


Intelligent Detection of Marine Offshore Aquaculture with High-Resolution Optical Remote Sensing Images
 ,
,
Abstract
1. Introduction
2. Study Area and Data
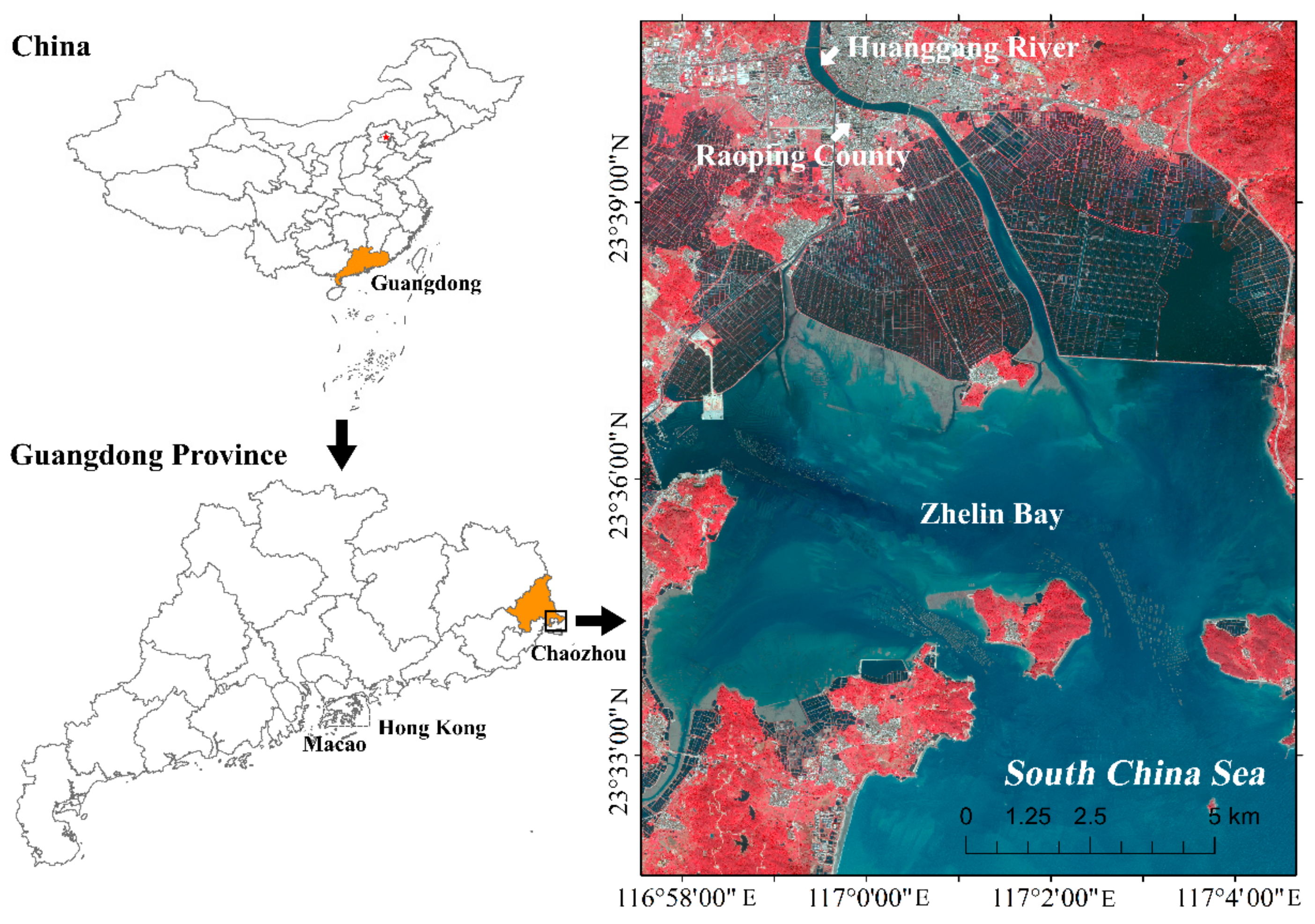
2.1. Overview of the Study Area
2.2. Data
2.2.1. Google Earth Imagery Dataset
2.2.2. Satellite Imagery Dataset
2.2.3. SR-Augmented Satellite Imagery Dataset
2.3. Data Augmentation
- (1)
- Flip: the array of the image was flipped vertically.
- (2)
- 90-degree rotation: the image was rotated 90 degrees clockwise or counterclockwise.
- (3)
- Random rotation: the image was rotated around the centroid with a rotation degree randomly chosen from [0, 30].
- (4)
- Change hue: a randomly selected degree of hue enhancement from the range [–15, 15] was applied to the image.
- (5)
- Change saturation: a randomly selected saturation enhancement value from the range [−15, 15] was applied to the image.
- (6)
- Change brightness: a randomly selected a brightness enhancement value from the range [0, 15] was applied to the image.
- (7)
- Mosaic: four different training images were combined in a mosaic.
