

Dynamic Analysis of a Barge-Type Floating Wind Turbine Subjected to Failure of the Mooring System

 ,
, 
Abstract
1. Introduction
2. Theoretical Background
2.1. Frequency-Domain Analysis of Barge-Type FOWT
2.2. Time-Domain Model Based on Cummins Equation
3. Numerical Simulation
3.1. Simulation Model
3.2. Wave Environment Condition
3.3. ANSYS-AQWA Setup
4. Results and Discussions
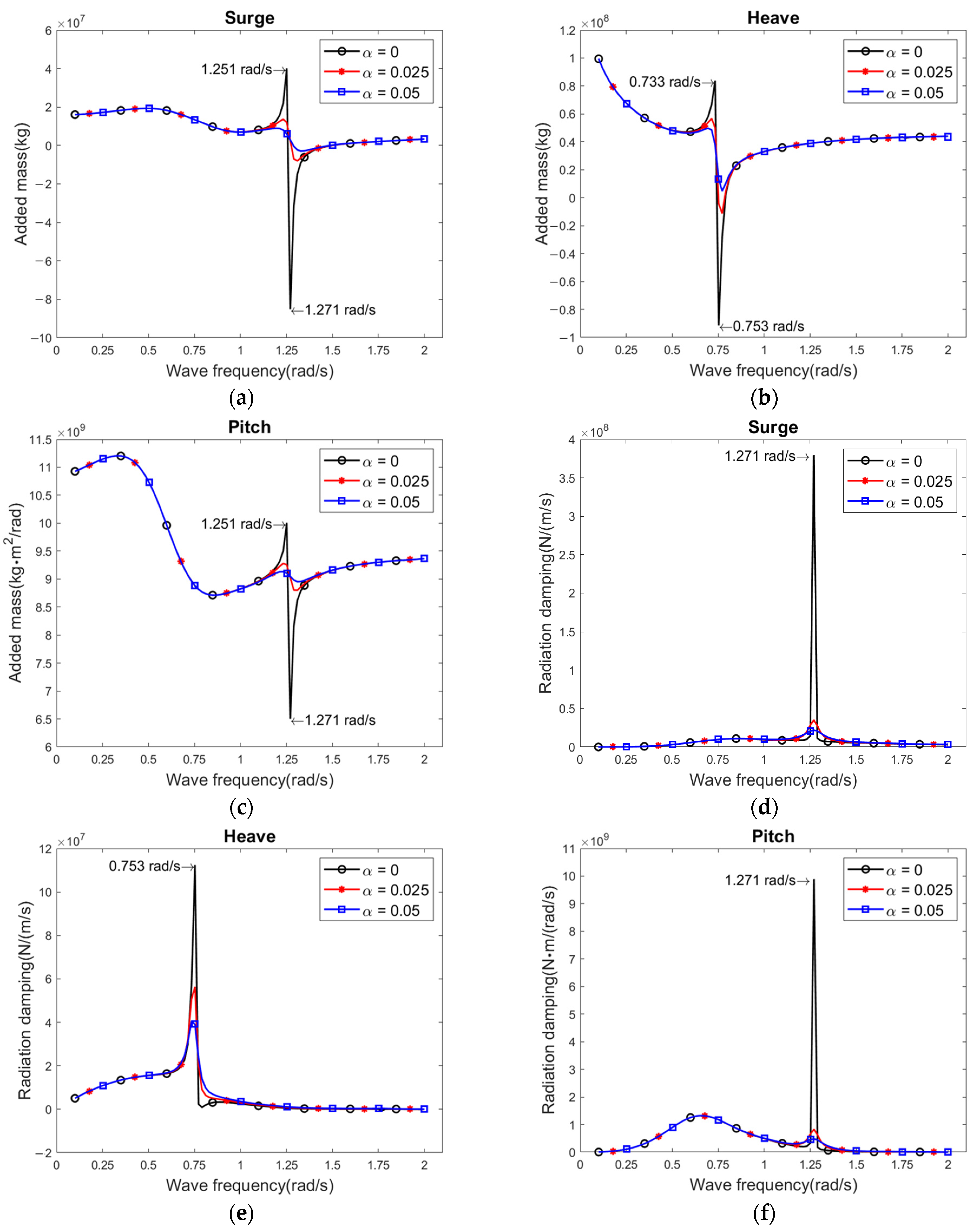
4.1. Hydrodynamics of the Barge-Type Floating Wind Turbine
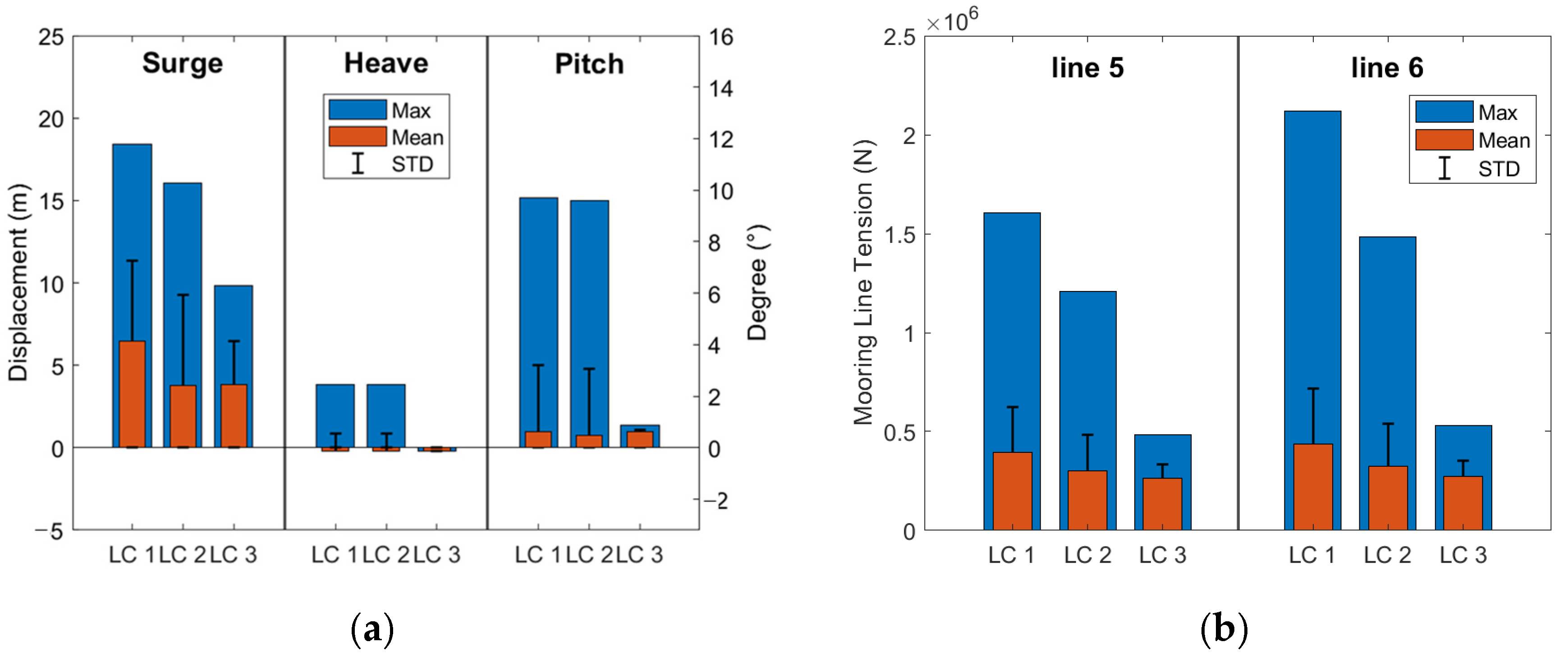
4.2. Barge-Type FOWT Motion and Mooring Tension Dynamic Responses under Operating Condition
