based on fault-tolerant area division for shipboard surveillance. Autom. Constr. 2018, 95, 206–218. [Google Scholar] [CrossRef]
- Chen, M.; Ma, J.; Zeng, X.; Liu, K.; Chen, M.; Zheng, K.; Wang, K. MD-alarm: A novel manpower detection method for ship bridge watchkeeping using Wi-Fi signals. IEEE Trans. Instrum. Meas. 2022, 71, 1–13. [Google Scholar] [CrossRef]
- Itahara, S.; Kondo, S.; Yamashita, K.; Nishio, T.; Yamamoto, K.; Koda, Y. Beamforming feedback-based model-driven angle of departure estimation toward legacy support in WiFi sensing: An experimental study. IEEE Access 2022, 10, 59737–59747. [Google Scholar] [CrossRef]
- Habib, U.; Zucker, G.; Blochle, M.; Judex, F.; Haase, J. Outliers detection method using clustering in buildings data. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 694–700. [Google Scholar]
- Di Domenico, S.; De Sanctis, M.; Cianca, E.; Bianchi, G. A trained-once crowd counting method using differential wifi channel state information. In Proceedings of the 3rd International on Workshop on Physical Analytics, Singapore, 26 June 2016; pp. 37–42. [Google Scholar]
- Huang, S.; Cai, N.; Pacheco, P.; Narrandes, S.; Wang, Y.; Xu, W. Applications of support vector machine (SVM) learning in cancer genomics. Cancer Genom. Proteom. 2018, 15, 41–51. [Google Scholar]
- Qi, X.; Wang, H.; Chu, J.; Chiam, K. Effect of autocorrelation function model on spatial prediction of geological interfaces. Can. Geotech. J. 2022, 59, 583–600. [Google Scholar] [CrossRef]
- Last, G.; Penrose, M. Lectures on the Poisson Process; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Giambene, G. Queuing Theory and Telecommunications; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: Berlin/Heidelberg, Germany, 2006; Volume 2, pp. 1122–1128. [Google Scholar]
- Zhang, Z. Microsoft kinect sensor and its effect. IEEE Multimed. 2012, 19, 4–10. [Google Scholar] [CrossRef]
- Feng, C.; Arshad, S.; Liu, Y. Mais: Multiple activity identification system using channel state information of wifi signals. In Proceedings of the Wireless Algorithms, Systems, and Applications: 12th International Conference, WASA 2017, Guilin, China, 19–21 June 2017; Proceedings 12. pp. 419–432. [Google Scholar]
- Depatla, S.; Mostofi, Y. Crowd counting through walls using WiFi. In Proceedings of the 2018 IEEE International Conference on Pervasive Computing and Communications (PerCom), Athens, Greece, 19–23 March 2018; pp. 1–10. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | #1 | #2 | #3 | #4 | #5 | #6 | #7 | #8 | #9 |
|---|---|---|---|---|---|---|---|---|---|
| Age | 22 | 25 | 21 | 23 | 22 | 34 | 25 | 26 | 33 |
| Height (cm) | 182 | 168 | 172 | 170 | 186 | 176 | 165 | 174 | 178 |
| Weight (kg) | 73 | 61 | 57 | 52 | 75 | 62 | 58 | 61 | 60 |
| Gender | M | M | M | F | M | M | M | M | M |
| Number of People | Active Time Accuracy | Average Delay |
|---|---|---|
| 1 | 96.5% | 37 ms |
| 2 | 94.3% | 45 ms |
| 3 | 93.5% | 41 ms |
| 4 | 91.3% | 47 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, M.; Zhang, L.; Liu, Y.; Zhang, Y.; Liu, C.; Chen, M. Ship Bridge OOW Activity Status Detection Using Wi-Fi Beamforming Feedback Information. J. Mar. Sci. Eng. 2024, 12, 872. https://doi.org/10.3390/jmse12060872
Chen M, Zhang L, Liu Y, Zhang Y, Liu C, Chen M. Ship Bridge OOW Activity Status Detection Using Wi-Fi Beamforming Feedback Information. Journal of Marine Science and Engineering. 2024; 12(6):872. https://doi.org/10.3390/jmse12060872
Chicago/Turabian StyleChen, Mengda, Liang Zhang, Yang Liu, Yifan Zhang, Cheng Liu, and Mozi Chen. 2024. "Ship Bridge OOW Activity Status Detection Using Wi-Fi Beamforming Feedback Information" Journal of Marine Science and Engineering 12, no. 6: 872. https://doi.org/10.3390/jmse12060872
APA StyleChen, M., Zhang, L., Liu, Y., Zhang, Y., Liu, C., & Chen, M. (2024). Ship Bridge OOW Activity Status Detection Using Wi-Fi Beamforming Feedback Information. Journal of Marine Science and Engineering, 12(6), 872. https://doi.org/10.3390/jmse12060872