
Automatic Identification and Suppression of Random Noise and Methods for Profile Splicing in the Sub-Bottom Profile of Deep Water

Abstract
1. Introduction
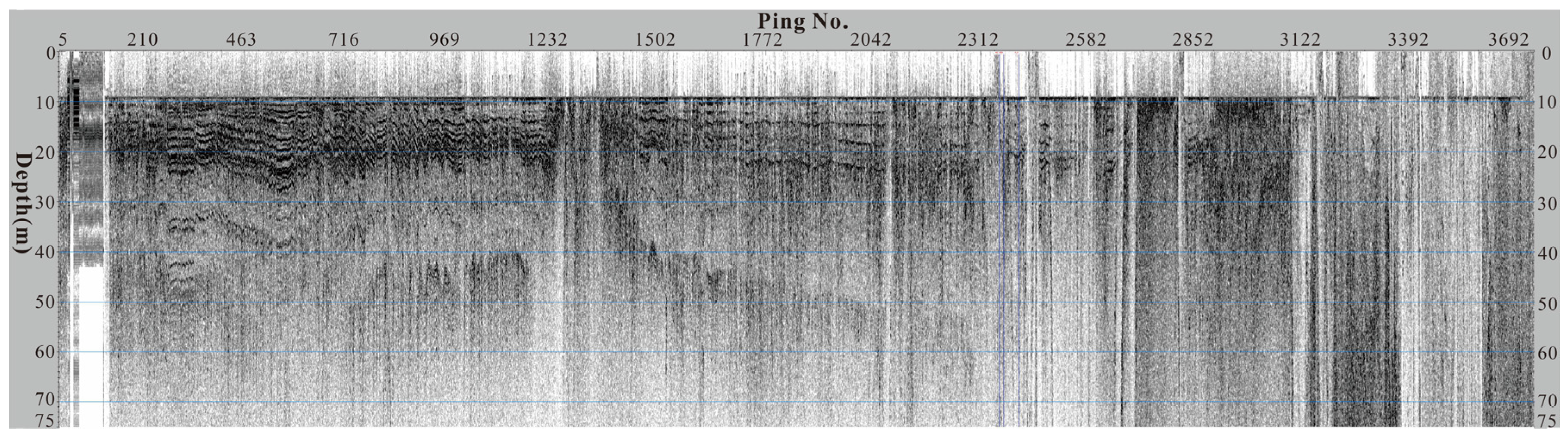
2. Problem Analysis
3. Problem Solution
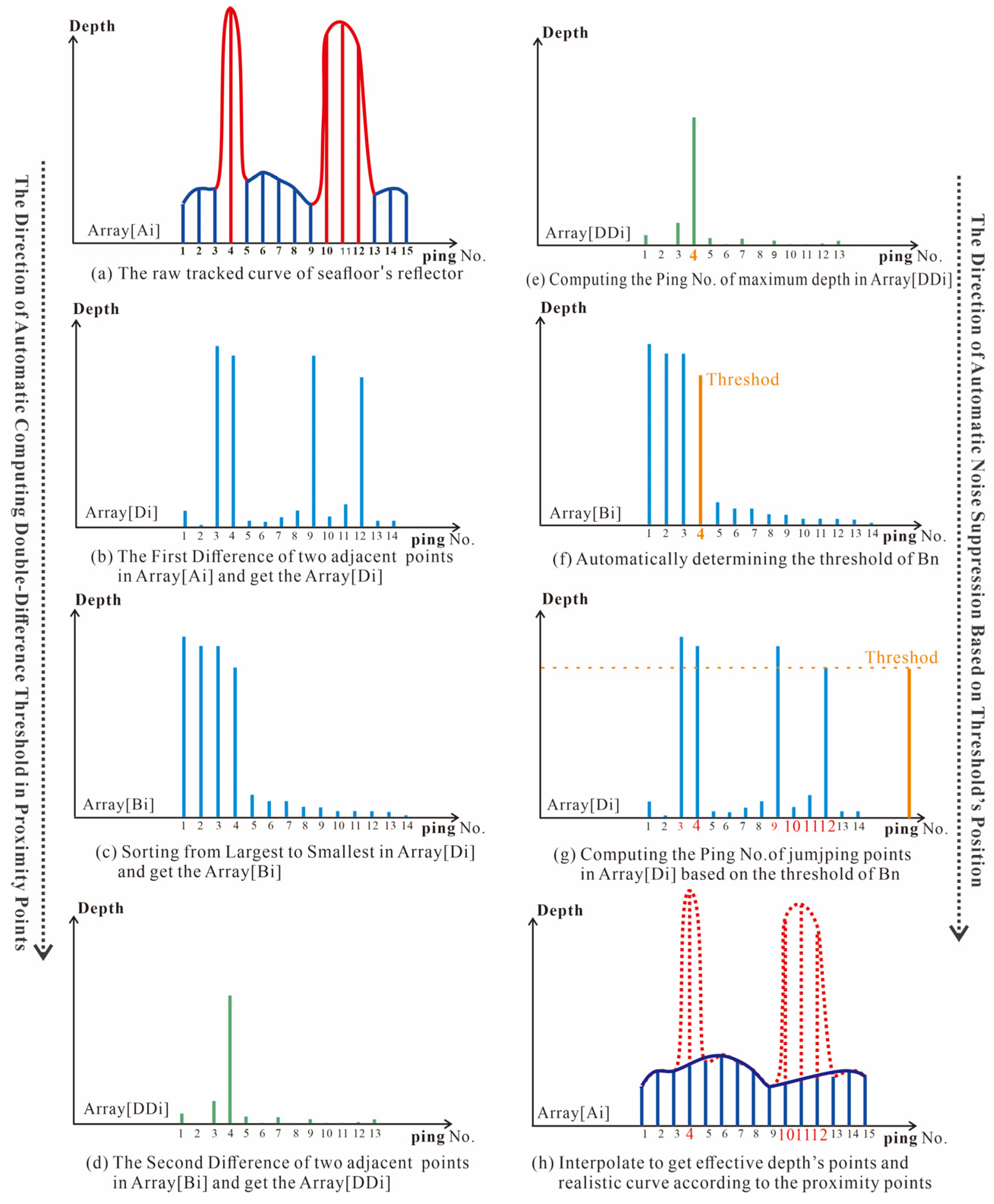
3.1. Algorithm of Proximity Points’ Double-Difference Threshold
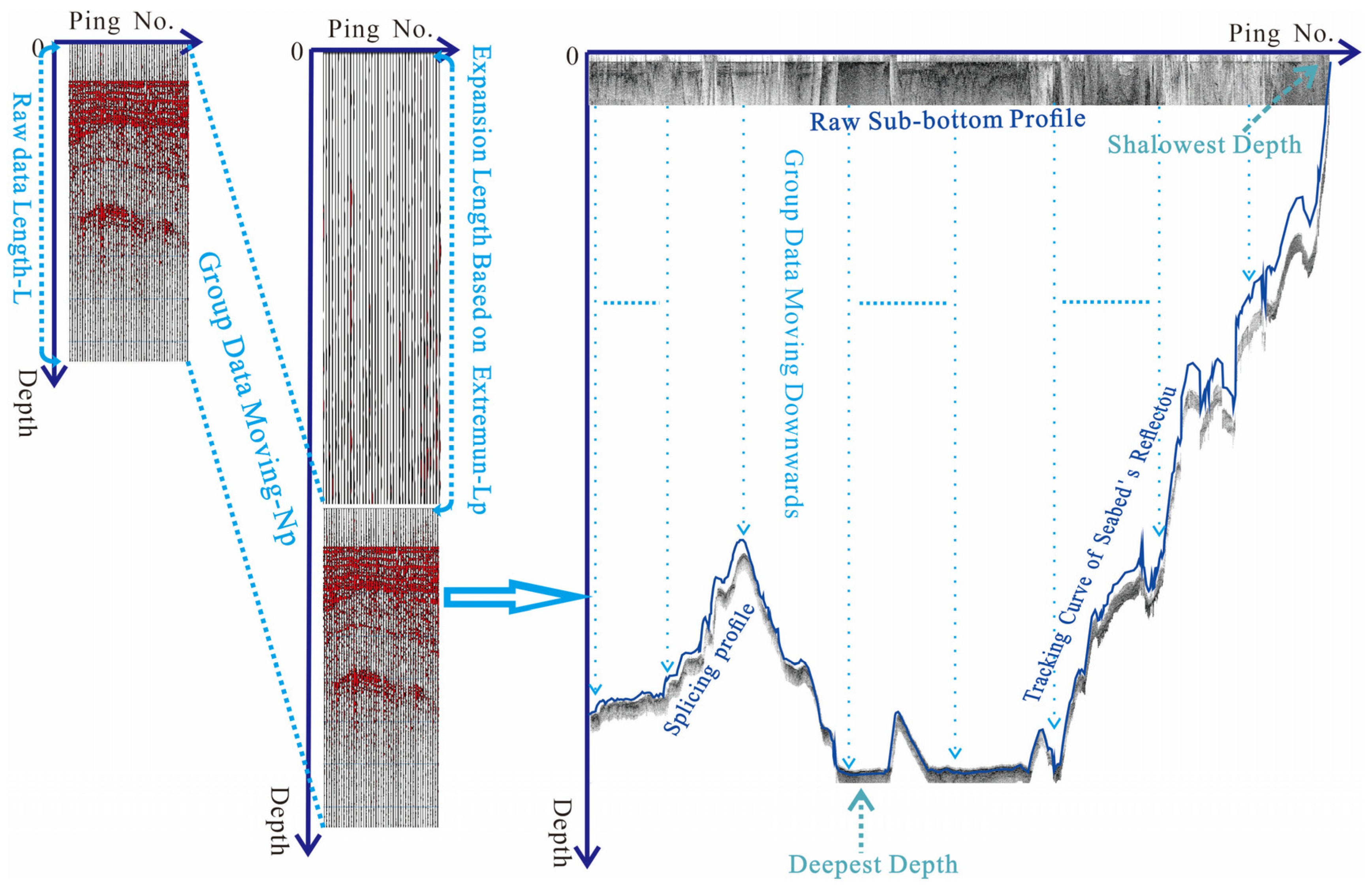
3.2. Algorithm of Content Expansion and Group Data Moving Based on Extremum in Seabed’s Depth
3.3. Processing Flow
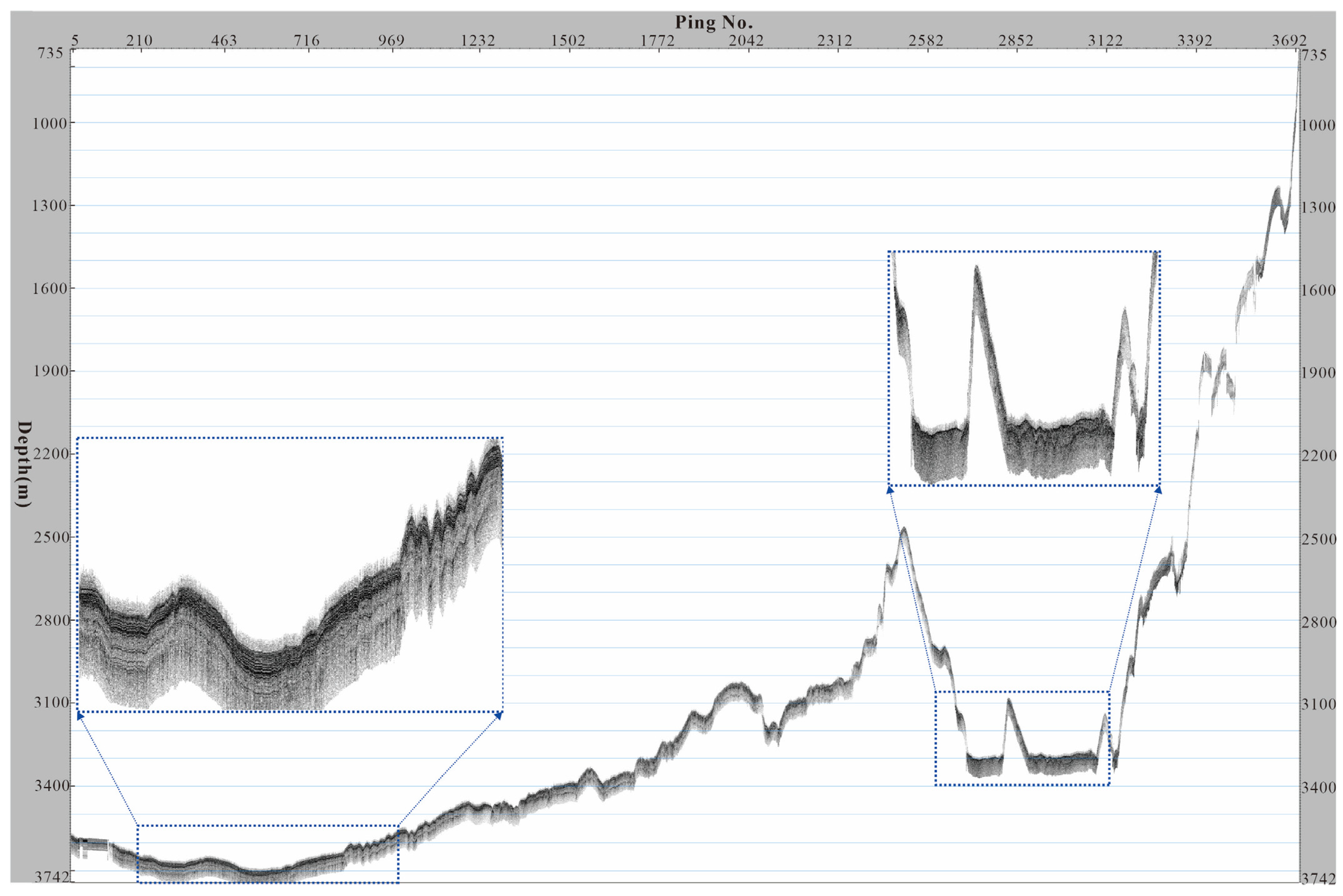
4. Processing Results
5. Conclusions
- (1)