4.3. Barge-Type FOWT Motion and Mooring Tension Dynamic Responses under Extreme Condition
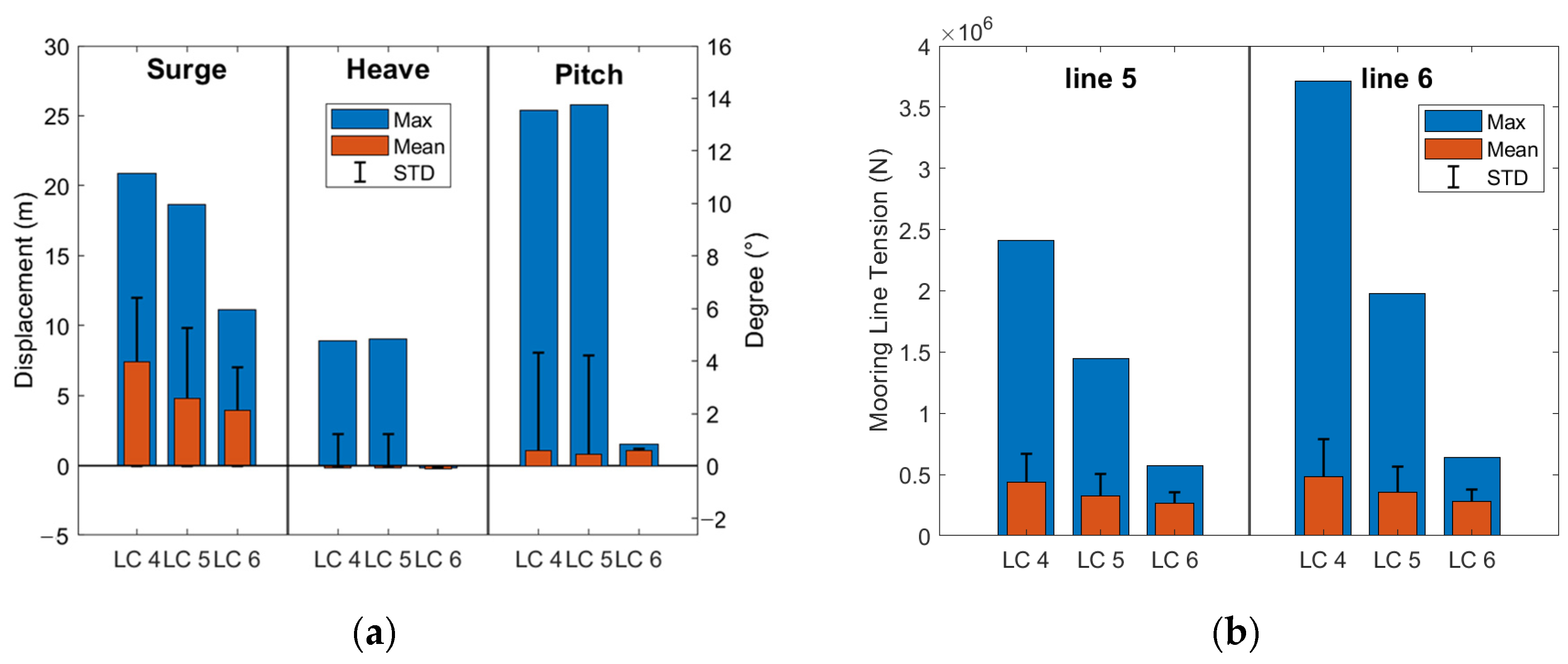
4.3.1. All Intact
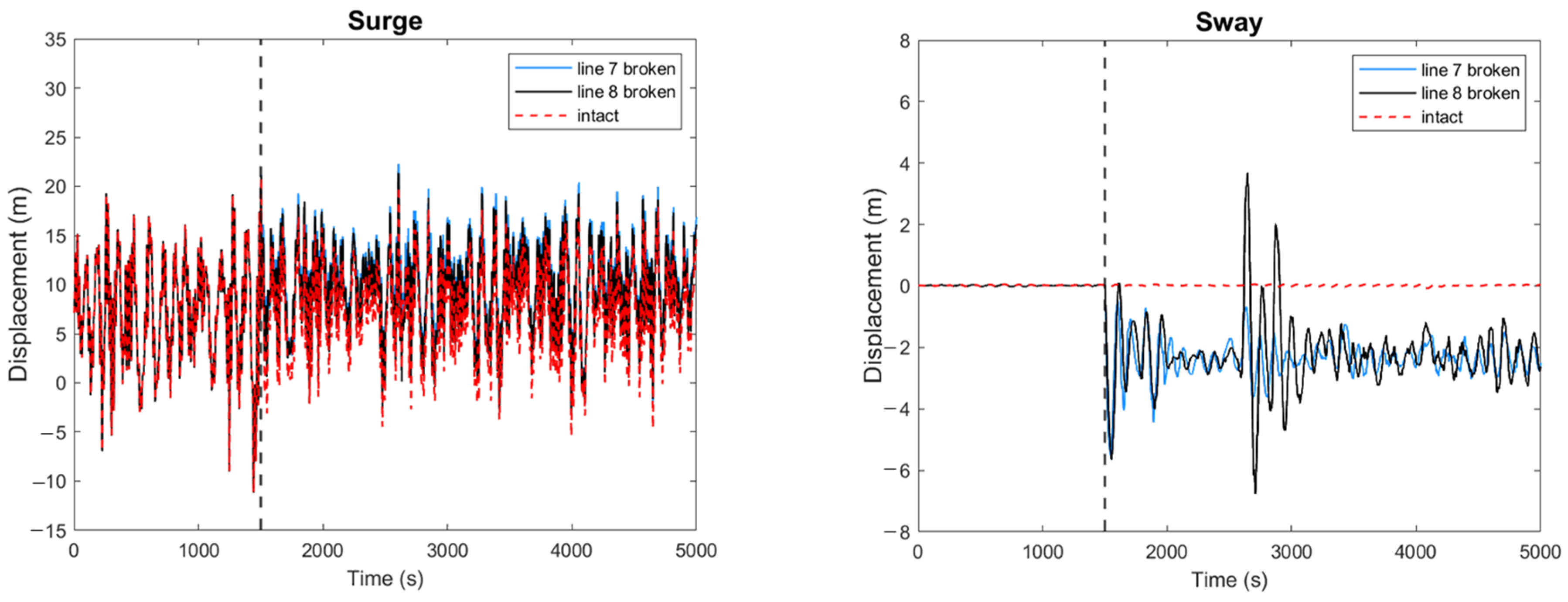
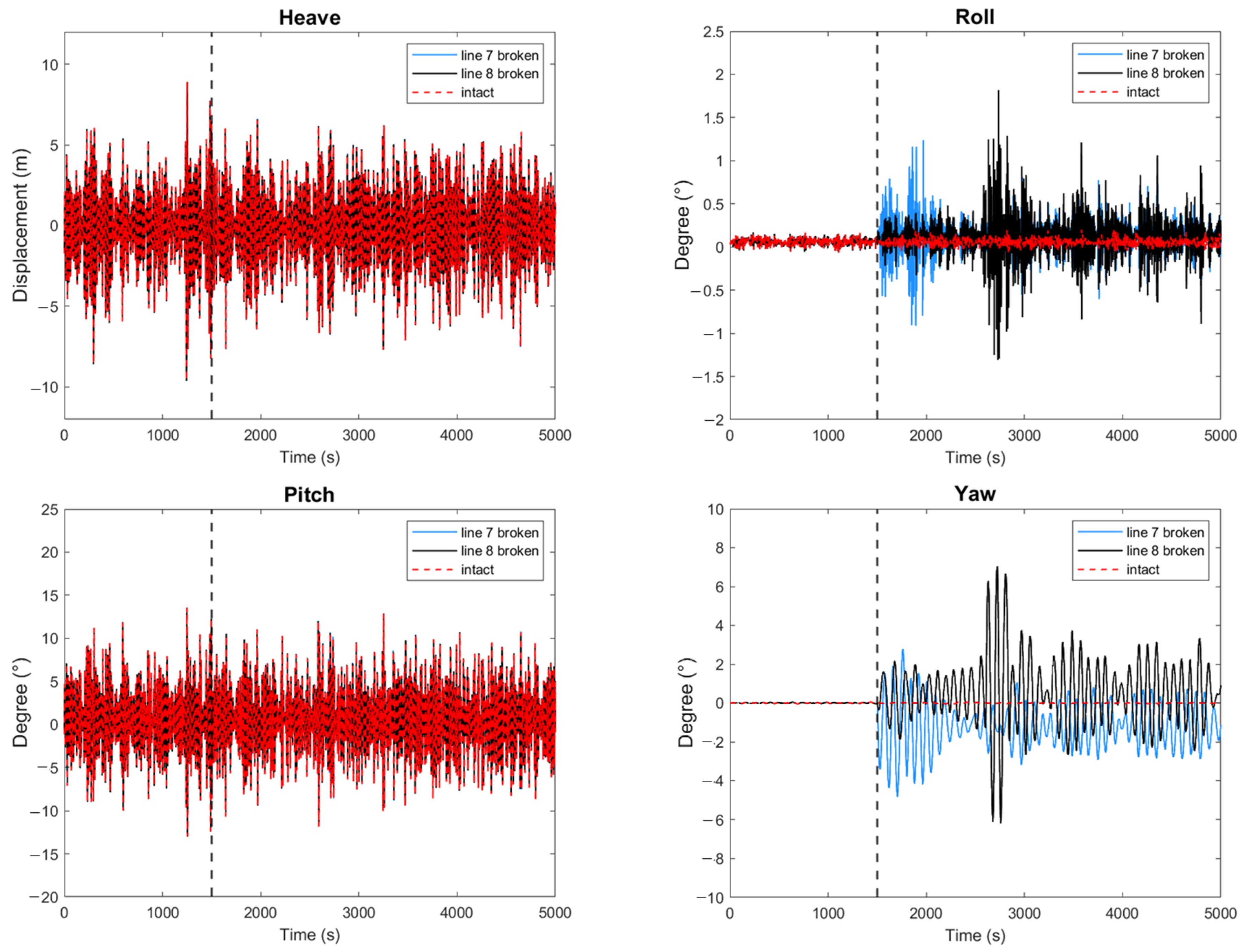
4.3.2. One Line Broken
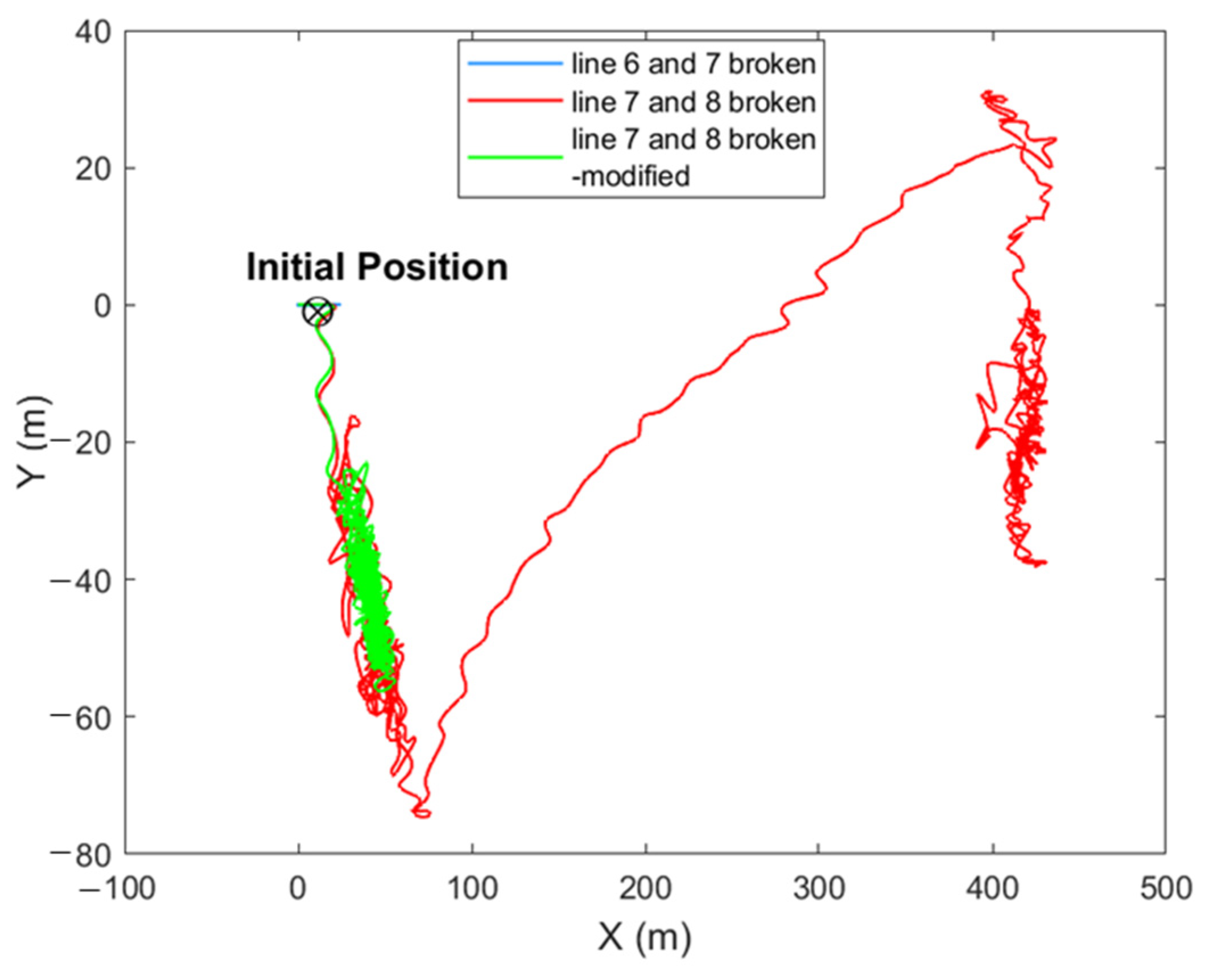
4.3.3. Double Lines Broken
5. Conclusions
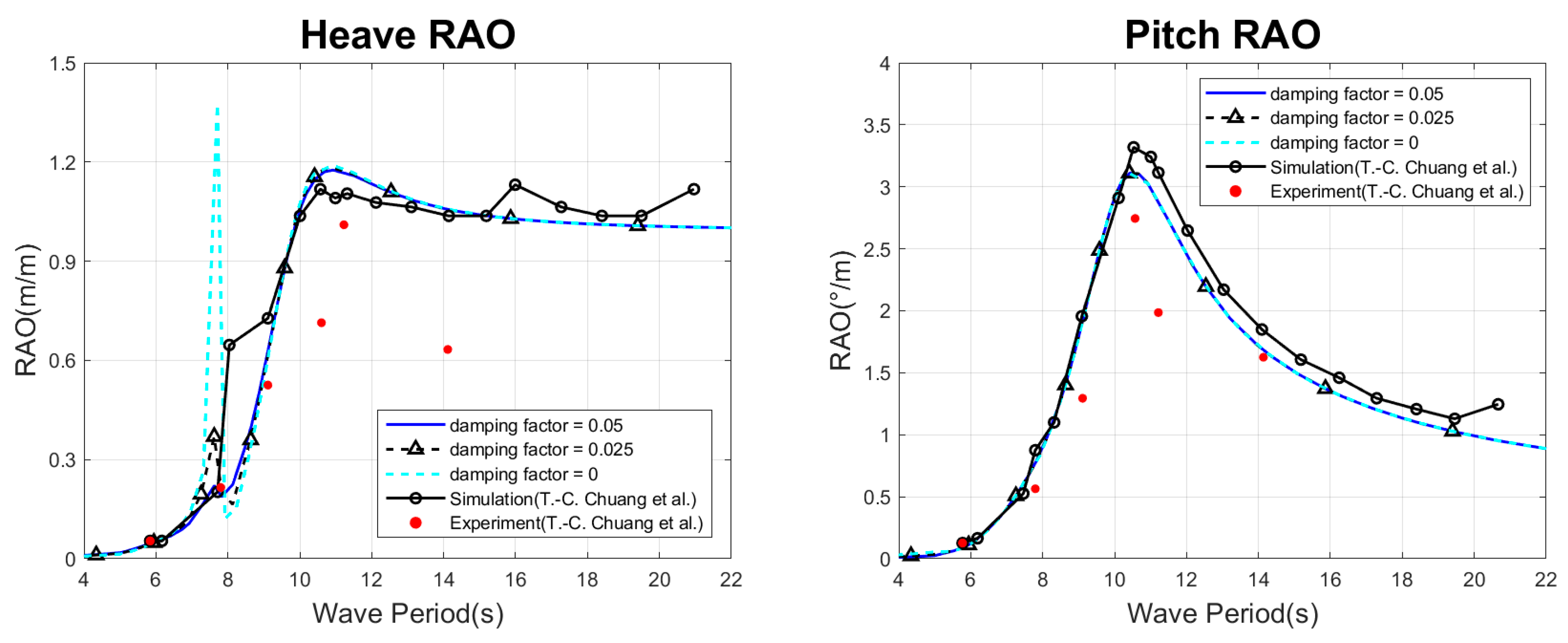
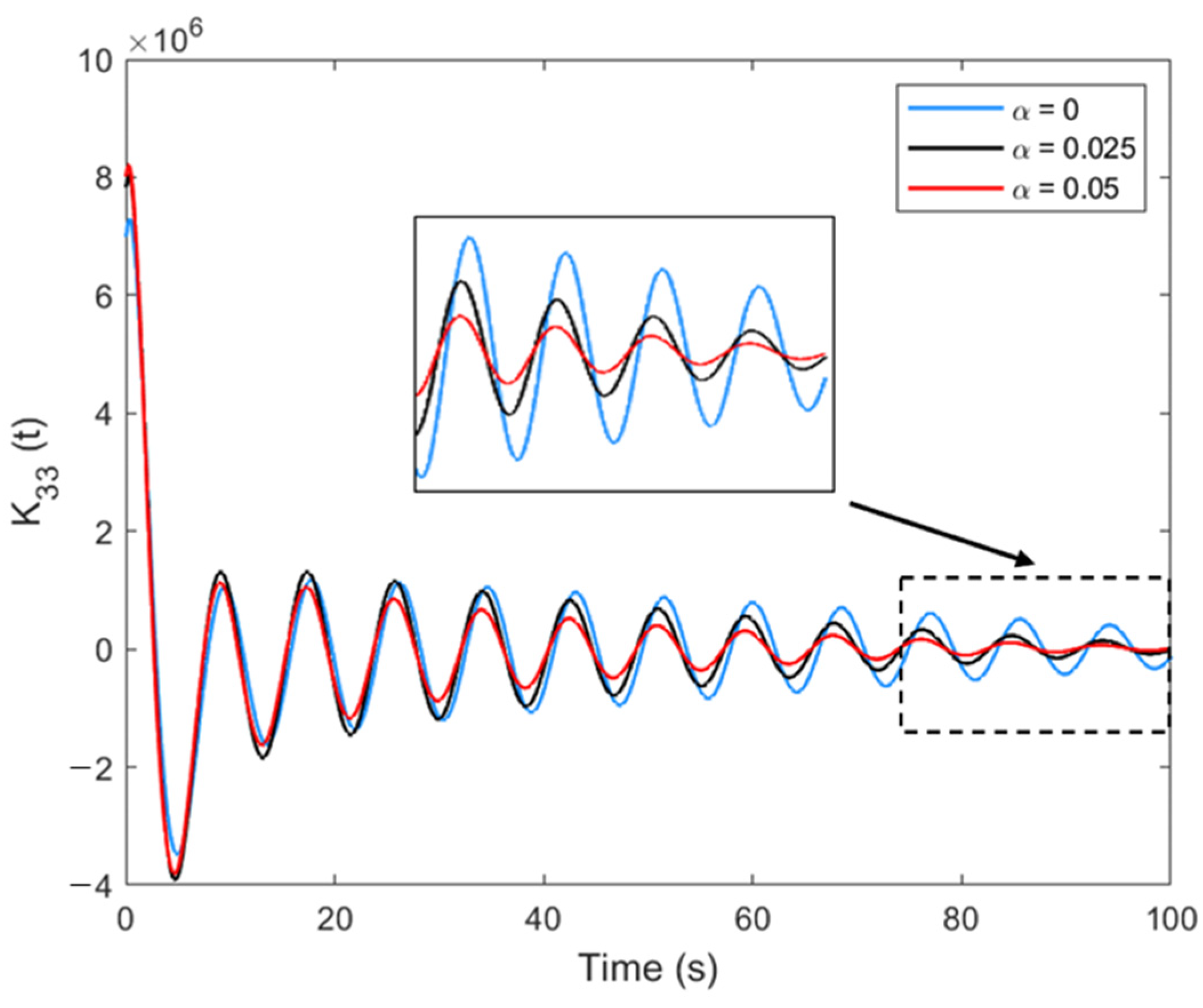
- Because of the lack of viscosity, the wave elevation at the free water surface in the moonpool and the heave RAO of the barge-type FOWT are overestimated at the resonance frequency, and their effects can be effectively corrected by using the damping lid method in AQWA. In addition, the