3. Methods
3.1. Models
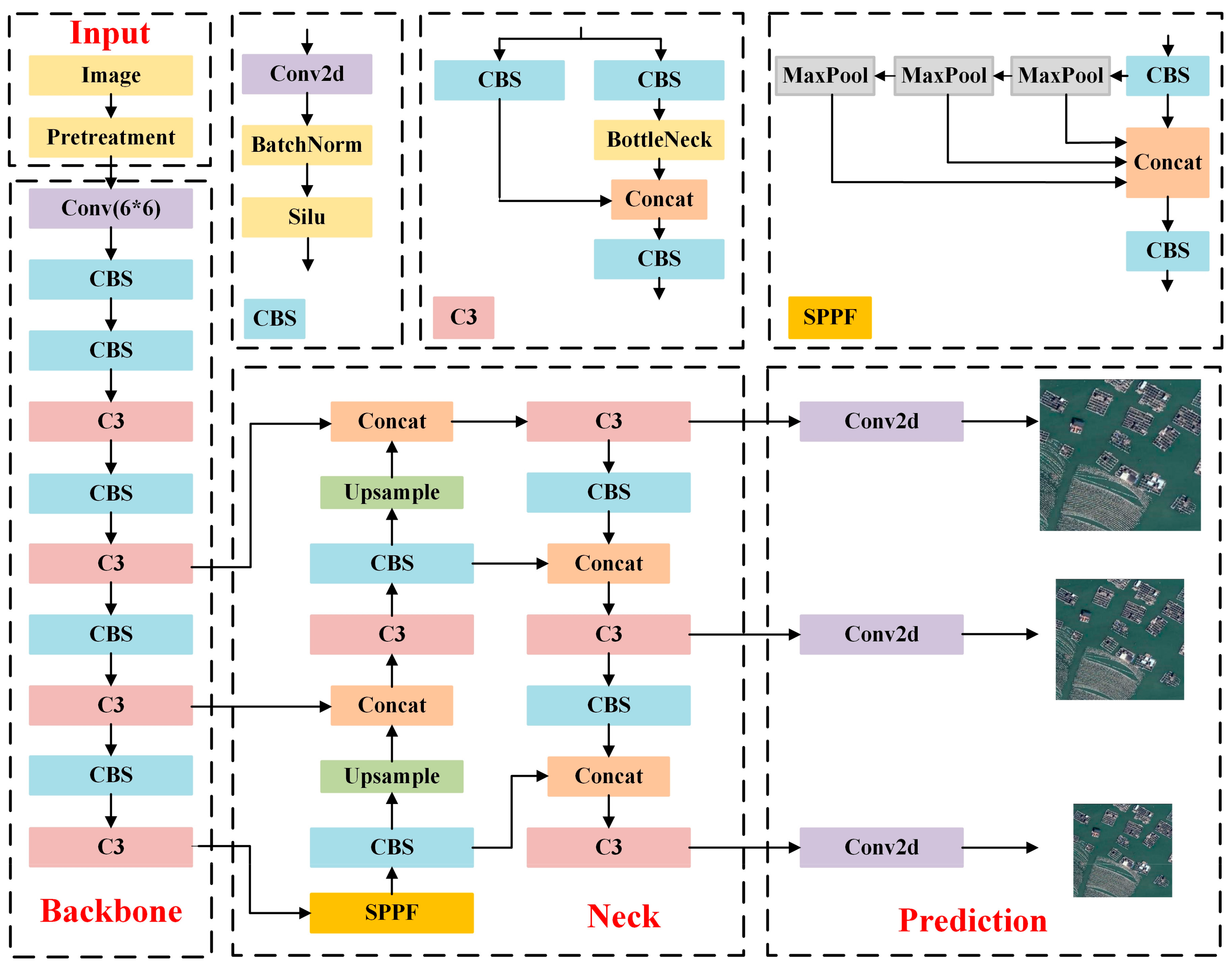
3.1.1. YOLOv5
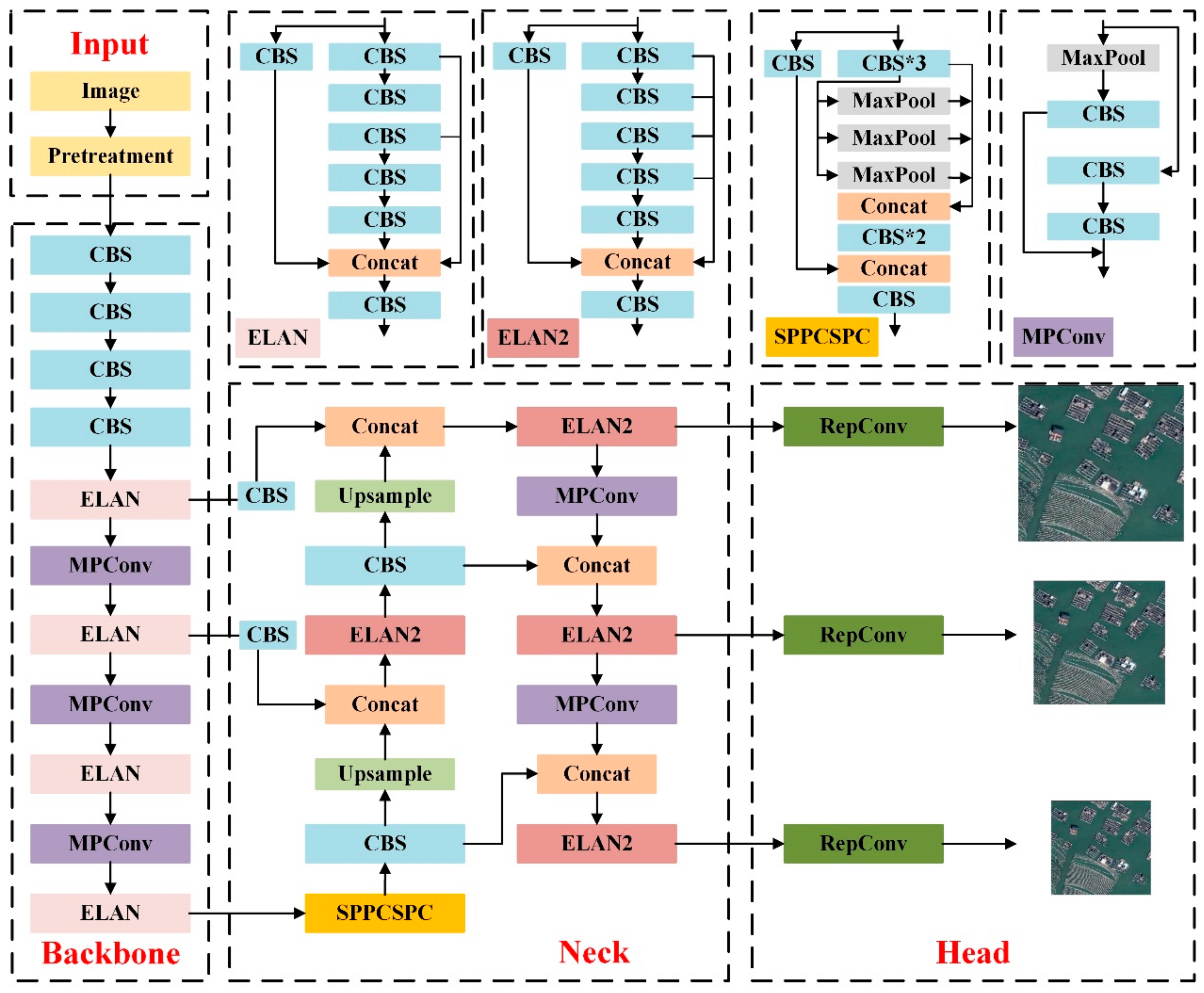
3.1.2. YOLOv7
3.2. Experiment Environment
3.3. Model Parameters
3.4. Performance Evaluation
4. Results and Discussion
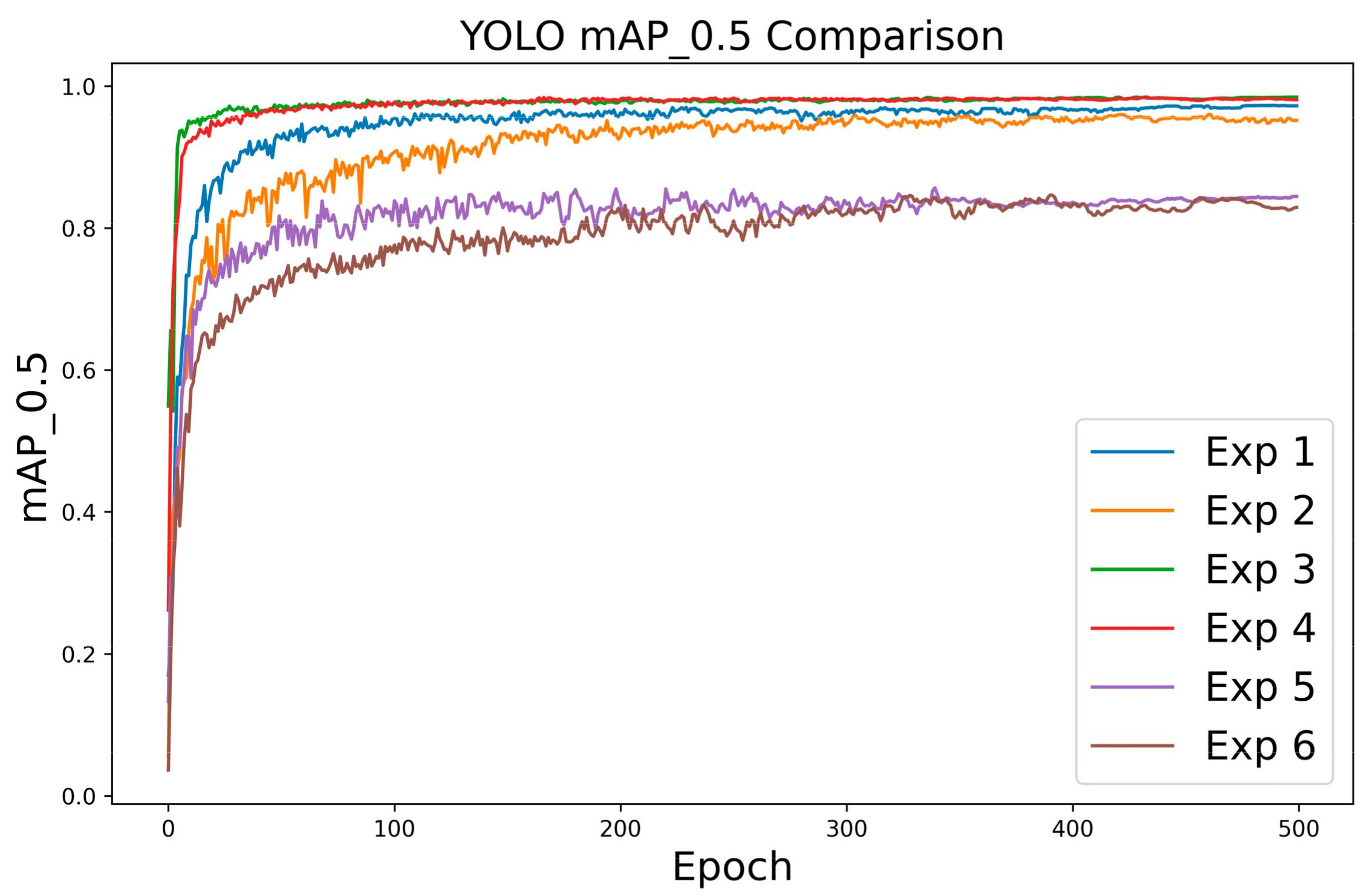
4.1. Performance Evaluation
4.2. FPS Comparison
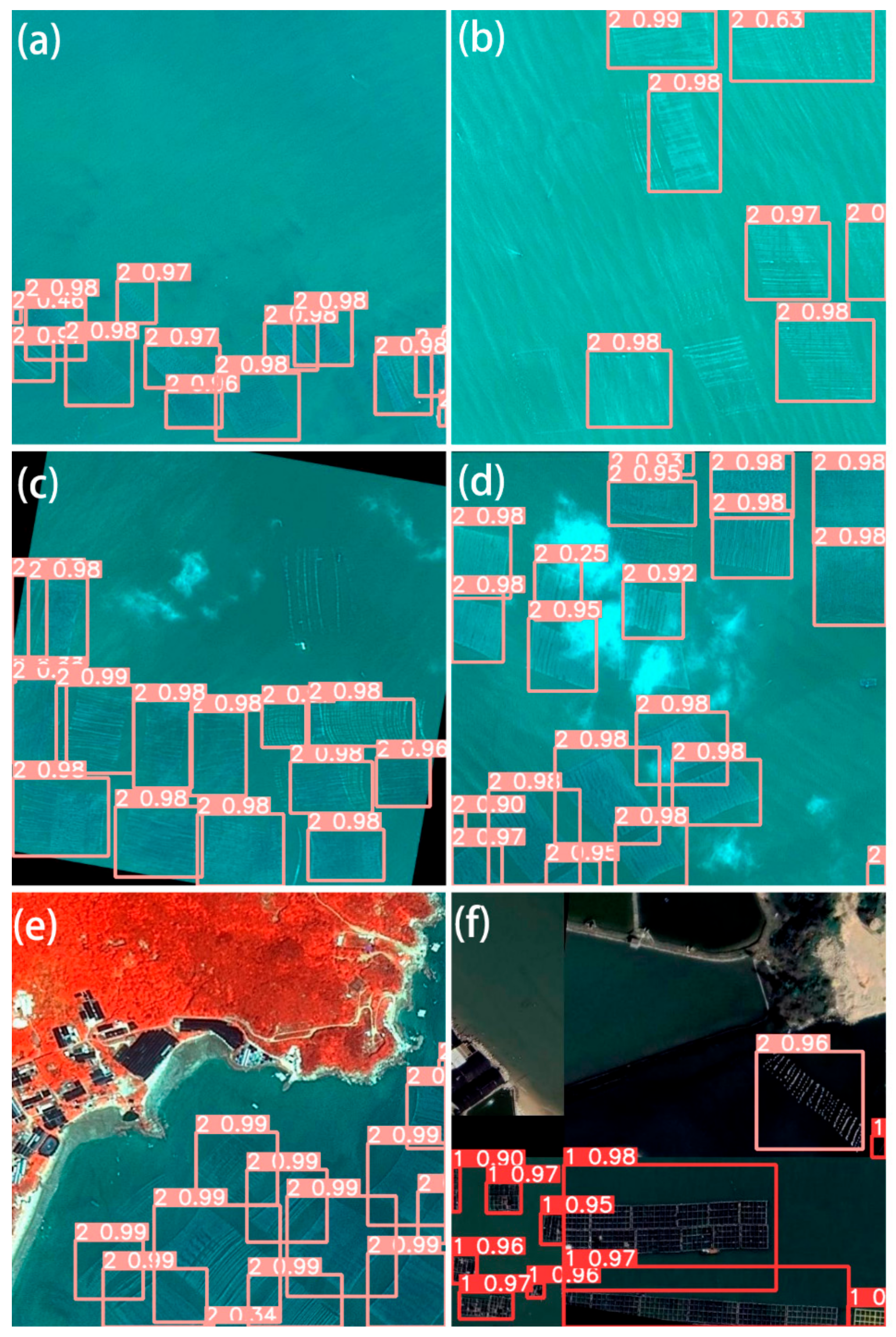
4.3. Object Detection Comparison
4.4. Adaptability of the Models and Data
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fu, Y.; Deng, J.; Wang, H.; Comber, A.; Yang, W.; Wu, W.; You, S.; Lin, Y.; Wang, K. A new satellite-derived dataset for marine aquaculture areas in China’s coastal region. Earth Syst. Sci. Data 2021, 13, 1829–1842. [Google Scholar] [CrossRef]
- Rishikeshan, C.; Ramesh, H. An automated mathematical morphology driven algorithm for water body extraction from remotely sensed images. ISPRS-J. Photogramm. Remote Sens. 2018, 146, 11–21. [Google Scholar] [CrossRef]
- Hou, T.; Sun, W.; Chen, C.; Yang, G.; Meng, X.; Peng, J. Marine floating raft aquaculture extraction of hyperspectral remote sensing images based decision tree algorithm. Int. J. Appl. Earth Obs. Geoinf. 2022, 111, 102846. [Google Scholar] [CrossRef]
- Cao, L.; Wang, W.; Yang, Y.; Yang, C.; Yuan, Z.; Xiong, S.; Diana, J. Environmental impact of aquaculture and countermeasures to aquaculture pollution in China. Environ. Sci. Pollut. Res. 2007, 14, 452–462. [Google Scholar]
- Chen, C.; He, X.; Liu, Z.; Sun, W.; Dong, H.; Chu, Y. Analysis of regional economic development based on land use and land cover change information derived from Landsat imagery. Sci. Rep. 2020, 10, 12721. [Google Scholar] [CrossRef] [PubMed]
- Kang, J.; Sui, L.; Yang, X.; Liu, Y.; Wang, Z.; Wang, J.; Yang, F.; Liu, B.; Ma, Y. Sea surface-visible aquaculture spatial-temporal distribution remote sensing: A case study in Liaoning province, China from 2000 to 2018. Sustainability 2019, 11, 7186. [Google Scholar] [CrossRef]
- Cui, Y.; Zhang, X.; Jiang, N.; Dong, T.; Xie, T. Remote sensing identification of marine floating raft aquaculture area based on sentinel-2A and DEM data. Front. Mar. Sci. 2022, 9, 955858. [Google Scholar] [CrossRef]
- Zhou, W.; Wang, F.; Wang, X.; Tang, F.; Li, J. Evaluation of multi-source high-resolution remote sensing image fusion in aquaculture areas. Appl. Sci. 2022, 12, 1170. [Google Scholar] [CrossRef]