- We developed the algorithm of proximity points’ double-difference threshold to automatically position and suppress the jumping points; then we used this algorithm to accurately suppress the random noise.
- (2)
- We introduced the algorithms of the content expansion and group data moving method based on extremum in seafloor depth; then we used these algorithms to effectively splice the sub-bottom profile data.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, G.; Zhu, J.; Zhao, D.; Xiong, Z.; Wang, C.; Ou, X.; Jia, Y.; Li, S. Development and application of sub-bottom profiler technologies. Mar. Sci. 2021, 45, 147–162. (In Chinese) [Google Scholar]
- Ding, W.; Li, J.; Su, X.; Zhang, J.; Jiang, W.; Han, F. Technology research and development for acoustic sub-bottom survey in deep sea. Acta Oceanol. Sin. 2015, 37, 70–77. (In Chinese) [Google Scholar]
- Zhu, J.; Zhou, T.; Li, T.; Chen, B.; Meng, X.; Mazhar, S. High-resolution sub-bottom profiling technology using parametric array and vector hydrophone. Appl. Acoust. 2024, 223, 110077. [Google Scholar] [CrossRef]
- Gutowski, M.; Bull, J.M.; Dix, J.K.; Henstock, T.; Hogarth, P.; White, P.R.; Leighton, T.G. Chirp sub-bottom profiler source signature design and field testing. Geophys. Res. Abstr. 2002, 23, 481–492. [Google Scholar] [CrossRef]
- Gutowski, M.; Bull, J.M.; Dix, J.K.; Henstock, T.; Hogarth, P.; White, P.R.; Leighton, T.G. Design of a 3D Chirp Sub-bottom Imaging System. Mar. Geophys. Res. 2005, 26, 157–169. [Google Scholar]
- Anderson, N.; Alotaibi, A.M. Site Assessment Using Echo Sounding, Side Scan Sonar and Sub-Bottom Profiling; A National University Transportation Center at Missouri University of Science and Technology, Tech Report; February 2014; Available online: https://ntlrepository.blob.core.windows.net/lib/52000/52700/52710/R338_Final_Report.pdf (accessed on 10 November 2024).