damping lid method can effectively reduce the oscillation amplitude of the impulse response function K33(t), and the longer the time, the greater the reduction amplitude, thus shortening the decay time. In this study, when the damping factor is taken as 0.05, the heave and pitch RAOs obtained from the simulation are in good agreement with the previous experimental results, and the overestimation of wave elevation can be suitably suppressed, and at the same time, K33(t) is allowed to almost decay to 0 at 100 s, which may be beneficial for the accuracy of the time-domain calculation results.
- After one of the upwind mooring-line breaks, the mooring system still maintains good positioning capabilities. The failure has almost no impact on the heave- and pitch-mode motions. The sway and yaw motions increase to 5.64 m and 4.82° after failure, and the other modal motions increase marginally. Line 8 breakage has a greater effect on motions and mooring tensions than line 7 breakage. After the failure of line 8, the maximum tension of the adjacent mooring line increases by 2.91 times compared to the intact condition, which is 58.9% of the minimum breaking strength.
- The simultaneous breakage of line 6 and line 7 has a small effect on the motions but significantly increases the maximum tension of the remaining upwind mooring lines by a factor of 3.9 relative to the intact condition, reaching 51.2% of the minimum breaking strength. The simultaneous breakage of line 7 and line 8, mooring lines located at one corner, has a significant impact on the surge, sway, roll, and yaw modes, with the surge drift reaching a maximum of 436.7 m. It also leads to a cascading failure phenomenon in the mooring system, which may be avoided by appropriately increasing the diameter and grade of the mooring chain.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Global Wind Report 2023. Available online: https://gwec.net/globalwindreport2023/ (accessed on 5 October 2023).
