
Attitude Practical Stabilization of Underactuated Autonomous Underwater Vehicles in Vertical Plane


Abstract
1. Introduction
- 1
- To avoid the singularity of Euler angles and the ambiguity of quaternions, the methods of rotation matrix and transverse function are introduced to design the attitude controller of underactuated AUVs. Moreover, unlike in research [21], a kinematic controller based on exponential mapping is designed to address the singularity issue of the traditional error function.
- 2
- A new AUV saturation auxiliary system is modified based on [23] to achieve better control input compensation effects. Moreover, considering the approximation error of the IT2-FLS, the small gain theorem is introduced to design an inner loop controller to improve the robustness of the control system.
2. Preliminaries and Problem Formulation
2.1. Notations and Definitions
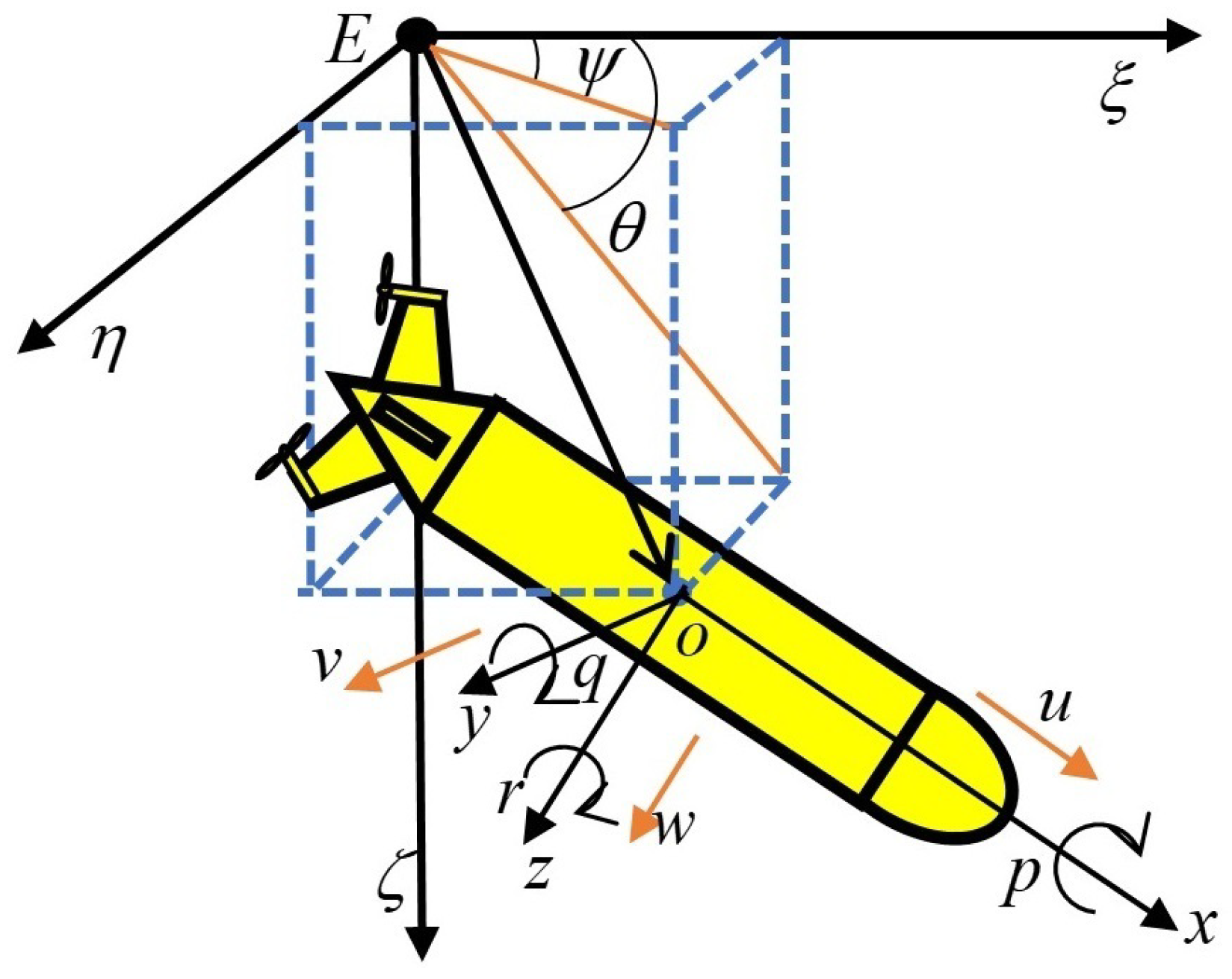
2.2. AUV Model on SO(3)
2.3. Problem Formulation
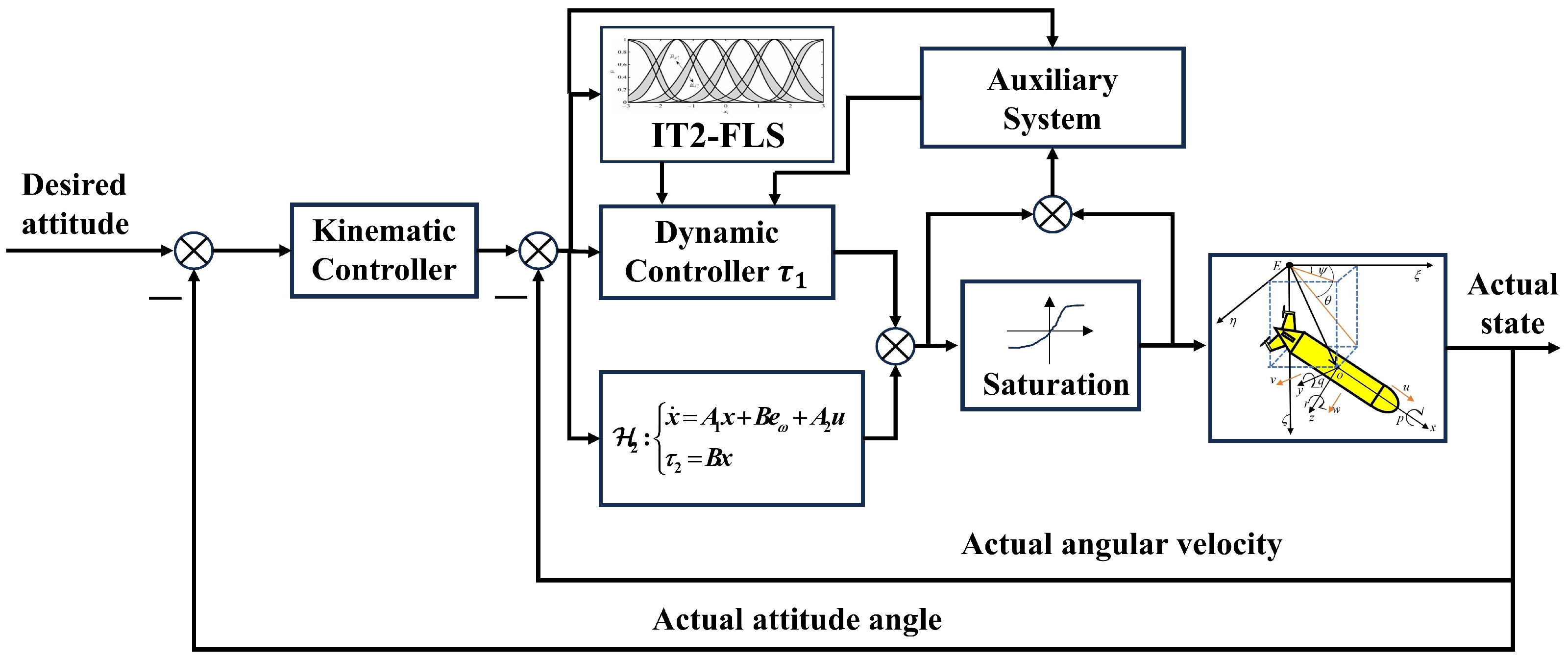
3. Controller Design and Stability Analysis
3.1. Kinematic Controller That Is Based on the Transverse Function
3.2. Dynamic Controller Based on the Small Gain Theorem
3.3. Dynamic Controller with Input Saturation
4. Simulation Results
4.1. Selection of the Controller Parameters
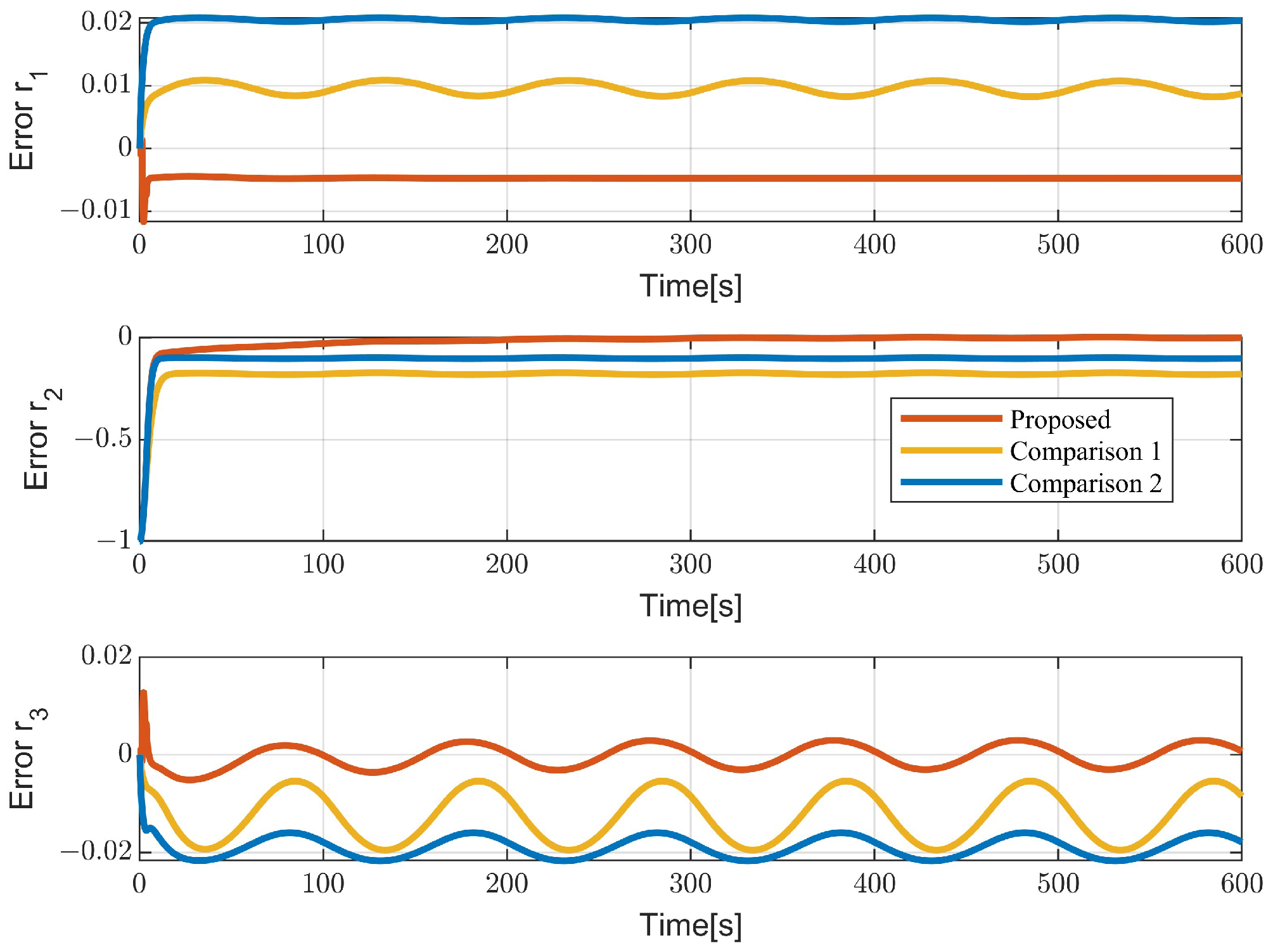
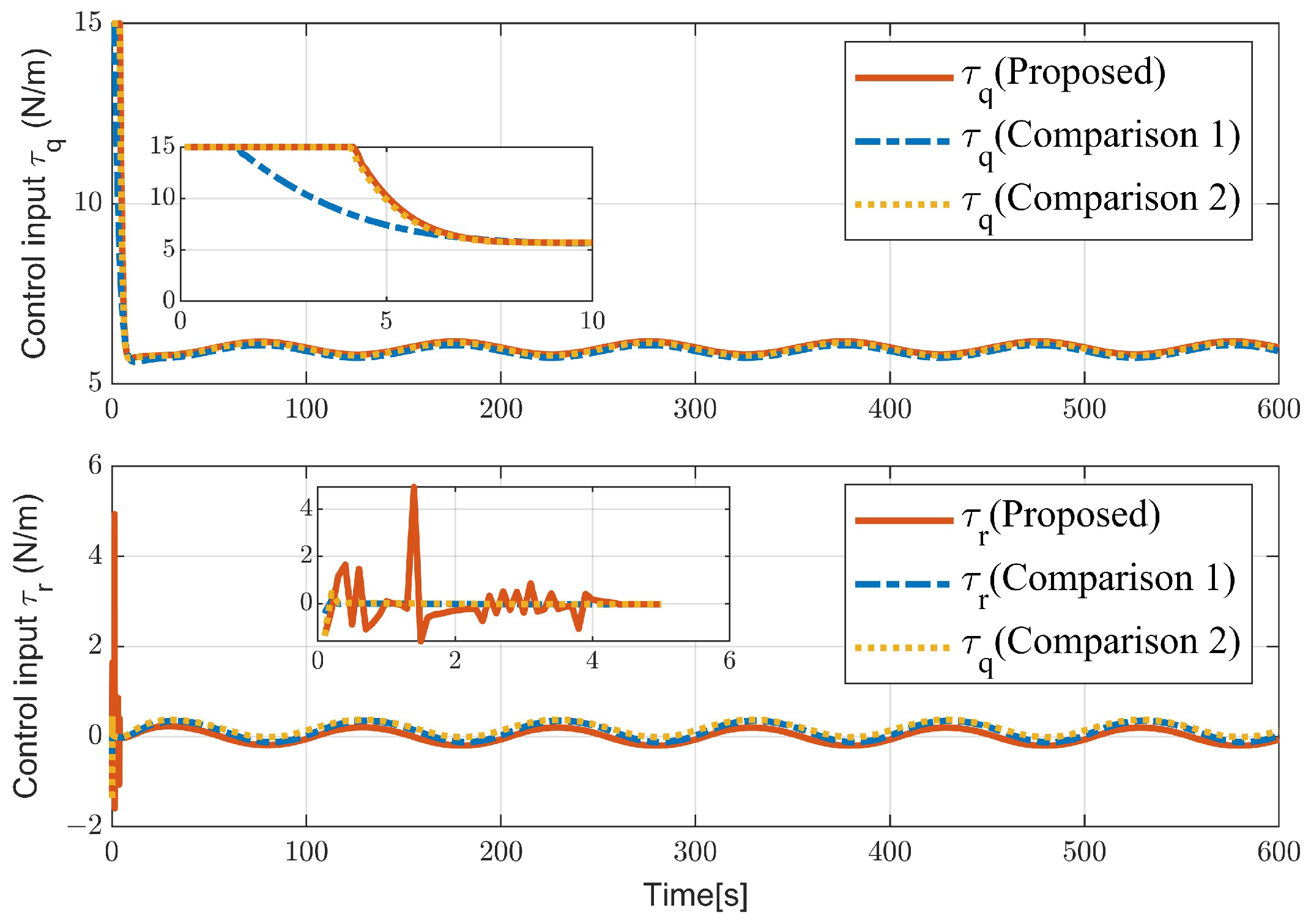
4.2. Controller Performance Verification
4.2.1. Scenario 1
4.2.2. Scenario 2
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Hydrodynamic Parameters
References