- Wen, Q.; Zhang, Z.; Xu, J.; Zuo, L.; Wang, X.; Liu, B.; Zhao, X.; Yi, L. Spatial and temporal change of wetlands in Bohai rim during 2000–2008: An analysis based on satellite images. J. Remote Sens. 2011, 15, 183–200. (In Chinese) [Google Scholar]
- Mialhe, F.; Gunnell, Y.; Mering, C. The impacts of shrimp farming on land use, employment and migration in Tumbes, northern Peru. Ocean Coast. Manag. 2013, 73, 1–12. [Google Scholar] [CrossRef]
- Tenório, G.S.; Souza-Filho, P.W.M.; Ramos, E.M.; Alves, P.J.O. Mangrove shrimp farm mapping and productivity on the Brazilian Amazon coast: Environmental and economic reasons for coastal conservation. Ocean Coast. Manag. 2015, 104, 65–77. [Google Scholar] [CrossRef]
- Rather, M.A.; Ahmad, I.; Shah, A.; Hajam, Y.A.; Amin, A.; Khursheed, S.; Ahmad, I.; Rasool, S. Exploring opportunities of Artificial Intelligence in aquaculture to meet increasing food demand. Food Chem. X 2024, 22, 101309. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Wang, Z.; Yang, X.; Zhang, Y.; Yang, F.; Liu, B.; Cai, P. Satellite-based monitoring and statistics for raft and cage aquaculture in China’s offshore waters. Int. J. Appl. Earth Obs. Geoinf. 2020, 91, 102118. [Google Scholar] [CrossRef]
- Zhou, C.; Wong, K.; Tsou, J.Y.; Zhang, Y. Detection and Statistics of Offshore Aquaculture Rafts in Coastal Waters. J. Mar. Sci. Eng. 2022, 10, 781. [Google Scholar] [CrossRef]
- Maxwell, A.E.; Warner, T.A.; Fang, F. Implementation of machine-learning classification in remote sensing: An applied review. Int. J. Remote Sens. 2018, 39, 2784–2817. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, X.; Liu, Y.; Lu, C. Extraction of coastal raft cultivation area with heterogeneous water background by thresholding object-based visually salient NDVI from high spatial resolution imagery. Remote Sens. Lett. 2018, 9, 839–846. [Google Scholar] [CrossRef]
- Wang, S.; Huang, C.; Li, H.; Liu, Q. Synergistic Integration of Time Series Optical and SAR Satellite Data for Mariculture Extraction. Remote Sens. 2023, 15, 2243. [Google Scholar] [CrossRef]