- Hong, L.; Möller, B. Offshore wind energy potential in China: Under technical, spatial and economic constraints. Energy 2011, 36, 4482–4491. [Google Scholar] [CrossRef]
- Chen, M.; Jiang, J.; Zhang, W.; Li, C.B.; Zhou, H.; Jiang, Y.; Sun, X. Study on Mooring Design of 15 MW Floating Wind Turbines in South China Sea. J. Mar. Sci. Eng. 2024, 12, 33. [Google Scholar] [CrossRef]
- Da, Z.; Xiliang, Z.; Jiankun, H.; Qimin, C. Offshore wind energy development in China: Current status and future perspective. Renew. Sustain. Energy Rev. 2011, 15, 4673–4684. [Google Scholar] [CrossRef]
- Chen, M.; Deng, J.; Yang, Y.; Zhou, H.; Tao, T.; Liu, S.; Sun, L.; Hua, L. Performance Analysis of a Floating Wind–Wave Power Generation Platform Based on the Frequency Domain Model. J. Mar. Sci. Eng. 2024, 12, 206. [Google Scholar] [CrossRef]
- Jonkman, J.M.; Matha, D. Dynamics of offshore floating wind turbines—Analysis of three concepts. Wind. Energy 2011, 14, 557–569. [Google Scholar] [CrossRef]
- Jonkman, J.M. Loads Analysis of a Floating Offshore Wind Turbine Using Fully Coupled Simulation; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2007. [Google Scholar]
- Molin, B. On the piston and sloshing modes in moonpools. J. Fluid Mech. 2001, 430, 27–50. [Google Scholar] [CrossRef]
- Newman, J.N. Wave effects on multiple bodies. Hydrodyn. Ship Ocean Eng. 2001, 3, 3–26. [Google Scholar]
- Molin, B.; Zhang, X.; Huang, H.; Remy, F. On natural modes in moonpools and gaps in finite depth. J. Fluid Mech. 2018, 840, 530–554. [Google Scholar] [CrossRef]
- Moradi, N.; Zhou, T.; Cheng, L. Effect of inlet configuration on wave resonance in the narrow gap of two fixed bodies in close proximity. Ocean Eng. 2015, 103, 88–102. [Google Scholar] [CrossRef]
- Chen, M.; Zou, M.; Zhu, L.; Ouyang, M.; Liang, Q.; Zhao, W. A fully coupled time domain model capturing nonlinear dynamics of float-over deck installation. Ocean Eng. 2024, 293, 116721. [Google Scholar] [CrossRef]
- Zhao, W.; Pan, Z.; Lin, F.; Li, B.; Taylor, P.H.; Efthymiou, M. Estimation of gap resonance relevant to side-by-side offloading. Ocean Eng. 2018, 153, 1–9. [Google Scholar] [CrossRef]
- Zou, M.; Chen, M.; Zhu, L.; Yun, Q.; Zhao, W.; Liang, Q.; Zhao, Y. Experimental and numerical investigation of gap resonances between side-by-side fixed barges under beam sea excitation. Ocean Eng. 2024, 297, 117150. [Google Scholar] [CrossRef]
- Malta, E.B.; Ruggeri, F.; Cardozo de Mello, P.; Vilameá, E.M.; de Oliveira, A.C.; Nishimoto, K. Semi-Submersible Hub Platform with an Internal Dock Model Testing. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014; p. V01BT01A037. [Google Scholar]
- Chen, X.-B. Hydrodynamic analysis for offshore LNG terminals. In Proceedings of the 2nd International Workshop on Applied Offshore Hydrodynamics, Rio de Janeiro, Brazil, 14–15 April 2005. [Google Scholar]
- Taylor Eatock, R. Gap resonances in focused wave groups. In Proceedings of the 23rd International Workshop on Water Waves and Floating Bodies, Jeju, Republic of Korea, 13–16 April 2008. [Google Scholar]
- Huijsmans, R.; Pinkster, J.; De Wilde, J. Diffraction and radiation of waves around side-by-side moored vessels. In Proceedings of the ISOPE International Ocean and Polar Engineering Conference, Kitakyushu, Japan, 25–31 May 2001; p. ISOPE–I-01-061. [Google Scholar]
- Newman, J. Progress in wave load computations on offshore structures. In Proceedings of the 23rd OMAE Conference, Vancouver, BC, Canada, 20–25 June 2004. [Google Scholar]
- Ansys, A. AQWA Theory Manual; AQWA: Canonsburg, PA, USA, 2023. [Google Scholar]
- WAMIT. User Manual (v73). Available online: https://www.wamit.com/manualupdate/v73_manual.pdf (accessed on 21 March 2024).