- Richmond, K.; Flesher, C.; Tanner, N.; Siegel, V.; Stone, W.C. Autonomous exploration and 3-D mapping of underwater caves with the human-portable SUNFISH® AUV. In Proceedings of the Global Oceans 2020: Singapore—U.S. Gulf Coast, Biloxi, MS, USA, 5–30 October 2020. [Google Scholar] [CrossRef]
- Byron, J.; Tyce, R. Designing a vertical/horizontal AUV for deep ocean sampling. In Proceedings of the 2007 OCEANS, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1299–1308. [Google Scholar]
- Liu, Z.; Cai, W.; Zhang, M.; Lv, S. Improved Integral Sliding Mode Control-Based Attitude Control Design and Experiment for High Maneuverable AUV. J. Mar. Sci. Eng. 2022, 10, 795. [Google Scholar] [CrossRef]
- Xu, R.; Tang, G.; Han, L.; Huang, H.; Xie, D. Robust Finite-Time Attitude Tracking Control of a CMG-Based AUV With Unknown Disturbances and Input Saturation. IEEE Access 2019, 7, 56409–56422. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, M.; Chen, J.; Yin, B. Trajectory tracking with quaternion-based attitude representation for autonomous underwater vehicle based on terminal sliding mode control. Appl. Ocean Res. 2020, 104, 102342. [Google Scholar] [CrossRef]
- Fjellstad, O.; Fossen, T. Position and attitude tracking of auvs—A quaternion feedback approach. IEEE J. Ocean. Eng. 1994, 19, 512–518. [Google Scholar] [CrossRef]
- Zhu, C.; Huang, B.; Su, Y.; Zheng, Y.; Zheng, S. Finite-time rotation-matrix-based tracking control for autonomous underwater vehicle with input saturation and actuator faults. Int. J. Robust Nonlinear Control 2022, 32, 2925–2949. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, Y.; Wan, L.; Chen, G.; Cao, Y. Rotation matrix-based finite-time trajectory tracking control of AUV with output constraints and input quantization. Ocean Eng. 2024, 293, 116570. [Google Scholar] [CrossRef]