- Kim, Y.-J.; Koo, N.-H.; Riedel, M.; Namgoong, H.; Lee, J.-M.; Cheong, S.; Joo, Y.; Yoo, D.-G.; Chun, J.-H.; Lee, H.-Y. A case study on swell correction of Chirp sub-bottom profiler (SBP) data using multi-beam echo sounder (MBES) data. J. Appl. Geophys. 2017, 145, 100–110. [Google Scholar] [CrossRef]
- Zhang, C. Fractal analysis of muddy submarine channel slope instability from sub-bottom profile images. Mar. Georesources Geotechnol. 2021, 40, 701–711. [Google Scholar] [CrossRef]
- Gutowski, M.; Bull, J.M.; Dix, J.K.; Henstock, T.J.; Hogarth, P.; Hiller, T.; Leighton, T.G.; White, P.R. Three-dimensional high-resolution acoustic imaging of the sub-seabed. Appl. Acoust. 2008, 69, 412–421. [Google Scholar] [CrossRef]
- Luo, J.; Pan, G.; Ding, W. Research on processing technique of eliminating wave-induced distortion effect on sub-bottom profile. Tech. Acoust. 2009, 28, 21–24. (In Chinese) [Google Scholar]
- Wu, J.; Li, C.; Zhou, W. Comparison between the Noise suppressing Abilities of the Median Filters and the Average Filters. J. Nanchang Univ. Eng. Technol. 1998, 20, 32–34. (In Chinese) [Google Scholar]
- Ding, W.; Feng, X.; Fu, X.; Gou, Z.; Wei, Y. Marine wave correction research on single channel seismic data and sub-bottom profile. Acta Oceanol. Sin. 2012, 34, 91–98. (In Chinese) [Google Scholar]
- Amri, U. Recent Sediment Analysis, Study Case: Sub Bottom Profiler Data Line 8 Geomarine Research Vessels. J. Wetl. Environ. Manag. 2019, 7, 123. [Google Scholar] [CrossRef]
- Zhang, J.; Gan, X.; Zhou, Z.; Yang, J. 4D track prediction of aircraft based on improved sliding window polynomial fitting method. Adv. Aeronaut. Sci. Eng. 2019, 10, 601–608. (In Chinese) [Google Scholar]
- Saleh, M.; Rabah, M. Seabed sub-bottom sediment classification using parametric sub-bottom profiler. NRIAG J. Astron. Geophys. 2016, 5, 87–95. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, X.; Ding, W. Automatic Identification and Suppression of Random Noise and Methods for Profile Splicing in the Sub-Bottom Profile of Deep Water. J. Mar. Sci. Eng. 2024, 12, 2069. https://doi.org/10.3390/jmse12112069
Feng X, Ding W. Automatic Identification and Suppression of Random Noise and Methods for Profile Splicing in the Sub-Bottom Profile of Deep Water. Journal of Marine Science and Engineering. 2024; 12(11):2069. https://doi.org/10.3390/jmse12112069
Chicago/Turabian StyleFeng, Xia, and Weifeng Ding. 2024. "Automatic Identification and Suppression of Random Noise and Methods for Profile Splicing in the Sub-Bottom Profile of Deep Water" Journal of Marine Science and Engineering 12, no. 11: 2069. https://doi.org/10.3390/jmse12112069
APA StyleFeng, X., & Ding, W. (2024). Automatic Identification and Suppression of Random Noise and Methods for Profile Splicing in the Sub-Bottom Profile of Deep Water. Journal of Marine Science and Engineering, 12(11), 2069. https://doi.org/10.3390/jmse12112069