- DNV. Wadam—Wave Analysis by Diffraction and Morison Theory; SESAM User Manual: Oslo, Norway, 2014. [Google Scholar]
- Trubat, P.; Molins, C.; Alarcon, D.; Arramounet, V.; Mahfouz, M.Y. Mooring fatigue verification of the WindCrete for a 15 MW wind turbine. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Online, 5–6 April 2021; p. V001T001A017. [Google Scholar]
- Yang, C.K.; Kim, M. The structural safety assessment of a tie-down system on a tension leg platform during hurricane events. Ocean Syst. Eng. 2011, 1, 263–283. [Google Scholar] [CrossRef]
- Bae, Y.H.; Kim, M.H.; Kim, H.C. Performance changes of a floating offshore wind turbine with broken mooring line. Renew. Energy 2017, 101, 364–375. [Google Scholar] [CrossRef]
- Prislin, I.; Maroju, S. Mooring integrity and machine learning. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–4 May 2017; p. D031S034R007. [Google Scholar]
- Chen, M.; Chen, Y.; Li, T.; Tang, Y.; Ye, J.; Zhou, H.; Ouyang, M.; Zhang, X.; Shi, W.; Sun, X. Analysis of the wet-towing operation of a semi-submersible floating wind turbine using a single tugboat. Ocean Eng. 2024, 299, 117354. [Google Scholar] [CrossRef]
- Yang, C.K.; Padmanabhan, B.; Murray, J.; Kim, M. The transient effect of tendon disconnection on the global motion of ETLP. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Estoril, Portugal, 15–20 June 2008; pp. 497–507. [Google Scholar]
- Yu, J.; Hao, S.; Yu, Y.; Chen, B.; Cheng, S.; Wu, J. Mooring analysis for a whole TLP with TTRs under tendon one-time failure and progressive failure. Ocean Eng. 2019, 182, 360–385. [Google Scholar] [CrossRef]
- Han, J.S.; Son, Y.-J.; Choi, H.S.; Rho, J.B. The transient behavior of mooring systems in line-broken condition. In Proceedings of the ISOPE International Ocean and Polar Engineering Conference, Maui, HI, USA, 19–24 June 2011; p. ISOPE–I-11-434. [Google Scholar]
- Le, C.; Li, Y.; Ding, H. Study on the coupled dynamic responses of a submerged floating wind turbine under different mooring conditions. Energies 2019, 12, 418. [Google Scholar] [CrossRef]
- Ren, Y.; Venugopal, V.; Shi, W. Dynamic analysis of a multi-column TLP floating offshore wind turbine with tendon failure scenarios. Ocean Eng. 2022, 245, 110472. [Google Scholar] [CrossRef]
- Ren, Y.; Shi, W.; Venugopal, V.; Zhang, L.; Li, X. Experimental study of tendon failure analysis for a TLP floating offshore wind turbine. Appl. Energy 2024, 358, 122633. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, S.; Xie, S.; He, J.; Gao, J.; Tian, C. Effects of mooring line failure on the dynamic responses of a semisubmersible floating offshore wind turbine including gearbox dynamics analysis. Ocean Eng. 2022, 245, 110478. [Google Scholar] [CrossRef]
- Zhang, X.; He, L.; Ma, G.; Ma, Q. Mechanism of mooring line breakage and shutdown opportunity analysis of a semi-submersible offshore wind turbine in extreme operating gust. Ocean Eng. 2023, 268, 113399. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, Q.; Liu, L.; Tang, Y. Transient response of a SPAR-type floating offshore wind turbine with fractured mooring lines. Renew. Energy 2018, 122, 576–588. [Google Scholar] [CrossRef]
- Wu, H.; Zhao, Y.; He, Y.; Shao, Y.; Mao, W.; Han, Z.; Huang, C.; Gu, X.; Jiang, Z. Transient response of a TLP-type floating offshore wind turbine under tendon failure conditions. Ocean Eng. 2021, 220, 108486. [Google Scholar] [CrossRef]
- Zhou, Y.; Feng, S.; Guo, X.; Tian, F.; Han, X.; Shi, W.; Li, X. Initial Design of a Novel Barge-Type Floating Offshore Wind Turbine in Shallow Water. J. Mar. Sci. Eng. 2023, 11, 464. [Google Scholar] [CrossRef]
- Yang, Y.; Bashir, M.; Li, C.; Wang, J. Investigation on mooring breakage effects of a 5 MW barge-type floating offshore wind turbine using F2A. Ocean Eng. 2021, 233, 108887. [Google Scholar] [CrossRef]
- DNVGL. DNVGL-RP-0286 Coupled Analysis of Floating Wind Turbines; DNVGL: Bærum, Norway, 2019. [Google Scholar]
- Jia, W.; Yue, M.; Miao, W.; Yang, Y.; Li, C. Dynamic analysis of a 5 MW Barge-type FOWT with two-mooring failure of wind-wave misalignment scenarios. Ocean Eng. 2023, 285, 115456. [Google Scholar] [CrossRef]
- Jia, W.; Liu, Q.; Miao, W.; Yue, M.; Yang, Y.; Li, C. Investigation of barge-type FOWT in the context of concurrent and cascading failures within the mooring systems. Renew. Energy 2024, 224, 120119. [Google Scholar] [CrossRef]
- Shi, W.; Zhang, L.; Karimirad, M.; Michailides, C.; Jiang, Z.; Li, X. Combined effects of aerodynamic and second-order hydrodynamic loads for floating wind turbines at different water depths. Appl. Ocean Res. 2023, 130, 103416. [Google Scholar] [CrossRef]
- Vijay, K.; Karmakar, D.; Uzunoglu, E.; Soares, C.G. Performance of barge-type floaters for floating wind turbine. In Proceedings of the 2nd International Conference of Renewable Energies Offshore (Renew 2016), Lisbon, Portugal, 24–26 October 2016; pp. 24–26. [Google Scholar]
- Ikoma, T.; Nakamura, M.; Moritsu, S.; Aida, Y.; Masuda, K.; Eto, H. Effects of four moon pools on a floating system installed with twin-VAWTs. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Glasgow, Scotland, 9–14 June 2019; p. V001T001A016. [Google Scholar]
- Ikoma, T.; Tan, L.; Moritsu, S.; Aida, Y.; Masuda, K. Motion characteristics of a barge-type floating vertical-axis wind turbine with moonpools. Ocean Eng. 2021, 230, 109006. [Google Scholar] [CrossRef]
- Chuang, T.-C.; Yang, W.-H.; Yang, R.-Y. Experimental and numerical study of a barge-type FOWT platform under wind and wave load. Ocean Eng. 2021, 230, 109015. [Google Scholar] [CrossRef]