- Chaturvedi, N.A.; Sanyal, A.K.; McClamroch, N.H. Rigid-Body Attitude Control using rotation matrices for continuous, singularity-free control laws. IEEE Control Syst. Mag. 2011, 31, 30–51. [Google Scholar] [CrossRef]
- Ferreira, B.M.; Jouffroy, J.; Matos, A.C.; Cruz, N.A. Control and guidance of a hovering AUV pitching up or down. In Proceedings of the 2012 OCEANS, Hampton Roads, VA, USA, 14–19 October 2012. [Google Scholar]
- Gavrilina, E.; Chestnov, V. Singularity-Free Attitude Control of the Unmanned Underwater Vehicle. In Proceedings of the 2020 24th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 8–10 October 2020; pp. 512–519. [Google Scholar] [CrossRef]
- Bhat, S.; Bernstein, D. A topological obstruction to continuous global stabilization of rotational motion and the unwinding phenomenon. Syst. Control Lett. 2000, 39, 63–70. [Google Scholar] [CrossRef]
- Huang, Z.; Su, Z.; Huang, B.; Song, S.; Li, J. Quaternion-based finite-time fault-tolerant trajectory tracking control for autonomous underwater vehicle without unwinding. ISA Trans. 2022, 131, 15–30. [Google Scholar] [CrossRef]
- Su, Z.; Lin, X.; Huang, B.; Zhao, D.; Sun, H. Improved dynamic event-triggered anti-unwinding control for autonomous underwater vehicles. Ocean Eng. 2023, 272, 113619. [Google Scholar] [CrossRef]
- Brockett, R.W. Asymptotic Stability and Feedback Stabilization, Differential Geometric Control Theory. Prog. Math. 1983, 27, 181–191. [Google Scholar]