- Wang, M.; Cui, Q.; Wang, J.; Ming, D.; Lv, G. Raft cultivation area extraction from high resolution remote sensing imagery by fusing multi-scale region-line primitive association features. ISPRS-J. Photogramm. Remote Sens. 2017, 123, 104–113. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Wan, J.; Xi, Y.; Jiang, W.; Wang, M.; Kang, M. Extraction and Classification of the Supervised Coastal Objects Based on HSRIs and a Novel Lightweight Fully Connected Spatial Dropout Network. Wirel. Commun. Mob. Comput. 2022, 2022, 2054877. [Google Scholar] [CrossRef]
- Blaschke, T.; Hay, G.J.; Kelly, M.; Lang, S.; Hofmann, P.; Addink, E.; Feitosa, R.Q.; Van der Meer, F.; Van der Werff, H.; Van Coillie, F. Geographic object-based image analysis–towards a new paradigm. ISPRS-J. Photogramm. Remote Sens. 2014, 87, 180–191. [Google Scholar] [CrossRef] [PubMed]
- Chen, G.; Weng, Q.; Hay, G.J.; He, Y. Geographic object-based image analysis (GEOBIA): Emerging trends and future opportunities. GISci. Remote Sens. 2018, 55, 159–182. [Google Scholar] [CrossRef]
- Chen, J.; Lu, Y.; Yu, Q.T. Transformers make strong encoders for medical image segmentation. arXiv 2021, arXiv:2102.04306. [Google Scholar]
- Chen, Y.; He, G.; Yin, R.; Zheng, K.; Wang, G. Comparative study of marine ranching recognition in multi-temporal high-resolution remote sensing images based on DeepLab-v3+ and U-Net. Remote Sens. 2022, 14, 5654. [Google Scholar] [CrossRef]
- Deng, J.; Bai, Y.; Chen, Z.; Shen, T.; Li, C.; Yang, X. A Convolutional Neural Network for Coastal Aquaculture Extraction from High-Resolution Remote Sensing Imagery. Sustainability 2023, 15, 5332. [Google Scholar] [CrossRef]
- Pham, M.-T.; Courtrai, L.; Friguet, C.; Lefèvre, S.; Baussard, A. YOLO-Fine: One-stage detector of small objects under various backgrounds in remote sensing images. Remote Sens. 2020, 12, 2501. [Google Scholar] [CrossRef]
- Qu, P.; Cheng, E.; Chen, K. Real-Time Ocean Small Target Detection Based on Improved YOLOX Network. In Proceedings of the OCEANS 2022, Hampton Roads, VA, USA, 17–20 October 2022; pp. 1–5. [Google Scholar]
- Wang, S.; Gao, S.; Zhou, L.; Liu, R.; Zhang, H.; Liu, J.; Jia, Y.; Qian, J. YOLO-SD: Small ship detection in SAR images by multi-scale convolution and feature transformer module. Remote Sens. 2022, 14, 5268. [Google Scholar] [CrossRef]
- Ge, R.; Mao, Y.; Li, S.; Wei, H. Research On Ship Small Target Detection In SAR Image Based On Improved YOLO-v7. In Proceedings of the 2023 International Applied Computational Electromagnetics Society Symposium (ACES-China), Hangzhou, China, 15–18 August 2023; pp. 1–3. [Google Scholar]