- Cheetham, P.; Du, S.; May, R.; Smith, S. Hydrodynamic analysis of ships side by side in waves. In Proceedings of the International Aerospace CFD Conference, Paris, France, 18–19 June 2007. [Google Scholar]
- Cummins, W. The Impulse Response Function and Ship Motions; David W. Taylor Model Basin: Washington DC, USA, 1962. [Google Scholar]
- Ogilvie, T.F. Recent progress toward the understanding and prediction of ship motions. In Proceedings of the 5th Symposium on Naval Hydrodynamics, Bergen, Norway, 10–12 September 1964; pp. 3–80. [Google Scholar]
- API. Design and Analysis of Stationkeeping Systems for Floating Offshore Structures; American Petroleum Institute: Singapore, 2005. [Google Scholar]
- Ma, K.-T.; Luo, Y.; Kwan, C.-T.T.; Wu, Y. Mooring System Engineering for Offshore Structures; Gulf Professional Publishing: Houston, TX, USA, 2019. [Google Scholar]
- Xu, X.; Yang, J.-M.; Li, X.; Xu, L. Hydrodynamic performance study of two side-by-side barges. Ships Offshore Struct. 2014, 9, 475–488. [Google Scholar] [CrossRef]
- Zou, M.; Chen, M.; Zhu, L.; Li, L.; Zhao, W. A constant parameter time domain model for dynamic modelling of multi-body system with strong hydrodynamic interactions. Ocean Eng. 2023, 268, 113376. [Google Scholar] [CrossRef]
- Molin, B.; Remy, F.; Camhi, A.; Ledoux, A. Experimental and numerical study of the gap resonances in-between two rectangular barges. In Proceedings of the 13th Congress of the International Maritime Association of the Mediterranean IMAM 2009, Istanbul, Turkey, 12–15 October 2009. [Google Scholar]
- Malta, E.B.; Cueva, M.; Nishimoto, K.; Gonçalves, R.; Masetti, I.a. Numerical moonpool modeling. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, Germany, 4–9 June 2006; pp. 493–500. [Google Scholar]
- Xu, X.; Zhang, X.; Chu, B.; Huang, H. On natural frequencies of three-dimensional moonpool of vessels in the fixed and free-floating conditions. Ocean Eng. 2020, 195, 106656. [Google Scholar] [CrossRef]
- Pauw, W.H.; Huijsmans, R.H.; Voogt, A. Advances in the hydrodynamics of side-by-side moored vessels. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10–15 June 2007; pp. 597–603. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Barge-Type Platform Properties | |
|---|---|
| Size (W × L × H) (m) | 60 × 60 × 15 |
| Moonpool (W × L × H) (m) | 20 × 20 × 15 |
| Draft (m) | 10 |
| Displacement (m3) | 32,000 |
| Mass, including the ballast (kg) | 32,200,282 |
| XCG (m) | −0.37 |
| YCG (m) | 0.00 |
| ZCG below sea level (m) | −4.86 |
| Roll inertia (kg·m2) | 9.66 × 109 |
| Pitch inertia (kg·m2) | 9.66 × 109 |
| Yaw inertia (kg·m2) | 1.93 × 1010 |
| OC5 NREL 5 MW Turbine Properties | |
|---|---|
| Rotor mass, including blade (kg) | 674,000 |
| Nacelle mass (kg) | 477,900 |
| Tower mass, including instrumentation (kg) | 493,500 |
| COG tower (m) | 43.85 |
| Hub height (m) | 90 |
| Sum mass (rotor + nacelle + tower) (kg) | 1,038,400 |
| XCG (m) | 20.00 |
| YCG (m) | 0.00 |
| ZCG (m) | 70.60 |
| Roll inertia (kg·m2) | 2.4 × 108 |
| Pitch inertia (kg·m2) | 2.4 × 108 |
| Yaw inertia (kg·m2) | 4.8 × 108 |
| Properties of the Mooring System | |
|---|---|
| Number of mooring lines | 4 × 2 |
| Anchor (Water) depth (m) | 50 |
| Depth to fairleads below SWL (m) | 5 |
| Separation between opposing anchors (m) | 424.3 |
| Unstretched line length (m) | 300 |
| Line diameter (m) | 0.162 |
| Line mass density (kg/m) | 522.25 |
| Grade of chain | R3 (stud less) |
| Minimum breaking strength (N) | 1.816 × 107 |
| Load Case | Wave | Wind | Note | |
|---|---|---|---|---|
| Hs (m) | Tp (s) | Wind Speed (m/s) | ||
| LC 1 | 4.5 | 11.81 | 14.8 | Operating condition |
| LC 2 | 4.5 | 11.81 | - | |
| LC 3 | - | - | 14.8 | |
| LC 4 | 9.5 | 17.28 | 37.4 | Extreme condition |
| LC 5 | 9.5 | 17.28 | - | |
| LC 6 | - | - | 37.4 | |
| Mooring System Condition | Strength Factor of Safety (Dynamic Analysis) | |
|---|---|---|
| Mobile Mooring and Permanent Mooring | All Intact | 1.67 |
| One Broken Line | 1.25 | |
| Mooring Lines Parameters | Initial | Modified |
|---|---|---|
| Line diameter (m) | 0.162 | 0.184 |
| Line mass density (kg/m) | 522.25 | 673.73 |
| Grade of chain | R3 (stud less) | R4 (stud less) |
| Minimum breaking strength (N) | 1.816 × 107 | 2.716 × 107 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, M.; Yang, L.; Sun, X.; Pan, J.; Zhang, K.; Lin, L.; Yun, Q.; Chen, Z. Dynamic Analysis of a Barge-Type Floating Wind Turbine Subjected to Failure of the Mooring System. J. Mar. Sci. Eng. 2024, 12, 617. https://doi.org/10.3390/jmse12040617
Chen M, Yang L, Sun X, Pan J, Zhang K, Lin L, Yun Q, Chen Z. Dynamic Analysis of a Barge-Type Floating Wind Turbine Subjected to Failure of the Mooring System. Journal of Marine Science and Engineering. 2024; 12(4):617. https://doi.org/10.3390/jmse12040617
Chicago/Turabian StyleChen, Mingsheng, Lenan Yang, Xinghan Sun, Jin Pan, Kai Zhang, Lin Lin, Qihao Yun, and Ziwen Chen. 2024. "Dynamic Analysis of a Barge-Type Floating Wind Turbine Subjected to Failure of the Mooring System" Journal of Marine Science and Engineering 12, no. 4: 617. https://doi.org/10.3390/jmse12040617
APA StyleChen, M., Yang, L., Sun, X., Pan, J., Zhang, K., Lin, L., Yun, Q., & Chen, Z. (2024). Dynamic Analysis of a Barge-Type Floating Wind Turbine Subjected to Failure of the Mooring System. Journal of Marine Science and Engineering, 12(4), 617. https://doi.org/10.3390/jmse12040617