- Li, Y.; Li, Y.; Wu, Q. Design for three-dimensional stabilization control of underactuated autonomous underwater vehicles. Ocean Eng. 2018, 150, 327–336. [Google Scholar] [CrossRef]
- Akhtar, A.; Waslander, S.L. Controller Class for Rigid Body Tracking on SO(3). IEEE Trans. Autom. Control 2021, 66, 2234–2241. [Google Scholar] [CrossRef]
- Yu, Y.; Ding, X. A Global Tracking Controller for Underactuated Aerial Vehicles: Design, Analysis, and Experimental Tests on Quadrotor. IEEE-ASME Trans. Mechatron. 2016, 21, 2499–2511. [Google Scholar] [CrossRef]
- Zhu, C.; Jun, L.; Huang, B.; Su, Y.; Zheng, Y. Trajectory tracking control for autonomous underwater vehicle based on rotation matrix attitude representation. Ocean Eng. 2022, 252, 111206. [Google Scholar] [CrossRef]
- Morin, P.; Samson, C. Practical stabilization of driftless systems on Lie groups: The transverse function approach. IEEE Trans. Autom. Control 2003, 48, 1496–1508. [Google Scholar] [CrossRef]
- Gui, H.; Vukovich, G.; Xu, S. Attitude Tracking of a Rigid Spacecraft Using Two Internal Torques. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2900–2913. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, M.; Qin, H.; Wang, H.; Ding, Z. Full prescribed performance trajectory tracking control strategy of autonomous underwater vehicle with disturbance observer. ISA Trans. 2024, 151, 117–130. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Li, L. Trajectory tracking control of underwater vehicle considering state constraint and actuator saturation. Control Decis. 2024, 39, 1778–1786. [Google Scholar] [CrossRef]