- Wang, L.; Chen, L.-Z.; Peng, B.; Lin, Y.-T. Improved YOLOv5 Algorithm for Real-Time Prediction of Fish Yield in All Cage Schools. J. Mar. Sci. Eng. 2024, 12, 195. [Google Scholar] [CrossRef]
- Liu, H.; Ma, X.; Yu, Y.; Wang, L.; Hao, L. Application of deep learning-based object detection techniques in fish aquaculture: A review. J. Mar. Sci. Eng. 2023, 11, 867. [Google Scholar] [CrossRef]
- Zhou, S.; Cai, K.; Feng, Y.; Tang, X.; Pang, H.; He, J.; Shi, X. An accurate detection model of takifugu rubripes using an improved yolo-v7 network. J. Mar. Sci. Eng. 2023, 11, 1051. [Google Scholar] [CrossRef]
- Shi, Y.; Li, S.; Liu, Z.; Zhou, Z.; Zhou, X. MTP-YOLO: You Only Look Once Based Maritime Tiny Person Detector for Emergency Rescue. J. Mar. Sci. Eng. 2024, 12, 669. [Google Scholar] [CrossRef]
- Fang, Z.; Wang, X.; Zhang, L.; Jiang, B. YOLO-RSA: A Multiscale Ship Detection Algorithm Based on Optical Remote Sensing Image. J. Mar. Sci. Eng. 2024, 12, 603. [Google Scholar] [CrossRef]
- Yang, Z.; Yin, Y.; Jing, Q.; Shao, Z. A High-Precision Detection Model of Small Objects in Maritime UAV Perspective Based on Improved YOLOv5. J. Mar. Sci. Eng. 2023, 11, 1680. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Hong, Z.; Yang, T.; Tong, X.; Zhang, Y.; Jiang, S.; Zhou, R.; Han, Y.; Wang, J.; Yang, S.; Liu, S. Multi-scale ship detection from SAR and optical imagery via a more accurate YOLOv3. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2021, 14, 6083–6101. [Google Scholar] [CrossRef]
- Hu, J.; Zhi, X.; Shi, T.; Zhang, W.; Cui, Y.; Zhao, S. PAG-YOLO: A portable attention-guided YOLO network for small ship detection. Remote Sens. 2021, 13, 3059. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, C.; Filaretov, V.F.; Yukhimets, D.A. Multi-scale ship detection algorithm based on YOLOv7 for complex scene SAR images. Remote Sens. 2023, 15, 2071. [Google Scholar] [CrossRef]
- Du, S.; Huang, H.; He, F.; Luo, H.; Yin, Y.; Li, X.; Xie, L.; Guo, R.; Tang, S. Unsupervised stepwise extraction of offshore aquaculture ponds using super-resolution hyperspectral images. Int. J. Appl. Earth Obs. 2023, 119, 103326. [Google Scholar] [CrossRef]
- Gu, Y.-G.; Lin, Q. Trace metals in a sediment core from the largest mariculture base of the eastern Guangdong coast, South China: Vertical distribution, speciation, and biological risk. Mar. Pollut. Bull. 2016, 113, 520–525. [Google Scholar] [CrossRef] [PubMed]