- Li, J.; Du, J.; Chen, C.L.P. Command-Filtered Robust Adaptive NN Control With the Prescribed Performance for the 3-D Trajectory Tracking of Underactuated AUVs. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 6545–6557. [Google Scholar] [CrossRef]
- Zhang, J.; Xiang, X.; Zhang, Q.; Li, W. Neural network-based adaptive trajectory tracking control of underactuated AUVs with unknown asymmetrical actuator saturation and unknown dynamics. Ocean Eng. 2020, 218, 108193. [Google Scholar] [CrossRef]
- Yu, C.; Xiang, X.; Wilson, P.A.; Zhang, Q. Guidance-Error-Based Robust Fuzzy Adaptive Control for Bottom Following of a Flight-Style AUV With Saturated Actuator Dynamics. IEEE Trans. Cybern. 2020, 50, 1887–1899. [Google Scholar] [CrossRef] [PubMed]
- Liang, X.; Wan, L.; Blake, J.I.R.; Shenoi, R.A.; Townsend, N. Path Following of an Underactuated AUV Based on Fuzzy Backstepping Sliding Mode Control. Int. J. Adv. Robot. Syst. 2016, 13, 122. [Google Scholar] [CrossRef]
- Thanh, P.N.N.; Thuyen, N.A.; Anh, H.P.H. Adaptive fuzzy 3-D trajectory tracking control for autonomous underwater vehicle (AUV) using modified integral barrier lyapunov function. Ocean Eng. 2023, 283, 115027. [Google Scholar] [CrossRef]
- Wang, H.D.; Zhai, Y.X.; Shah, U.H.; Karkoub, M.; Li, M. Adaptive fuzzy control of underwater vehicle manipulator system with dead-zone band input nonlinearities via fuzzy performance and disturbance observers. Ocean Eng. 2023, 277, 114194. [Google Scholar] [CrossRef]
- Zadeh, L. The concept of a linguistic variable and its application to approximate reasoning. III. Inf. Sci. 1975, 9, 43–80. [Google Scholar] [CrossRef]
- Liang, Q.; Mendel, J. Interval type-2 fuzzy logic systems: Theory and design. IEEE Trans. Fuzzy Syst. 2000, 8, 535–550. [Google Scholar] [CrossRef]
- Sarabakha, A.; Fu, C.; Kayacan, E.; Kumbasar, T. Type-2 Fuzzy Logic Controllers Made Even Simpler: From Design to Deployment for UAVs. IEEE Trans. Ind. Electron. 2018, 65, 5069–5077. [Google Scholar] [CrossRef]
- Xia, Y.; Xu, K.; Li, Y.; Xu, G.; Xiang, X. Improved line-of-sight trajectory tracking control of under-actuated AUV subjects to ocean currents and input saturation. Ocean Eng. 2019, 174, 14–30. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, J.; Yu, J.; Liu, D. Single neural network-based asymptotic adaptive control for an autonomous underwater vehicle with uncertain dynamics. Ocean Eng. 2023, 286, 115553. [Google Scholar] [CrossRef]
- Sedghi, F.; Arefi, M.M.; Abooee, A.; Kaynak, O. Adaptive Robust Finite-Time Nonlinear Control of a Typical Autonomous Underwater Vehicle With Saturated Inputs and Uncertainties. IEEE-ASME Trans. Mechatron. 2021, 26, 2517–2527. [Google Scholar] [CrossRef]
- Sedghi, F.; Arefi, M.M.; Abooee, A. Command filtered-based neuro-adaptive robust finite-time trajectory tracking control of autonomous underwater vehicles under stochastic perturbations. Neurocomputing 2023, 519, 158–172. [Google Scholar] [CrossRef]
- Yang, Y.; Ren, J. Adaptive fuzzy robust tracking controller design via small gain approach and its application. IEEE Trans. Fuzzy Syst. 2003, 11, 783–795. [Google Scholar] [CrossRef]