- Gu, Y.-G.; Gao, Y.-P.; Jiang, S.-J.; Jordan, R.W.; Yang, Y.-F. Ecotoxicological risk of antibiotics and their mixtures to aquatic biota with the DGT technique in sediments. Ecotoxicology 2023, 32, 536–543. [Google Scholar] [CrossRef] [PubMed]
- Gu, Y.-G.; Lin, Q.; Jiang, S.-J.; Wang, Z.-H. Metal pollution status in Zhelin Bay surface sediments inferred from a sequential extraction technique, South China Sea. Mar. Pollut. Bull. 2014, 81, 256–261. [Google Scholar] [CrossRef]
- Gu, Y.-G.; Ouyang, J.; Ning, J.-J.; Wang, Z.-H. Distribution and sources of organic carbon, nitrogen and their isotopes in surface sediments from the largest mariculture zone of the eastern Guangdong coast, South China. Mar. Pollut. Bull. 2017, 120, 286–291. [Google Scholar] [CrossRef]
- Gu, Y.-G.; Ke, C.-L.; Liu, Q. Characterization, sources, and ecological hazards of polycyclic aromatic hydrocarbons in the intertidal sediments of Zhelin Bay, the biggest mariculture area on the eastern Guangdong coast of China. Mar. Pollut. Bull. 2018, 130, 192–197. [Google Scholar] [CrossRef]
- Yue, L.; Shen, H.; Li, J.; Yuan, Q.; Zhang, H.; Zhang, L. Image super-resolution: The techniques, applications, and future. Signal Process. 2016, 128, 389–408. [Google Scholar] [CrossRef]
- Wang, X.; Yu, K.; Wu, S.; Gu, J.; Liu, Y.; Dong, C.; Qiao, Y.; Change Loy, C. Esrgan: Enhanced super-resolution generative adversarial networks. In Proceedings of the European Conference on Computer Vision (ECCV) Workshops, Munich, Germany, 8–14 September 2018; pp. 63–79. [Google Scholar]
- Wang, P.; Bayram, B.; Sertel, E. A comprehensive review on deep learning based remote sensing image super-resolution methods. Earth-Sci. Rev. 2022, 232, 104110. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, G.; Guo, S. Target detection method for low-resolution remote sensing image based on esrgan and redet. Photonics 2021, 8, 431. [Google Scholar] [CrossRef]
- Wang, X.; Xie, L.; Dong, C.; Shan, Y. Real-esrgan: Training real-world blind super-resolution with pure synthetic data. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 1905–1914. [Google Scholar]
- Real-ESRGAN. Available online: https://github.com/xinntao/Real-ESRGAN (accessed on 16 April 2024).