- Teel, A. A nonlinear small gain theorem for the analysis of control systems with saturation. IEEE Trans. Autom. Control 1996, 41, 1256–1270. [Google Scholar] [CrossRef]
- Ying, H. General interval type-2 Mamdani fuzzy systems are universal approximators. In Proceedings of the 2008 Annual Meeting of the North-American-Fuzzy-Information-Processing-Society, New York, NY, USA, 19–22 May 2008; pp. 294–299. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | |
|---|---|---|
| Pitch Channel | Yaw Channel | |
| 10 | 10 | |
| B | 1 | 1 |
| 2 | 2 | |
| 0.15 | 0.11 | |
| 23.5 | 22.5 | |
| 0.2 | 0.2 | |
| 0.01 | 0.01 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Bao, H.; Li, Y.; Zhang, H. Attitude Practical Stabilization of Underactuated Autonomous Underwater Vehicles in Vertical Plane. J. Mar. Sci. Eng. 2024, 12, 1940. https://doi.org/10.3390/jmse12111940
Wang Y, Bao H, Li Y, Zhang H. Attitude Practical Stabilization of Underactuated Autonomous Underwater Vehicles in Vertical Plane. Journal of Marine Science and Engineering. 2024; 12(11):1940. https://doi.org/10.3390/jmse12111940
Chicago/Turabian StyleWang, Yuliang, Han Bao, Yiping Li, and Hongbin Zhang. 2024. "Attitude Practical Stabilization of Underactuated Autonomous Underwater Vehicles in Vertical Plane" Journal of Marine Science and Engineering 12, no. 11: 1940. https://doi.org/10.3390/jmse12111940
APA StyleWang, Y., Bao, H., Li, Y., & Zhang, H. (2024). Attitude Practical Stabilization of Underactuated Autonomous Underwater Vehicles in Vertical Plane. Journal of Marine Science and Engineering, 12(11), 1940. https://doi.org/10.3390/jmse12111940