- Shorten, C.; Khoshgoftaar, T.M. A survey on image data augmentation for deep learning. J. Big Data 2019, 6, 60. [Google Scholar] [CrossRef]
- Tao, J.; Wang, H.; Zhang, X.; Li, X.; Yang, H. An object detection system based on YOLO in traffic scene. In Proceedings of the 2017 6th International Conference on Computer Science and Network Technology (ICCSNT), Dalian, China, 21–22 October 2017; pp. 315–319. [Google Scholar]
- Ma, R.; Zhang, R. Facial expression recognition method based on PSA—YOLO network. Front. Neurorobot. 2023, 16, 1057983. [Google Scholar] [CrossRef] [PubMed]
- Abdullah; Ali, S.; Khan, Z.; Hussain, A.; Athar, A.; Kim, H.-C. Computer vision based deep learning approach for the detection and classification of algae species using microscopic images. Water 2022, 14, 2219. [Google Scholar] [CrossRef]
- Durve, M.; Orsini, S.; Tiribocchi, A.; Montessori, A.; Tucny, J.-M.; Lauricella, M.; Camposeo, A.; Pisignano, D.; Succi, S. Benchmarking YOLOv5 and YOLOv7 models with DeepSORT for droplet tracking applications. Eur. Phys. J. E 2023, 46, 32. [Google Scholar] [CrossRef] [PubMed]
- Hussain, M. YOLO-v1 to YOLO-v8, the rise of YOLO and its complementary nature toward digital manufacturing and industrial defect detection. Machines 2023, 11, 677. [Google Scholar] [CrossRef]
- Wu, D.; Jiang, S.; Zhao, E.; Liu, Y.; Zhu, H.; Wang, W.; Wang, R. Detection of Camellia oleifera fruit in complex scenes by using YOLOv7 and data augmentation. Appl. Sci. 2022, 12, 11318. [Google Scholar] [CrossRef]
- Jocher, G.; Nishimura, K.; Mineeva, T.; Vilariño, R. YOLOv5 (2020). GitHub Repository. Available online: https://github.com/ultralytics/yolov5 (accessed on 1 December 2023).
- Jocher, G.; Chaurasia, A.; Stoken, A.; Borovec, J.; Kwon, Y.; Michael, K.; Fang, J.; Wong, C.; Yifu, Z.; Montes, D. ultralytics/yolov5: v6. 2-yolov5 classification models, apple m1, reproducibility, clearml and deci. ai integrations. Zenodo 2022. [Google Scholar] [CrossRef]
- YOLOv7. Available online: https://github.com/WongKinYiu/yolov7 (accessed on 16 April 2024).
- Kee, E.; Chong, J.J.; Choong, Z.J.; Lau, M. A comparative analysis of cross-validation techniques for a smart and lean pick-and-place solution with deep learning. Electronics 2023, 12, 2371. [Google Scholar] [CrossRef]
- Arani, E.; Gowda, S.; Mukherjee, R.; Magdy, O.; Kathiresan, S.; Zonooz, B. A comprehensive study of real-time object detection networks across multiple domains: A survey. arXiv 2022, arXiv:2208.10895. [Google Scholar]
- Olorunshola, O.E.; Irhebhude, M.E.; Evwiekpaefe, A.E. A comparative study of YOLOv5 and YOLOv7 object detection algorithms. J. Comput. Soc. Inf. 2023, 2, 1–12. [Google Scholar] [CrossRef]
- Salman, S.; Liu, X. Overfitting mechanism and avoidance in deep neural networks. arXiv 2019, arXiv:1901.06566. [Google Scholar]
- Ying, X. An overview of overfitting and its solutions. J. Phys. Conf. Ser. 2019, 1168, 022022. [Google Scholar]
- Bejani, M.M.; Ghatee, M. A systematic review on overfitting control in shallow and deep neural networks. Artif. Intell. Rev. 2021, 54, 6391–6438. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Platform | Sensor | Band Number | Spectral Range/μm | Spatial Resolution/m | Platform | Sensor | Band Number | Spectral Range/μm | Spatial Resolution/m |
|---|---|---|---|---|---|---|---|---|---|
| - | 0.45–0.90 | 2 | ZY3-02 | Front camera | - | 0.50–0.80 | 2.5 | ||
| Gaofen-1B | PAN * MS * | 1 | 0.45–0.52 | 8 | Rear camera | - | 0.50–0.80 | 2.5 | |
| 2 | 0.52–0.59 | Nadir camera | - | 0.50–0.80 | 2.1 | ||||
| 3 | 0.63–0.69 | MS | 1 | 0.45–0.52 | 5.8 | ||||
| 4 | 0.77–0.89 | 2 | 0.52–0.59 | ||||||
| Gaofen-6 | PAN | - | 0.45–0.90 | 2 | 3 | 0.63–0.69 | |||
| MS | 1 | 0.45–0.52 | 8 | 4 | 0.77–0.89 | ||||
| 2 | 0.52–0.60 | ||||||||
| 3 | 0.63–0.69 | ||||||||
| 4 | 0.76–0.90 |
| Project | Model/Parameter |
|---|---|
| CPU | Intel Core 2 Duo T7700 |
| RAM | 32 GB |
| GPU | NVIDIA GRID RTX8000-48Q |
| System | Windows 10 |
| Code | Python3.7 |
| Framework | CUDA11.0/cudnn8.0.1/torch 1.7.1 |
| Experiment ID | Model | Data Set | Precision (%) | Recall (%) | F1 Score | mAP_0.5 (%) | Frames per Second (FPS) |
|---|---|---|---|---|---|---|---|
| 1 | YOLOv5 | Satellite | 95.33 | 93.02 | 94.16 | 96.22 | 32.89 |
| 2 | YOLOv7 | Satellite | 92.04 | 90.99 | 91.51 | 94.19 | 32.05 |
| 3 | YOLOv5 | Google Earth | 96.67 | 95.91 | 96.29 | 98.2 | 33.22 |
| 4 | YOLOv7 | Google Earth | 96.27 | 95.81 | 96.04 | 98.16 | 33.33 |
| 5 | YOLOv5 | Satellite (SR) * | 86.2 | 80.28 | 83.13 | 85.5 | 33.22 |
| 6 | YOLOv7 | Satellite (SR) * | 75.84 | 79.31 | 77.54 | 81.33 | 32.36 |
| Data Set | Model | Precision | Recall | F1 Score | mAP_0.5 | Frame per Second |
|---|---|---|---|---|---|---|
| Google Earth | YOLOv5 vs. YOLOv7 | 0.30 | 0.68 | 0.089 | 0.52 | 0.71 |
| Satellite | YOLOv5 vs. YOLOv7 | * 0.021 | * 0.024 | * 0.0025 | * 6.49 × 10−5 | 0.13 |
| Satellite (SR) | YOLOv5 vs. YOLOv7 | * 2.42 × 10−5 | 0.33 | * 1.16 × 10−7 | * 3.53 × 10−4 | 0.58 |
| Model | Data Set | Precision | Recall | F1 Score | mAP_0.5 | Frame per Second |
|---|---|---|---|---|---|---|
| YOLOv5 | Google Earth vs. Satellite | 0.27 | * 0.0039 | * 0.027 | * 9.16 × 10−4 | 0.11 |
| Satellite vs. Satellite (SR) | * 5.72 × 10−5 | * 1.83 × 10−6 | * 6.87 × 10−7 | * 1.78 × 10−7 | * 0.0096 | |
| YOLOv7 | Google Earth vs. Satellite | * 2.60 × 10−5 | * 4.72 × 10−4 | * 1.26 × 10−5 | * 6.96 × 10−5 | 0.032 |
| Satellite vs. Satellite (SR) | * 1.07 × 10−5 | * 5.28 × 10−6 | * 1.81 × 10−7 | * 1.63 × 10−6 | 0.78 |
| Model | Data Set | Average Confidence |
|---|---|---|
| YOLOv5 | Satellite | 0.90 |
| YOLOv7 | Satellite | 0.86 |
| YOLOv5 | Google Earth | 0.85 |
| YOLOv7 | Google Earth | 0.81 |
| Conf_thres | YOLOv5 + Satellite | YOLOv7 + Satellite | YOLOv5 + Google Earth | YOLOV7 + Google Earth |
|---|---|---|---|---|
| 0.3 | 0.91 | 0.87 | 0.87 | 0.83 |
| 0.4 | 0.92 | 0.88 | 0.89 | 0.85 |
| 0.5 | 0.92 | 0.89 | 0.90 | 0.87 |
| 0.6 | 0.93 | 0.90 | 0.91 | 0.89 |
| 0.7 | 0.93 | 0.91 | 0.93 | 0.91 |
| 0.8 | 0.94 | 0.93 | 0.94 | 0.92 |
| 0.9 | 0.96 | 0.95 | 0.96 | 0.95 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, D.; Shi, Q.; Hao, P.; Huang, H.; Yang, J.; Guo, B.; Gao, Q. Intelligent Detection of Marine Offshore Aquaculture with High-Resolution Optical Remote Sensing Images. J. Mar. Sci. Eng. 2024, 12, 1012. https://doi.org/10.3390/jmse12061012
Dong D, Shi Q, Hao P, Huang H, Yang J, Guo B, Gao Q. Intelligent Detection of Marine Offshore Aquaculture with High-Resolution Optical Remote Sensing Images. Journal of Marine Science and Engineering. 2024; 12(6):1012. https://doi.org/10.3390/jmse12061012
Chicago/Turabian StyleDong, Di, Qingxiang Shi, Pengcheng Hao, Huamei Huang, Jia Yang, Bingxin Guo, and Qing Gao. 2024. "Intelligent Detection of Marine Offshore Aquaculture with High-Resolution Optical Remote Sensing Images" Journal of Marine Science and Engineering 12, no. 6: 1012. https://doi.org/10.3390/jmse12061012
APA StyleDong, D., Shi, Q., Hao, P., Huang, H., Yang, J., Guo, B., & Gao, Q. (2024). Intelligent Detection of Marine Offshore Aquaculture with High-Resolution Optical Remote Sensing Images. Journal of Marine Science and Engineering, 12(6), 1012. https://doi.org/10.3390/jmse12061012